
Automatic Crack Classification by Exploiting Statistical Event Descriptors for Deep Learning

 ,
, 
 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Multi-Sensors Acquisition System and Experimental Setup
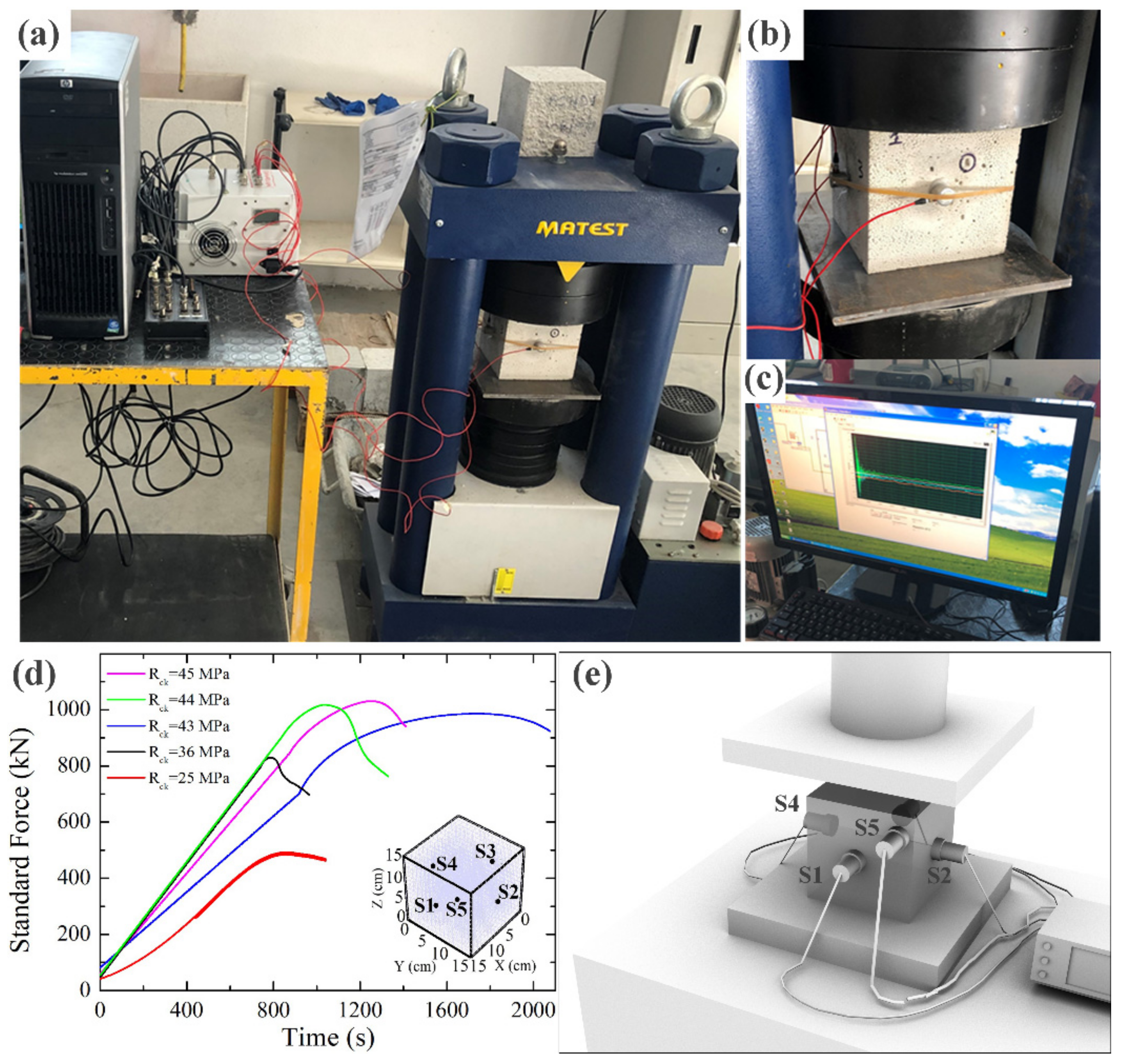
2.1. Experimental Setup
- One hydraulic press with a closed loop governing system with 5000 kN connected to the AS to control and record the load-displacement diagram;
- Piezoelectric transducers, R15α, with a peak sensitivity of 69 V/(m/s), resonant frequency 150 kHz, and directionality ±1.5 dB [50];
- Controlling hardware appliance constituted by multiple Logic Flat Amplifier Trigger generator (L-FAT) and DAta acQuisition boards (DAQ) NI-6110 with four input channels each, 12-bit resolution, and sampling frequency fAS = 5 Msample/s wherein a channel (Ch) is directly associated to each transducer.
2.2. Experimental Tests
3. Framework for the Real-Time Classification of Acoustic Emission Data
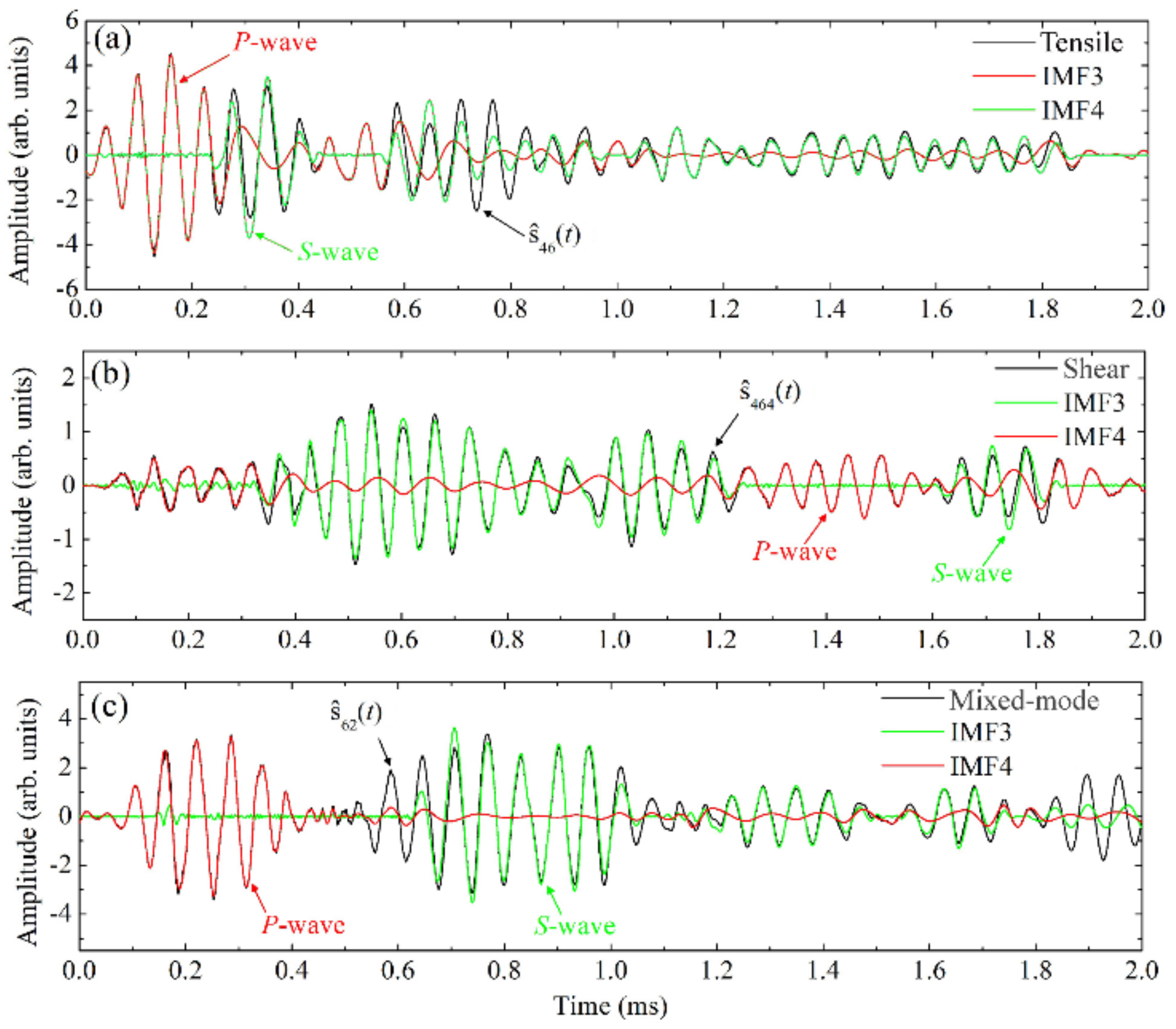
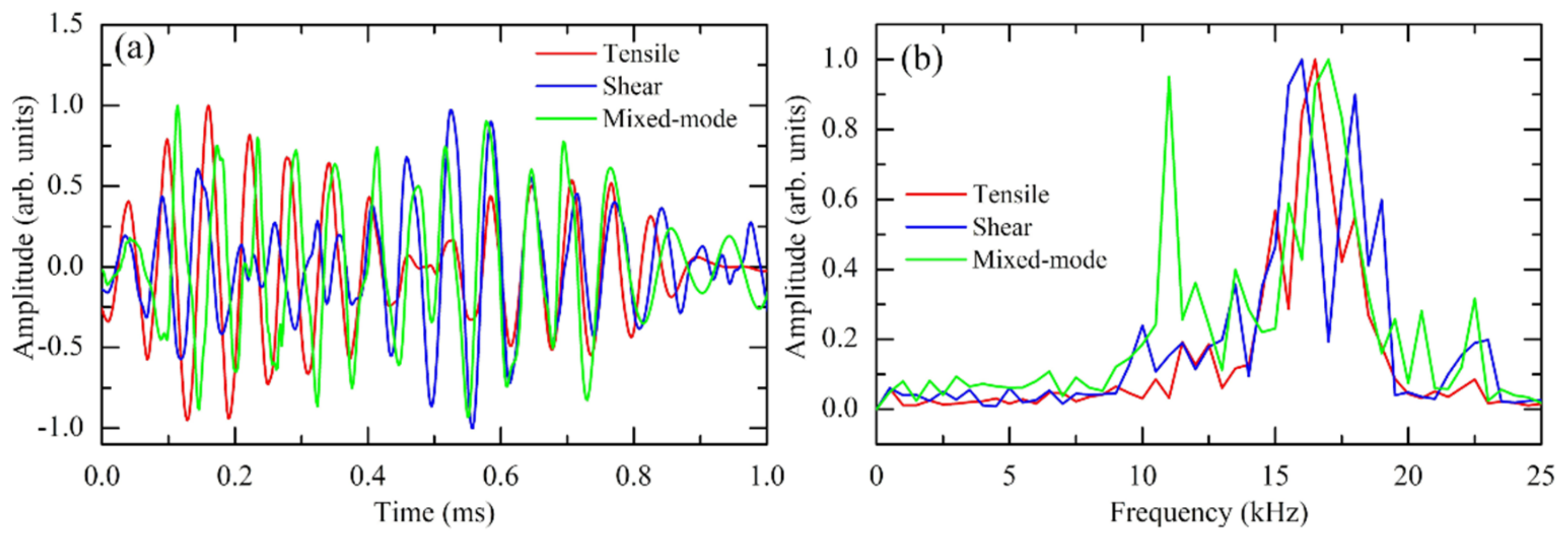
3.1. Characterization of Different Crack Events
3.2. Analysis of Acoustic Emission Events Using Feature Extraction
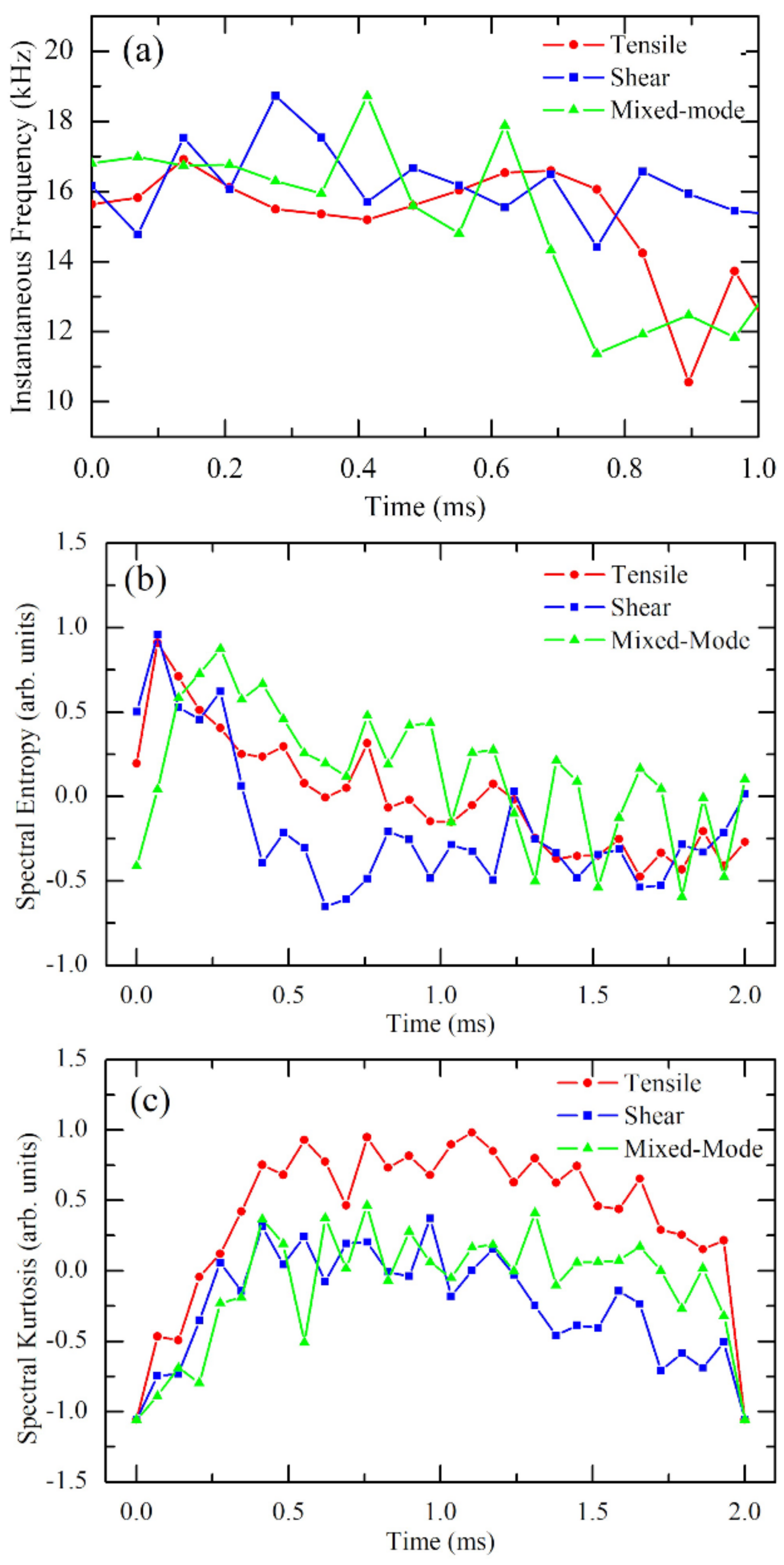
3.2.1. Instantaneous Frequency
- Compute first the analytic signal of the input, , such that , where is the Hilbert Transform of , is defined as the instantaneous power, whereas is the instantaneous phase;
- Estimate the instantaneous frequency from the following time derivative:
3.2.2. Spectral Entropy
3.2.3. Spectral Kurtosis
3.3. Deep Learning and Bidirectional Long-Short Time Memory
3.4. DL-Based Event-Type Discrimination
3.4.1. Training Model
3.4.2. Model-Parameter Settings
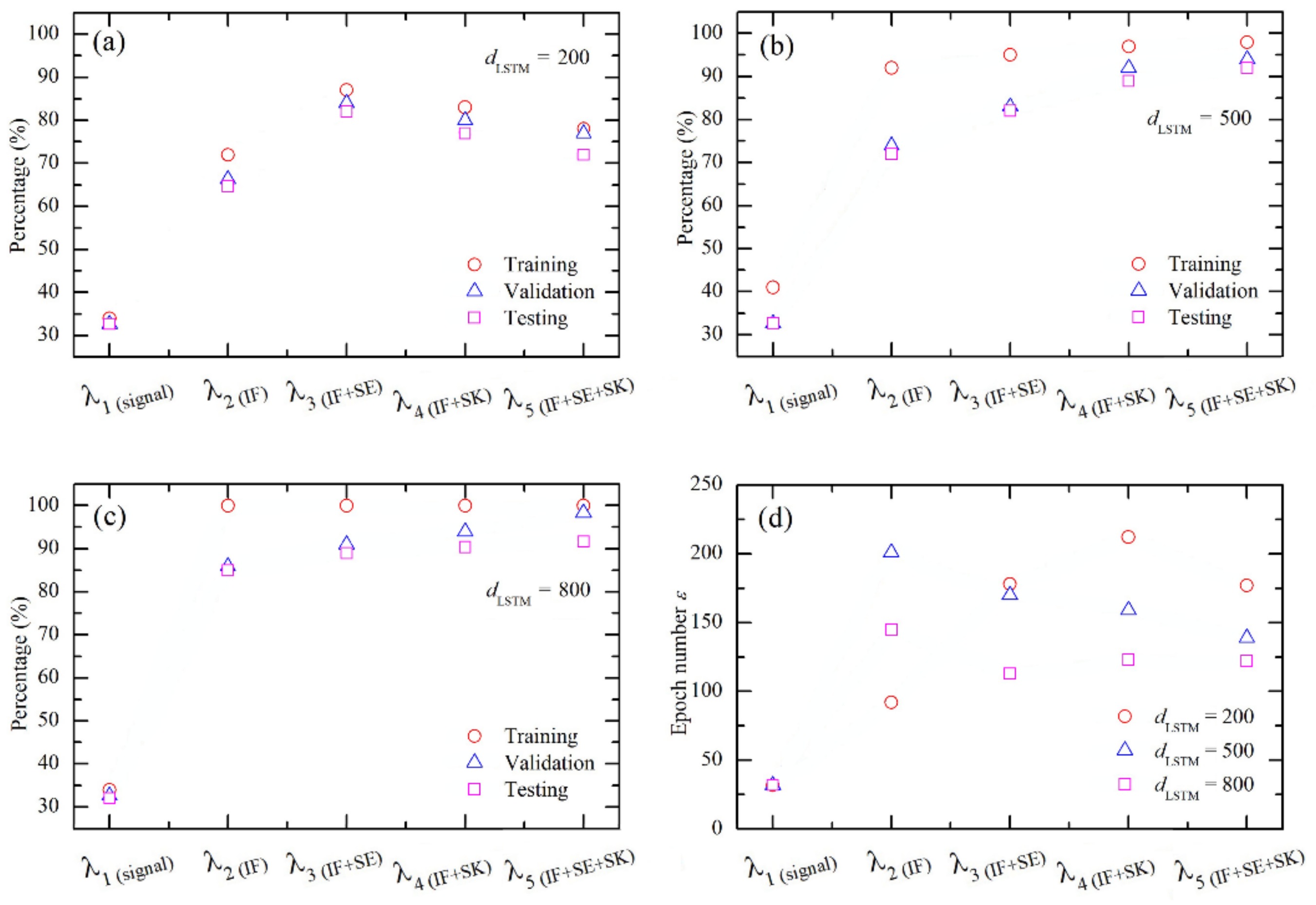
4. Results and Discussions
Performance Optimization of Model-Parameters
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Aggelis, D.G. Classification of cracking mode in concrete by acoustic emission parameters. Mech. Res. Commun. 2011, 38, 153–157. [Google Scholar] [CrossRef]
- Carpinteri, A.; Lacidogna, G.; Niccolini, G.; Puzzi, S. Critical defect size distributions in concrete structures detected by the acoustic emission technique. Meccanica 2007, 43, 349–363. [Google Scholar] [CrossRef]
- Carpinteri, A.; Lacidogna, G.; Accornero, F.; Mpalaskas, A.C.; Matikas, T.E.; Aggelis, D.G. Influence of damage in the acoustic emission parameters. Cem. Concr. Compos. 2013, 44, 9–16. [Google Scholar] [CrossRef]
- Chai, M.; Zhang, Z.; Duan, Q. A new qualitative acoustic emission parameter based on Shannon’s entropy for damage monitoring. Mech. Syst. Signal Process. 2018, 100, 617–629. [Google Scholar] [CrossRef]
- Aggelis, D.; Shiotani, T.; Papacharalampopoulos, A.; Polyzos, D. The influence of propagation path on elastic waves as measured by acoustic emission parameters. Struct. Health Monit. 2012, 11, 359–366. [Google Scholar] [CrossRef]
- Lamonaca, F.; Sciammarella, P.; Scuro, C.; Carni, D.; Olivito, R. Internet of things for structural health monitoring. In Proceedings of the 2018 Workshop on Metrology for Industry 4.0 and IoT, Brescia, Italy, 16–18 April 2018; pp. 95–100. [Google Scholar]
- Colombo, S.; Forde, M.; Main, I.; Shigeishi, M. Predicting the ultimate bending capacity of concrete beams from the “relaxation ratio” analysis of AE signals. Constr. Build. Mater. 2005, 19, 746–754. [Google Scholar] [CrossRef]
- Proverbio, E. Evaluation of deterioration in reinforced concrete structures by AE technique. Mater. Corros. 2010, 62, 161–169. [Google Scholar] [CrossRef]
- Grosse, C.U.; Ohtsu, M. (Eds.) Acoustic Emission Testing; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-3-540-69895-1. [Google Scholar]
- Carnì, D.L.; Scuro, C.; Lamonaca, F.; Olivito, R.S.; Grimaldi, D. Damage analysis of concrete structures by means of b-value technique. Int. J. Comput. 2017, 16, 82–88. [Google Scholar] [CrossRef]
- Moment Tensor Analysis of Acoustic Emission for Cracking Mechanisms in Concrete. ACI Struct. J. 1998, 95, 87–95. [CrossRef]
- Ohno, K.; Ohtsu, M. Crack classification in concrete based on acoustic emission. Constr. Build. Mater. 2010, 24, 2339–2346. [Google Scholar] [CrossRef]
- Aggelis, D.; Mpalaskas, A.; Matikas, T. Investigation of different fracture modes in cement-based materials by acoustic emission. Cem. Concr. Res. 2013, 48, 1–8. [Google Scholar] [CrossRef]
- Shahidan, S.; Pulin, R.; Bunnori, N.M.; Holford, K. Damage classification in reinforced concrete beam by acoustic emission signal analysis. Constr. Build. Mater. 2013, 45, 78–86. [Google Scholar] [CrossRef] [Green Version]
- Ohtsu, M.; Shigeishi, M.; Iwase, H.; Koyanagit, W. Determination of crack location, type and orientation in a concrete structures by acoustic emission. Mag. Concr. Res. 1991, 43, 127–134. [Google Scholar] [CrossRef]
- Shahidan, S.; Pullin, R.; Holford, K.M.; Bunnori, N.M.; Noor, N.M. Quantitative evaluation of the relationship between tensile crack and shear movement in concrete beams. Adv. Mater. Res. 2012, 626, 355–359. [Google Scholar] [CrossRef] [Green Version]
- Aggelis, D.; Mpalaskas, A.; Ntalakas, D.; Matikas, T. Effect of wave distortion on acoustic emission characterization of cementitious materials. Constr. Build. Mater. 2012, 35, 183–190. [Google Scholar] [CrossRef]
- Mpalaskas, A.; Thanasia, O.; Matikas, T.; Aggelis, D. Mechanical and fracture behavior of cement-based materials characterized by combined elastic wave approaches. Constr. Build. Mater. 2014, 50, 649–656. [Google Scholar] [CrossRef]
- Bungey, J.H.; Grantham, M.G. Testing of Concrete Structures; CRC Press: Boca Raton, FL, USA, 2006; ISBN 9780415263016. [Google Scholar]
- Morizet, N.; Godin, N.; Tang, J.; Maillet, E.; Fregonese, M.; Normand, B. Classification of acoustic emission signals using wavelets and Random Forests: Application to localized corrosion. Mech. Syst. Signal Process. 2016, 70–71, 1026–1037. [Google Scholar] [CrossRef]
- Zhang, M.; Li, J.; Xu, J.; Zheng, J.; Zhang, Q. Wood Acoustic Emission Signals Classification Based on Pseudospectrum, and Entropy. J. Phys. Conf. Ser. 2021, 2005, 012048. [Google Scholar]
- Deshpande, P.; Pandiyan, V.; Meylan, B.; Wasmer, K. Acoustic emission and machine learning based classification of wear generated using a pin-on-disc tribometer equipped with a digital holographic microscope. Wear 2021, 476, 203622. [Google Scholar] [CrossRef]
- Nasiri, S.; Khosravani, M.R. Machine learning in predicting mechanical behavior of additively manufactured parts. J. Mater. Res. Technol. 2021, 14, 1137–1153. [Google Scholar] [CrossRef]
- Kim, K.B.; Kang, H.Y.; Yoon, D.J.; Choi, M.Y. Pattern classification of acoustic emission signals during wood drying by principal component analysis and artificial neural network. Key Eng. Mater. 2005, 297–300, 1962–1967. [Google Scholar] [CrossRef]
- Li, J.; Du, G.; Jiang, C.; Jin, S. The classification of acoustic emission signals of 304 stainless steel during stress corrosion process based on K-means clustering. Anti Corros. Methods Mater. 2012, 59, 76–80. [Google Scholar] [CrossRef]
- Barat, V.; Kostenko, P.; Bardakov, V.; Terentyev, D. Acoustic signals recognition by convolutional neural network. Int. J. Appl. Eng. Res. 2017, 12, 3461–3469. [Google Scholar]
- Wu, J.-D.; Wong, Y.-H.; Luo, W.-J.; Yao, K.-C. Acoustic emission signal classification using feature analysis and deep learning neural network. Fluct. Noise Lett. 2020, 20, 2150030. [Google Scholar] [CrossRef]
- Xin, H.; Cheng, L.; Diender, R.; Veljkovic, M. Fracture acoustic emission signals identification of stay cables in bridge engineering application using deep transfer learning and wavelet analysis. Adv. Bridge Eng. 2020, 1, 6. [Google Scholar] [CrossRef]
- Pan, Y.N.; Chen, J.; Li, X.L. Spectral entropy: A complementary index for rolling element bearing performance degradation assessment. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 1223–1231. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Da Silva, W.R.L.; de Lucena, D.S. Concrete cracks detection based on deep learning image classification. In Proceedings of the 18th International Conference of experimental Mechanics (ICEM18), Brussels, Belgium, 1–5 July 2018; Volume 2, p. 489. [Google Scholar]
- Jang, K.; Kim, N.; An, Y.-K. Deep learning–based autonomous concrete crack evaluation through hybrid image scanning. Struct. Health Monit. 2018, 18, 1722–1737. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; The MIT Press: Cambridge, MA, USA, 2016; ISBN 978-0-262-03561-3. [Google Scholar]
- Wang, Z.; Yan, W.; Oates, T. Time series classification from scratch with deep neural networks: A strong baseline. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 1578–1585. [Google Scholar]
- Karim, F.; Majumdar, S.; Darabi, H.; Chen, S. LSTM Fully Convolutional Networks for Time Series Classification. IEEE Access 2018, 6, 1662–1669. [Google Scholar] [CrossRef]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural Netw. 2005, 18, 602–610. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Thireou, T.; Reczko, M. Bidirectional Long Short-Term Memory Networks for Predicting the Subcellular Localization of Eukaryotic Proteins. IEEE/ACM Trans. Comput. Biol. Bioinform. 2007, 4, 441–446. [Google Scholar] [CrossRef]
- Mousa, A.E.-D.; Schuller, B. Deep bidirectional long short-term memory recurrent neural networks for grapheme-to-phoneme conversion utilizing complex many-to-many alignments. In Proceedings of the Annual Conference of the International Speech Communication Association, INTERSPEECH, San Francisco, CA, USA, 8–12 September 2016; pp. 2836–2840. [Google Scholar]
- Yokoyama, S.; Matsumoto, T. Development of an automatic detector of cracks in concrete using machine learning. Procedia Eng. 2017, 171, 1250–1255. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhao, H.; Wang, F. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2017, 95, 187–204. [Google Scholar] [CrossRef]
- Gan, M.; Wang, C.; Zhu, C. Construction of hierarchical diagnosis network based on deep learning and its application in the fault pattern recognition of rolling element bearings. Mech. Syst. Signal Process. 2016, 72–73, 92–104. [Google Scholar] [CrossRef]
- Ohtsu, M.; Shiotani, T.; Shigeishi, M.; Kamada, T.; Yuyama, S.; Watanabe, T.; Suzuki, T.; van Mier, J.G.M.; Vogel, T.; Grosse, C.; et al. Recommendation of RILEM TC 212-ACD: Acoustic Emission and Related NDE Techniques for Crack Detection and Damage Evaluation in Concrete. Mater. Struct. 2010, 43, 1177–1181. [Google Scholar] [CrossRef] [Green Version]
- Lamonaca, F.; Carrozzini, A. Sensors & Transducers of Acoustic Emissions in Civil Engineering Structures by Using Time Frequency. Representation 2010, 8, 42–53. [Google Scholar]
- Siracusano, G.; Lamonaca, F.; Tomasello, R.; Garescì, F.; La Corte, A.; Carnì, D.L.; Carpentieri, M.; Grimaldi, D.; Finocchio, G. A framework for the damage evaluation of acoustic emission signals through Hilbert–Huang transform. Mech. Syst. Signal Process. 2016, 75, 109–122. [Google Scholar] [CrossRef]
- Ohtsu, M.; Tomoda, Y. Phenomenological Model of Corrosion Process in Reinforced Concrete Identified by Acoustic Emission. ACI Mater. J. 2008, 105, 194–199. [Google Scholar] [CrossRef]
- Mindess, S. Acoustic emission methods. In Handbook on Nondestructive Testing of Concrete Second Edition; CRC Press: Boca Raton, FL, USA, 2003; pp. 348–364. [Google Scholar]
- Carpinteri, A.; Lacidogna, G.; Manuello, A. Localization accuracy of microcracks in damaged concrete structures. In Acoustic Emission and Critical Phenomena; CRC Press: Boca Raton, FL, USA, 2008; pp. 103–124. [Google Scholar]
- Kaphle, M.; Tan, A. Study of Acoustic Emission Data Analysis Tools for Structural Health Monitoring Applications. Acoust. Emiss. 2010, 29, 243–250. [Google Scholar]
- iTech Standards. UNI EN UNI EN 12390-3. Testing Hardened Concrete Part 3: Compressive Strength of Test Specimens. 2009. Available online: https://www.en-standard.eu/din-en-12390-3-testing-hardened-concrete-part-3-compressive-strength-of-test-specimens/ (accessed on 14 December 2021).
- Wriggers, P.; Moftah, S. Mesoscale models for concrete: Homogenisation and damage behaviour. Finite Elem. Anal. Des. 2006, 42, 623–636. [Google Scholar] [CrossRef]
- iTech Standards. UNI EN UNI EN 13477-2. Non-Destructive Testing-Acoustic Emission-Equipment Characteristic-Part 2: Verification of Operating Characteristic. 2011. Available online: https://www.en-standard.eu/une-en-13477-2-2011-non-destructive-testing-acoustic-emission-equipment-characterisation-part-2-verification-of-operating-characteristic/ (accessed on 14 December 2021).
- Carpinteri, A.; Corrado, M.; Lacidogna, G. Heterogeneous materials in compression: Correlations between absorbed, released and acoustic emission energies. Eng. Fail. Anal. 2013, 33, 236–250. [Google Scholar] [CrossRef]
- Garesci’, F. Static and dynamic analysis of bonded sandwich plates. Int. J. Adhes. Adhes. 2012, 33, 7–14. [Google Scholar] [CrossRef]
- Shen, G.; Wu, Z.; Zhang, J. Advances in Acoustic Emission Technology: Proceedings of the World Conference on Acoustic Emission–2013; Springer: Berlin/Heidelberg, Germany, 2015; p. 158. [Google Scholar]
- Munoz, D.; Lara, F.B.; Vargas, C.; Enriquez-Caldera, R. Position Location Techniques and Applications; Elsevier: Amsterdam, The Netherlands, 2009; ISBN 9780123743534. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Takahashi, H.; Oohara, K.-I.; Kaneyama, M.; Hiranuma, Y.; Camp, J.B. On Investigating Emd Parameters To Search for Gravitational Waves. Adv. Adapt. Data Anal. 2013, 05, 1350010. [Google Scholar] [CrossRef] [Green Version]
- Köppel, S.; Grosse, C. Advanced acoustic emission techniques for failure analysis in concrete. In Proceedings of the World Conference on Non-Destructive Testing (WCNDT), Rome, Italy, 15–21 October 2000. [Google Scholar]
- Aggelis, D.; Matikas, T. Effect of plate wave dispersion on the acoustic emission parameters in metals. Comput. Struct. 2012, 98–99, 17–22. [Google Scholar] [CrossRef]
- Ono, K. Structural integrity evaluation by means of acoustic emission. In Acoustic Emission and Critical Phenomena; Jenny Stanford Publishing: Dubai, United Arab Emirates, 2008; Volume 25, pp. 13–27. [Google Scholar]
- Soulioti, D.; Barkoula, N.; Paipetis, A.; Matikas, T.; Shiotani, T.; Aggelis, D. Acoustic emission behavior of steel fibre reinforced concrete under bending. Constr. Build. Mater. 2009, 23, 3532–3536. [Google Scholar] [CrossRef] [Green Version]
- Carmona, J.R.; Ruiz, G.; del Viso, J.R. Mixed-mode crack propagation through reinforced concrete. Eng. Fract. Mech. 2007, 74, 2788–2809. [Google Scholar] [CrossRef]
- Behnia, A.; Chai, H.; Yorikawa, M.; Momoki, S.; Terazawa, M.; Shiotani, T. Integrated non-destructive assessment of concrete structures under flexure by acoustic emission and travel time tomography. Constr. Build. Mater. 2014, 67, 202–215. [Google Scholar] [CrossRef]
- Bocca, P.; Carpinteri, A.; Valente, S. Mixed mode fracture of concrete. Int. J. Solids Struct. 1991, 27, 1139–1153. [Google Scholar] [CrossRef]
- Ohtsu, M.; Kaminaga, Y.; Munwam, M.C. Experimental and numerical crack analysis of mixed-mode failure in concrete by acoustic emission and boundary element method. Constr. Build. Mater. 1999, 13, 57–64. [Google Scholar] [CrossRef]
- Qian, J.; Fatemi, A. Mixed mode fatigue crack growth: A literature survey. Eng. Fract. Mech. 1996, 55, 969–990. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y.; Axel, L.; Huang, J. Real time dynamic mri by exploiting spatial and temporal sparsity. Magn. Reson. Imaging 2015, 34, 473–482. [Google Scholar] [CrossRef]
- Buj-Corral, I.; Álvarez-Flórez, J.; Domínguez-Fernández, A. Acoustic emission analysis for the detection of appropriate cutting operations in honing processes. Mech. Syst. Signal Process. 2018, 99, 873–885. [Google Scholar] [CrossRef]
- Lin, L.; Chu, F. Feature extraction of AE characteristics in offshore structure model using Hilbert–Huang transform. Measurement 2011, 44, 46–54. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Wang, K.; Shen, Y.; Hu, H. Rail crack detection based on the adaptive noise cancellation method of EMD at high speed. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Boashash, B. Estimating and interpreting the instantaneous frequency of a signal. I. Fundamentals. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Boashash, B. Estimating and interpreting the instantaneous frequency of a signal. II. Algorithms and applications. In Proceedings of the Proc. IEEE 1992, 80, 540–558. [Google Scholar]
- Vakkuri, A.; Yli-Hankala, A.; Talja, P.; Mustola, S.; Tolvanen-Laakso, H.; Sampson, T.; Viertio-Oja, H. Time-frequency balanced spectral entropy as a measure of anesthetic drug effect in central nervous system during sevoflurane, propofol, and thiopental anesthesia. Acta Anaesthesiol. Scand. 2004, 48, 145–153. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Boashash, B. Time-frequency concepts. In In Time Frequency Analysis: A Comprehensive Reference; 2003; ISBN 9780080443355. [Google Scholar]
- Boashash, B. Time-frequency signal analysis and processing. Elsevier: Amsterdam, The Netherlands, 2016; ISBN 9780123984999. [Google Scholar]
- Sharma, V.; Parey, A. A Review of Gear Fault Diagnosis Using Various Condition Indicators. Procedia Eng. 2016, 144, 253–263. [Google Scholar] [CrossRef] [Green Version]
- Uddin, F.A.K.M.; Shigeishi, M.; Ohtsu, M. Fracture Mechanics of Corrosion Cracking in Concrete by Acoustic Emission. Meccanica 2006, 41, 425–442. [Google Scholar] [CrossRef]
- Xiong, X.; Yang, S.; Gan, C. A new procedure for extracting fault feature of multi-frequency signal from rotating machinery. Mech. Syst. Signal Process. 2012, 32, 306–319. [Google Scholar] [CrossRef]
- Maddela, V.K.R.; Venkata, K.; Rao, V. Spectral Kurtosis Theory: A Review through Simulations Spectral Kurtosis Theory: A Review through Simulations. Glob. J. Res. Eng. F Electr. Electron. Eng. 2015, 15, 49–61. [Google Scholar]
- Carpinteri, A.; Lacidogna, G.; Corrado, M.; Di Battista, E. Cracking and crackling in concrete-like materials: A dynamic energy balance. Eng. Fract. Mech. 2016, 155, 130–144. [Google Scholar] [CrossRef]
- Lacidogna, G.; Piana, G.; Carpinteri, A. Acoustic Emission and Modal Frequency Variation in Concrete Specimens under Four-Point Bending. Appl. Sci. 2017, 7, 339. [Google Scholar] [CrossRef]
- Landis, E.N.; Shah, S.P. Frequency-Dependent Stress Wave Attenuation in Cement-Based Materials. J. Eng. Mech. 1995, 121, 737–743. [Google Scholar] [CrossRef]
- Fischer, T.; Krauss, C. Deep learning with long short-term memory networks for financial market predictions. Eur. J. Oper. Res. 2018, 270, 654–669. [Google Scholar] [CrossRef] [Green Version]
- Makris, D.; Kaliakatsos-Papakostas, M.; Karydis, I.; Kermanidis, K.L. Combining LSTM and feed forward neural networks for conditional rhythm composition. In Communications in Computer and Information Science; Springer: Singapore, 2017; pp. 570–582. [Google Scholar]
- Ohtsu, M. Simplified moment tensor analysis and unified decomposition of acoustic emission source: Application to in situ hydrofracturing test. J. Geophys. Res. Space Phys. 1991, 96, 6211–6221. [Google Scholar] [CrossRef]
- Aggelis, D.; Matikas, T.; Shiotani, T. Advanced acoustic techniques for health monitoring of concrete structures. In Song’s Handb. Concr. Durab; Kim, S.H., Ann, K.Y., Eds.; Middleton Publishing Inc.: Haslemere, UK, 2010; pp. 331–378. ISBN 321-2010-000013. [Google Scholar]
- Hampton, J.; Gutierrez, M.; Matzar, L.; Hu, D.; Frash, L. Acoustic emission characterization of microcracking in laboratory-scale hydraulic fracturing tests. J. Rock Mech. Geotech. Eng. 2018, 10, 805–817. [Google Scholar] [CrossRef]
- Di Battista, E.; Lacidogna, G.; Invernizzi, S.; Accornero, F.; Borla, O. Acoustic emission and fracture energy dissipation in notched concrete beams subjected to three-point bending tests. In Proceedings of the XXIII Congresso-Associazione Italiana di Meccanica Teorica e Applicata (AIMETA), Turin, Italy, 17–20 September 2013. [Google Scholar]
- Ohtsu, M. Acoustic emission and related non-destructive evaluation techniques in the Ffracture mechanics of concrete; Elsevier: Amsterdam, The Netherlands, 2015; ISBN 9781782423270. [Google Scholar]
- Behnia, A.; Chai, H.K.; Shiotani, T. Advanced structural health monitoring of concrete structures with the aid of acoustic emission. Constr. Build. Mater. 2014, 65, 282–302. [Google Scholar] [CrossRef]
- Zaki, A.; Chai, H.K.; Aggelis, D.G.; Alver, N. Non-destructive evaluation for corrosion monitoring in concrete: A review and capability of acoustic emission technique. Sensors 2015, 15, 19069–19101. [Google Scholar] [CrossRef] [PubMed]
- Akm, F.; Ohtsu, M. Micromechanics of corrosion cracking in reinforced concrete by Ae. In Earthquakes and Acoustic Emission; CRC Press: Boca Raton, FL, USA, 2007; pp. 118–128. [Google Scholar]
- Sagar, R.V.; Srivastava, J.; Singh, R. A probabilistic analysis of acoustic emission events and associated energy release during formation of shear and tensile cracks in cementitious materials under uniaxial compression. J. Build. Eng. 2018, 20, 647–662. [Google Scholar] [CrossRef]
- Nair, V.; Hinton, G. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning, Haifa Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Heaton, J.; Goodfellow, I.; Bengio, Y.; Courville, A. Deep learning. Genet. Program. Evolvable Mach. 2018, 19, 305–307. [Google Scholar] [CrossRef] [Green Version]
- Bishop, C.M. Pattern recognition and machine learning. In Information Science and Statistics; Springer: New York, NY, USA, 2006; ISBN 9780387310732. [Google Scholar]
- Carlin, B.P.; Louis, T.A. Bayesian Methods for Data Analysis; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Distributed Systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Schlüter, J.; Grill, T. Exploring data augmentation for improved singing voice detection with neural networks. In Proceedings of the Int. Soc. Music Inf. Retr. Conf., Málaga, Spain, 26–30 October 2015; pp. 121–126. [Google Scholar]
- Uhlich, S.; Porcu, M.; Giron, F.; Enenkl, M.; Kemp, T.; Takahashi, N.; Mitsufuji, Y. Improving music source separation based on deep neural networks through data augmentation and network blending. In Proceedings of the IEEE International Conference on Acoustics Speech, and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 261–265. [Google Scholar]
- Abbassi, F.; Ahmad, F. Behavior analysis of concrete with recycled tire rubber as aggregate using 3D-digital image correlation. J. Clean. Prod. 2020, 274, 123074. [Google Scholar] [CrossRef]
- Raimondo, E.; Giordano, A.; Grimaldi, A.; Puliafito, V.; Carpentieri, M.; Zeng, Z.; Tomasello, R.; Finocchio, G. Reliability of Neural Networks Based on Spintronic Neurons. IEEE Magn. Lett. 2021, 12, 1–5. [Google Scholar] [CrossRef]
- Tomasello, R.; Giordano, A.; Garescì, F.; Siracusano, G.; De Caro, S.; Ciminelli, C.; Carpentieri, M.; Finocchio, G. Role of Magnetic Skyrmions for the Solution of the Shortest Path Problem. J. Magn. Magn. Mater. 2021. [Google Scholar] [CrossRef]
- Scuro, C.; Sciammarella, P.F.; Lamonaca, F.; Olivito, R.S.; Carni, D.L. IoT for structural health monitoring. IEEE Instrum. Meas. Mag. 2018, 21, 4–14. [Google Scholar] [CrossRef]
- Opoku, D.-G.J.; Perera, S.; Osei-Kyei, R.; Rashidi, M. Digital twin application in the construction industry: A literature review. J. Build. Eng. 2021, 40, 102726. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Acronym | Domain | Expression | Description | Ref. |
|---|---|---|---|---|---|
| Instantaneous Frequency | IF | Time | Derivative of the phase of the analytic signal of the input | [73,74] | |
| Spectral Entropy | SE | Freq. | Measure of the spectral power distribution | [30,75] | |
| Spectral Kurtosis | SK | Freq. | Describes the resemblance or difference of the shape of the spectral distribution of a signal if compared to the shape of a Gaussian bell curve | [31,76] |
| Available Inputs | Signal | IF | SE | SK | Size of Input DATASET Γq |
|---|---|---|---|---|---|
| λ1 | yes | no | no | no | Q × 1 × NED |
| λ2 | no | yes | no | no | Q × 1 × NED |
| λ3 | no | yes | yes | no | Q × 2 × NED |
| λ4 | no | yes | no | yes | Q × 2 × NED |
| λ5 | no | yes | yes | yes | Q × 3 × NED |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siracusano, G.; Garescì, F.; Finocchio, G.; Tomasello, R.; Lamonaca, F.; Scuro, C.; Carpentieri, M.; Chiappini, M.; La Corte, A. Automatic Crack Classification by Exploiting Statistical Event Descriptors for Deep Learning. Appl. Sci. 2021, 11, 12059. https://doi.org/10.3390/app112412059
Siracusano G, Garescì F, Finocchio G, Tomasello R, Lamonaca F, Scuro C, Carpentieri M, Chiappini M, La Corte A. Automatic Crack Classification by Exploiting Statistical Event Descriptors for Deep Learning. Applied Sciences. 2021; 11(24):12059. https://doi.org/10.3390/app112412059
Chicago/Turabian StyleSiracusano, Giulio, Francesca Garescì, Giovanni Finocchio, Riccardo Tomasello, Francesco Lamonaca, Carmelo Scuro, Mario Carpentieri, Massimo Chiappini, and Aurelio La Corte. 2021. "Automatic Crack Classification by Exploiting Statistical Event Descriptors for Deep Learning" Applied Sciences 11, no. 24: 12059. https://doi.org/10.3390/app112412059
APA StyleSiracusano, G., Garescì, F., Finocchio, G., Tomasello, R., Lamonaca, F., Scuro, C., Carpentieri, M., Chiappini, M., & La Corte, A. (2021). Automatic Crack Classification by Exploiting Statistical Event Descriptors for Deep Learning. Applied Sciences, 11(24), 12059. https://doi.org/10.3390/app112412059