
Modeling and Control of a Microgrid Connected to the INTEC University Campus

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Microgrid Topology and Modes of Operation
3. Modeling of the Microgrid
3.1. PV System
3.2. Wind Turbine and Permanent Magnet Synchronous Generator
3.3. Battery Model
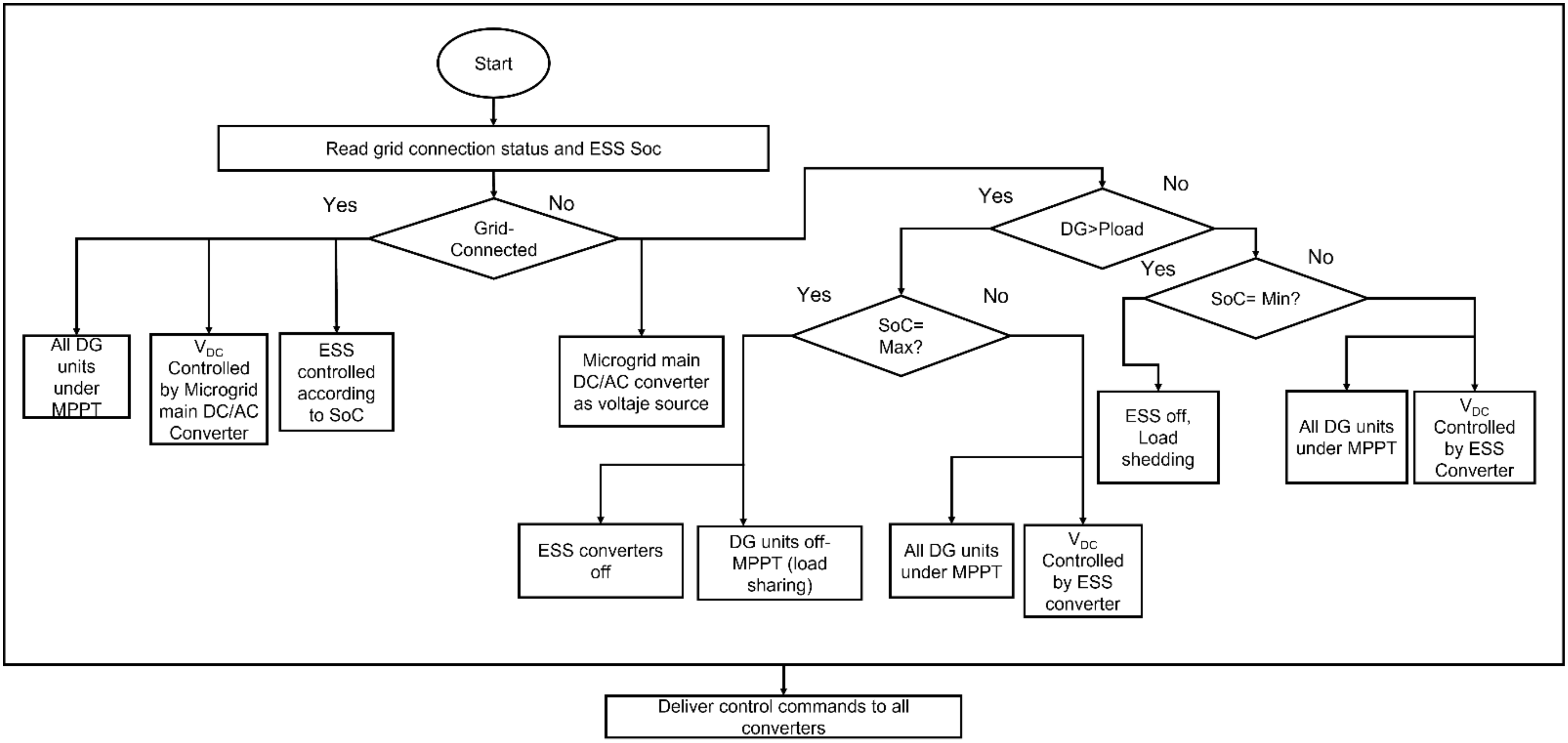
4. Control Strategies
4.1. PV Converter Control
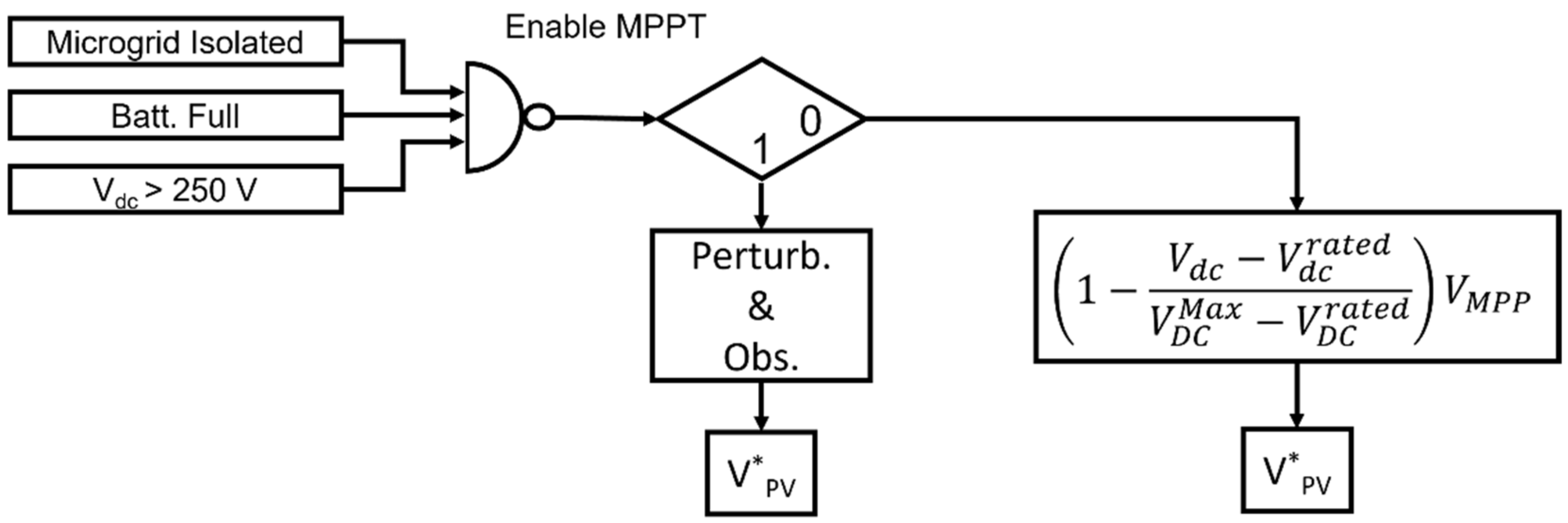
4.1.1. PV Converter MPPT Method
4.1.2. PV Converter Control for Sharing the Microgrid Load Power
4.2. PMSG-Based Wind Turbine Control
4.2.1. Control for Ensuring MPPT
4.2.2. Control for Proportional Load Sharing
4.3. Control of the Microgrid Inverter
4.4. Synchronization with the Electrical Network
5. Operational Scenarios Used for the Validation of the Proposed System
- Interconnected mode, DG > Pload:PPV + PWT = Pload + Pgrid; PESS = 0;
- Interconnected mode, DG = Pload:PPV + PWT = Pload; Pgrid = 0; PESS = 0;
- Interconnected mode, DG < Pload:PPV + PWT + Pgrid = Pload; PESS = 0.
- Isolated mode, DG > Pload, battery not fully charged:PPV + PWT − PESS = Pload; Pgrid = 0, PV, and wind units under MPPT;
- Isolated mode, DG > Pload, battery fully charged:PPV + PWT = Pload; Pgrid = 0; PESS = 0, PV, and wind units under reduced power mode;
- Isolated mode, DG = Pload:PPV + PWT = Pload; Pgrid = 0; PESS = 0, PV, and wind units under MPPT;
- Isolated mode, DG < Pload:PPV + PWT + PESS = Pload; Pgrid = 0, PV, and wind units under MPPT.
6. Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Impram, S.; Varbak Nese, S.; Oral, B. Challenges of renewable energy penetration on power system flexibility: A survey. Energy Strateg. Rev. 2020, 31, 100539. [Google Scholar] [CrossRef]
- Čepin, M. Evaluation of the power system reliability if a nuclear power plant is replaced with wind power plants. Reliab. Eng. Syst. Saf. 2019, 185, 455–464. [Google Scholar] [CrossRef]
- Aybar-Mejía, M.; Villanueva, J.; Mariano-Hernández, D.; Santos, F.; Molina-García, A. A Review of Low-Voltage Renewable Microgrids: Generation Forecasting and Demand-Side Management Strategies. Electronics 2021, 10, 2093. [Google Scholar] [CrossRef]
- Ma, T.; Cintuglu, M.H.; Mohammed, O. Control of hybrid AC/DC microgrid involving energy storage, renewable energy and pulsed loads. In Proceedings of the 2015 IEEE Industry Applications Society Annual Meeting, Addison, TX, USA, 18–22 October 2015; pp. 1–8. [Google Scholar]
- Hosseinzadeh, M.; Salmasi, F.R. Robust Optimal Power Management System for a Hybrid AC/DC Micro-Grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Xu, Y.; Guerrero, J.M. A coordinated control of hybrid ac/dc microgrids with PV-wind-battery under variable generation and load conditions. Int. J. Electr. Power Energy Syst. 2019, 104, 583–592. [Google Scholar] [CrossRef] [Green Version]
- Silva, E.A.; Bradaschia, F.; Cavalcanti, M.C.; Nascimento, A.J. Parameter Estimation Method to Improve the Accuracy of Photovoltaic Electrical Model. IEEE J. Photovolt. 2016, 6, 278–285. [Google Scholar] [CrossRef]
- Slootweg, J.G.; Polinder, H.; Kling, W.L. Dynamic modelling of a wind turbine with doubly fed induction generator. In Proceedings of the 2001 Power Engineering Society Summer Meeting. Conference Proceedings (Cat. No.01CH37262), Vancouver, BC, Canada, 15–19 July 2001; Volume 1, pp. 644–649. [Google Scholar]
- Wijewardana, S.M. New Dynamic Battery Model for Hybrid Vehicles and Dynamic Model Analysis Using Simulink. Eng. J. Inst. Eng. Sri Lanka 2014, 47, 53. [Google Scholar] [CrossRef] [Green Version]
- Zhu, C.; Li, X.; Song, L.; Xiang, L. Development of a theoretically based thermal model for lithium ion battery pack. J. Power Sources 2013, 223, 155–164. [Google Scholar] [CrossRef]
- Mejias, M.A.; Landera, Y.G.; Viltre, L.L. Comparison of maximum power point tracking techniques used in photovoltaic system. ITEGAM-JETIA 2021, 7, 4–12. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; Wiley: Hoboken, NJ, USA, 2007; ISBN 9780470118924. [Google Scholar]
- Limongi, L.R.; Bojoi, R.; Griva, G.; Tenconi, A. Digital current-control schemes. IEEE Ind. Electron. Mag. 2009, 3, 20–31. [Google Scholar] [CrossRef] [Green Version]
- Neto, R.C.; Neves, F.A.S.; de Souza, H.E.P. Complex Controllers Applied to Space Vectors: A Survey on Characteristics and Advantages. J. Control. Autom. Electr. Syst. 2020, 31, 1132–1152. [Google Scholar] [CrossRef]
- Bojrup, M.; Karlsson, P.; Alaküla, M.; Gertmar, L. Multiple Rotating Integrator Controller for Active Filters. In Proceedings of the EPE 99 Conference, Lausanne, Switzerland, 7–9 September 1999. [Google Scholar]
- Yuan, X.; Allmeling, J.; Merk, W.; Stemmler, H. Stationary frame generalized integrators for current control of active power filters with zero steady state error for current harmonics of concern under unbalanced and distorted operation conditions. In Proceedings of the Conference Record of the 2000 IEEE Industry Applications Conference. Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No.00CH37129), Rome, Italy, 8–12 October 2000; Volume 4, pp. 2143–2150. [Google Scholar]
- Lascu, C.; Asiminoaei, L.; Boldea, I.; Blaabjerg, F. High Performance Current Controller for Selective Harmonic Compensation in Active Power Filters. IEEE Trans. Power Electron. 2007, 22, 1826–1835. [Google Scholar] [CrossRef]
- Neves, F.A.S.; Arcanjo, M.A.C.; Azevedo, G.M.S.; de Souza, H.E.P.; Viltre, L.T.L. The SVFT-Based Control. IEEE Trans. Ind. Electron. 2014, 61, 4152–4160. [Google Scholar] [CrossRef]
- Escobar, G.; Hernandez-Briones, P.G.; Martinez, P.R.; Hernandez-Gomez, M.; Torres-Olguin, R.E. A Repetitive-Based Controller for the Compensation of 6ℓ±1 Harmonic Components. IEEE Trans. Ind. Electron. 2008, 55, 3150–3158. [Google Scholar] [CrossRef]
- Luo, Z.; Su, M.; Yang, J.; Sun, Y.; Hou, X.; Guerrero, J.M. A Repetitive Control Scheme Aimed at Compensating the 6k + 1 Harmonics for a Three-Phase Hybrid Active Filter. Energies 2016, 9, 787. [Google Scholar] [CrossRef] [Green Version]
- Zimann, F.J.; Neto, R.C.; Neves, F.A.S.; de Souza, H.E.P.; Batschauer, A.L.; Rech, C. A Complex Repetitive Controller Based on the Generalized Delayed Signal Cancelation Method. IEEE Trans. Ind. Electron. 2019, 66, 2857–2867. [Google Scholar] [CrossRef]
- Neto, R.C.; Neves, F.A.S.; de Souza, H.E.P. Complex nk+m Repetitive Controller Applied to Space Vectors: Advantages and Stability Analysis. IEEE Trans. Power Electron. 2021, 36, 3573–3590. [Google Scholar] [CrossRef]
- Kaura, V.; Blasko, V. Operation of a phase locked loop system under distorted utility conditions. IEEE Trans. Ind. Appl. 1997, 33, 58–63. [Google Scholar] [CrossRef]
- Chung, S.-K. A phase tracking system for three phase utility interface inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef] [Green Version]
- Golestan, S.; Monfared, M.; Freijedo, F.D. Design-Oriented Study of Advanced Synchronous Reference Frame Phase-Locked Loops. IEEE Trans. Power Electron. 2013, 28, 765–778. [Google Scholar] [CrossRef]
- Neves, F.A.S.; Cavalcanti, M.C.; de Souza, H.E.P.; Bradaschia, F.; Bueno, E.J.; Rizo, M. A Generalized Delayed Signal Cancellation Method for Detecting Fundamental-Frequency Positive-Sequence Three-Phase Signals. IEEE Trans. Power Deliv. 2010, 25, 1816–1825. [Google Scholar] [CrossRef]
- Neves, F.A.S.; de Souza, H.E.P.; Cavalcanti, M.C.; Peña, E. Low effort digital filters for fast sequence components separation of unbalanced and distorted three-phase signals. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 2927–2932. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Feature |
|---|---|
| One-diode model | Considers the photogenerated current and the diffusion diode current, which correspond to the electronic conduction phenomena in the neutral zone of the semiconductor. |
| Series resistance | Represents the losses of the metal contacts of the module. |
| Parallel resistance | Represents losses from eddy currents circulating in the module. |
| Diode | Represents the recombination of carriers in the semiconductor charge zone. |
| Current generated by the PV cell. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aybar-Mejía, M.; León-Viltre, L.; Santos, F.; Neves, F.; Gómez, V.A.; Mariano-Hernández, D. Modeling and Control of a Microgrid Connected to the INTEC University Campus. Appl. Sci. 2021, 11, 11355. https://doi.org/10.3390/app112311355
Aybar-Mejía M, León-Viltre L, Santos F, Neves F, Gómez VA, Mariano-Hernández D. Modeling and Control of a Microgrid Connected to the INTEC University Campus. Applied Sciences. 2021; 11(23):11355. https://doi.org/10.3390/app112311355
Chicago/Turabian StyleAybar-Mejía, Miguel, Lesyani León-Viltre, Félix Santos, Francisco Neves, Víctor Alonso Gómez, and Deyslen Mariano-Hernández. 2021. "Modeling and Control of a Microgrid Connected to the INTEC University Campus" Applied Sciences 11, no. 23: 11355. https://doi.org/10.3390/app112311355
APA StyleAybar-Mejía, M., León-Viltre, L., Santos, F., Neves, F., Gómez, V. A., & Mariano-Hernández, D. (2021). Modeling and Control of a Microgrid Connected to the INTEC University Campus. Applied Sciences, 11(23), 11355. https://doi.org/10.3390/app112311355