Flatness-Based Aggressive Formation Tracking Control of Quadrotors with Finite-Time Estimated Feedforwards



Abstract
:1. Introduction
2. Preliminaries
2.1. Graph Theory
2.2. Interaction Matrix
3. Aggressive Control of Quadrotors with Extended Finite-Time Observer
3.1. Quadrotor Model
3.2. Nonlinear-Flatness Based Decoupling Control
3.3. Extended Finite-Time Observer
4. Formation Controller Design
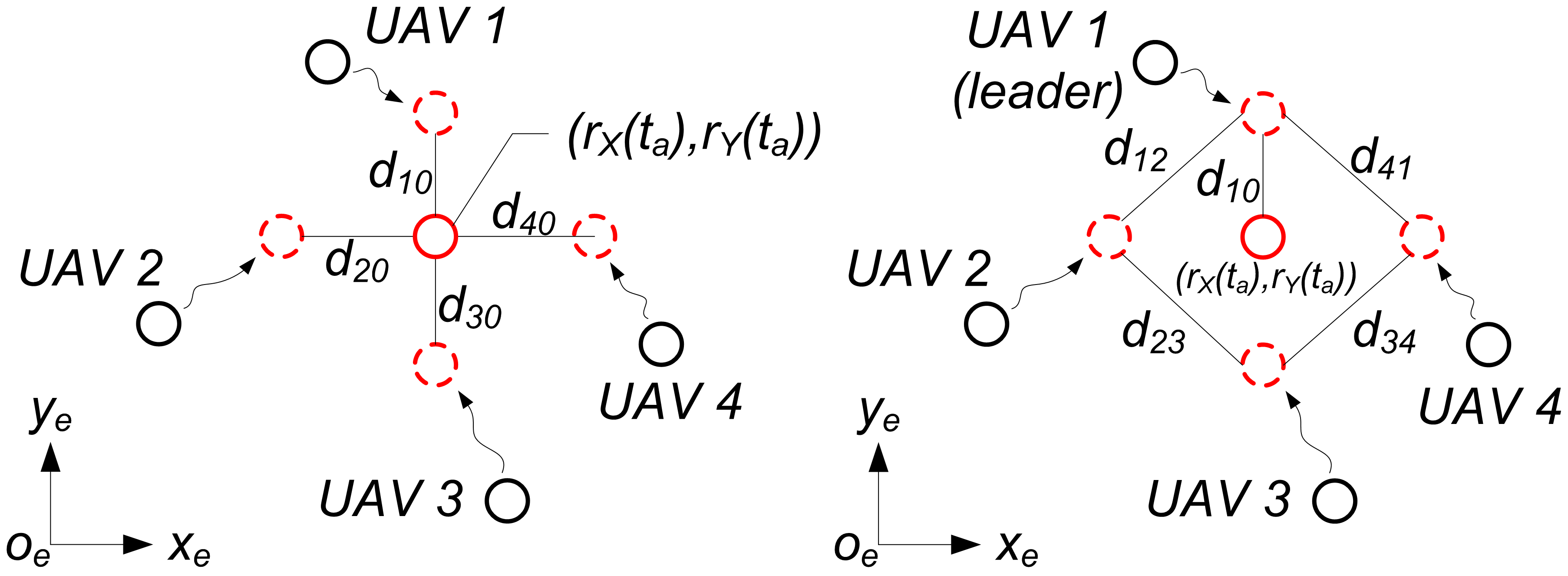
4.1. Available Guidance Vector
4.2. Convergence Analysis
- When , it is trivial to prove that is bounded, since .
- When , , the saturations are removed, such that , where , its norm is . According to theorem 1, when . Then, we conclude that .
5. Simulation and Experimental Results
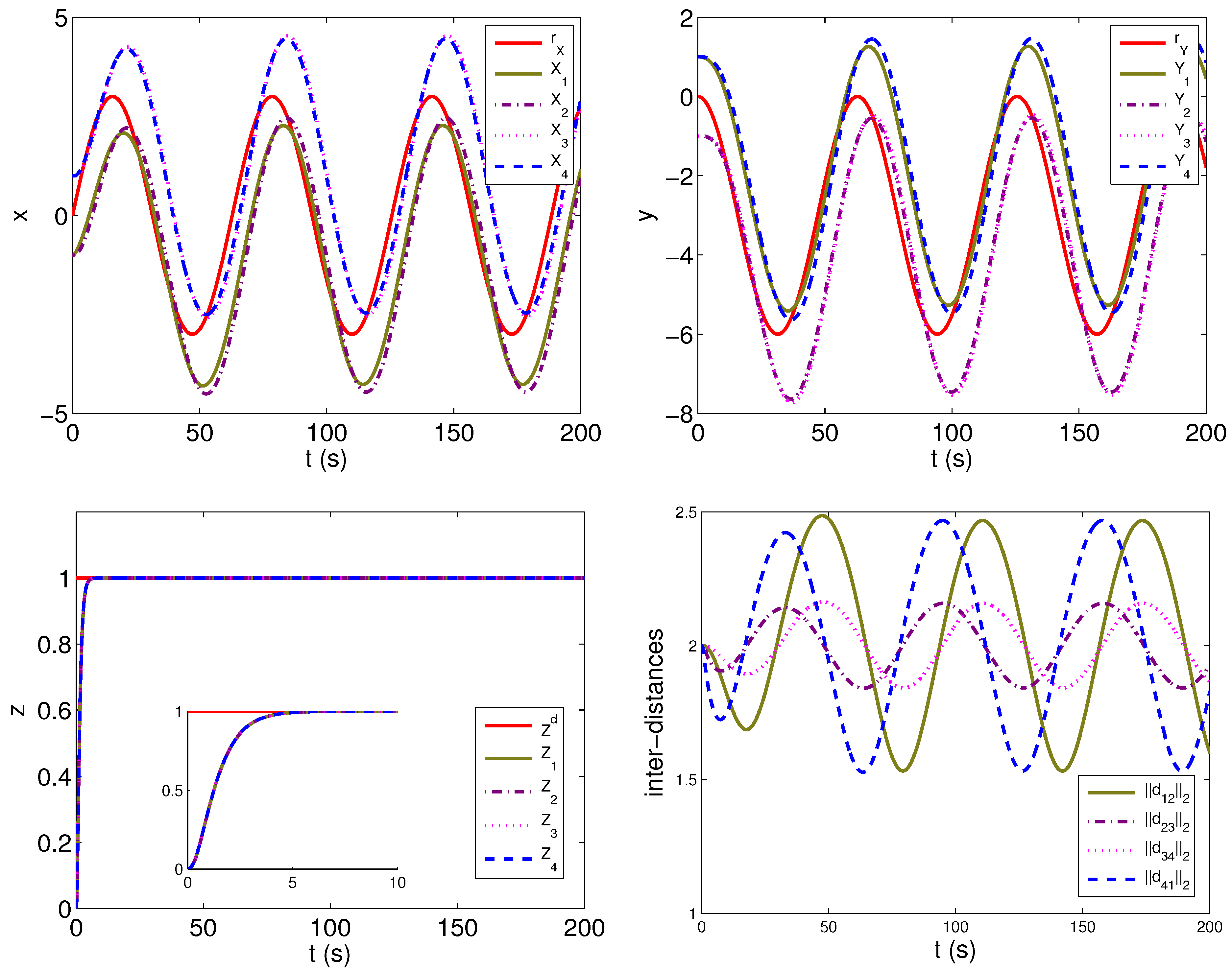
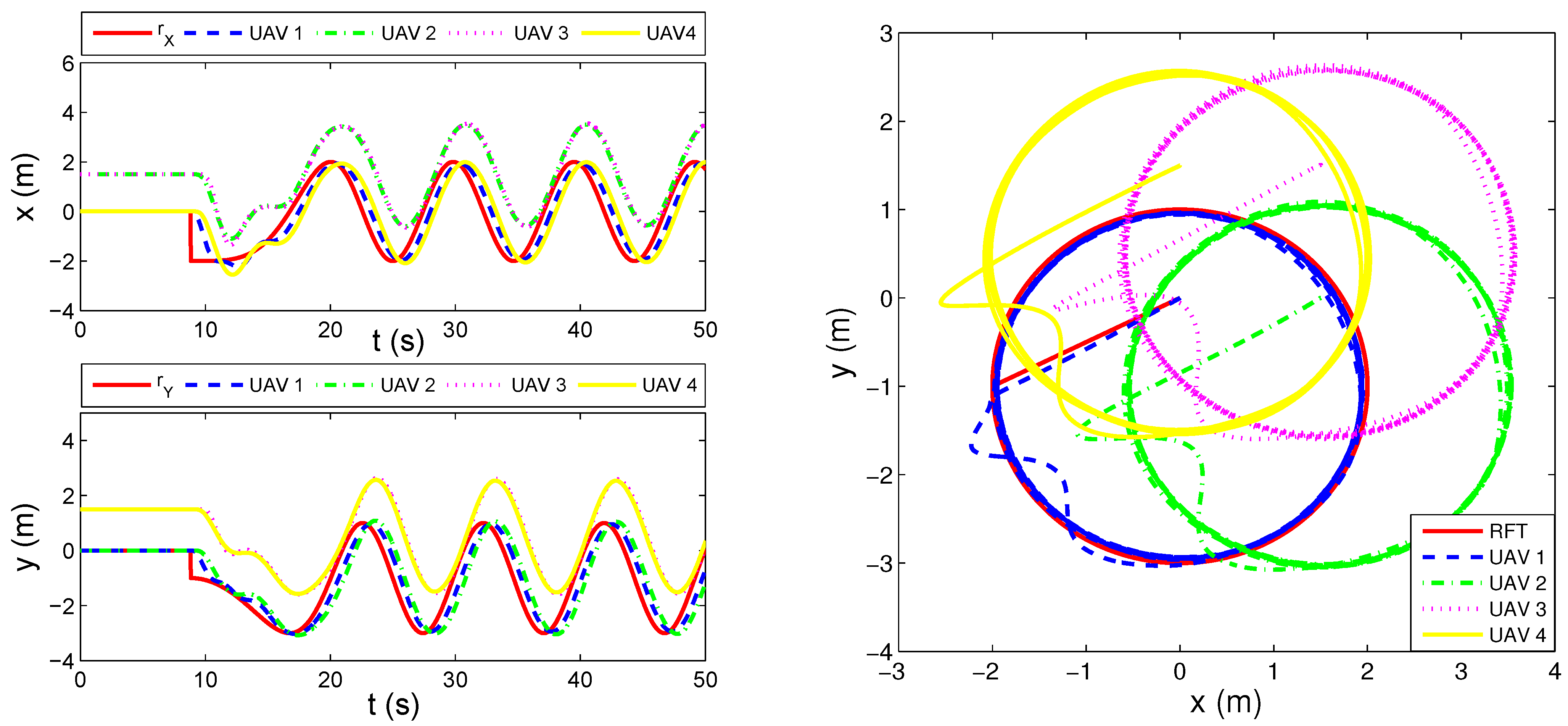
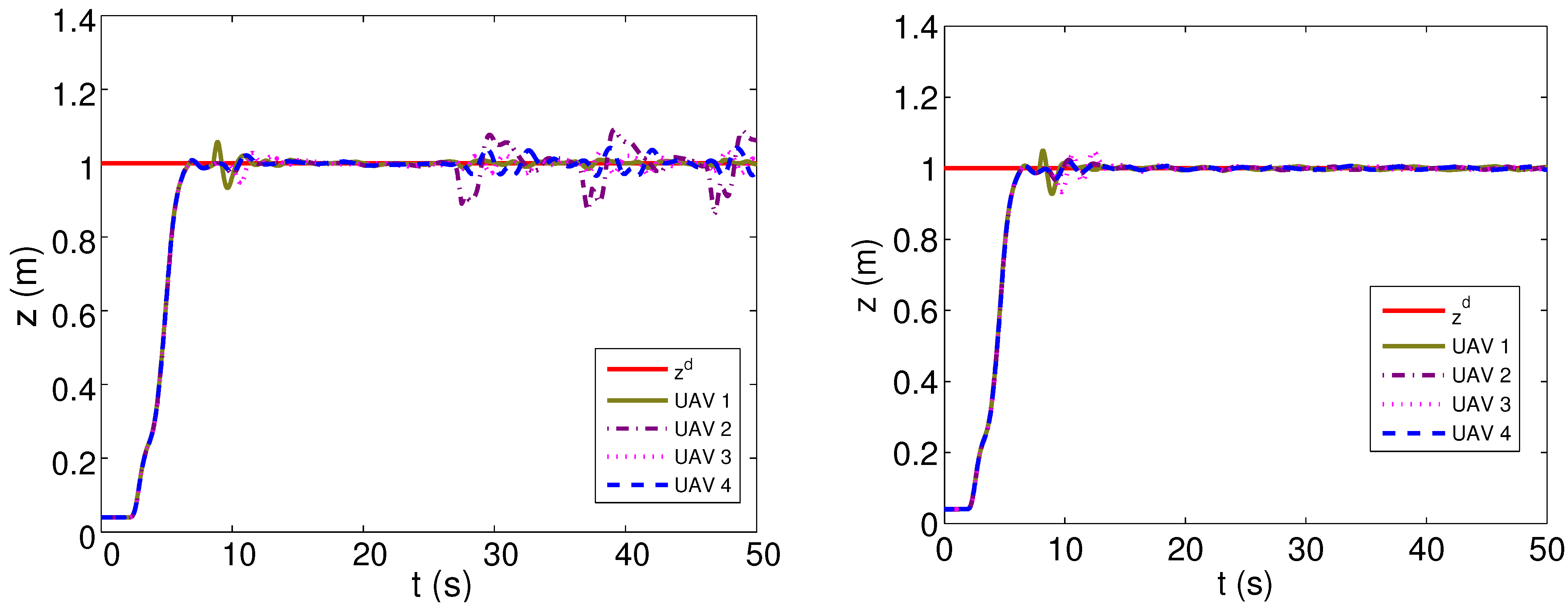
5.1. Simulation Results
- Controller gains tuning on simulator: Let , , , , and , , , be null. Give some small and , for example a small step signal, then, tune the gains and , . Observe the oscillation of the rotation angles during translational motion, adjust the gains , and , to reduce the oscillation.
- Implement the controller gains on real quadrotor: Test on single quadrotor, slightly tune the parameters , if necessary. Then, if the performance is satisfied, implement them on the formation tracking control.
- Pole assignment: The gains of the observer are dominated by the finite time that we want to have. Once it is fixed, the gains of the observer can be calculated by the technique of pole assignment, such that the nearest pole of to imaginary axis is placed to .
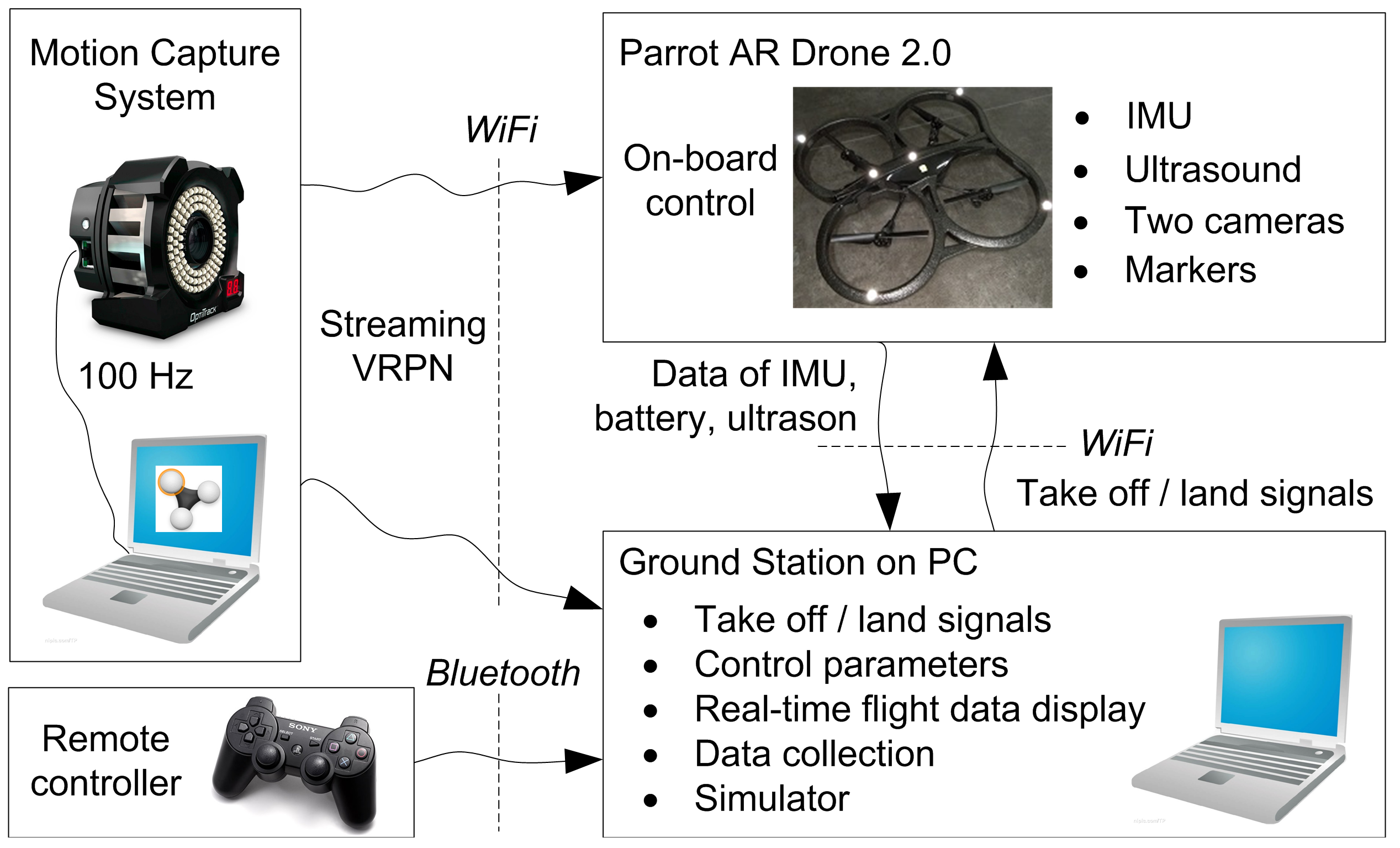
5.2. Experimental Setup
- Program the algorithms by using C++.
- Compile the program into executable files for the quadrotors in the simulator and for the real quadrotors.
- Test the algorithm in the simulator, adjust the parameters of the controller.
- Send the executable file to each quadrotor.
- Carry out the real-time experiment.
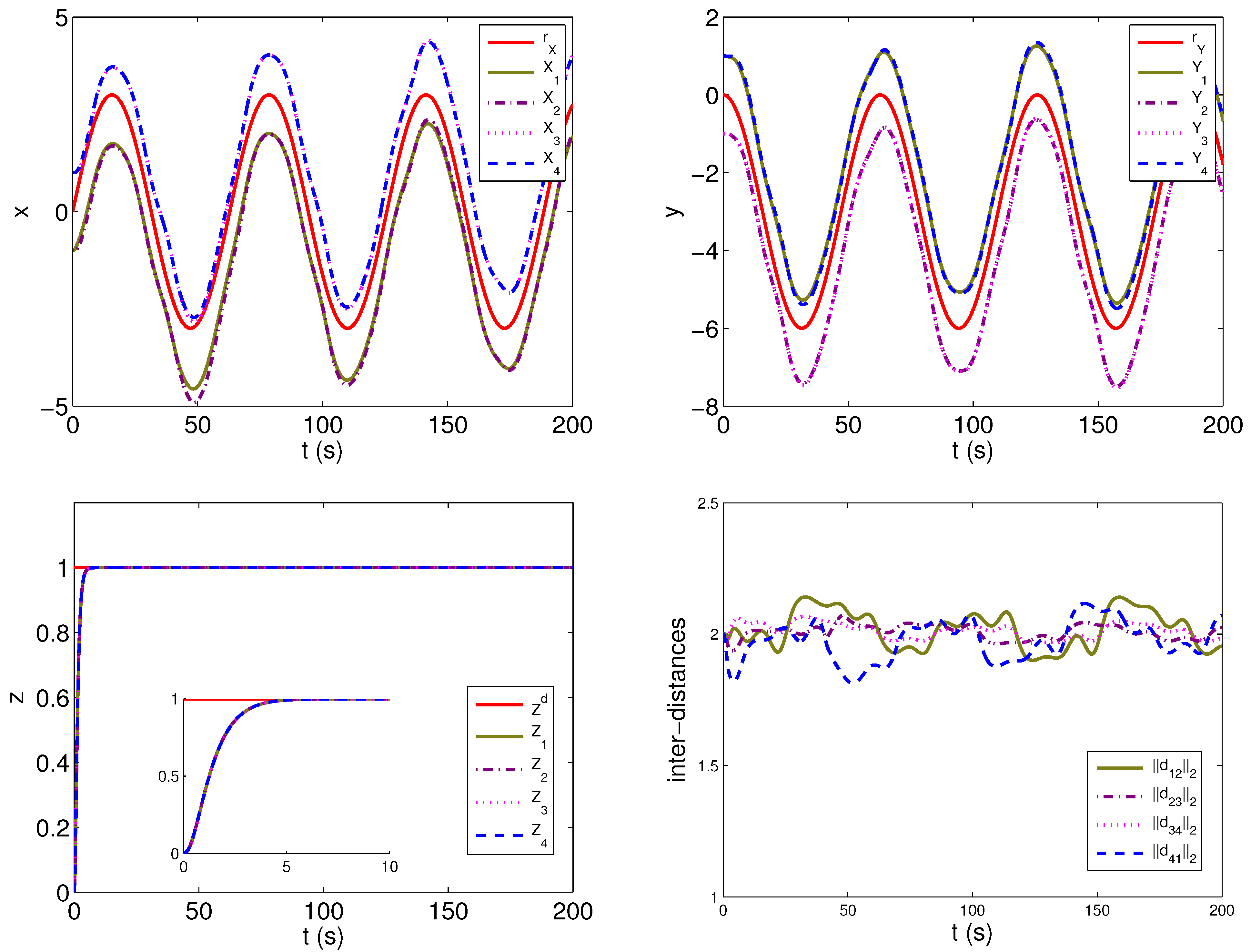
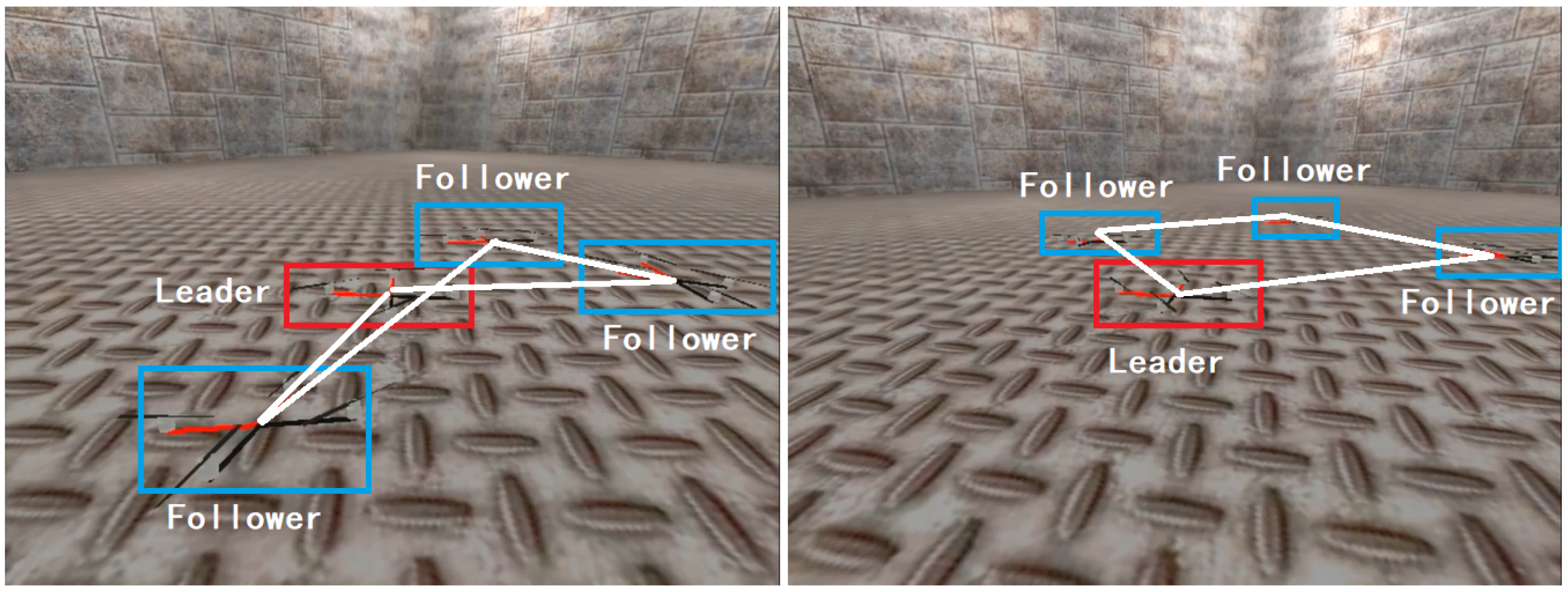
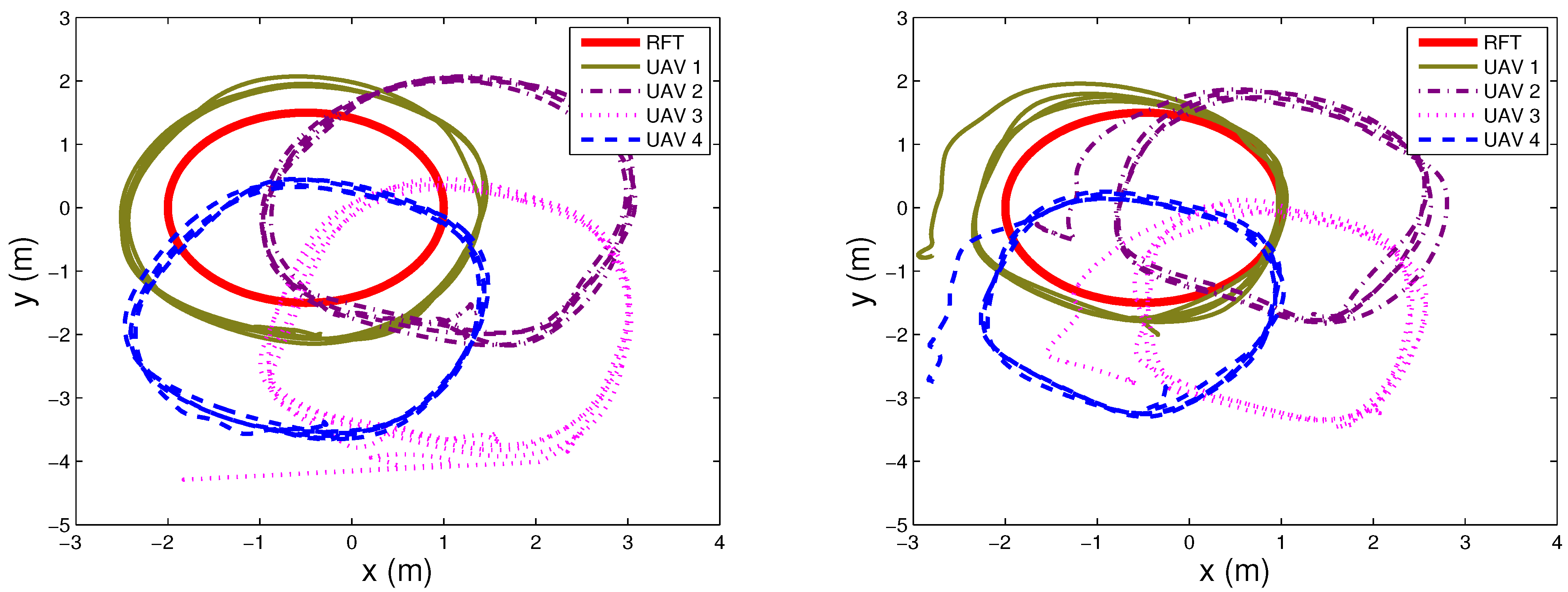
5.3. Real-Time Experiments on Simulator-Experiment Platform
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Proof of Proposition 3
Appendix A.2. Model Simplification
References
- Liu, H.; Ma, T.; Lewis, F.L.; Wan, Y. Robust Formation Control for Multiple Quadrotors with Nonlinearities and Disturbances. IEEE Trans. Cybern. 2020, 50, 1362–1371. [Google Scholar] [CrossRef] [PubMed]
- Villa, D.K.D.; Brandão, A.S.; Sarcinelli-Filho, M. Path-Following and Attitude Control of a Payload Using Multiple Quadrotors. In Proceedings of the 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, 2–6 December 2019; pp. 535–540. [Google Scholar] [CrossRef]
- Wang, Z.; Singh, S.; Pavone, M.; Schwager, M. Cooperative Object Transport in 3D with Multiple Quadrotors Using No Peer Communication. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1064–1071. [Google Scholar] [CrossRef]
- Villa, D.K.D.; Brandão, A.S.; Sarcinelli-Filho, M. Rod-shaped payload transportation using multiple quadrotors. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1036–1040. [Google Scholar] [CrossRef]
- Kushleyev, A.; Kumar, V.; Mellinger, D. Towards a Swarm of Agile Micro Quadrotors. In Proceedings of the Robotics: Science and Systems, Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Sreenath, K.; Kumar, V. Dynamics, Control and Planning for Cooperative Manipulation of Payloads Suspended by Cables from Multiple Quadrotor Robots. In Proceedings of the Robotics: Science and Systems, Berlin, Germany, 24–28 June 2013. [Google Scholar]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An Overview of Recent Progress in the Study of Distributed Multi-Agent Coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef] [Green Version]
- Shao, X.; Tian, B.; Li, D. Neural Dynamic Surface Containment Control for Multiple Quadrotors. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 373–378. [Google Scholar] [CrossRef]
- Katt, C.; Castaneda, H. Containment Control Based on Adaptive Sliding Mode for a MAV Swarm System under perturbation. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 270–275. [Google Scholar] [CrossRef]
- Meng, Z.; Ren, W.; You, Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica 2010, 46, 2092–2099. [Google Scholar] [CrossRef]
- Roldao, V.; Cunha, R.; Cabecinhas, D.; Silvestre, C.; Oliveira, P. A leader-following trajectory generator with application to quadrotor formation flight. Robot. Auton. Syst. 2014, 62, 1597–1609. [Google Scholar] [CrossRef]
- Mercado, D.A.; Castro, R.; Lozano, R. Quadrotors flight formation control using a leader-follower approach. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 3858–3863. [Google Scholar] [CrossRef]
- Hou, Z.; Fantoni, I. Interactive Leader Follower Consensus of Multiple Quadrotors Based on Composite Nonlinear Feedback Control. IEEE Trans. Control Syst. Technol. 2018, 26, 1732–1743. [Google Scholar] [CrossRef] [Green Version]
- Saber, R.; Murray, R. Flocking with obstacle avoidance: Cooperation with limited communication in mobile networks. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; Volume 2, pp. 2022–2028. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.; Murray, R. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Turpin, M.; Michael, N.; Kumar, V. Trajectory design and control for aggressive formation flight with quadrotors. Auton. Robots 2012, 33, 143–156. [Google Scholar] [CrossRef]
- Zhao, D.; Krishnamurthi, J.; Gandhi, F.; Mishra, S. Differential flatness based trajectory generation for time-optimal helicopter shipboard landing. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 2243–2250. [Google Scholar] [CrossRef]
- Son, C.Y.; Jang, D.; Seo, H.; Kim, T.; Lee, H.; Kim, H.J. Real-time Optimal Planning and Model Predictive Control of a Multi-rotor with a Suspended Load. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5665–5671. [Google Scholar] [CrossRef]
- Zeng, J.; Kotaru, P.; Mueller, M.W.; Sreenath, K. Differential Flatness Based Path Planning with Direct Collocation on Hybrid Modes for a Quadrotor With a Cable-Suspended Payload. IEEE Robot. Autom. Lett. 2020, 5, 3074–3081. [Google Scholar] [CrossRef]
- Hou, Z.; Xu, J.; Zhang, G. Interaction Matrix Based Analysis and Asymptotic Cooperative Control of Multi-agent Systems. Int. J. Control Autom. Syst. 2020, 18, 1103–1115. [Google Scholar] [CrossRef]
- Irofti, D. An anticipatory protocol to reach fast consensus in multi-agent systems. Automatica 2020, 113, 108776. [Google Scholar] [CrossRef]
- Liu, H.; Tian, Y.; Lewis, F.L.; Wan, Y.; Valavanis, K.P. Robust formation tracking control for multiple quadrotors under aggressive maneuvers. Automatica 2019, 105, 179–185. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Wang, D.; Shi, G.; Liu, D.; Li, Y. Decentralized Control for Large-Scale Nonlinear Systems with Unknown Mismatched Interconnections via Policy Iteration. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1725–1735. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-Time Stability of Continuous Autonomous Systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Fixed inertial frame | |
| Basis vector of inertial frame , , | |
| Coordinates of the center of mass of a quadrotor in | |
| Euler angles (pitch, roll and yaw) | |
| Rotation matrices in yaw, pitch and roll | |
| Rotation matrix | |
| Inertia matrix represented in the body-fixed frame | |
| Angular velocity of the quadrotor i in the body-fixed frame | |
| Operation from vector in to skew-symmetric matrix | |
| The moments of roll, pitch and yaw | |
| Total thrust force of quadrotor i | |
| State of quadrotor i | |
| Control input of the quadrotor i |
| 1.0 | 2.5 | 1.8 | 1.3 | 1.0 | 2.5 | 1.8 | 1.3 | 17.3 | 10.2 | 3.1 | 2.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Z.; Zhang, G.; Yang, W.; Wang, W.; Han, C. Flatness-Based Aggressive Formation Tracking Control of Quadrotors with Finite-Time Estimated Feedforwards. Appl. Sci. 2021, 11, 792. https://doi.org/10.3390/app11020792
Hou Z, Zhang G, Yang W, Wang W, Han C. Flatness-Based Aggressive Formation Tracking Control of Quadrotors with Finite-Time Estimated Feedforwards. Applied Sciences. 2021; 11(2):792. https://doi.org/10.3390/app11020792
Chicago/Turabian StyleHou, Zhicheng, Gong Zhang, Wenlin Yang, Weijun Wang, and Changsoo Han. 2021. "Flatness-Based Aggressive Formation Tracking Control of Quadrotors with Finite-Time Estimated Feedforwards" Applied Sciences 11, no. 2: 792. https://doi.org/10.3390/app11020792
APA StyleHou, Z., Zhang, G., Yang, W., Wang, W., & Han, C. (2021). Flatness-Based Aggressive Formation Tracking Control of Quadrotors with Finite-Time Estimated Feedforwards. Applied Sciences, 11(2), 792. https://doi.org/10.3390/app11020792