
An Effective Simulation Scheme for Predicting the Aerodynamic Heat of a Scramjet-Propelled Vehicle


Abstract
:1. Introduction
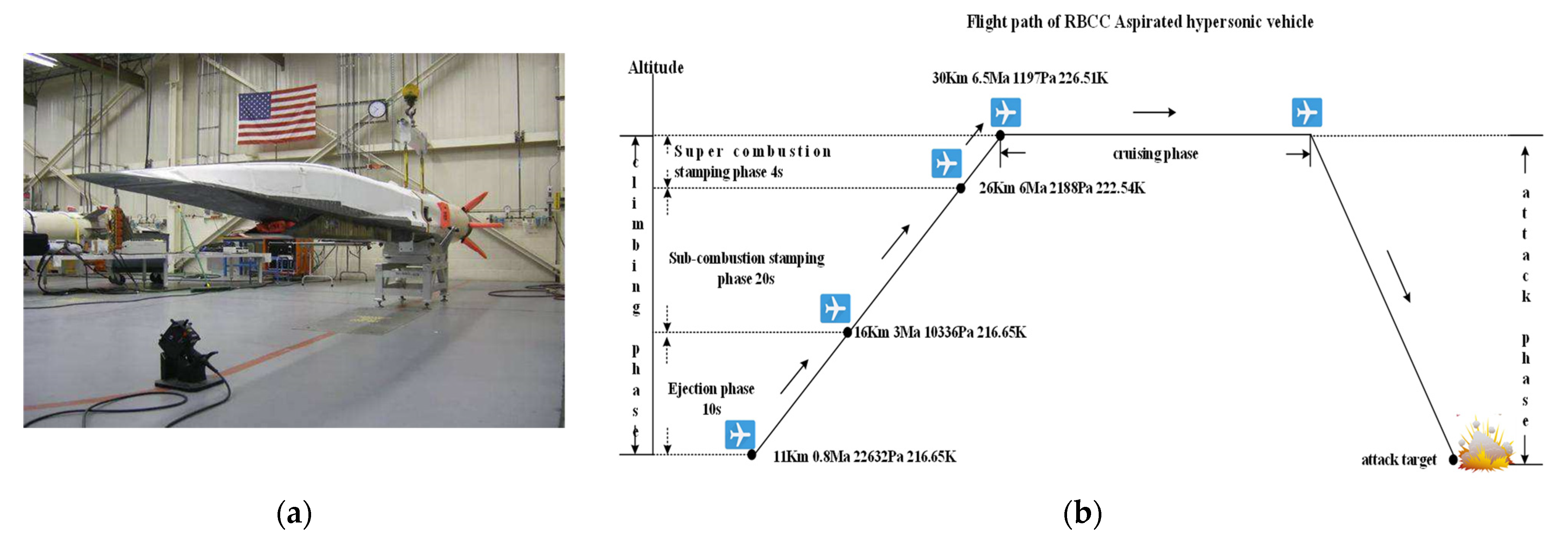
2. Flight Path of Scramjet-Propelled Vehicle and Numerical Procedures
3. Validation Tests
3.1. Transonic Stage
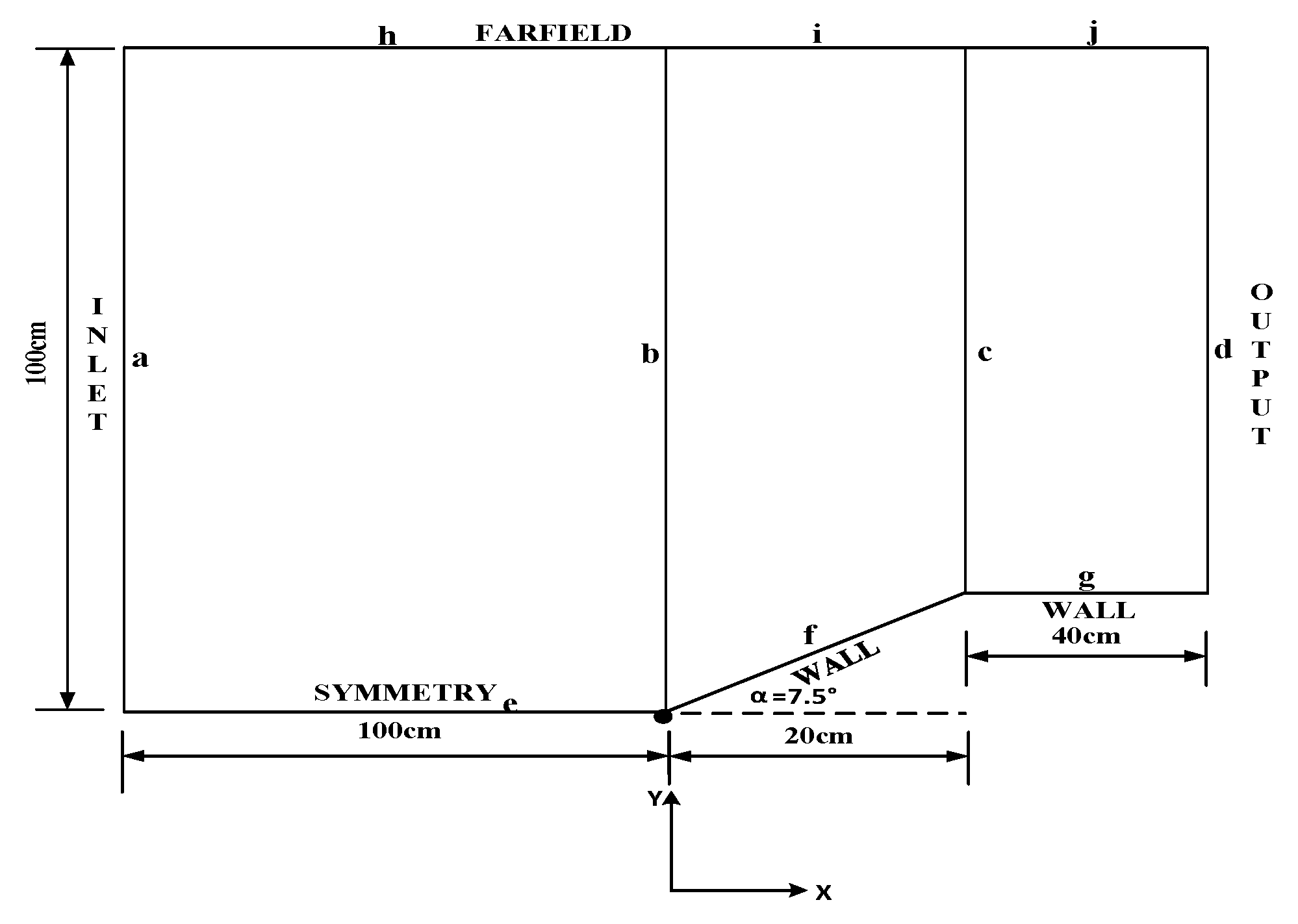
3.1.1. Grid Strategy
3.1.2. Numerical Method
3.1.3. Simulation Parameters
3.2. Supersonic Stage
3.2.1. Grid Strategy
3.2.2. Numerical Method
3.2.3. Simulation Parameters
3.3. High Supersonic Stage
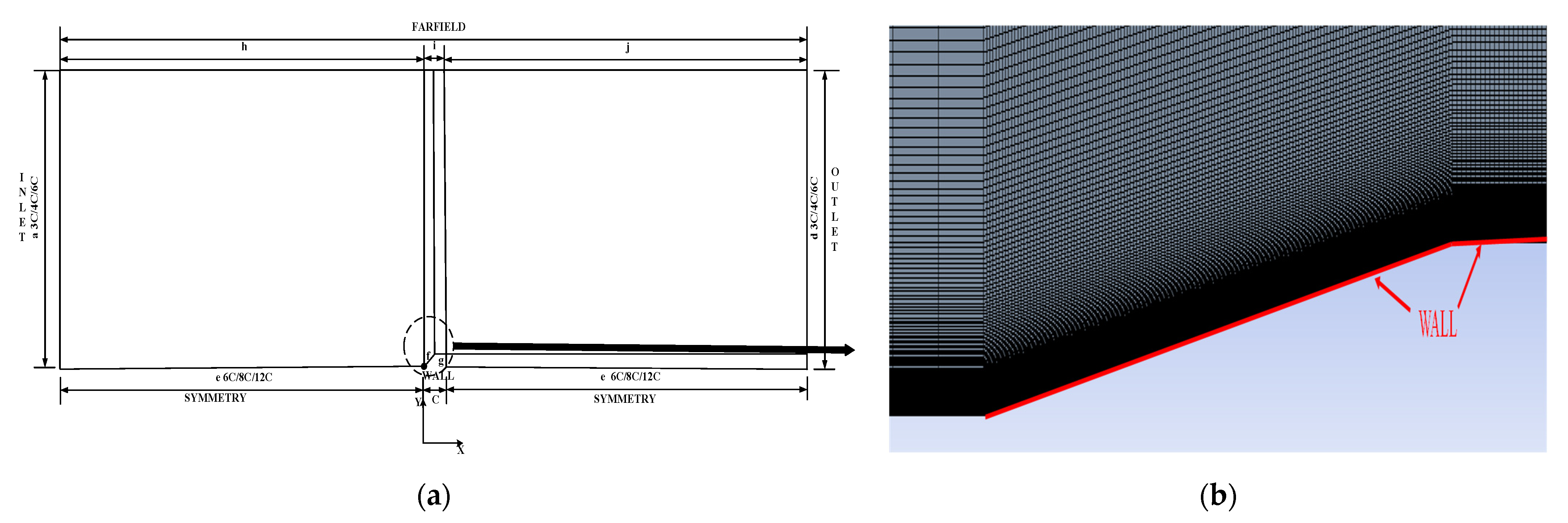
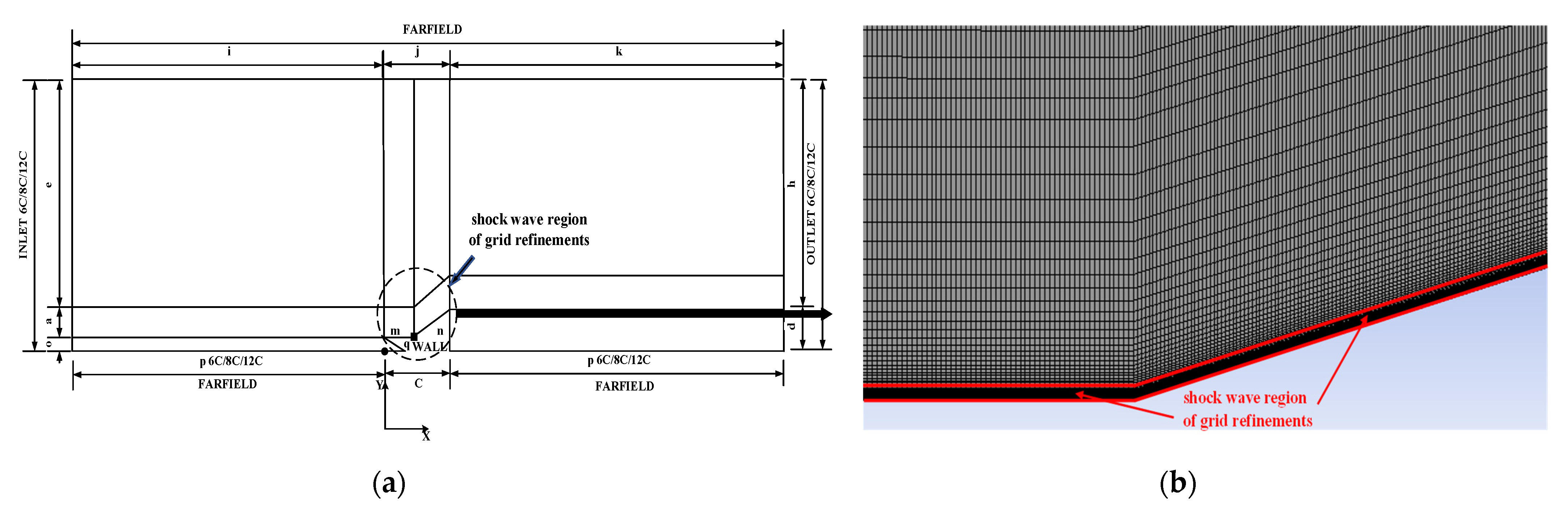
3.3.1. Grid Strategy
3.3.2. Numerical Method
3.3.3. Simulation Parameters
3.4. Hypersonic Stage
3.4.1. Grid Strategy
3.4.2. Numerical Method
3.4.3. Simulation Parameters
4. Simulation Scheme and Aerothermal Prediction
5. Conclusions
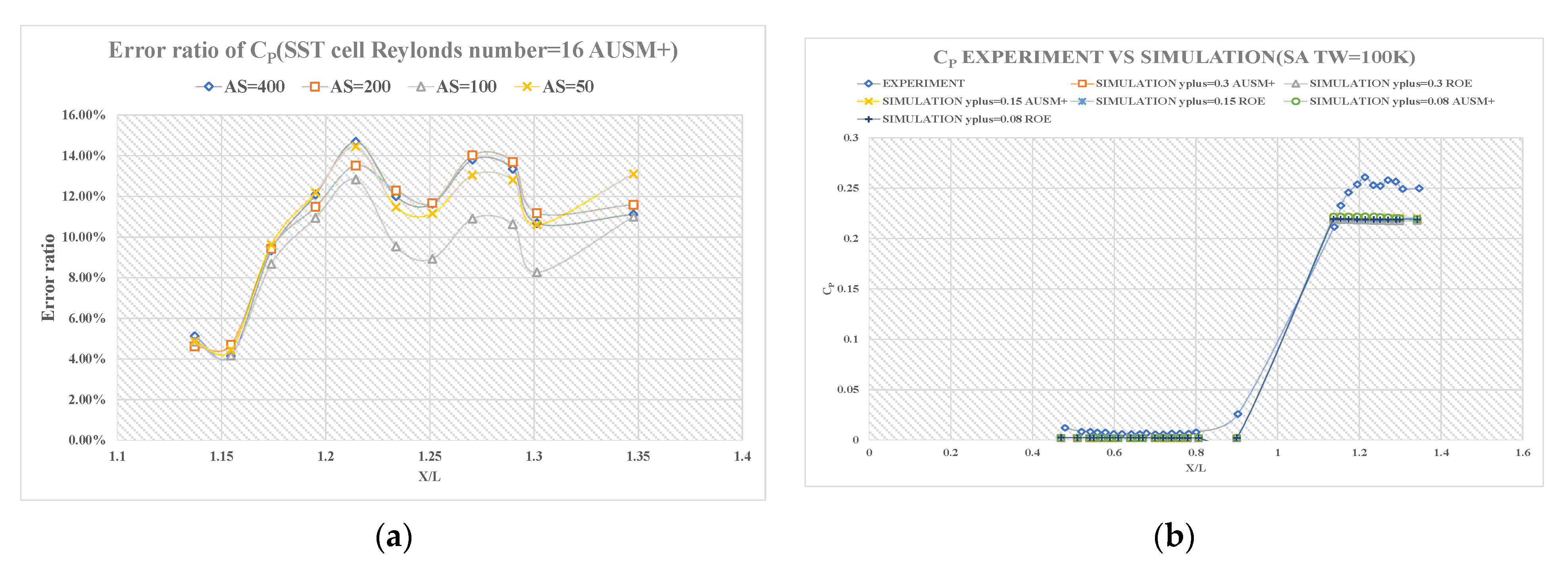
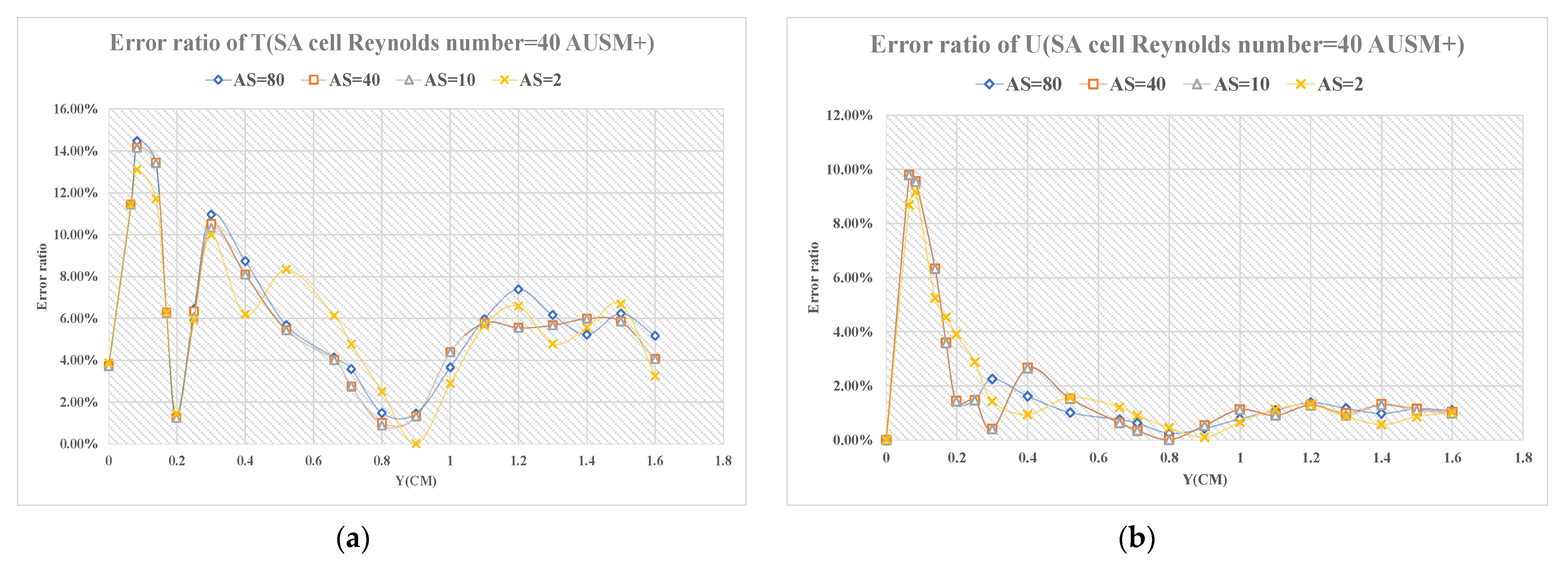
- For the wedge section in the scramjet-propelled vehicle heating prediction, the suggested value of cell Reynolds number and aspect ratio of wall cells near the shock are different from those for blunt bodies. At the high supersonic stage, the ideal cell Reynolds number should be no larger than 16. At the hypersonic stage, neither the ideal cell Reynolds number, nor the aspect ratio of the wall cells near the shock should be larger than 40.
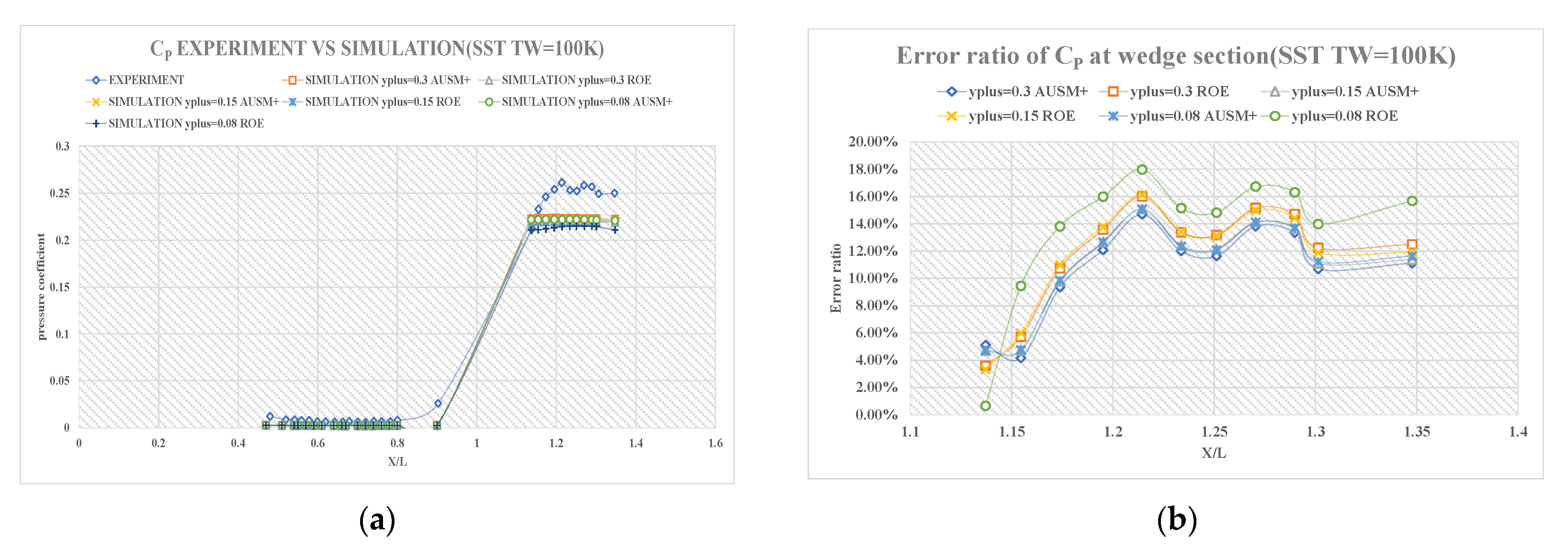
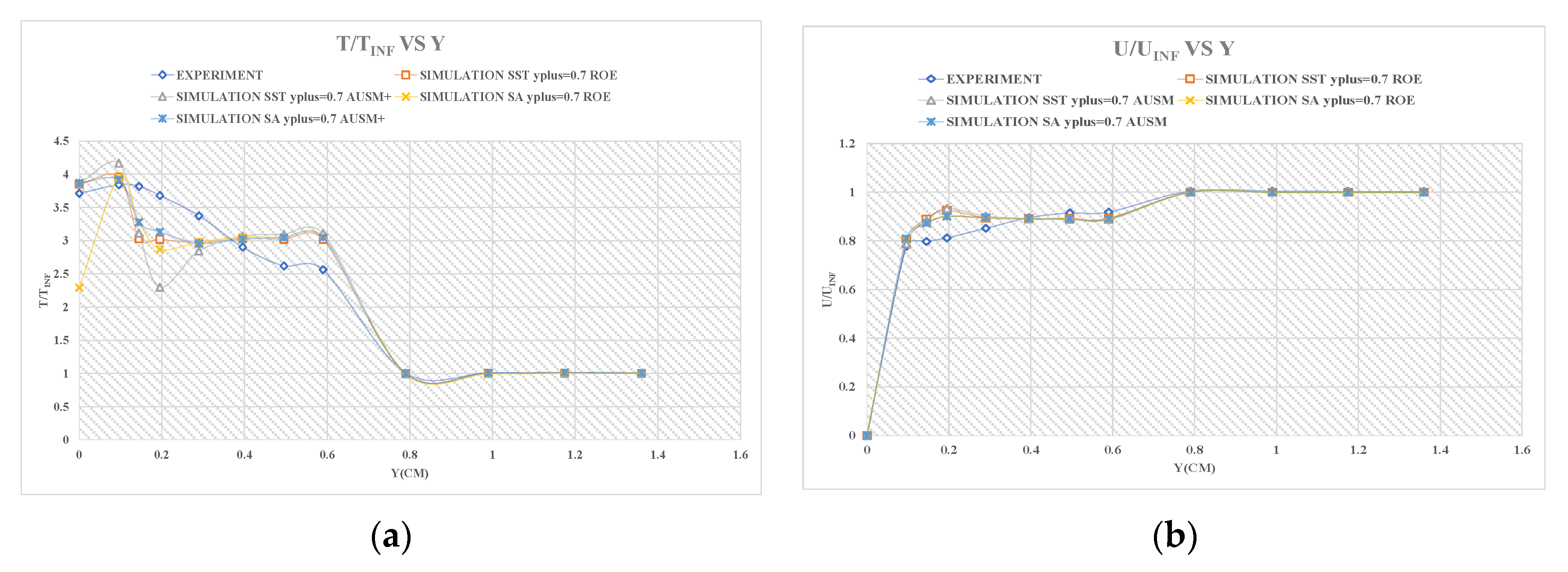
- For the wedge section in the scramjet-propelled vehicle heating prediction, with the same grid strategy, upwind scheme, solver, and so on, the AUSM+ flux type performs better than Roe’s FDS flux type. The Spalart-Allmaras turbulence model performs better at the transonic stage and the hypersonic stage, while the SST k-omega performs better at the supersonic stage and the high supersonic stage.
- Smaller cell Reynolds numbers are not necessarily better. On the one hand, this may cause the quality of the mesh to decrease. On the other hand, as described in Section 3.3 and Section 3.4, their improvement of calculation accuracy is limited; they even reduce the accuracy. The value of the aspect ratio is similar to the cell Reynolds number. It is necessary to confirm the appropriate values through CFD analysis based on numerical results and TVR plots.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, F.; Liu, H.; Zhang, S. Time-adaptive loosely coupled analysis on fluid–thermal–structural behaviors of hypersonic wing structures under sustained aeroheating. Aerosp. Sci. Technol. 2018, 78, 620–636. [Google Scholar] [CrossRef]
- Qu, F.; Kong, W.; Sun, D.; Bai, J. Shock-stable flux scheme for predicting aerodynamic heating load of hypersonic airliners. Sci. China Ser. G: Physics, Mech. Astron. 2019, 62, 984711. [Google Scholar] [CrossRef]
- Tao, W.Q. Advances in Computational Heat Transfer, 1st ed.; Science Press: Beijing, China, 2002. (In Chinese) [Google Scholar]
- Qu, F.; Sun, D.; Bai, J.; Zuo, G.; Yan, C. Numerical investigation of blunt body’s heating load reduction with combination of spike and opposing jet. Int. J. Heat Mass Transf. 2018, 127, 7–15. [Google Scholar] [CrossRef]
- Qu, F.; Chen, J.; Sun, D.; Bai, J.; Yan, C. A new all-speed flux scheme for the Euler equations. Comput. Math. Appl. 2019, 77, 1216–1231. [Google Scholar] [CrossRef]
- Cook, C.; Balachandar, S.; Chung, J.; Vu-Quoc, L. A generalized Characteristic-Based Split projection method for Navier-Stokes with real fluids. Int. J. Heat Mass Transf. 2018, 124, 1045–1058. [Google Scholar] [CrossRef]
- Tsien, H.-S. Superaerodynamics, Mechanics of Rarefied Gases. J. Aeronaut. Sci. 1946, 13, 653–664. [Google Scholar] [CrossRef]
- Lee, J.; Rho, O.H. Accuracy of AUSM+ Scheme in Hypersonic Blunt Body Flow Calculations, 8th ed.; AIAA International Space Planes and Hypersonic Systems and Technologies Conference: Norfolk, VA, USA, 1998. [Google Scholar]
- Xiang, Z.; Chao, Y.; Wei, Y.; Haibo, H. Investigation of the grid-dependency in heat transfer simulation for hypersonic vehicle. Tactical Missile Technol. 2016, 3, 21–27. (In Chinese) [Google Scholar]
- Qu, F.; Sun, D.; Zuo, G. A study of upwind schemes on the laminar hypersonic heating predictions for the reusable space vehicle. Acta Astronaut. 2018, 147, 412–420. [Google Scholar] [CrossRef]
- Di Venuta, I.; Petracci, I.; Angelino, M.; Boghi, A.; Gori, F. Numerical simulation of mass transfer and fluid flow evolution of a rectangular free jet of air. Int. J. Heat Mass Transf. 2018, 117, 235–251. [Google Scholar] [CrossRef] [Green Version]
- Kitamura, K.; Shima, E.; Nakamura, Y.; Roe, P.L. Evaluation of Euler Fluxes for Hypersonic Heating Computations. AIAA J. 2010, 48, 763–776. [Google Scholar] [CrossRef]
- Qu, F.; Sun, D.; Yan, C. A new flux splitting scheme for the Euler equations II: E-AUSMPWAS for all speeds. Commun. Nonlinear Sci. Numer. Simul. 2018, 57, 58–79. [Google Scholar] [CrossRef]
- Qu, F.; Chen, J.; Sun, D.; Bai, J.; Zuo, G. A grid strategy for predicting the space plane’s hypersonic aerodynamic heating loads. Aerosp. Sci. Technol. 2019, 86, 659–670. [Google Scholar] [CrossRef]
- Smirnov, N.; Penyazkov, O.; Sevrouk, K.; Nikitin, V.; Stamov, L.; Tyurenkova, V. Detonation onset following shock wave focusing. Acta Astronaut. 2017, 135, 114–130. [Google Scholar] [CrossRef]
- Li, J.Z.; Yan, C.; Ke, L.; Zhang, S.T. Research on scheme effect of computational fluid dynamics in aerothermal. J. Beijing Univ. Aeronaut. Astronaut. 2003, 11, 1022–1025. (In Chinese) [Google Scholar]
- Yang, J.L.; Liu, M. Influence of limiters on numerical simulation of heating distributions for hypersonic bodies. J. Beijing Univ. Aeronaut. Astronaut. 2014, 40, 417–421. (In Chinese) [Google Scholar]
- Zheng, X.; Liu, Z.-S.; Yang, Y.; Lei, J.-C.; Li, Z.-X. Research on Climb-cruise Global Trajectory Optimization for RBCC Hypersonic Vehicle. Missiles Space Veh. 2018, 47, 1–8. (In Chinese) [Google Scholar]
- Speed of Sound. Available online: https://www.grc.nasa.gov/www/k-12/airplane/sound.html (accessed on 13 May 2021).
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. Rech. Aerosp. 1994, 1, 5–21. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Jameson, A.; Schmidt, W.; Turkel, E. Numerical solution of the Euler equations by finite volume methods using Runge Kutta time stepping schemes. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23–25 June 1981; p. 1259. [Google Scholar]
- Liepmann, H.W.; Bryson, A.E. Transonic Flow Past Wedge Sections. J. Aeronaut. Sci. 1950, 17, 745–755. [Google Scholar] [CrossRef]
- Matin, R.K.; Ghassemi, H.; Arzideh, M.H. Numerical Study of the Effect of Geometrical Changes on the Airfoil Aerodynamic Performance. Int. J. Fluid Mech. Res. 2016, 43, 28–38. [Google Scholar] [CrossRef]
- Chorin, A.J. Numerical solution of the Navier-Stokes equations. Math. Comput. 1968, 22, 745. [Google Scholar] [CrossRef]
- Barth, T.; Jespersen, D. The design and application of upwind schemes on unstructured meshes. In Proceedings of the 27th Aerospace scIences Meeting, Reno, NV, USA, 9–12 January 1989; p. 366. [Google Scholar]
- Stephen, E.; Dunagan, J.L.; John, B.; Miles, B. Interferometric Data for a Shock wave/Boundary-Layer Interaction. In NASA Technical Memorandum 88227; NASA Ames Research Center: Moffett Field, CA, USA, 1986. [Google Scholar]
- Delery, J.; Coet, M.C. Experiments on Shock-Wave/Boundary-Layer Interactions Produced by Two-Dimensional Ramps and Three-Dimensional Obstacles. In Hypersonic Flows for Reentry Problems Désidéri; Glowinski, J.A., Périaux, R.J., Eds.; Springer: Berlin/Heidelberg, Germany, 1990. [Google Scholar]
- Weiss, J.M.; Smith, W.A. Preconditioning applied to variable and constant density flows. AIAA J. 1995, 33, 2050–2057. [Google Scholar] [CrossRef]
- Roe, P.L. Characteristic-Based Schemes for the Euler Equations. Annu. Rev. Fluid Mech. 1986, 18, 337–365. [Google Scholar] [CrossRef]
- Chima, R.; Liou, M.-S. Comparison of the AUSM+ and H-CUSP Schemes for Turbomachinery Applications. In NASA Technical Memorandum 212457; NASA Glenn Research Center: Cleveland, OH, USA, 2003. [Google Scholar]
- Kussoy, M.I.; Horstman, C.C. Documentation of Two-and Three-Dimensional Hypersonic Shock Wave/Turbulent Boundary Layer Interaction Flows. In NASA Technical Memorandum 101075; NASA Ames Research Center: Moffett Field, CA, USA, 1989. [Google Scholar]
- Earl, T. Thermal Structures for Aerospace Applications; AIAA Press: Reston, VA, USA, 1996; p. 5. [Google Scholar]
- Wu, D.F.; Shang, L.; Pu, Y.; Wang, H.T.; Gao, Z.T. Experimental research of thermal-insulation performance of lightweight thermal protection materials for hypersonic aircraft in oxidation environment up to 1700 °C. Spacecr. Environ. Eng. 2016, 33, 7–12. [Google Scholar]
- Wu, D.F.; Lin, L.J.; Wu, W.J.; Sun, C.C. Experimental research on thermal/vibration test of lightweight insulation material for hypersonic vehicle under extreme-high-temperature environment up to 1500 °C. Acta Aeronaut. Astronaut. Sin. 2020, 41, 216–225. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Computational Domains | x/c (m, cp, Temperature and Error Ratio) | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 | |||||||||||||
| 6 | 0.3745 | 0.6719 | 308.5 | 0.59013 | 0.4052 | 290.7 | 0.63756 | 0.3451 | 290.1 | 0.67321 | 0.2939 | 284.4 | 0.71826 | 0.2351 | 286.7 | 0.8773 | 0.00459 | 287.7 |
| 15.49% | 12.54 | / | 14.25% | 13.09% | / | 13.52% | 11.68% | / | 13.29% | 11.95% | / | 13.8% | 12.13% | / | 10.49% | 10.4% | / | |
| 8 | 0.3793 | 0.6819 | 321.5 | 0.59774 | 0.4112 | 302.7 | 0.64396 | 0.3497 | 302.8 | 0.68116 | 0.2971 | 300.7 | 0.72441 | 0.239 | 301.8 | 0.886 | 0.00465 | 302.1 |
| 14.41 | 11.24 | / | 13.15% | 11.81% | / | 12.65% | 10.5% | / | 12.26% | 10.99% | / | 13.06% | 10.67% | / | 9.58% | 9.23% | / | |
| 12 | 0.3779 | 0.6769 | 329.2 | 0.59644 | 0.4097 | 311.3 | 0.64085 | 0.3477 | 309.1 | 0.67843 | 0.2964 | 310.2 | 0.7211 | 0.2371 | 310.2 | 0.882 | 0.00463 | 311.2 |
| 14.72 | 11.89 | / | 13.34% | 12.13% | / | 13.07% | 11.01% | / | 12.62% | 11.2% | / | 13.46% | 11.38% | / | 10.02% | 9.62% | / | |
| Mesh (Cells) | x/c (m, cp, Temperature and Error Ratio) | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 | |||||||||||||
| 210,000 | 0.3793 | 0.6819 | 321.5 | 0.59774 | 0.4112 | 302.7 | 0.64396 | 0.3497 | 302.8 | 0.68116 | 0.2971 | 300.7 | 0.72441 | 0.239 | 301.8 | 0.886 | 0.00465 | 302.1 |
| 14.41% | 11.24% | / | 13.15% | 11.8% | / | 12.65% | 10.5% | / | 12.26% | 10.99% | / | 13.06% | 10.67% | / | 9.58% | 9.23% | / | |
| 480,000 | 0.4025 | 0.7032 | 330.9 | 0.62447 | 0.4262 | 312.3 | 0.67889 | 0.3636 | 312.3 | 0.71274 | 0.3091 | 310.6 | 0.75994 | 0.2481 | 310.9 | 0.915 | 0.00481 | 311.7 |
| 9.17% | 8.46% | / | 9.26% | 8.59% | / | 7.91% | 6.95% | / | 8.2% | 7.39% | / | 8.79% | 7.27% | / | 6.7% | 6.10% | / | |
| 680,000 | 0.3978 | 0.6919 | 331.2 | 0.62047 | 0.4198 | 312.7 | 0.66488 | 0.3591 | 313.1 | 0.70963 | 0.3041 | 308.2 | 0.743 | 0.2438 | 310.2 | 0.901 | 0.00475 | 312.5 |
| 10.23% | 9.93% | / | 9.84% | 9.96% | / | 9.81% | 8.1% | / | 8.60% | 8.89% | / | 10.78% | 8.87% | / | 8.06% | 7.27% | / | |
| Validation Parameters | ||
|---|---|---|
| Solver | Pressure-based with coupled algorithm | Pressure-based with coupled algorithm |
| Turbulence Models | SST k-omega | Spalart-Allmaras |
| Materials | Density: Ideal-gas | Density: Ideal-gas |
| Viscosity: 1.7894 × 10−5 Pa·s | Viscosity: 1.7894 × 10−5 Pa·s | |
| Cp (j/kg-k): 1006.43 | Cp (j/kg-k): 1006.43 | |
| Initial conditions | Mach number: 0.768/0.817/0.86 | Mach number: 0.768/0.817/0.86 |
| Static temperature: 300 K | Static temperature: 300 K | |
| Boundary conditions | INPUT: pressure far field | INPUT: pressure far field |
| FARFIELD: pressure far field | FARFIELD: pressure far field | |
| OUTPUT: pressure outlet | OUTPUT: pressure outlet | |
| SYMMETRY: symmetry | SYMMETRY: symmetry | |
| WALL: no-slip, isothermal | WALL: no-slip, isothermal |
| Computational Domain | x (m) (p/pt, Temperature and Error Ratio) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.02 | 0.04 | 0.06 | 0.08 | ||||||
| 6c | 0.0873 | 241.887 | 0.1088 | 239.475 | 0.1372 | 242.097 | 0.0451 | 242.643 | 0.0348 | 243.842 |
| 10.33% | / | 10.78% | / | 9.68% | / | 12.1% | / | 11.26% | / | |
| 8c | 0.0861 | 252.149 | 0.1103 | 252.941 | 0.1396 | 253.461 | 0.0443 | 254.013 | 0.0353 | 254.314 |
| 8.81% | / | 9.55% | / | 8.1% | / | 10.11% | / | 9.98% | / | |
| 12c | 0.0868 | 259.411 | 0.1098 | 258.115 | 0.1389 | 257.329 | 0.0446 | 259.227 | 0.0351 | 257.669 |
| 9.7% | / | 9.96% | / | 8.56% | / | 10.86% | / | 10.49% | / | |
| Mesh (Cells) | x (m) (p/pt, Temperature and Error Ratio) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.02 | 0.04 | 0.06 | 0.08 | ||||||
| 270,000 | 0.0861 | 252.149 | 0.1103 | 252.941 | 0.1396 | 253.461 | 0.0443 | 254.013 | 0.0353 | 254.314 |
| 8.81% | / | 9.55% | / | 8.10% | / | 10.11% | / | 9.98% | / | |
| 520,000 | 0.0850 | 262.052 | 0.1118 | 262.631 | 0.1412 | 263.803 | 0.0439 | 264.211 | 0.0358 | 264.702 |
| 7.44% | / | 8.28% | / | 7.08% | / | 9.33% | / | 8.83% | / | |
| 720,000 | 0.0853 | 264.043 | 0.1117 | 260.574 | 0.1405 | 264.887 | 0.0441 | 262.059 | 0.0356 | 265.413 |
| 7.80% | / | 8.40% | / | 7.51% | / | 9.61% | / | 9.22% | / | |
| Validation Parameters | ||
|---|---|---|
| Solver | Pressure-based with coupled algorithm | Pressure-based with coupled algorithm |
| Models | SST k-omega | Spalart-Allmaras |
| Materials | Density: Ideal-gas | Density: Ideal-gas |
| Viscosity: Sutherland law | Viscosity: Sutherland law | |
| Cp (j/kg-k): 1006.43 | Cp (j/kg-k): 1006.43 | |
| Initial conditions | Mach number: 2.85 | Mach number: 2.85 |
| Static pressure: 5881 Pa | Static pressure: 5881 Pa | |
| Static Temperature: 102.88 K | Static Temperature: 102.88 K | |
| Boundary conditions | INPUT: pressure far field | INPUT: pressure far field |
| FARFIELD: pressure far field | FARFIELD: pressure far field | |
| OUTPUT: pressure outlet | OUTPUT: pressure outlet | |
| WALL: no-slip, isothermal, 300 K | WALL: no-slip, isothermal, 300 K |
| Computational Domains | x/L (cp, st and Error Ratio) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.1 | 1.15 | 1.175 | 1.19 | 1.21 | 1.23 | |||||||
| 6c | 0.2193 | 0.001419 | 0.2286 | 0.001370 | 0.2201 | 0.001338 | 0.2216 | 0.001279 | 0.2230 | 0.001247 | 0.2229 | 0.001233 |
| 5.96% | 6.75% | 7.10% | 8.30% | 9.01% | 10.03% | 13.75% | 14.23% | 15.03% | 15.99% | 15.07% | 16.34% | |
| 8c | 0.2173 | 0.001437 | 0.2261 | 0.001386 | 0.2226 | 0.001352 | 0.2246 | 0.001295 | 0.2254 | 0.001259 | 0.2253 | 0.001248 |
| 4.99% | 5.56% | 5.93% | 7.23% | 7.98% | 9.09% | 12.58% | 13.15% | 14.12% | 15.18% | 14.16% | 15.32% | |
| 12c | 0.2178 | 0.001431 | 0.2266 | 0.001381 | 0.2221 | 0.001347 | 0.2244 | 0.001290 | 0.2248 | 0.001255 | 0.2245 | 0.001245 |
| 5.24% | 5.96% | 6.17% | 7.56% | 8.18% | 9.43% | 12.66% | 13.49% | 14.35% | 15.54% | 14.46% | 15.53% | |
| Mesh (Cells) | x/L (cp, st and Error Ratio) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.1 | 1.15 | 1.175 | 1.19 | 1.21 | 1.23 | |||||||
| 280,000 | 0.2173 | 0.001437 | 0.2261 | 0.001386 | 0.2226 | 0.001352 | 0.2246 | 0.001295 | 0.2254 | 0.001259 | 0.2253 | 0.001248 |
| 4.99% | 5.56% | 5.93% | 7.23% | 7.98% | 9.09% | 12.58% | 13.15% | 14.12% | 15.18% | 14.16% | 15.32% | |
| 540,000 | 0.2151 | 0.001453 | 0.2243 | 0.001401 | 0.2251 | 0.001372 | 0.2275 | 0.001313 | 0.2280 | 0.001277 | 0.2279 | 0.001277 |
| 3.94% | 4.51% | 5.80% | 6.22% | 6.95% | 7.74% | 11.45% | 11.95% | 13.11% | 13.96% | 13.13% | 14.17% | |
| 740,000 | 0.2154 | 0.001448 | 0.2242 | 0.001406 | 0.2253 | 0.001368 | 0.2277 | 0.001315 | 0.2276 | 0.001274 | 0.2277 | 0.001263 |
| 4.08% | 4.84% | 5.04% | 5.89% | 6.86% | 8.01% | 11.37% | 11.81% | 13.28% | 14.17% | 13.24% | 14.31% | |
| Validation Parameters | ||
|---|---|---|
| Solver | Density-based | Density-based |
| Flux: AUSM+/ROE | Flux: AUSM+/ROE | |
| Models | SST k-omega | Spalart-Allmaras |
| Materials | Density: Ideal-gas | Density: Ideal-gas |
| Viscosity: Sutherland law | Viscosity: Sutherland law | |
| Cp (j/kg-k): 1006.43 | Cp (j/kg-k): 1006.43 | |
| Initial conditions | Mach number: 5 | Mach number: 5 |
| Static pressure: 850.5173 Pa | Static pressure: 850.5173 Pa | |
| Static Temperature: 79.17 K | Static Temperature: 79.17 K | |
| Boundary conditions | INPUT: pressure far field | INPUT: pressure far field |
| FARFIELD: pressure far field | FARFIELD: pressure far field | |
| OUTPUT: pressure outlet | OUTPUT: pressure outlet | |
| WALL: no-slip, isothermal, 100 K/290 K | WALL: no-slip, isothermal, 100 K/290 K |
| Computational Domains | y (cm) (U/UINF, Pressure and Error Ratio) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.2 | 0.5 | 0.8 | 1.1 | 1.4 | 1.6 | |||||||
| 6c | 3.6211 | 6579.27 | 2.9443 | 6561.08 | 2.9117 | 6664.32 | 3.0921 | 6759.12 | 3.0671 | 6879.28 | 3.1098 | 6902.17 |
| 3.79% | 7.40% | 7.82% | 7.65% | 3.87% | 6.20% | 8.92% | 4.87% | 8.03% | 3.18% | 7.79% | 2.85% | |
| 8c | 3.5731 | 6648.16 | 2.9733 | 6629.71 | 2.9434 | 6731.84 | 3.0552 | 6849.32 | 3.0363 | 6975.39 | 3.0731 | 6989.37 |
| 2.41% | 6.43% | 6.91% | 6.69% | 2.83% | 5.25% | 7.62% | 3.60% | 6.95% | 1.82% | 6.52% | 1.63% | |
| 12c | 3.5892 | 6627.39 | 2.9628 | 6621.96 | 2.9274 | 6719.34 | 3.0729 | 6823.07 | 3.0541 | 6941.97 | 3.0913 | 6959.97 |
| 2.87% | 6.72% | 7.24% | 6.80% | 3.35% | 5.43% | 8.24% | 3.97% | 7.58% | 2.29% | 7.15% | 2.04% | |
| Mesh (Cells) | y (cm) (U/UINF, Pressure and Error Ratio) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.2 | 0.5 | 0.8 | 1.1 | 1.4 | 1.6 | |||||||
| 460,000 | 3.5731 | 6648.16 | 2.9733 | 6629.71 | 2.9434 | 6731.84 | 3.0552 | 6849.32 | 3.0363 | 6975.39 | 3.0731 | 6989.37 |
| 2.41% | 6.43% | 6.91% | 6.69% | 2.83% | 5.25% | 7.62% | 3.60% | 6.95% | 1.82% | 6.52% | 1.63% | |
| 650,000 | 3.5324 | 6774.72 | 3.0128 | 6755.06 | 2.9840 | 6825.73 | 3.0084 | 6960.94 | 2.9874 | 7066.28 | 3.0342 | 7078.34 |
| 1.24% | 4.65% | 5.67% | 4.92% | 1.49% | 3.93% | 5.97% | 2.03% | 5.23% | 0.54% | 5.17% | 0.37% | |
| 840,000 | 3.5351 | 6772.48 | 3.0131 | 6753.94 | 2.9843 | 6826.77 | 3.0112 | 6958.31 | 2.9946 | 7069.12 | 3.0297 | 7080.42 |
| 1.32% | 4.68% | 5.66% | 4.94% | 1.48% | 3.92% | 6.07% | 2.06% | 5.48% | 0.50% | 5.02% | 0.35% | |
| Validation Parameters | SST k-Omega | Spalart-Allmaras |
|---|---|---|
| Solver | Density-based | Density-based |
| Flux: AUSM+/ROE | Flux: AUSM+/ROE | |
| Materials | Density: Ideal-gas | Density: Ideal-gas |
| Viscosity: Sutherland law | Viscosity: Sutherland law | |
| Cp (j/kg-k): 1006.43 | Cp (j/kg-k): 1006.43 | |
| Initial conditions | Mach number: 7.05 | Mach number: 7.05 |
| Static pressure: 576 Pa | Static pressure: 576 Pa | |
| Static Temperature: 81.2 K | Static Temperature: 81.2 K | |
| Boundary conditions | INPUT: pressure far field | INPUT: pressure far field |
| FARFIELD: pressure far field | FARFIELD: pressure far field | |
| OUTPUT: pressure outlet | OUTPUT: pressure outlet | |
| WALL: no slip, isothermal wall, 311 K | WALL: no slip, isothermal wall, 311 K |
| Phase | Initial Conditions (Altitude, Velocity, Pressure, Temperature, Wall Temperature) | Simulation Parameters |
|---|---|---|
| Ejection phase | = 216.77 K | Transonic stage is 1, turbulence model applying Spalart-Allmaras and pressure-based solver adopting coupled algorithm |
| Ejection phase | result from previous stage | Supersonic stage is 0.8, turbulence model applying SST k-omega and pressure-based solver adopting coupled algorithm |
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| Sub combustion stamping phase | result from previous stage | High supersonic stage is 0.3, cell Reynolds number of 16 and aspect ratio of 200, turbulence model applying SST k-omega and density-based solver adopting AUSM+ flux type |
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| Sub combustion stamping phase | result from previous stage | Hypersonic stage is 0.7, cell Reynolds number of 40 and aspect ratio of 40, turbulence model applying Spalart-Allmaras and density-based solver adopting AUSM+ flux type |
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| Super combustion stamping phase | result from previous stage | Hypersonic stage The same as the above phase |
| result from previous stage | ||
| result from previous stage | ||
| result from previous stage | ||
| Cruising phase | result from previous stage | Hypersonic stage The same as the above phase |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Zhang, G. An Effective Simulation Scheme for Predicting the Aerodynamic Heat of a Scramjet-Propelled Vehicle. Appl. Sci. 2021, 11, 9344. https://doi.org/10.3390/app11199344
Yang L, Zhang G. An Effective Simulation Scheme for Predicting the Aerodynamic Heat of a Scramjet-Propelled Vehicle. Applied Sciences. 2021; 11(19):9344. https://doi.org/10.3390/app11199344
Chicago/Turabian StyleYang, Lu, and Guangming Zhang. 2021. "An Effective Simulation Scheme for Predicting the Aerodynamic Heat of a Scramjet-Propelled Vehicle" Applied Sciences 11, no. 19: 9344. https://doi.org/10.3390/app11199344