
Comparison Analysis on the Accuracy of Galileo PPP Using Different Frequency Combinations in Europe

Abstract
:1. Introduction
2. Methods
3. Experiments and Results
3.1. Processing Strategies
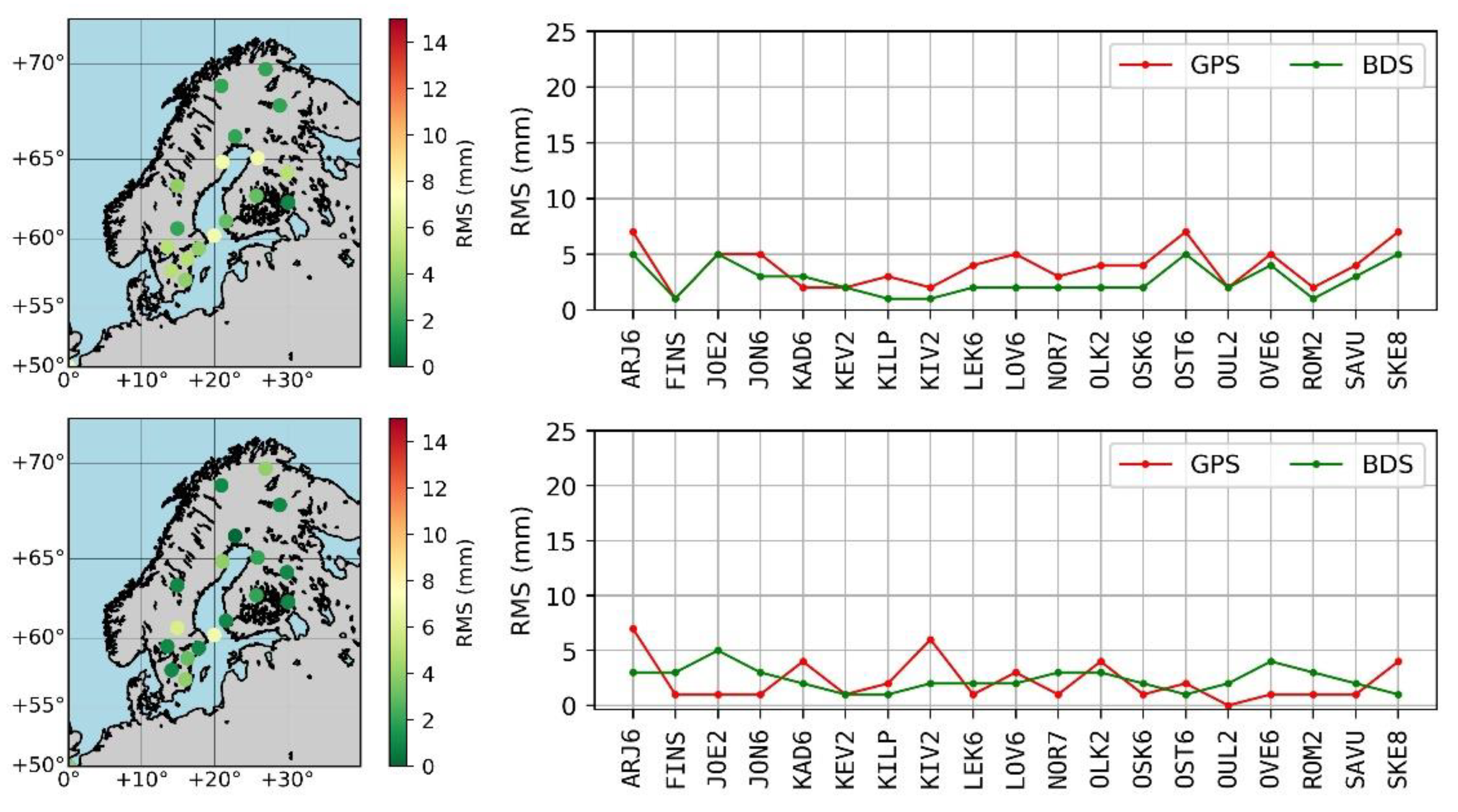
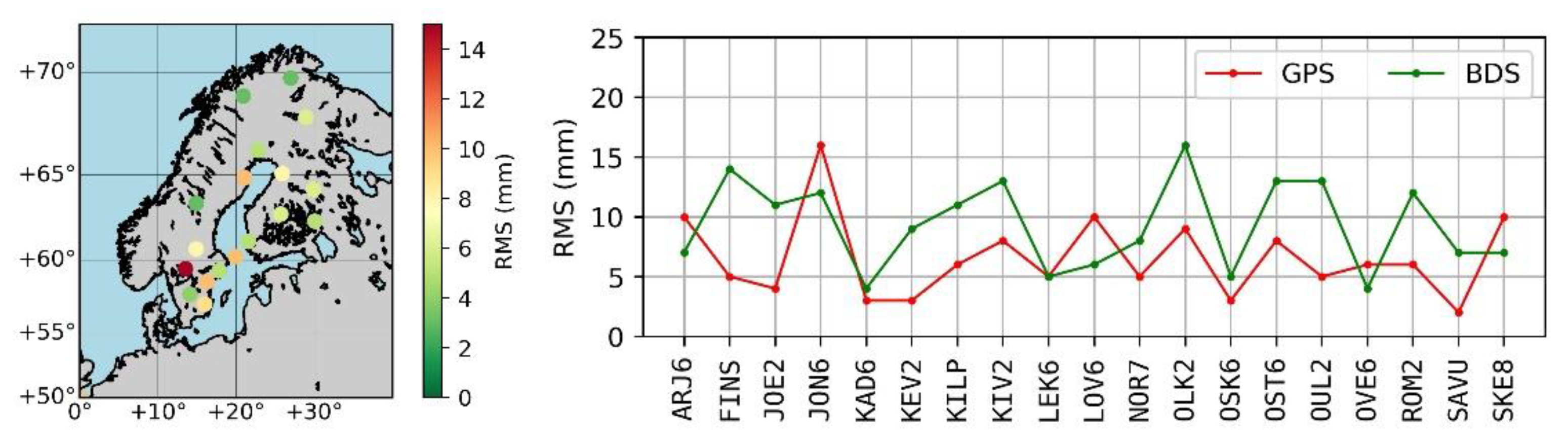
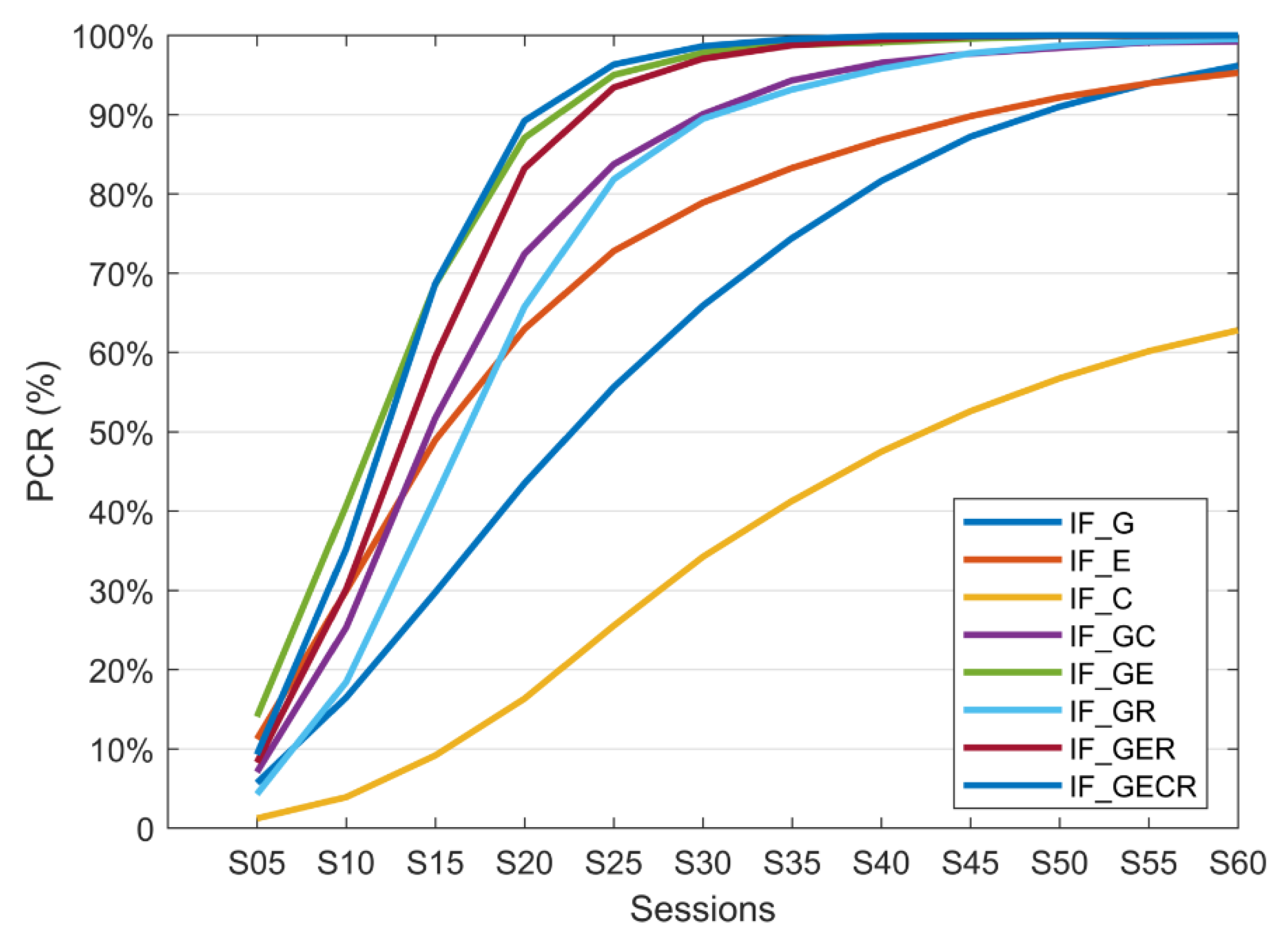
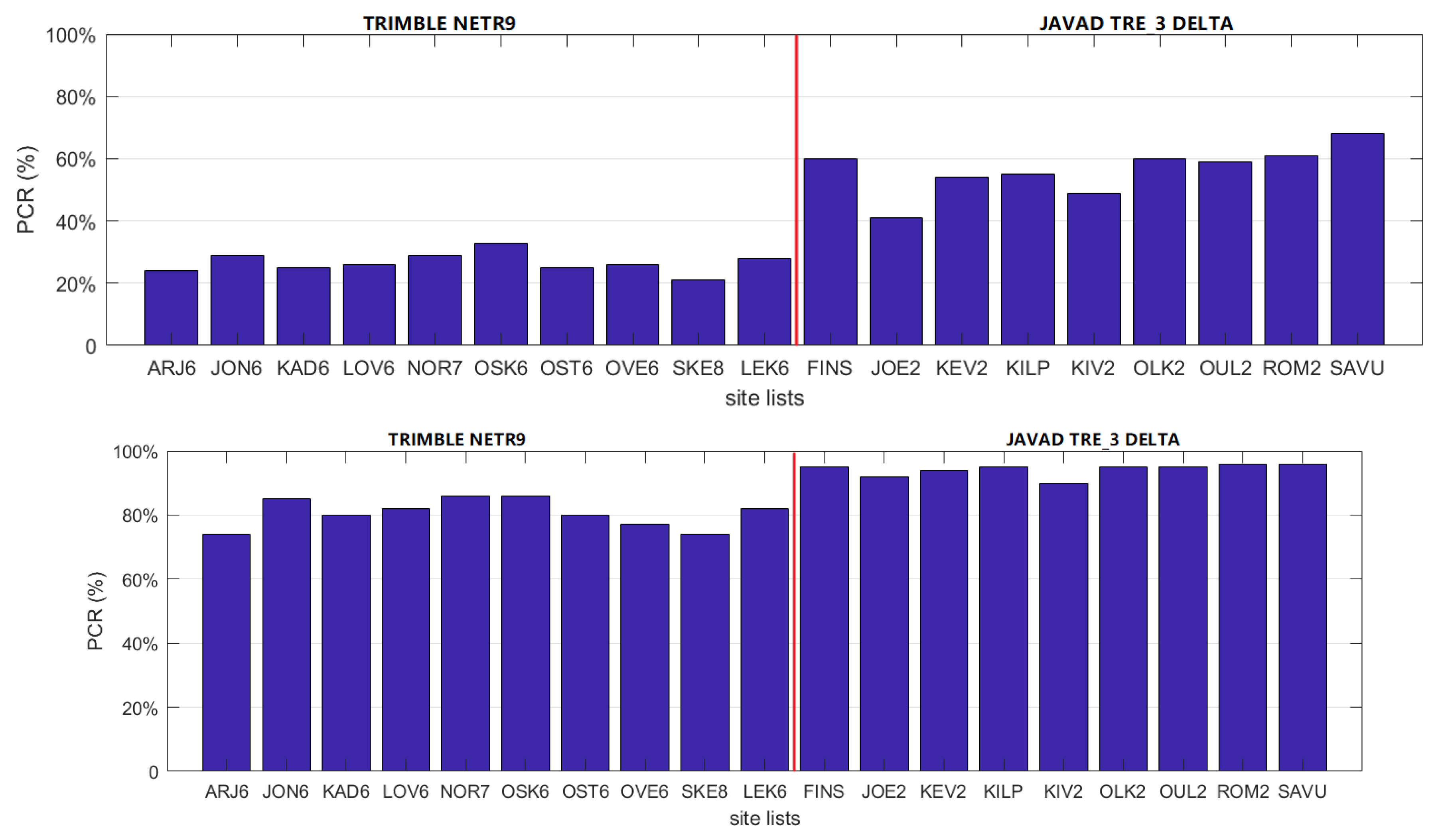
3.2. Evaluation of the Accuracy of Dual-Frequency Galileo Static PPP
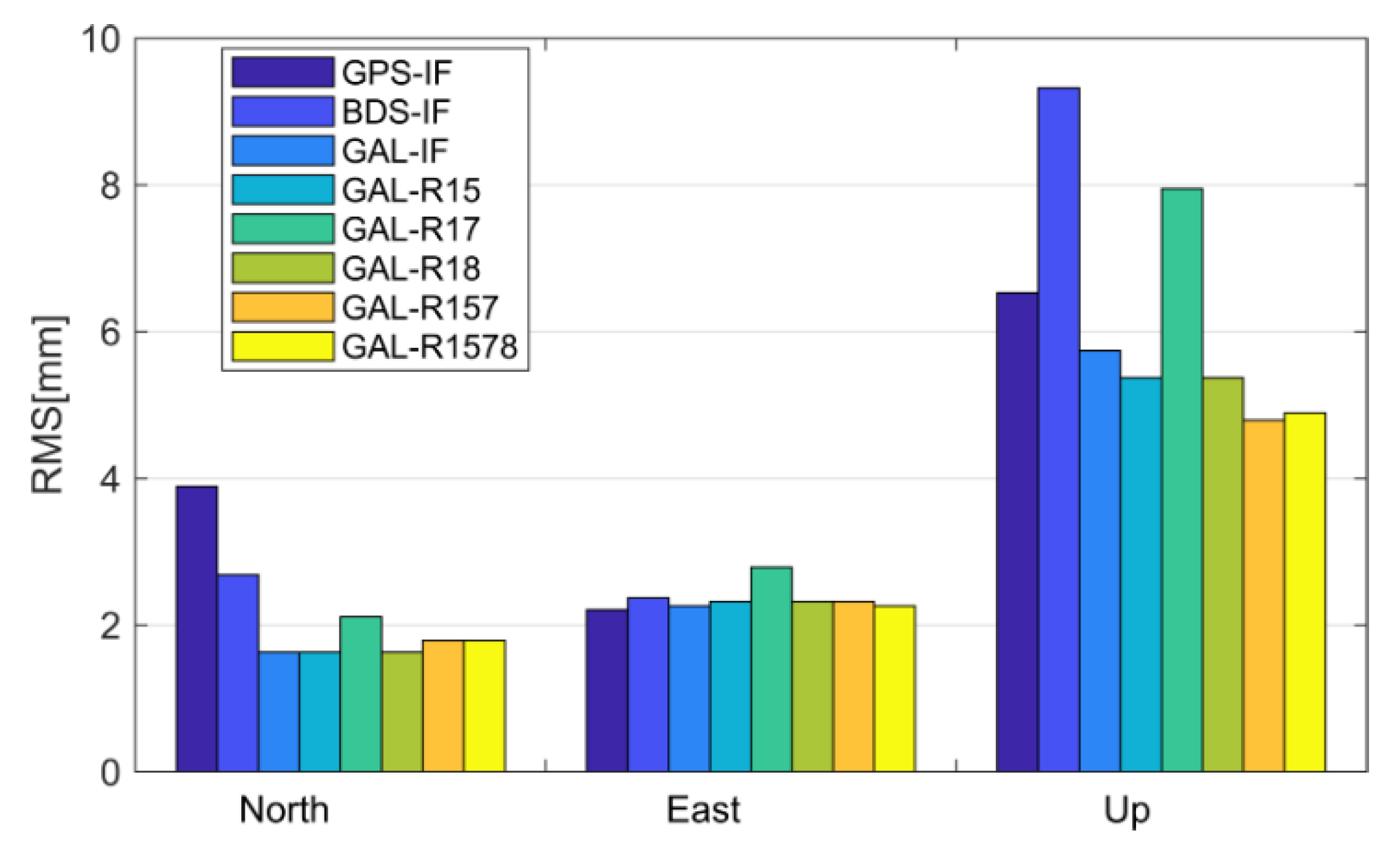
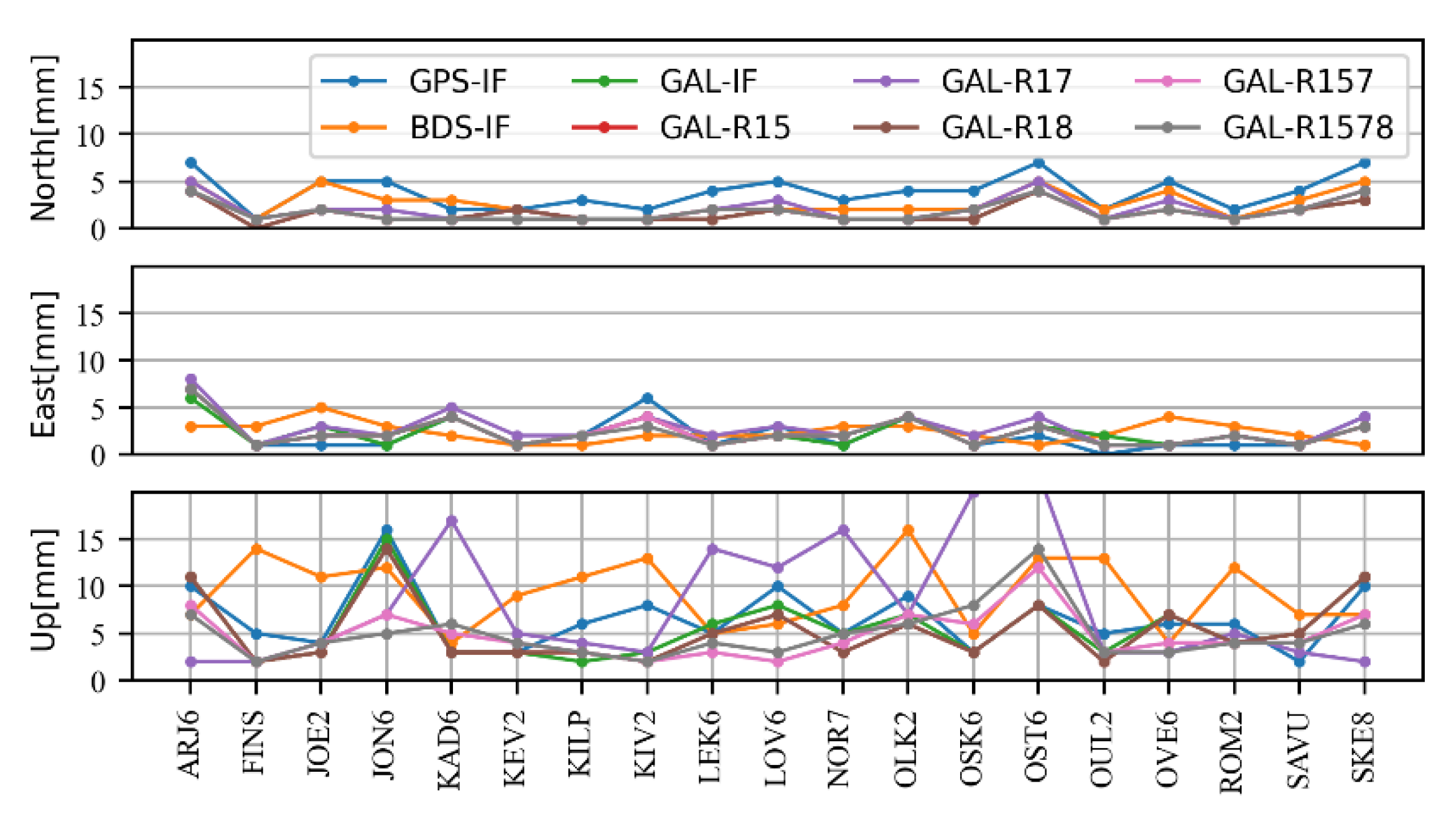
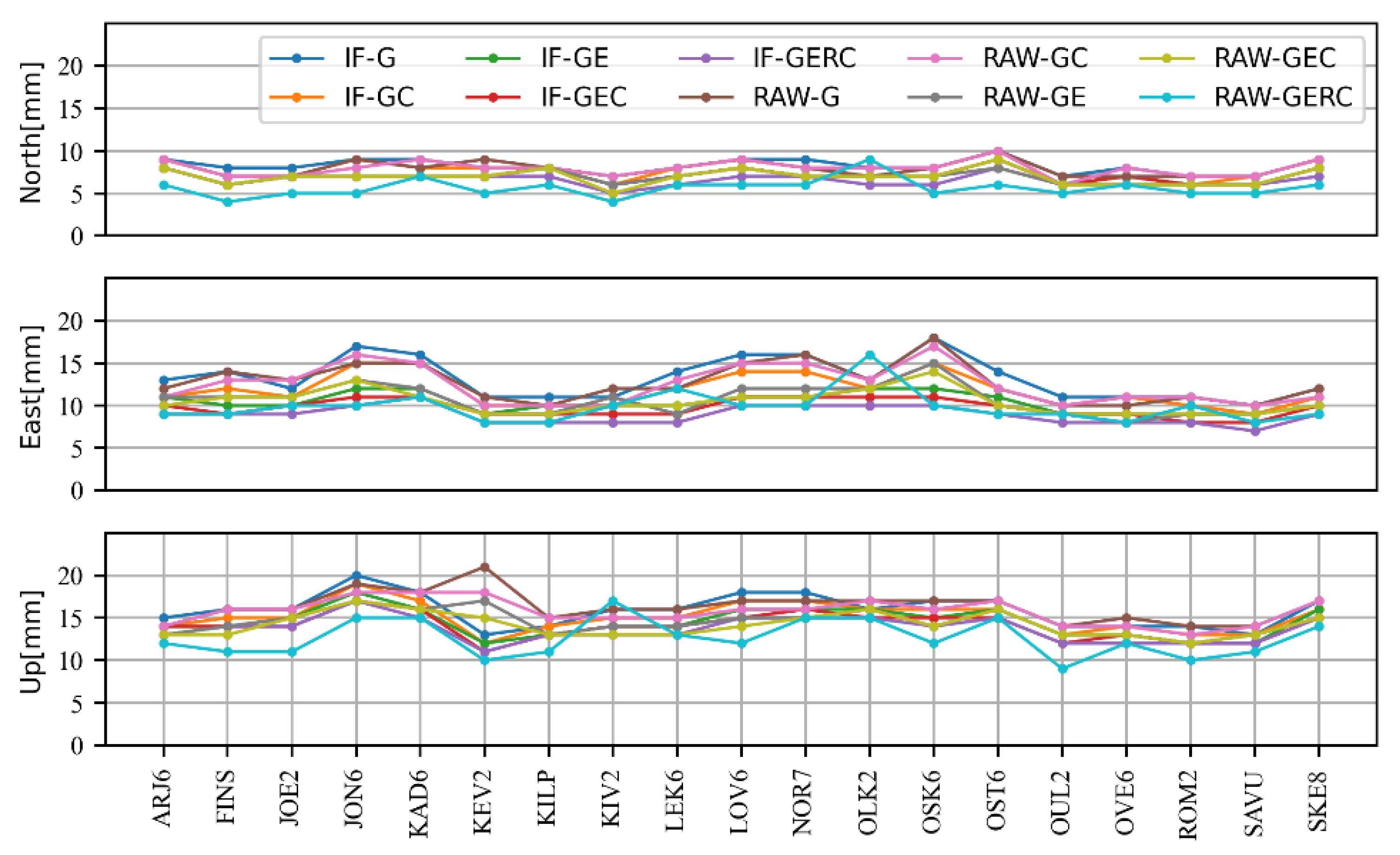
3.3. Evaluation of the Accuracy of Dual- and Triple-Frequency Galileo Static PPP
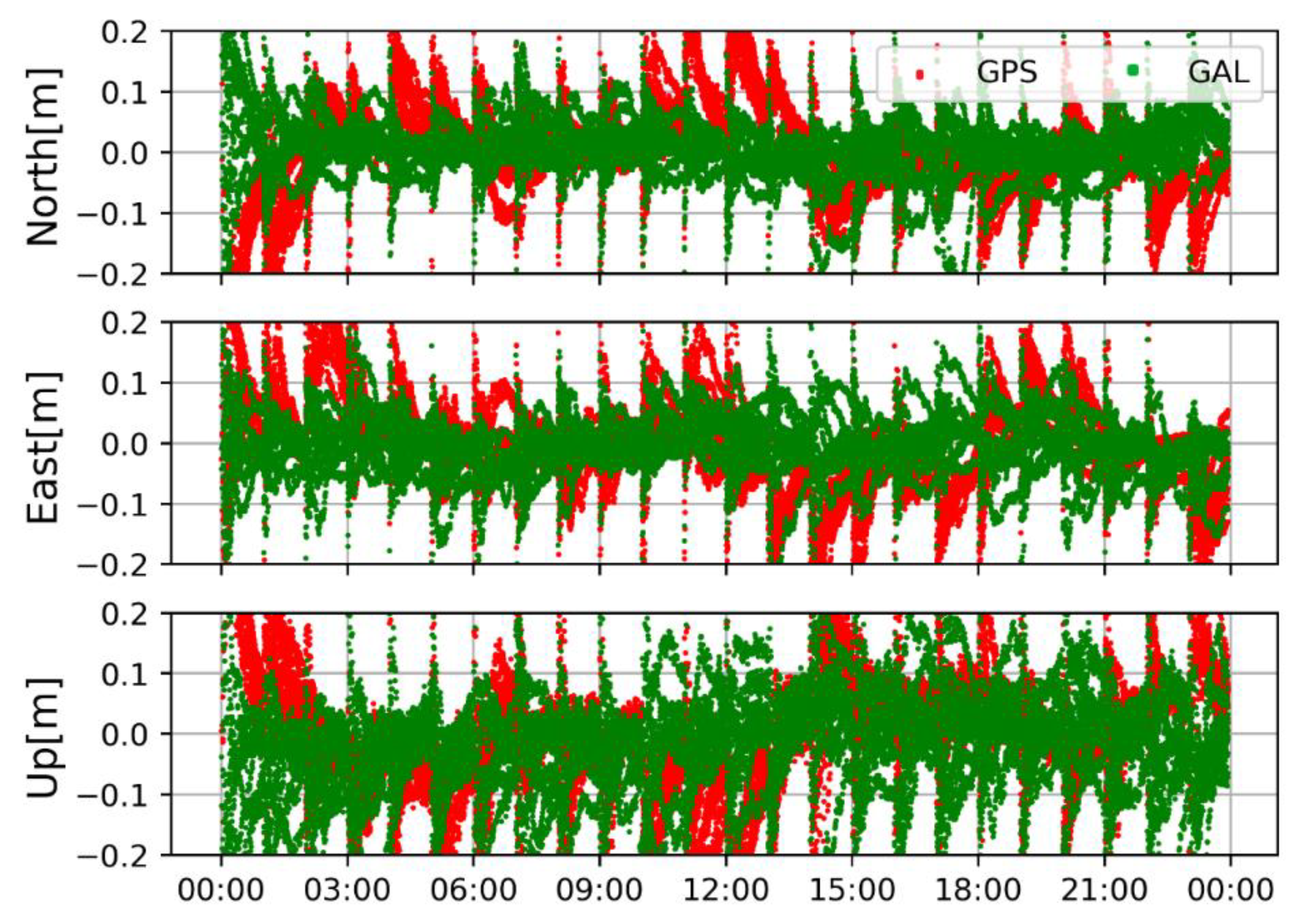
3.4. Accuracy of Multi-Frequency Galileo Kinematic PPP
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Douša, J.; Václavovic, P. Accuracy Evaluation of Ionospheric Delay from Multi-Scale Reference Networks and Its Augmentation to PPP during Low Solar Activity. ISPRS Int. J. Geo-Inf. 2021, 10, 516. [Google Scholar] [CrossRef]
- Pan, Z.; Chai, H.; Kong, Y. Integrating multi-GNSS to improve the performance of precise point positioning. Adv. Space Res. 2017, 60, 2596–2606. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 23, 325–331. [Google Scholar] [CrossRef]
- Nava, B.; Coisson, P.; Radicella, S.M. A new version of the NeQuick ionosphere electron density model. J. Atmos. Sol. Terr. Phys. 2008, 70, 1856–1862. [Google Scholar] [CrossRef]
- Peng, Y.; Scales, W.A.; Lin, D. GNSS-based hardware-in-the-loop simulations of spacecraft formation flying with the global ionospheric model TIEGCM. GPS Solut. 2021, 25, 65. [Google Scholar] [CrossRef]
- Ren, X.; Chen, J.; Li, X.; Zhang, X.; Freeshah, M. Performance evaluation of real-time global ionospheric maps provided by different IGS analysis centers. GPS Solut. 2019, 23, 1–17. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, J.; Wang, B. Performance of BDS-3: Measurement Quality Analysis, Precise Orbit and Clock Determination. Sensors 2017, 17, 1233. [Google Scholar] [CrossRef] [Green Version]
- Jiao, G.; Song, S.; Ge, Y.; Su, K.; Liu, Y. Assessment of BeiDou-3 and multi-GNSS precise point positioning performance. Sensors 2019, 19, 2496. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Bock, Y. Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J. Geod. 2013, 87, 449–460. [Google Scholar] [CrossRef]
- Cao, X.; Li, J.; Zhang, S.; Kuang, K.; Gao, K.; Zhao, Q.; Hong, H. Uncombined precise point positioning with triple-frequency GNSS signals. Adv. Space Res. 2019, 63, 2745–2756. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Jiao, G. Assessment of multi-frequency global navigation satellite system precise point positioning models using GPS, BeiDou, GLONASS, Galileo and QZSS. Meas. Sci. Technol. 2020, 31, 064008. [Google Scholar] [CrossRef]
- An, X.; Meng, X.; Jiang, W. Multi-constellation GNSS precise point positioning with multi-frequency raw observations and dual-frequency observations of ionospheric-free linear combination. Satell. Navig. 2020, 1, 1–13. [Google Scholar] [CrossRef]
- Duong, V.; Harima, K.; Choy, S.; Laurichesse, D.; Rizos, C. An optimal linear combination model to accelerate PPP convergence using multi-frequency multi-GNSS measurements. GPS Solut. 2019, 23, 1–15. [Google Scholar] [CrossRef]
- Xiao, G.; Li, P.; Gao, Y.; Heck, B. A Unified Model for Multi-Frequency PPP Ambiguity Resolution and Test Results with Galileo and BeiDou Triple-Frequency Observations. Remote Sens. 2019, 11, 116. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Liu, G.; Li, X.; Zhou, F.; Feng, G.; Yuan, Y.; Zhang, K. Galileo PPP rapid ambiguity resolution with five-frequency observations. GPS Solut. 2020, 24, 1–13. [Google Scholar] [CrossRef]
- Xin, S.; Geng, J.; Guo, J.; Meng, X. On the choice of the third-frequency Galileo signals in accelerating PPP ambiguity resolution in case of receiver antenna phase center errors. Remote Sens. 2020, 12, 1315. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Václavovic, P.; Douša, J. Performance Evaluation of Troposphere Estimated from Galileo-Only Multi-Frequency Observations. Remote Sens. 2020, 12, 373. [Google Scholar] [CrossRef] [Green Version]
- Saastamoinen, J. Introduction to practical computation of astronomical refraction. Bull. Géodésique 1972, 46, 383–397. [Google Scholar] [CrossRef]
- Duan, B.; Hugentobler, U.; Selmke, I.; Wang, N. Estimating ambiguity fixed satellite orbit, integer clock and daily bias products for GPS L1/L2, L1/L5 and Galileo E1/E5a, E1/E5b signals. J. Geod. 2021, 95, 1–14. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Settings |
|---|---|
| Sample rate | 30 s |
| Elevation cutoff angle | 7° |
| Phase wind-up | Phase wind-up correction |
| Satellite and receiver antenna phase center | Using igs14_2101.atx |
| Relativity | Corrected |
| Satellite attitude model | Yaw-Steering |
| Satellite orbit/clock | Corrected with GFZ multi-GNSS final products |
| DCBs | Corrected with products provided by DLR |
| Earth tides correction | IERS2010 |
| Station coordinates | Estimated as static and kinematic |
| Troposphere | ZHD: Saastamoinen model [21] ZWD: Estimated as the random walk process parameter for each station Mapping function: Niell mapping function |
| Receiver clocks | Solved for at each epoch as white noise |
| Inter frequency bias (IFB) | Modeled as constant |
| Filter method | Kalman filter |
| Receiver Type | Antenna Type | Stations |
|---|---|---|
| TRIMBLE NETR9 | LEIAR25.R3 LEIT | ARJ6 JON6 KAD6 LOV6 NOR7 OSK6 OST6 OVE6 SKE8 LEK6 |
| JAVAD TRE_3 DELTA | JAVRINGANT_DM SCIS | KEV2 KIV2 KILP FINS JOE2 OLK2 OUL2 ROM2 SAVU |
| Group | Strategies |
|---|---|
| GPS-IF | L1/L2 IF PPP |
| BDS-IF | B1/B3 IF PPP |
| GAL-IF | E1/E5a IF PPP |
| GAL-R15 | E1/E5a RAW PPP |
| GAL-R17 | E1/E5b RAW PPP |
| GAL-R18 | E1/E5 RAW PPP |
| GAL-R157 | E1/E5a/E5b RAW PPP |
| GAL-R1578 | E1/E5a/E5b/E5 RAW PPP |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Zhao, L. Comparison Analysis on the Accuracy of Galileo PPP Using Different Frequency Combinations in Europe. Appl. Sci. 2021, 11, 10020. https://doi.org/10.3390/app112110020
Song J, Zhao L. Comparison Analysis on the Accuracy of Galileo PPP Using Different Frequency Combinations in Europe. Applied Sciences. 2021; 11(21):10020. https://doi.org/10.3390/app112110020
Chicago/Turabian StyleSong, Jia, and Lewen Zhao. 2021. "Comparison Analysis on the Accuracy of Galileo PPP Using Different Frequency Combinations in Europe" Applied Sciences 11, no. 21: 10020. https://doi.org/10.3390/app112110020