Abstract
There are different devices to increase the strength capacity of people with walking problems. These devices can be classified into exoskeletons, orthotics, and braces. This review aims to identify the state of the art in the design of these medical devices, based on an analysis of patents and literature. However, there are some difficulties in processing the records due to the lack of filters and standardization in the names, generating discrepancies between the search engines, among others. Concerning the patents, 74 patents were analyzed using search engines such as Google Patents, Derwent, The Lens, Patentscope, and Espacenet over the past ten years. A bibliometric analysis was performed using 63 scientific reports from Web of Science and The Lens in the same period for scientific communications. The results show a trend to use the mechanical design of exoskeletons based on articulated rigid structures and elements that provide force to move the structure. These are generally two types: (a) elastic elements and (b) electromechanical elements. The United States accounts for 32% of the technological patents reviewed. The results suggest that the use of exoskeletons or orthoses customized to the users’ needs will continue to increase over the years due to the worldwide growth in disability, particularly related to mobility difficulties and technologies related to the combined use of springs and actuators.
1. Introduction
In recent decades, advances in the development of assistive devices have become relevant in medicine, especially in specific areas related to people’s disabilities, increasing its research and technological development. One of the main causes may be the worldwide increase in the population that suffers from a disability. According to the World Health Organization (WHO), more than 1000 million people live with some form of disability; almost 200 million suffer considerable difficulties in their functioning. These mobility difficulties are increased because of the aging of the population, and it will be a cause of more significant global concern than it is now [1].
In this context, the prevalence of disability is increasing, and Mexico does not escape this problem. According to data from the National Institute of Statistics and Geography (INEGI), 7% of the population suffers from a disability, and 42.4% of disabilities are related to mobility [2]. Another factor that affects the increase in the population with disabilities is related to obesity. According to the Organization for Economic Cooperation and Development (OECD) in its report “The Heavy Burden of Obesity: The Economics of Prevention”, about 73% of the Mexican population suffers from overweight, and 34% of people suffer from morbid obesity, which is the highest degree of obesity [3]. A great part of mobility problems occurs in the knee joint, which includes two degrees of freedom (DOF), flexion-extension (x-x) and internal–external (y-y). This knee joint works essentially in compression, supporting the weight of the body during the march [4] (see Figure 1). These characteristics of operating under the action of gravity make people who suffer from obesity more prone to suffer injuries to the knee joints and develop diseases such as osteoarthritis that occur more frequently with age [5,6].
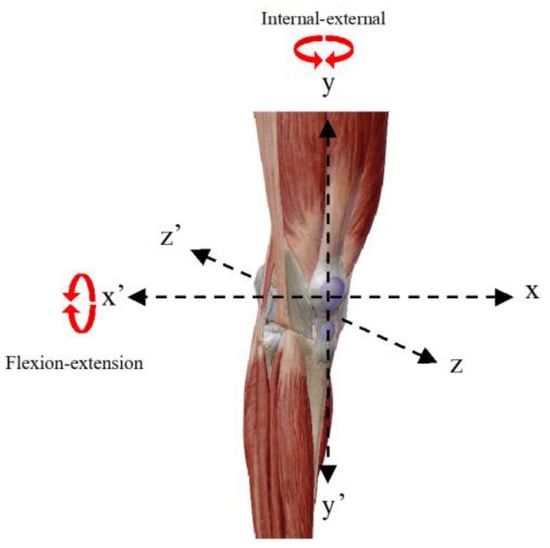
Figure 1.
Degrees of freedom of the knee joint.
The research and development of devices that provide solutions to mobility problems have increased in recent decades; such is the case of the development of exoskeletons, which have been a milestone in this area [7]. Exoskeletons can be grouped based on energy use into powered exoskeletons and passive exoskeletons [8]. Powered exoskeletons are systems based on an external energy source and actuators that convert electrical, pneumatic, or hydraulic energy to mechanical work to give support and controlled movement [9,10,11,12,13,14], whereby the rehabilitation tasks turn out to be more suitable and effective than traditional methods. However, a limitation of these exoskeletons is that patients do not have control of the trajectory, which challenges patients to train personalized or appropriate movement patterns for their recovery. Passive exoskeletons do not have an external power source, so their movement is dependent on the user. These exoskeletons consist of springs, shock absorbers, and mechanical clutches to store energy or release energy during walking [15]. They are cheaper, less complex, and are likely to be better accepted by users.
Herr (2009) classified exoskeletons and orthotics into four categories: (a) serial limb exoskeletons; (b) parallel limb exoskeletons for load transfer; (c) exoskeletons of parallel extremities to increase torque, and (d) exoskeletons of parallel extremities that increase human endurance. In the present review, the terms exoskeletons and orthotics are used similarly, as mechanical devices of an anthropomorphic nature [16].
This work presents the method used to find refined information obtained in databases for both patents and scientific communications. The results section presents the bibliometric analysis of the literature and the patentometric analysis of technological surveillance. Finally, the conclusions section shows the main metrics analyzed and the technology trend to boost strength capability.
2. Review Methodology
The search strategy was divided into two parts: (1) obtaining patents and (2) obtaining scientific communications, for which in both cases, the arrangement of keywords and Boolean operators were ((knee or (lower limb)) and (exoskeletons or orthoses)). We considered a 10-year search period, that is, from 2011 to 2020 as the first filter (Filter_1). Later, the data obtained were processed for analysis by applying three filters, which are detailed in Section 2.1 and Section 2.2.
2.1. Patent Search
Five search engines were used (Derwent Innovation, Espacenet, Google Patents, Patentscope, and The Lens), in which the arrangement of keywords and Boolean operators mentioned in the previous paragraph shows a growth in the patent registration of lower limb exoskeletons in the past decade (see Figure 2).
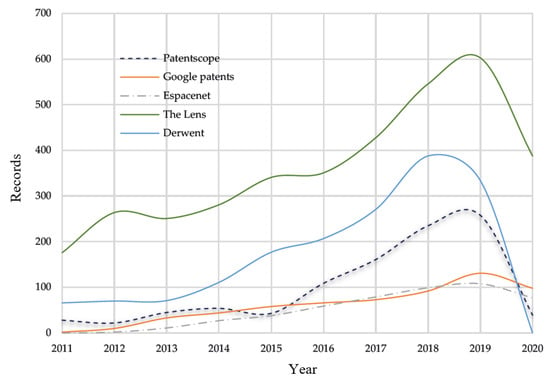
Figure 2.
Documents by year.
Subsequently, two other filters were used, denoted as Filter_2 and Filter_3, related to the international patent classification (IPC) A61H3/00 and A61F5/01. These patents belong to the group of non-surgical devices or appliances to help people walk. We applied the filters directly in the corresponding search engine, as the goal is to determine the status of the passive knee exoskeleton technique. Filter_3 has to do with the inclusion of the word knee. Finally, with the results of the databases, obtained after applying the three filters, a single record was integrated and “data cleaning” was performed using the Open Refine® free software. Later, we disaggregated the data and performed a manual review of each record, applying criteria to restrict and select patents of interest. This action constitutes Filter_4.
- Inclusion criteria:
- (a)
- The patent belongs to a type of lower limb exoskeleton or orthosis.
- (b)
- The patent corresponds to a component of an exoskeleton or lower limb orthosis.
- (c)
- The patent describes the design or manufacturing method of an exoskeleton or lower limb orthosis.
- (d)
- The patent can be registered in any patent office in any country.
- Exclusion criteria:
- (a)
- Related to other devices for members of the body other than the lower one.
- (b)
- Related to complementary systems not related to the knee joint.
- (c)
- Patents are found in more than one database; only the patent found in the first database was considered to avoid duplication of information.
- (d)
- Patents prior to 2011, considering slow progress in development and management.
This discrimination of the fourth filter (Filter_4) is made by adding all the documents obtained after Filter_3, resulting in 205 documents to which the inclusion and exclusion criteria were applied, leaving only 74 documents identified with the data of the inventor, registry office, year of publication, patent title, and registration key. Table 1 shows the effect of reducing the records when applying each filter.

Table 1.
Results of the patent search.
2.2. Search of Scientific Communications
For the analysis of the literature, two search engines (Web of Science and The Lens) were used, in which the disposition of keywords and Boolean operators were applied, as well as the time period of 10 years as the filter (Filter_1). The number articles per year is shown in Figure 3, where a growing trend is observed in the case of the Web of Science (WoS) search engine over the entire time series, but not in the case of the data obtained with the search engine The Lens, where a clear trend is not appreciated; this may be due to the unified system of the search engine that gathers patents and academic documents in a database with the ability to identify intersections between these two types of documents.
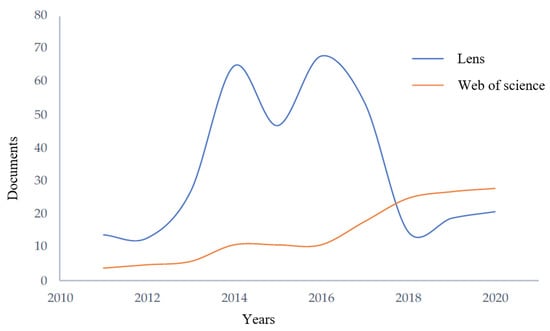
Figure 3.
Annual production of articles found by two databases.
With the data obtained from each search engine, the results of both were crossed, applying a second filter (Filter_2) using inclusion and exclusion criteria to restrict and select information on the topic:
- Inclusion criteria:
- (a)
- Related to the design of exoskeletons.
- (b)
- Related to the type of exoskeletons and orthoses focused on the type of application.
- (c)
- Related to tests and evaluation metrics of exoskeletons or orthoses.
- (d)
- Related to the exoskeletons of the lower limb or knee joint.
- (e)
- Related to the development of exoskeletons or orthoses.
- (f)
- Exoskeleton manufacturing methods.
- Exclusion criteria:
- (a)
- Related to upper limb exoskeletons.
- (b)
- Related to active or powered exoskeletons.
- (c)
- Related to gait control.
- (d)
- Related to electromyography (EMG)
- (e)
- Duplicate registration.
- (f)
- Articles prior to 2011.
Table 2 shows the reduction effect of the records when applying the inclusion and exclusion criteria. A total of 63 records were obtained performing the bibliometric analysis using R-Studio® and Bibliometrix.
Table 2.
Number of documents obtained from search engines.
3. Results
3.1. Patentometric Analysis
After filtering the documents, 74 patents related to exoskeletons, orthoses, or lower limb devices were selected; the results are shown in Table 3. The main offices from where patents were registered are the United States (23 patents), the European office (4 patents), the international office (23 patents), China (18 patents), Japan (3 patents), Republic of Korea (2 patents), and Canada (1 patent). As shown in Figure 4, the United States is the country with the highest number of patents.
Table 3.
Lower limb exoskeletons and orthoses patents.
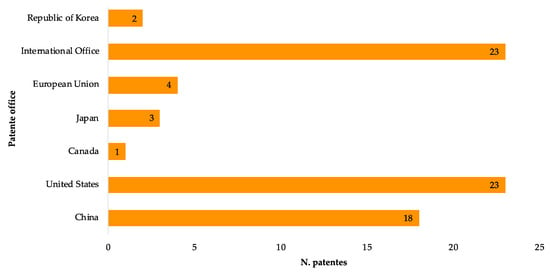
Figure 4.
Patents by each patent office.
Applicants and inventors in the databases were considered. The Beijing Institute of Technology and Otto Bock Healthcare Gumbo are the main applicants, with four and three patents, respectively, from 2011 to 2020. In Figure 5, the main applicants for exoskeletons and orthosis are shown.
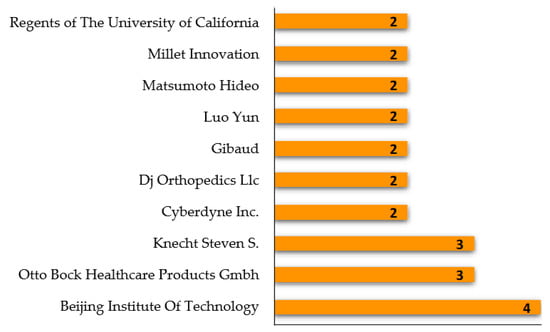
Figure 5.
Top patent applicants for exoskeletons and orthosis.
In the analysis of the patents, we found that 59 documents are related to devices for the knee joint and 15 documents are related to devices for two or more joints in the lower limb, as can be seen in Figure 6.
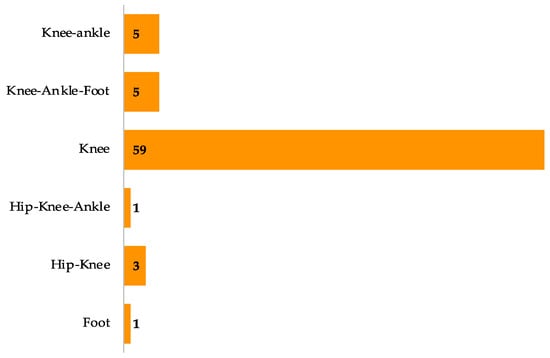
Figure 6.
Documents by lower limb joint.
Among the 74 results obtained, 29 results match with orthoses, 16 with braces, 14 with exoskeletons, 7 with devices, 2 with mechanisms, and 1 with exo-suit and prostheses. In addition, three results are associated with methodologies (manufacturing methods, design methods, tests). Figure 7 shows the resulting patents and the distribution with the part of the body of the lower limb that they cover.
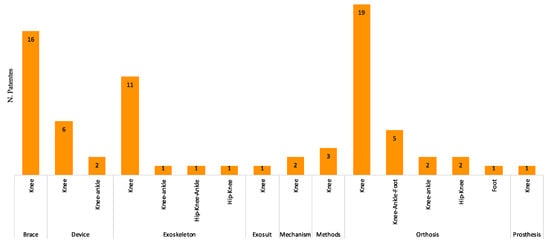
Figure 7.
Description of the patents and main coverage.
From the patent data, 59 refer to patents related only to the knee joint. In 45 patents, their predominant technology is mechanical, using cams, hinges, pivoting arms, elastic bands, springs, and springs as the main elements to carry out the mobility of the joint. In 11 patents, the predominant technology is electromechanical–electronic using actuators, servomotors, motors, and a combination of motor–spring with which they carry out the movement of the device. For three patents, the technology used is pneumatic, in which the movement of the devices is made using soft elements. Table 3 shows the selected patents, the technology used, the type of device, and the part of the lower limb that they cover. Figure 8 shows the technology used in the patents and the main elements with which they carry out the mobility of the device.
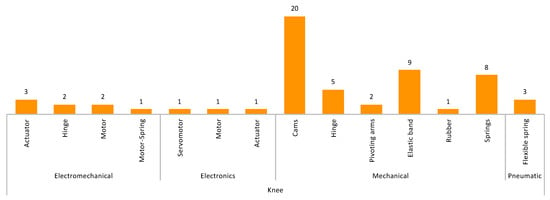
Figure 8.
Type of technology used in the knee joint.
3.2. Scientometric Analysis
The following keywords were analyzed: lower limb (frequency = 12 articles), exoskeleton (frequency = 11 articles), knee (frequency = 9 articles), control (frequency = 5 articles), design (frequency = 4 articles), rehabilitation (frequency = 4 articles), passive (frequency = 4 articles), joint (frequency = 3 articles), gait (frequency = 3 articles), orthosis (frequency = 2 articles), development (frequency = 2 articles), powered (frequency = 2 articles), and assistance (frequency = 2 articles) (see Figure 9). From the information obtained by the scientific documents, the characteristics of study subjects were as follows: average weight of 75 kg, a knee torque corresponding to 95–150 Nm, and the power in the knee between 50–235 Watts in the movement of flexion and extension.
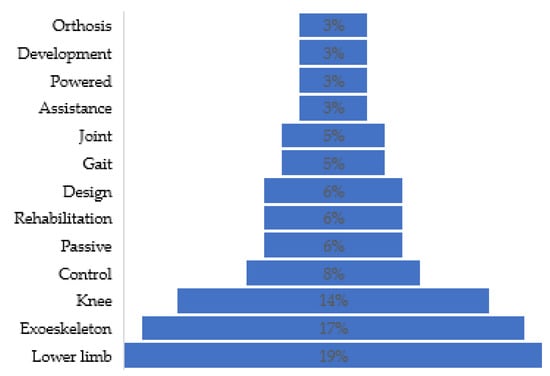
Figure 9.
Main keywords found in scientific documents.
Regarding the authors, we find that Mohammed S. is the main author (six articles); however, Meng W. is the most cited author in this field (see Table 4 and Figure 10).
Table 4.
Top authors’ production over time.
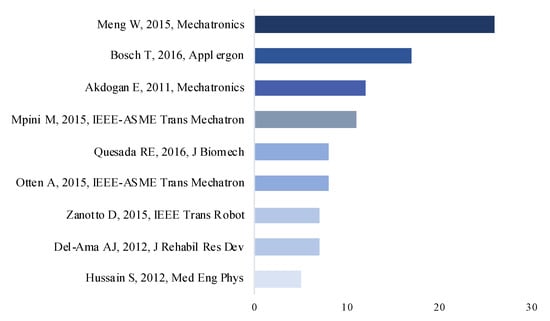
Figure 10.
Most cited documents.
The United States is the most productive country (14 documents), followed by the United Kingdom (13 documents) and China (7 documents) (see Figure 11).
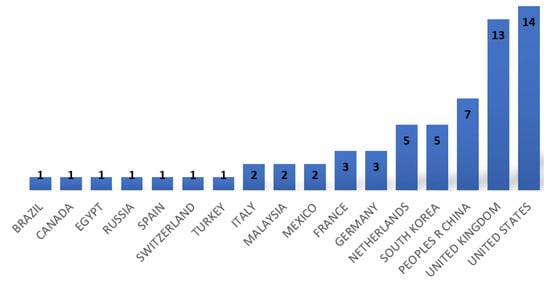
Figure 11.
The most productive countries in developing exoskeletons for the knee joint.
Table 5 shows the selected articles, used in the scientometric analysis used, results of the databases and selection criteria.
Table 5.
Articles analyzed about knee exoskeletons.
4. Discussion
In this review of 74 patents and 63 scientific articles, different designs were used to find similarities to guide and facilitate new proposals that may arise in the future. We conclude that using a regulated and slender structure forms the basis of the construction of the exoskeleton design for the knee joint, generally identifying two types of movement: (a) rotation, which achieves flexion and extension of the knee, and (b) rotation and translation, which reproduce more naturally the articular movement of the knee. The design can be scaled to active or passive exoskeletons depending on the force element that is used, and the number of joints of the lower limb that can be included can be expanded.
On the other hand, the number of records per database does not reflect the effectiveness of each search engine. For this research, priority was given to those who provided useful data, such as direct links to patents, the inventor’s name, and IPC codes. However, there are some difficulties in processing the records due to the lack of options to filter results or IPC categories. Moreover, some applicants may be included in the name of their companies. This is because some search engines only show the name of the applicant or owner rather than the inventor. In some cases, there is a lack of coherence between the names of the authors in different patents (for example, Chen shuyan and Shuyan, C.). These kinds of inconsistencies were grouped together, but still, the results could not be entirely accurate; the significance of this error does not affect the classification of every system.
This work is helpful to researchers and developers concerned with making proposals more functional to patients and therapists. The patients can know in detail the solutions existent in the market and increase confidence in the kind of device they are using or intend to use, comprehending its operating features, which help to assimilation and adopt medical technology.
4.1. Structural Support Elements
Based on the selected patents and scientific documentation, it is observed that the design of exoskeletons or knee orthoses consists of a rigid structure that is fixed to the side of the joint attached to the leg by means of elastic bands or straps. This structure can be one or two in parallel, embracing the knee joint from the sides, constituting the main structure in the design. Generally, it is made up of three parts: an upper part that is fixed to the leg above the knee, a lower part fixed below the knee, and a joint axis that allows flexion and extension of the mechanical structure of the exoskeleton (see Figure 12).
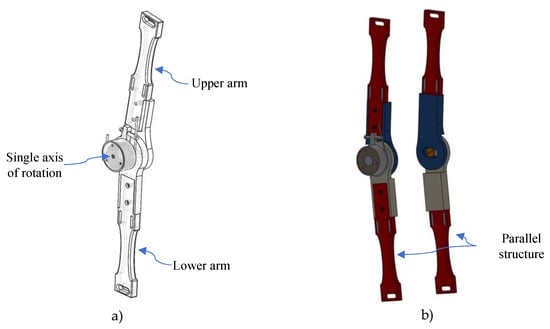
Figure 12.
Basic governed structure of attached exoskeleton: (a) one-sided; (b) two-sided.
4.2. Union Types
In patents and research articles, we find two different designs in the joint. The first kind of design allows the flexion and extension of the exoskeleton structure through a hinge with a single axis of rotation in the simplest and most generalized way. It provides the exoskeleton with a movement of a degree of freedom. The second is the union through a mobile axis, which is achieved in three ways: pivoting arms, cams, and polycentric pulleys, providing the exoskeleton with two degrees of freedom due to the linear displacement during the rotation that occurs when the axis moves during rotation (see Figure 13).
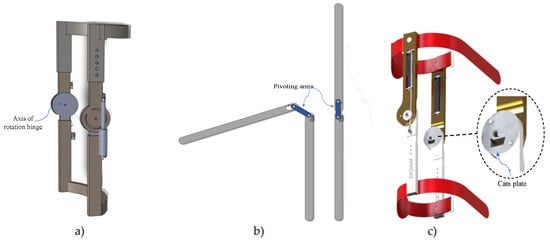
Figure 13.
Type of union: (a) hinge; (b) pivoting arms; (c) cam.
4.3. Types of Force Elements Used
The two variants in the design of the exoskeleton structure are the basis for building active or passive knee exoskeletons. In the first case, actuators (pneumatic/electric) are added to the structure that provides the force for bending and joint extension; the basic structure is generally with a fixed axis. The second case is by means of springs, cams, or elastic elements that are added to the design to store and release the energy obtained from the march; the structure can be of a fixed or mobile axis (see Figure 14).
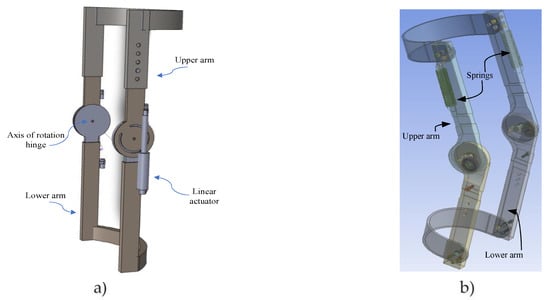
Figure 14.
Type force element used: (a) active (actuator); (b) passive (springs).
From the documents (patent and research articles), we can determine that the designs, on average, have a range of mobility of the structure from 0 to 120 degrees, and the actuators, on average, provide a torque of 95 to 150 Nm and power from 50 to 235 watts. On average, when it comes to the use of springs, they generate a force of approximately 85 N.
5. Conclusions
Exoskeletons and knee orthoses are rigid structures articulated with one or more degrees of freedom, to which elements that provide force on the structure are attached. In principle, they are of two types: (a) elastic components such as springs or bands, that when deformed, store energy to later release it, and (b) electromechanical components, which are generally based on electric motors that transform electrical energy into mechanical energy. There are design proposals where the force is provided by a soft element actuated pneumatically.
Although in principle, the technologies used remain the same, the trend in the design of exoskeletons customized to the needs of users has led to the development of lighter components and the combination of elastic elements with electromechanical elements, generating semi-active designs which are more versatile. This review shows that the United States is the country with the highest number of patents and scientific documents related to exoskeletons, orthopedic devices, and knee devices. Therefore, some designs could have been left out of this investigation.
The contribution of these results focuses on knowing, especially among therapists and patients, the usefulness of classifying the knee exoskeletons and their relationship with energy expenditure and comparative energy cost and gait efficiency. In addition, this work contributes to the formulation of the design presented in Section 4.1, Section 4.2 and Section 4.3 as a topology optimization for new knee orthoses.
Author Contributions
J.R.M.-G. developed the practical aspects of this research; L.A.Z.-A. provided original schematic, exhaustive work on reviewing and editing, and supervised this research; A.H.V.-G. and J.C.Á.-V. reviewed, edited, and corrected this document. All authors have read and agreed to the published version of the manuscript.
Funding
The present article uses free software except for Derwent analytics for the patent analysis, provided by the Autonomous University of Mexico State. This research was funded by CONACYT (Consejo Nacional de Ciencia y Tecnología) (grant number 1009754).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- World Health Organization. Disability and Health. Available online: https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed on 13 August 2021).
- INEGI. La Discapacidad en México; Version 2017; INEGI: Aguascalientes, Mexico, 2014; p. 365. [Google Scholar]
- OECD. The Heavy Burden of Obesity: The Economics of Prevention; OECD: Paris, France, 2019. [Google Scholar] [CrossRef]
- Kapandji, A.I. Fisiologia articular/miembros inferiores/lower limb. Med. Panameri 2010, 2, 400. [Google Scholar]
- Ibarra, L.G.; Segura, V.H.; Chávez, D.D. Las enfermedades y traumatismos del sistema músculo esquelético. In Un Análisis del Instituto Nacional de Rehabilitación de México, Como Base Para su Clasificación y Prevención; Secretaría de Salud: Salud, Mexico, 2013; p. 147. [Google Scholar]
- National Institute of Arthritis and Musculoskeletal and Skin Diseases. What Causes Osteoarthritis, Symptoms & More; NIH: Bethesda, MD, USA, 2019. Available online: https://www.niams.nih.gov/health-topics/osteoarthritis#tab-causes (accessed on 15 February 2021).
- Chen, B.; Ma, H.; Qin, L.-Y.; Gao, F.; Chan, K.-M.; Law, S.-W.; Qin, L.; Liao, W.-H. Recent developments and challenges of lower extremity exoskeletons. J. Orthop. Transl. 2016, 5, 26–37. [Google Scholar] [CrossRef]
- Lovrenovic, Z.; Doumit, M. Review and analysis of recent development of lower extremity exoskeletons for walking assist. In Proceedings of the IEEE EMBS International Student Conference (ISC), Ottawa, ON, Canada, 29–31 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Kolakowsky-Hayner, S.A. Safety and Feasibility of using the EksoTM Bionic Exoskeleton to Aid Ambulation after Spinal Cord Injury. Spinal Cord Inj. 2013, 4, 3. [Google Scholar] [CrossRef]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk TM exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [PubMed]
- Farris, R.J.; Quintero, H.A.; Goldfarb, M. Preliminary Evaluation of a Powered Lower Limb Orthosis to Aid Walking in Paraplegic Individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 652–659. [Google Scholar] [CrossRef]
- Kilicarslan, A.; Prasad, S.; Grossman, R.G.; Contreras-Vidal, J.L. High accuracy decoding of user intentions using EEG to control a lower-body exoskeleton. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 5606–5609. [Google Scholar] [CrossRef]
- Kazerooni, H.; Steger, R. The Berkeley Lower Extremity Exoskeleton. J. Dyn. Syst. Meas. Control 2006, 128, 14–25. [Google Scholar] [CrossRef]
- Pratt, J.; Krupp, B.; Morse, C.; Collins, S. The RoboKnee: An exoskeleton for enhancing strength and endurance during walking. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’ 04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 3, pp. 2430–2435. [Google Scholar] [CrossRef]
- Aliman, N.; Ramli, R.; Haris, S.M. Design and development of lower limb exoskeletons: A survey. Robot. Auton. Syst. 2017, 95, 102–116. [Google Scholar] [CrossRef]
- Herr, H. Exoskeletons and orthoses: Classification, design challenges and future directions. J. NeuroEng. Rehabil. 2009, 6, 21. [Google Scholar] [CrossRef]
- Nathanson, J.J. Knee Brace Hinges with Adaptive Motion. CA2550027A1, 2005. Available online: https://patents.google.com/patent/CA2550027A1/en (accessed on 23 February 2021).
- Li, J.; Liu, J.; Wang, Y.; Wang, L. Control Orthosis Knee Joint Hinge during Stance. GB Patent CN103006362A, 2013. Available online: https://patents.google.com/patent/CN103006362A/en?oq=CN103006362A (accessed on 23 April 2021).
- Long, Y.; Zhou, S. Stretching Assisting Orthosis of Knee Joints. GB Patent CN104970908A, 14 October 2015. [Google Scholar]
- Sun, T.; Fang, L.; Zhang, R.; Deng, X.; Hu, J. Knee-Powered Radian Pulley-Type Foot Drop and Hemiplegic Gait Orthosis. GB Patent CN105997320A, 12 October 2016. [Google Scholar]
- Lin, X.; Deng, Q.; Yin, Z.; Qiu, J.; Chen, Y.; Zhou, C. Unlocking Adaptive Exoskeleton Knee Joint Support Plate. GB Patent CN106074094A, 9 November 2016. [Google Scholar]
- Chen, Z.; Wu, Y. Knee Joint Load-Bearing Power Assisting Exoskeleton Device and Working Method Thereof. GB Patent CN106361541A, 1 February 2017. [Google Scholar]
- Zhang, L.; Huang, Q.; Wang, W.; Wang, Z. Gait-Based Wearable Flexible Knee Joint Robot Exoskeleton Facility. GB Patent CN106420279A, 22 February 2017. [Google Scholar]
- Huang, Q.; Zhang, L. Self-Driven Self-Adaption Gait Wearable Knee Joint Walking Aid Device. GB Patent CN106491317A, 15 March 2017. [Google Scholar]
- Chen, S.; Zhao, J.; Wang, M.; Ye, X. Hip and Knee Integrated Joint Device Used for Exoskeleton Robot and Exoskeleton Robot. GB Patent CN106726362A, 31 May 2017. [Google Scholar]
- Fu, C.; Chang, Y.; Wang, W. Quasi-Passive Knee Joint and Ankle Joint Coupling Lower Limb Exoskeleton and Control Method Thereof. GB Patent CN107126348A, 5 September 2017. [Google Scholar]
- Hu, B.; Tan, W.; Lv, H.; Yu, H.; Yu, H. Lower Limb Exoskeleton Knee Joint Based on Torsional Spring Clutch. GB Patent CN107928995A, 20 April 2018. [Google Scholar]
- Xu, G.; Fu, S.; Wang, J.; Yang, P.; Zou, H.; Wang, L.; Ren, D.; Wang, Q.; Li, Y. Intelligent Knee Osteoarthritis Correction Integrated Instrument. GB Patent CN108852584A, 23 November 2018. [Google Scholar]
- Shufeng, T.; Jianguo, C.; Zirui, G.; Wei, L.; Xiangpeng, L. A Knee Joint Exoskeleton Mechanism Driven by a Connecting Rod. GB Patent CN109199799A, 15 January 2019. [Google Scholar]
- Gu, S.; Ru, C.; Zhu, J.; Wang, Y. Lower Limb Knee Joint and Ankle Joint Assisting Exoskeleton Stiffness Adjusting Device. GB Patent CN109276412A, 29 January 2019. [Google Scholar]
- Chen, C. Lower Extremity Exoskeleton Heterogeneous Knee Joint Based on Parallel Elastomer. GB Patent CN109528453A, 29 March 2019. [Google Scholar]
- Guo, K.; Zhang, M.; Zhong, B. Lower Limb Exoskeleton Structure Integrated with Self-Adaptive Knee Joints and Robot. GB Patent CN109620653A, 16 April 2019. [Google Scholar]
- Cui, G.; Zhang, J.; Liu, X.; Li, K.; Zhao, X.; Zhu, L. Wearable Lower-Limb Walking-Assisting Exoskeleton Capable of Imitating Movement Curve of Human Knee Joint. GB Patent CN110464606A, 19 November 2019. [Google Scholar]
- Chen, H.; Xie, D.; Qi, J.; Zhu, X.; Wang, H.; Ma, B.; Zhang, T.; Jia, Y. Knee Joint Orthosis. GB Patent CN110623781A, 31 December 2019. [Google Scholar]
- Li, B.; Yang, Y.; Zhao, H.; Ma, X.; Zhao, X.; Liu, Z. Self-Adaptive Variable-Stiffness In-Vitro Knee Joint Device with Intelligent Tensioning Function. GB Patent CN111110520A, 8 May 2020. [Google Scholar]
- Auberger, R. Knee Orthosis. EU Patent EP2276433A2, 26 January 2011. [Google Scholar]
- Frass, A.; Wayd, K.; Grafinger, J. Joint for Knee Orthotics, Prosthetics and Supports. EU Patent EP2524672B1, 10 April 2019. [Google Scholar]
- Anglada, G.; Girard, F. Device for Holding the Kneecap and Knee Orthosis. EU Patent EP2914217A1, 9 September 2015. [Google Scholar]
- Millet, D. Knee Orthosis Adapted for a Prolonged Sitting Position. EU Patent EP3503853A1, 3 July 2019. [Google Scholar]
- Ninomiya, M. Single Bar Knee-Ankle-Foot Orthosis. Japan Patent JP2014113312A, 26 June 2014. [Google Scholar]
- Amari, T. Knee Joint Mechanism of Movement Assist Device. Japan Patent JP2018171142A, 8 November 2018. [Google Scholar]
- Bryan, K.B.; Jeffrey, T.M.; Russell, S.M. Knee Brace. Japan Patent JP2019058796A, 18 April 2019. [Google Scholar]
- Han, G.B.; Kim, C.W. Reciprocal Action Type Knee Brace by Different Movement in Medial-Lateral Hinge. Korea Patent KR101418833B1, 17 July 2014. [Google Scholar]
- Kim, J.G. Auxiliary Apparatus for Bracing Knee. Korea Patent KR20200052678A, 15 May 2020. [Google Scholar]
- Nelson, R. Self-Adjusting Knee Brace. U.S. Patent US20040176715A1, 9 September 2004. Available online: https://patents.google.com/patent/US20040176715A1/en?oq=US2004176715A1 (accessed on 13 February 2021).
- Schofield, J.S. Knee Ankle Foot Orthosis. U.S. Patent US20130245524A1, 15 March 2013. Available online: https://patents.google.com/patent/US20130245524A1/en?oq=US2013245524A1 (accessed on 23 February 2021).
- Campbell, J.H.; Shamoun, M.C.; Gallagher, M.; Zalinski, N.C. Orthotic Joint and Knee-Ankle-Foot Orthotic Device Incorporating Same. U.S. Patent US20130296754A1, 7 November 2013. Available online: https://patents.google.com/patent/US20130296754A1/en?oq=US2013296754A1 (accessed on 23 February 2021).
- Leos, A.N.; Matthews, K.C. Orthotic System and Method Utilizing Hydrostatic Compression of Soft Tissue to Unload the Knee and/or Heel up to 100%. U.S. Patent US2014276303A1, 18 September 2014. [Google Scholar]
- Knecht, S.S. Knee Brace with Adjustable Bolster. U.S. Patent US20140323937A1, 30 October 2014. Available online: https://patents.google.com/patent/US20140323937A1/en?oq=US2014323937A1 (accessed on 23 February 2021).
- Cortanze, A.D.; Lecurieux-Clerville, R. Active Knee Orthosis. U.S. Patent US20140336553A1, 13 November 2014. Available online: https://patents.google.com/patent/US20140336553A1/en?oq=US2014336553A1 (accessed on 23 February 2021).
- Audu, M.L.; Triolo, R.J.; Kobetic, R.; To, C.S.; Bulea, T.C.; Quinn, R.D.; Nandor, M. Power Assisted Orthosis with Hip-Knee Synergy. U.S. Patent US2014358053A1, 4 December 2014. [Google Scholar]
- Knecht, S.S. Knee Brace with Tool Less Length Adjuster. U.S. Patent US20140364782A1, 11 December 2014. Available online: https://patents.google.com/patent/US20140364782A1/en?oq=US2014364782A1 (accessed on 23 February 2021).
- DeSousa, E.J.-J. Dynamic Load Bearing Shock Absorbing Exoskeletal Knee Brace. U.S. Patent US20140364783A1, 11 December 2014. Available online: https://patents.google.com/patent/US20140364783A1/en?oq=US2014364783A1 (accessed on 23 February 2021).
- Eschbach, M.; Kazerounian, K.; Huber, M.; Ilies, H. Knee Orthosis Device and Associated Methods. U.S. Patent US2015005686A1, 1 January 2015. [Google Scholar]
- Koga, H.; Matsuo, K. Knee Joint Supporter. U.S. Patent US2015209170A1, 30 July 2015. [Google Scholar]
- Auberger, R.; James, K.B. Method for Controlling a Knee Orthosis. U.S. Patent US20150230962A1, 20 August 2015. Available online: https://patents.google.com/patent/US20150230962A1/en?oq=US2015230962A1 (accessed on 23 February 2021).
- Nace, R.A. Knee Orthosis for Treatment of PCL Injury. U.S. Patent US2015290010A1, 15 October 2015. [Google Scholar]
- Ramirez, C. Artificial Knee Joint. U.S. Patent US20160287423A1, 6 October 2016. Available online: https://patents.google.com/patent/US20160287423A1/en?oq=US2016287423A1 (accessed on 23 February 2021).
- Mc Dermott, A.; Costello, M.; French III, C.J.; Hodge, G.S.; Ledwith, B.; Parker, K.L.; Zufelt, N. Adjustable Knee Brace. U.S. Patent US2017000639A1, 5 January 2017. [Google Scholar]
- Humphrey, J.C. Orthopedic Knee Brace. U.S. Patent US20180055673A1, 1 March 2018. Available online: https://patents.google.com/patent/US20180055673A1/en?oq=US2018055673A1 (accessed on 23 February 2021).
- Seifert, D. Method for Controlling an Artificial Knee Joint. U.S. Patent US20180133029A1, 17 May 2018. Available online: https://patents.google.com/patent/US20180133029A1/en?oq=US2018133029A1 (accessed on 23 February 2021).
- Polygerinos, P.; Sridar, S.; Maruyama, T.; St. Clair, C.; Kwasnica, C. Soft Inflatable Exosuit for Knee Rehabilitation. U.S. Patent US20190029914A1, 31 January 2019. Available online: https://patents.google.com/patent/US20190029914A1/en?oq=US2019029914A1 (accessed on 23 February 2021).
- Sankai, Y. Knee Joint Orthotic Device Manufacturing Apparatus and Knee Joint Treatment Support Apparatus and Knee Joint Treatment Support Method. U.S. Patent US2019209357A1, 11 July 2019. [Google Scholar]
- Huang, Q.; Zhang, L. Unpowered Wearable Walking Assistance Knee Equipment with Gait Self-Adaptivity. U.S. Patent US2019282430A1, 19 September 2019. [Google Scholar]
- Huang, Q.; Zhang, L.; Wang, W. Soft Knee Exoskeleton Driven by Negative-Pressure Linear Actuator. U.S. Patent US2020206064A1, 2 July 2020. [Google Scholar]
- Adachi, Y.; Fujita, Y.; Tsuboyama, T.; Ichihashi, N.; Ohata, K. Actuator Unit for Knee-Ankle-Foot Orthosis. U.S. Patent US2020069505A1, 5 March 2020. [Google Scholar]
- Angold, R.; Zoss, A.B.; Burns, J.W.; Harding, N.H. Hip and Knee Actuation Systems for Lower Limb Orthotic Devices. U.S. Patent US9011354B2, 21 April 2015. Available online: https://patents.google.com/patent/US9011354/en (accessed on 23 February 2021).
- Colaco, G.; Hunter, D.; Stamenovic, D. Knee Brace with Expandable Members and Method of Using the Same. International Patent WO2009012458A1, 22 January 2009. [Google Scholar]
- Hyun, D.J.; Kazerooni, H.; Tung, W.; Mckinley, S. Controllable Passive Artificial Knee. International Patent WO2014039134A1, 13 March 2014. [Google Scholar]
- Cappa, P.; Patané, F.; Rossi, S.; Castelli, E.; Petrarca, M. Ankle and Knee Motorized Orthosis. International Patent WO2014072883A1, 15 May 2014. [Google Scholar]
- Knecht, S.S. Dynamic Force Hinge Joint for Knee Brace and Knee Brace Equipped Therewith. International Patent WO2014143518A1, 18 September 2014. [Google Scholar]
- Gan, Y.; Luo, Y.; Xu, M. Knee Joint Orthosis Having Offloading Function. International Patent WO2015018340A1, 12 February 2015. [Google Scholar]
- Gan, Y.; Luo, Y. Knee Joint Orthosis. International Patent WO2016004855A1, 14 January 2016. [Google Scholar]
- Matsumoto, H.; Sakima, T. Knee Joint Orthosis. International Patent WO2016013039A1, 28 January 2016. [Google Scholar]
- Seligman, S. Low Profile Knee Brace and Method of Using Same. International Patent WO2016029048A3, 2 June 2016. [Google Scholar]
- Ho, S.K.; Tong, K.-Y.; Ockenfeld, C.U.; Yeung, L.F.; Wai, H.-W.; Pang, M.-K. Interactive Exoskeleton Robotic Knee System. International Patent WO2016180074A1, 17 November 2016. [Google Scholar]
- Kazerooni, H.; Wu, S.-L. Passive Power-Conservative Artificial Knee. International Patent WO2016210121A1, 29 December 2016. [Google Scholar]
- Kawaguchi, T.; Yasui, T.; Yamamoto, S. Knee Joint Control Method and Lower Extremity Orthosis. International Patent WO2017017809A1, 2 February 2017. [Google Scholar]
- Chang, K.Y. Knee Retractor. International Patent WO2017026668A1, 16 February 2017. [Google Scholar]
- Matsumoto, H.; Sakima, T. Knee Joint Brace. International Patent WO2017043515A1, 16 March 2017. [Google Scholar]
- Garrish, R. Stabilizing System for a Knee Brace. International Patent WO2017059518A1, 13 April 2017. [Google Scholar]
- Higashi, Y.; Takahashi, R.; Sawada, Y.; Tsuboyama, T.; Ichihashi, N.; Ohata, K.; Kawaguchi, T. Actuator-Equipped Knee Ankle Foot Orthosis. International Patent WO2017208851A1, 7 December 2017. [Google Scholar]
- Millet, D. Knee Support Orthosis Adapted to a Prolonged Seated Position. International Patent WO2018042108A1, 8 March 2018. [Google Scholar]
- Sankai, Y. Device for Producing Knee Joint Correction Tool, Method for Producing Knee Joint Correction Tool, and Method for Assissting Knee Joint Treatment. International Patent WO2018051898A1, 22 March 2018. [Google Scholar]
- Boucher, S.; Desrosiers, L. Knee Brace and System for Custom Fabricating Knee Brace for a User. International Patent WO2018090146A1, 24 May 2018. [Google Scholar]
- Anglada, G.; Devillers, L. Orthosis, in Particular of the Knee, Including Deformable Lateral Supports. International Patent WO2018108635A1, 21 June 2018. [Google Scholar]
- Bauerfeind, H.B.; Hebenstreit, S.; Stier, G. Limb Orthosis, in Particular Knee Brace. International Patent WO2019101910A1, 31 May 2019. [Google Scholar]
- Bleau, J.; Hinse, S.; Labelle, M. Knee Orthosis with Helicoidal Axis and Method of Design and Fabrication thereof. International Patent WO2019109178A1, 13 June 2019. [Google Scholar]
- Stefansson, G. Powered Prosthetic Knee with Battery Recharging During Regeneration Phase. International Patent WO2019118507A1, 20 June 2019. [Google Scholar]
- Anzai, H.; Nagatsuma, A.; Mitsui, K. Joint Mechanism, Knee Joint Assist Device, Joint Member, and Clutch unit. International Patent WO2020195906A1, 1 October 2020. [Google Scholar]
- Vallery, H.; Burgkart, R.; Hartmann, C.; Mitternacht, J.; Riener, R.; Buss, M. Complementary limb motion estimation for the control of active knee prostheses. Biomed. Tech. Eng. 2011, 56, 45–51. [Google Scholar] [CrossRef][Green Version]
- Sancisi, N.; Zannoli, D.; Parenti-Castelli, V.; Belvedere, C.; Leardini, A. A one-degree-of-freedom spherical mechanism for human knee joint modelling. Proc. Inst. Mech. Eng. 2011, 225, 725–735. [Google Scholar] [CrossRef] [PubMed]
- Yoon, J.; Kumar, R.P.; Özer, A. An adaptive foot device for increased gait and postural stability in lower limb Orthoses and exoskeletons. Int. J. Control Autom. Syst. 2011, 9, 515. [Google Scholar] [CrossRef]
- Nam, Y.; Kim, S.; Baek, S.R. Calculation of knee joint moment in isometric and isokinetic knee motion. Int. J. Precis. Eng. Manuf. 2011, 12, 921–924. [Google Scholar] [CrossRef]
- Akdoğan, E.; Adli, M.A. The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot. Mechatronics 2011, 21, 509–522. [Google Scholar] [CrossRef]
- Kim, K.; Kang, M.; Choi, Y.; Jang, H.; Han, J.; Han, C. Development of the exoskeleton knee rehabilitation robot using the linear actuator. Int. J. Precis. Eng. Manuf. 2012, 13, 1889–1895. [Google Scholar] [CrossRef]
- Mefoued, S.; Mohammed, S.; Amirat, Y. Toward Movement Restoration of Knee Joint Using Robust Control of Powered Orthosis. IEEE Trans. Control Syst. Technol. 2013, 21, 2156–2168. [Google Scholar] [CrossRef]
- Lalami, M.E.; Rifaï, H.; Mohammed, S.; Hassani, W.; Fried, G.; Amirat, Y. Output feedback control of an actuated lower limb orthosis with bounded input. Ind. Robot. Int. J. 2013, 40, 541–549. [Google Scholar] [CrossRef]
- Bulea, T.C.; Kobetic, R.; Audu, M.L.; Triolo, R.J. Stance controlled knee flexion improves stimulation driven walking after spinal cord injury. J. NeuroEng. Rehabil. 2013, 10, 68. [Google Scholar] [CrossRef] [PubMed]
- Tan, A.Q.; Dhaher, Y.Y. Evaluation of lower limb cross planar kinetic connectivity signatures post-stroke. J. Biomech. 2014, 47, 949–956. [Google Scholar] [CrossRef] [PubMed]
- Galen, S.S.; Clarke, C.J.; McLean, A.N.; Allan, D.B.; Conway, B.A. Isometric hip and knee torque measurements as an outcome measure in robot assisted gait training. NeuroRehabilitation 2014, 34, 287–295. [Google Scholar] [CrossRef]
- Yan, H.; Yang, C. Design and validation of a lower limb exoskeleton employing the recumbent cycling modality for post-stroke rehabilitation. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 3517–3525. [Google Scholar] [CrossRef]
- Yu, S.; Han, C.; Cho, I. Design Considerations of a Lower Limb Exoskeleton System to Assist walking and Load-Carrying of Infantry Soldiers. Appl. Bionics Biomech. 2014, 11, 119–134. Available online: https://www.hindawi.com/journals/abb/2014/585837/ (accessed on 23 February 2021). [CrossRef]
- Jaeger, L.; Marchal-Crespo, L.; Wolf, P.; Riener, R.; Michels, L.; Kollias, S. Brain activation associated with active and passive lower limb stepping. Front. Hum. Neurosci. 2014, 8, 828. [Google Scholar] [CrossRef] [PubMed]
- Hassani, W.; Mohammed, S.; Rifaï, H.; Amirat, Y. Powered orthosis for lower limb movements assistance and rehabilitation. Control Eng. Pract. 2014, 26, 245–253. [Google Scholar] [CrossRef]
- Domingo, A.; Lam, T. Reliability and validity of using the Lokomat to assess lower limb joint position sense in people with incomplete spinal cord injury. J. NeuroEng. Rehabil. 2014, 11, 167. [Google Scholar] [CrossRef]
- Shamaei, K.; Cenciarini, M.; Adams, A.A.; Gregorczyk, K.N.; Schiffman, J.M.; Dollar, A.M. Design and Evaluation of a Quasi-Passive Knee Exoskeleton for Investigation of Motor Adaptation in Lower Extremity Joints. IEEE Trans. Biomed. Eng. 2014, 1809–1821. [Google Scholar] [CrossRef] [PubMed]
- Mohammed, S.; Huo, W.; Rifaï, H.; Hassani, W.; Amirat, Y. Robust Control of an Actuated Orthosis for Lower Limb Movement Restoration, Intelligent Assistive Robots: Recent Advances in Assistive Robotics for Everyday Activities; Springer International Publishing: Cham, Switzerland, 2015; pp. 385–400. [Google Scholar] [CrossRef]
- Flynn, L.; Geeroms, J.; Jimenez-Fabian, R.; Vanderborght, B.; Vitiello, N.; Lefeber, D. Ankle–knee prosthesis with active ankle and energy transfer: Development of the CYBERLEGs Alpha-Prosthesis. Robot. Auton. Syst. 2015, 73, 4–15. [Google Scholar] [CrossRef]
- Meng, W.; Liu, Q.; Zhou, Z.; Ai, Q.; Sheng, B.; Xie, S. Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics 2015, 31, 132–145. [Google Scholar] [CrossRef]
- Farris, D.J.; Hampton, A.; Lewek, M.D.; Sawicki, G.S. Revisiting the mechanics and energetics of walking in individuals with chronic hemiparesis following stroke: From individual limbs to lower limb joints. J. NeuroEng. Rehabil. 2015, 12, 24. [Google Scholar] [CrossRef]
- Zanotto, D.; Akiyama, Y.; Stegall, P.; Agrawal, S.K. Knee Joint Misalignment in Exoskeletons for the Lower Extremities: Effects on User’s Gait. IEEE Trans. Robot. 2015, 31, 978–987. [Google Scholar] [CrossRef]
- Jun, S.; Zhou, X.; Ramsey, D.K.; Krovi, V.N. Smart Knee Brace Design with Parallel Coupled Compliant Plate Mechanism and Pennate Elastic Band Spring. J. Mech. Robot. 2015, 041024, 62. [Google Scholar] [CrossRef]
- Shamaei, K.; Cenciarini, M.; Adams, A.A.; Gregorczyk, K.N.; Schiffman, J.M.; Dollar, A.M. Biomechanical Effects of Stiffness in Parallel with the Knee Joint During Walking. IEEE Trans. Biomed. Eng. 2015, 62, 2389–2401. [Google Scholar] [CrossRef]
- Cai, V.A.D.; Ibanez, A.; Granata, C.; Nguyen, V.T.; Nguyen, M.T. Transparency enhancement for an active knee orthosis by a constraint-free mechanical design and a gait phase detection based predictive control. Mechanical 2017, 52, 729–748. [Google Scholar] [CrossRef]
- Zhang, F.; Hou, Z.-G.; Cheng, L.; Wang, W.; Chen, Y.; Hu, J.; Peng, L.; Wang, H. iLeg—A Lower Limb Rehabilitation Robot: A Proof of Concept. IEEE Trans. Hum.-Mach. Syst. 2016, 46, 761–768. [Google Scholar] [CrossRef]
- Garcia, E.; Sanz-Merodio, D.; Cestari, M.; Perez, M.; Sancho, J. An Active Knee Orthosis for the Physical Therapy of Neurological Disorders. In Robot 2015: Second Iberian Robotics Conference; Springer: Cham, Switzerland, 2016; pp. 327–337. [Google Scholar] [CrossRef]
- Windrich, M.; Grimmer, M.; Christ, O.; Rinderknecht, S.; Beckerle, P. Active lower limb prosthetics: A systematic review of design issues and solutions. Biomed. Eng. Online 2016, 15, 269–277. [Google Scholar] [CrossRef] [PubMed]
- Cherry, M.S.; Kota, S.; Young, A.; Ferris, D.P. Running with an Elastic Lower Limb Exoskeleton. J. Appl. Biomech. 2016, 32, 269–277. [Google Scholar] [CrossRef] [PubMed]
- Vouga, T.; Zhuang, K.Z.; Olivier, J.; Lebedev, M.A.; Nicolelis, M.A.; Bouri, M.; Bleuler, H. EXiO—A Brain-Controlled Lower Limb Exoskeleton for Rhesus Macaques. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 131–141. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Wang, H.; Yan, H.; Wang, X.; Jin, Z.; Vladareanu, L. Research on Safety and Compliance of a New Lower Limb Rehabilitation Robot. J. Healthc. Eng. 2017, 2017, 1523068. Available online: https://www.hindawi.com/journals/jhe/2017/1523068/ (accessed on 23 February 2021). [CrossRef]
- Kopitzsch, R.M.; Clever, D.; Mombaur, K. Optimization-based analysis of push recovery during walking motions to support the design of rigid and compliant lower limb exoskeletons. Adv. Robot. 2017, 31, 1238–1252. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Y.; Jiang, J.; Sun, B.; Cao, H. Unidirectional variable stiffness hydraulic actuator for load-carrying knee exoskeleton. Int. J. Adv. Robot. Syst. 2017. [Google Scholar] [CrossRef]
- Kim, H.J.; Lim, D.H.; Han, C.S. Development of a Passive Knee Mechanism for Lower Extremity Exoskeleton Robot. J. Korea Robot. Soc. 2017, 12, 107–115. [Google Scholar] [CrossRef]
- Mohan, S.; Mohanta, J.K.; Kurtenbach, S.; Paris, J.; Corves, B.; Huesing, M. Design, development, and control of a 2PRP-2PPR planar parallel manipulator for lower limb rehabilitation therapies. Mech. Mach. Theory 2017, 112, 272–294. [Google Scholar] [CrossRef]
- Lerner, Z.F.; Damiano, D.L.; Bulea, T.C. The Effects of Exoskeleton Assisted Knee Extension on Lower-Extremity Gait Kinematics, Kinetics, and Muscle Activity in Children with Cerebral Palsy. Sci. Rep. 2017, 7, 13512. [Google Scholar] [CrossRef]
- Nogueira, S.L.; Lambrecht, S.; Inoue, R.S.; Bortole, M.; Montagnoli, A.N.; Moreno, J.C.; Rocon, E.; Terra, M.H.; Siqueira, A.A.G.; Pons, J.L. Global Kalman filter approaches to estimate absolute angles of lower limb segments. Biomed. Eng. Online 2017, 16, 58. [Google Scholar] [CrossRef]
- Rifaï, H.; Mohammed, S.; Djouani, K.; Amirat, Y. Toward Lower Limbs Functional Rehabilitation Through a Knee-Joint Exoskeleton. IEEE Trans. Control Syst. Technol. 2017, 25, 712–719. [Google Scholar] [CrossRef]
- Tucker, M.R.; Shirota, C.; Lambercy, O.; Sulzer, J.S.; Gassert, R. Design and Characterization of an Exoskeleton for Perturbing the Knee During Gait. IEEE Trans. Biomed. Eng. 2017, 64, 2331–2343. [Google Scholar] [CrossRef]
- Castellote, J.M.; Kofler, M.; Mayr, A.; Saltuari, L. Evidence for Startle Effects due to Externally Induced Lower Limb Movements: Implications in Neurorehabilitation. BioMed Res. Int. 2017, 8471546. Available online: https://www.hindawi.com/journals/bmri/2017/8471546/ (accessed on 23 February 2021). [CrossRef] [PubMed]
- Kitahara, K.; Hayashi, Y.; Yano, S.; Kondo, T. Target-directed motor imagery of the lower limb enhances event-related desynchronization. PLoS ONE 2017. 12, e0184245. [CrossRef]
- Liu, Y.; Gao, Y.; Zhu, Y. A novel cable-pulley underactuated lower limb exoskeleton for human load-carrying walking. J. Mech. Med. Biol. 2017, 17, 1740042. [Google Scholar] [CrossRef]
- Ranaweera, R.; Gopura, R.; Jayawardena, T.; Mann, G. Development of A Passively Powered Knee Exoskeleton for Squat Lifting. J. Robot. Netw. Artif. Life 2018, 5, 45–51. [Google Scholar] [CrossRef]
- Zakaria, M.A.; Majeed, A.P.P.A.; Taha, Z.; Alim, M.M.; Baarath, K. Forward and Inverse Predictive Model for the Trajectory Tracking Control of a Lower Limb Exoskeleton for Gait Rehabilitation: Simulation modelling analysis. IOP Conf. Ser. Mater. Sci. Eng. 2018, 319, 012052. [Google Scholar] [CrossRef]
- Ahmed, S.F.; Joyo, M.K.; Ali, A.; Ali, A.M.M.; Kadir, K.A.; Naqvi, Y.R.; Bakar, B.A.; Shah, A. Robotic Exoskeleton Control for Lower Limb Rehabilitation of Knee Joint. Int. J. Eng. Technol. 2018, 7, 56–59. [Google Scholar] [CrossRef][Green Version]
- Chaichaowarat, R.; Kinugawa, J.; Kosuge, K. Unpowered Knee Exoskeleton Reduces Quadriceps Activity during Cycling. Engineering 2018, 4, 471–478. [Google Scholar] [CrossRef]
- Li, B.; Yuan, B.; Tang, S.; Mao, Y.; Zhang, D.; Huang, C.; Tan, B. Biomechanical design analysis and experiments evaluation of a passive knee-assisting exoskeleton for weight-climbing. Ind. Robot Int. J. 2018, 45, 436–445. [Google Scholar] [CrossRef]
- Eguchi, Y.; Kadone, H.; Suzuki, K. Standing Mobility Device with Passive Lower Limb Exoskeleton for Upright Locomotion. IEEEASME Trans. Mechatron. 2018, 23, 1608–1618. [Google Scholar] [CrossRef]
- Ringhof, S.; Patzer, I.; Beil, J.; Asfour, T.; Stein, T. Does a Passive Unilateral Lower Limb Exoskeleton Affect Human Static and Dynamic Balance Control? Front. Sports Act. Living 2019, 1, 22. [Google Scholar] [CrossRef] [PubMed]
- Mendoza-Crespo, R.; Torricelli, D.; Huegel, J.C.; Gordillo, J.L.; Pons, J.L.; Soto, R. An Adaptable Human-Like Gait Pattern Generator Derived from a Lower Limb Exoskeleton. Front. Robot. AI 2019, 6, 36. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Wang, X.; Zhu, Z.; Xi, R.; Wu, Q. Development and control of a robotic lower limb exoskeleton for paraplegic patients. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 1087–1098. [Google Scholar] [CrossRef]
- Zhao, Y.; Jia, B.; Liu, W.; Ge, W.; Dong, R. The control system research of the brain controlled medical lower limb exoskeleton. J. Comput. Methods Sci. Eng. 2019, 19, 27–33. [Google Scholar] [CrossRef]
- Natali, C.D.; Poliero, T.; Sposito, M.; Graf, E.; Bauer, C.; Pauli, C.; Bottenberg, E.; De Eyto, A.; O'Sullivan, L.; Hidalgo, A.F.; et al. Design and Evaluation of a Soft Assistive Lower Limb Exoskeleton. Robotica 2019, 37, 2014–2034. [Google Scholar] [CrossRef]
- Wang, F.; Yan, L.; Xiao, J.; Fan, L. Design and simulation analysis of an improved wearable power knee exoskeleton. J. Vibroeng. 2019, 21, 1472–1482. [Google Scholar] [CrossRef]
- Chen, B.; Zi, B.; Wang, Z.; Qin, L.; Liao, W.H. Knee exoskeletons for gait rehabilitation and human performance augmentation: A state-of-the-art. Mech. Mach. Theory 2019, 134, 499–511. [Google Scholar] [CrossRef]
- Kim, H.-J.; Lim, D.-H.; Kim, W.-S.; Han, C.-S. Development of a Passive Modular Knee Mechanism for a Lower Limb Exoskeleton Robot and Its Effectiveness in the Workplace. Int. J. Precis. Eng. Manuf. 2020, 21, 227–236. [Google Scholar] [CrossRef]
- de la Tejera, J.A.; Bustamante-Bello, M.R.; Ramirez-Mendoza, R.A.; Navarro-Tuch, S.A.; Izquierdo-Reyes, J.; Pablos-Hach, J.L. Smart health: The use of a lower limb exoskeleton in patients with sarcopenia. Int. J. Interact. Des. Manuf. IJIDeM 2020, 14, 1475–1489. [Google Scholar] [CrossRef]
- Tu, Y.; Zhu, A.; Song, J.; Shen, H.; Shen, Z.; Zhang, X.; Cao, G. An Adaptive Sliding Mode Variable Admittance Control Method for Lower Limb Rehabilitation Exoskeleton Robot. Appl. Sci. 2020, 10, 2536. [Google Scholar] [CrossRef]
- Lavrovsky, E.K.; Pismennaya, E.V. About the Operator’s Gaits in the Passive Exoskeleton of the Lower Extremities when using the Fixed Knee Mode. Mekhatronika Avtom. Upr. 2020, 21, 34–42. Available online: https://mech.novtex.ru/jour/article/view/746 (accessed on 23 February 2021). [CrossRef]
- Zhou, L.; Chen, W.; Chen, W.; Bai, S.; Zhang, J.; Wang, J. Design of a passive lower limb exoskeleton for walking assistance with gravity compensation. Mech. Mach. Theory 2020, 150, 103840. [Google Scholar] [CrossRef]
- Etenzi, E.; Borzuola, R.; Grabowski, A.M. Passive-elastic knee-ankle exoskeleton reduces the metabolic cost of walking. J. NeuroEng. Rehabil. 2020, 17, 104. [Google Scholar] [CrossRef]
- Chang, Y.; Wang, W.; Fu, C. A Lower Limb Exoskeleton Recycling Energy from Knee and Ankle Joints to Assist Push-Off. J. Mech. Robot. 2020, 12, 051011. [Google Scholar] [CrossRef]
- Wen, Y.; Si, J.; Brandt, A.; Gao, X.; Huang, H.H. Online Reinforcement Learning Control for the Personalization of a Robotic Knee Prosthesis. IEEE Trans. Cybern. 2020, 50, 2346–2356. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).