
Optimal Control of a Spark Ignition Engine Including Cold Start Operations for Consumption/Emissions Compromises

 ,
,  , and
, and 
Abstract
1. Introduction
- A simple backward model of the drivetrain (i.e., from drive cycle to engine) as described by [18] to calculate at each time step the engine speed and torque.
- Simple forms to describe the behavior of emissions with a semi empirical model based on experimental data.
- A catalytic converter model describing its thermal and efficiency behaviors with only one spatial discretization as proposed by Pandey et al. [6].
- A dynamic programming algorithm to calculate the optimal control parameters of the engine over an entire drive cycle by minimizing a weighted sum of pollutant emissions and fuel consumption. This implementation was derived from [20].
2. Models and Methods
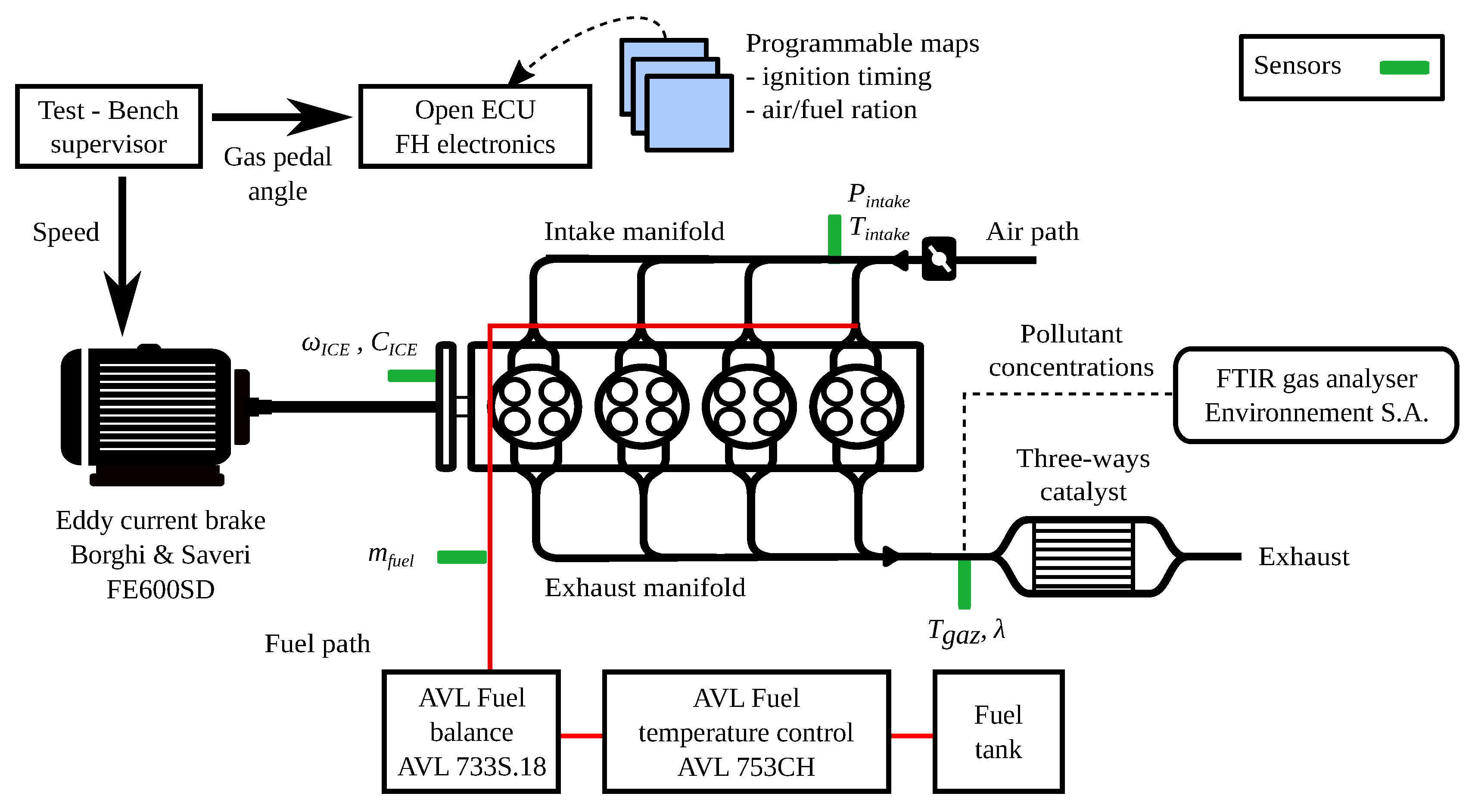
2.1. Experimental Setup and Procedure
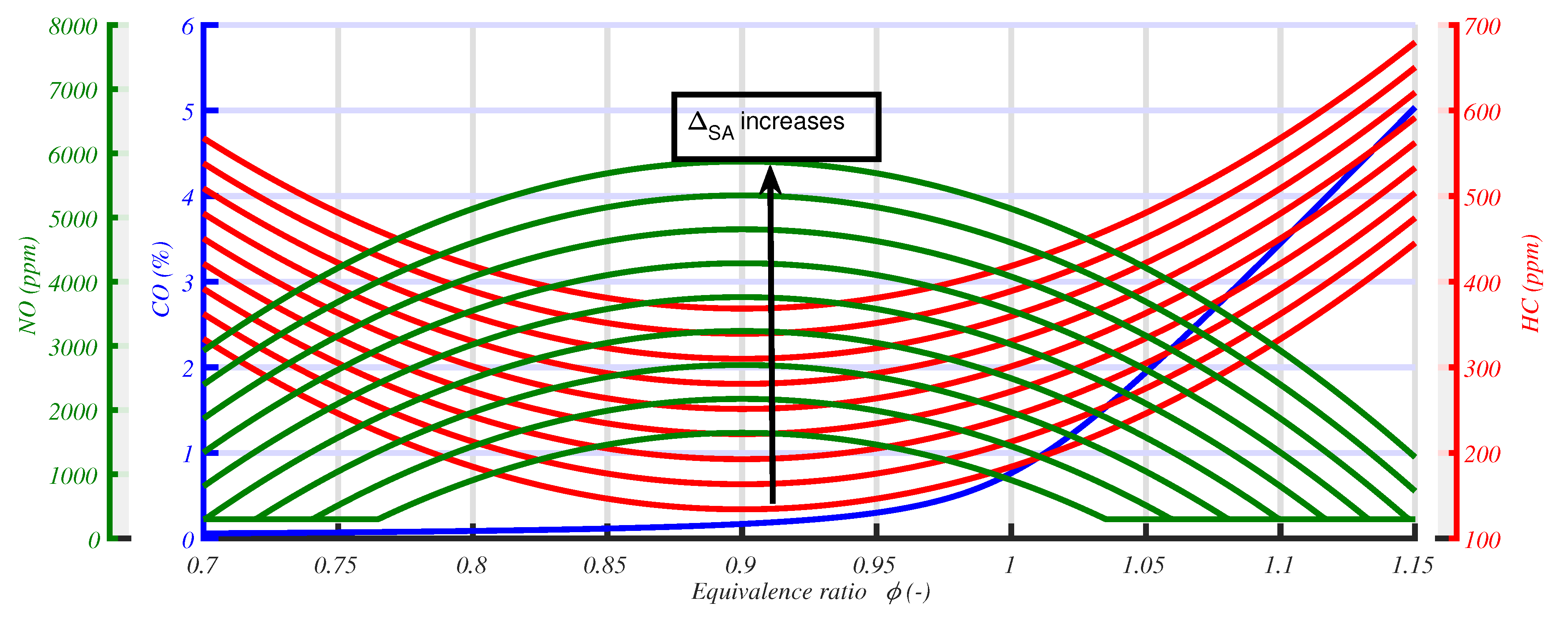
2.2. Emissions Model
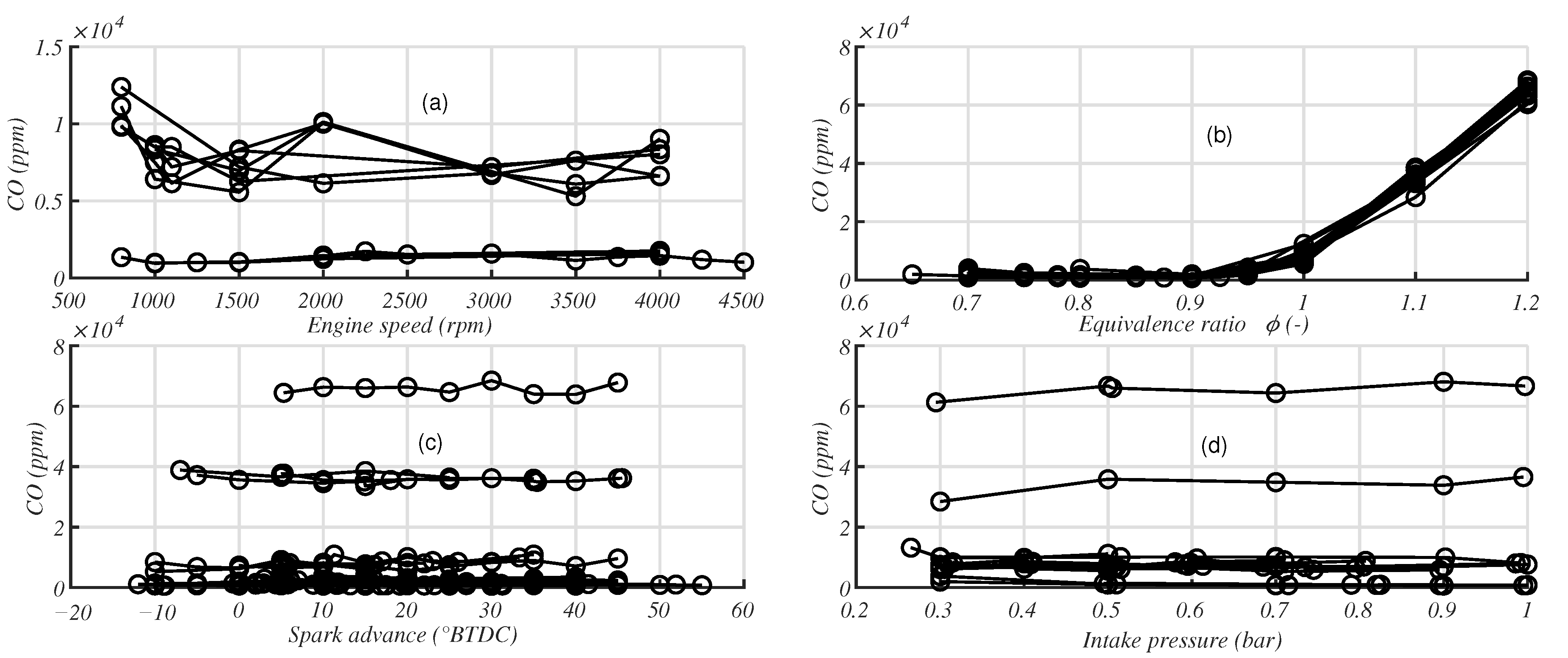
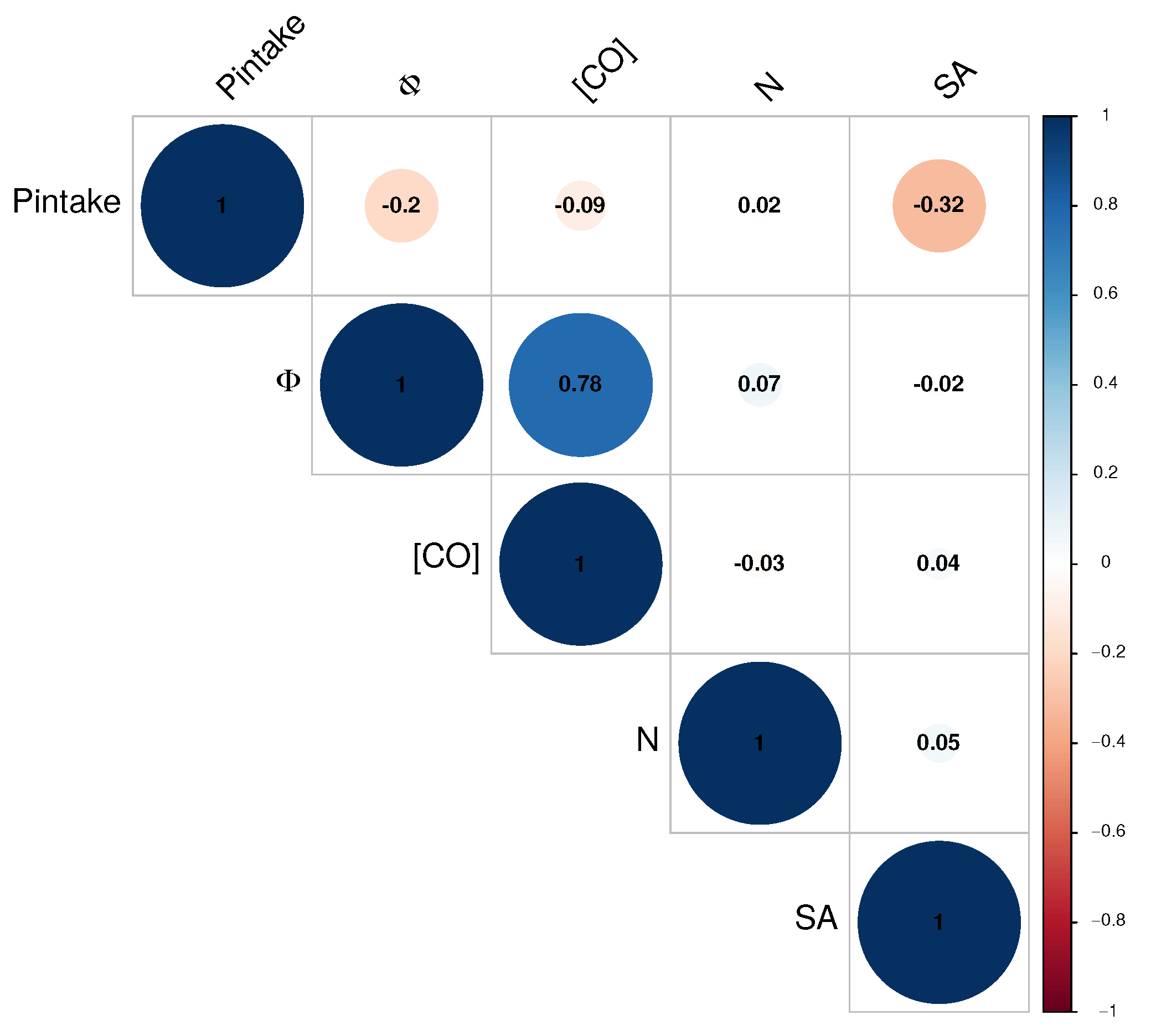
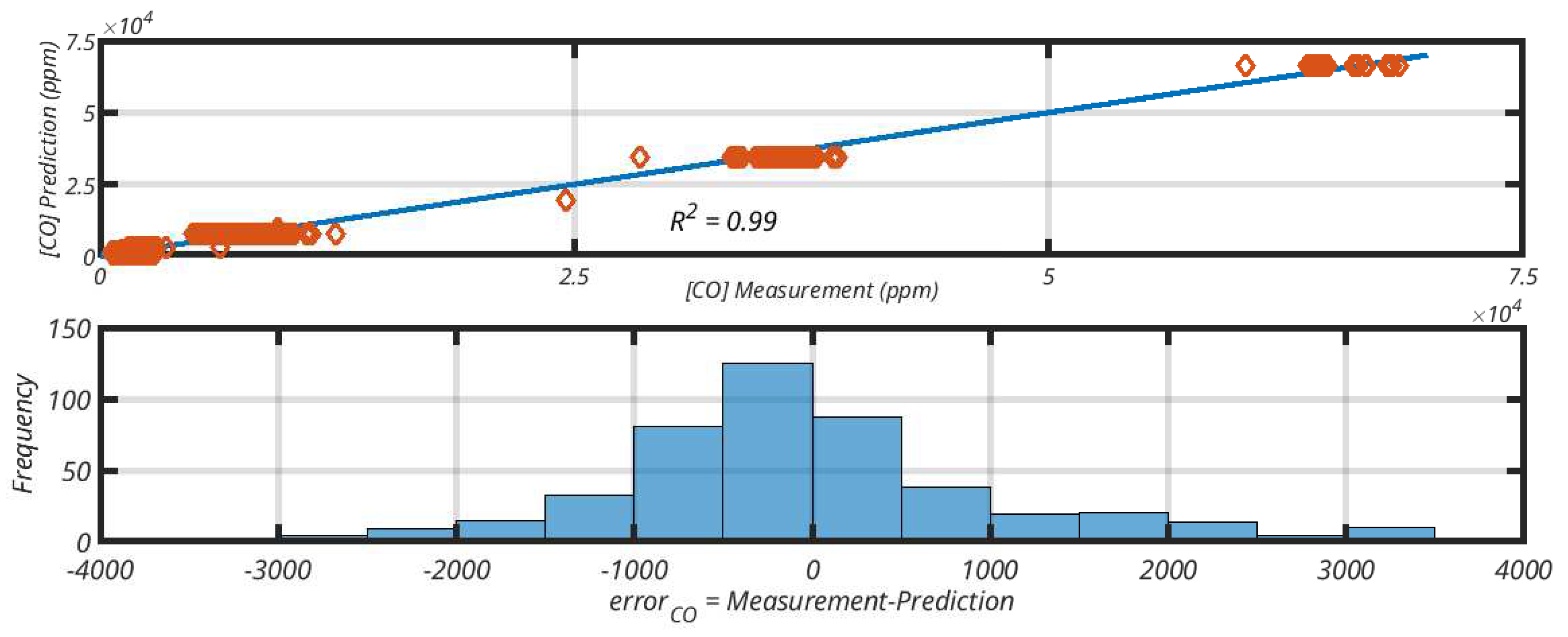
2.2.1. CO Model
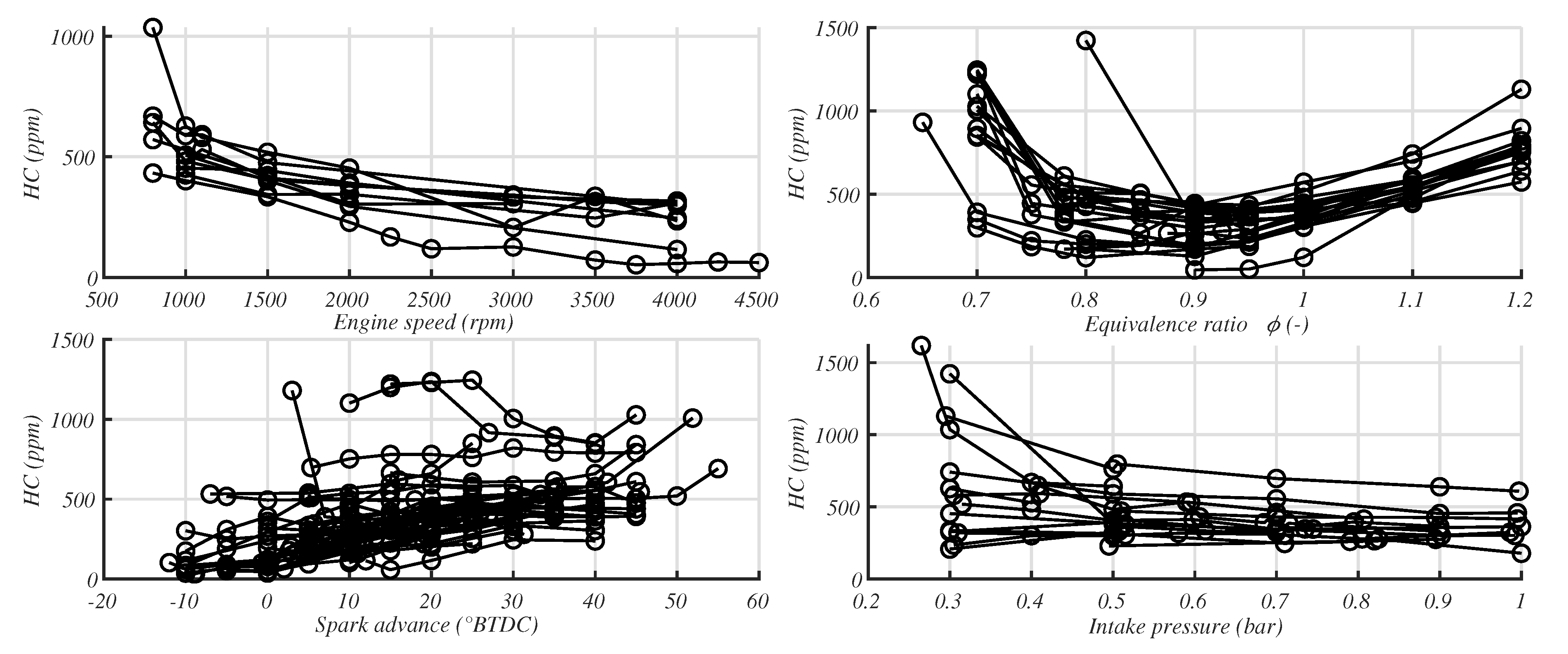
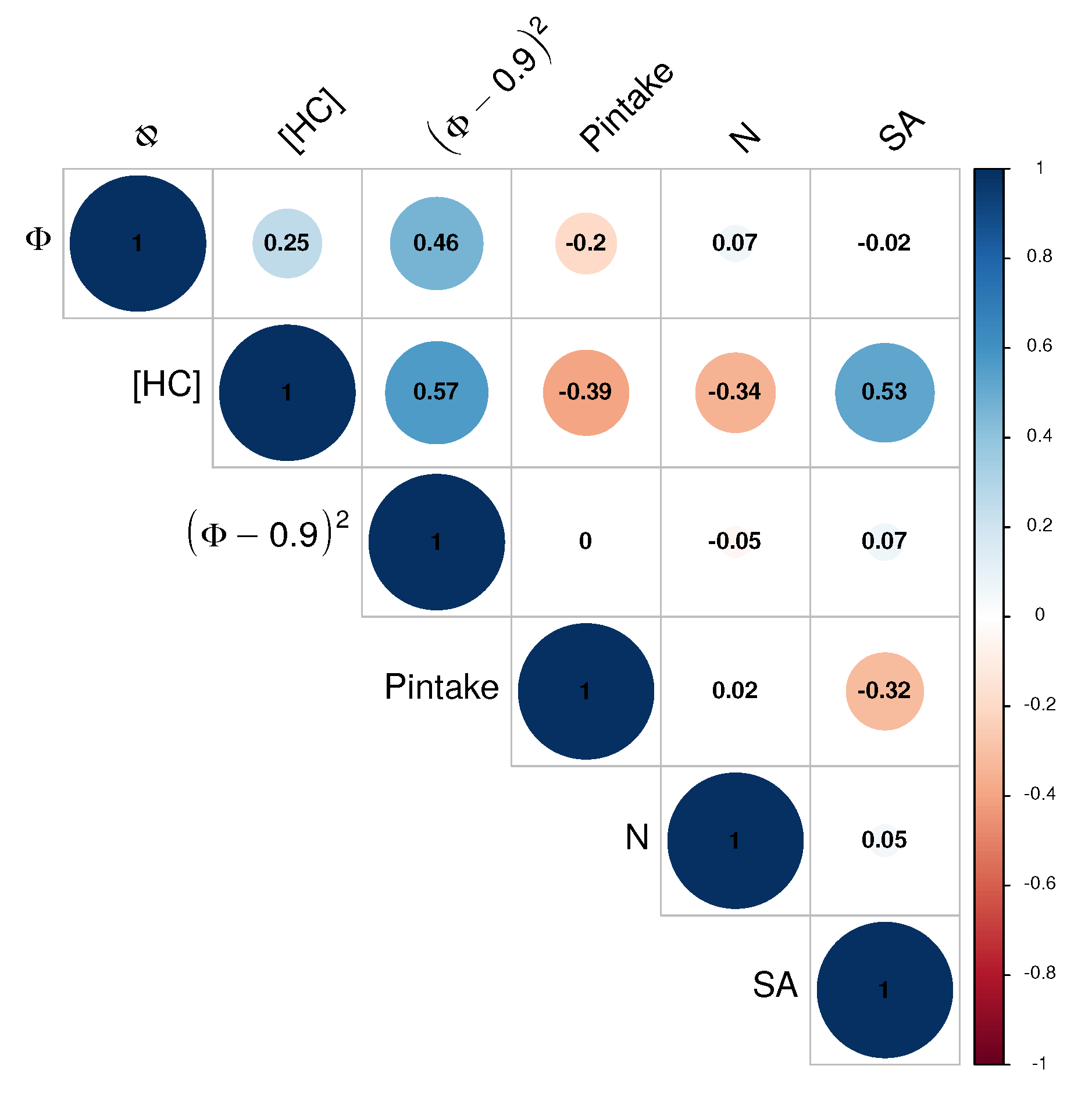
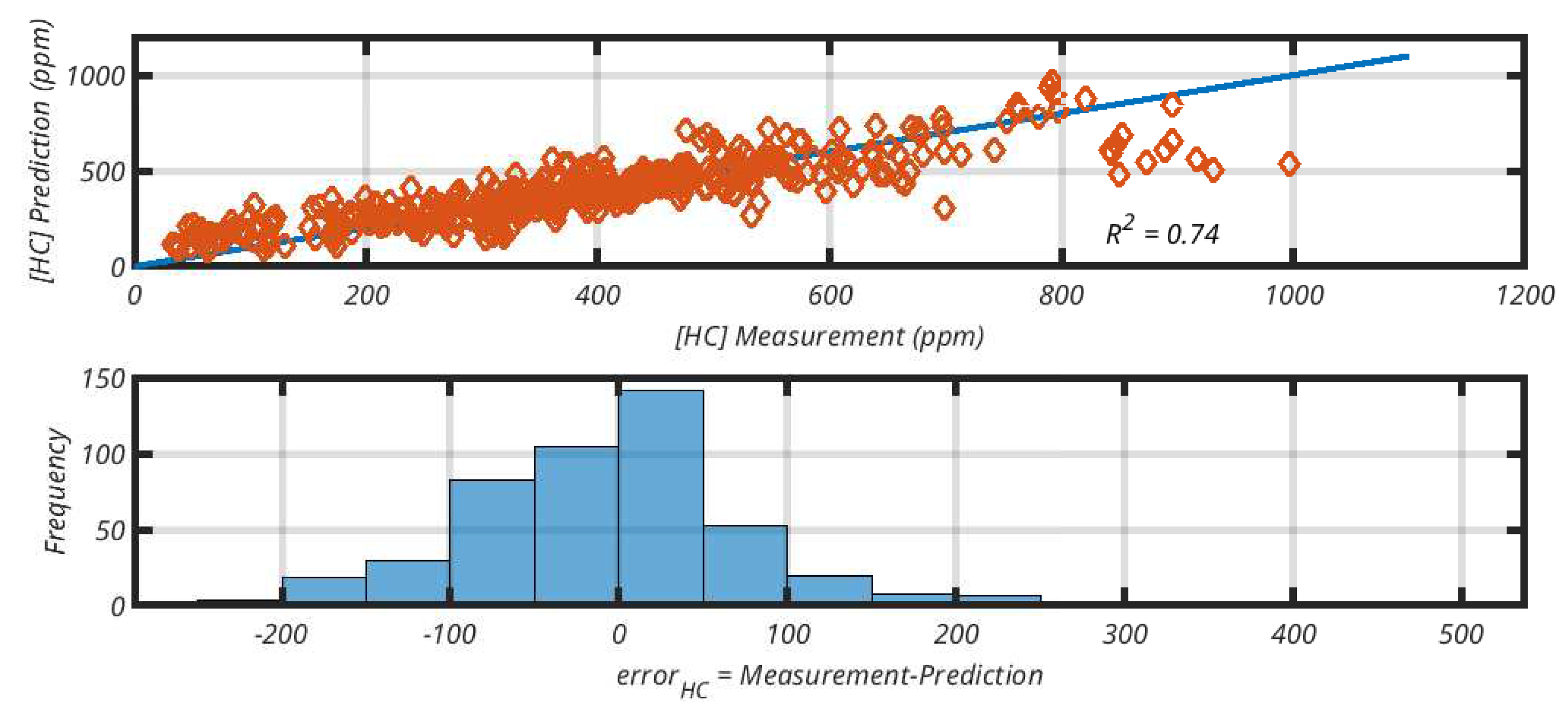
2.2.2. HC Model
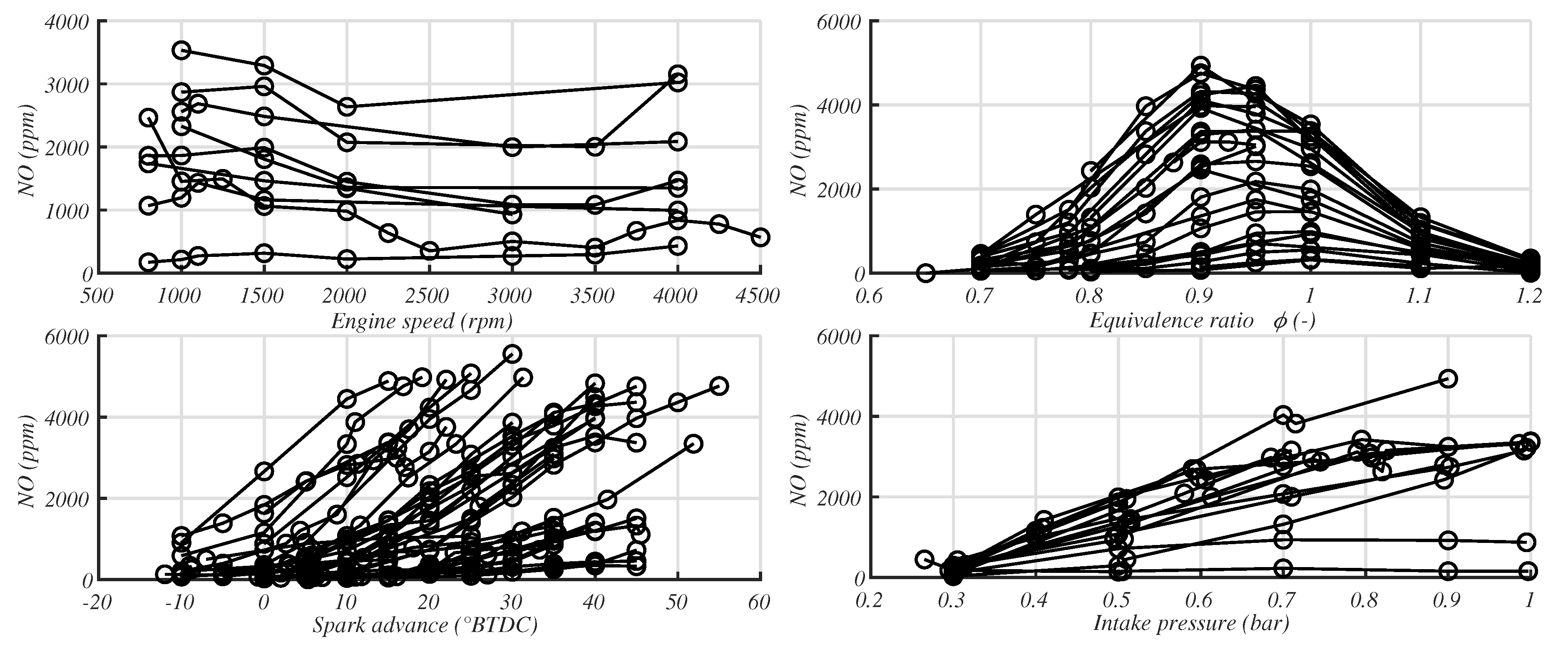
2.2.3. NO Model
- Early NO are formed at the flame front and in fuel-rich areas. They result from the combination of nitrogen N2 with hydrocarbon radicals (C, C2, CH2 or CH2) to give the intermediate products HN, HCN, CN or CNH2. These can recombine with oxygen to give nitrogen oxide NO [21].
- The NO-fuel are derived from the oxidation of the nitrogen atoms present in the fuel [26].
2.3. Internal Combustion Engine Model
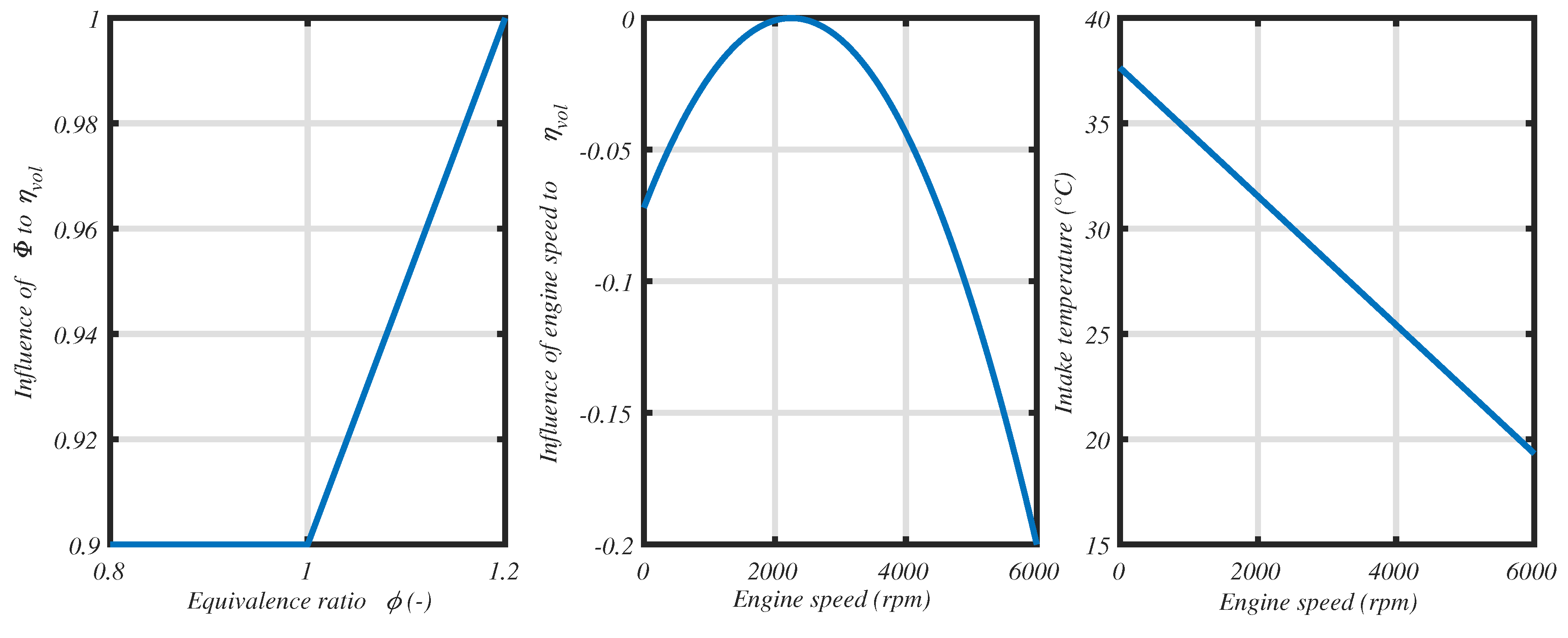
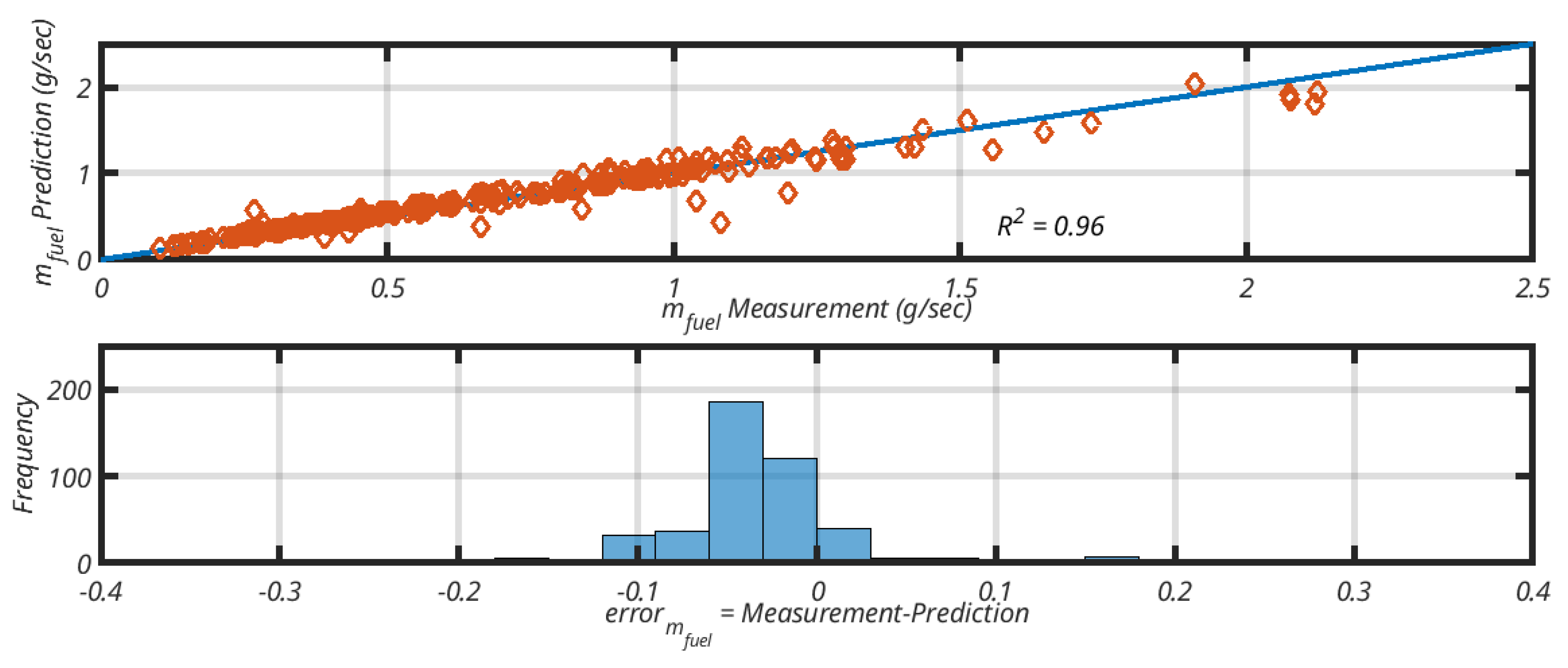
2.3.1. Fuel Flow
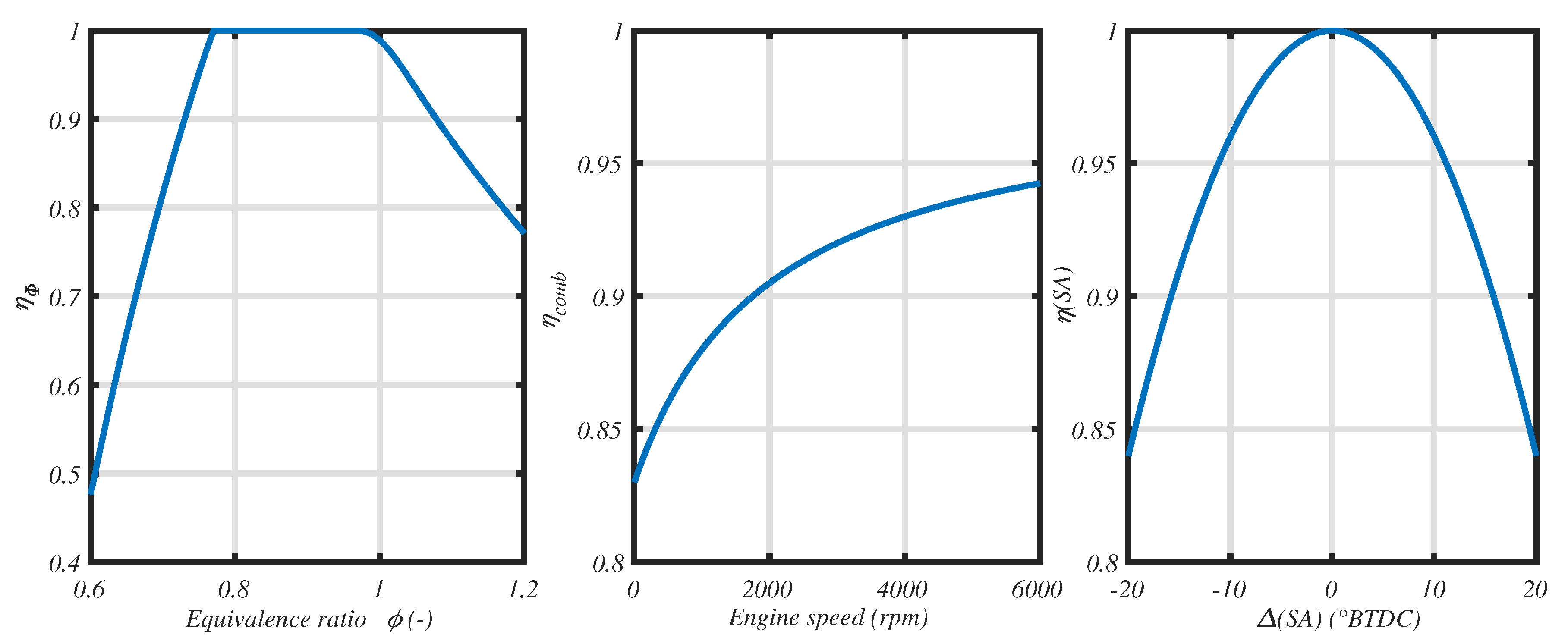
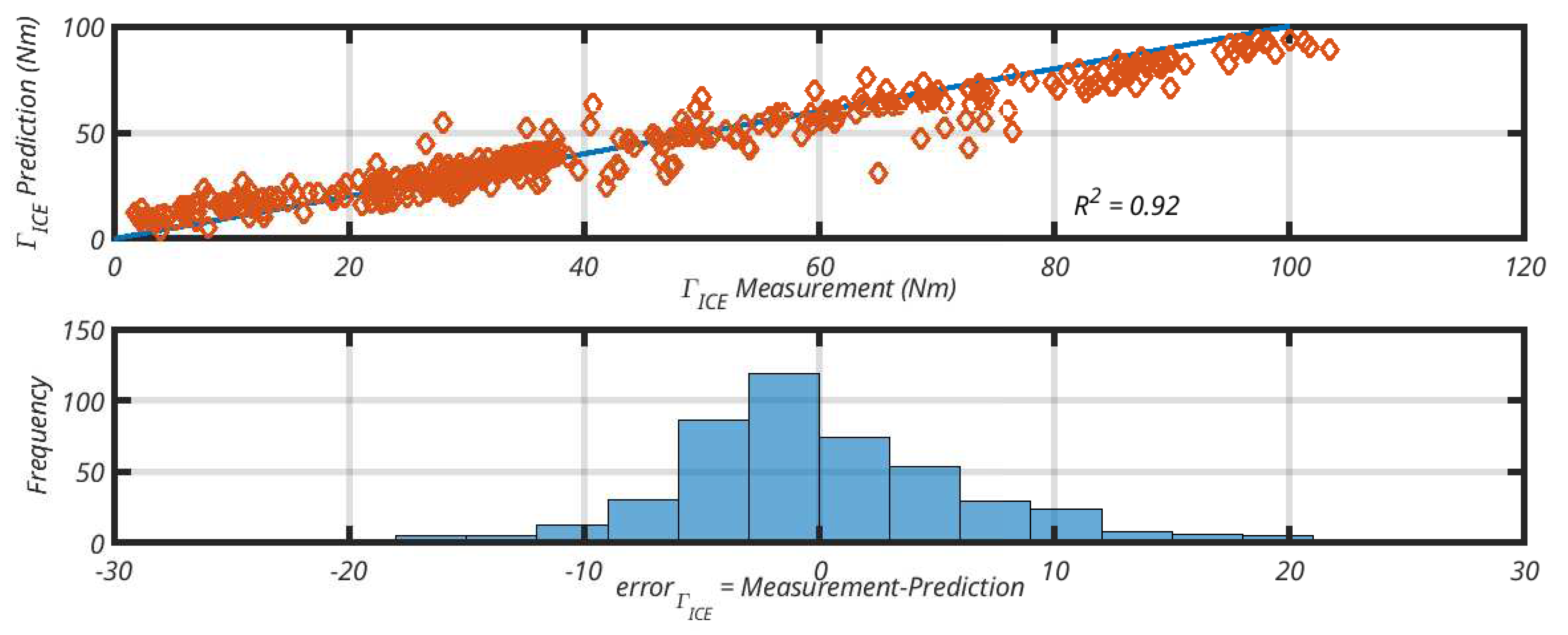
2.3.2. Brake Torque
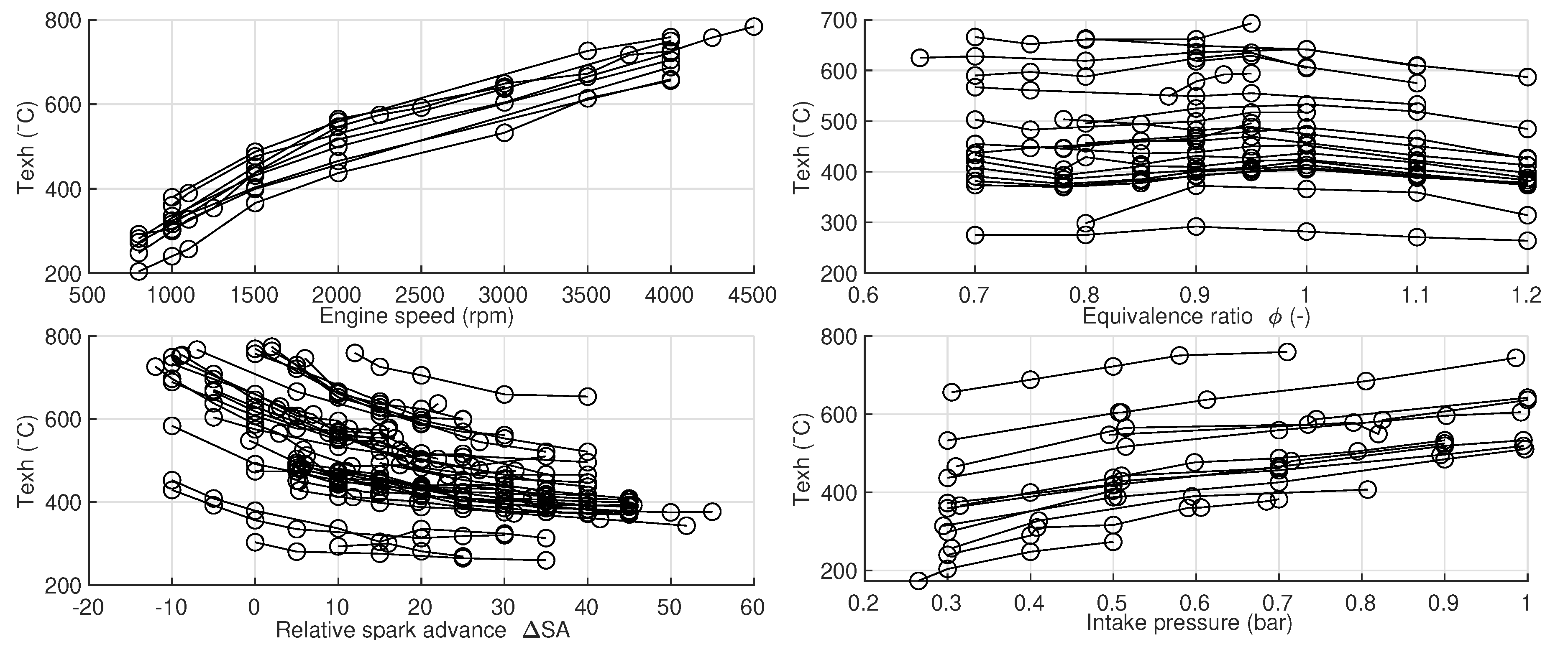
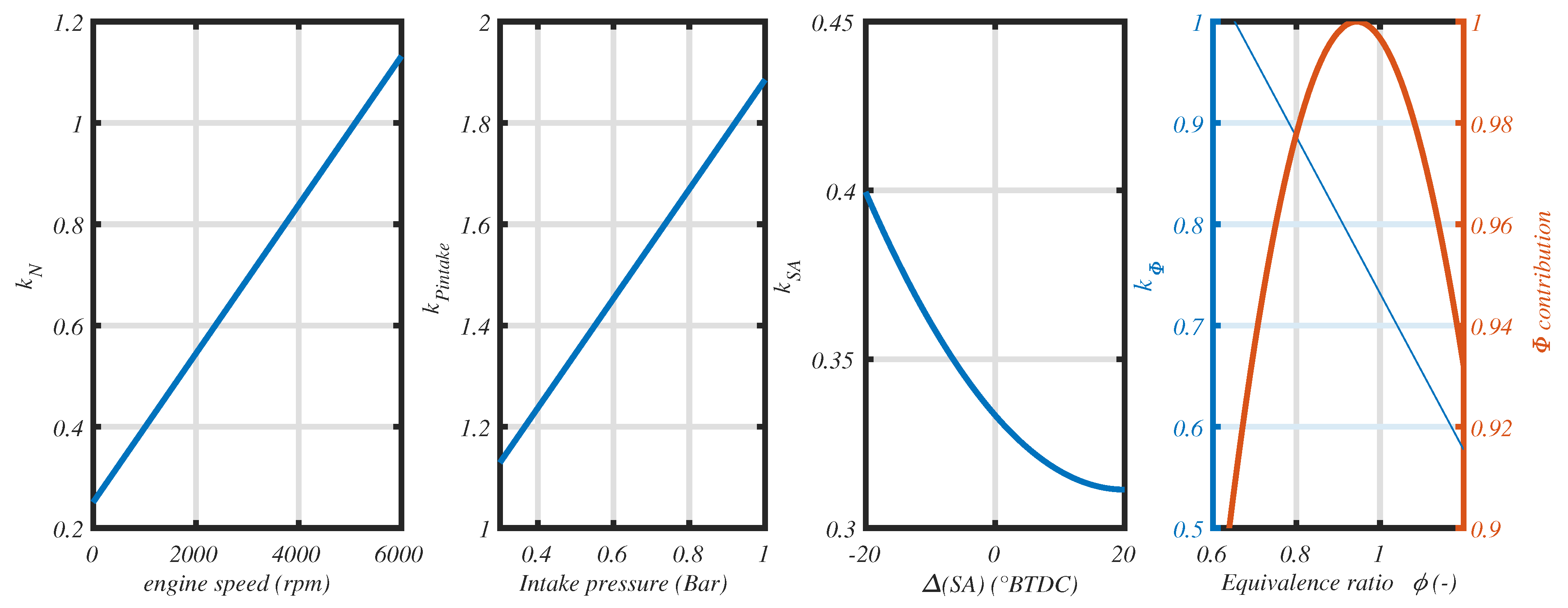
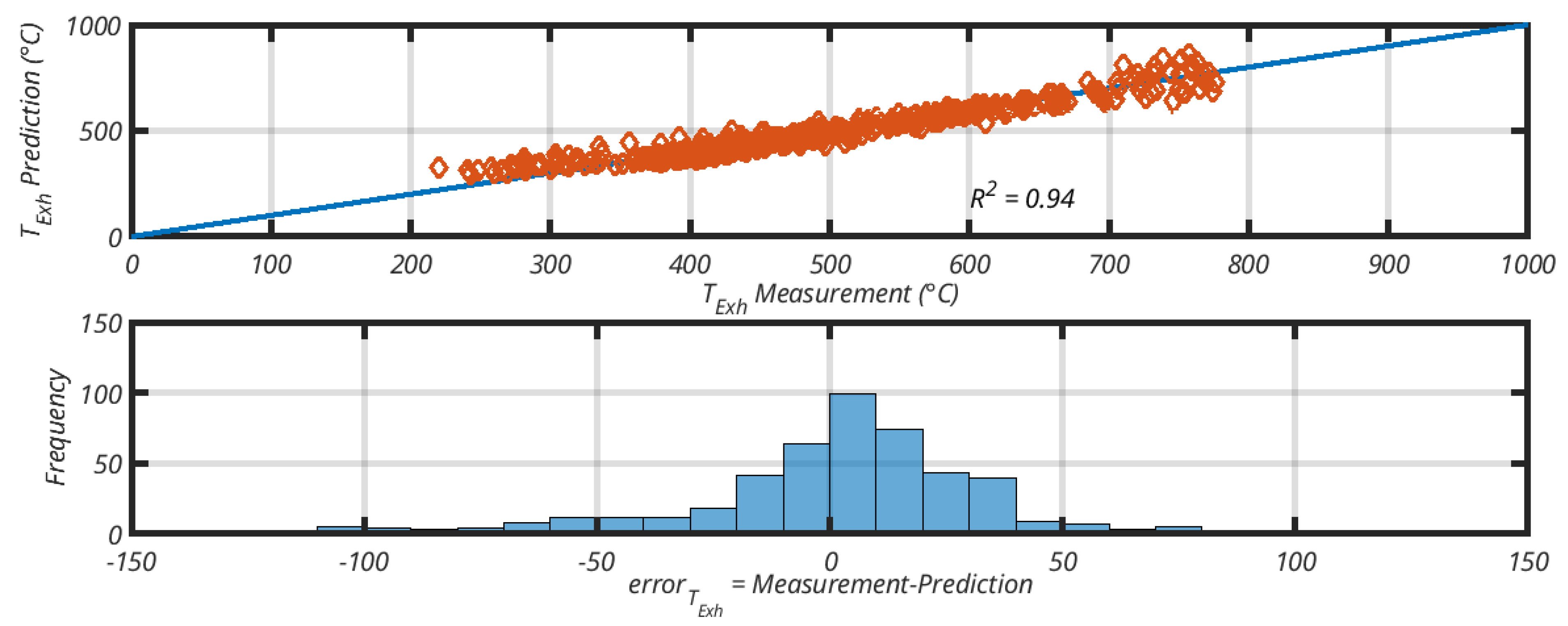
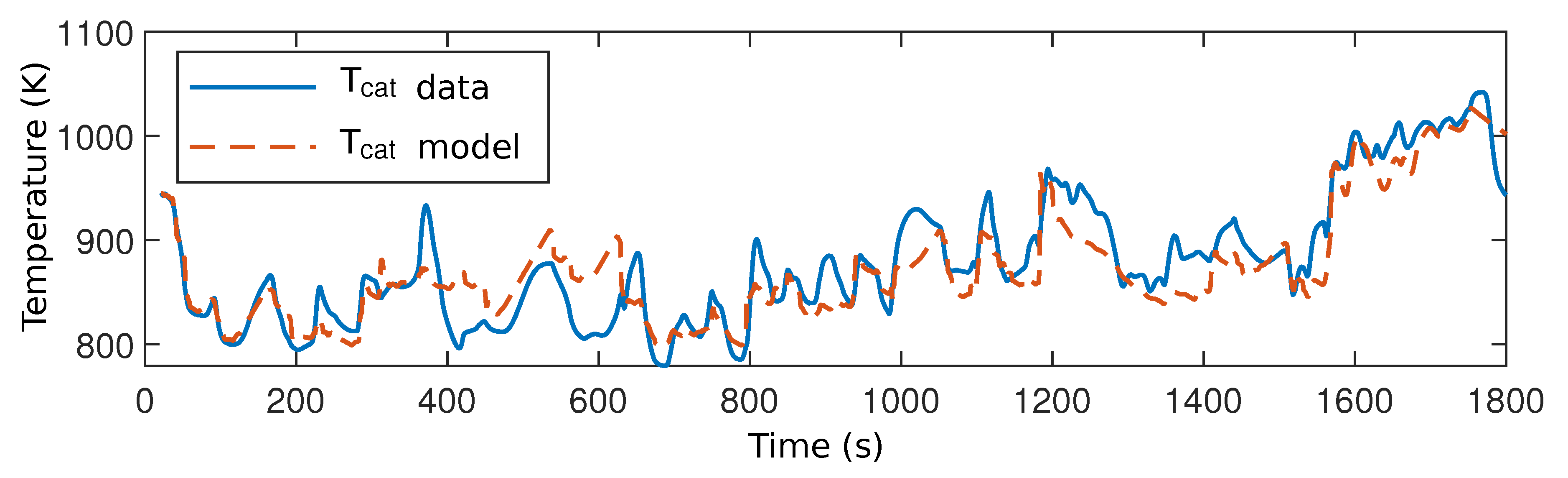
2.3.3. Exhaust Temperature
2.4. Catalyst Model
2.5. Vehicle Dynamics
2.6. Problem Formulation and Discretization Values
3. Results
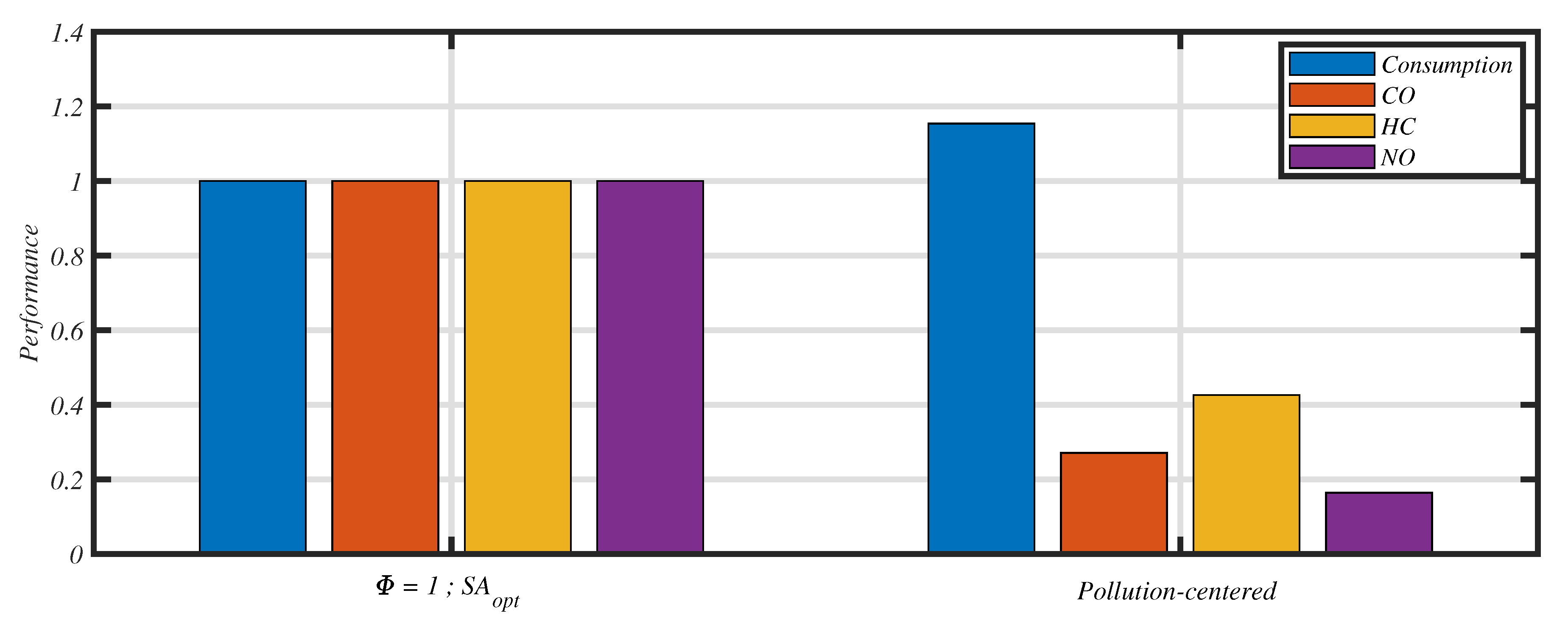
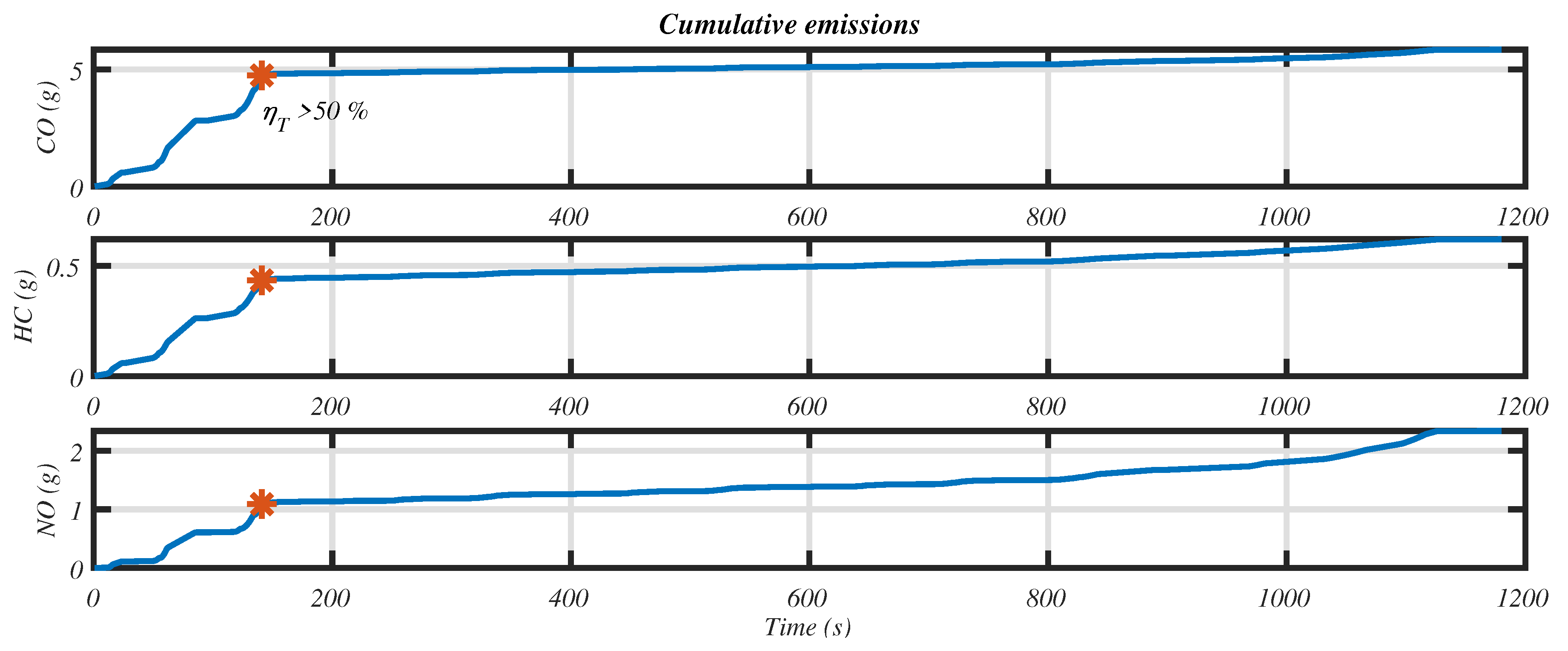
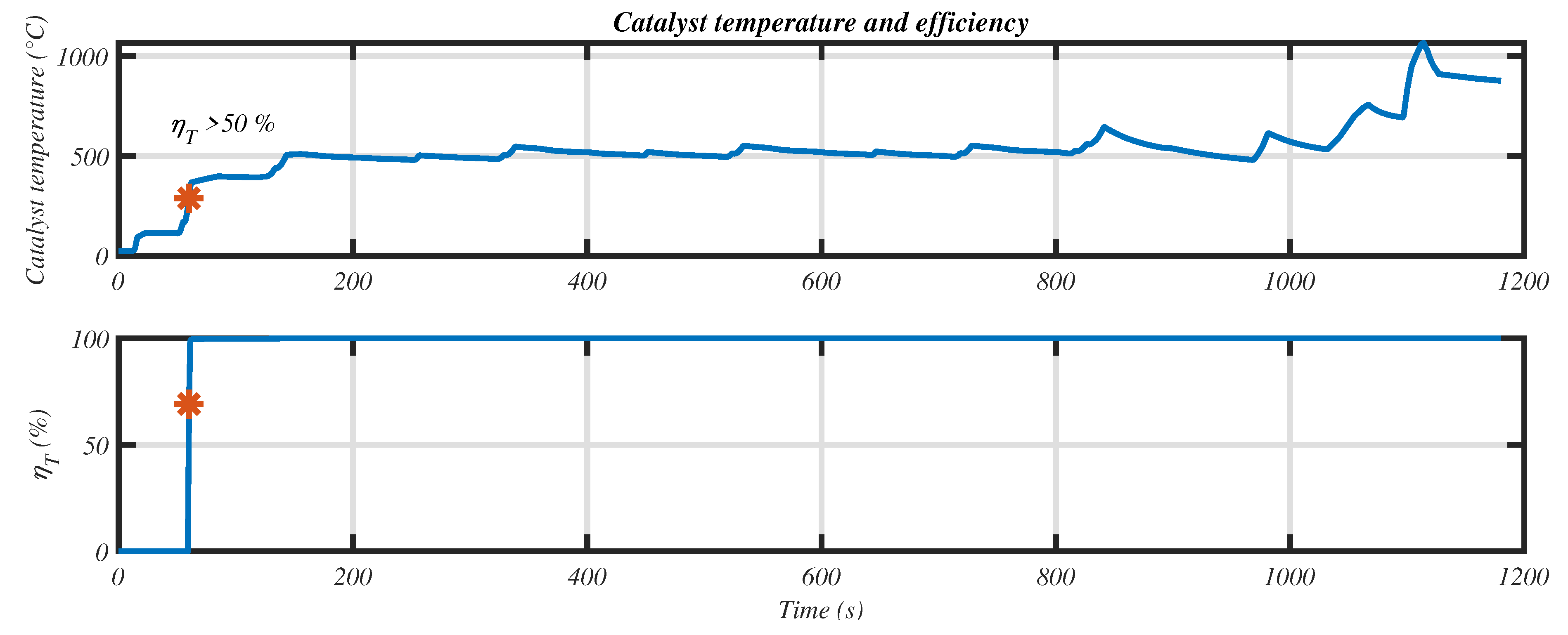
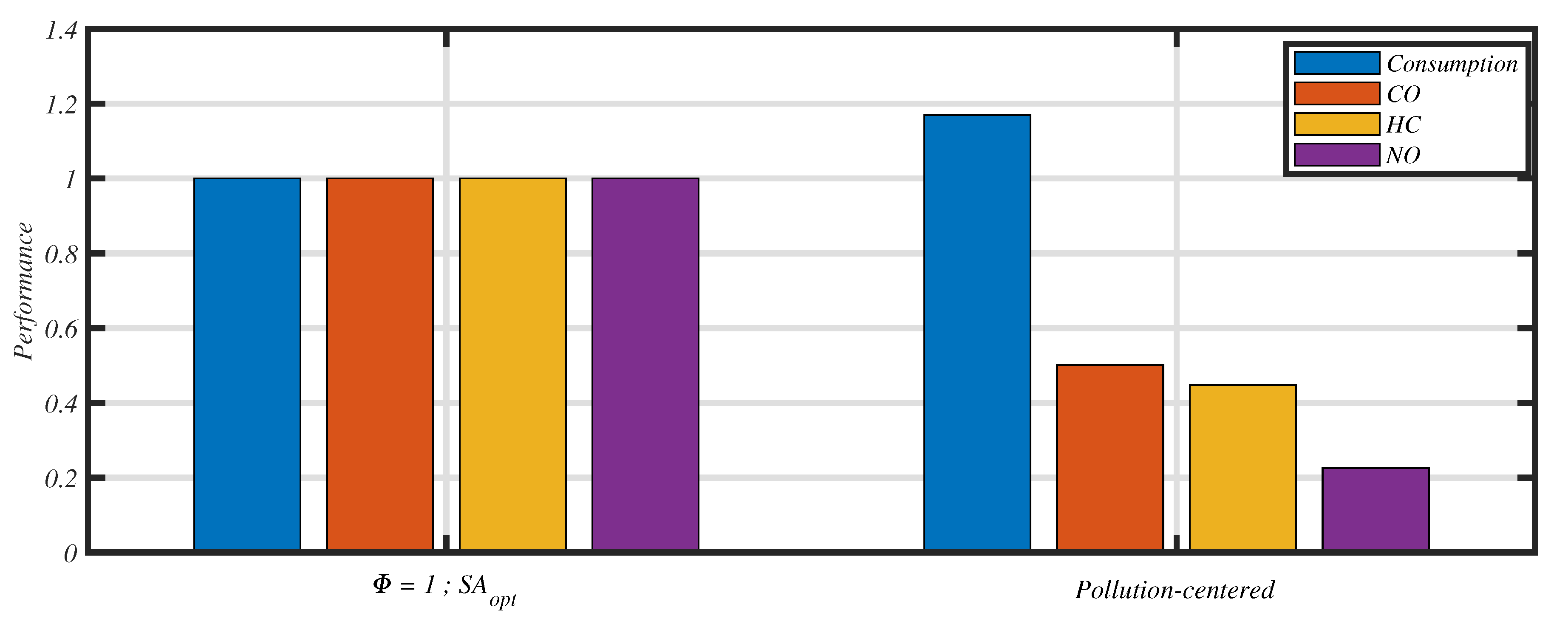
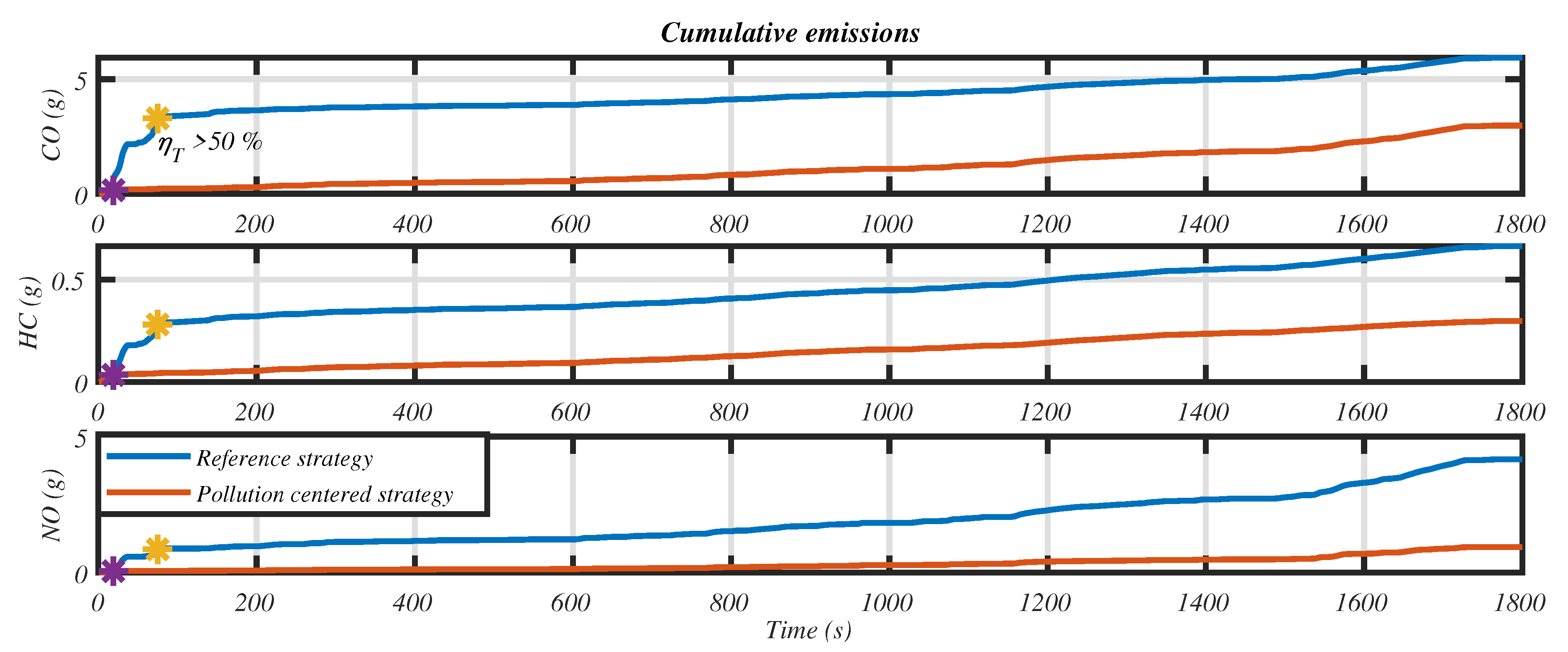
3.1. Pollution Centered Scenario
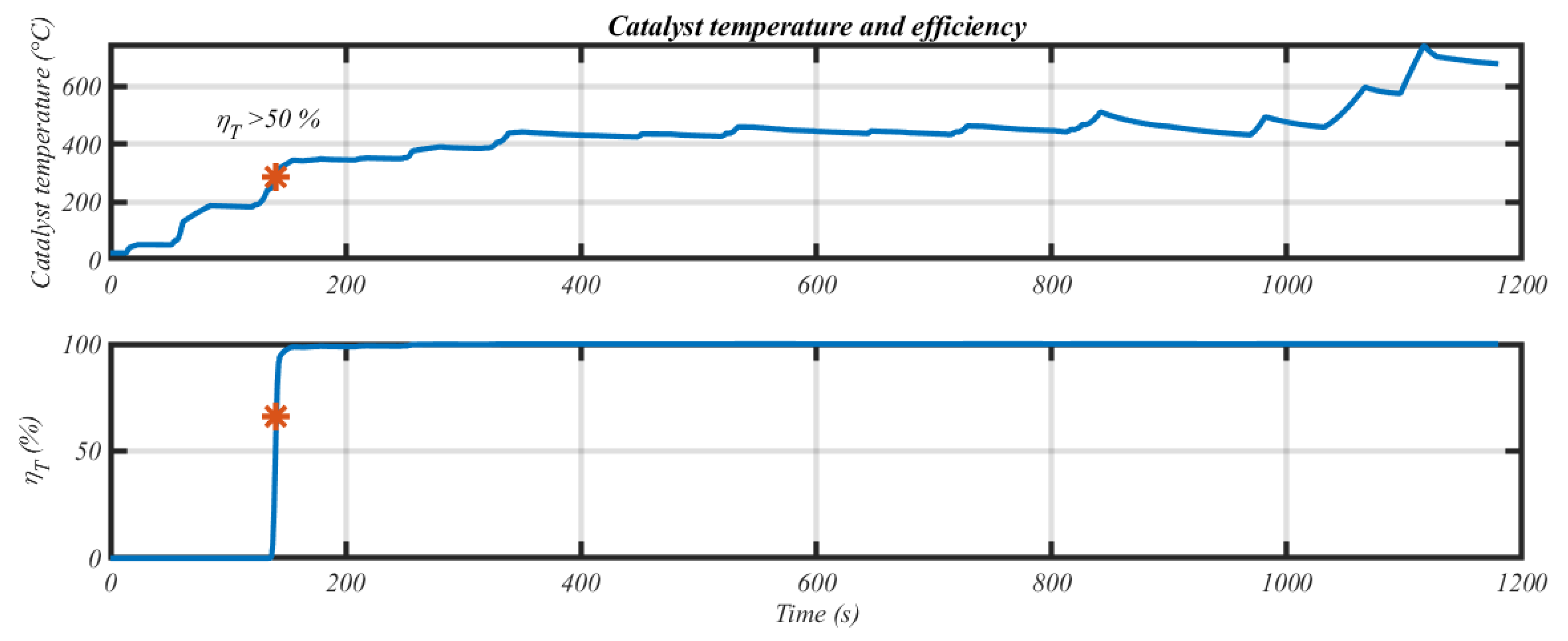
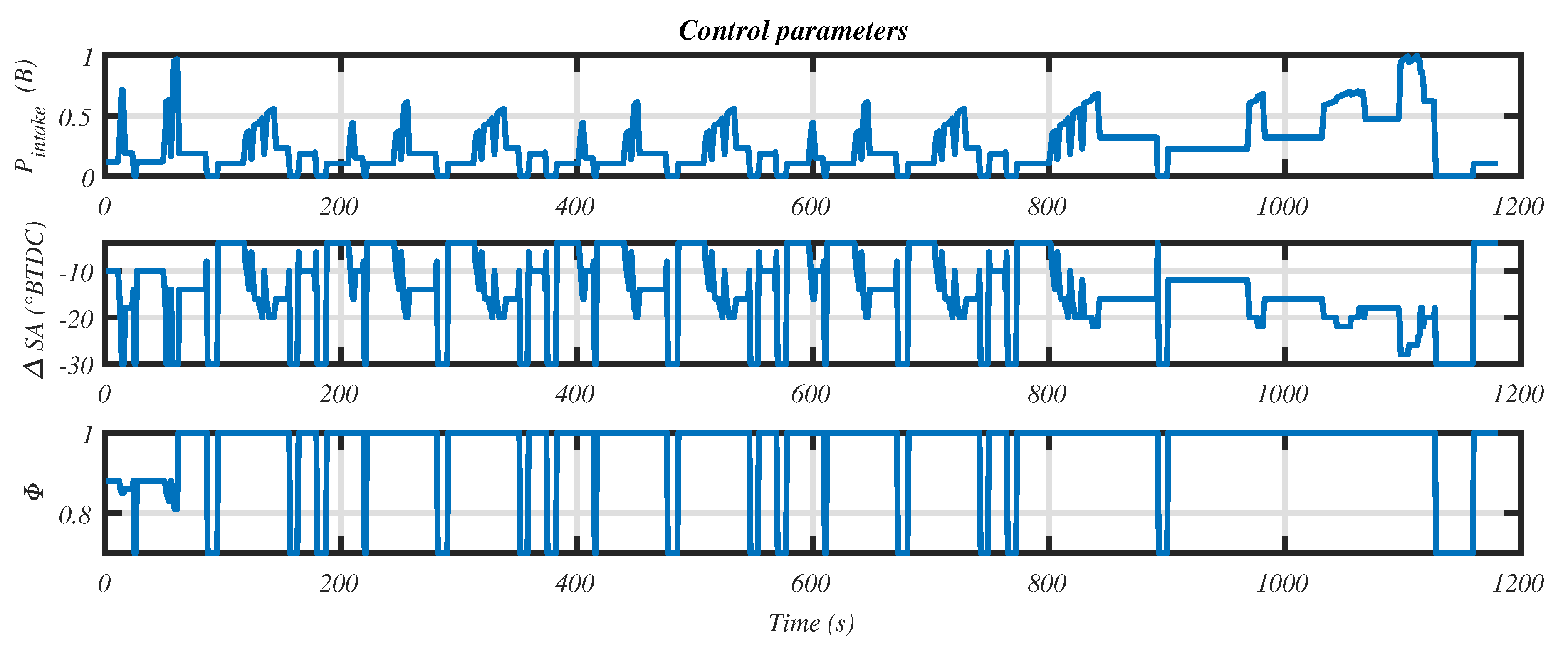
- Catalyst light-off: during this period, we observe a late spark advance (10 to 15° compared to optimal ignition). This is combined with a lean mixture, . These two parameters increase the exhaust gas temperature. For constant engine torque, the reduced fuel conversion efficiency associated with late combustion requires greater fuel and air flow rate (see intake pressure in Figure 26). As a consequence, exhaust enthalpy and convective effects are high. This shortens the period where catalyst efficiency is low.
- warm catalyst period: the strategy adopts a stoichiometric combustion which represents a good compromise to oxidize CO and HC while reducing NOx. In the same time, we observe a relative delay in spark advance to lower exhaust gas temperature and reduce NO (and HC to a lesser extent) formation. The emission of CO depends only on the fuel/air ratio (see Equation (1)) of the mixture, and stoechiometry is a good compromise for this pollutant. This delay increases with the brake power as it can be seen in the extra urban part of the NEDC cycle, again to lower NO emissions.
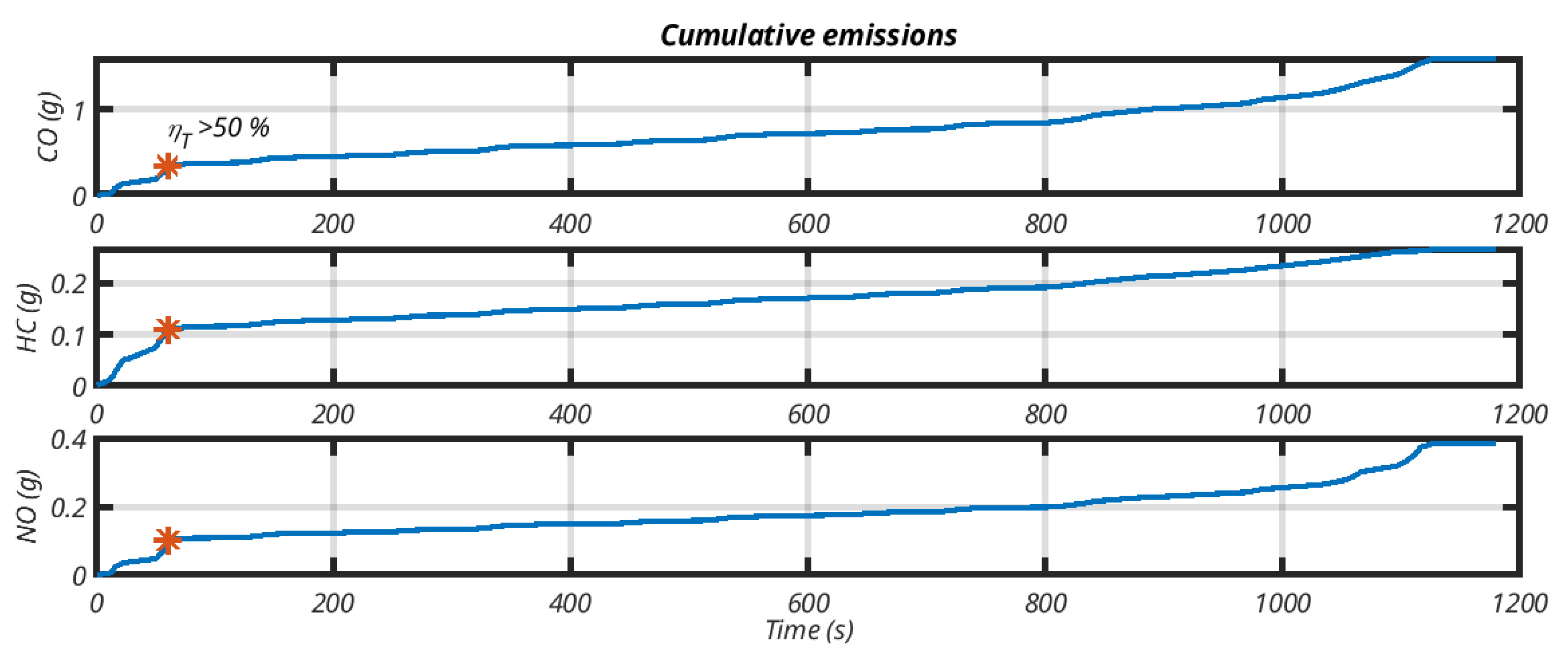
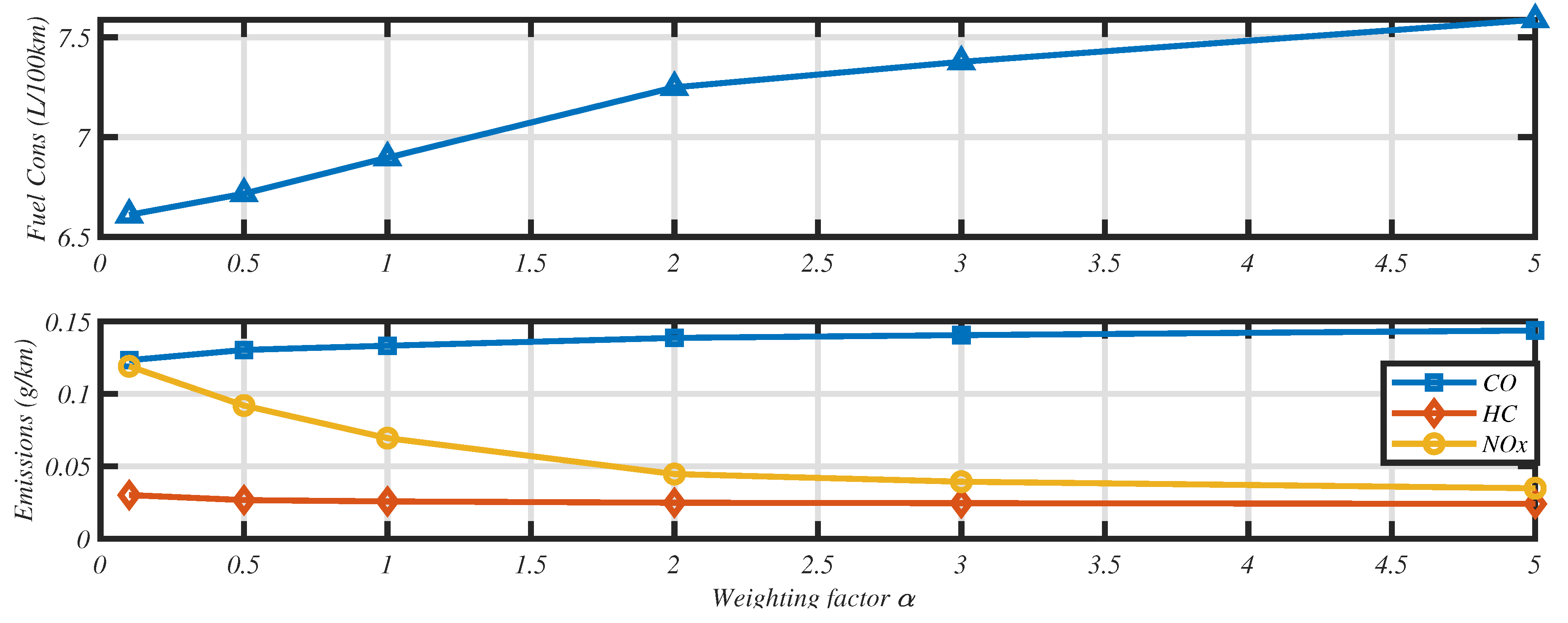
3.2. Trade-off between Fuel Consumption and Pollutant Emissions
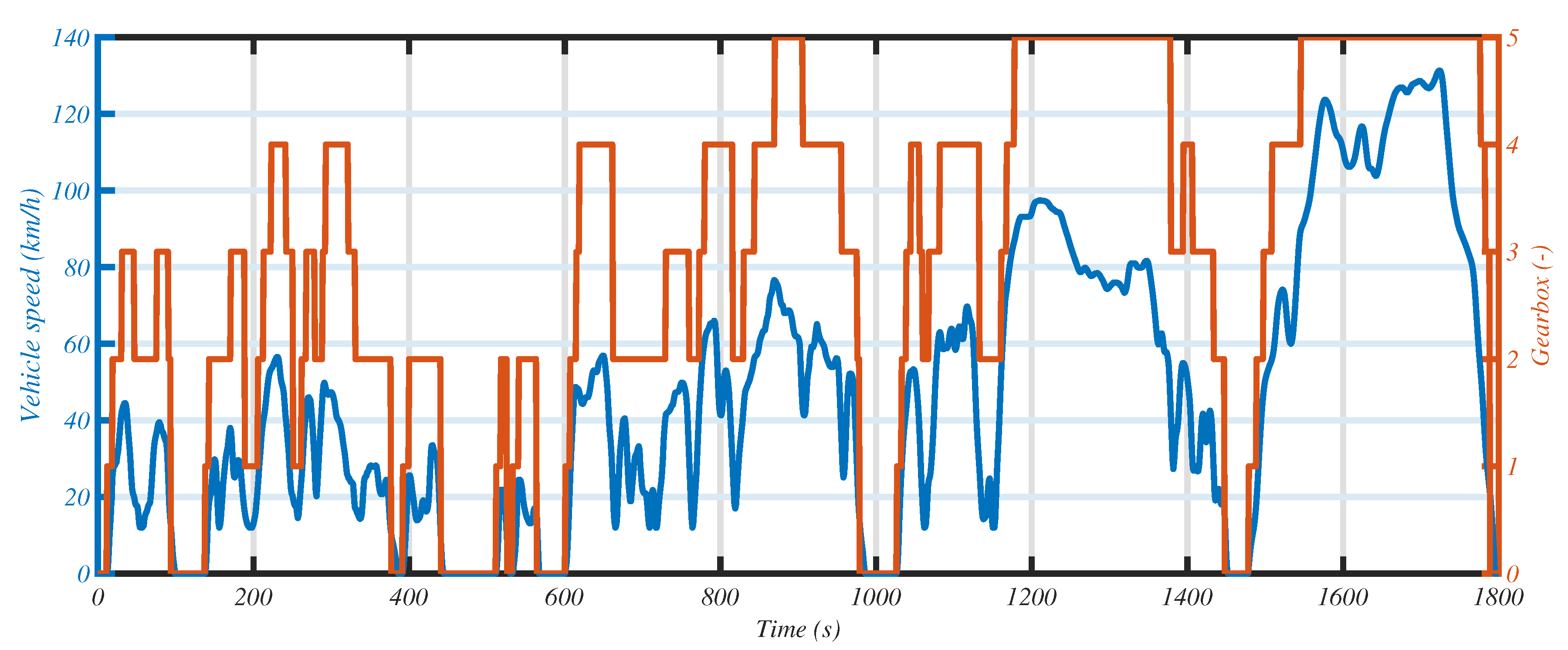
3.3. Worldwide Harmonized Light-Duty Vehicles Test Cycle
4. Discussion
4.1. Originality of the Work
- defining the maps to be used by real time control strategies for both hot and cold catalyst
- serving as reference values for comparison with online methods
4.2. Discussion of the Method
4.3. Challenges and Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Acronyms and chemical components | |
| BTDC | Before Top Dead Center |
| CAD | Crank Angle Degree |
| CFD | computational fluid dynamics |
| CO | carbon monoxide |
| HC | unburned hydrocarbons |
| ICE | internal combustion engine |
| NEDC | New European Driving Cycle |
| NO | nitrogen oxide |
| NOx | nitrogen oxides |
| TWC | three way catalyst |
| WLTC | Worldwide harmonized Light-duty vehicles Test Cycle |
| Symbols used in the equations | |
| CO concentration in ppm | |
| HC concentration in ppm | |
| nitrogen equilibrium concentration | |
| NO concentration in ppm | |
| saturation value for [NO] model | |
| oxygen equilibrium concentration | |
| weighting factor expressing the relative influence of consumption versus emissions | |
| discretization step for catalyst temperature (state variable) in K | |
| variation of catalyst temperature over a step time in K | |
| adjusting parameter (effect of spark advance on exhaust temperature) | |
| relative spark advance in CAD BTDC | |
| discretization step for the time in s | |
| thermal flux of catalyst with ambient in W | |
| thermal flux of catalyst with exhaust gas in W | |
| thermal flux of catalyst corresponding to chemical reaction in W | |
| fuel/air eq ration’s contribution to engine efficiency | |
| reference combustion efficiency | |
| combustion efficiency | |
| differential efficiency | |
| indicated fuel efficiency | |
| gear box efficiency | |
| spark advance’s contribution to engine efficiency | |
| Equivalence ratio’s contribution to volumetric efficiency | |
| volumetric efficiency of the engine | |
| friction torque in N·m | |
| brake torque of internal combustion engine in N·m | |
| Wheel torque in N·m | |
| engine speed in rad·s−1 | |
| idle speed in rad·s−1 | |
| fuel/air equivalence ratio | |
| air density in kg·m−3 | |
| adjusting parameter (effect of fuel/air eq ratio on exhaust temperature) | |
| adjusting parameter (effect of engine speed on exhaust temperature) | |
| adjusting parameter (effect of intake pressure on exhaust temperature) | |
| adjusting parameter (effect of spark advance on exhaust temperature) | |
| adjusting parameter (effect of fuel/air eq ratio on exhaust temperature) | |
| adjusting parameter (effect of engine speed on exhaust temperature)) | |
| adjusting parameter (effect of intake pressure on exhaust temperature) | |
| adjusting parameter (effect of spark advance on exhaust temperature) | |
| thermal capacity of exhaust gas in J·K−1·kg−1 | |
| thermal capacity of the catalyst in J·K−1·kg−1 | |
| drag coefficient | |
| Adjusting parameters for the [CO] model | |
| rolling resistance force in N | |
| g | acceleration of gravity in m·s−2 |
| adjusting parameters for the [HC] model | |
| Engine inertia in kg·m2 | |
| vehicle inertia in kg·m2 | |
| Inertia of a wheel in kg·m2 | |
| differential gear ratio | |
| gear box ratio | |
| effect of engine speed on exhaust temperature | |
| effect of fuel/air eq. ratio on exhaust temperature | |
| effect of intake pressure on exhaust temperaturet | |
| rolling coefficient | |
| effect of spark advance on exhaust temperature | |
| low heating value of the fuel in | |
| catalyst mass in kg | |
| average fuel mass flow of the reference vehicle running the NEDC test cycle in g·s-1 | |
| fuel mass flow in g·s−1 | |
| vehicle mass in kg | |
| average mass flow of pollutant species X on the NEDC test cycle in g·s−1 | |
| mass flow of each pollutant X in g·s−1 | |
| N | engine speed in rpm |
| adjusting parameters for the [NO] model | |
| intake manifold pressure in bar | |
| number of revolutions per combustion cycle (2 for four stroke engine) | |
| perfect gas constant in J·mol−1·K−1 | |
| tire radius in m | |
| frontal area of the vehicle en m2 | |
| spark Advance (CAD BTDC) | |
| optimal spark advance (maximum torque) in CAD BTDC | |
| T | temperature of the gas in K |
| t | time in s |
| ambiant temperature in K | |
| exhaust temperature in K | |
| intake temperature in K | |
| v | vehicle speed in m·s−1 |
| displacement volume in liter | |
| air to fuel ratio at stoichiometry | |
Appendix A. Model Parameters
Appendix A.1. Engine Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 164.073 | −0.0866 | 4.666 | |||
| 0.00217 | 4976 | −73.687 | |||
| 5.864 | 105.7 | ||||
| −0.1995 | −2669 | ||||
| 480.4 | 300 |
| N (rpm) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 500 | 750 | 1000 | 1500 | 2000 | 2500 | 3000 | 3500 | 3750 | 4000 | 4500 | 5000 | 5500 | 6000 | ||
(mBar) | 200 | 29 | 30 | 33 | 36 | 38 | 40 | 40 | 40 | 44.1 | 40 | 40 | 40 | 40 | 40 |
| 300 | 30 | 30 | 30 | 33 | 36 | 40.1 | 40.1 | 38,1 | 42.1 | 40.1 | 40 | 40 | 40 | 40 | |
| 400 | 28 | 28 | 30 | 32 | 33.3 | 35.1 | 35.1 | 34.1 | 34.1 | 34.1 | 34 | 34 | 34 | 34 | |
| 500 | 22 | 25 | 28 | 30 | 31.1 | 33.1 | 31.1 | 29.1 | 32.1 | 31.1 | 31 | 31 | 31 | 31 | |
| 600 | 20 | 23 | 25 | 27 | 28.1 | 29.1 | 28.1 | 27.1 | 29.1 | 30.1 | 29 | 29 | 29 | 29 | |
| 700 | 19 | 20 | 20 | 21 | 23.1 | 27.1 | 28.1 | 26.1 | 26.1 | 26.1 | 26 | 26 | 26 | 26 | |
| 800 | 21 | 20 | 20 | 24 | 21.1 | 26.1 | 28.1 | 24.1 | 25.1 | 24.1 | 25 | 25 | 25 | 25 | |
| 900 | 20 | 22 | 20 | 22 | 21.1 | 24.1 | 24.1 | 24.1 | 24.1 | 24.1 | 24 | 24 | 24 | 24 | |
| 1000 | 20 | 20 | 20 | 17 | 19.1 | 21.1 | 21.1 | 20.1 | 23.1 | 24.1 | 21 | 21 | 21 | 29 | |
| 2 | 1.8 | ||
| 0.98 | 0.43 | ||
| A | 300 | 8.314 | |
| B | 2000 | 44,000 | |
| 5.507 · 10−5 | 14.7 | ||
| 0.311 | 20 | ||
| 1.2 · 103 | 1.468 · 10−4 | ||
| −0.771 | 0.251 | ||
| 1.503 | 0.00108 | ||
| 0.805 |
Appendix A.2. Vehicle Parameters
| 0.97 | 0.008 | ||
| 0.95 | 0.728 | ||
| 1.1841 | |||
| 4.7647 | 1 | ||
| [3.4545 1.8667 1.2903 0.9512 0.7447] | 1499.3 | ||
| 0.7 | |||
| 0.3069 | 78.53 |
References
- European Environment Agency. Emissions of Air Pollutants from Transport; Technical Report; European Environment Agency: København, Denmark, 2019.
- Crippa, M.; Oreggioni, G.; Guizzardi, D.; Muntean, M.; Schaaf, E.; Lo Vullo, E.; Solazzo, E.; Monforti-Ferrario, F.; Olivier, J.; Vignati, E. Fossil CO2 and GHG Emissions of All World Countries: 2019 Report; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar] [CrossRef]
- EU Commission Regulation. Framework Directive 2007/46/EC; Technical Report; European Union: Maastricht, The Netherlands, 2007.
- Castagné, M.; Bentolila, Y.; Chaudoye, F.; Hallé, A.; Nicolas, F.; Sinoquet, D. Comparison of Engine Calibration Methods Based on Design of Experiments (DoE). Oil Gas Sci. Technol. 2008, 63, 563–582. [Google Scholar] [CrossRef]
- Heywood, J.B. Internal Combustion Engine Fundamentals; McGraw-Hill Education: New York, NY, USA, 1988. [Google Scholar]
- Pandey, V.; Jeanneret, B.; Gillet, S.; Keromnes, A.; Le Moyne, L. A simplified thermal model for the three way catalytic converter. In Proceedings of the TAP 2016—21st International Transport and Air Pollution Conference, Lyon, France, 24–26 May 2016. [Google Scholar]
- Scordia, J.; Trigui, R.; Desbois-Renaudin, M.; Jeanneret, B.; Badin, F. Global Approach for Hybrid Vehicle Optimal Control. J. Asian Electr. Veh. 2009, 7, 1221–1230. [Google Scholar] [CrossRef]
- Vinot, E.; Scordia, J.; Trigui, R.; Jeanneret, B.; Badin, F. Model simulation, validation and case study of the 2004 THS of Toyota Prius. Int. J. Veh. Syst. Model. Test. 2008, 3, 139–167. [Google Scholar] [CrossRef]
- Lavoie, G.A.; Heywood, J.B.; Keck, J.C. Experimental and Theoretical Study of Nitric Oxide Formation in Internal Combustion Engines. Combust. Sci. Technol. 1970, 1, 313–326. [Google Scholar] [CrossRef]
- Kwon, H.; Choi, H.; Kim, J.; Min, K. Combustion and emission modelling of a direct-injection spark-ignition engine by combining flamelet models for premixed and diffusion flames. Combust. Theory Model. 2012, 16, 1089–1108. [Google Scholar] [CrossRef]
- Karvountzis-Kontakiotis, A.; Ntziachristos, L. Improvement of NO and CO predictions for a homogeneous combustion SI engine using a novel emissions model. Appl. Energy 2016, 162, 172–182. [Google Scholar] [CrossRef]
- Guzzella, L.; Onder, C.H. Introduction to Modeling and Control of Internal Combustion Engine Systems; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Abida, J.; Claude, D. Spark ignition engines and pollution emission: New approaches in modelling and control. Int. J. Veh. Des. 1994, 15, 494–508. [Google Scholar] [CrossRef]
- Sayin, C.; Ertunc, H.M.; Hosoz, M.; Kilicaslan, I.; Canakci, M. Performance and exhaust emissions of a gasoline engine using artificial neural network. Appl. Therm. Eng. 2007, 27, 46–54. [Google Scholar] [CrossRef]
- Nikzadfar, K.; Shamekhi, A.H. An extended mean value model (EMVM) for control-oriented modeling of diesel engines transient performance and emissions. Fuel 2015, 154, 275–292. [Google Scholar] [CrossRef]
- Andrianov, D.I.; Brear, M.J.; Manzie, C. A Physics-Based Integrated Model of a Spark Ignition Engine and a Three-Way Catalyst. Combust. Sci. Technol. 2012, 184, 1269–1301. [Google Scholar] [CrossRef]
- Shayler, P.J.; Chick, J.; Darnton, N.J.; Eade, D. Generic functions for fuel consumption and engine-out emissions of HC, CO and NOx of spark-ignition engines. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 1999, 213, 365–378. [Google Scholar] [CrossRef]
- Horrein, L.; Bouscayrol, A.; Delarue, P.; Verhille, J.; Mayet, C. Forward and Backward simulations of a power propulsion system. IFAC Proc. 2012, 45, 441–446. [Google Scholar] [CrossRef]
- Asus, Z.; Chrenko, D.; Aglzim, E.; Kéromnès, A.; Le Moyne, L. Simple method of estimating consumption of internal combustion engine for hybrid application. In Proceedings of the 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 18–20 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Guille des Buttes, A.; Jeanneret, B.; Kéromnès, A.; Le Moyne, L.; Pélissier, S. Energy management strategy to reduce pollutant emissions during the catalyst light-off of parallel hybrid vehicles. Appl. Energy 2020, 266, 114866. [Google Scholar] [CrossRef]
- Bowman, C.T. Kinetics of pollutant formation and destruction in combustion. Prog. Energy Combust. Sci. 1975, 1, 33–45. [Google Scholar] [CrossRef]
- Lakshminarayanan, P.A.; Aghav, Y.V. Hydrocarbon Emissions from Spark Ignition Engines. In Modelling Diesel Combustion; Springer Netherlands: Dordrecht, The Netherlands, 2010; pp. 147–166. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, X.; Qian, D.C. The effects of EGR and ignition timing on emissions of GDI engine. Sci. China Technol. Sci. 2013, 56, 3144–3150. [Google Scholar] [CrossRef]
- Kaiser, E.; Siegl, W.; Brehob, D.; Haghgooie, M. Engine-Out Emissions from a Direct-Injection Spark-Ignition (DISI) Engine. SAE Trans. 1999, 108, 1155–1165. [Google Scholar]
- Raine, R.; Stone, C.; Gould, J. Modeling of nitric oxide formation in spark ignition engines with a multizone burned gas. Combust. Flame 1995, 102, 241–255. [Google Scholar] [CrossRef]
- Fenimore, C. Formation of nitric oxide in premixed hydrocarbon flames. Symp. (Int.) Combust. 1971, 13, 373–380. [Google Scholar] [CrossRef]
- Raimbault, V. Benefit of Air Intake Optimization for New Turbocharged Gasoline Engine. Ph.D. Thesis, Ecole Centrale de Nantes (ECN), Nantes, France, 2019. [Google Scholar]
- Yang, C.S.; Park, Y.J.; Cho, Y.; Kim, D.S. Variation of Exhaust Gas Temperature with the Change of Spark Timing and Exhaust Valve Timing During Cold Start Operation of an SI Engine. Trans. Korean Soc. Mech. Eng. B 2005, 29, 384–389. [Google Scholar] [CrossRef]
- Bordjane, M. Modélisation et Caractérisation Dynamique des Circuits d’admission et d’échappement des Moteurs à Combustion Interne. Ph.D. Thesis, Université des Sciences et de la Technologie Mohamed Boudiaf d’Oran, Oran, Maroc, 2013. [Google Scholar]
- Malkhede, D.N.; Khalane, H. Maximizing Volumetric Efficiency of IC Engine through Intake Manifold Tuning. In SAE 2015 World Congress and Exhibition; SAE International: Detroit, MI, USA, 23 April 2015. [Google Scholar] [CrossRef]
- Borman, G.; Nishiwaki, K. Internal-combustion engine heat transfer. Prog. Energy Combust. Sci. 1987, 13, 1–46. [Google Scholar] [CrossRef]
- Liu, F.; Akram, M.Z.; Wu, H. Hydrogen effect on lean flammability limits and burning characteristics of an isooctane–air mixture. Fuel 2020, 266, 117144. [Google Scholar] [CrossRef]
- Lumsden, G. Characterizing Engine Emissions with Spark Efficiency Curves. In SAE Technical Paper; SAE International: Tampa, FL, USA, 2004. [Google Scholar] [CrossRef]
- Brandt, E.P.; Grizzle, J.W. Three-way catalyst diagnostics for advanced emissions control systems. In Proceedings of the 2001 American Control Conference. (Cat. No.01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 5, pp. 3305–3311. [Google Scholar] [CrossRef]
- Sanketi, P.R.; Hedrick, J.K.; Kaga, T. A simplified catalytic converter model for automotive coldstart control applications. In Proceedings of the ASME 2005 International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2005. [Google Scholar] [CrossRef]
- Tomforde, M.; Drewelow, W.; Duenow, P.; Lampe, B.; Schultalbers, M. A Post-Catalyst Control Strategy Based on Oxygen Storage Dynamics. In Proceedings of the SAE 2013 World Congress & Exhibition, Detroit, MI, USA, 16–18 April 2013. [Google Scholar] [CrossRef]
- Shaw, B.T.; Fisher, G.D.; Hedrick, J.K. A simplified coldstart catalyst thermal model to reduce hydrocarbon emissions. IFAC 2002, 35, 307–312. [Google Scholar] [CrossRef]
- Mozaffari, A.; Azad, N.L.; Hedrick, J.K. A Nonlinear Model Predictive Controller With Multiagent Online Optimizer for Automotive Cold-Start Hydrocarbon Emission Reduction. IEEE Trans. Veh. Technol. 2016, 65, 4548–4563. [Google Scholar] [CrossRef]
- Yildiz, Y.; Annaswamy, A.M.; Yanakiev, D.; Kolmanovsky, I. Spark ignition engine fuel-to-air ratio control: An adaptative control approach. Control. Eng. Pract. 2010, 18, 1369–1378. [Google Scholar] [CrossRef]
- Ye, Z.; Mohamadian, H. Model predictive control on wall wetting effect using Markov Chain Monte Carlo. In Proceedings of the 2013 IEEE Latin-America Conference on Communications, Santiago, Chile, 24–26 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Muske, R.; Peyton-Jones, C. Estimating the oxygen storage level of a three way automotive catalyst. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 35, pp. 4060–4065. [Google Scholar] [CrossRef]
- Joud, L.; Da Silva, R.; Chrenko, D.; Kéromnès, A.; Le Moyne, L. Smart Energy Management for Series Hybrid Electric Vehicles Based on Driver Habits Recognition and Prediction. Energies 2020, 13, 2954. [Google Scholar] [CrossRef]






























| Intake manifold pressure (bar) | 0.3 0.5 0.7 0.9 1 |
| Engine speed (rpm) | 800 1000 1500 2000 3000 4000 |
| fuel/air eq. ratio (-) | 0.7 0.8 0.85 0.9 0.95 1 1.1 1.2 |
| Spark Advance (°BTDC) | −10: 5: 50 |
| Variable | Steps | Min. Value | Max. Value |
|---|---|---|---|
| catalyst temperature | 0.1 K | not bounded | |
| Fuel/air eq. ratio | 0.01 | 0.7 | 1.1 |
| Relative spark advance | 2° | −30° | 10° |
| Step time | 1 s | NA | |
| Component | Size | Type of Model |
|---|---|---|
| Internal combustion engine | 1.8 L | Mean Value Engine Model |
| Three way catalytic converter | EURO 6 compliant | 0D model |
| Chassis (Peugeot 308 SW-2009) | 1470 kg | longitudinal forces |
| Ref. Strategy | Relative Variation | ||
|---|---|---|---|
| Consumption (L/100 km) | 6.57 | 7.59 | +15% |
| CO (g/km) | 0.53 | 0.144 | −73% |
| HC (g/km) | 0.056 | 0.024 | −57% |
| NO (g/km) | 0.212 | 0.035 | −84% |
| Ref. Strategy | Relative Variation | ||
|---|---|---|---|
| Consumption (L/100 km) | 6.86 | 8.02 | +17% |
| CO (g/km) | 0.2554 | 0.128 | −50% |
| HC (g/km) | 0.029 | 0.013 | −55% |
| NO (g/km) | 0.179 | 0.040 | −77% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeanneret, B.; Guille Des Buttes, A.; Pelluet, J.; Keromnes, A.; Pélissier, S.; Le Moyne, L. Optimal Control of a Spark Ignition Engine Including Cold Start Operations for Consumption/Emissions Compromises. Appl. Sci. 2021, 11, 971. https://doi.org/10.3390/app11030971
Jeanneret B, Guille Des Buttes A, Pelluet J, Keromnes A, Pélissier S, Le Moyne L. Optimal Control of a Spark Ignition Engine Including Cold Start Operations for Consumption/Emissions Compromises. Applied Sciences. 2021; 11(3):971. https://doi.org/10.3390/app11030971
Chicago/Turabian StyleJeanneret, Bruno, Alice Guille Des Buttes, Jérémy Pelluet, Alan Keromnes, Serge Pélissier, and Luis Le Moyne. 2021. "Optimal Control of a Spark Ignition Engine Including Cold Start Operations for Consumption/Emissions Compromises" Applied Sciences 11, no. 3: 971. https://doi.org/10.3390/app11030971
APA StyleJeanneret, B., Guille Des Buttes, A., Pelluet, J., Keromnes, A., Pélissier, S., & Le Moyne, L. (2021). Optimal Control of a Spark Ignition Engine Including Cold Start Operations for Consumption/Emissions Compromises. Applied Sciences, 11(3), 971. https://doi.org/10.3390/app11030971