
A Local Adaptive Mesh Refinement for JFO Cavitation Model on Cartesian Meshes


Abstract
:1. Introduction
2. AMR Algorithm
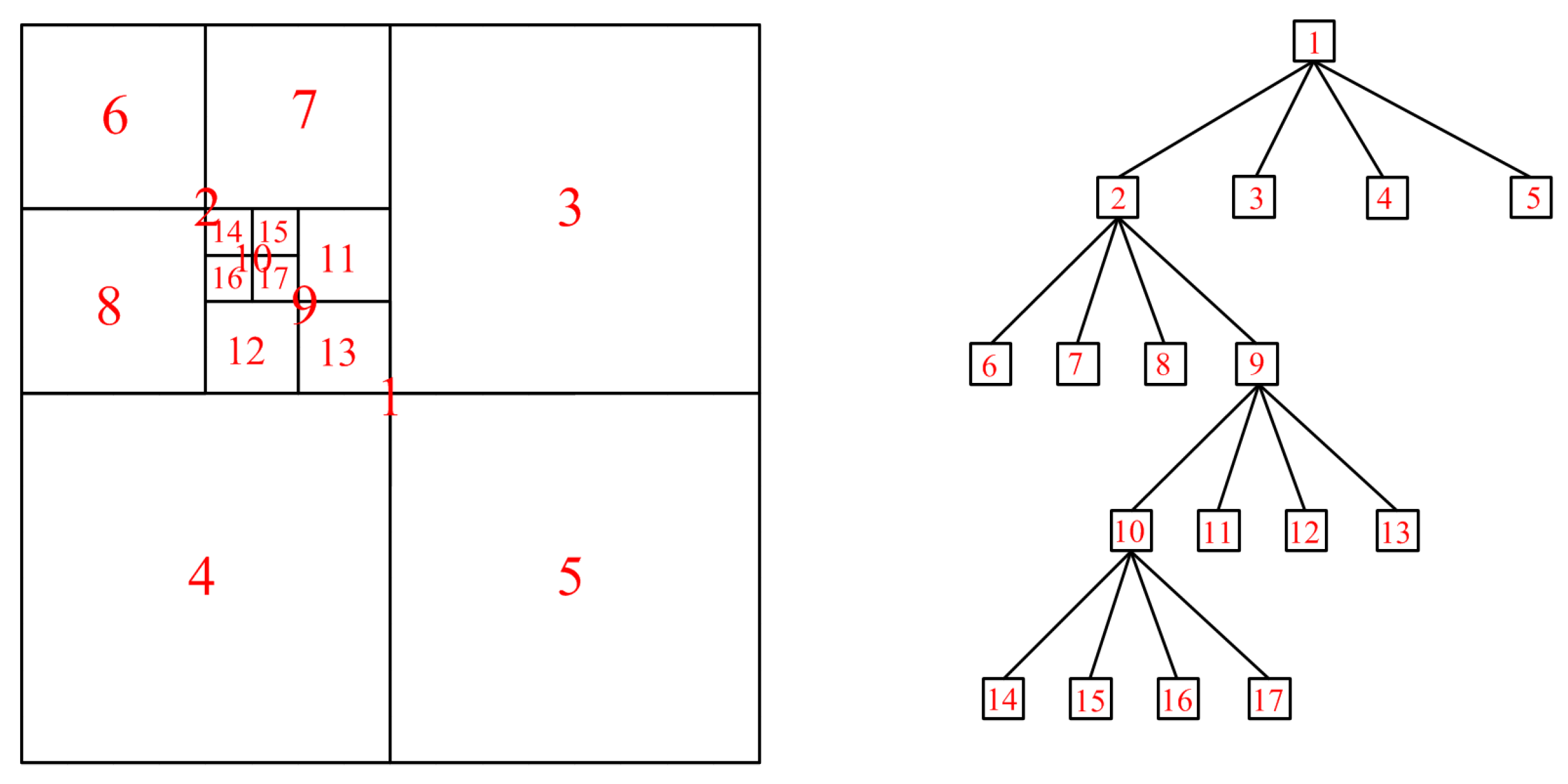
2.1. Mesh and Data Storage
| Algorithm 1 Mesh refining () |
| for each cell if a cell is a leaf cell and the refinement flag is 1 add four lines at the end of the matrix table; fill mesh relation information (cell number, type, parent, level, xy coordinate, and so on); interpolate initial flow variable using scatteredInterpolant() function (MATLAB function); end end |
| Algorithm 2 Mesh coarsening () |
| for each cell if four leaf cells belong to a common parent cell and all coarse flags are 1 remove the lines of the four leaf cells; modify the parent cell into leaf cell; interpolate initial flow variable using the average mean of the four child cells; end end |
2.2. Neighbor Finding
| Algorithm 3 Neighbor finding () |
| find neighbor of same size using ADJ function [34] according to a given direction; store query path simultaneously; find neighbor smaller size according to mirror query path using REFLECT function [34]; |
2.3. Neighbor Fixing
| Algorithm 4 Neighbor fixing () |
| while 1 if 2:1 condition is satisfied (checked by Neighbor finding () algorithm) break; end for each direction (N S W E) if the number of neighboring cells exceed three set refinement flag to 1; end end for each diagonal (NW NE SW SE) if the absolute mesh level difference between central cell and diagonal cell exceeds 1 set refinement flag to 1; end end perform Mesh refining () algorithm; end |
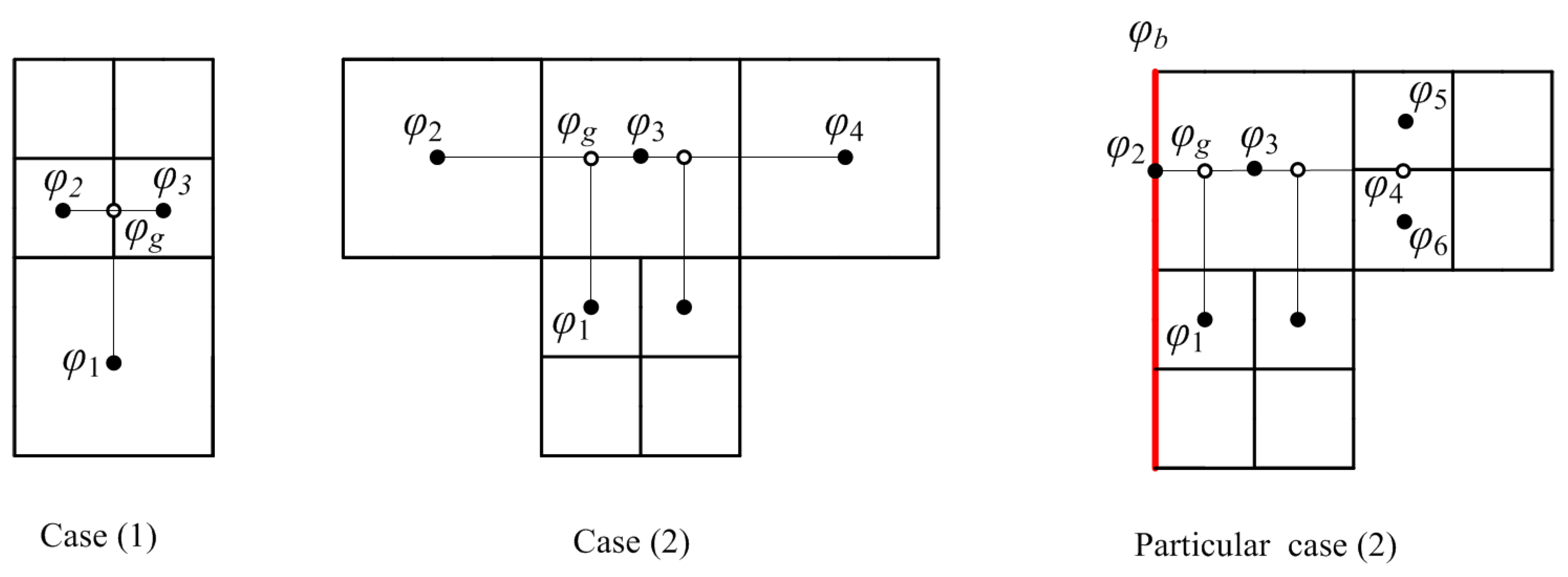
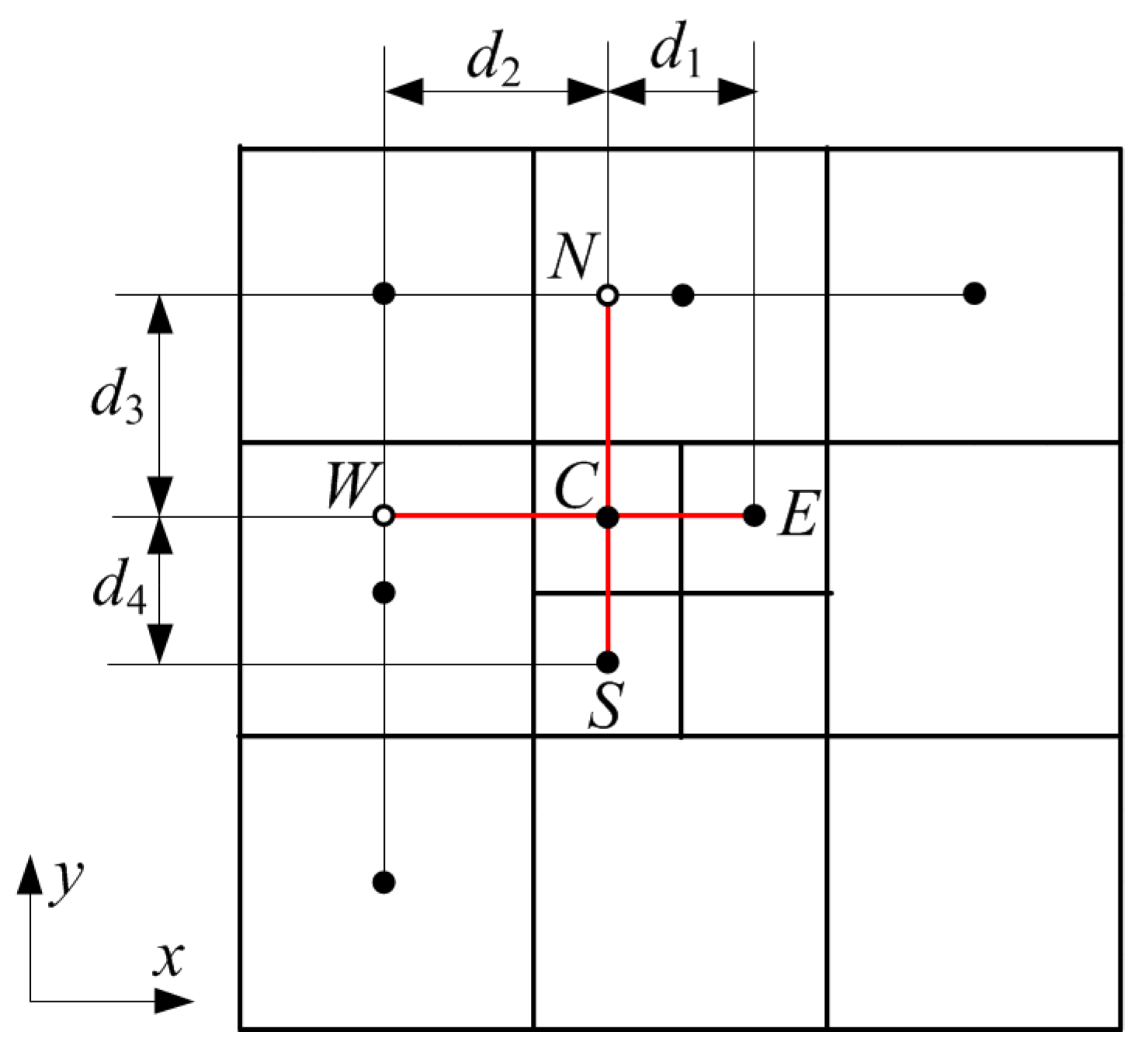
2.4. Handingnode Interpolating
| Algorithm 5 Handingnode interpolating () |
| if the neighbor cell is a boundary (Neighbor finding () algorithm returns zero) return the value of boundary condition; else if the number of neighbor cells is two (case (1)) return the average value using Equation (1); end if the number of neighbor cells is one and the level of neighbor cells is small than the level of the central cell (case (2)) return the quadratic interpolation value using Equation (2); end if the neighbor cell is the particular case (2) return the quadratic interpolation value using Equation (3); end end |
2.5. Periodic Matching
| Algorithm 6 Periodic matching () |
| detect the cells of west boundary and east boundary by Neighbor finding () algorithm; create periodic pair number table simultaneously; match the pair number according to the size of a cell; if 2:1 condition is not satisfying (checked by Neighbor finding () algorithm) preform Neighbor fixing () algorithm; end |
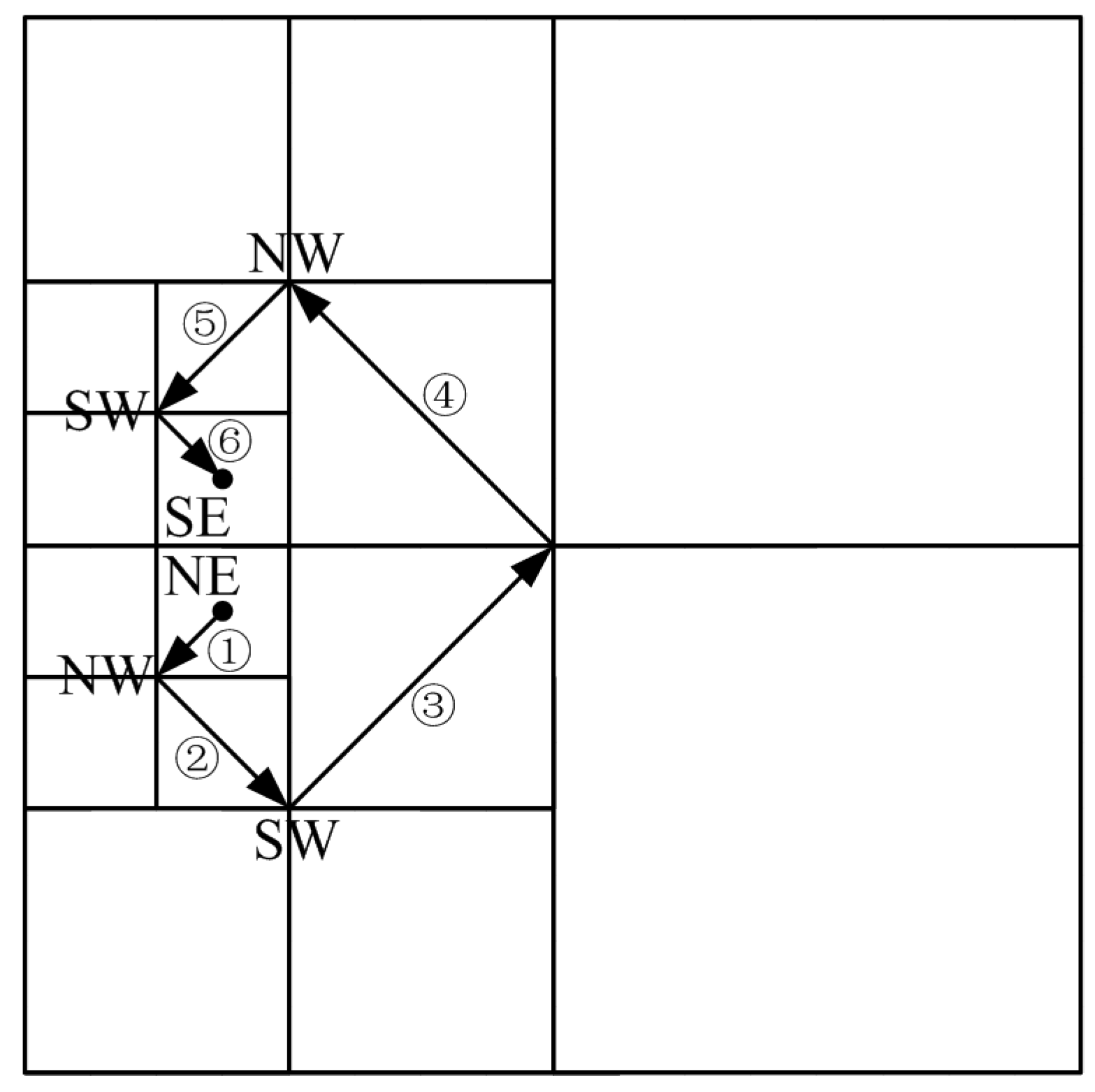
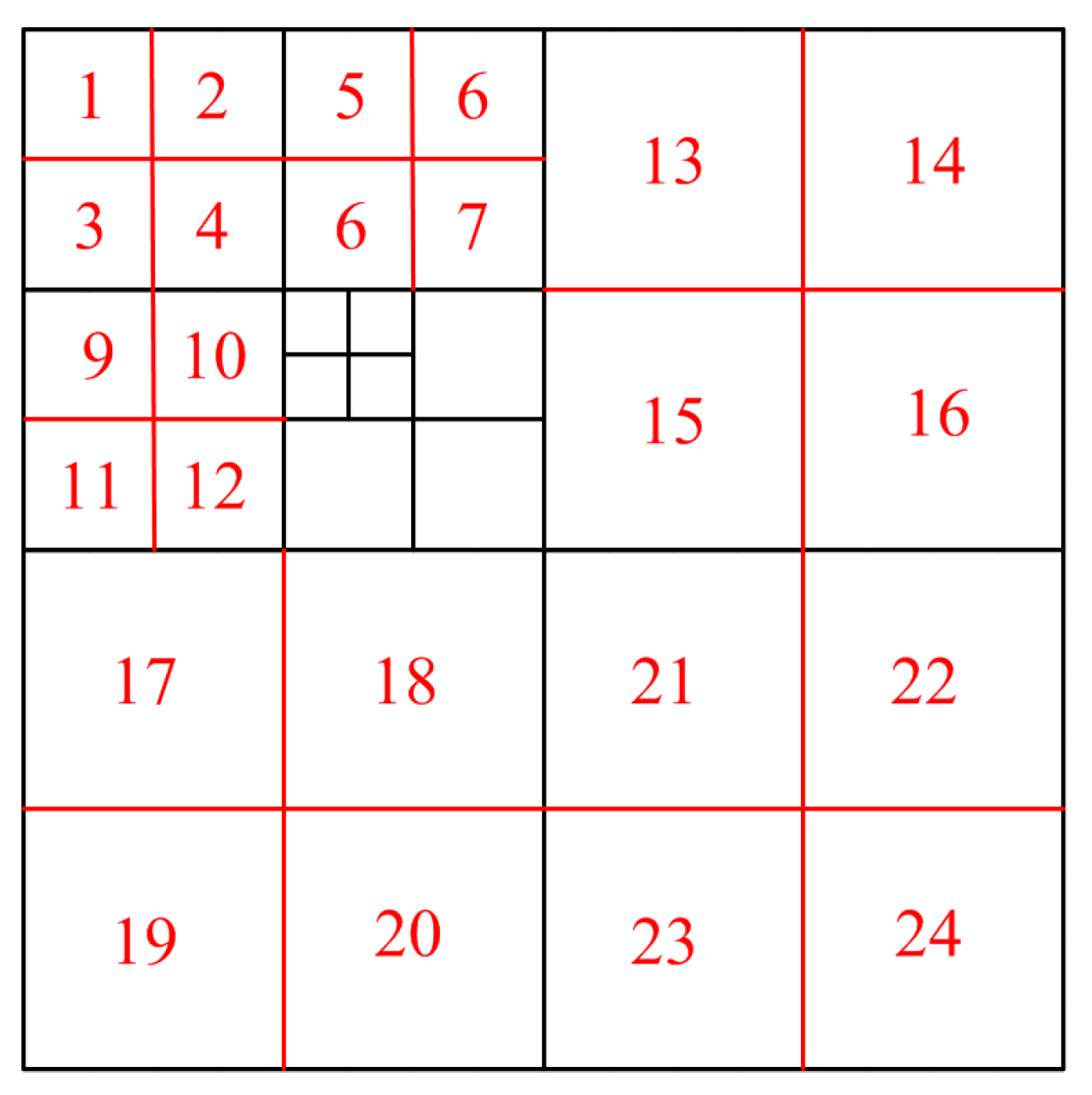
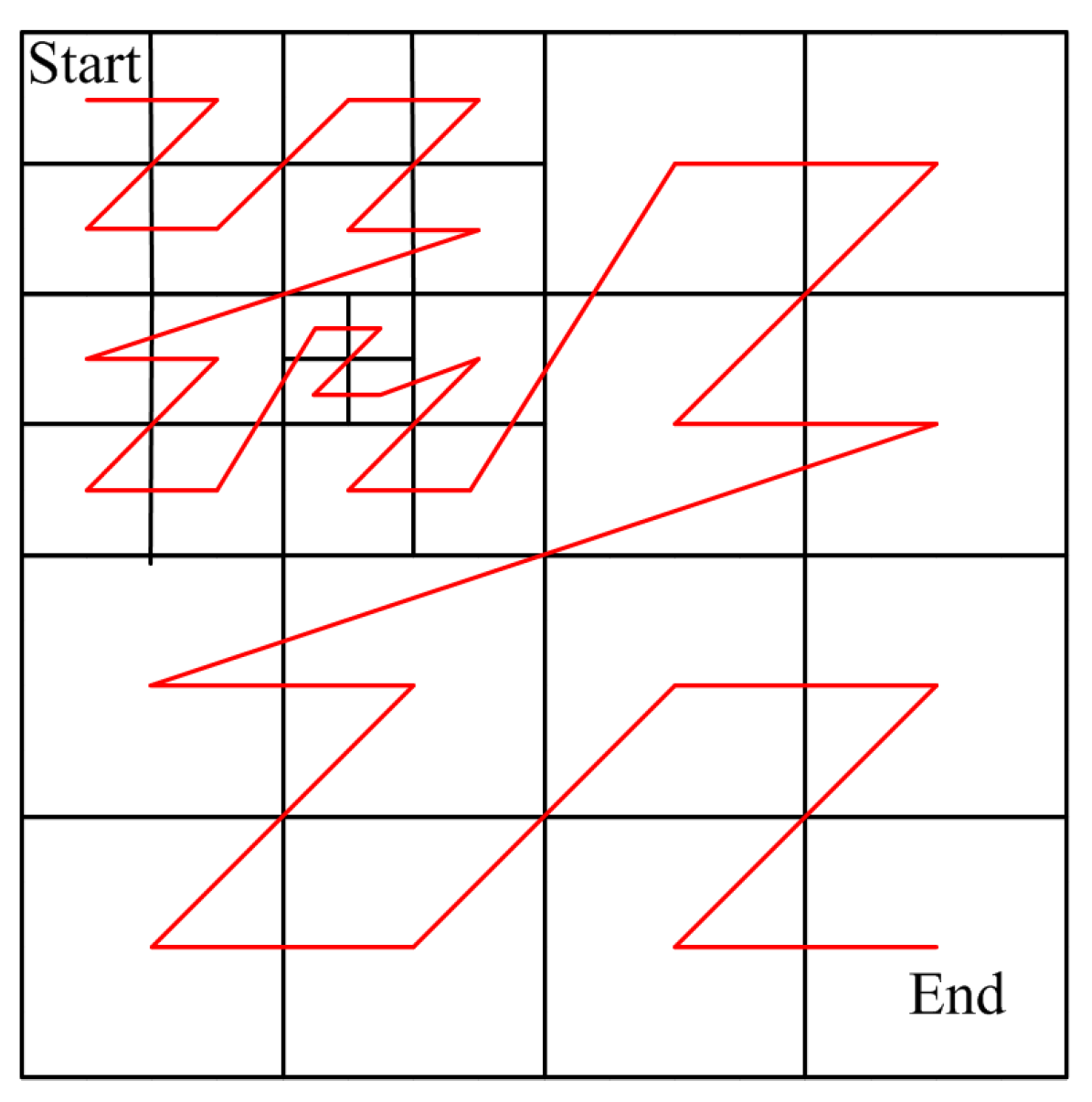
2.6. Z-Order Filling Curve
| Algorithm 7 Z-ordering () |
| travel to the bottom NE cells as a start point; store the travel path layer by layer simultaneously; while the number of tagged cells is not equal to the total number of leaf cells travel the leaf cells on the same layer under the sequence of NW→NE→SW→SE; store the travel path layer by layer simultaneously; go back to ancestor cell once the SE leaf cell is reached; end |
3. Difference Schemes on Nonuniform Mesh
4. Error Estimation
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mishra, P.C.; Rahnejat, H. 20-Tribology of big-end bearings. In Tribology and Dynamics of Engine and Powertrain; Rahnejat, H., Ed.; Woodhead Publishing: Sawston, UK, 2010; pp. 635–659. [Google Scholar]
- Manser, B.; Belaidi, I.; Hamrani, A.; Khelladi, S.; Bakir, F. Performance of hydrodynamic journal bearing under the combined influence of textured surface and journal misalignment: A numerical survey. C. R. Méc. 2019, 347, 141–165. [Google Scholar] [CrossRef]
- Tauviqirrahman, M.; Afif, M.F.; Paryanto, P.; Jamari, J.; Caesarendra, W. Investigation of the Tribological Performance of Heterogeneous Slip/No-Slip Journal Bearing Considering Thermo-Hydrodynamic Effects. Fluids 2021, 6, 48. [Google Scholar] [CrossRef]
- Miwa, R.; Miyanaga, N.; Tomioka, J. Appearance of Hysteresis Phenomena on Hydrodynamic Lubrication in a Seal-Type Thrust Bearing with Dimples. Materials 2021, 14, 5222. [Google Scholar] [CrossRef] [PubMed]
- Dowson, D.; Taylor, C.M. Cavitation in Bearings. Annu. Rev. Fluid Mech. 1979, 11, 35–65. [Google Scholar] [CrossRef]
- Sun, D.; Li, S.; Fei, C.; Ai, Y.; Liem, R.P. Investigation of the effect of cavitation and journal whirl on static and dynamic characteristics of journal bearing. J. Mech. Sci. Technol. 2019, 33, 77–86. [Google Scholar] [CrossRef]
- Shen, C.; Khonsari, M.M. On the Magnitude of Cavitation Pressure of Steady-State Lubrication. Tribol. Lett. 2013, 51, 153–160. [Google Scholar] [CrossRef]
- Cupillard, S.; Cervantes, M.; Glavatskih, S. A CFD study of a finite textured journal bearing. In Proceedings of the IAHR Symposium on Hydraulic Machinery and Systems, Foz do Iguaçu, Brazil, 27–31 October 2008. [Google Scholar]
- Cupillard, S.; Glavatskih, S.; Cervantes, M.J. Computational Fluid Dynamics Analysis of a Journal Bearing with Surface Texturing. Proc. Inst. Mech. Eng. Part. J. J. Eng. Tribol. 2008, 222, 97–107. [Google Scholar] [CrossRef]
- Brewe, D.E. Theoretical Modeling of the Vapor Cavitation in Dynamically Loaded Journal Bearings. J. Tribol. 1986, 108, 628–637. [Google Scholar] [CrossRef] [Green Version]
- Elrod, H.G. A Cavitation Algorithm. J. Lubr. Technol. 1981, 103, 350–354. [Google Scholar] [CrossRef]
- Jakobsson, B.; Floberg, L. The Finite Journal Bearing, Considering Vaporization. Trans. Chalmers Univ. Technol. 1957, 190. Available online: https://www.worldcat.org/title/finite-journal-bearing-considering-vaporization/oclc/718857301 (accessed on 5 August 2021).
- Olsson, K. Cavitation in Dynamically Loaded Bearings. Trans. Chalmers Univ. Technol. 1965, 308, 155–162. [Google Scholar]
- Gropper, D.; Wang, L.; Harvey, T.J. Hydrodynamic Lubrication of Textured Surfaces: A Review of Modeling Techniques and Key Findings. Tribol. Int. 2016, 94, 509–529. [Google Scholar] [CrossRef] [Green Version]
- Braun, M.J.; Hannon, W.M. Cavitation formation and modelling for fluid film bearings: A review. Proc. Inst. Mech. Eng. Part. J. J. Eng. Tribol. 2010, 224, 839–863. [Google Scholar] [CrossRef]
- Fesanghary, M.; Khonsari, M.M. A Modification of the Switch Function in the Elrod Cavitation Algorithm. J. Tribol. 2011, 133, 024501. [Google Scholar] [CrossRef]
- Nitzschke, S.; Woschke, E.; Schmicker, D.; Strackeljan, J. Regularised cavitation algorithm for use in transient rotordynamic analysis. Int. J. Mech. Sci. 2016, 113, 175–183. [Google Scholar] [CrossRef]
- Ausas, R.; Ragot, P.; Leiva, J.; Jai, M.; Bayada, G.; Buscaglia, G.C. The Impact of the Cavitation Model in the Analysis of Microtextured Lubricated Journal Bearings. J. Tribol. 2007, 129, 868–875. [Google Scholar] [CrossRef]
- Ausas, R.F.; Jai, M.; Buscaglia, G.C. A Mass-Conserving Algorithm for Dynamical Lubrication Problems With Cavitation. J. Tribol. 2009, 131, 031702. [Google Scholar] [CrossRef]
- Giacopini, M.; Fowell, M.T.; Dini, D.; Strozzi, A. A Mass-Conserving Complementarity Formulation to Study Lubricant Films in the Presence of Cavitation. J. Tribol. 2010, 132, 041702. [Google Scholar] [CrossRef]
- Woloszynski, T.; Podsiadlo, P.; Stachowiak, G.W. Efficient Solution to the Cavitation Problem in Hydrodynamic Lubrication. Tribol. Lett. 2015, 58, 18. [Google Scholar] [CrossRef]
- Qiu, Y.; Khonsari, M.M. On the Prediction of Cavitation in Dimples Using a Mass-Conservative Algorithm. ASME J. Tribol. 2009, 131, 041702. [Google Scholar] [CrossRef]
- Miraskari, M.; Hemmati, F.; Jalali, A.; Alqaradawi, M.Y.; Gadala, M.S. A Robust Modification to the Universal Cavitation Algorithm in Journal Bearings. J. Tribol. 2016, 139, 031703. [Google Scholar] [CrossRef]
- Berger, M.J.; Oliger, J. Adaptive mesh refinement for hyperbolic partial differential equations. J. Comput. Phys. 1984, 53, 484–512. [Google Scholar] [CrossRef]
- Stadler, G.; Gurnis, M.; Burstedde, C.; Wilcox, L.C.; Alisic, L.; Ghattas, O. The Dynamics of Plate Tectonics and Mantle Flow: From Local to Global Scales. Science 2010, 329, 1033–1038. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; King, S.D. A benchmark study of incompressible Stokes flow in a 3-D spherical shell using ASPECT. Geophys. J. Int. 2019, 217, 650–667. [Google Scholar] [CrossRef]
- Berger, M.J.; Colella, P. Local adaptive mesh refinement for shock hydrodynamics. J. Comput. Phys. 1989, 82, 64–84. [Google Scholar] [CrossRef] [Green Version]
- Waltz, J.; Bakosi, J. A coupled ALE–AMR method for shock hydrodynamics. Comput. Fluids 2018, 167, 359–371. [Google Scholar] [CrossRef]
- Mirzadeh, M.; Guittet, A.; Burstedde, C.; Gibou, F. Parallel level-set methods on adaptive tree-based grids. J. Comput. Phys. 2016, 322, 345–364. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Fakhari, A.; Li, J.; Luo, L.-S.; Qian, T. A comparative study of interface-conforming ALE-FE scheme and diffuse interface AMR-LB scheme for interfacial dynamics. J. Comput. Phys. 2019, 395, 602–619. [Google Scholar] [CrossRef]
- Dai, W.W. Issues in adaptive mesh refinement. In Proceedings of the 2010 IEEE International Symposium on Parallel & Distributed Processing, Workshops and Phd Forum (IPDPSW), Atlanta, GA, USA, 19–23 April 2010; pp. 1–8. [Google Scholar]
- Burstedde, C.; Wilcox, L.C.; Ghattas, O. p4est: Scalable algorithms for parallel adaptive mesh refinement on forests of octrees. SIAM J. Sci. Comput. 2011, 33, 1103–1133. [Google Scholar] [CrossRef] [Green Version]
- Angelo, A. A Brief Introduction to Quadtrees and Their Applications. In Proceedings of the Style file from the 28th Canadian Conference on Computational Geometry, Vancouver, BC, Canada, 3–5 August 2016. [Google Scholar]
- Samet, H. Neighbor finding techniques for images represented by quadtrees. Comput. Graph. Image Process. 1982, 18, 37–57. [Google Scholar] [CrossRef]
- David. Advanced Octrees 4: Finding neighbor nodes. Available online: https://geidav.wordpress.com/2017/12/02/advanced-octrees-4-finding-neighbor-nodes/ (accessed on 20 March 2021).
- Martin, D.F. Solving Poisson’s Equation Using Adaptive Mesh Refinement; Citeseer: University Park, PA, USA, 1996. [Google Scholar]
- Omran, S. Quadratic Equation Interpolation, MATLAB Central File Exchange. Retrieved. 2021. Available online: https://www.mathworks.com/matlabcentral/fileexchange/41298-quadratic-equation-interpolation (accessed on 14 April 2021).
- Popinet, S. A quadtree-adaptive multigrid solver for the Serre–Green–Naghdi equations. J. Comput. Phys. 2015, 302, 336–358. [Google Scholar] [CrossRef] [Green Version]
- Kilimci, P.; Kalipsiz, O. Indexing of spatiotemporal Data: A comparison between sweep and z-order space filling curves. In Proceedings of the International Conference on Information Society (i-Society 2011), London, UK, 27–29 June 2011; pp. 450–456. [Google Scholar]
- Phillips, T.S.; Roy, C.J. A New Extrapolation-Based Uncertainty Estimator for Computational Fluid Dynamics. J. Verif. Valid. Uncertain. Quantif. 2017, 1, 041006. [Google Scholar] [CrossRef]
- Phillips, T. Extrapolation-Based Discretization Error and Uncertainty Estimation in Computational Fluid Dynamics. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2012. [Google Scholar]
- Wahba, E.M. Non-systematic grid refinement procedures for computational fluid dynamics. Appl. Math. Comput. 2013, 225, 829–842. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Table Index | Cell Number | Cell Type | NW Child Cell | NE Child Cell | SW Child Cell | SE Child Cell | Parent Cell Number | Level | Other Parameters |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 2 | 3 | 4 | 5 | 0 | 1 | xy coordinate; refinement flag; coarse flag, and so on. |
| 2 | 2 | NW 1 | 6 | 7 | 8 | 9 | 1 | 2 | |
| 3 | 3 | NE | 0 | 0 | 0 | 0 | 1 | 2 | |
| 4 | 4 | SW | 0 | 0 | 0 | 0 | 1 | 2 | |
| … | |||||||||
| 10 | 10 | NW | 14 | 15 | 16 | 17 | 9 | 4 | |
| … | |||||||||
| 17 | 17 | SE | 0 | 0 | 0 | 0 | 10 | 5 | |
| Cell Number of the West Boundary | Pair Number | Cell Number of the East Boundary | Pair Number |
|---|---|---|---|
| 22 | 1 | 24 | 1 |
| 28 | 2 | 86 | 2 |
| 95 | 2 | 15 | 3 |
| 97 | 2 | ||
| 120 | 3 | ||
| 142 | 3 |
| Bearings | Refinement Level | Number of Tagged Cells for Pressure | Number of Tagged Cells for Density Ratio | Number of Cells Actually Refined (A) | Total Number of Cells before Refinement (B) | Refinement Ratio (A/B) |
|---|---|---|---|---|---|---|
| Case 1: journal bearing | 1 | 30 | 40 | 240 | 265 | 91% |
| 2 | 90 | 40 | 672 | 1024 | 65% | |
| 3 | 300 | 180 | 1664 | 4096 | 41% | |
| Case 2: thrust bearing | 1 | 30 | 40 | 252 | 265 | 95% |
| 2 | 150 | 60 | 776 | 1024 | 76% | |
| 3 | 350 | 180 | 1960 | 4096 | 48% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Li, K.; Geng, Z.; Zhang, M.; Yang, J. A Local Adaptive Mesh Refinement for JFO Cavitation Model on Cartesian Meshes. Appl. Sci. 2021, 11, 9879. https://doi.org/10.3390/app11219879
Xu W, Li K, Geng Z, Zhang M, Yang J. A Local Adaptive Mesh Refinement for JFO Cavitation Model on Cartesian Meshes. Applied Sciences. 2021; 11(21):9879. https://doi.org/10.3390/app11219879
Chicago/Turabian StyleXu, Wanjun, Kang Li, Zhengyang Geng, Mingjie Zhang, and Jiangang Yang. 2021. "A Local Adaptive Mesh Refinement for JFO Cavitation Model on Cartesian Meshes" Applied Sciences 11, no. 21: 9879. https://doi.org/10.3390/app11219879
APA StyleXu, W., Li, K., Geng, Z., Zhang, M., & Yang, J. (2021). A Local Adaptive Mesh Refinement for JFO Cavitation Model on Cartesian Meshes. Applied Sciences, 11(21), 9879. https://doi.org/10.3390/app11219879