
An Aerosol Sensor for Multi-Sized Particles Detection Based on Surface Acoustic Wave Resonator and Cascade Impactor


Abstract
:1. Introduction
2. Design and Simulation
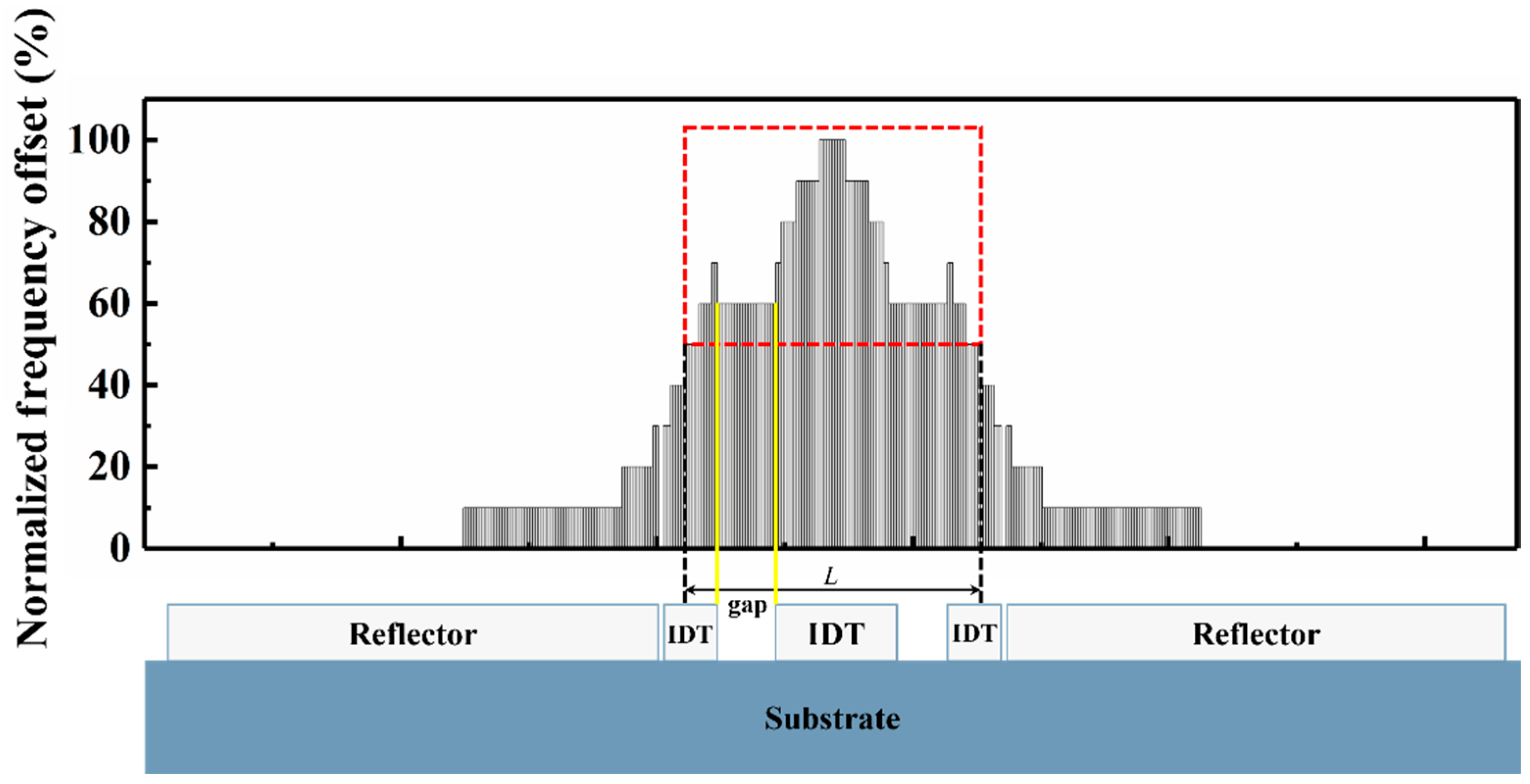
2.1. Simulation of the Relative Sensitivity with Different Loaded Areas on Surface of SAWR
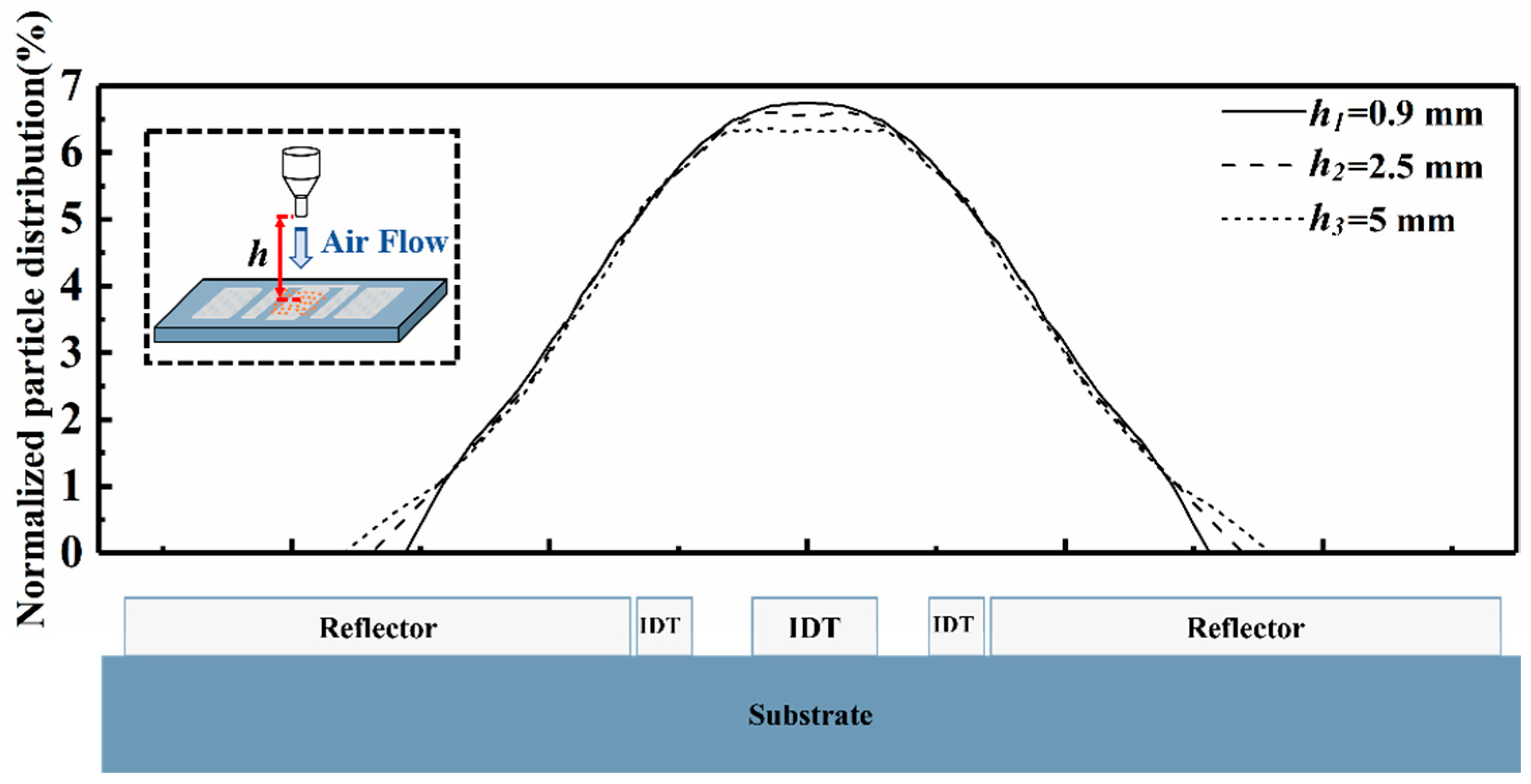
2.2. Simulation of Particle Position Distribution with a Different Impact Distance
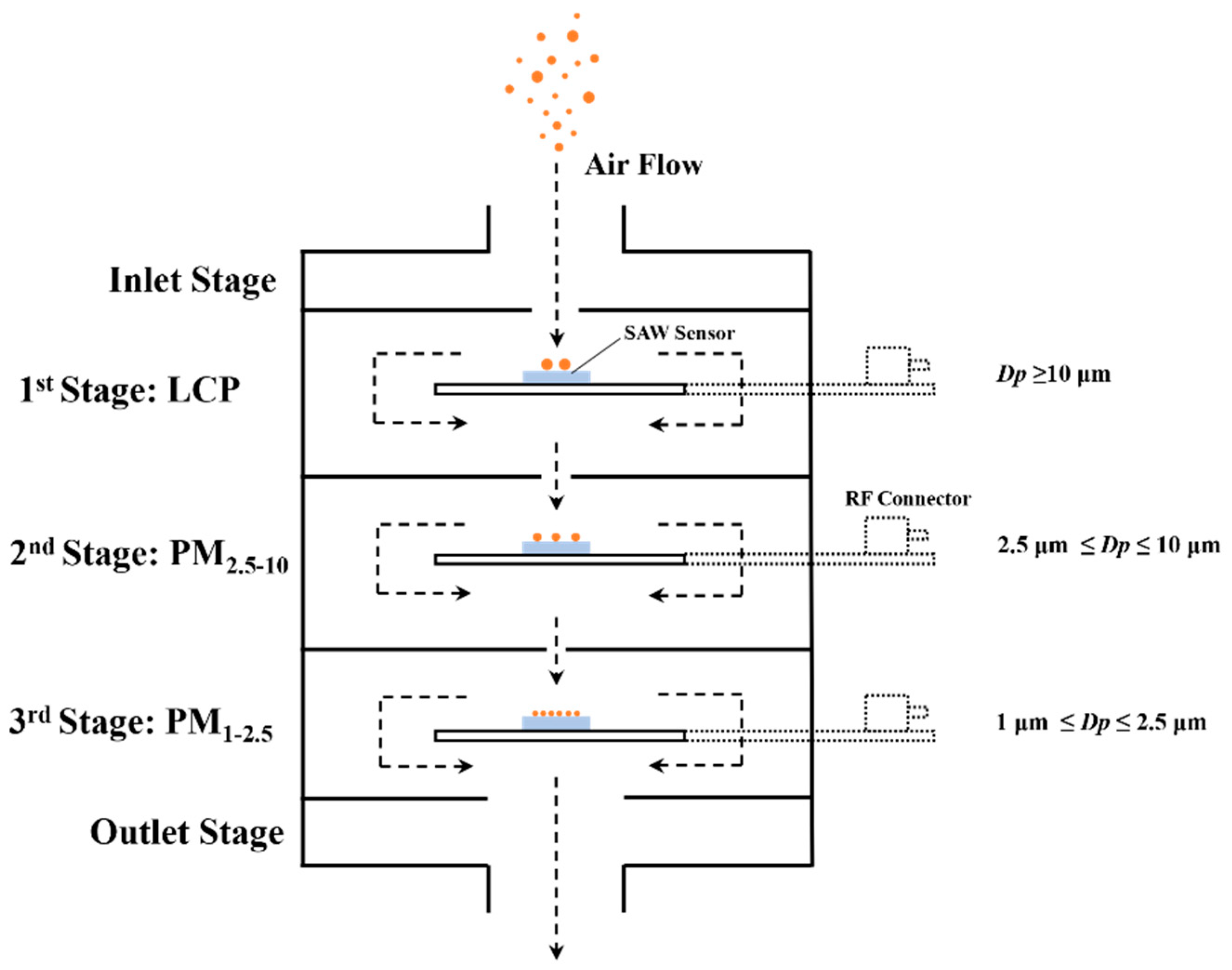
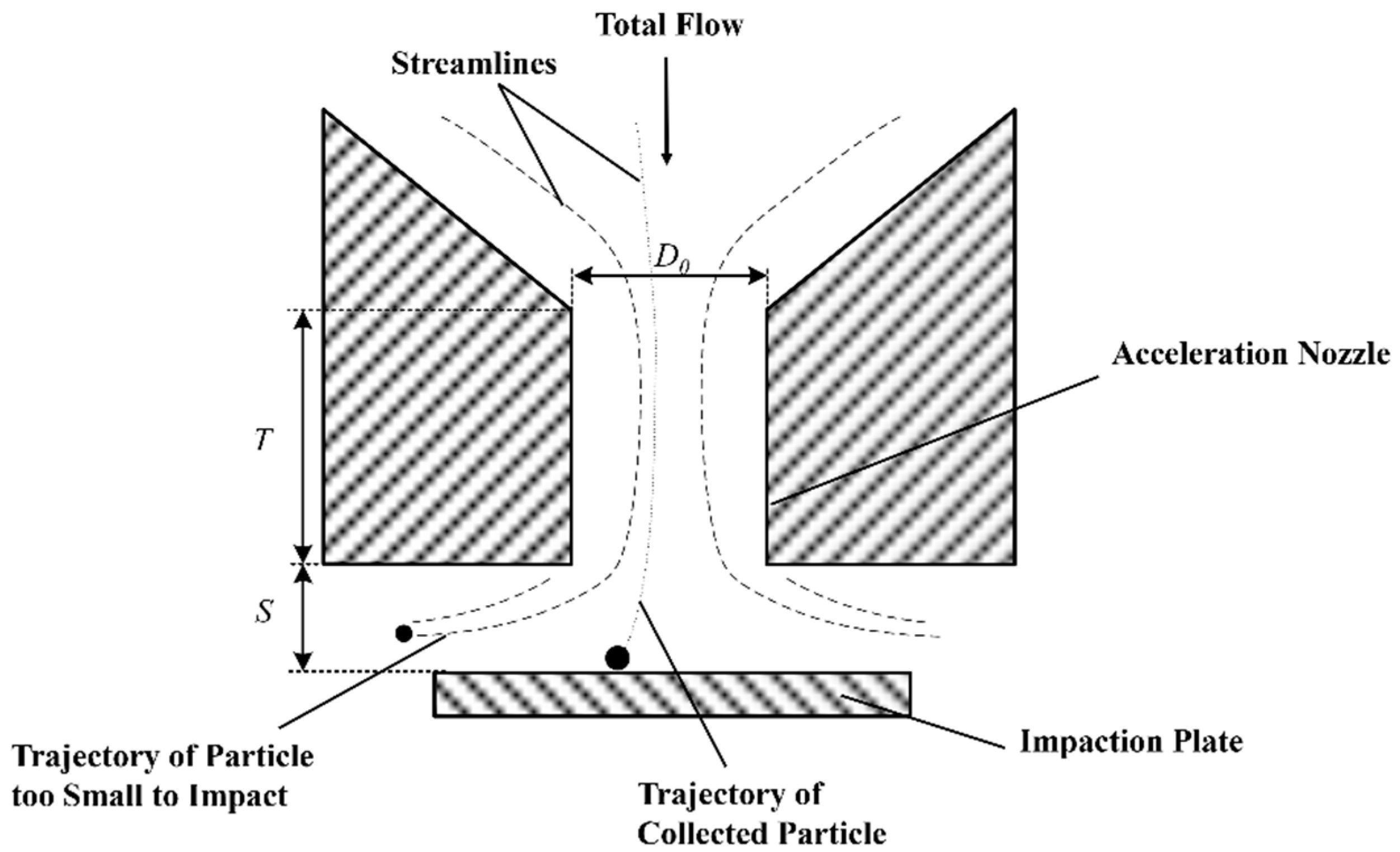
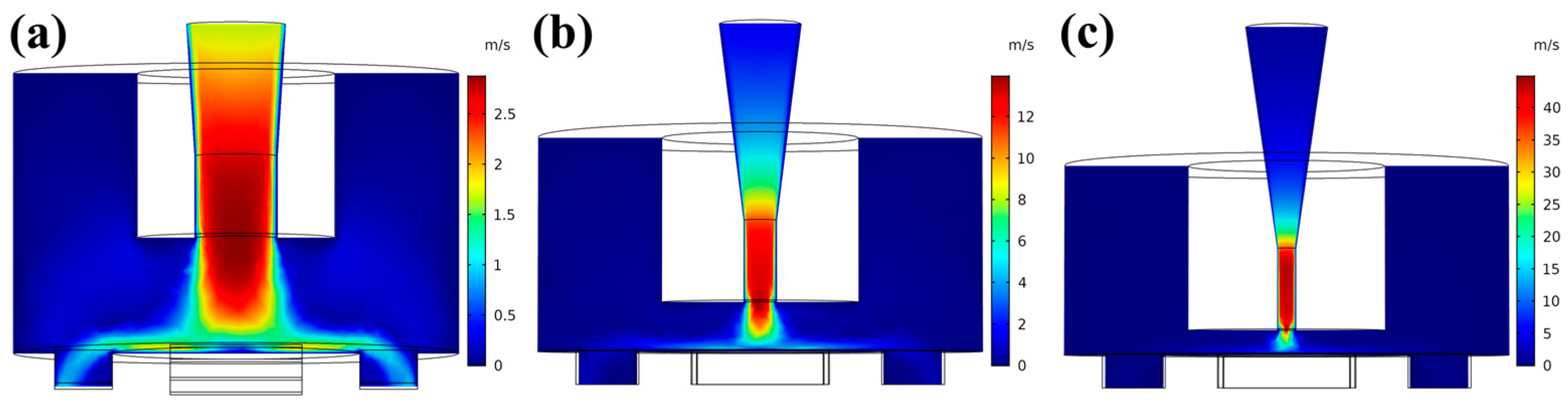
2.3. Impactor Design
3. Experiment and Results
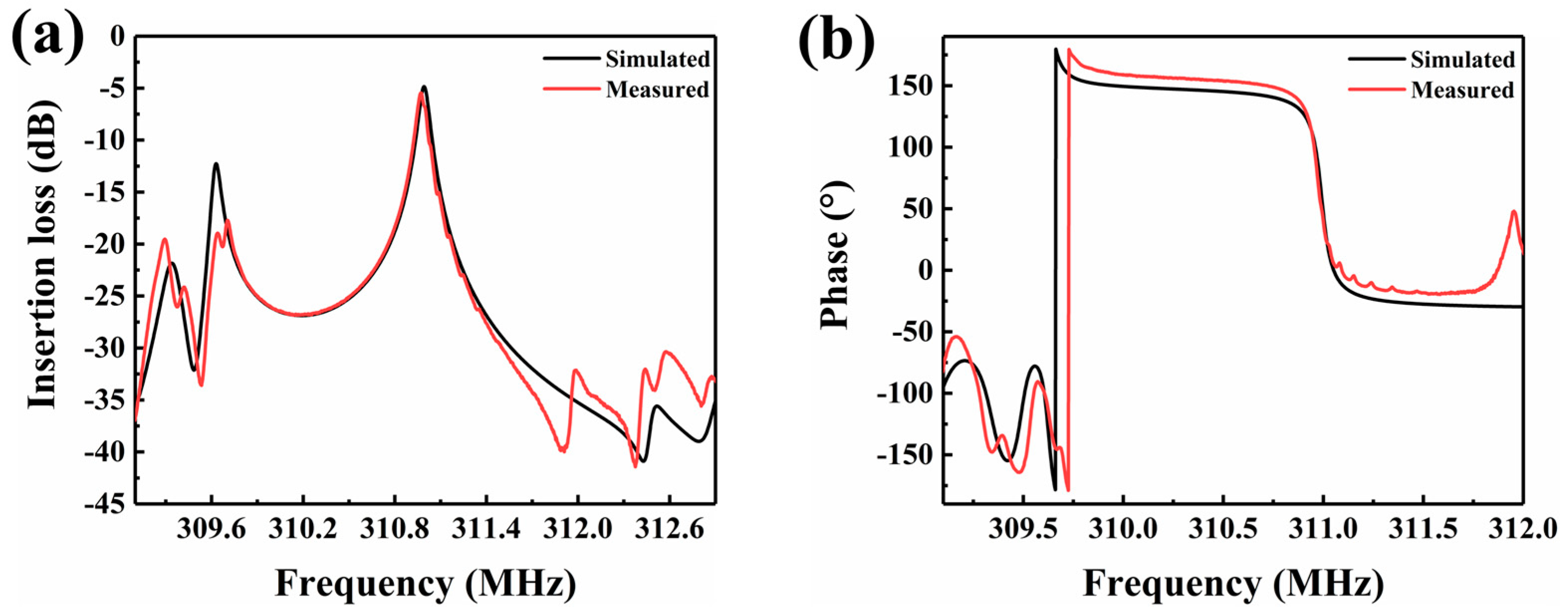
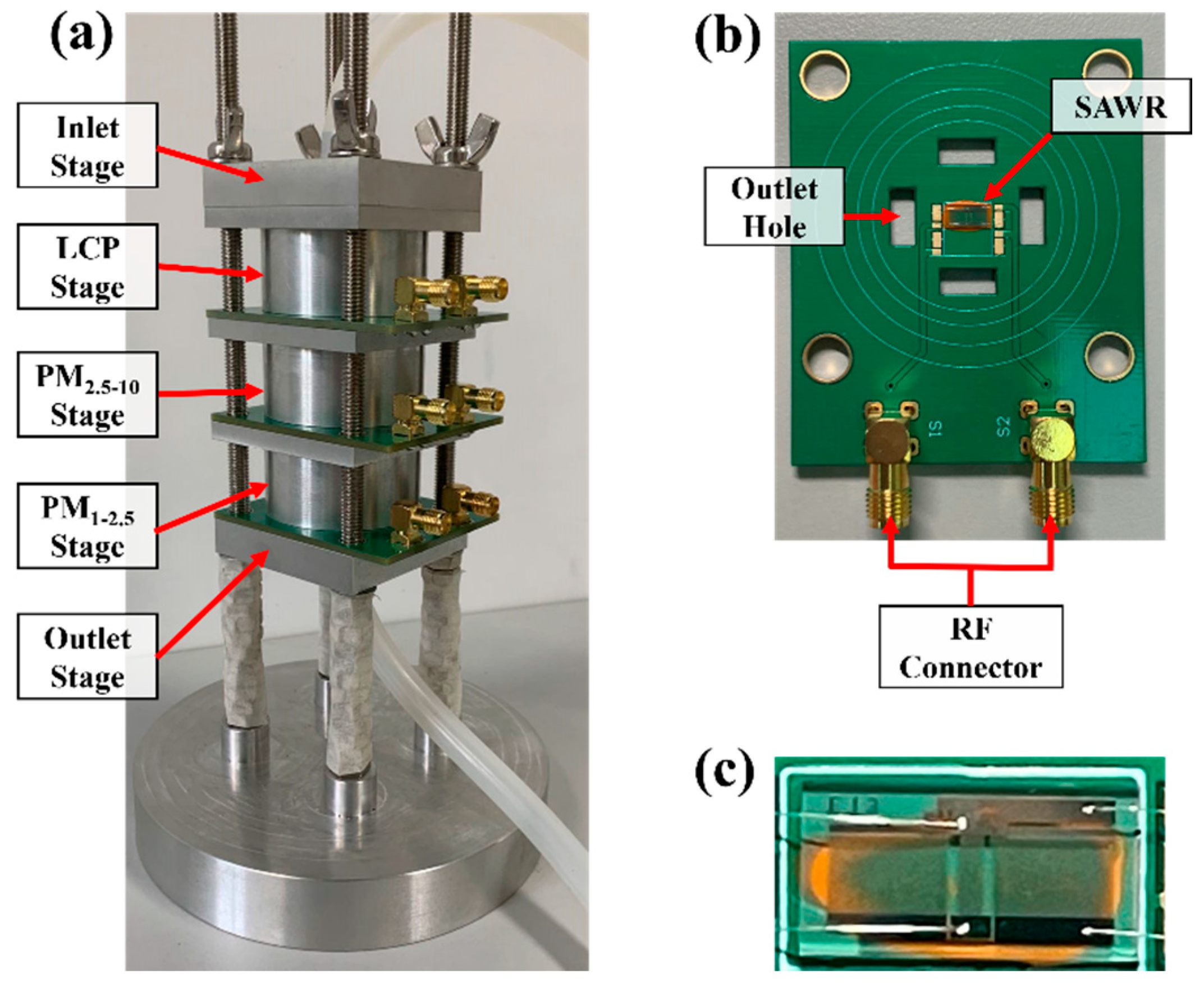
3.1. Sensor Fabrication
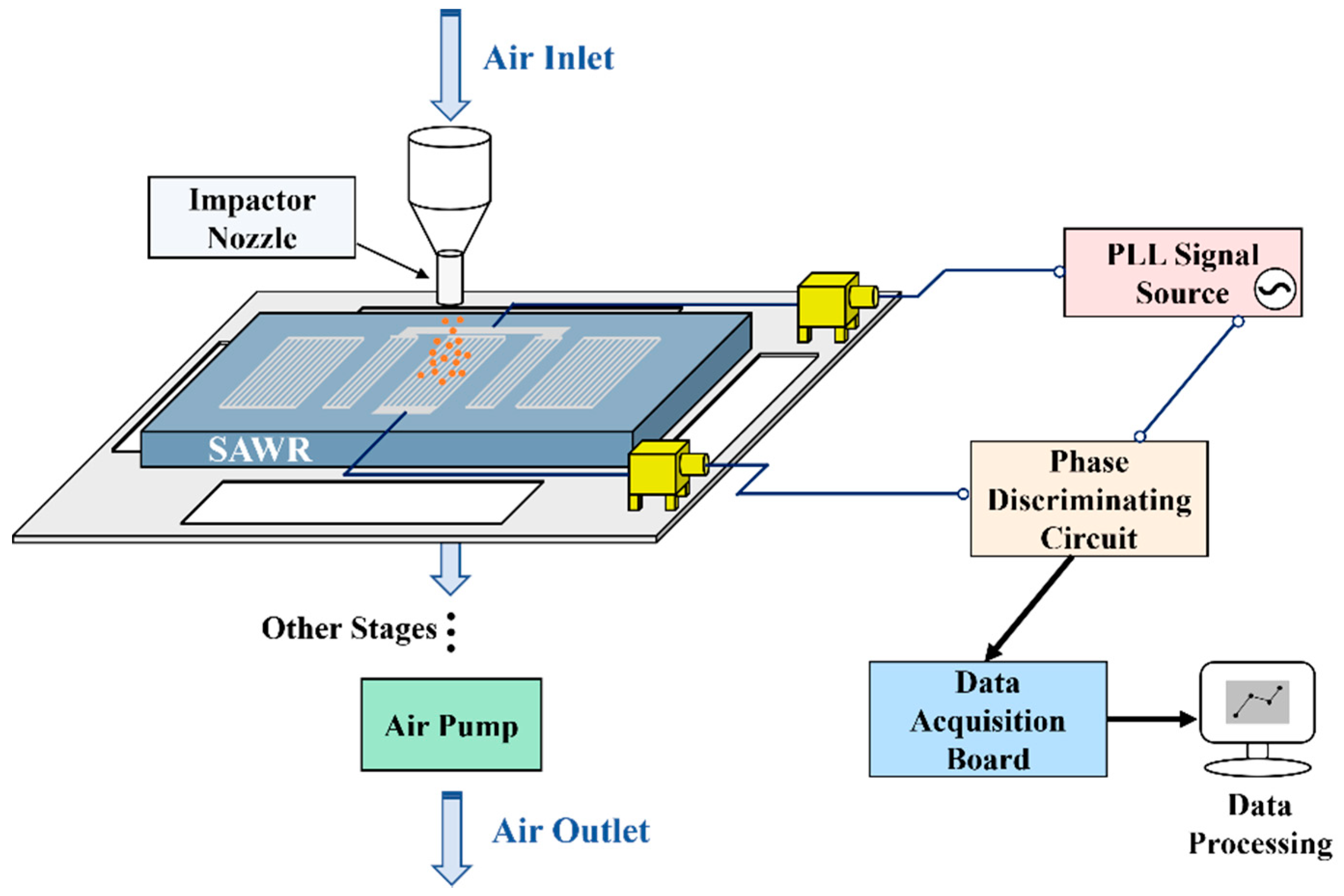
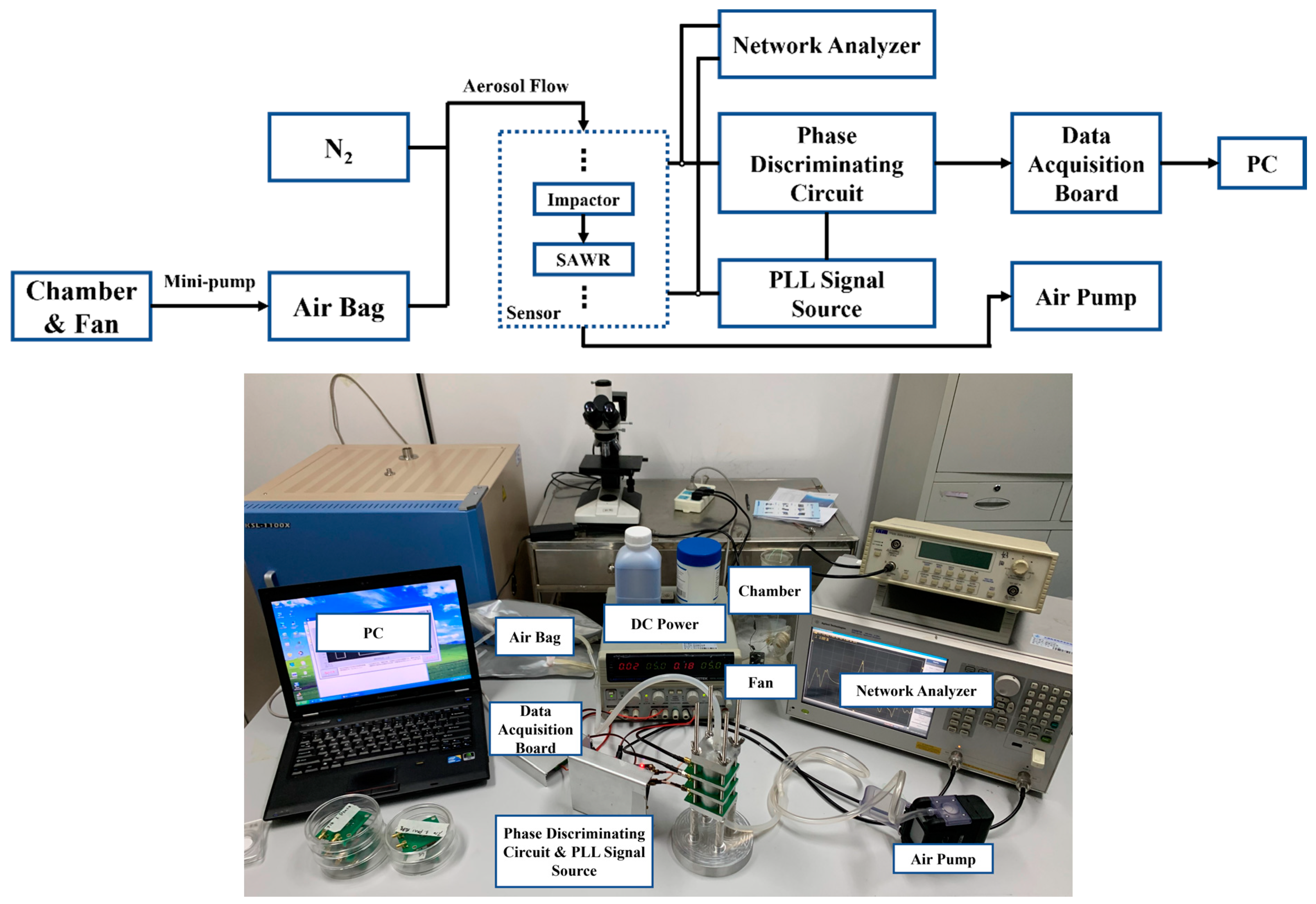
3.2. Experimental Platform
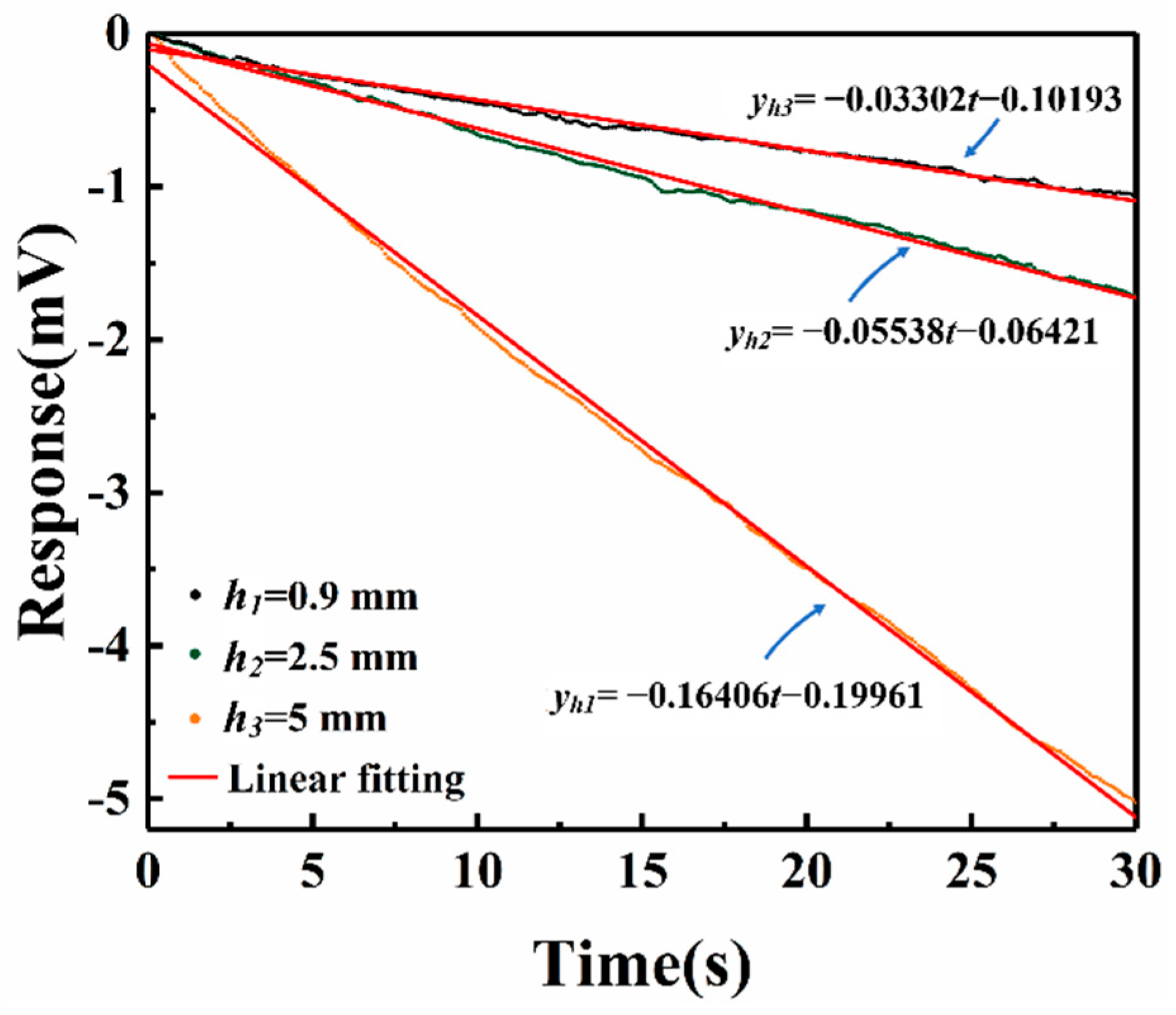
3.3. Respond Experiment on Different Distances from the Nozzle to Chip Surface
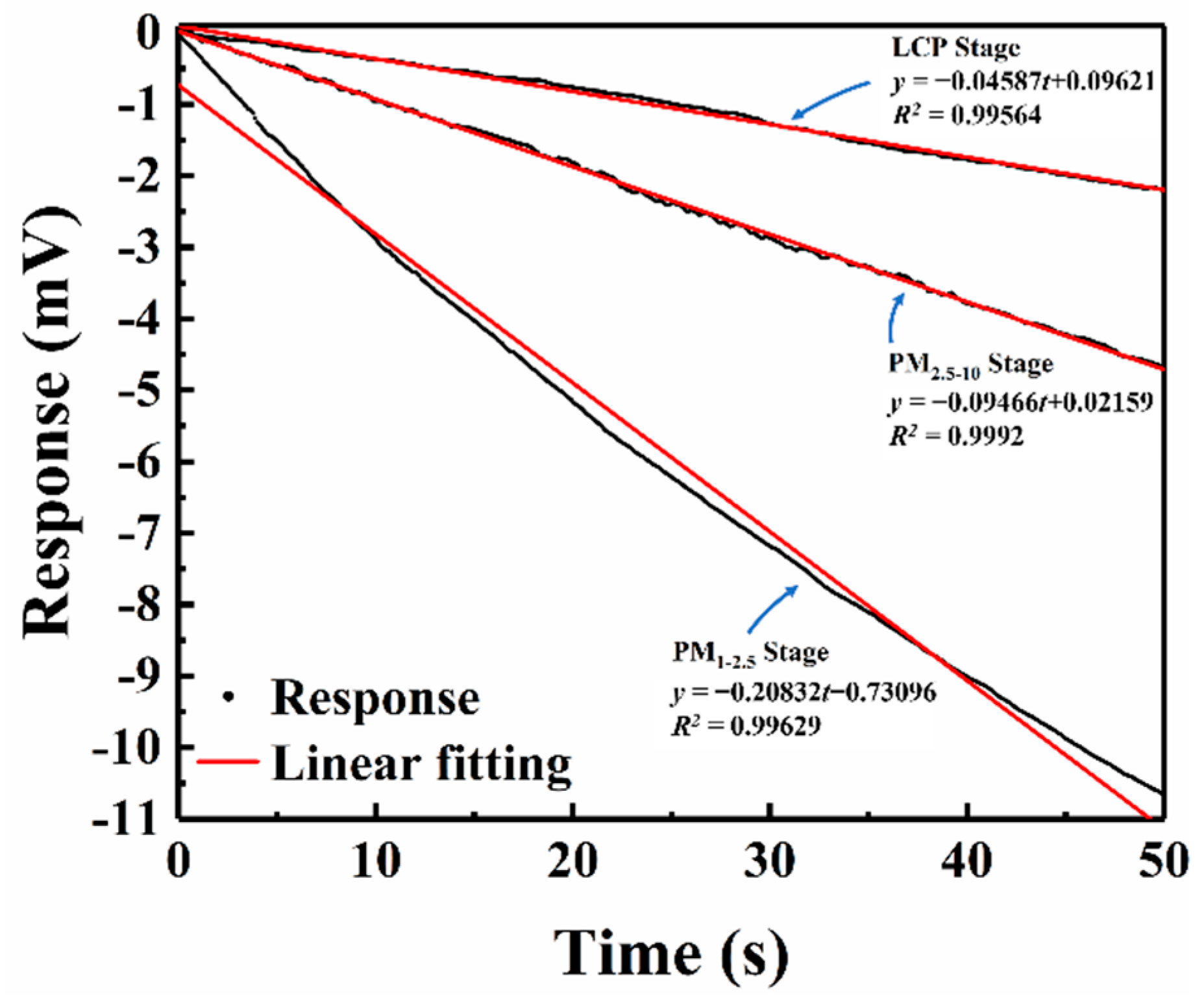
3.4. System Experiment and Repeatability Test
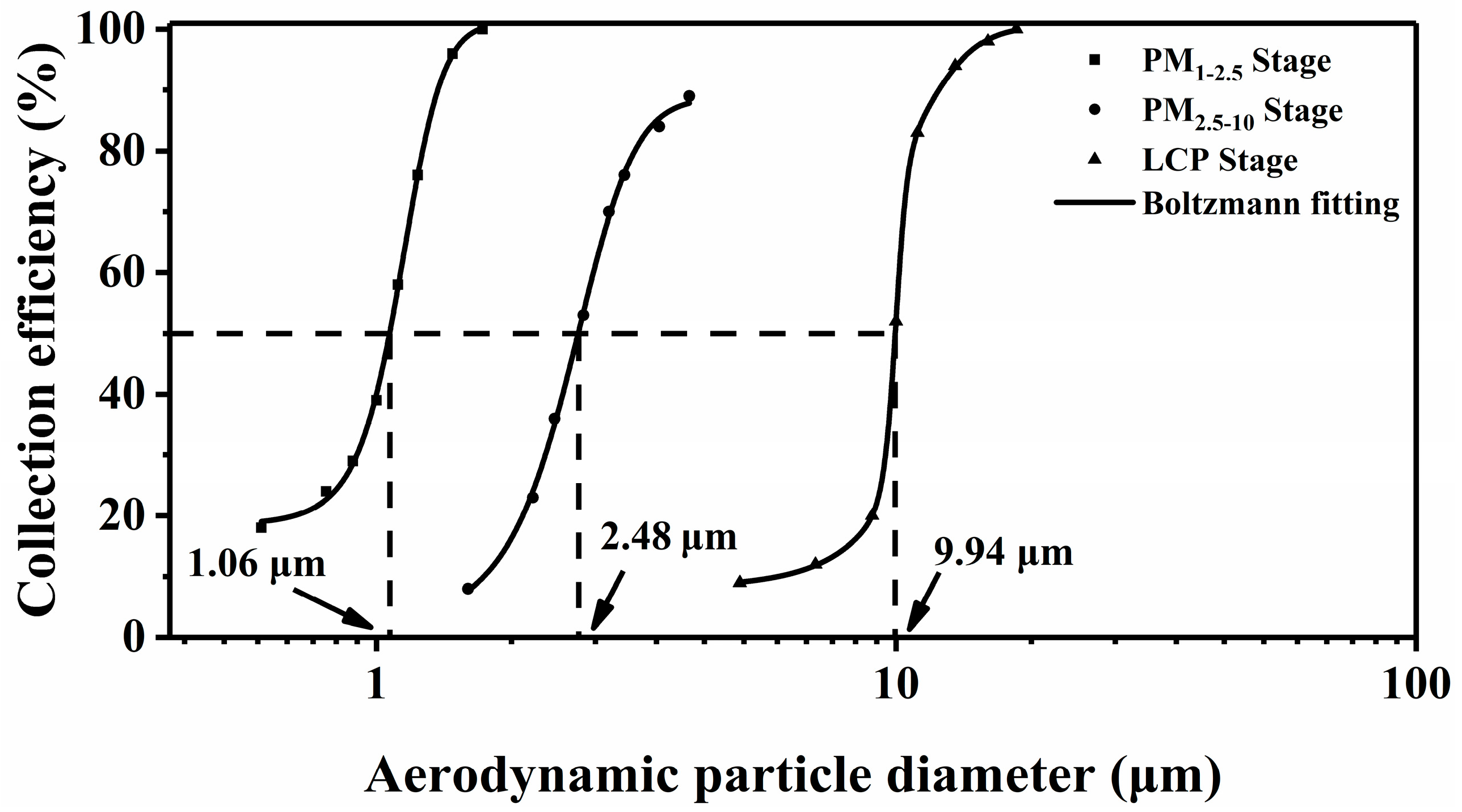
3.5. Impactor’s Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ostro, B.; Malig, B.; Broadwin, R.; Basu, R.; Gold, E.B.; Bromberger, J.T.; Derby, C.; Feinstein, S.; Greendale, G.A.; Jackson, E.A.; et al. Chronic PM2.5 Exposure and Inflammation: Determining Sensitive Subgroups in Mid-Life Women. Environ. Res. 2014, 132, 168–175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lavigne, É.; Talarico, R.; van Donkelaar, A.; Martin, R.V.; Stieb, D.M.; Crighton, E.; Weichenthal, S.; Smith-Doiron, M.; Burnett, R.T.; Chen, H. Fine Particulate Matter Concentration and Composition and the Incidence of Childhood Asthma. Environ. Int. 2021, 152, 106486. [Google Scholar] [CrossRef]
- Lee, D.-W.; Han, C.; Hong, Y.-C.; Oh, J.-M.; Bae, H.-J.; Kim, S.; Lim, Y.-H. Long-Term Exposure to Fine Particulate Matter and Incident Asthma among Elderly Adults. Chemosphere 2021, 272, 129619. [Google Scholar] [CrossRef] [PubMed]
- Tecer, L.H.; Alagha, O.; Karaca, F.; Tuncel, G.; Eldes, N. Particulate Matter (PM2.5, PM10-2.5, and PM10) and Children’s Hospital Admissions for Asthma and Respiratory Diseases: A Bidirectional Case-Crossover Study. J. Toxicol. Environ. Health Part A 2008, 71, 512–520. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization (Ed.) Air Quality Guidelines: Global Update 2005: Particulate Matter, Ozone, Nitrogen Dioxide, and Sulfur Dioxide; World Health Organization: Copenhagen, Denmark, 2006; ISBN 978-92-890-2192-0. [Google Scholar]
- Wilson, W.E.; Chow, J.C.; Claiborn, C.; Fusheng, W.; Engelbrecht, J.; Watson, J.G. Monitoring of Particulate Matter Outdoors. Chemosphere 2002, 49, 1009–1043. [Google Scholar] [CrossRef]
- White, R.M.; Paprotny, I.; Doering, F.; Cascio, W.E.; Solomon, P.A.; Gundel, L.A. Sensors and ‘Apps’ for Community-Based Atmospheric Monitoring. EM Air Waste Manag. Assoc. Mag. Environ. Manag 2012, 5, 36–40. [Google Scholar]
- Chung, A.; Chang, D.P.Y.; Kleeman, M.J.; Perry, K.D.; Cahill, T.A.; Dutcher, D.; McDougall, E.M.; Stroud, K. Comparison of Real-Time Instruments Used To Monitor Airborne Particulate Matter. J. Air Waste Manag. Assoc. 2001, 51, 109–120. [Google Scholar] [CrossRef] [PubMed]
- Strutt, J.W. (Ed.) On Waves propagated along the Plane Surface of an Elastic Solid. In Scientific Papers: Volume 2: 1881–1887; Cambridge Library Collection—Mathematics; Cambridge University Press: Cambridge, UK, 2009; Volume 2, pp. 441–447. ISBN 978-1-108-00543-2. [Google Scholar]
- White, R.M.; Voltmer, F.W. Direct Piezoelectric Coupling to Surface Elastic Waves. Appl. Phys. Lett. 1965, 7, 314–316. [Google Scholar] [CrossRef]
- Bowers, W.D.; Chuan, R.L. Surface Acoustic-wave Piezoelectric Crystal Aerosol Mass Microbalance. Rev. Sci. Instrum. 1989, 60, 1297–1302. [Google Scholar] [CrossRef]
- Hao, W.; Liu, J.; Liu, M.; He, S. Development of a New Surface Acoustic Wave Based Pm2.5 Monitor; Wang, X., Wang, Y., Li, H., Eds.; IEEE: New York, NY, USA, 2014; pp. 52–55. ISBN 978-1-4799-6425-3. [Google Scholar]
- Wang, Y.; Wang, Y.; Liu, W.; Chen, D.; Wu, C.; Xie, J. An Aerosol Sensor for PM1 Concentration Detection Based on 3D Printed Virtual Impactor and SAW Sensor. Sens. Actuators A Phys. 2019, 288, 67–74. [Google Scholar] [CrossRef]
- Kuo, F.-Y.; Lin, Y.-C.; Ke, L.-Y.; Tsai, C.-J.; Yao, D.-J. Detection of Particulate Matter of Size 2.5 Μm with a Surface-Acoustic-Wave Sensor Combined with a Cyclone Separator. Micromachines 2018, 9, 398. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, J.; Liu, M.; Liang, L.; Wang, W.; Xie, J. Airborne Particulate Matter Classification and Concentration Detection Based on 3D Printed Virtual Impactor and Quartz Crystal Microbalance Sensor. Sens. Actuators A Phys. 2016, 238, 379–388. [Google Scholar] [CrossRef]
- Djoumi, L.; Vanotti, M.; Blondeau-Patissier, V. Real Time Cascade Impactor Based On Surface Acoustic Wave Delay Lines for PM10 and PM2.5 Mass Concentration Measurement. Sensors 2018, 18, 255. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Jia, Y.; Sun, J.; Zhao, P.; Liu, J.; Zhang, Y.; Ning, Z. Configuration of Air Microfluidic Chip for Separating and Grading Respirable Dust. In Proceedings of the 19th Annual Conference and 8th International Conference of Chinese Society of Micro/Nano Technology (csmnt2017), Dalian, China, 26–29 October 2017; Iop Publishing Ltd.: Bristol, UK, 2018; Volume 986, p. UNSP 012017. [Google Scholar]
- SAW Gas Sensors: Comparison between Delay Line and Two Port Resonator. Sens. Actuators B Chem. 1995, 26, 187–190. [CrossRef]
- Rapp, M.; Reibel, J.; Stahl, U.; Stier, S.; Voigt, A. Influence of Phase Position on the Chemical Response of Oscillator Driven Polymer Coated SAW Resonators. In Proceedings of the 1998 IEEE International Frequency Control Symposium (Cat. No.98CH36165), Pasadena, CA, USA, 27–29 May 1998; pp. 621–629. [Google Scholar]
- Auld, B.A.; Green, R.E. Acoustic Fields and Waves in Solids: Two Volumes 1. Phys. Today 1974, 27, 63–64. [Google Scholar] [CrossRef]
- Plessky, V.; Koskela, J. Coupling-of-Modes Analysis of Saw Devices. Int. J. High Speed Electron. Syst. 2000, 10, 81. [Google Scholar] [CrossRef]
- Hao, W.; Liu, J.; Liu, M.; Liang, Y.; He, S. Mass Sensitivity Optimization of a Surface Acoustic Wave Sensor Incorporating a Resonator Configuration. Sensors 2016, 16, 562. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baron, P.A.; Kulkarni, P.; Willeke, K. (Eds.) Aerosol Measurement: Principles, Techniques, and Applications, 3rd ed.; Wiley: Hoboken, NJ, USA, 2011; ISBN 978-0-470-38741-2. [Google Scholar]
- Nevalainen, A.; Pastuszka, J.; Liebhaber, F.; Willeke, K. Performance of Bioaerosol Samplers: Collection Characteristics and Sampler Design Considerations. Atmos. Environment. Part A Gen. Top. 1992, 26, 531–540. [Google Scholar] [CrossRef]
- Marple, V.A.; Willeke, K. Impactor Design. Atmos. Environ. 1976, 10, 891–896. [Google Scholar] [CrossRef]
- Zhang, N. Study on the Characteristics of Particulate Emissions from Eight Typical Indoor or Outdoor Combustion Behaviors; Zhejiang Normal University: Zhejiang, China, 2018. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Complexity | Instrument | Accuracy | Resolution | Measurement Cycle Time |
|---|---|---|---|---|---|
| Gravimetric | High | BETTERSIZE BTPM-AS1 | 10 μg (electronic balance) | 0.01 L/min (Airflow) | 1–100 h |
| TEOM | Low | Thermo Scientific 1405-F TEOM | <±1 μg/m3 (24 h) | 0.1 μg/m3 | 1–24 h |
| β-ray attenuation | Low | METONE BAM 1020 | <±2 μg/m3 | 0.1 μg/m3 | 1 h |
| Light scattering | Low | AeroQual Dust Sentry Pro | <±5 μg/m3 | 0.1 μg/m3 | 1 min–24 h |
| Structural Parameter | Value |
|---|---|
| Electrical period (μm) | 10 |
| Finger width (μm) | 2.5 |
| Metallization ratio | 0.5 |
| Acoustic aperture | 150 |
| Finger thickness (nm) | 250 |
| Grid period (μm) | 5 |
| Length between IDT1 and IDT2 | 22.5 |
| Length between IDT and reflector | |
| number of IDT1 finger pairs | 45 |
| number of IDT2 and IDT3 finger pairs | 23 |
| number of reflector finger pairs | 200 |
| COM-Parameter | Value (Non-Loaded) | Value (Loaded) |
|---|---|---|
| SAW Velocity (m/s) | 3146.045 | 3124.873 |
| Normalized static capacitance (F/m) | 4.290 × 10−11 | 5.150 × 10−11 |
| Normalized reflectivity | −0.023 | −0.031 |
| Normalized transduction coefficient (Ω−1/2) | 2.570 × 10−5 | 2.282 × 10−5 |
| Stage | D0 (mm) | T (mm) | S (mm) |
|---|---|---|---|
| LCP | 4.94 | 9 | 5 |
| PM2.5–10 | 1.99 | 5 | 3 |
| PM1–2.5 | 1.12 | 5 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Liu, J.; Liu, M.; You, R.; He, S. An Aerosol Sensor for Multi-Sized Particles Detection Based on Surface Acoustic Wave Resonator and Cascade Impactor. Appl. Sci. 2021, 11, 9833. https://doi.org/10.3390/app11219833
Chen Z, Liu J, Liu M, You R, He S. An Aerosol Sensor for Multi-Sized Particles Detection Based on Surface Acoustic Wave Resonator and Cascade Impactor. Applied Sciences. 2021; 11(21):9833. https://doi.org/10.3390/app11219833
Chicago/Turabian StyleChen, Zhiyuan, Jiuling Liu, Minghua Liu, Ran You, and Shitang He. 2021. "An Aerosol Sensor for Multi-Sized Particles Detection Based on Surface Acoustic Wave Resonator and Cascade Impactor" Applied Sciences 11, no. 21: 9833. https://doi.org/10.3390/app11219833
APA StyleChen, Z., Liu, J., Liu, M., You, R., & He, S. (2021). An Aerosol Sensor for Multi-Sized Particles Detection Based on Surface Acoustic Wave Resonator and Cascade Impactor. Applied Sciences, 11(21), 9833. https://doi.org/10.3390/app11219833