
Real-Time Terrain-Following of an Autonomous Quadrotor by Multi-Sensor Fusion and Control

 ,
, 
Abstract
:1. Introduction
2. Quadrotor System Models
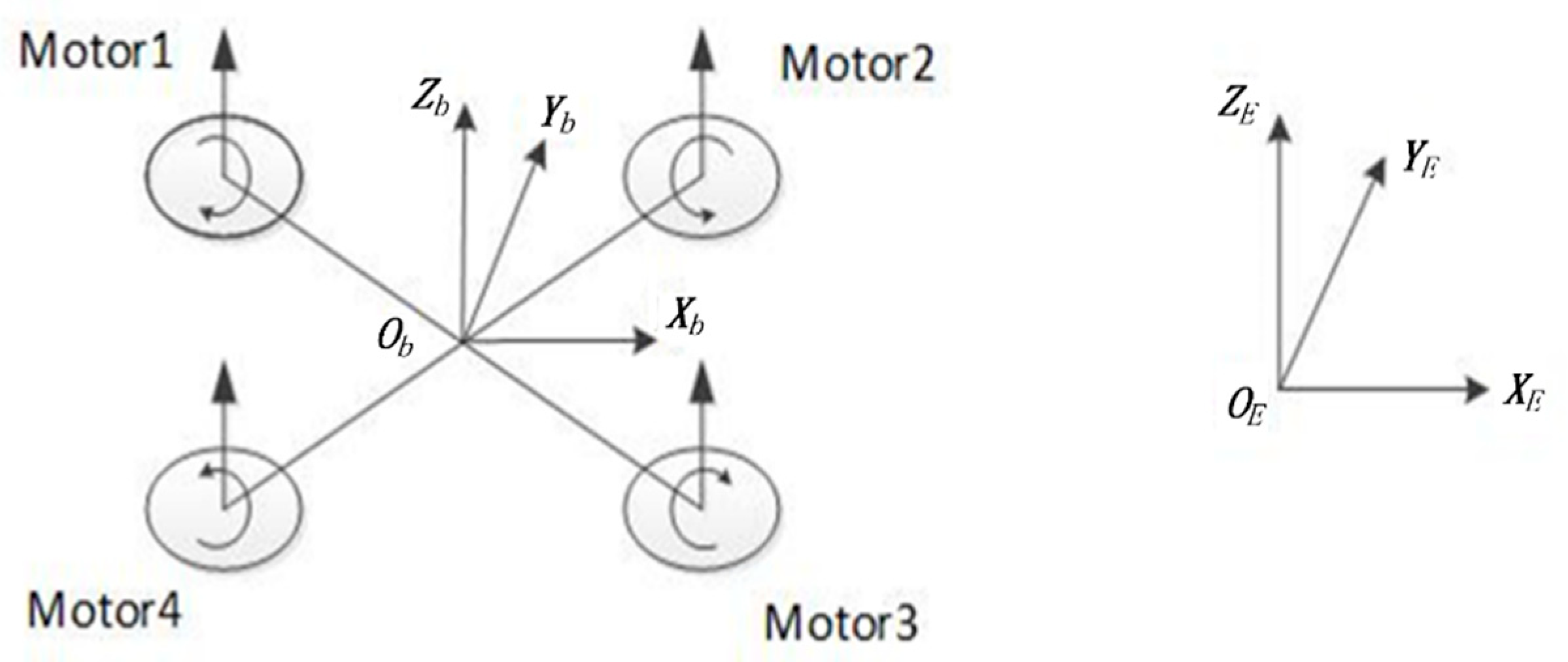
2.1. Quadrotor Dynamic Models
- The geographic coordinate system () is used to study the motion state of aircraft relative to the earth and the space position coordinates in which point to East-North-Up, respectively.
- The airframe coordinate system () is used to study the rotational motion of aircraft relative to the center of gravity in which point to Right-Front-Up, respectively.
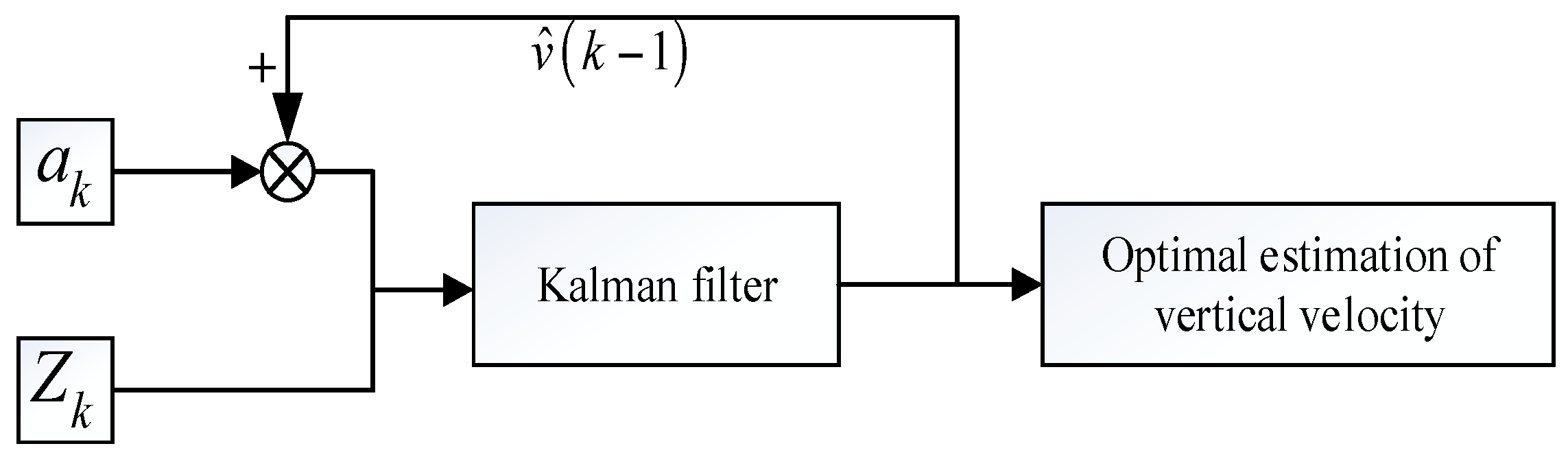
2.2. Quadrotor State Estimations
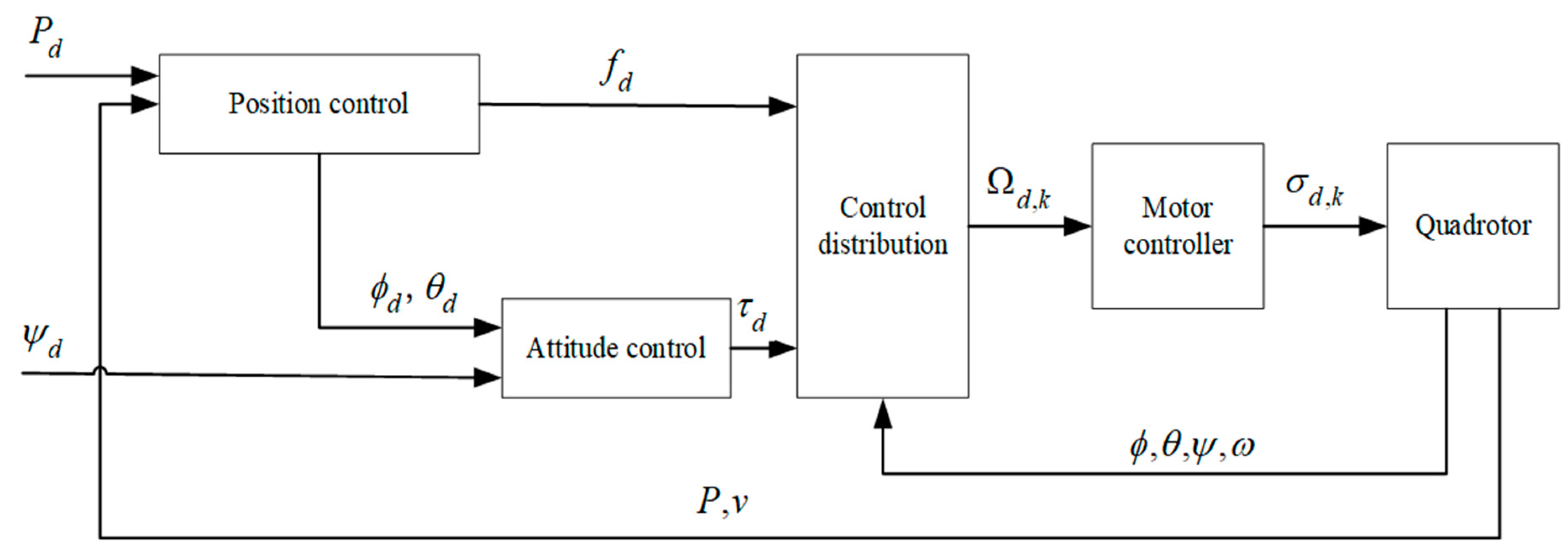
3. Quadrotor Integrated Control
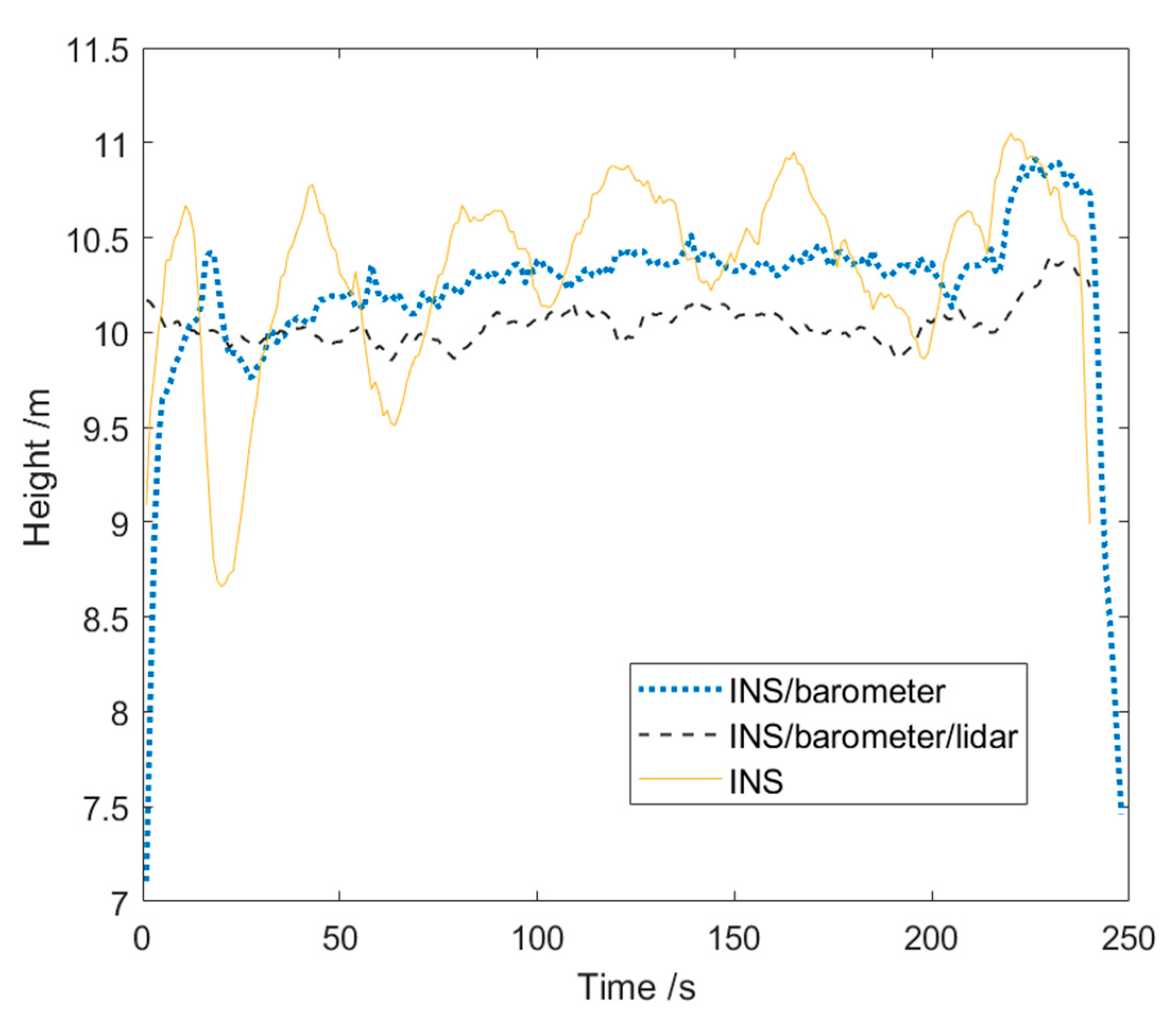
3.1. Height and Vertical Velocity Estimations
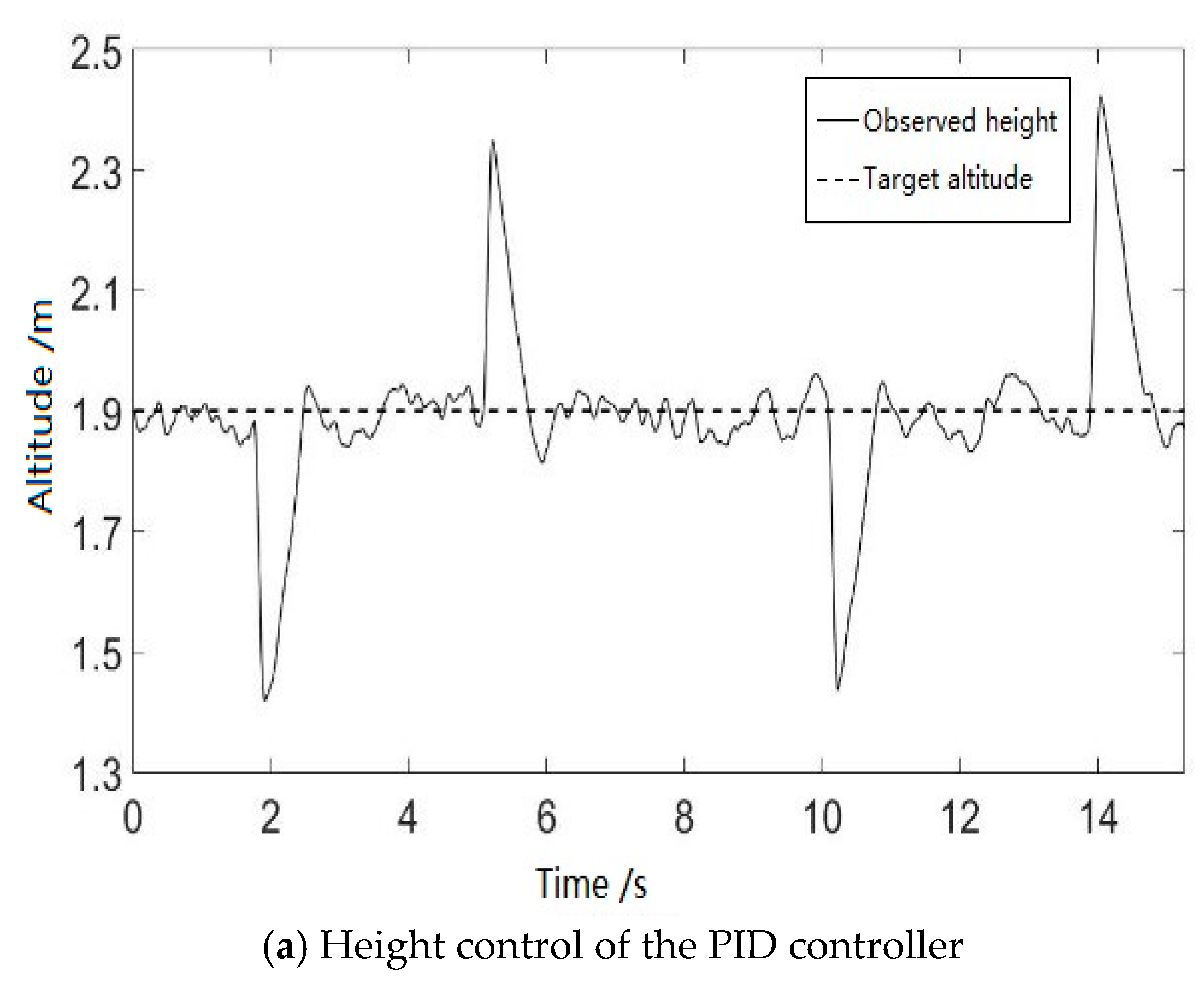
3.2. Height and Vertical Velocity Based on a PID Controller
- Continuous formwhere is the output of the control system, , and is the proportional, integral and the differential gain. And is the error between the set point and the feedback value, represents the current time, and is an integral variable of which the value is from 0 to the current time.
- Discrete form
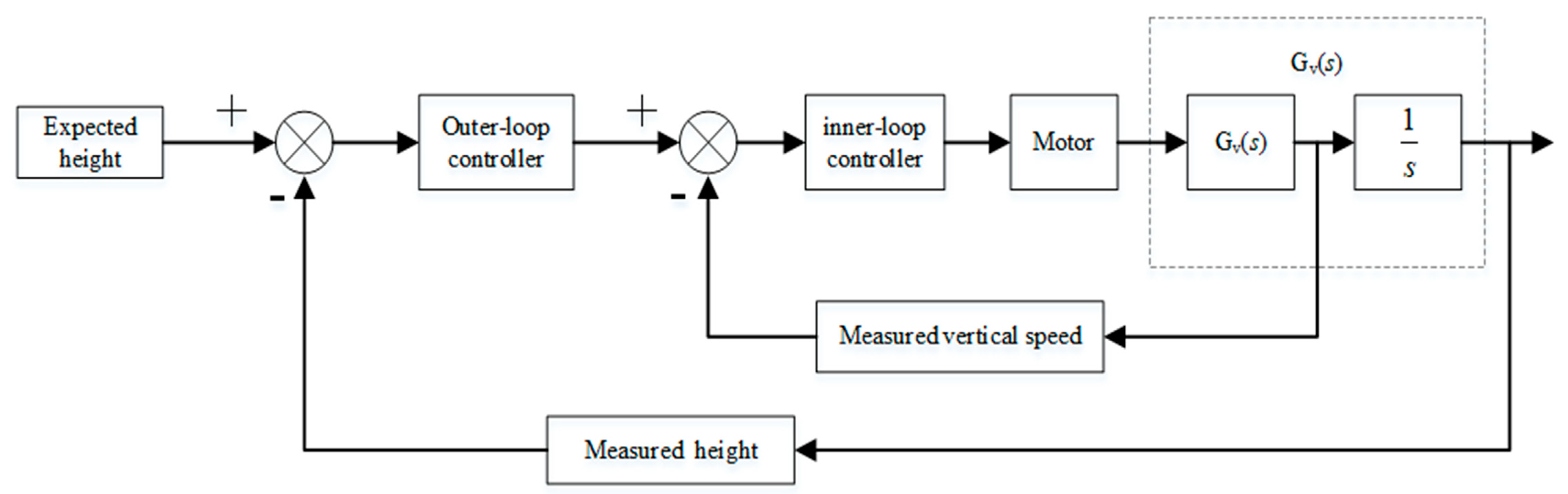
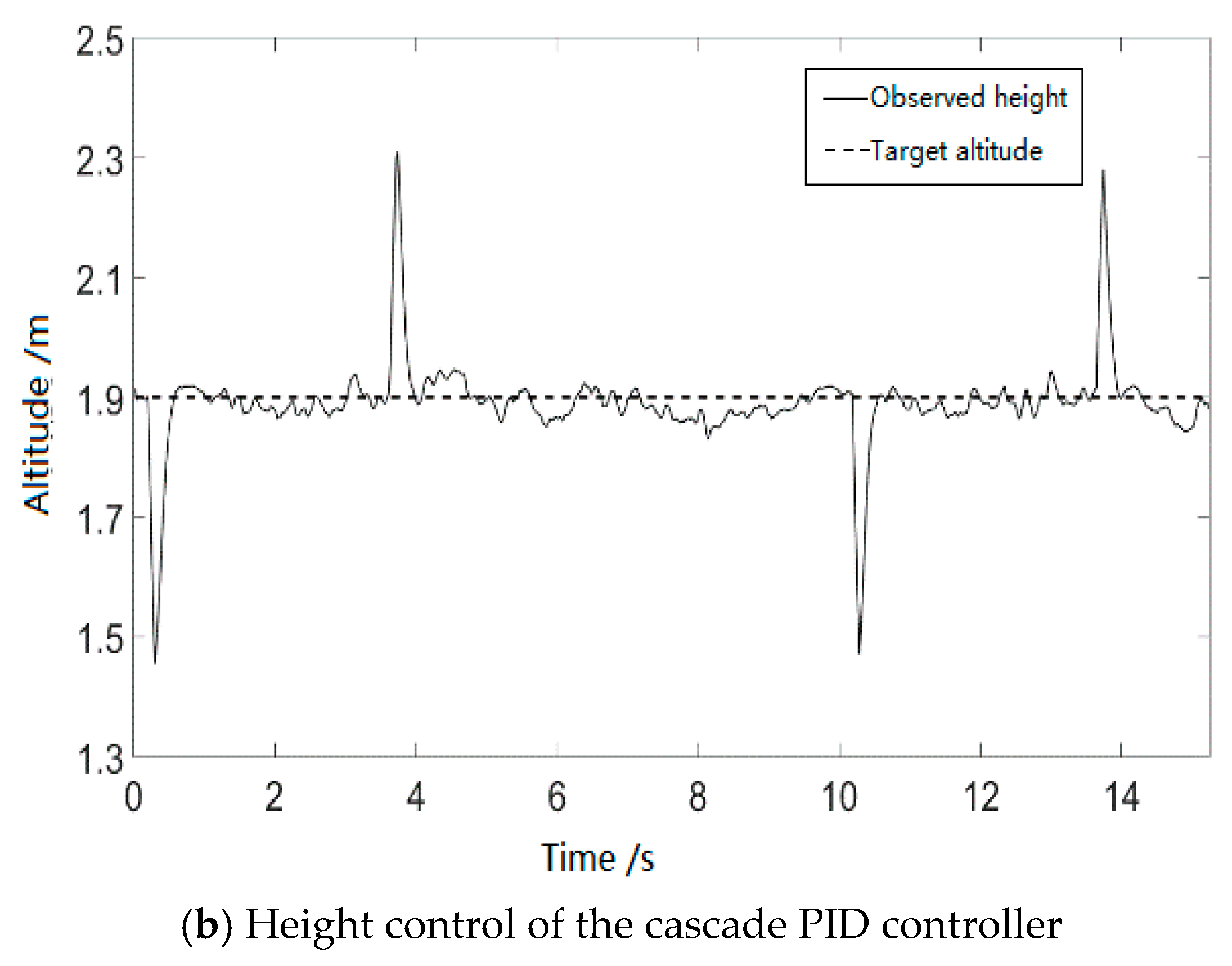
3.3. Height and Vertical Velocity Based on a Cascade PID Controller
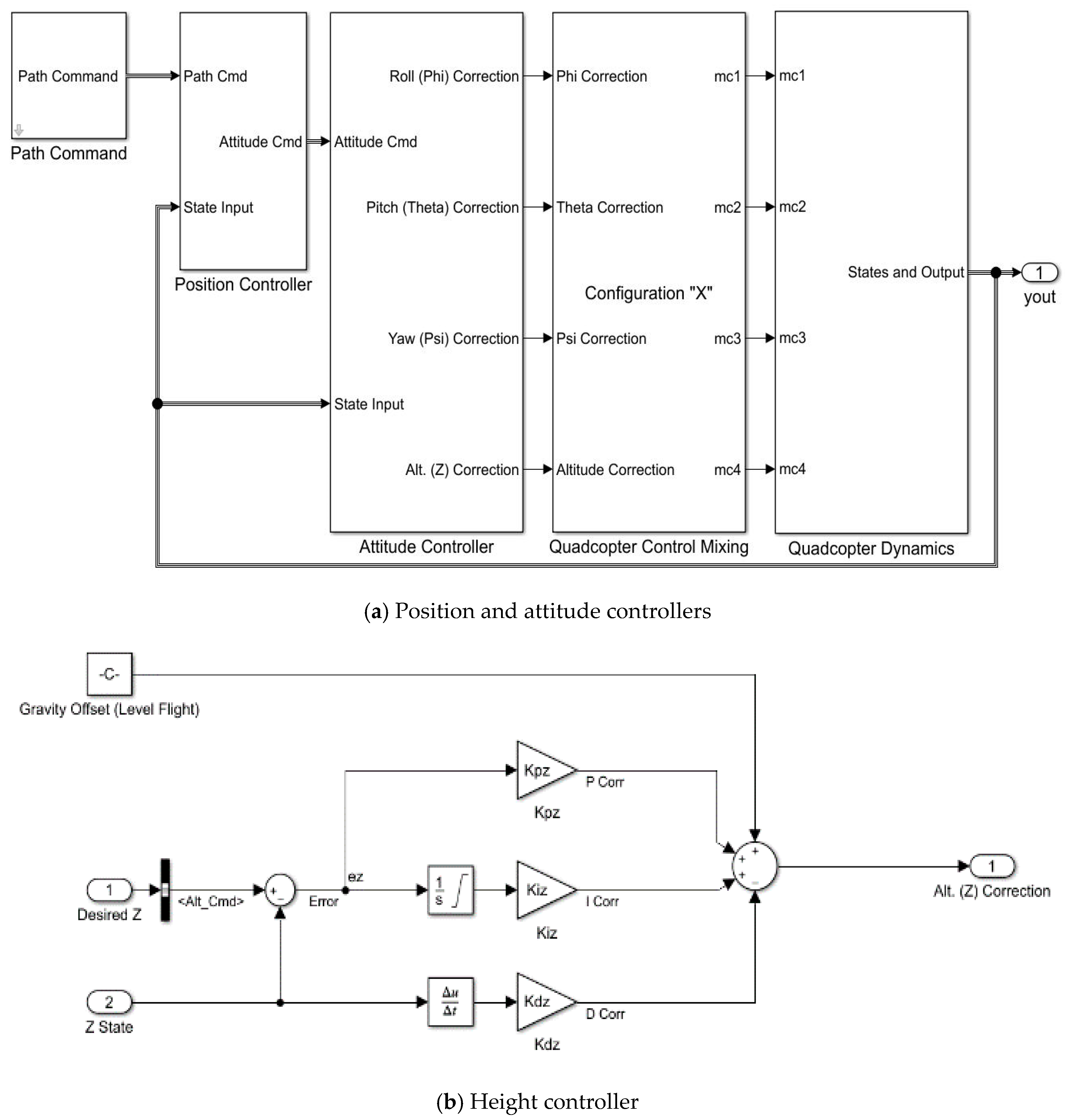
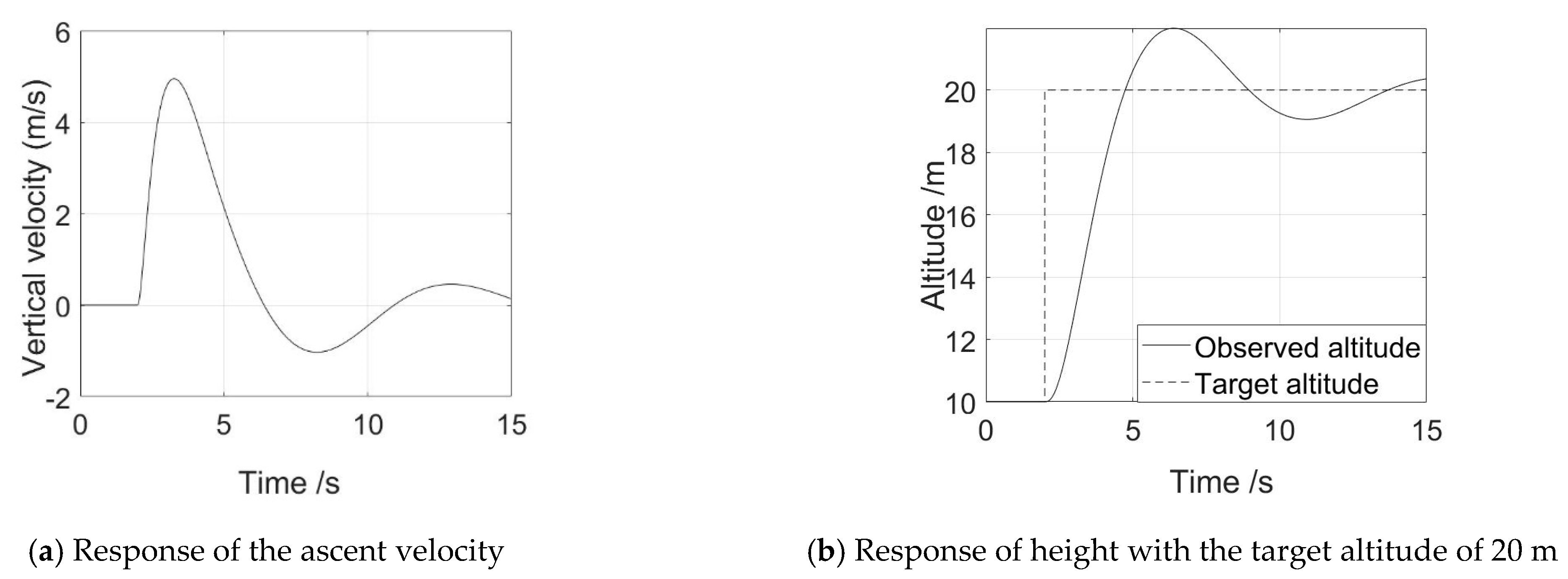
4. Simulation and Experiment Evaluations
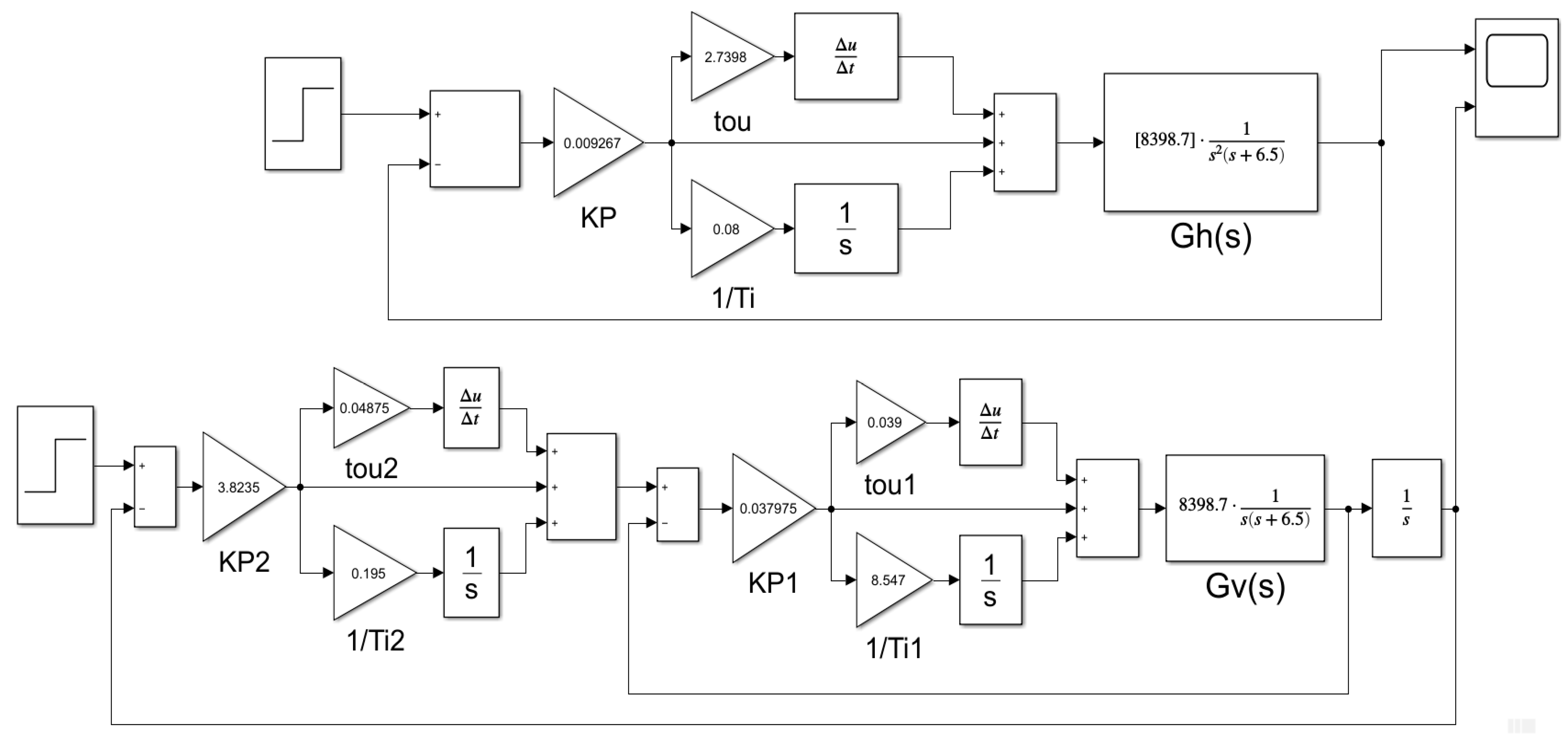
4.1. Simulink Parameter Tuning by Attenuation Curve
4.2. Carton Box Avoidance Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Herisse, B.; Oustrieres, S.; Hamel, T.; Mahony, R.; Russotto, F. A general optical flow based terrain-following strategy for a VTOL UAV using multiple views. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3341–3348. [Google Scholar]
- Armendariz, S.; Becerra, V.; Bausch, N. Bio-inspired Autonomous Visual Vertical and Horizontal Control of a Quadrotor Unmanned Aerial Vehicle. Electronics 2019, 8, 184. [Google Scholar] [CrossRef] [Green Version]
- Chang, G.; Xu, T.; Wang, Q.; Li, S.; Deng, K. GNSS attitude determination method through vectorization approach. IET Radar Sonar Navig. 2017, 11, 1477–1482. [Google Scholar] [CrossRef]
- Ponte, S.; Ariante, G.; Papa, U.; Del Core, G. An embedded platform for positioning and obstacle detection for small unmanned aerial vehicles. Electronics 2020, 9, 1175. [Google Scholar] [CrossRef]
- Kyriakis, P.; Moustris, G.P. Terrain Following for Fixed-Wing Unmanned Aerial Vehicles Using Feedback Equivalence. IEEE Control Syst. Lett. 2018, 3, 150–155. [Google Scholar] [CrossRef]
- Campos, I.; Nascimento, E.R.; Freitas, G.M.; Chaimowicz, L. A Height Estimation Approach for Terrain Following Flights from Monocular Vision. Sensors 2016, 16, 2071. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Gao, S.; Zhong, Y.; Gao, B.; Subic, A. Matrix weighted multi-sensor data fusion for INS/GNSS/CNS integration. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1011–1026. [Google Scholar] [CrossRef]
- Qin, F.; Chang, L.; Jiang, S.; Zha, F. A Sequential Multiplicative Extended Kalman Filter for Attitude Estimation Using Vector Observations. Sensors 2018, 18, 1414. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.; Hu, B. Robust Initial Attitude Alignment for SINS/DVL. IEEE/ASME Trans. Mechatron. 2018, 23, 2016–2021. [Google Scholar] [CrossRef]
- Batistoti, J.; Junior, J.M.; Ítavo, L.C.V.; Matsubara, E.; Gomes, E.; Oliveira, B.; De Souza, M.; Siqueira, H.; Filho, G.S.; Akiyama, T.; et al. Estimating Pasture Biomass and Canopy Height in Brazilian Savanna Using UAV Photogrammetry. Remote Sens. 2019, 11, 2447. [Google Scholar] [CrossRef] [Green Version]
- Micheletto, M.; Zubiaga, L.; Santos, R.; Galantini, J.; Cantamutto, M.; Orozco, J. Development and Validation of a LiDAR Scanner for 3D Evaluation of Soil Vegetal Coverage. Electronics 2020, 9, 109. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; He, B.; Yin, Q.; Mu, X.; Zhang, J.; Wan, J.; Wang, D.; Shen, Y. Fuzzy Optimized MFAC Based on ADRC in AUV Heading Control. Electronics 2019, 8, 608. [Google Scholar] [CrossRef] [Green Version]
- Kyristsis, S.; Antonopoulos, A.; Chanialakis, T.; Stefanakis, E.; Linardos, C.; Tripolitsiotis, A.; Partsinevelos, P. Towards Autonomous Modular UAV Missions: The Detection, Geo-Location and Landing Paradigm. Sensors 2016, 16, 1844. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, G.; Meng, T.; Zhang, H. Height Estimation of Ultrasonic Array Based on Integrated Navigation for UAVs. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 287–292. [Google Scholar]
- Rothe, J.; Zevering, J.; Strohmeier, M.; Montenegro, S. A Modified Model Reference Adaptive Controller (M-MRAC) Using an Updated MIT-Rule for the Altitude of a UAV. Electronics 2020, 9, 1104. [Google Scholar] [CrossRef]
- Iqbal, J.; Xu, R.; Halloran, H.; Li, C. Development of a Multi-Purpose Autonomous Differential Drive Mobile Robot for Plant Phenotyping and Soil Sensing. Electronics 2020, 9, 1550. [Google Scholar] [CrossRef]
- Tang, W.; Wang, L.; Gu, J.; Gu, Y. Single Neural Adaptive PID Control for Small UAV Micro-Turbojet Engine. Sensors 2020, 20, 345. [Google Scholar] [CrossRef] [Green Version]
- Sieberling, S.; Chu, Q.; Mulder, J.A. Robust Flight Control Using Incremental Nonlinear Dynamic Inversion and Angular Acceleration Prediction. J. Guid. Control Dyn. 2010, 33, 1732–1742. [Google Scholar] [CrossRef]
- Kiji, S. PID vs LQR controller for tilt rotor airplane. Int. J. Electr. Comput. Eng. 2020, 10, 6309–6318. [Google Scholar]
- Huang, S.N.; Tan, K.K.; Lee, T.H. Further results on adaptive control for a class of nonlinear systems using neural networks. IEEE Trans. Neural Netw. 2003, 14, 719–722. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The Lateral Tracking Control for the Intelligent Vehicle Based on Adaptive PID Neural Network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef] [Green Version]
- Munguía, R.; Urzua, S.; Grau, A. EKF-Based Parameter Identification of Multi-Rotor Unmanned Aerial VehiclesModels. Sensors 2019, 19, 4174. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Tao, G. Adaptive Actuator Compensation Control with Feedback Linearization. IEEE Trans. Autom. Control 2000, 1, 1705–1710. [Google Scholar] [CrossRef]
- Doman, D.B.; Ngo, A.D. Dynamic Inversion-Based Adaptive/Reconfigurable Control of the X-33 on Ascent. J. Guid. Control Dyn. 2002, 25, 275–284. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Deyst, J.; How, J. A New Nonlinear Guidance Logic for Trajectory Tracking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; pp. 941–956. [Google Scholar] [CrossRef] [Green Version]
- Mahony, R.; Hamel, T.; Pflimlin, J.-M. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Chen, W.; Yang, L.; Wei, D. An Optimal Terrain Following Trajectory Online Regeneration Method. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 1074–1080. [Google Scholar]
- Idres, M.; Mustapha, O.; Okasha, M. Quadrotor trajectory tracking using PID cascade control. IOP Conf. Ser. Mater. Sci. Eng. 2017, 270, 12010. [Google Scholar] [CrossRef]
- Ren, J.; Liu, D.-X.; Li, K.; Liu, J.; Feng, Y.; Lin, X. Cascade PID controller for quadrotor. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 120–124. [Google Scholar] [CrossRef]
- Kumar, Y.P.; Rajesh, A.; Yugandhar, S.; Srikanth, V. Cascaded PID Controller Design for Heating Furnace Temperature Control. IOSR J. Electron. Commun. Eng. 2013, 5, 76–83. [Google Scholar] [CrossRef]
- Saini, P.; Kumar, R.; Rajput, N. Cascade—PID control of a nonlinear chemical process. Nonlinear Stud. 2016, 23, 563–570. [Google Scholar]
- Simalatsar, A.; Guidi, M.; Buclin, T. Cascaded PID controller for anaesthesia delivery. In Proceedings of the 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 533–536. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Su, W.; Liu, Z. PID controllers: Design and tuning methods. In Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 808–813. [Google Scholar]
- Shi, X.; Wang, Q.; Wu, Y. Research on Parameters Tuning of PID Controller Based on Critical Proportioning Method. In Proceedings of the 2016 International Conference on Electrical, Mechanical and Industrial Engineering; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 169–172. [Google Scholar]
- Zhu, Q.; Qiu, B. Research on Trajectory Tracking Control of Aircraft in Carrier Landing. In Proceedings of the Third International Conference on Instrumentation, Measurement, Computer, Communication and Control, Shenyang, China, 21–23 September 2013; pp. 1452–1455. [Google Scholar] [CrossRef]
- Henrique, A.; Fayad, K. Quadrotor Control using Optical-Flow Navigation. Master’s Thesis, Instituto Superior Técnico, Lisbon, Portugal, October 2014. [Google Scholar]
- Sokolovic, V.; Dikic, G. Stancic, R. Integration of INS, GPS, magnetometer and barometer for improving accuracy navigation of the vehicle. Def. Sci. J. 2013, 63, 451–455. [Google Scholar] [CrossRef] [Green Version]
- Tong, J.; Xu, X.; Zhang, T.; Zhang, L.; Li, Y. Study on Installation Error Analysis and Calibration of Acoustic Transceiver Array Based on SINS/USBL Integrated System. IEEE Access 2018, 6, 66923–66939. [Google Scholar] [CrossRef]
- Livshitz, A.; Idan, M. Adaptive Laser-Range-Finder Terrain-Following Approach. In Proceedings of the 27th Mediterranean Conference on Control and Automation (MED), Akko, Israel, 1–4 July 2019; pp. 612–617. [Google Scholar]
- Dill, E.T.; Young, S.D.; De Haag, M.U. GPS/Optical/Inertial Integration for 3D Navigation Using Multi-Copter Platforms. In Proceedings of the ION 2017 Pacific PNT Meeting, Honolulu, HI, USA, 1–4 May 2017; pp. 1093–1103. [Google Scholar] [CrossRef] [Green Version]
- Efe, M. Önder Sliding Mode Control for Unmanned Aerial Vehicles Research. Recent Dev. Ind. Control Syst. Resil. 2015, 22, 239–255. [Google Scholar] [CrossRef]
- Sabatino, F. Quadrotor Control: Modeling, Nonlinear Control Design and Simulation. Master’s Thesis, KTH, School of Electrical Engineering (EES), Stockholm, Sweden, 2015. [Google Scholar]
- Ahmed, A.H.; Ouda, A.N.; Kamel, A.M.; Elhalwagy, Y.Z. Attitude stabilization and altitude control of quadrotor. In Proceedings of the 12th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 28–29 December 2016; pp. 123–130. [Google Scholar]
- Hetényi, D.; Gótzy, M.; Blázovics, L. Sensor fusion with enhanced Kalman Filter for altitude control of quadrotors. In Proceedings of the IEEE 11th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 12–14 May 2016; pp. 413–418. [Google Scholar] [CrossRef]
- Emran, B.J.; Al-Omari, M.; Abdel-Hafez, M.F.; Jaradat, M.A. A Cascaded Approach for Quadrotor’s Attitude Estimation. Procedia Technol. 2014, 15, 268–277. [Google Scholar] [CrossRef] [Green Version]
- Zhou, P.; Huang, G.; Zhang, L.; Tsang, K.F. Wireless sensor network based monitoring system for a large-scale indoor space: Data process and supply air allocation optimization. Energy Build. 2015, 103, 365–374. [Google Scholar] [CrossRef]
- Paing, H.S.; Schagin, A.V.; Win, K.S.; Linn, Y.H. New Designing Approaches for Quadcopter Using 2D Model Modelling a Cascaded PID Controller. In Proceedings of the IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St. Petersburg, Russia; Moscow, Russia, 27–30 January 2020; pp. 2370–2373. [Google Scholar]
- Zhang, X. Improved Kalman Algorithm for Vertical Height and Velocity Information Fusion of Multi-rotor Unmanned Aerial Vehicle. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3056–3059. [Google Scholar] [CrossRef]
- Hu, G.; Wang, W.; Zhong, Y.; Gao, B.; Gu, C. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Chang, G.; Xu, T.; Wang, H. M-estimator based robust unscented Kalman filter through statistical linearization. Trans. Inst. Meas. Control 2018, 41, 2016–2025. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Measurements |
|---|---|---|
| g | m/s2 | 9.81 |
| m | kg | 1.12 |
| l | m | 0.225 |
| cT | N s2/rad2 | 1.394 × 10−7 |
| cM | N m s2/rad2 | 2.857 × 10−9 |
| Ixx | kg m2 | 0.0093 |
| Iyy | kg m2 | 0.0088 |
| Izz | kg m2 | 0.0189 |
| Controller | Proportional Band | Integration Time | Derivative Time |
|---|---|---|---|
| P | 0 | ||
| PI | 1.2 | 0 | |
| PID | 0.8 |
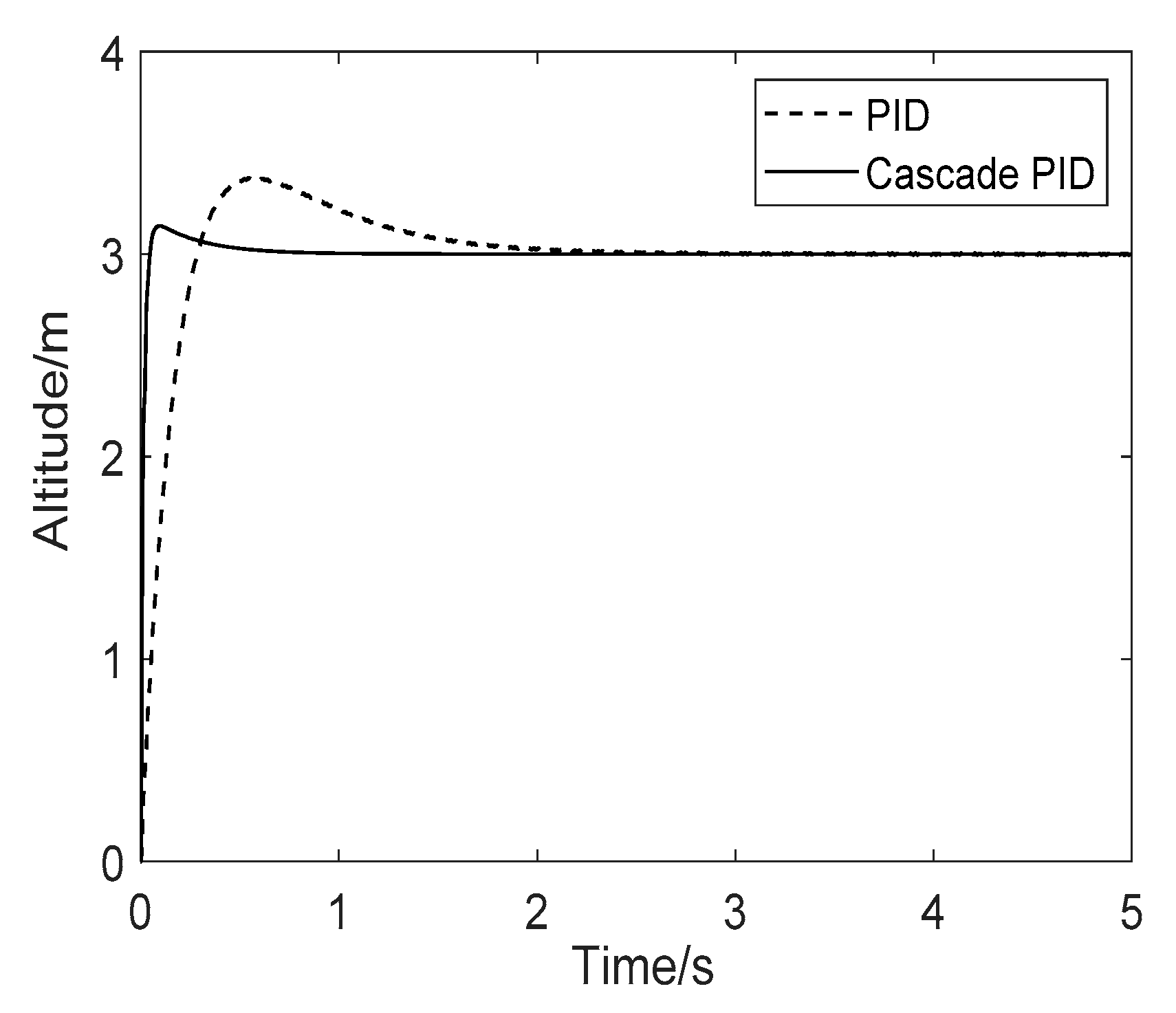
| Dynamic Performance Index | PID | Cascade PID |
|---|---|---|
| Overshoot | 12.6% | 4.6% |
| Settling time | 4.427 | 1.352 |
| Rise time | 0.807 | 0.540 |
| Peak time | 1.338 | 0.190 |
| Parameter | Value |
|---|---|
| 1.2 | |
| 1542 | |
| 0.153 |
| Variables | Values/m |
|---|---|
| Height of the obstacle (the box) | 0.48 |
| Width of the obstacle (the box) | 1.2 |
| Travel speed of the quadrotor (m/s) | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Huang, Y.; Yang, H.; Zhang, T.; Wang, Z.; Liu, X. Real-Time Terrain-Following of an Autonomous Quadrotor by Multi-Sensor Fusion and Control. Appl. Sci. 2021, 11, 1065. https://doi.org/10.3390/app11031065
Yang Y, Huang Y, Yang H, Zhang T, Wang Z, Liu X. Real-Time Terrain-Following of an Autonomous Quadrotor by Multi-Sensor Fusion and Control. Applied Sciences. 2021; 11(3):1065. https://doi.org/10.3390/app11031065
Chicago/Turabian StyleYang, Yuan, Yongjiang Huang, Haoran Yang, Tingting Zhang, Zixuan Wang, and Xixiang Liu. 2021. "Real-Time Terrain-Following of an Autonomous Quadrotor by Multi-Sensor Fusion and Control" Applied Sciences 11, no. 3: 1065. https://doi.org/10.3390/app11031065
APA StyleYang, Y., Huang, Y., Yang, H., Zhang, T., Wang, Z., & Liu, X. (2021). Real-Time Terrain-Following of an Autonomous Quadrotor by Multi-Sensor Fusion and Control. Applied Sciences, 11(3), 1065. https://doi.org/10.3390/app11031065