
The Study of Generalized Synchronization between Two Identical Neurons Based on the Laplace Transform Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. GS between Two FHN Neurons
2.1. GS in Unidirectionally Coupled FHN Neurons
2.2. Necessary Conditions for GS between Two FHN Neurons
2.3. Sufficient Conditions for GS in System (3)
- (1)
- ;
- (2)
- For (), and g are continuous;
- (3)
- For any , .
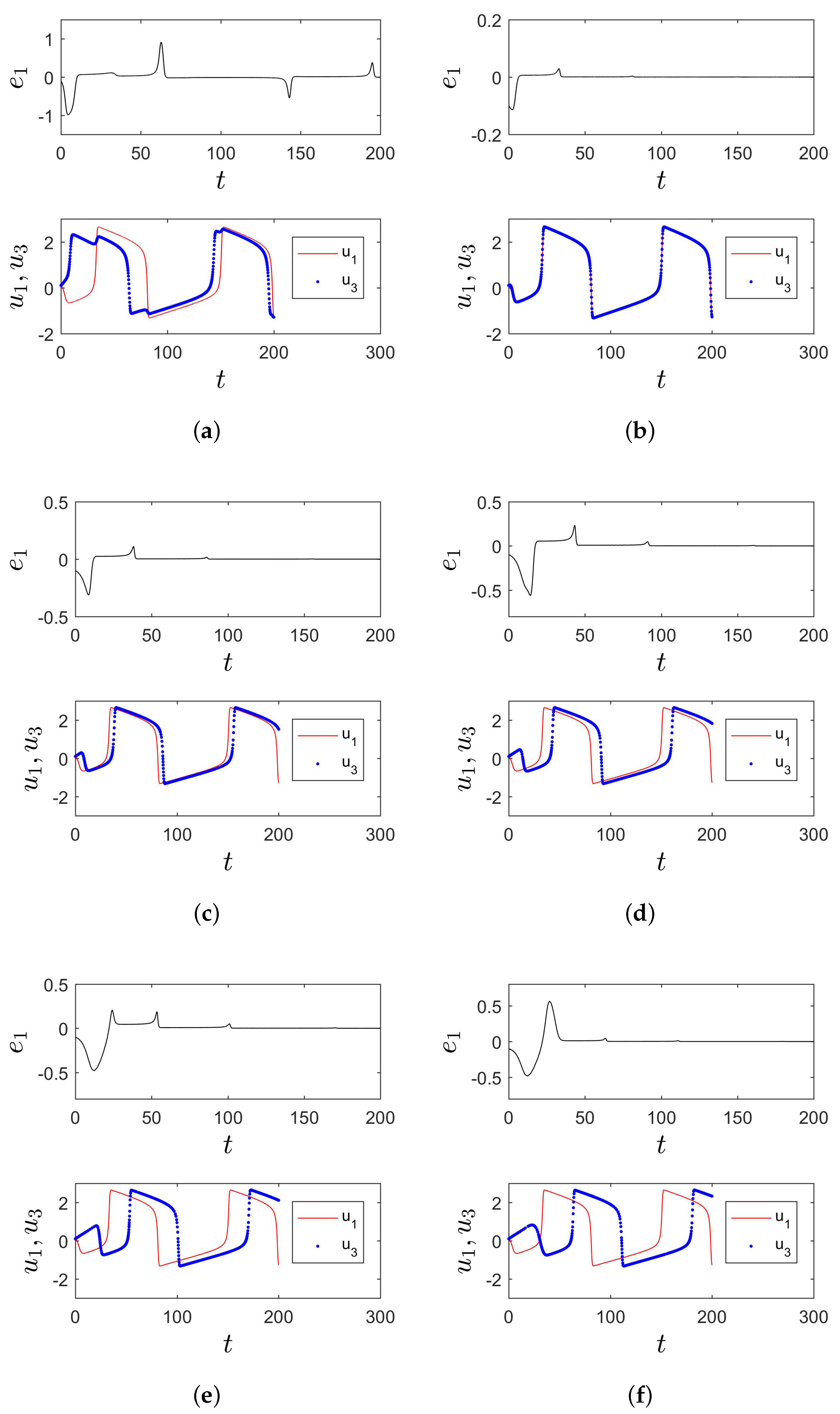
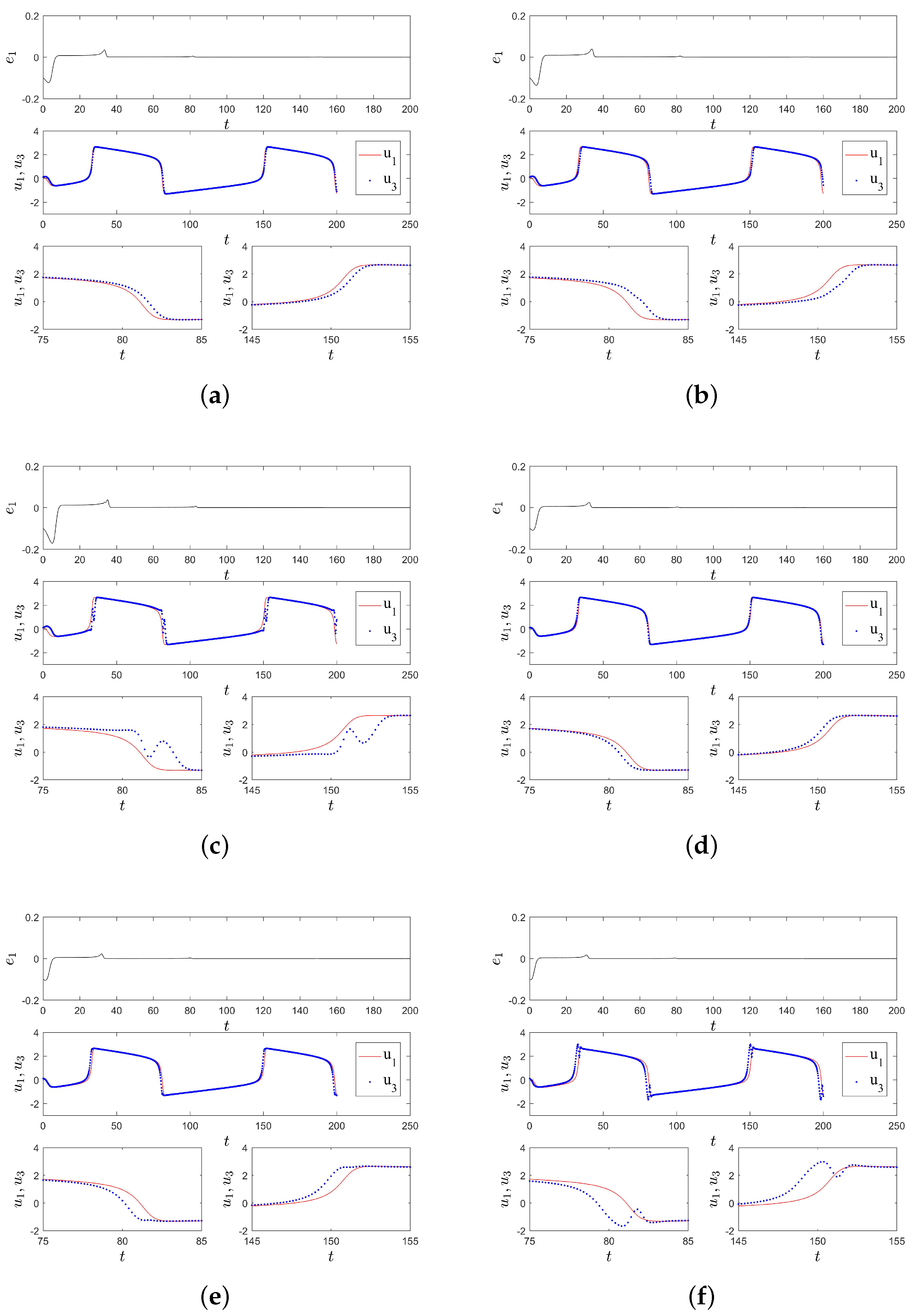
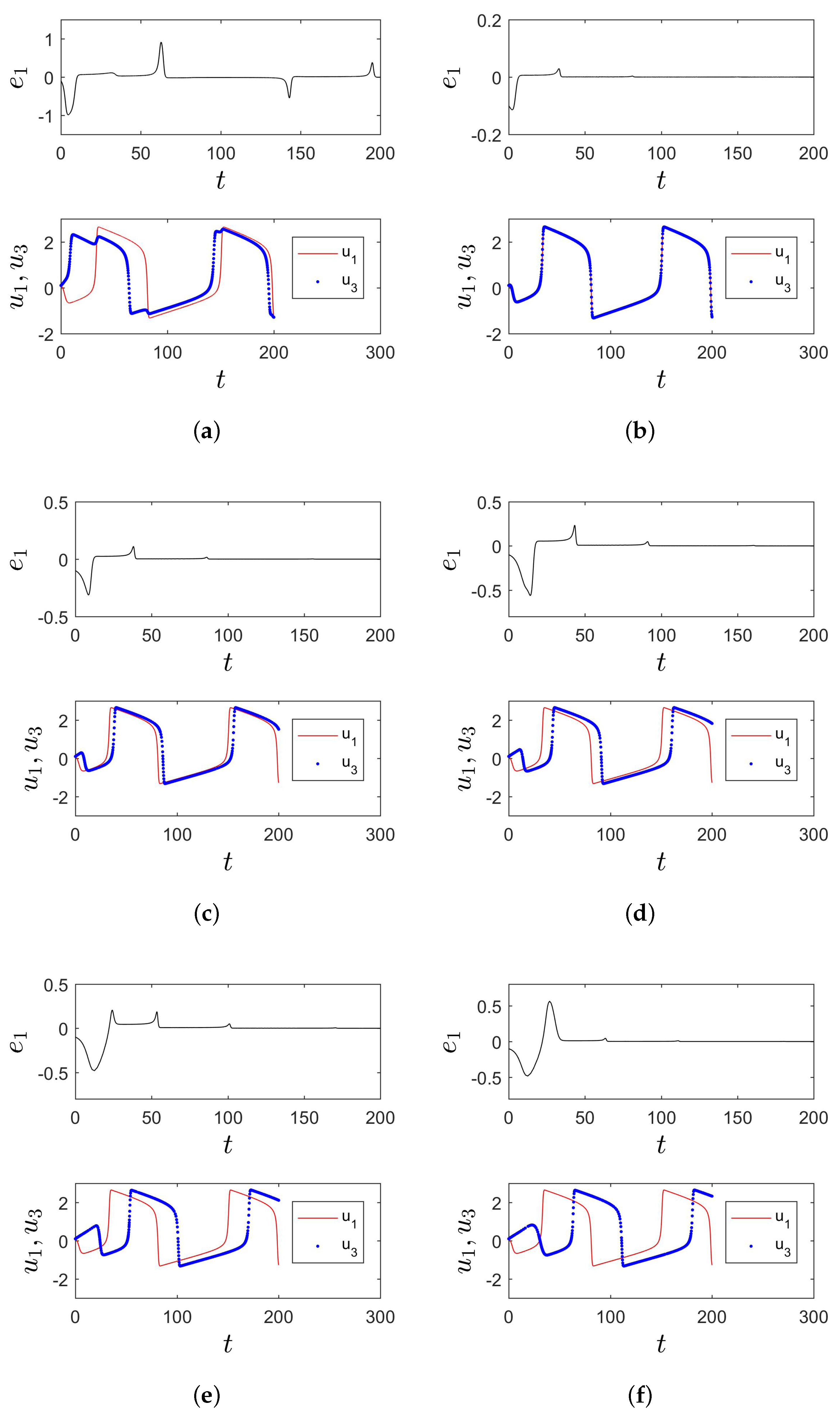
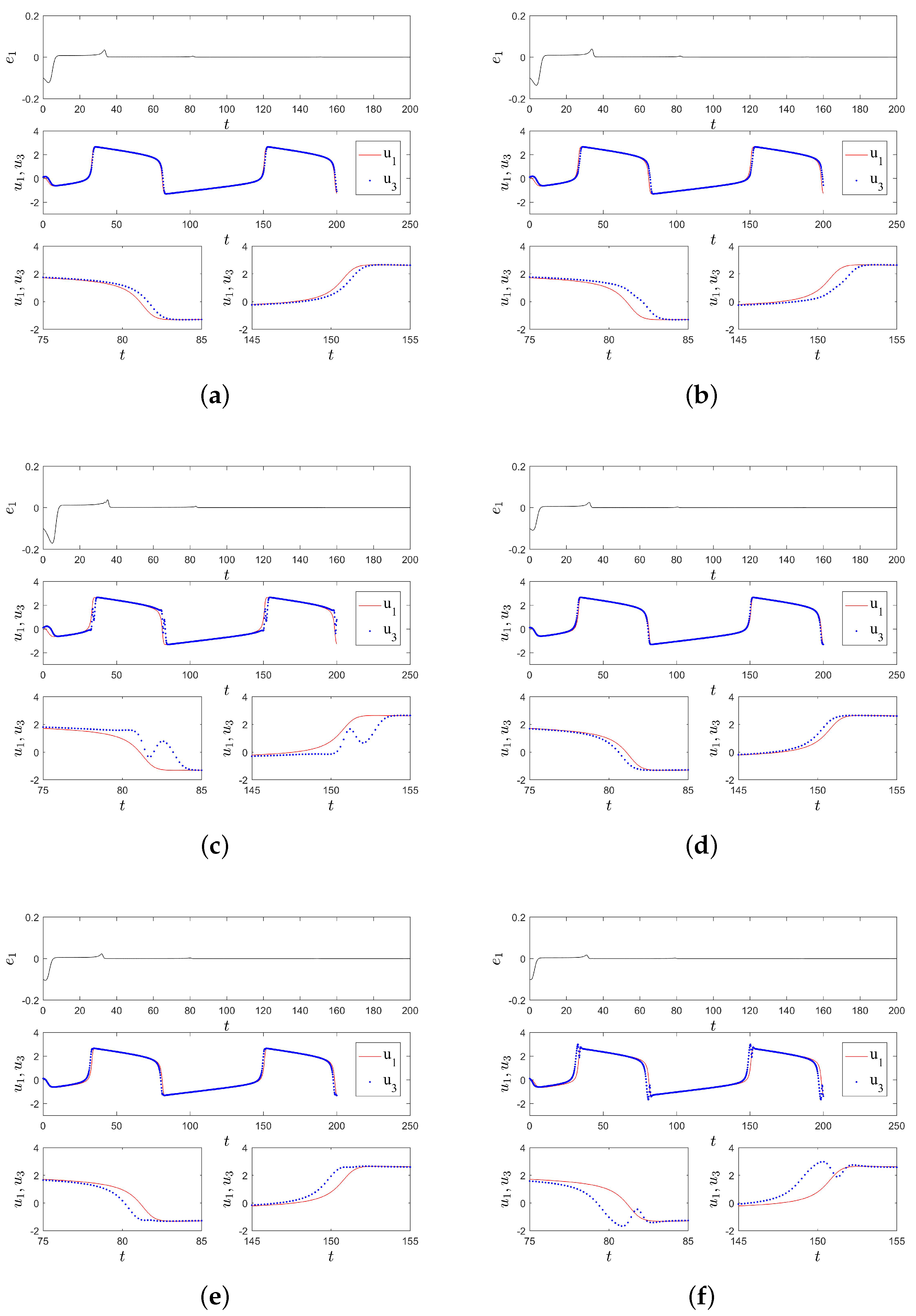
3. Analysis for GS between Two FHN Neurons and Numerical Simulations
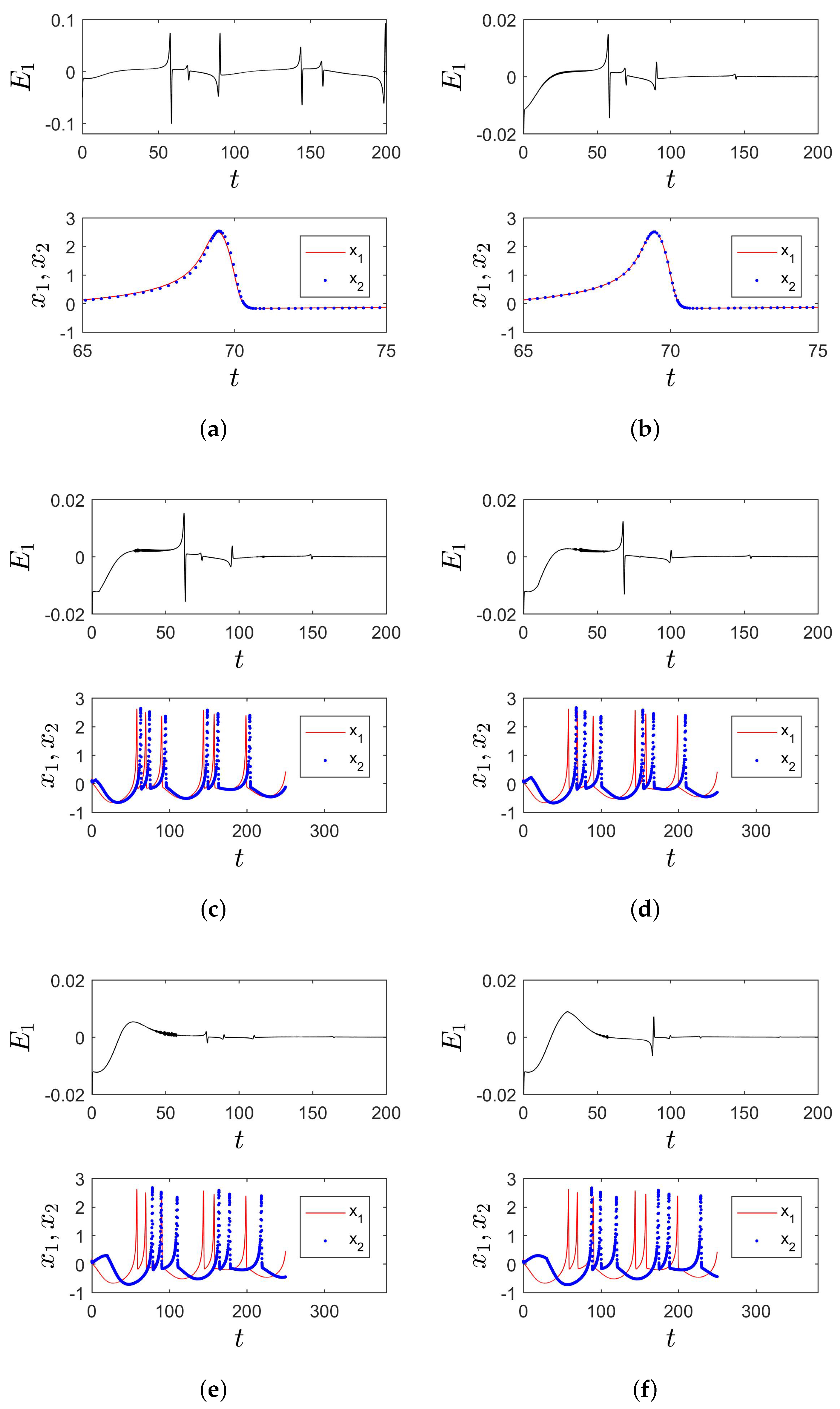
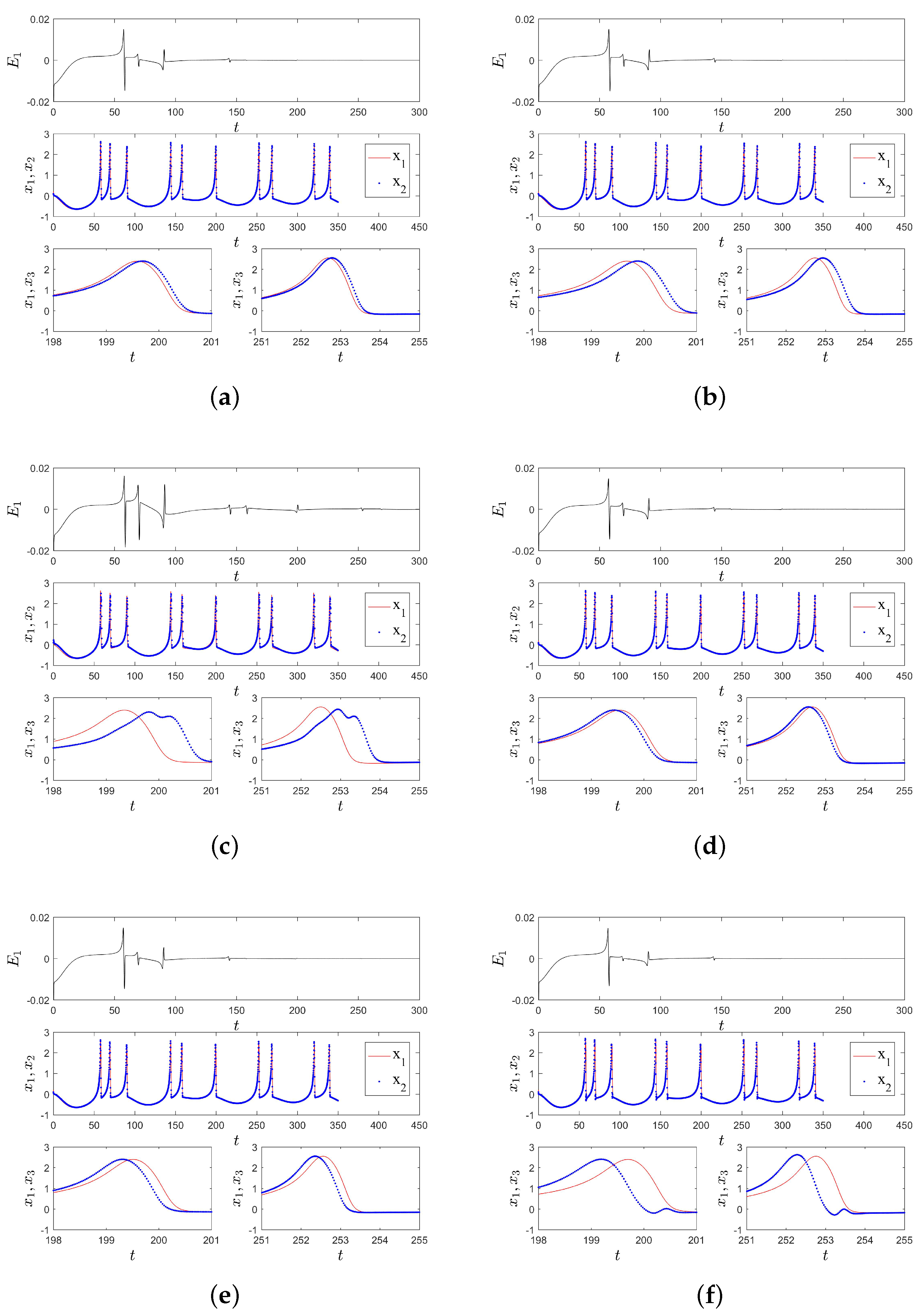
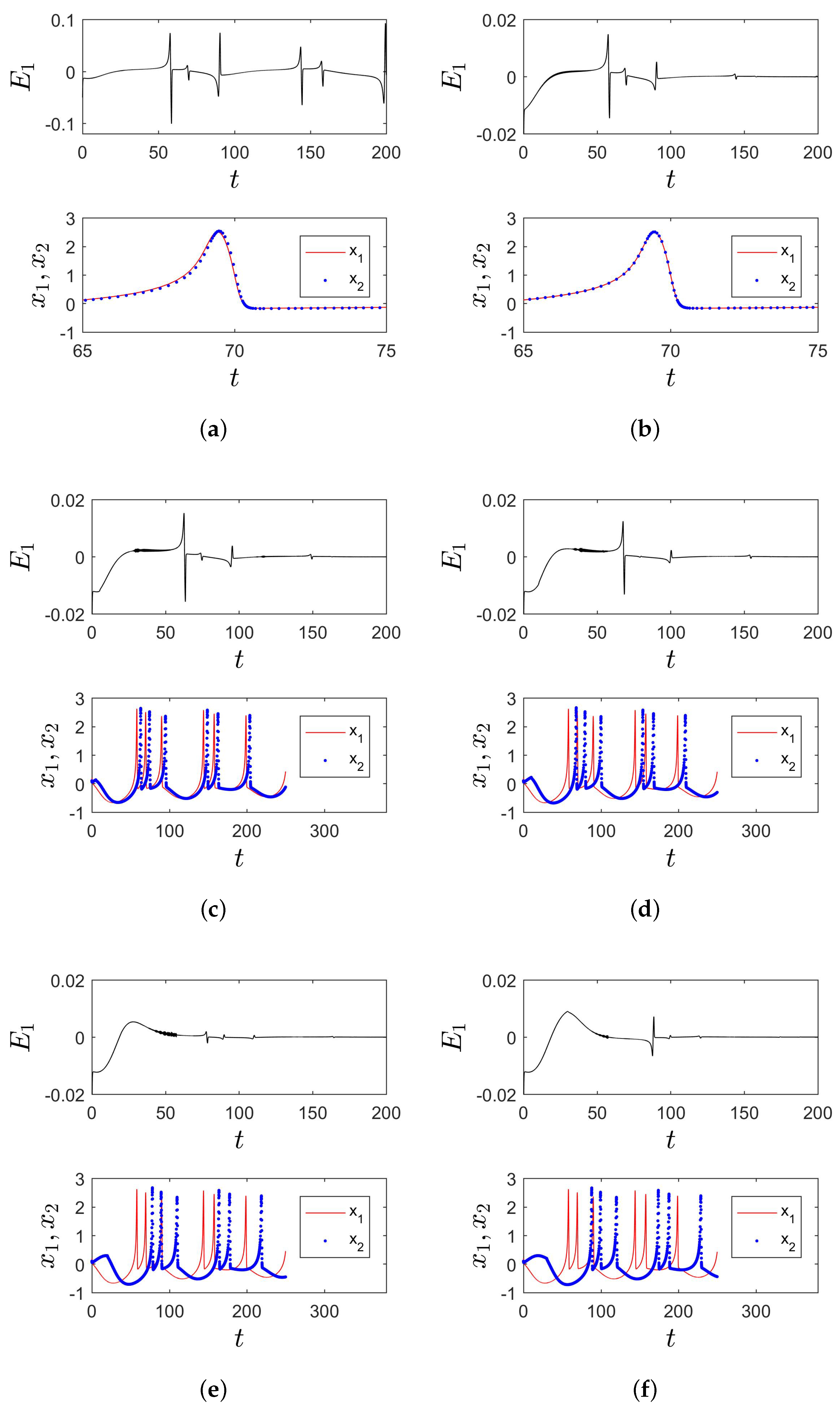
4. GS between Two HR Neurons
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arenas, A.; Díaz-Guilera, A.; Kurths, J.; Moreno, Y.; Zhou, C. Synchronization in complex networks. Phys. Rep. 2008, 18, 037111. [Google Scholar] [CrossRef] [Green Version]
- Boccaletti, S.; Kurths, J.; Osipov, G.; Valladares, D.L.; Zhou, C.S. The synchronization of chaotic systems. Phys. Rep. 2002, 366, 1–101. [Google Scholar] [CrossRef]
- Ding, X.L.; Gu, H.G.; Jia, B.; Li, Y.Y. Anticipated synchronization of electrical activity induced by inhibitory autapse in coupled Morris-Lecar neuron model. Acta Phys. Sin. 2021, 70, 218701. [Google Scholar]
- Kim, S.-Y.; Lim, W. Effect of inhibitory spike-timing dependent plasticity on fast sparsely synchronized rhythms in a small-world neuronal network. Neural Netw. 2018, 106, 50–66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, X.; Liu, J.; Zhang, F.F.; Jiang, C.M. Complex generalized synchronization of complex-variable chaotic systems. Eur. Phys. J. 2021, 230, 2035–2041. [Google Scholar] [CrossRef]
- Moskalenko, O.I.; Koronovskii, A.A.; Plotnikova, A.D. Peculiarities of generalized synchronization in unidirectionally and mutually coupled time-delayed systems. Chaos Soliton Fractals 2021, 148, 111031. [Google Scholar] [CrossRef]
- Moskalenko, O.I.; Koronovskii, A.A.; Selskii, A.O.; Evstifeev, E.V. On multistability near the boundary of generalized synchronization in unidirectionally coupled chaotic systems. Chaos 2021, 31, 083106. [Google Scholar] [CrossRef]
- Jiang, G.P.; Tang, W.K.S. A global synchronization criterion for coupled chaotic systems via unidirectional linear error feedback approach. Int. J. Bifurc. Chaos 2011, 12, 2239–2253. [Google Scholar] [CrossRef] [Green Version]
- Kocarev, L.; Parlitz, U. General approach for chaotic synchronization with applications to communication. Phys. Rev. Lett. 1995, 74, 5028–5031. [Google Scholar] [CrossRef]
- Chua, L.O.; Kocarev, L.; Eckert, K.; Itoh, M. Experimental chaos synchronization in Chua’s circuit. Int. J. Bifurc. Chaos 2011, 2, 705–708. [Google Scholar] [CrossRef]
- Abarbanel, H.D.I.; Rulkov, N.F.; Suschik, M.M. Generalized synchronization of chaos: The auxiliary system approach. Phys. Rev. E 1996, 53, 4528–4535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pecora, L.M.; Carroll, T.L. Master stability functions for synchronized coupled systems. Phys. Rev. Lett. 1998, 80, 2109–2112. [Google Scholar] [CrossRef]
- Wouapi, K.M.; Fotsin, B.H.; Louodop, F.P.; Feudjio, K.F.; Njitacke, Z.T.; Djeudjo, T.H. Various firing activities and finite-time synchronization of an improved Hindmarsh-Rose neuron model under electric field effect. Cogn. Neurodyn. 2020, 14, 375–397. [Google Scholar] [CrossRef]
- Zhou, X.; Xu, Y.; Wang, G.; Jia, Y. Ionic channel blockage in stochastic Hodgkin-Huxley neuronal model driven by multiple oscillatory signals. Cogn. Neurodyn. 2020, 14, 569–578. [Google Scholar] [CrossRef] [PubMed]
- Rehak, B.; Lynnyk, V. Synchronization of a Network Composed of Stochastic Hindmarsh-Rose Neurons. Mathematics 2021, 9, 2625. [Google Scholar] [CrossRef]
- Sharma, S.K.; Mondal, A.; Mondal, A.; Upadhyay, R.K.; Ma, J. Synchronization and Pattern Formation in a Memristive Diffusive Neuron Model. Int. J. Bifurc. Chaos 2021, 31, 2130030. [Google Scholar] [CrossRef]
- Boaretto, B.R.R.; Budzinski, R.C.; Rossi, K.L.; Manchein, C.; Prado, T.L.; Feudel, U.; Lopes, S.R. Bistability in the synchronization of identical neurons. Phys. Rev. E 2021, 104, 024204. [Google Scholar] [CrossRef]
- Wang, J.Y.; Yang, X.L.; Sun, Z.K. Suppressing bursting synchronization in a modular neuronal network with synaptic plasticity. Cogn. Neurodyn. 2018, 12, 625–636. [Google Scholar] [CrossRef]
- Sun, X.; Xue, T. Effects of time delay on burst synchronization transition of neuronal networks. Int. J. Bifurc. Chaos 2018, 28, 1850143. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Lim, W. Cluster burst synchronization in a scale-free network of inhibitory bursting neurons. Cogn. Neurodyn. 2020, 14, 69–94. [Google Scholar] [CrossRef] [Green Version]
- Semenov, D.M.; Fradkov, A.L. Adaptive synchronization in the complex heterogeneous networks of Hindmarsh-Rose neurons. Chaos Solitons Fractals 2021, 150, 111170. [Google Scholar] [CrossRef]
- Wang, Y.H.; Li, X.D.; Song, S.J. Exponential synchronization of delayed neural networks involving unmeasurable neuron states via impulsive observer and impulsive control. Neurocomputing 2021, 441, 13–24. [Google Scholar] [CrossRef]
- Hodgkin, A.; Huxley, A. A quantitative description of membrane current and its application to conduction and excitation in nerve. Bull. Math. Biol. 1990, 52, 25–71. [Google Scholar] [CrossRef]
- Fitzhugh, R. Mathematical models of threshold phenomena in the nerve membrane. Bull. Math. Biophys. 1955, 17, 257–278. [Google Scholar] [CrossRef]
- Hindmarsh, J.L.; Rose, R.M. A model of neuronal bursting using three coupled first order differential equations. Proc. R. Soc. London Ser. B Biol. Sci. 1984, 221, 87–102. [Google Scholar]
- Xu, L.; Qi, G.Y.; Ma, J. Modeling of memristor-based Hindmarsh-Rose neuron and its dynamical analyses using energy method. Appl. Math. Model. 2022, 101, 503–516. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Lim, W. Effect of spike-timing-dependent plasticity on stochastic burst synchronization in a scale-free neuronal network. Cogn. Neurodyn. 2018, 12, 315–342. [Google Scholar] [CrossRef] [PubMed]
- Nohel, J.A. Some problems in nonlinear Volterra integral equations. Bull. Am. Math. Soc. 1962, 68, 323–330. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhen, B.; Liu, R. The Study of Generalized Synchronization between Two Identical Neurons Based on the Laplace Transform Method. Appl. Sci. 2021, 11, 11774. https://doi.org/10.3390/app112411774
Zhen B, Liu R. The Study of Generalized Synchronization between Two Identical Neurons Based on the Laplace Transform Method. Applied Sciences. 2021; 11(24):11774. https://doi.org/10.3390/app112411774
Chicago/Turabian StyleZhen, Bin, and Ran Liu. 2021. "The Study of Generalized Synchronization between Two Identical Neurons Based on the Laplace Transform Method" Applied Sciences 11, no. 24: 11774. https://doi.org/10.3390/app112411774
APA StyleZhen, B., & Liu, R. (2021). The Study of Generalized Synchronization between Two Identical Neurons Based on the Laplace Transform Method. Applied Sciences, 11(24), 11774. https://doi.org/10.3390/app112411774