
Service Robots: Trends and Technology

 ,
,  ,
,  , , ,
, , ,  ,
,  and
and
Abstract
:1. Introduction
- What is a service robot?
- What are the main technological trends in the area of service robots?
- What are the most common applications of service robots?
- What are the main commercial technologies on-board of the most recent service robots?
Problem Formulation
- Undesirable situation: There exists a lack of specialization in trend predictions for service robots due to the nature of emerging technology.
- Assumptions: The development trends in this research area can be predicted through a literature review and will be useful among researchers.
- The Feasible Conceptual Future Desirable Situation: A compendium of actual service robots and literature trends will encourage technology development.
- The problem: To formulate a methodology that effectively helps to identify relevant information to provide significant figures and data.
- The solution: The development of a systematic literature review based on existing methodologies and its effective dissemination of results.
2. Materials and Methods
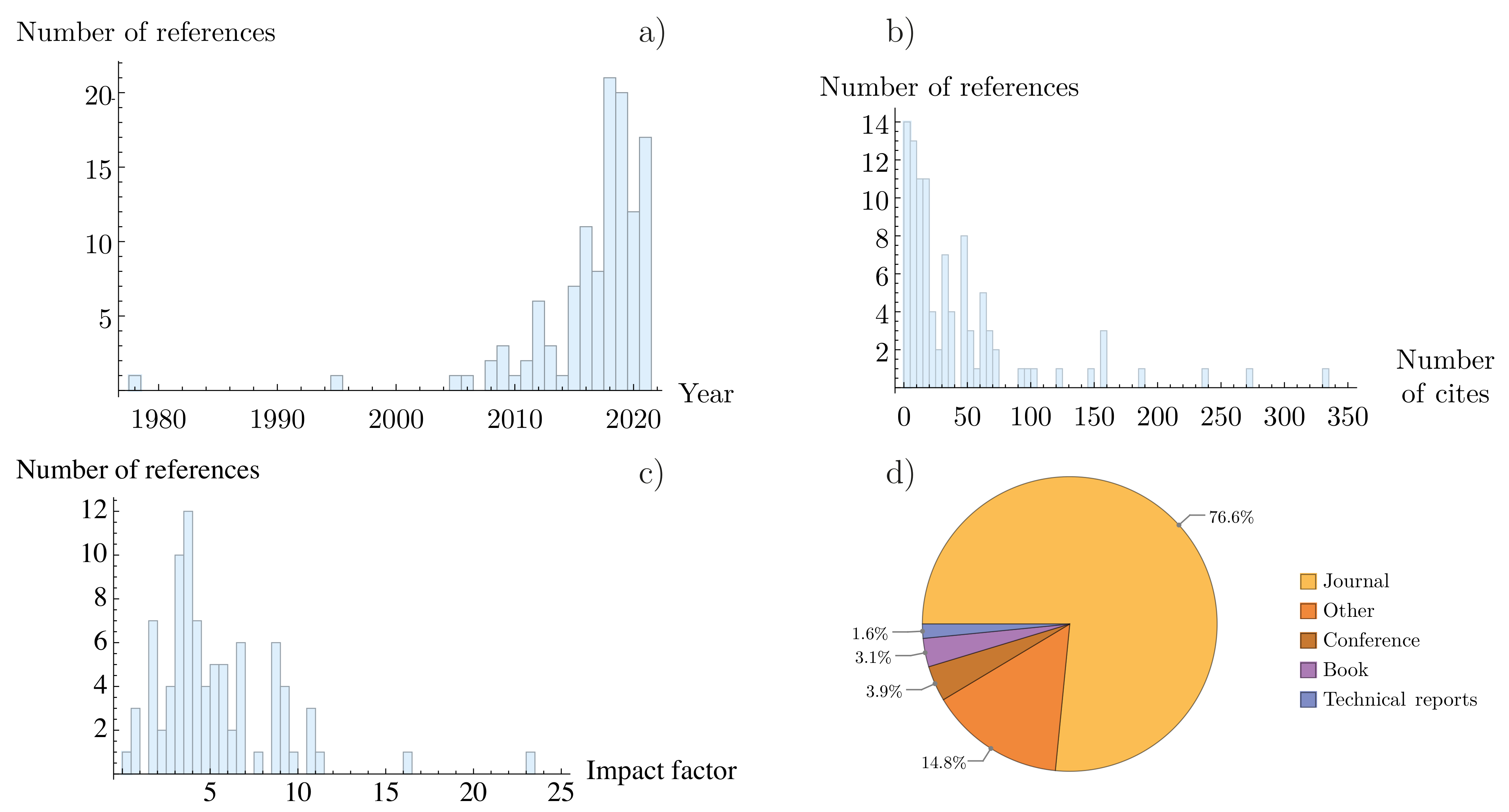
- Recent (2010–2020) literature review ensures a revision of the current state of the art of the technologies applied to service robotics, prioritizing papers published during the 2015–2020 period. Figure 1a shows the distribution of the years of publications of the revised papers for this review.
- Among the selected literature for each section, the most cited works were revised extensively. Figure 1b presents the distribution of the number of references with an increasing number of citations of the revised literature.
- The search of papers prioritizes journals with high impact factors; most revised papers were from journals with an impact factor higher than 1.0. Figure 1c shows journal impact factor of the revised papers in this review.
- Additionally, Figure 1d shows the type of references (journal, conference proceedings, books, technical reports, and others) selected and their percentage.
3. Results
3.1. Definitions and Types
- Class 1
- The robot totally replaces the human worker in an environment that can be either hazardous or dirty and the task is usually of a tedious nature.
- Class 2
- The robot operates closely in cooperation with a human in order to increase comfort or minimize discomfort.
- Class 3
- The robot operates on the human body.
Background
3.2. Robots Technology
3.3. Commercial Technology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Figure | Commercial Name | Developer | Classification | Application |
|---|---|---|---|---|
 | UVD Robot [64] | Blue Ocean Robotics | Professional use—Healthcare—Class 1 | Cleaning surfaces using UV on hospitals. |
 | MyAppCafe—Street barista [65] | My App Cafe GmbH | Personal use—Food—Class 1 | A robotic manipulator is installed in a cell and serves coffee with no human help and using a mobile application interface. |
 | EksoNR [66] | Ekso Bionics | Professional use—Healthcare—Class 3 | Exoskeleton that aids and accelerates therapy among users that suffer spinal injury. |
 | Nuro R2 [67] | Nuro Inc. | Personal use—Delivery—Class 1 | Autonomous mobile robot that drives through the city and delivers goods requested using a mobile application. |
 | Roomba [68] | iRobot | Personal use—Cleaning—Class 1 | Floor vacuum floor cleaner. |
 | Pepper [69] | SoftBank Robotics | Personal use—Multiple uses—Class 1 | Humanoid that recognizes faces and emotions is currently used in airports and schools to provide assistance. |
 | Turtlebot 2 [70] | OSRF | Professional use—Education—Class 2 | Low-cost robot kit for prototyping and learning. |
3.4. Scientific Literature
3.5. Applications
3.6. Trends
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Group, T.P. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [Green Version]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2009. [Google Scholar] [CrossRef]
- Lin, P. Robot ethics: The ethical and social implications of robotics. Choice Rev. Online 2012, 50, 50-0844. [Google Scholar] [CrossRef] [Green Version]
- Virk, G.S.; Moon, S.; Gelin, R. ISO standards for service robots. In Advances in Mobile Robotics, Proceedings of the 11th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, CLAWAR 2008, Coimbra, Portugal, 8–10 September 2008; World Scientific: Singapore, 2008; pp. 133–138. [Google Scholar] [CrossRef]
- ISO. Robots and Robotic Devices—Vocabulary ISO 8373:2012; Technical Report; ISO: Geneve, Switzerland, 2012. [Google Scholar]
- International Federation of Robotics. Service Robots. Available online: https://ifr.org/service-robots (accessed on 27 October 2021).
- Wirtz, J.; Patterson, P.G.; Kunz, W.H.; Gruber, T.; Lu, V.N.; Paluch, S.; Martins, A. Brave new world: Service robots in the frontline. J. Serv. Manag. 2018, 29, 907–931. [Google Scholar] [CrossRef] [Green Version]
- Kopacek, P. Development Trends in Robotics. IFAC-PapersOnLine 2016, 49, 36–41. [Google Scholar] [CrossRef]
- Haidegger, T.; Barreto, M.; Gonçalves, P.; Habib, M.K.; Ragavan, S.K.V.; Li, H.; Vaccarella, A.; Perrone, R.; Prestes, E. Applied ontologies and standards for service robots. Robot. Auton. Syst. 2013, 61, 1215–1223. [Google Scholar] [CrossRef]
- Bayat, B.; Bermejo-Alonso, J.; Carbonera, J.; Facchinetti, T.; Fiorini, S.; Goncalves, P.; Jorge, V.A.; Habib, M.; Khamis, A.; Melo, K.; et al. Requirements for building an ontology for autonomous robots. Ind. Robot. Int. J. 2016, 43, 469–480. [Google Scholar] [CrossRef]
- Schlenoff, C.; Prestes, E.; Madhavan, R.; Goncalves, P.; Li, H.; Balakirsky, S.; Kramer, T.; Miguelanez, E. An IEEE standard Ontology for Robotics and Automation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1337–1342. [Google Scholar] [CrossRef]
- Zielinska, T.T. History of Service Robots and New Trends; IGI Global: Hershey, PA, USA, 2019; pp. 158–187. [Google Scholar] [CrossRef]
- Jorge, V.A.; Rey, V.F.; Maffei, R.; Rama Fiorini, S.; Carbonera, J.L.; Branchi, F.; Meireles, J.P.; Franco, G.S.; Farina, F.; Da Silva, T.S.; et al. Exploring the IEEE ontology for robotics and automation for heterogeneous agent interaction. Robot. Comput.-Integr. Manuf. 2015, 33, 12–20. [Google Scholar] [CrossRef]
- Fiorini, S.R.; Carbonera, J.L.; Goncalves, P.; Jorge, V.A.; Rey, V.F.; Haidegger, T.; Abel, M.; Redfield, S.A.; Balakirsky, S.; Ragavan, V.; et al. Extensions to the core ontology for robotics and automation. Robot. Comput.-Integr. Manuf. 2015, 33, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Gasevic, D.; Devedzic, V.; Djuric, D. Model Driven Engineering and Ontology Development; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Gruber, T.R. Toward Principles for the Design of Ontologies. Int. J. Hum.-Comput. Stud. 1995, 43, 907–928. [Google Scholar] [CrossRef]
- Iocchi, L.; Holz, D.; Ruiz-Del-Solar, J.; Sugiura, K.; Van Der Zant, T. RoboCup@Home: Analysis and results of evolving competitions for domestic and service robots. Artif. Intell. 2015, 229, 258–281. [Google Scholar] [CrossRef]
- Simoens, P.; Dragone, M.; Saffiotti, A. The Internet of Robotic Things: A review of concept, added value and applications. Int. J. Adv. Robot. Syst. 2018, 15, 1–11. [Google Scholar] [CrossRef]
- Kommera, V. Robotic process automation. Am. J. Intell. Syst. 2019, 9, 49–53. [Google Scholar] [CrossRef] [Green Version]
- Aguirre, S.; Rodriguez, A. Automation of a business process using robotic process automation (RPA): A case study. In Workshop on Engineering Applications; Springer: Berlin/Heidelberg, Germany, 2017; pp. 65–71. [Google Scholar]
- Leno, V.; Polyvyanyy, A.; Dumas, M.; La Rosa, M.; Maggi, F.M. Robotic Process Mining: Vision and Challenges. Bus. Inf. Syst. Eng. 2021, 63, 301–314. [Google Scholar] [CrossRef] [Green Version]
- Pokharkar, A.P. Robotic Process Automation: Concept, Benefits, Challenges in Banking Industry. IIBM’S J. Manag. Res. 2019, 4, 17–25. [Google Scholar] [CrossRef]
- Coccia, M. The theory of technological parasitism for the measurement of the evolution of technology and technological forecasting. Technol. Forecast. Soc. Chang. 2019, 141, 289–304. [Google Scholar] [CrossRef]
- Coccia, M. A theory of classification and evolution of technologies within a Generalised Darwinism. Technol. Anal. Strateg. Manag. 2019, 31, 517–531. [Google Scholar] [CrossRef]
- Coccia, M.; Watts, J. A theory of the evolution of technology: Technological parasitism and the implications for innovation magement. J. Eng. Technol. Manag. JET-M 2020, 55, 101552. [Google Scholar] [CrossRef]
- Coccia, M. Disruptive firms and technological change. Quad. IRCrES-CNR 2018, 3, 3–18. [Google Scholar] [CrossRef]
- Coccia, M. Disruptive firms and industrial change. J. Econ. Soc. Thought 2018, 4, 437–450. [Google Scholar]
- Coccia, M. Sources of technological innovation: Radical and incremental innovation problem-driven to support competitive advantage of firms. Technol. Anal. Strateg. Manag. 2017, 29, 1048–1061. [Google Scholar] [CrossRef]
- Coccia, M. Asymmetry of the technological cycle of disruptive innovations. Technol. Anal. Strateg. Manag. 2020, 32, 1462–1477. [Google Scholar] [CrossRef]
- Coccia, M. Global Encyclopedia of Public Administration, Public Policy, and Governance; Springer: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Paulius, D.; Sun, Y. A Survey of Knowledge Representation in Service Robotics. Robot. Auton. Syst. 2019, 118, 13–30. [Google Scholar] [CrossRef] [Green Version]
- Nezhnikova, E.; Pshinshev, K. The prospect of development of robotics in Russia. In Proceedings of the E3S Web of Conferences, Rostovon-Don, Russia, 26–28 February 2020; Volume 175, p. 05043. [Google Scholar]
- Nocentini, O.; Fiorini, L.; Acerbi, G.; Sorrentino, A.; Mancioppi, G.; Cavallo, F. A survey of behavioral models for social robots. Robotics 2019, 8, 54. [Google Scholar] [CrossRef] [Green Version]
- Schwab, K. The Fourth Industrial Revolution; Currency: New York, NY, USA, 2017. [Google Scholar]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef] [Green Version]
- Fiske, A.; Henningsen, P.; Buyx, A. Your robot therapist will see you now: Ethical implications of embodied artificial intelligence in psychiatry, psychology, and psychotherapy. J. Med. Internet Res. 2019, 21, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Abdel-Basset, M.; Chang, V.; Nabeeh, N.A. An intelligent framework using disruptive technologies for COVID-19 analysis. Technol. Forecast. Soc. Chang. 2021, 163, 120431. [Google Scholar] [CrossRef]
- Wan, S.; Gu, Z.; Ni, Q. Cognitive computing and wireless communications on the edge for healthcare service robots. Comput. Commun. 2020, 149, 99–106. [Google Scholar] [CrossRef]
- Santos, N.B.; Bavaresco, R.S.; Tavares, J.E.; Ramos, G.d.O.; Barbosa, J.L. A systematic mapping study of robotics in human care. Robot. Auton. Syst. 2021, 144, 103833. [Google Scholar] [CrossRef]
- Jeong, G.M.; Park, C.W.; You, S.; Ji, S.H. A study on the education assistant system using smartphones and service robots for children. Int. J. Adv. Robot. Syst. 2014, 11, 71. [Google Scholar] [CrossRef]
- Han, J. Robot-aided learning and r-learning services. In Human-Robot Interaction; InTech: Rijeka, Croatia, 2010; p. 288. [Google Scholar]
- Meghdari, A.; Alemi, M.; Zakipour, M.; Kashanian, S.A. Design and Realization of a Sign Language Educational Humanoid Robot. J. Intell. Robot. Syst. Theory Appl. 2019, 95, 3–17. [Google Scholar] [CrossRef]
- Rivera, Z.B.; De Simone, M.C.; Guida, D. Unmanned ground vehicle modelling in Gazebo/ROS-based environments. Machines 2019, 7, 42. [Google Scholar] [CrossRef] [Green Version]
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The current state and future outlook of rescue robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- Hu, L.; Miao, Y.; Wu, G.; Hassan, M.M.; Humar, I. iRobot-Factory: An intelligent robot factory based on cognitive manufacturing and edge computing. Future Gener. Comput. Syst. 2019, 90, 569–577. [Google Scholar] [CrossRef]
- Zamora-Izquierdo, M.A.; Santa, J.; Martínez, J.A.; Martínez, V.; Skarmeta, A.F. Smart farming IoT platform based on edge and cloud computing. Biosyst. Eng. 2019, 177, 4–17. [Google Scholar] [CrossRef]
- Tussyadiah, I. A review of research into automation in tourism: Launching the Annals of Tourism Research Curated Collection on Artificial Intelligence and Robotics in Tourism. Ann. Tour. Res. 2020, 81, 102883. [Google Scholar] [CrossRef]
- Leung, R. Smart hospitality: Taiwan hotel stakeholder perspectives. Tour. Rev. 2019, 74, 50–62. [Google Scholar] [CrossRef]
- Bolton, R.N.; McColl-Kennedy, J.R.; Cheung, L.; Gallan, A.; Orsingher, C.; Witell, L.; Zaki, M. Customer experience challenges. J. Serv. Manag. 2018, 29, 776–808. [Google Scholar] [CrossRef] [Green Version]
- Mende, M.; Scott, M.L.; van Doorn, J.; Grewal, D.; Shanks, I. Service Robots Rising: How Humanoid Robots Influence Service Experiences and Elicit Compensatory Consumer Responses. J. Mark. Res. 2019, 56, 535–556. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, J.; Tao, G.; Yang, J.; Hu, L. Wearable affective robot. IEEE Access 2018, 6, 64766–64776. [Google Scholar] [CrossRef]
- González-González, C.S.; Gil-Iranzo, R.M.; Paderewski-Rodríguez, P. Human–robot interaction and sexbots: A systematic literature review. Sensors 2021, 21, 216. [Google Scholar]
- Bösch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 76–91. [Google Scholar] [CrossRef]
- Do, H.M.; Pham, M.; Sheng, W.; Yang, D.; Liu, M. RiSH: A robot-integrated smart home for elderly care. Robot. Auton. Syst. 2018, 101, 74–92. [Google Scholar] [CrossRef]
- Čaić, M.; Odekerken-Schröder, G.; Mahr, D. Service robots: Value co-creation and co-destruction in elderly care networks. J. Serv. Manag. 2018, 29, 178–205. [Google Scholar] [CrossRef] [Green Version]
- Shin, M.S.; Kim, B.C.; Hwang, S.M.; Ko, M.C. Design and implementation of IoT-based intelligent surveillance robot. Stud. Inform. Control 2016, 25, 422. [Google Scholar] [CrossRef] [Green Version]
- Belanche, D.; Casaló, L.V.; Flavián, C. Artificial Intelligence in FinTech: Understanding robo-advisors adoption among customers. Ind. Manag. Data Syst. 2019, 119, 1411–1430. [Google Scholar] [CrossRef]
- Van Pinxteren, M.M.; Wetzels, R.W.; Rüger, J.; Pluymaekers, M.; Wetzels, M. Trust in humanoid robots: Implications for services marketing. J. Serv. Mark. 2019, 33, 507–518. [Google Scholar] [CrossRef] [Green Version]
- Borghi, M.; Mariani, M.M. Service robots in online reviews: Online robotic discourse. Ann. Tour. Res. 2021, 87, 103036. [Google Scholar] [CrossRef]
- Lin, T.Y.; Wu, K.R.; Chen, Y.S.; Huang, W.H.; Chen, Y.T. Takeout Service Automation with Trained Robots in the Pandemic-Transformed Catering Business. IEEE Robot. Autom. Lett. 2021, 6, 903–910. [Google Scholar] [CrossRef]
- Hu, Y. An improvement or a gimmick? The importance of user perceived values, previous experience, and industry context in human–robot service interaction. J. Destin. Mark. Manag. 2021, 21, 100645. [Google Scholar] [CrossRef]
- Jörling, M.; Böhm, R.; Paluch, S. Service Robots: Drivers of Perceived Responsibility for Service Outcomes. J. Serv. Res. 2019, 22, 404–420. [Google Scholar] [CrossRef]
- Bradley, G.W. Self-serving biases in the attribution process: A reexamination of the fact or fiction question. J. Personal. Soc. Psychol. 1978, 36, 56–71. [Google Scholar] [CrossRef]
- Blue Ocean Robotics. UVD Robot Web Page. Available online: http://uvd.blue-ocean-robotics.com (accessed on 20 September 2021).
- My App Cafe GmbH. My App Cafe—Street Barista. Available online: https://www.my-app-cafe.com (accessed on 20 September 2021).
- Ekso Bionics. Ekso Homepage. Available online: https://eksobionics.com (accessed on 20 September 2021).
- Nuro Inc. Nuro Homepage. Available online: https://www.nuro.ai (accessed on 20 September 2021).
- iRobot. Roomba Robot. Available online: https://global.irobot.com/en/Robot-Resources?Country=MX (accessed on 20 September 2021).
- SoftBank Robotics. Pepper Robot Homepage. Available online: https://www.softbankrobotics.com/emea/en/pepper (accessed on 20 September 2021).
- Open Source Robotics Foundation. TurtleBot Homepage. Available online: https://www.turtlebot.com (accessed on 20 September 2021).
- Dhakal, P.; Damacharla, P.; Javaid, A.Y.; Vege, H.K.; Devabhaktuni, V.K. IVACS: I ntelligent v oice A ssistant for C oronavirus Disease (COVID-19) S elf-Assessment. In Proceedings of the 2020 International Conference on Artificial Intelligence and Modern Assistive Technology, ICAIMAT 2020, Riyadh, Saudi Arabia, 24–26 November 2020. [Google Scholar] [CrossRef]
- Chuah, S.H.W.; Aw, E.C.X.; Yee, D. Unveiling the complexity of consumers’ intention to use service robots: An fsQCA approach. Comput. Hum. Behav. 2021, 123, 106870. [Google Scholar] [CrossRef]
- Hou, Y.; Zhang, K.; Li, G. Service robots or human staff: How social crowding shapes tourist preferences. Tour. Manag. 2021, 83, 104242. [Google Scholar] [CrossRef]
- Prentice, C.; Nguyen, M. Robotic service quality—Scale development and validation. J. Retail. Consum. Serv. 2021, 62, 102661. [Google Scholar] [CrossRef]
- Shimmura, T.; Ichikari, R.; Okuma, T.; Ito, H.; Okada, K.; Nonaka, T. Service Robot Introduction to a Restaurant Enhances Both Labor Productivity and Service Quality; Elsevier B.V.: Amsterdam, The Netherlands, 2020; Volume 88, pp. 589–594. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Mihelj, M.; Bajd, T.; Ude, A.; Lenarcic, J.; Stanovnik, A.; Munih, M.; Rejc, J.; Šlajpah, S. Robotics, 2nd ed.; Springer: Cham, Switzerland, 2018; pp. 1–251. [Google Scholar] [CrossRef]
- Karabegović, I.; Karabegović, E.; Mahmić, M.; Husak, E. The application of service robots for logistics in manufacturing processes. Adv. Prod. Eng. Manag. 2015, 10, 185–194. [Google Scholar] [CrossRef] [Green Version]
- Tsarouchi, P.; Makris, S.; Chryssolouris, G. Human–robot interaction review and challenges on task planning and programming. Int. J. Comput. Integr. Manuf. 2016, 29, 916–931. [Google Scholar] [CrossRef]
- Dekle, R. Robots and industrial labor: Evidence from Japan. J. Jpn. Int. Econ. 2020, 58, 101108. [Google Scholar] [CrossRef]
- Pyo, Y.; Nakashima, K.; Kuwahata, S.; Kurazume, R.; Tsuji, T.; Morooka, K.; Hasegawa, T. Service robot system with an informationally structured environment. Robot. Auton. Syst. 2015, 74, 148–165. [Google Scholar] [CrossRef] [Green Version]
- Coronado, E.; Venture, G.; Yamanobe, N. Applying Kansei/Affective Engineering Methodologies in the Design of Social and Service Robots: A Systematic Review. Int. J. Soc. Robot. 2021, 13, 1161–1171. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Koceski, S.; Koceska, N. Evaluation of an Assistive Telepresence Robot for Elderly Healthcare. J. Med. Syst. 2016, 40, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Baisch, S.; Kolling, T.; Schall, A.; Rühl, S.; Selic, S.; Kim, Z.; Rossberg, H.; Klein, B.; Pantel, J.; Oswald, F.; et al. Acceptance of Social Robots by Elder People: Does Psychosocial Functioning Matter? Int. J. Soc. Robot. 2017, 9, 293–307. [Google Scholar] [CrossRef]
- Choi, Y.; Choi, M.; Oh, M.; Kim, S. Service robots in hotels: Understanding the service quality perceptions of human-robot interaction. J. Hosp. Mark. Manag. 2020, 29, 613–635. [Google Scholar] [CrossRef]
- Pinillos, R.; Marcos, S.; Feliz, R.; Zalama, E.; Gómez-García-Bermejo, J. Long-term assessment of a service robot in a hotel environment. Robot. Auton. Syst. 2016, 79, 40–57. [Google Scholar] [CrossRef] [Green Version]
- Fuentes-Moraleda, L.; Díaz-Pérez, P.; Orea-Giner, A.; Muñoz- Mazón, A.; Villacé-Molinero, T. Interaction between hotel service robots and humans: A hotel-specific Service Robot Acceptance Model (sRAM). Tour. Manag. Perspect. 2020, 36, 100751. [Google Scholar] [CrossRef]
- Chiang, A.H.; Trimi, S. Impacts of service robots on service quality. Serv. Bus. 2020, 14, 439–459. [Google Scholar] [CrossRef]
- Seyitoğlu, F.; Ivanov, S. Service robots as a tool for physical distancing in tourism. Curr. Issues Tour. 2021, 24, 1631–1634. [Google Scholar] [CrossRef]
- Ding, I.J.; Lin, R.Z.; Lin, Z.Y. Service robot system with integration of wearable Myo armband for specialized hand gesture human–computer interfaces for people with disabilities with mobility problems. Comput. Electr. Eng. 2018, 69, 815–827. [Google Scholar] [CrossRef]
- Reich-Stiebert, N.; Eyssel, F. Learning with Educational Companion Robots? Toward Attitudes on Education Robots, Predictors of Attitudes, and Application Potentials for Education Robots. Int. J. Soc. Robot. 2015, 7, 875–888. [Google Scholar] [CrossRef]
- Geyer-Klingeberg, J.; Nakladal, J.; Baldauf, F.; Veit, F. Process Mining and Robotic Process Automation: A Perfect Match Process Mining as Enabler for RPA Implementation. In Proceedings of the 16th International Conference on Business Process Management, Sydney, Australia, 9–14 September 2018; Volume i. [Google Scholar]
- Choubey, A.; Sharma, M. Implementation of robotics and its impact on sustainable banking: A futuristic study. J. Phys. Conf. Ser. 2021, 1911, 012013. [Google Scholar] [CrossRef]
- Zhang, X.; Wen, Z. Thoughts on the development of artificial intelligence combined with RPA. J. Phys. Conf. Ser. 2021, 1883, 012151. [Google Scholar] [CrossRef]
- Leopold, H.; van der Aa, H.; Reijers, H.A. Identifying candidate tasks for robotic process automation in textual process descriptions. Lect. Notes Bus. Inf. Process. 2018, 318, 67–81. [Google Scholar] [CrossRef]
- Gavrilovskaya, N.V.; Kuvaldin, V.P.; Zlobina, I.S.; Lomakin, D.E.; Suchkova, E.E. Developing a robot with computer vision for automating business processes of the industrial complex. J. Phys. Conf. Ser. 2021, 1889, 022024. [Google Scholar] [CrossRef]
- Stepanova, E.R.; von der Heyde, M.; Kitson, A.; Schiphorst, T.; Riecke, B.E. Gathering and applying guidelines for mobile robot design for urban search and rescue application. In Proceedings of the International Conference on Human-Computer Interaction, Vancouver, BC, Canada, 9–14 July 2017; pp. 562–581. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef] [Green Version]
- Cheong, A.; Lau, M.; Foo, E.; Hedley, J.; Bo, J. Development of a Robotic Waiter System; Elsevier: Amsterdam, The Netherlands, 2016; Volume 49, pp. 681–686. [Google Scholar] [CrossRef]
- Zhang, T.; Li, Q.; Zhang, C.S.; Liang, H.W.; Li, P.; Wang, T.M.; Li, S.; Zhu, Y.L.; Wu, C. Current trends in the development of intelligent unmanned autonomous systems. Front. Inf. Technol. Electron. Eng. 2017, 18, 68–85. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Li, Z.; Wang, H.; Li, W. Unmanned Aerial Vehicle for Transmission Line Inspection: Status, Standardization, and Perspectives. Front. Energy Res. 2021, 9, 1–13. [Google Scholar] [CrossRef]
- Fang, B.; Jia, S.; Guo, D.; Xu, M.; Wen, S.; Sun, F. Survey of imitation learning for robotic manipulation. Int. J. Intell. Robot. Appl. 2019, 3, 362–369. [Google Scholar] [CrossRef]
- Okuda, T.; Shoda, S. AI-based chatbot service for financial industry. Fujitsu Sci. Tech. J. 2018, 54, 4–8. [Google Scholar]
- Archibald, M.; Barnard, A. Futurism in nursing: Technology, robotics and the fundamentals of care. J. Clin. Nurs. 2018, 27, 2473–2480. [Google Scholar] [CrossRef] [PubMed]
- Stavropoulos, G.; Giakoumis, D.; Moustakas, K.; Tzovaras, D. Automatic action recognition for assistive robots to support MCI patients at home. In Proceedings of the 10th international conference on pervasive technologies related to assistive environments, Rhodes, Greece, 21–23 June 2017; pp. 366–371. [Google Scholar] [CrossRef]
- Shen, Z.; Wu, Y. Investigation of practical use of humanoid robots in elderly care centres. In Proceedings of the Fourth International Conference on Human Agent Interaction, Singapore, 4–7 October 2016; pp. 63–66. [Google Scholar] [CrossRef]
- Andrade, K.; Fernandes, G.; Caurin, G.; Siqueira, A.; Romero, R.; Pereira, R. Dynamic player modelling in serious games applied to rehabilitation robotics. In Proceedings of the 2014 Joint Conference on Robotics: SBR-LARS Robotics Symposium and Robocontrol, Sao Carlos, Brazil, 18–23 October 2014; pp. 211–216. [Google Scholar] [CrossRef]
- Koceska, N.; Koceski, S.; Zobel, P.; Trajkovik, V.; Garcia, N. A telemedicine robot system for assisted and independent living. Sensors 2019, 19, 834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vysocky, A.; Novak, P. Human—Robot collaboration in industry. MM Sci. J. 2016, 9, 903–906. [Google Scholar] [CrossRef]
- Correll, N.; Bekris, K.; Berenson, D.; Brock, O.; Causo, A.; Hauser, K.; Okada, K.; Rodriguez, A.; Romano, J.; Wurman, P. Analysis and observations from the first Amazon picking challenge. IEEE Trans. Autom. Sci. Eng. 2018, 15, 172–188. [Google Scholar] [CrossRef]
- Zachiotis, G.; Andrikopoulos, G.; Gornez, R.; Nakamura, K.; Nikolakopoulos, G. A Survey on the Application Trends of Home Service Robotics. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1999–2006. [Google Scholar] [CrossRef]
- Solorio, J.; Garcia-Bravo, J.; Newell, B. Voice Activated Semi-Autonomous Vehicle Using off the Shelf Home Automation Hardware. IEEE Internet Things J. 2018, 5, 5046–5054. [Google Scholar] [CrossRef]
- Parmiggiani, A.; Fiorio, L.; Scalzo, A.; Sureshbabu, A.; Randazzo, M.; Maggiali, M.; Pattacini, U.; Lehmann, H.; Tikhanoff, V.; Domenichelli, D.; et al. The design and validation of the R1 personal humanoid. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 674–680. [Google Scholar] [CrossRef]
- Dobrev, Y.; Gulden, P.; Vossiek, M. An Indoor Positioning System Based on Wireless Range and Angle Measurements Assisted by Multi-Modal Sensor Fusion for Service Robot Applications. IEEE Access 2018, 6, 69036–69052. [Google Scholar] [CrossRef]
- Jiang, S.; Yao, W.; Hong, Z.; Li, L.; Su, C.; Kuc, T.Y. A classification-lock tracking strategy allowing a person-following robot to operate in a complicated indoor environment. Sensors 2018, 18, 3903. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dobrev, Y.; Vossiek, M.; Christmann, M.; Bilous, I.; Gulden, P. Steady Delivery: Wireless Local Positioning Systems for Tracking and Autonomous Navigation of Transport Vehicles and Mobile Robots. IEEE Microw. Mag. 2017, 18, 26–37. [Google Scholar] [CrossRef]
- Lu, L.; Cai, R.; Gursoy, D. Developing and validating a service robot integration willingness scale. Int. J. Hosp. Manag. 2019, 80, 36–51. [Google Scholar] [CrossRef]
- Chang, K.; Rammos, P.; Wilkerson, S.A.; Bundy, M.; Gadsden, S.A. LiPo battery energy studies for improved flight performance of unmanned aerial systems. Unmanned Syst. Technol. XVIII 2016, 9837, 98370W. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, J.; Fiammetta, C. Analysis of Gender Stereotypes for the Design of Service Robots: Case Study on the Chinese Catering Market. In Proceedings of the DIS 2021—2021 ACM Designing Interactive Systems Conference: Nowhere and Everywhere, Online, 28 June–2 July 2021; pp. 1336–1344. [Google Scholar] [CrossRef]



| Operation Areas | Applications | Keywords |
|---|---|---|
| Healthcare | Interacts directly with humans, handling routine logistical tasks, disinfecting rooms, helping transport patients, moving heavy machinery. | Artificial intelligence, ethics, medicine, robotics, COVID-19, blockchain, Internet of Medical Things (iomt), Industry 4.0, healthcare, 5G. |
| Education | Serve as a tutor or a peer in a student’s home. Teaches and quizzes a student on the topics they are having trouble with in the classroom, be controlled by a teacher. | Children’s learning, N-screen, remote control, robot-based learning, streaming, hardware design, sign language, social child–robot interaction, service agent. |
| Technology and kinetics | Uses in military, scientific, agricultural, commercial, policing, surveillance, product deliveries, distribution and logistics, aerial photography fields, calculation, and decision making through artificial intelligence algorithm. | MATLAB, multibody dynamics, robotics, wheeled mobile robot, extreme environments, IoT, edge-computing, artificial intelligence, power supply, energy management, locomotion, navigation, perception, sensoring. |
| Leisure and recreation | Diversified booking method, improved pre-arrival experience, increased personalized data collection, new costumer experiences, shopping assistant, chatbots-as-a-service, exhibitions, and events. | Artificial intelligence, automated tourism, intelligent automation, service robots, customer experience challenges, physical and social realms, emotion cognition, social robot. |
| Smart cities | Establish the digital model of physical space and social space, collect data of the environment and its own operation, respond to various needs in real time. | Assistive technology, elderly care, home service robot, smart home, IoT, surveillance robot, intelligent service, context awareness, future service scenarios, value networks. |
| Economy | Increase in productivity in service organizations and their ability to generate insights. Robots can open spreadsheets and databases, copy data between programs, compare entries, and perform other routine tasks. | Artificial intelligence, finance, robo-advisors, robots, technology adoption, anthropomorphism, humanoid service robots, human–robot interaction, public service, trust, turn-taking. |
| Field | Figure | Commercial Name | Robot Type | Application |
|---|---|---|---|---|
| Healthcare |  | Aldebaran NAO robot [107] | Humanoid robot | Physical exercise programs in elderly health centers. |
 | Care-o-Bot [109] | Mobile robot assistant | Implements routines such as taking medicine, wall following, and door passing. | |
| Industry |  | Financial Services Solution Finplex Robot Agent Platform (FRAP) [104] | Chatbot | Provide support to customers in financial-product sales. |
 | Yaskawa Motoman [111] | Autonomous robot | Autonomous robot to pick objects from a warehouse shelf. | |
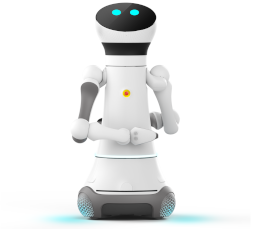
| Home service |  | R1 [114] | Humanoid robot | Help in house chores, grasping and carrying objects, opening doors, and entertainment. |
| Multi-purpose indoor environments |  | Festo Robotino [114] | Mobile robot | Indoor positioning system for service robot applications. |
 | Pioneer P3-DX [115] | Mobile robot | Wall detection and obstacle avoidance, autonomous navigation. | |
 | Beta-G [115] | Mobile robot | Waiter robot (identify tables in a restaurant, go to the target table to serve the food). |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez-Aguirre, J.A.; Osorio-Oliveros, R.; Rodríguez-Hernández, K.L.; Lizárraga-Iturralde, J.; Morales Menendez, R.; Ramírez-Mendoza, R.A.; Ramírez-Moreno, M.A.; Lozoya-Santos, J.d.J. Service Robots: Trends and Technology. Appl. Sci. 2021, 11, 10702. https://doi.org/10.3390/app112210702
Gonzalez-Aguirre JA, Osorio-Oliveros R, Rodríguez-Hernández KL, Lizárraga-Iturralde J, Morales Menendez R, Ramírez-Mendoza RA, Ramírez-Moreno MA, Lozoya-Santos JdJ. Service Robots: Trends and Technology. Applied Sciences. 2021; 11(22):10702. https://doi.org/10.3390/app112210702
Chicago/Turabian StyleGonzalez-Aguirre, Juan Angel, Ricardo Osorio-Oliveros, Karen L. Rodríguez-Hernández, Javier Lizárraga-Iturralde, Rubén Morales Menendez, Ricardo A. Ramírez-Mendoza, Mauricio Adolfo Ramírez-Moreno, and Jorge de Jesús Lozoya-Santos. 2021. "Service Robots: Trends and Technology" Applied Sciences 11, no. 22: 10702. https://doi.org/10.3390/app112210702