
Enhanced Sensitivity of FeGa Thin-Film Coated SAW Current Sensor


Abstract
:1. Introduction
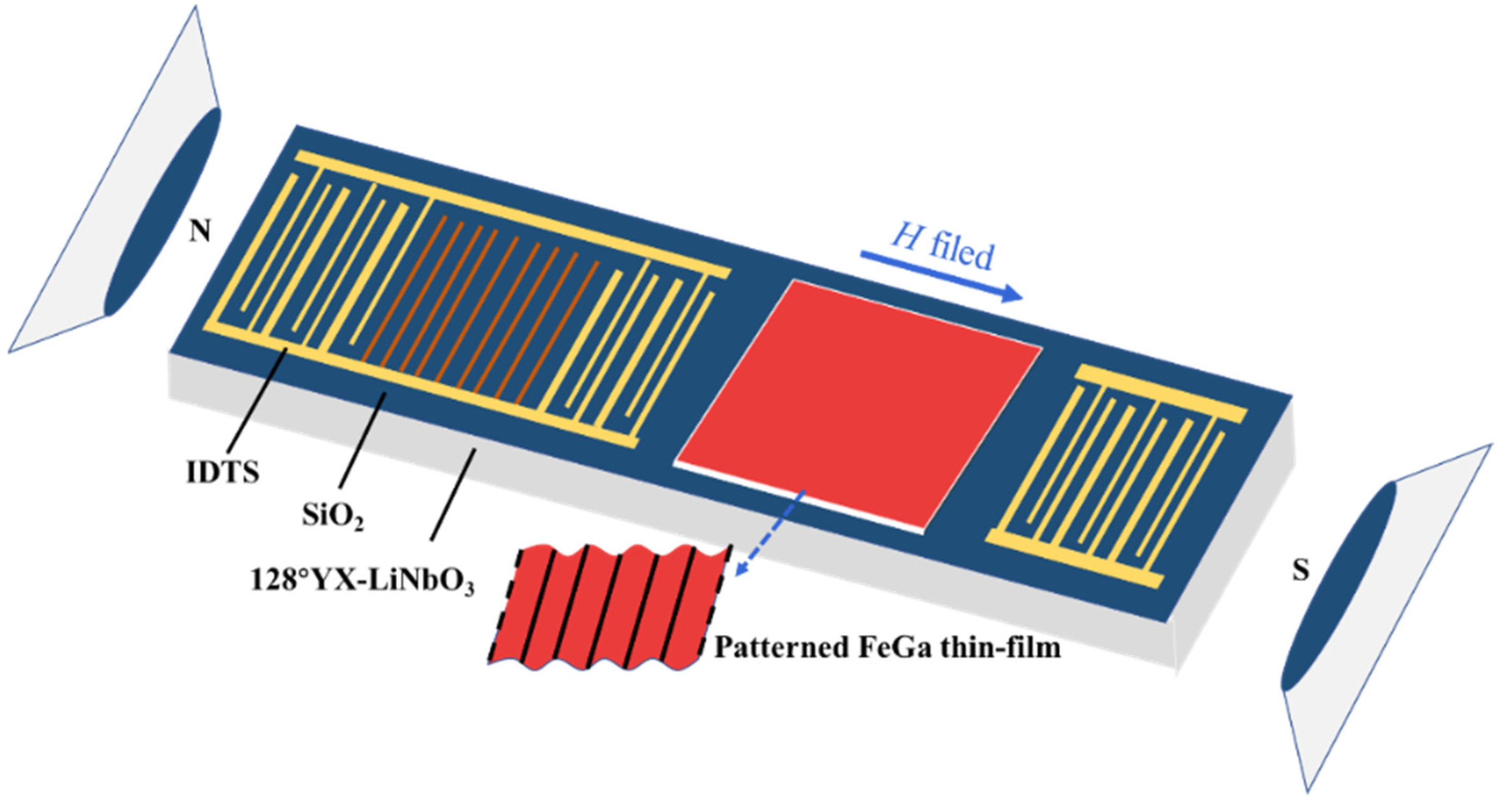
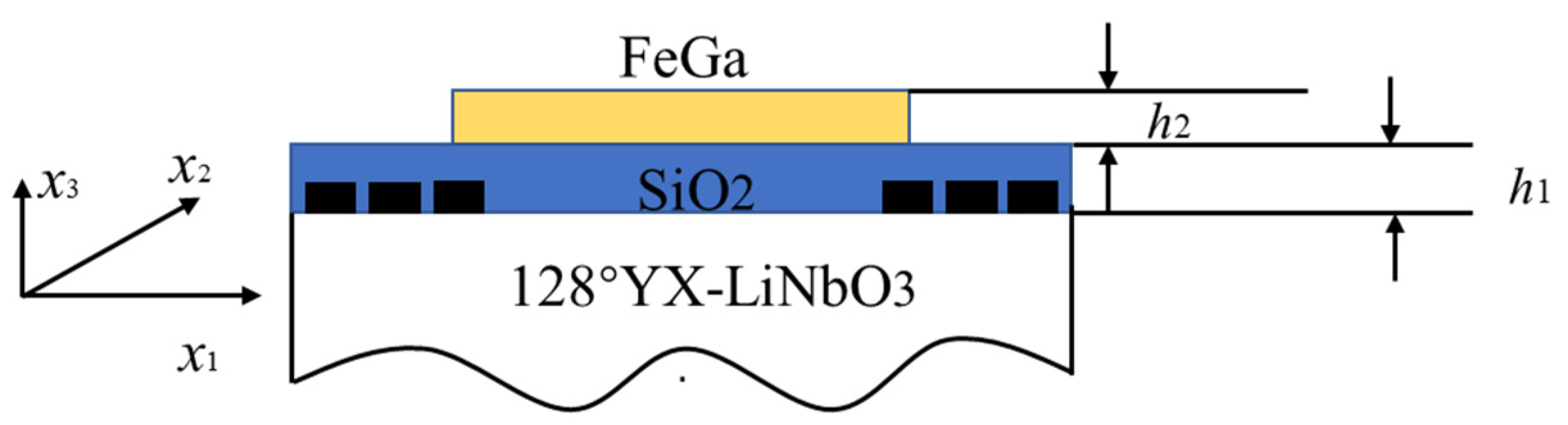
2. Working Principle
- (1)
- In the piezoelectric media
- (2)
- In the SiO2 media,
- (3)
- In the FeGa media,
- (4)
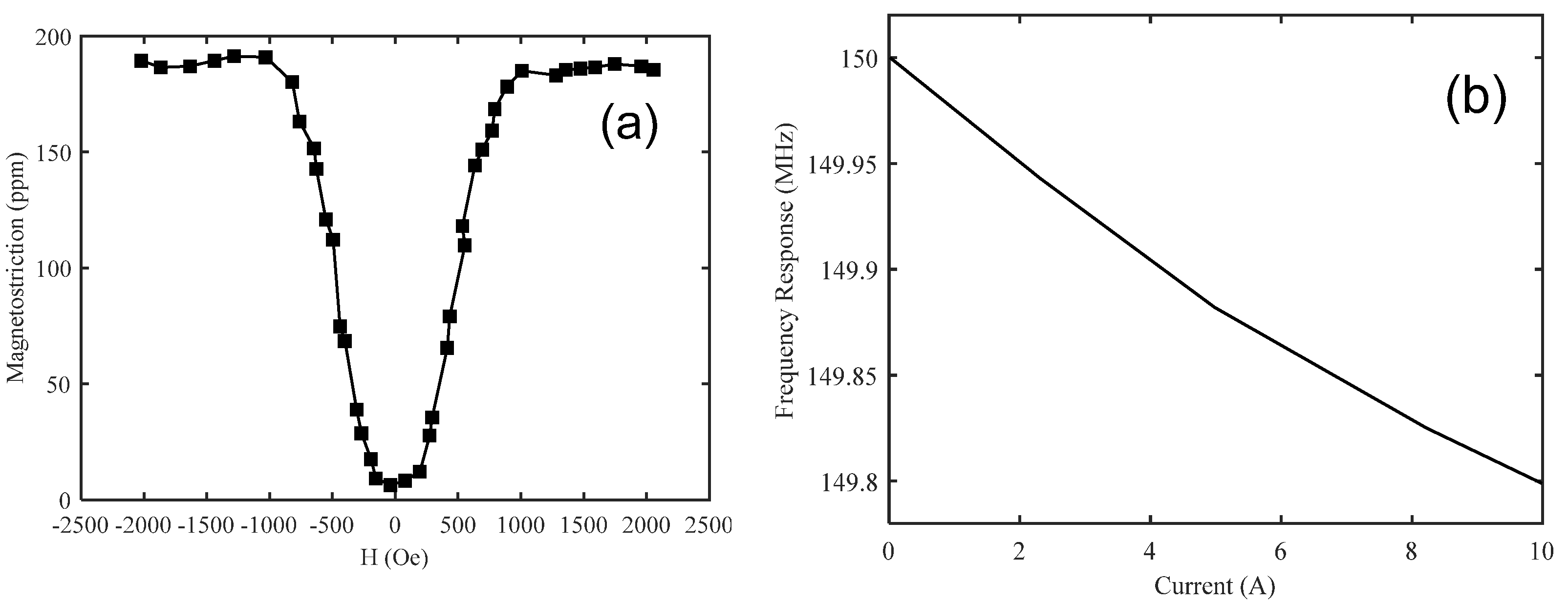
- Magnetostrictive strain of the FeGa film
- (5)
- ΔE effect on the FeGa film
3. Technical Realizations
3.1. SAW Devices
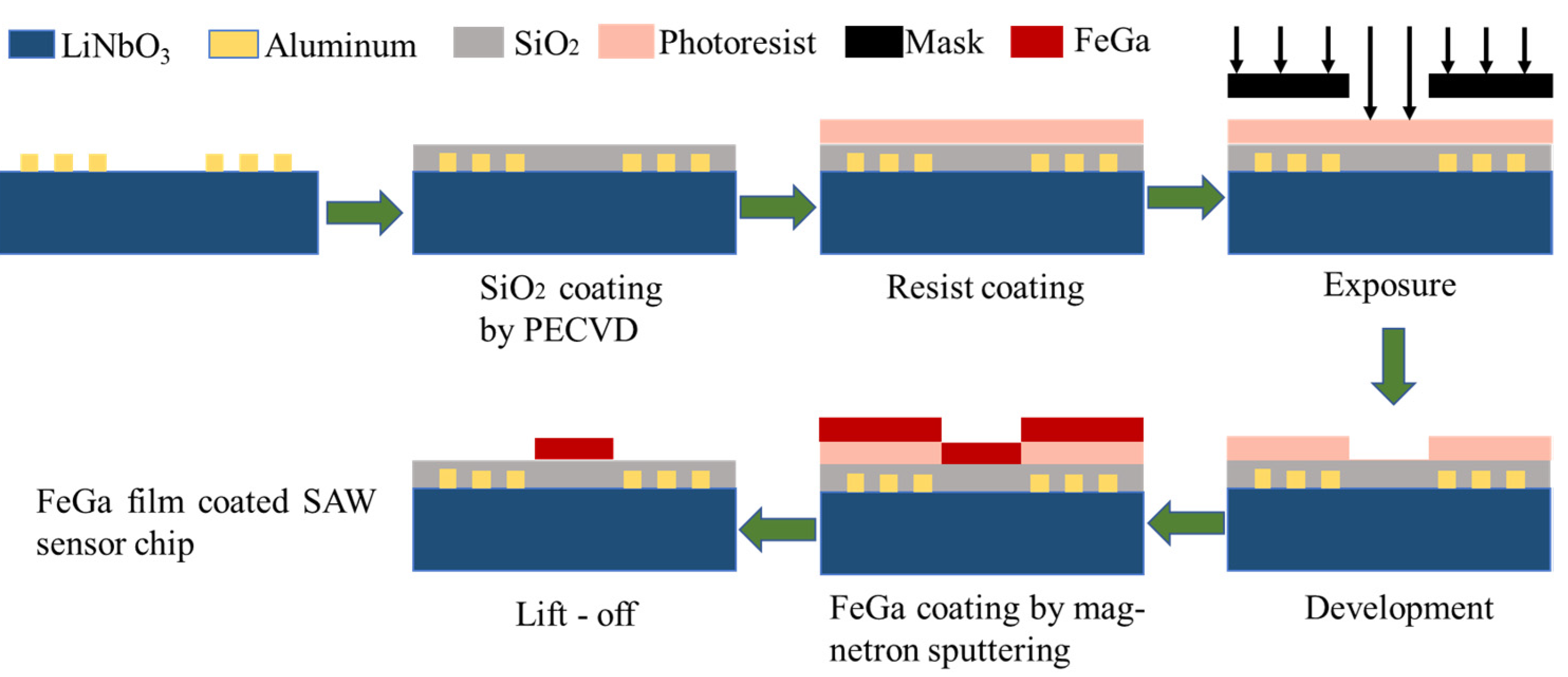
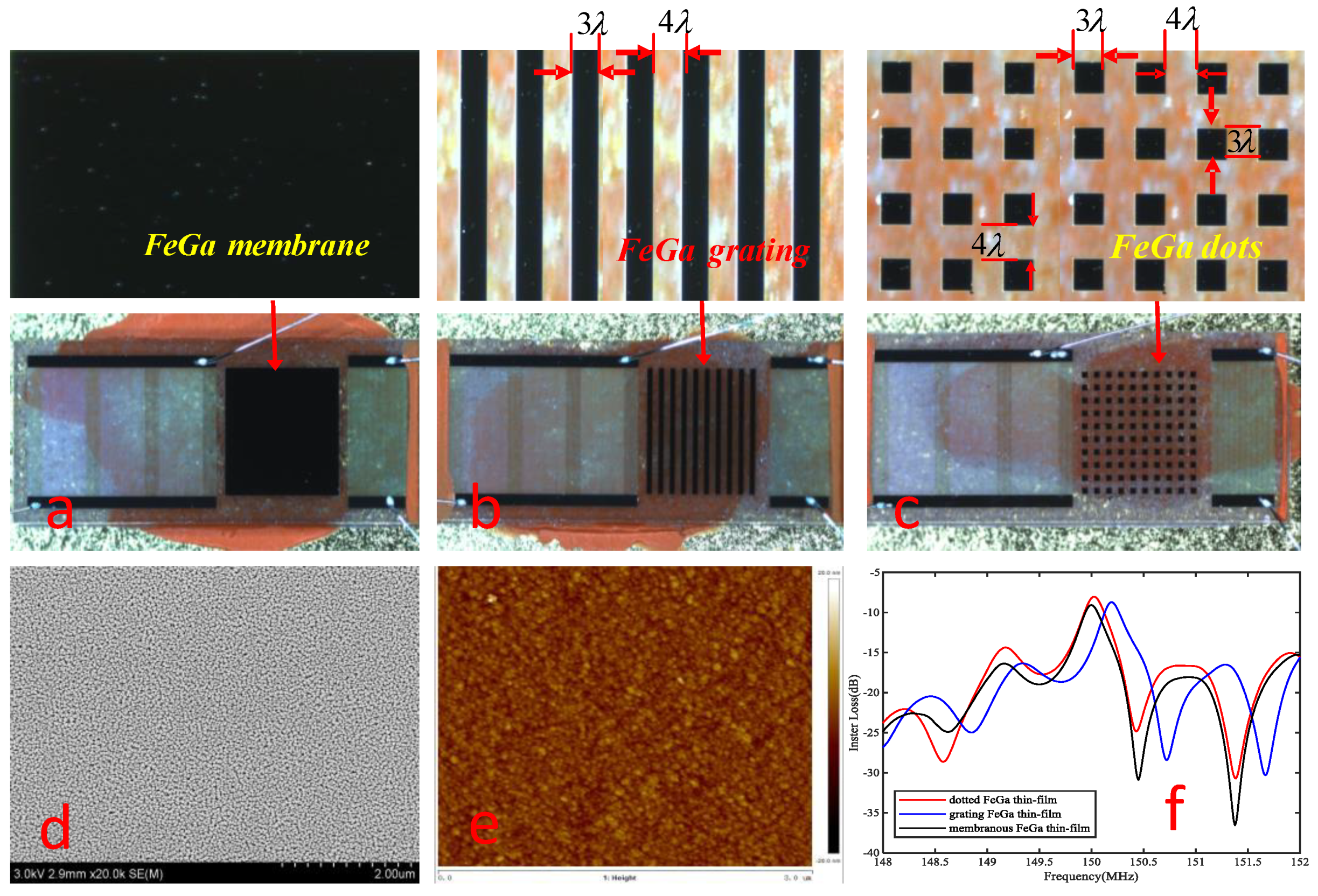
3.2. Preparation of FeGa Film
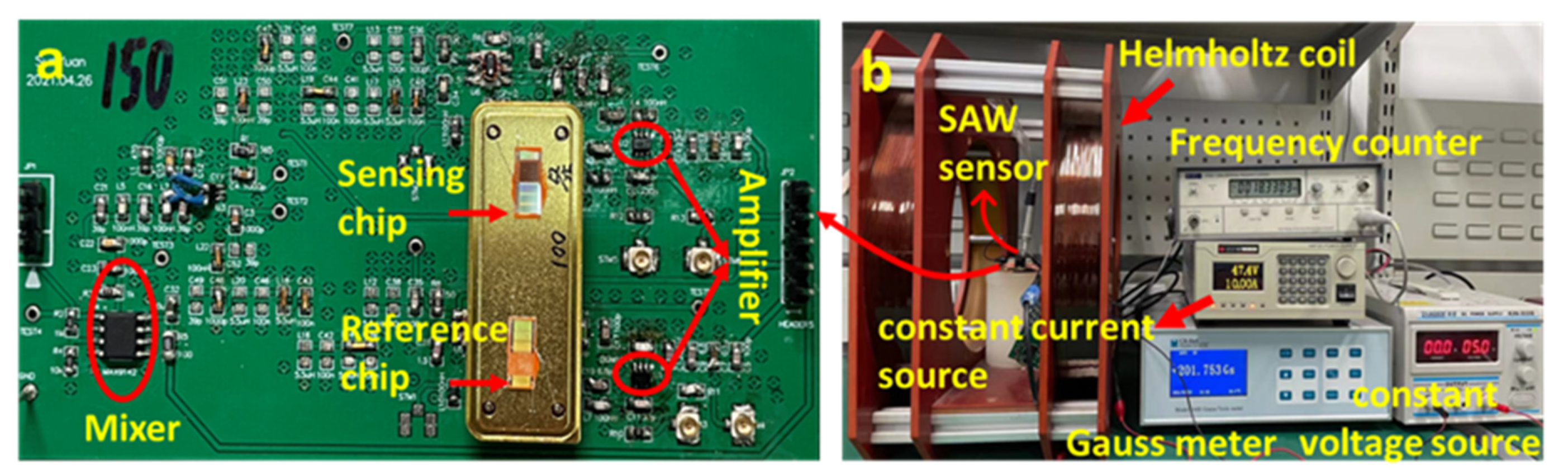
3.3. Differential Oscillator
4. Sensor Experiments and Discussions
4.1. Experimental Setup
4.2. Sensor Performance Evaluation
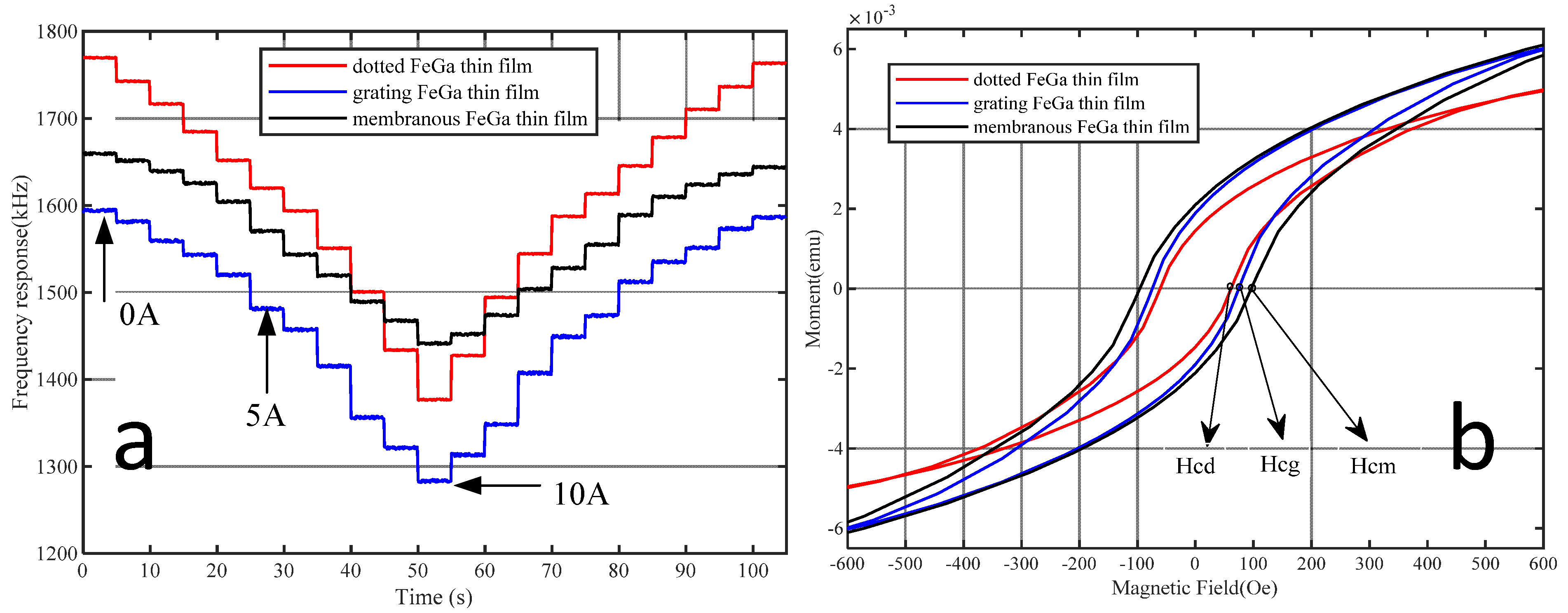
4.2.1. Sensitivity Evaluation
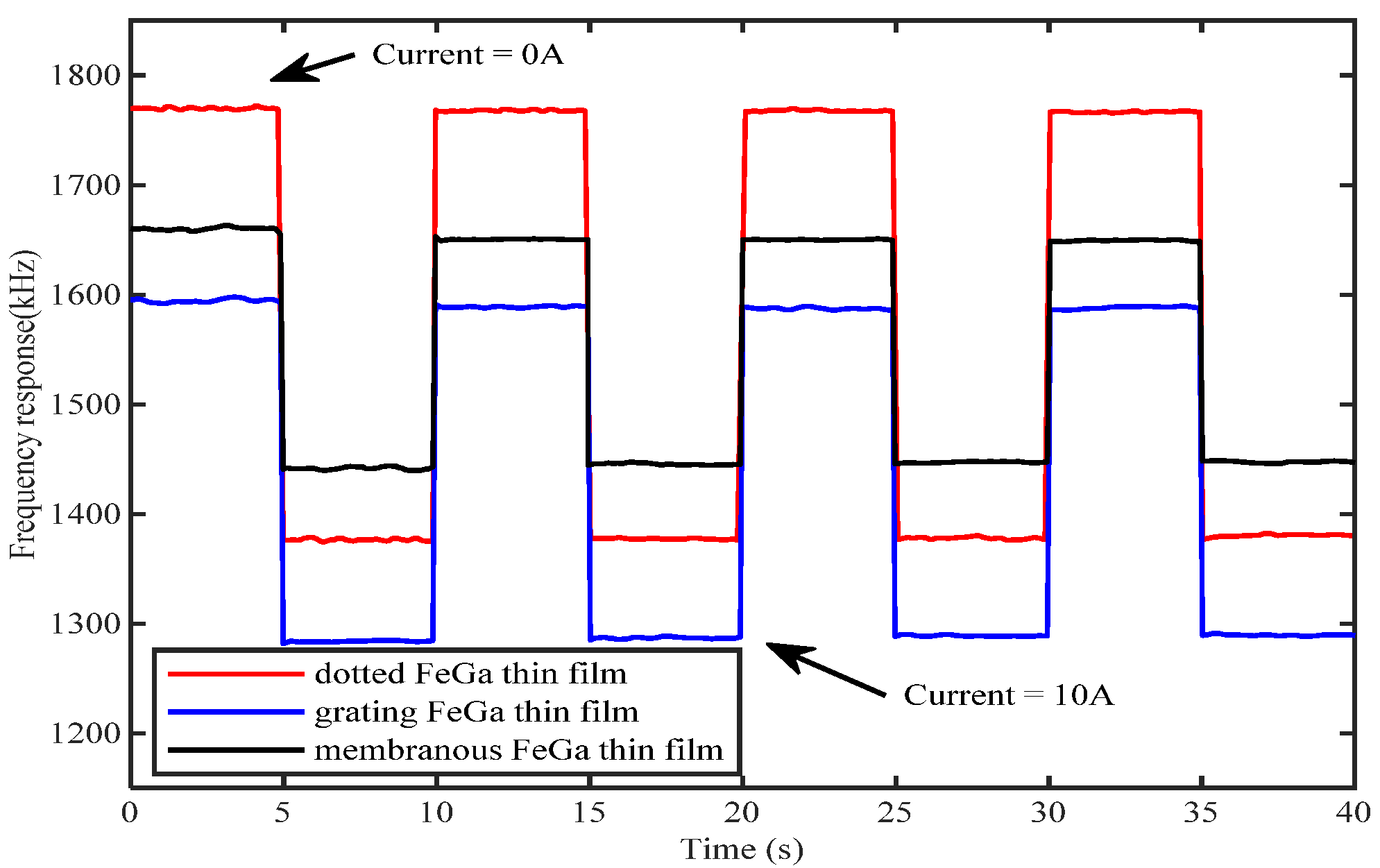
4.2.2. Repeatability Test
4.2.3. Hysteresis Measurement
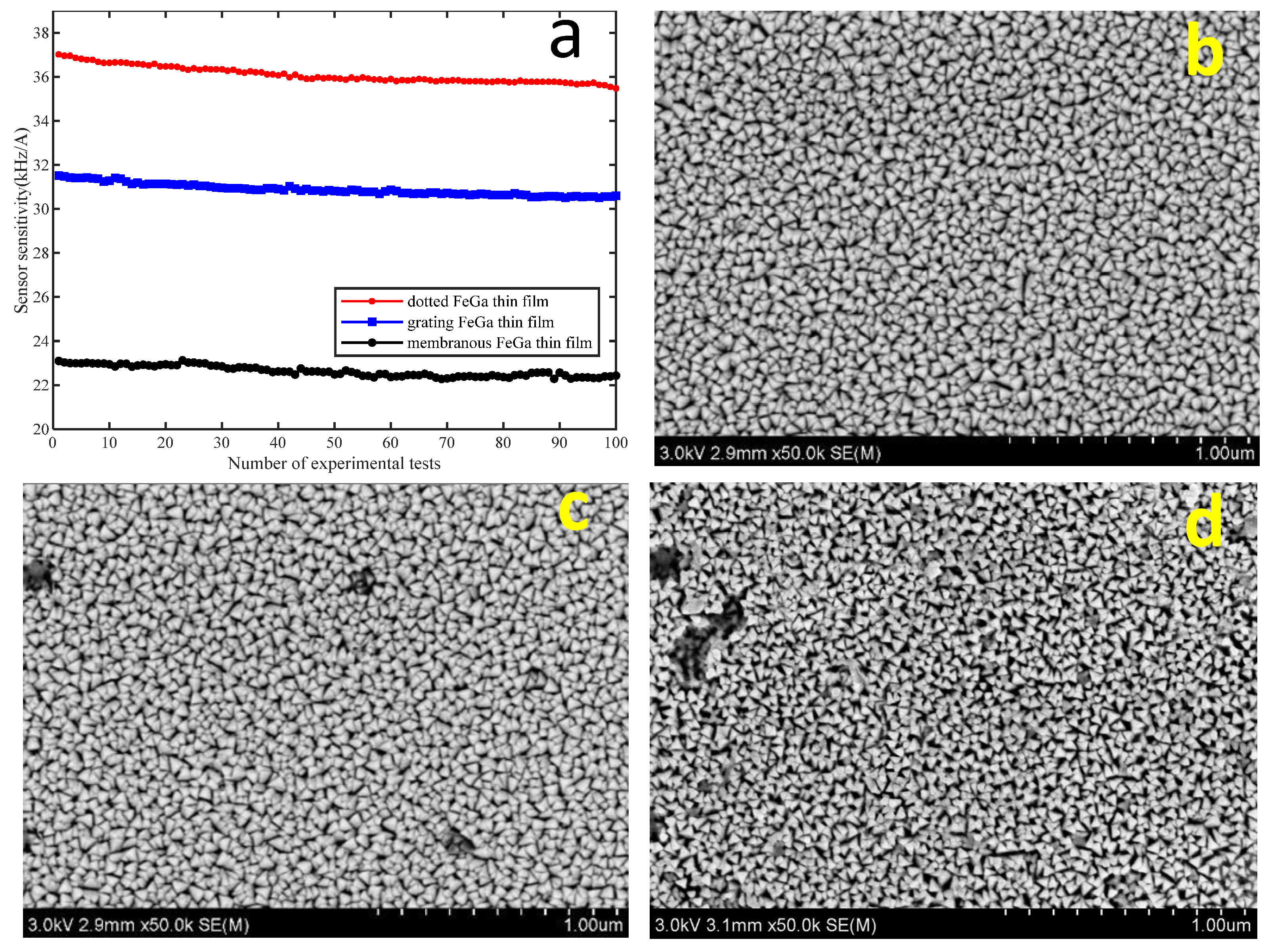
4.2.4. Fatigue Characteristics
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, W.; Jia, Y.; Liu, X.; Liang, Y.; Xue, X.; Du, Z. Enhanced Sensitivity of Temperature-Compensated SAW-Based Current Sensor Using the Magnetostrictive Effect. Smart Mater. Struct. 2016, 26, 025008. [Google Scholar] [CrossRef]
- Ganguly, A.K.; Davis, K.L.; Webb, D.C.; Vittoria, C. Magnetoelastic Surface Waves in a Magnetic Film–Piezoelectric Substrate Configuration. J. Appl. Phys. 1976, 47, 2696–2704. [Google Scholar] [CrossRef]
- Elhosni, M.; Elmazria, O.; Petit-Watelot, S.; Bouvot, L.; Zhgoon, S.; Talbi, A.; Hehn, M.; Aissa, K.A.; Hage-Ali, S.; Lacour, D.; et al. Magnetic Field SAW Sensors Based on Magnetostrictive-Piezoelectric Layered Structures: FEM Modeling and Experimental Validation. Sens. Actuators A Phys. 2016, 240, 41–49. [Google Scholar] [CrossRef] [Green Version]
- Kittmann, A.; Durdaut, P.; Zabel, S.; Reermann, J.; Schmalz, J.; Spetzler, B.; Meyners, D.; Sun, N.X.; McCord, J.; Gerken, M.; et al. Wide Band Low Noise Love Wave Magnetic Field Sensor System. Sci. Rep. 2018, 8, 278. [Google Scholar] [CrossRef] [Green Version]
- Steindl, R.; Hausleitner, C.; Pohl, A.; Hauser, H.; Nicolics, J. Passive Wirelessly Requestable Sensors for Magnetic Field Measurements. Sens. Actuators A Phys. 2000, 85, 169–174. [Google Scholar] [CrossRef]
- Reindl, L.; Scholl, G.; Ostertag, T.; Ruppel, C.C.W.; Bulst, W.-E.; Seifert, F. SAW Devices as Wireless Passive Sensors. In Proceedings of the 1996 IEEE Ultrasonics Symposium, Proceedings, San Antonio, TX, USA, 3–6 November 1996; Volume 1, pp. 363–367. [Google Scholar] [CrossRef]
- Pohl, A. A Review of Wireless SAW Sensors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 317–332. [Google Scholar] [CrossRef]
- Wang, W.; Jia, Y.; Xue, X.; Liang, Y.; Du, Z. Grating-Patterned FeCo Coated Surface Acoustic Wave Device for Sensing Magnetic Field. AIP Adv. 2018, 8, 15134. [Google Scholar] [CrossRef]
- Wang, W.; Jia, Y.; Xue, X.; Liang, Y.; Du, Z. Magnetostrictive Effect in Micro-Dotted FeCo Film Coated Surface Acoustic Wave Devices. Smart Mater. Struct. 2018, 27, 105040. [Google Scholar] [CrossRef]
- Ganguly, A.K.; Davis, K.L.; Webb, D.C.; Vittoria, C.; Forester, D.W. Magnetically Tuned Surface-Acoustic-Wave Phase Shifter. Electron. Lett. 1975, 11, 610–611. [Google Scholar] [CrossRef]
- Tong, J.; Jia, Y.; Wang, W.; Wang, Y.; Wang, S.; Liu, X.; Lei, Y. Development of a Magnetostrictive FeNi Coated Surface Acoustic Wave Current Sensor. Appl. Sci. 2017, 7, 755. [Google Scholar] [CrossRef] [Green Version]
- Kadota, M.; Ito, S. Sensitivity of Surface Acoustic Wave Magnetic Sensors Composed of Various Ni Electrode Structures. Jpn. J. Appl. Phys. 2012, 51, 07GC21. [Google Scholar] [CrossRef]
- Zhou, H.; Talbi, A.; Tiercelin, N.; Bou Matar, O. Multilayer Magnetostrictive Structure Based Surface Acoustic Wave Devices. Appl. Phys. Lett. 2014, 104, 114101. [Google Scholar] [CrossRef]
- Rajput, P.; Kumar, J.; Nimal, A.T. A Simple and Novel SAW Magnetic Sensor with PVA Bound Magnetostrictive Nanopowder Film. Sens. Actuators A Phys. 2021, 331, 112926. [Google Scholar] [CrossRef]
- Dong, S.; Li, J.-F.; Viehland, D. Ultrahigh Magnetic Field Sensitivity in Laminates of TERFENOL-D and Pb(Mg1/3Nb2/3)O3–PbTiO3 Crystals. Appl. Phys. Lett. 2003, 83, 2265–2267. [Google Scholar] [CrossRef] [Green Version]
- Schell, V.; Müller, C.; Durdaut, P.; Kittmann, A.; Thormählen, L.; Lofink, F.; Meyners, D.; Höft, M.; McCord, J.; Quandt, E. Magnetic Anisotropy Controlled FeCoSiB Thin Films for Surface Acoustic Wave Magnetic Field Sensors. Appl. Phys. Lett. 2020, 116, 73503. [Google Scholar] [CrossRef]
- Nan, T.; Hui, Y.; Rinaldi, M.; Sun, N.X. Self-Biased 215MHz Magnetoelectric NEMS Resonator for Ultra-Sensitive DC Magnetic Field Detection. Sci. Rep. 2013, 3, 1985. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Mishra, H.; Han, T.; Hage-Ali, S.; Hehn, M.; Elmazria, O. Sensing Mechanism of Surface Acoustic Wave Magnetic Field Sensors Based on Ferromagnetic Films. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 2566–2575. [Google Scholar] [CrossRef]
- Li, W.; Dhagat, P.; Jander, A. Surface Acoustic Wave Magnetic Sensor Using Galfenol Thin Film. IEEE Trans. Magn. 2012, 48, 4100–4102. [Google Scholar] [CrossRef]
- Ueno, T.; Summers, E.; Wun-Fogle, M.; Higuchi, T. Micro-Magnetostrictive Vibrator Using Iron–Gallium Alloy. Sens. Actuators A Phys. 2008, 148, 280–284. [Google Scholar] [CrossRef]
- Clark, A.E.; Hathaway, K.B.; Wun-Fogle, M.; Restorff, J.B.; Lograsso, T.A.; Keppens, V.M.; Petculescu, G.; Taylor, R.A. Extraordinary Magnetoelasticity and Lattice Softening in Bcc Fe-Ga Alloys. J. Appl. Phys. 2003, 93, 8621–8623. [Google Scholar] [CrossRef] [Green Version]
- Estrine, E.C.; Robbins, W.P.; Maqableh, M.M.; Stadler, B.J.H. Electrodeposition and Characterization of Magnetostrictive Galfenol (FeGa) Thin Films for Use in Microelectromechanical Systems. J. Appl. Phys. 2013, 113, 17A937. [Google Scholar] [CrossRef]
- Reddy, K.S.M.; Maqableh, M.M.; Stadler, B.J.H. Epitaxial Fe(1 − x) Gax /GaAs Structures via Electrochemistry for Spintronics Applications. J. Appl. Phys. 2012, 111, 07E502. [Google Scholar] [CrossRef]
- Pyati, V.P. Simplified Biot-Savart Law for Planar Circuits. IEEE Trans. Educ. 1986, E-29, 32–33. [Google Scholar] [CrossRef] [Green Version]
- Wen, W.; Shitang, H.; Shunzhou, L.; Minghua, L.; Yong, P. Enhanced Sensitivity of SAW Gas Sensor Coated Molecularly Imprinted Polymer Incorporating High Frequency Stability Oscillator. Sens. Actuators B Chem. 2007, 125, 422–427. [Google Scholar] [CrossRef]
- Ou-Yang, J.; Liu, X.; Zhou, H.; Zou, Z.; Yang, Y.; Li, J.; Zhang, Y.; Zhu, B.; Chen, S.; Yang, X. Magnetoelectric Laminate Composites: An Overview of Methods for Improving the DC and Low-Frequency Response. J. Phys. D Appl. Phys. 2018, 51, 324005. [Google Scholar] [CrossRef]
- Zhai, J.; Xing, Z.; Dong, S.; Li, J.; Viehland, D. Magnetoelectric Laminate Composites: An Overview. J. Am. Ceram. Soc. 2008, 91, 351–358. [Google Scholar] [CrossRef]
- Xing, Z.; Zhai, J.; Li, J.; Viehland, D. Investigation of External Noise and Its Rejection in Magnetoelectric Sensor Design. J. Appl. Phys. 2009, 106, 24512. [Google Scholar] [CrossRef] [Green Version]
- Tiersten, H.F.; Sinha, B.K. A Perturbation Analysis of the Attenuation and Dispersion of Surface Waves. J. Appl. Phys. 1978, 49, 87–95. [Google Scholar] [CrossRef]
- Jia, Y.; Wang, W.; Sun, Y.; Liu, M.; Xue, X.; Liang, Y.; Du, Z.; Luo, J. Fatigue Characteristics of Magnetostrictive Thin-Film Coated Surface Acoustic Wave Devices for Sensing Magnetic Field. IEEE Access 2020, 8, 38347–38354. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAW Sensing Devices | Magnetosrictive Film | Sensitivity (kHz/A) | Hysteresis Error |
|---|---|---|---|
| membranous -film | FeGa | 23.1 | 2.57% |
| grate-film | FeGa | 32.2 | 0.92% |
| dot-film | FeGa | 37.9 | 0.81% |
| Year | Material | Frequency | Sensitivity | Reference |
|---|---|---|---|---|
| 2017 | FeNi | 150 MHz | 10.7 kHz/A (5.35 kHz/mT) | [11] |
| 2020 | FeCo | 150 MHz | 10.7 kHz/mT | [30] |
| 2021 | PVA bound Fe | 433 MHz | 678 kHz/120 mT | [14] |
| FeGa | 150 MHz | 37.9 kHz/A (18.95 kHz/mT) | our work |
| Devices | Sensitivity Decrease Rate after Long-Term Runs | ||
|---|---|---|---|
| 0 | 50 | 100 | |
| membranous-film | 0 | 2.26% | 3.6% |
| grate-film | 0 | 2.23% | 3.2% |
| dot-film | 0 | 2.93% | 3.91% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Jia, Y.; Zhang, Y.; Cheng, L.; Liang, Y.; Wang, W. Enhanced Sensitivity of FeGa Thin-Film Coated SAW Current Sensor. Appl. Sci. 2021, 11, 11726. https://doi.org/10.3390/app112411726
Sun Y, Jia Y, Zhang Y, Cheng L, Liang Y, Wang W. Enhanced Sensitivity of FeGa Thin-Film Coated SAW Current Sensor. Applied Sciences. 2021; 11(24):11726. https://doi.org/10.3390/app112411726
Chicago/Turabian StyleSun, Yuan, Yana Jia, Yufeng Zhang, Lina Cheng, Yong Liang, and Wen Wang. 2021. "Enhanced Sensitivity of FeGa Thin-Film Coated SAW Current Sensor" Applied Sciences 11, no. 24: 11726. https://doi.org/10.3390/app112411726
APA StyleSun, Y., Jia, Y., Zhang, Y., Cheng, L., Liang, Y., & Wang, W. (2021). Enhanced Sensitivity of FeGa Thin-Film Coated SAW Current Sensor. Applied Sciences, 11(24), 11726. https://doi.org/10.3390/app112411726