
Research on Intelligent Fault Diagnosis of Rolling Bearing Based on Improved Deep Residual Network


Abstract
:1. Introduction
2. Deep Residual Network (ResNet)
2.1. Convolutional Layer
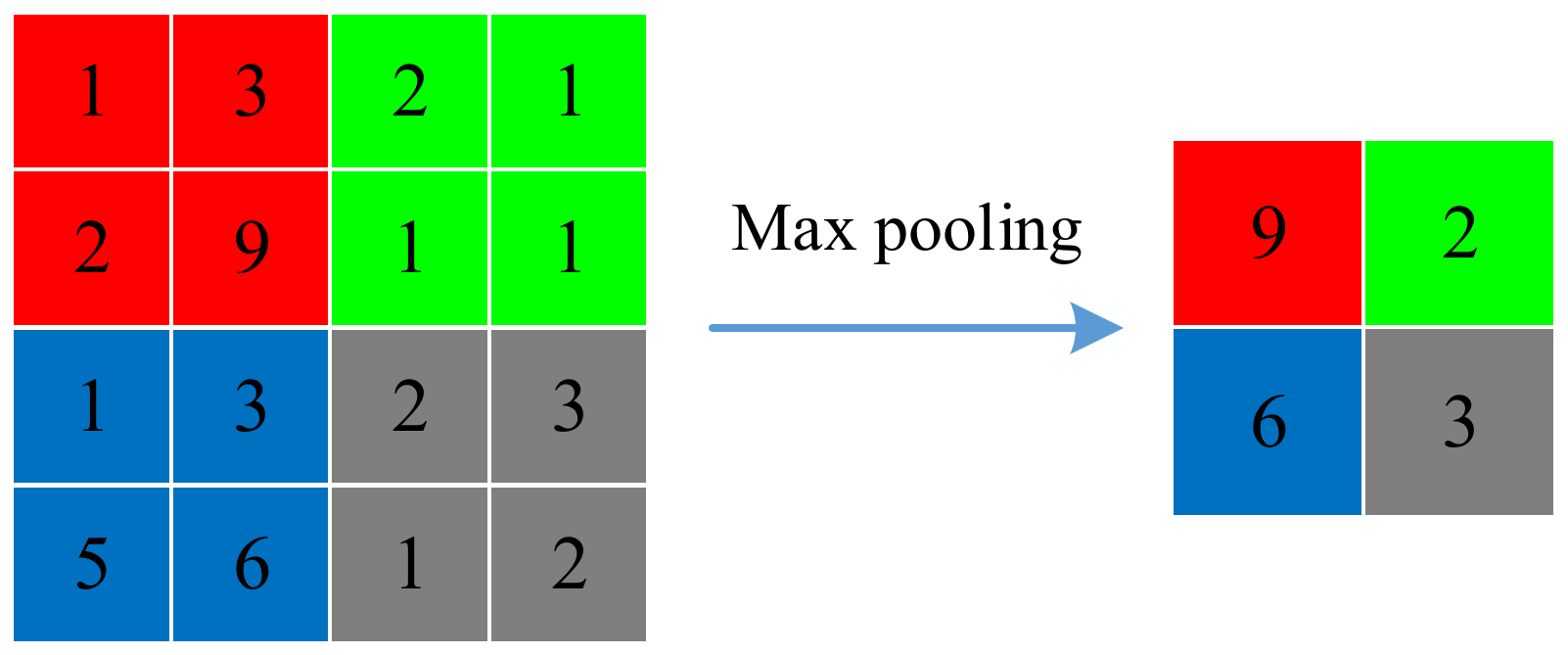
2.2. Max Pooling Layer
2.3. Residual Building Block
2.4. Global Average Pooling
2.5. The Objective Function
3. The Proposed Method
4. Experimental Verifications
4.1. Experimental Data Collection
4.2. Data Preprocessing
4.2.1. Signal Normalization
4.2.2. Data Augmentation
4.2.3. Dropout
4.3. Hyperparameter Setup
4.4. Outcome of Experiment
4.5. Discussion
4.6. Performance Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Y.; Jia, F.; Zhou, X.; Lin, J. A Deep Learning-based Method for Machinery Health Monitoring with Big Data. J. Mech. Eng. 2015, 51, 49–56. [Google Scholar] [CrossRef]
- El-Thalji, I.; Jantunen, E. A summary of fault modeling and predictive health monitoring of rolling element bearings. Mech. Syst. Signal Process. 2015, 60–61, 252–272. [Google Scholar] [CrossRef]
- Hazra, B.; Narasimhan, S. Gearbox Fault Detection Using Synchro-squeezing Transform. Procedia Eng. 2016, 144, 187–194. [Google Scholar] [CrossRef] [Green Version]
- Zamanian, A.H.; Ohadi, A. Gear fault diagnosis based on Gaussian correlation of vibrations signals and wavelet coefficients. Appl. Soft Comput. J. 2011, 11, 4807–4819. [Google Scholar] [CrossRef] [Green Version]
- Wei, F.; Cai, G.; Zhu, Z.K.; Shen, C.; Huang, W.; Shang, L. Sparse representation of transients in wavelet basis and its application in gearbox fault feature extraction. Mech. Syst. Signal Process. 2015, 5, 230–245. [Google Scholar]
- Kang, M.; Kim, J.; Kim, J.M. Reliable fault diagnosis for incipient low-speed bearings using fault feature analysis based on a binary bat algorithm. Inf. Sci. 2015, 294, 423–438. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Tang, B.; Deng, L.; Liu, Z. Fault diagnosis method using supervised extended local tangent space alignment for dimension reduction. Measurement 2015, 62, 1–14. [Google Scholar] [CrossRef]
- Yu, D.; Wang, M.; Cheng, X. A method for the compound fault diagnosis of gearboxes based on morphological component analysis. Measurement 2016, 91, 519–531. [Google Scholar] [CrossRef]
- Dolenc, B.; Boškoski, P.; Juričić, Đ. Distributed bearing fault diagnosis based on vibration analysis. Mech. Syst. Signal Process. 2016, 66/67, 521–532. [Google Scholar] [CrossRef]
- An, X.; Yang, W.; An, X. Vibration signal analysis of a hydropower unit based on adaptive local iterative filtering. ARCHIVE Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 231, 1339–1353. [Google Scholar] [CrossRef]
- Hu, A.; Yan, X.; Xiang, L. A new wind turbine fault diagnosis method based on ensemble intrinsic time-scale decomposition and WPT-fractal dimension. Renew. Energy 2015, 83, 767–778. [Google Scholar] [CrossRef]
- Zhang, X. Introduction to Statistical Learning Theory and Support Vector Machines. Acta Autom. Sin. 2000, 26, 32–42. [Google Scholar]
- Ben Salem, S.; Bacha, K.; Chaari, A. Support vector machine-based decision for mechanical fault condition monitoring in induction motor using an advanced Hilbert-Park transform. Isa Trans. 2012, 51, 566–572. [Google Scholar] [CrossRef]
- Unal, M.; Onat, M.; Demetgul, M.; Kucuk, H. Fault diagnosis of rolling bearings using a genetic algorithm optimized neural network. Measurement 2014, 58, 187–196. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Kim, J.-M.; Tan, A.C.C.; Kim, E.Y.; Choi, B.-K. Reliable Fault Diagnosis for Low-Speed Bearings Using Individually Trained Support Vector Machines with Kernel Discriminative Feature Analysis. IEEE Trans. Power Electron 2015, 30, 2786–2797. [Google Scholar] [CrossRef] [Green Version]
- Jegadeeshwaran, R.; Sugumaran, V. Fault diagnosis of automobile hydraulic brake system using statistical features and support vector machines. Mech. Syst. Sig. Process. 2015, 52, 436–446. [Google Scholar] [CrossRef]
- Pandya, D.; Upadhyay, S.; Harsha, S. Fault diagnosis of rolling element bearing with intrinsic mode function of acoustic emission data using APF-KNN. Expert Syst. Appl. 2013, 40, 4137–4145. [Google Scholar] [CrossRef]
- Khan, S.; Yairi, T. A review on the application of deep learning in system health management. Mech. Syst. Signal Process. 2018, 107, 241–265. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Feng, J.; Kuo, C.C.J. Deep convolutional neural network for latent fingerprint enhancement. Signal Processing. Image Commun. 2018, 60, 52–63. [Google Scholar] [CrossRef]
- Wang, X.; Wang, T.; Ming, A.; Han, Q.; Li, A. Deep Spatiotemporal Convolutional-Neural-Network-Based Remaining Useful Life Estimation of Bearings. Chin. J. Mech. Eng. 2021, 34, 62. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72–73, 303–315. [Google Scholar] [CrossRef]
- Tra, V.; Kim, J.; Khan, S.A.; Kim, J.M. Bearing Fault Diagnosis under Variable Speed Using Convolutional Neural Networks and the Stochastic Diagonal Levenberg-Marquardt Algorithm. Sensors 2017, 17, 2834. [Google Scholar] [CrossRef] [Green Version]
- Xia, M.; Li, T.; Xu, L.; Liu, L.; De Silva, C.W. Fault Diagnosis for Rotating Machinery Using Multiple Sensors and Convolutional Neural Networks. IEEE/ASME Trans. Mechatron. 2017, 23, 101–110. [Google Scholar] [CrossRef]
- Khan, M.A.; Kim, Y.H.; Choo, J. Intelligent fault detection using raw vibration signals via dilated convolutional neural networks. J. Supercomput. 2018, 76, 8086–8100. [Google Scholar] [CrossRef]
- Kumar, A.; Gandhi, C.P.; Zhou, Y.; Kumar, R.; Xiang, J. Improved deep convolution neural network (CNN) for the identification of defects in the centrifugal pump using acoustic images. Appl. Acoust. 2020, 167, 107399. [Google Scholar] [CrossRef]
- Shao, Y.; Yuan, X.; Zhang, C.; Song, Y.; Xu, Q. A Novel Fault Diagnosis Algorithm for Rolling Bearings Based on One-Dimensional Convolutional Neural Network and INPSO-SVM. Appl. Sci. 2020, 10, 4303. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, X.; Zou, J. The Optimized Deep Belief Networks with Improved Logistic Sigmoid Units and Their Application in Fault Diagnosis for Planetary Gearboxes of Wind Turbines. IEEE Trans. Ind. Electron. 2019, 66, 3814–3824. [Google Scholar] [CrossRef]
- Pan, J.; Zi, Y.; Chen, J.; Zhou, Z.; Wang, B. LiftingNet: A Novel Deep Learning Network with Layerwise Feature Learning from Noisy Mechanical Data for Fault Classification. IEEE Trans. Ind. Electron. 2018, 65, 4973–4982. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, Y.; Tian, Y.; Jiang, L. A novel method based on nonlinear auto-regression neural network and convolutional neural network for imbalanced fault diagnosis of rotating machinery. Measurement 2020, 161, 107880. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Xie, S.; Ren, G.; Zhu, J. Application of a new one-dimensional deep convolutional neural network for intelligent fault diagnosis of rolling bearings. Sci. Prog. 2020, 103, 36850420951394. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity mappings in deep residual networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, the Netherlands, 8–16 October 2016; pp. 630–645. [Google Scholar]
- Lin, M.; Chen, Q.; Yan, S. Network In-Network. 2013. Available online: https://arxiv.org/pdf/1312.4400.pdf (accessed on 1 August 2021).
- Zhao, M.; Tang, B.; Deng, L.; Pecht, M. Multiple Wavelet Regularized Deep Residual Networks for Fault Diagnosis. Measurement 2019, 152, 107331. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Zhao, M.; Kang, M.; Tang, B.; Pecht, M. Deep Residual Networks with Dynamically Weighted Wavelet Coefficients for Fault Diagnosis of Planetary Gearboxes. IEEE Trans. Ind. Electron. 2018, 65, 4290–4300. [Google Scholar] [CrossRef]
- Flach, P. Machine Learning: The Art and Science of Algorithms That Make Sense of Data; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Ouadine, A.Y.; Mjahed, M.; Ayad, H.; El Kari, A. Aircraft Air Compressor Bearing Diagnosis Using Discriminant Analysis and Cooperative Genetic Algorithm and Neural Network Approaches. Appl. Sci. 2018, 8, 2243. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, Z.; Lv, H.; Xu, J.; Huang, Z.; Qin, W. A Deep Learning Method for Bearing Fault Diagnosis through Stacked Residual Dilated Convolutions. Appl. Sci. 2019, 9, 1823. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Residual Block | Parameters of the Convolution Layer | |
|---|---|---|
| Conv1 | Conv2 | |
| Res-block1 | 1, 8, 1 | 1, 8, 1 |
| Res-block2 | 1, 8, 1 | 1, 8, 1 |
| Res-block3 | 1, 16, 1 | 1, 16, 1 |
| Res-block4 | 1, 16, 1 | 1, 16, 1 |
| Res-block5 | 1, 32, 1 | 1, 32, 1 |
| Res-block6 | 1, 32, 1 | 1, 32, 1 |
| Res-block7 | 1, 64, 1 | 1, 64, 1 |
| Res-block8 | 1, 64, 1 | 1, 64, 1 |
| Condition Type | Size of Samples | Sample Number | Label |
|---|---|---|---|
| Ball (0.007") | 1024 | 600 | F1 |
| Ball (0.014") | 1024 | 600 | F2 |
| Ball (0.021") | 1024 | 600 | F3 |
| Inner Race (0.007") | 1024 | 600 | F4 |
| Inner Race (0.014") | 1024 | 600 | F5 |
| Inner Race (0.021") | 1024 | 600 | F6 |
| Outer Race (0.007")@6 | 1024 | 600 | F7 |
| Outer Race (0.014")@6 | 1024 | 600 | F8 |
| Outer Race (0.021")@6 | 1024 | 600 | F9 |
| Normal condition | 1024 | 600 | H0 |
| Method | Testing Accuracy | Training Time per Model | Testing Time per Observation |
|---|---|---|---|
| ResNet + GAP | 99.83% | 228.53 s | 0.193 s |
| ResNet + FC | 98.48% | 245.96 s | 0.270 s |
| Label | Precision (%) | Recall (%) | Observations |
|---|---|---|---|
| H0 | 98.36 | 100 | 600 |
| F1 | 100 | 100 | 600 |
| F2 | 100 | 100 | 600 |
| F3 | 100 | 100 | 600 |
| F4 | 100 | 100 | 600 |
| F5 | 100 | 100 | 600 |
| F6 | 100 | 100 | 600 |
| F7 | 100 | 98 | 600 |
| F8 | 100 | 100 | 600 |
| F9 | 100 | 100 | 600 |
| Average | 99.83 | 99.8 | 600 |
| Diagnosis | The Improved ResNet | The Improved CNN | SVM | KNN | DPBN |
|---|---|---|---|---|---|
| Training time | 228.53 s | 229.53 s | 2.264 s | 0.049 s | 327.09 s |
| Testing time | 0.193 s | 0.198 s | 0.829 s | 1.322 s | 0.141 s |
| Fault category | Accuracy % | ||||
| H0 | 100 | 100 | 100 | 96.25 | 100 |
| F1 | 100 | 100 | 96.72 | 78.00 | 92.86 |
| F2 | 98 | 92.01 | 92.01 | 86.31 | 93.55 |
| F3 | 100 | 98.36 | 98.31 | 90.15 | 98.36 |
| F4 | 98 | 98.36 | 100 | 97.00 | 100 |
| F5 | 100 | 98.33 | 93.25 | 92.85 | 66.59 |
| F6 | 100 | 96.77 | 95.24 | 96.59 | 96.08 |
| F7 | 100 | 100 | 87.32 | 100 | 100 |
| F8 | 100 | 100 | 100 | 100 | 100 |
| F9 | 100 | 98.31 | 78.59 | 81.69 | 75.56 |
| Averages | 99.6 | 98.2 | 94.1 | 91.9 | 92.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, X.; Zheng, Y.; Lu, L.; Pan, H. Research on Intelligent Fault Diagnosis of Rolling Bearing Based on Improved Deep Residual Network. Appl. Sci. 2021, 11, 10889. https://doi.org/10.3390/app112210889
Hao X, Zheng Y, Lu L, Pan H. Research on Intelligent Fault Diagnosis of Rolling Bearing Based on Improved Deep Residual Network. Applied Sciences. 2021; 11(22):10889. https://doi.org/10.3390/app112210889
Chicago/Turabian StyleHao, Xinyu, Yuan Zheng, Li Lu, and Hong Pan. 2021. "Research on Intelligent Fault Diagnosis of Rolling Bearing Based on Improved Deep Residual Network" Applied Sciences 11, no. 22: 10889. https://doi.org/10.3390/app112210889
APA StyleHao, X., Zheng, Y., Lu, L., & Pan, H. (2021). Research on Intelligent Fault Diagnosis of Rolling Bearing Based on Improved Deep Residual Network. Applied Sciences, 11(22), 10889. https://doi.org/10.3390/app112210889