Simulation of Scalability in Cloud-Based IoT Reactive Systems Leveraged on a WSAN Simulator and Cloud Computing Technologies †



Abstract
:1. Introduction
- Model of a wireless sensor network as part of a simple IoT application to monitor and control constantly the parks of a city.
- Model of a wireless sensor network as part of an IoT application that provides service to users with an M/M/c/N queuing system.
- Model of infrastructure for the support of reactive web services in the cloud platform to simulate IoT applications.
2. Related Works
3. The Modeling and Simulation Architecture
3.1. Work Environments
3.2. Ptolemy II Modeling Tool: Building WSAN Models
3.3. Component Infrastructure in the Cloud Platform
3.4. Microservices Modeling with Akka FSM
3.5. Security
4. Modeling an IoT System to Monitor and Control the Parks of a City
5. Building IoT Parking Lots Reactive System Model
5.1. Scope and Context
5.2. Reservation System General Model
- Stateless basic services for the management of system data such as user data and parking lot data.
- A stateful service for the maintenance of the state of the system (number of parking spaces available) and reservation allocation. This service contains the operational components for synchronization with the WSAN and the recovery of the state of the parking spaces. These operational components are useful during startup or restart of the web application due to possible service interruptions.
- A stateless service for reservation request that provides the user with the QR code of the reservation.
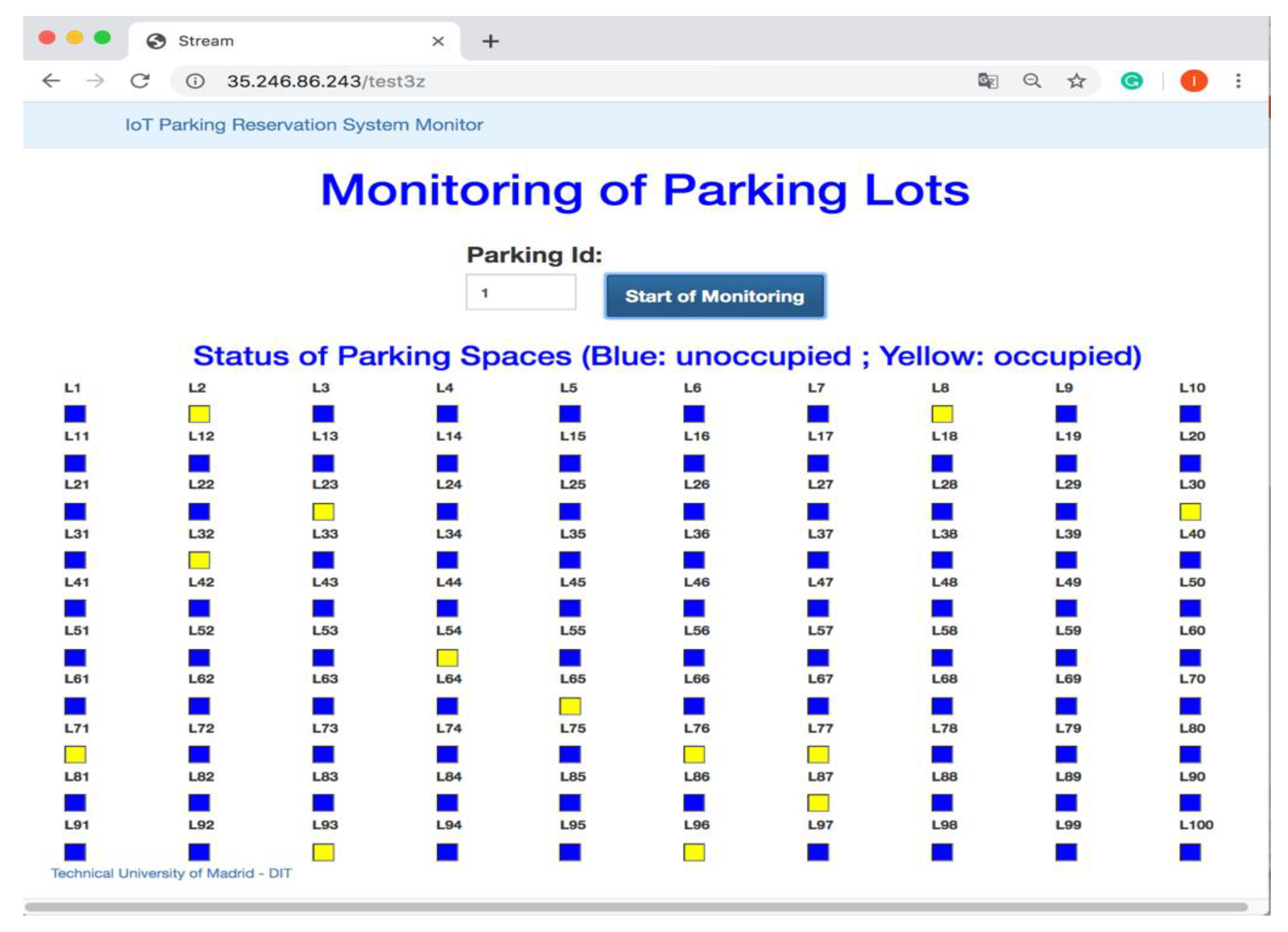
- A stateless service to monitor the status of parking spaces in real time.
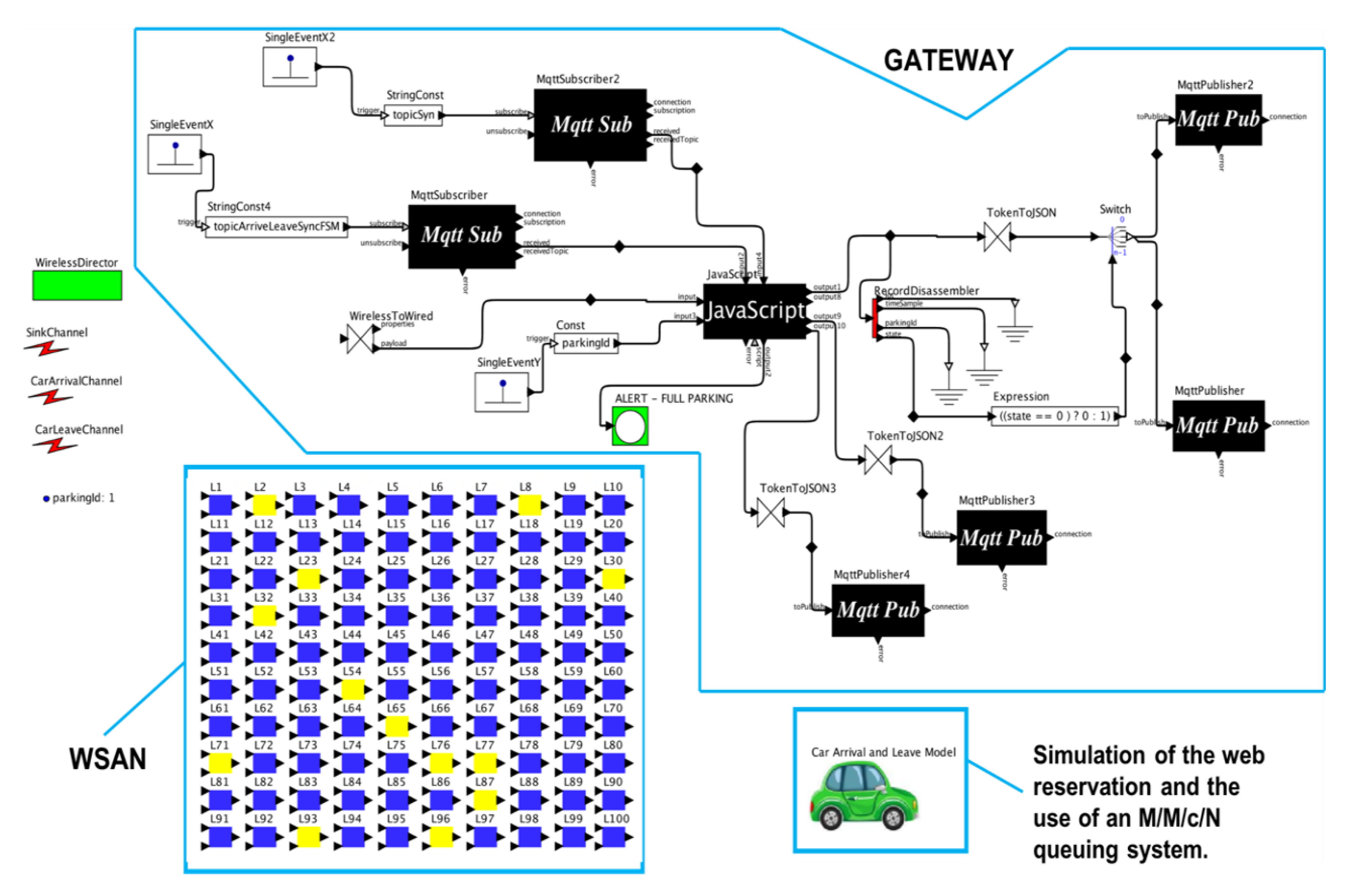
5.3. Developing an IoT Parking Lot Model Based on a WSAN
5.4. Developing Vehicle Arrival/Departure Submodel
- Synchronization by monitoring (“topicSyncManualScreen” and “topicSyncManualScreenData”), and
- Synchronization due to web server failure (“topicSyncStartFSM” and “topicSyncStartFSMData”)
5.5. Developing the Microservices Model for the IoT Parking Lot System
- The MVC pattern is the model–view–controller design pattern that helps implement microservices made up of visual interfaces.
- The message pattern is useful for implementing services that contain communication functionalities with message brokers.
- The Akka FSM actor pattern was used to implement services whose functionality could be expressed as a set of interrelated states in concurrency.
5.5.1. Stateless Services
Basic Services and the Reservation Request Service
The Monitoring Service and the Synchronization Algorithm
- The monitoring web service sends a synchronization request message to the confluent (Kafka)
- The Gateway receives the synchronization request message from the MQTT broker.
- The Gateway sends the synchronization data to the MQTT broker.
- The monitoring service collects the synchronization data from the confluent (Kafka).
- The service shows the states of each of the parking spaces on the dashboard.
5.5.2. Service Stateful Service: Reservation Allocation Service
- The service model consists of the following parts:
- The states: S1 (WaitingParkingRequest), S2 (ProcessParkingRequest), S3 (CarDepartureParking-Process Kafka Message), and S4 (Common Code). S4 was used to manage the common state code as a generic event control.
- The events: E1 (ParkingRequest), E2 (PendingRequest), E3 (CarDepartureParking), E4 (Done1), and E5 (Executed2).
- Transitions: T: 1-2, T: 1-3, T: 2-1, T: 3-1
6. Results and Discussions
6.1. Simulation of the Monitoring and Control of the Parks of a City
6.1.1. Simulation Set-Up
- macOS Sierra version 10.12.3, 2 GHz Intel Core i5, 8GB of memory;
- Ptolemy II 10.0 and VisualSense;
- EMQTTD Erlang MQTT Broker 1.0;
- JRE: 1.8.0_112-release-408-b6 x86_64, JVM: Open JDK 64-Bit Server VM;
- Docker Machine 0.12.2.
6.1.2. Sensitivity of the Model Parameters of the Park Monitoring System
The Effect of the Number of Sensors
The Effect of the Sampling Period Used by the Sensors
6.1.3. Experiment 1
6.1.4. Experiment 2
6.1.5. Experiment 3
6.1.6. Experiment 4
6.1.7. Message Broker, Data Monitor, and Files.xml
6.2. Simulation of the Monitoring and Control of Parking Lots in the North of a City
6.2.1. Simulation Set-Up
6.2.2. Computerized M/M/c/N Submodel Verification
6.2.3. Sensitivity of the M/M/c/N Submodel Parameters
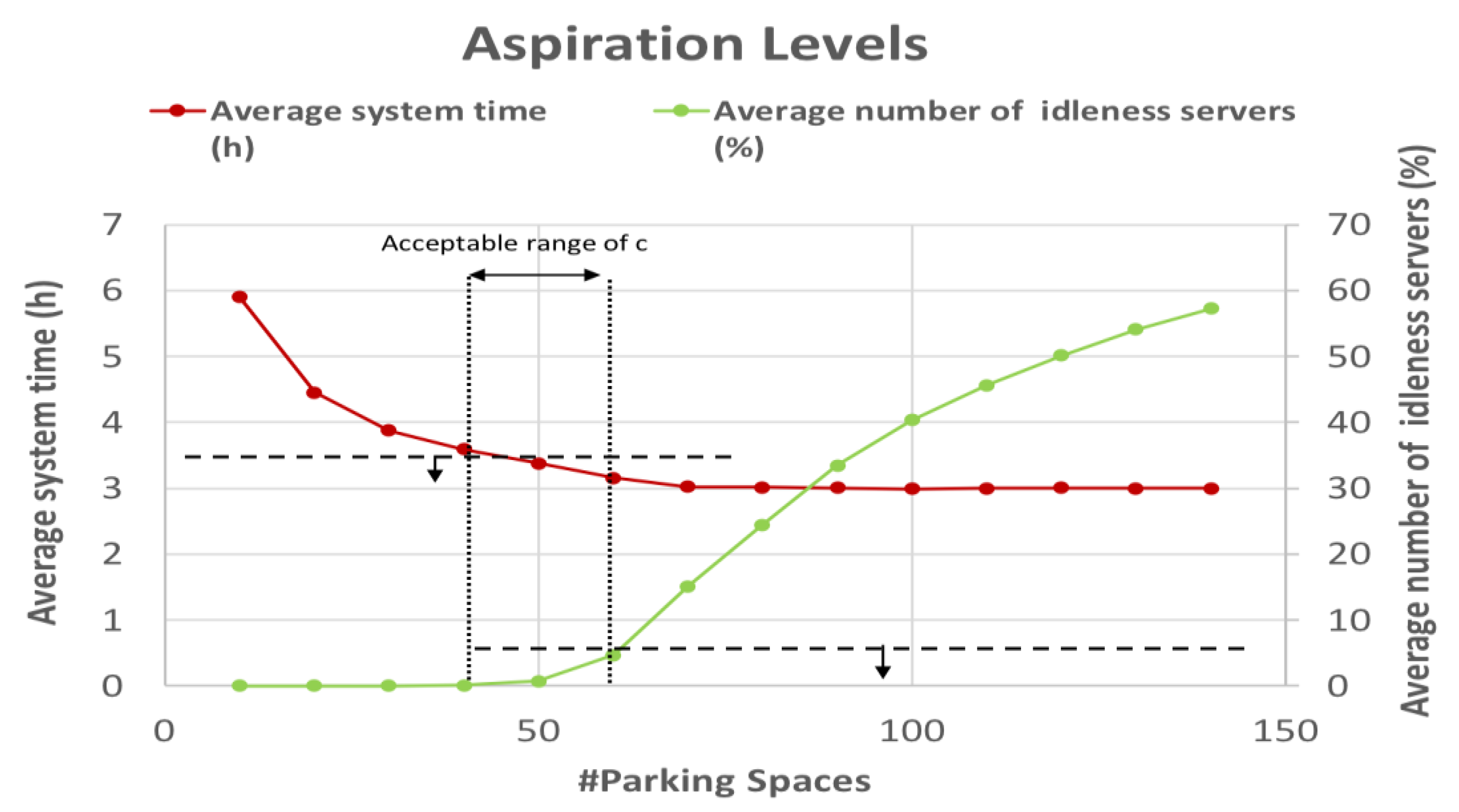
6.2.4. Selecting the Level of Service in a Parking Lot System
6.2.5. Context: Simulation of the Service Operation Time of the Parking Lots in the North of a City
6.2.6. Context III: Simulation of Parking Lots in the North of a City in Real Time
6.2.7. Model Performance of the Reservation Request Service and System’s Recovery Time in Case of Failures
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Da Costa, F. Rethinking the Internet of Things: A Scalable Approach to Connecting Everything; Apress: Berkeley, CA, USA, 2013. [Google Scholar]
- Ptolemy II Home Page. Available online: http://ptolemy.eecs.berkeley.edu/ptolemyII/ (accessed on 31 January 2021).
- Singh, S.; Singh, N. Internet of Things (IoT): Security challenges, business opportunities & reference architecture for E-commerce. In Proceedings of the 2015 International Conference on Green Computing and Internet of Things (ICGCIoT 2015), Delhi, India, 8–10 October 2015; pp. 1577–1581. [Google Scholar] [CrossRef]
- Chernyshev, M.; Baig, Z.; Bello, O.; Zeadally, S. Internet of Things (IoT): Research, Simulators, and Testbeds. IEEE Internet Things J. 2018, 5, 1637–1647. [Google Scholar] [CrossRef]
- Sargent, R.G. Verification and validation of simulation models. J. Simul. 2013, 17, 12–24. [Google Scholar] [CrossRef] [Green Version]
- Law, A.M. Simulation Modeling and Analysis, 5th ed.; McGraw-Hill: New York, NY, USA, 2014. [Google Scholar]
- Shah, J.; Dubaria, D. Building Modern Clouds: Using Docker, Kubernetes & Google Cloud Platform. In Proceedings of the 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 7–9 January 2019; pp. 184–189. [Google Scholar] [CrossRef]
- Reactive Manifesto. Available online: http://www.reactivemanifesto.org (accessed on 31 January 2021).
- Jurado Perez, L.; Salvachua Rodriguez, J. Simulation of scalability in IoT applications. In Proceedings of the 2018 International Conference on Information Networking (ICOIN 2018), Chiang Mai, Thailand, 10–12 January 2018; pp. 577–582. [Google Scholar] [CrossRef]
- Han, S.N.; Lee, G.M.; Crespi, N.; Heo, K.; Van Luong, N.; Brut, M.; Gatellier, P. DPWSim: A simulation toolkit for IoT applications using devices profile for web services. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 544–547. [Google Scholar] [CrossRef]
- Gupta, H.; Dastjerdi, A.V.; Ghosh, S.K.; Buyya, R. iFogSim: A toolkit for modeling and simulation of resource management techniques in the Internet of Things, Edge and Fog computing environments. Softw. Pr. Exp. 2017, 47, 1275–1296. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Garg, S.K.; Strazdins, P.E.; Jayaraman, P.P.; Georgakopoulos, D.; Ranjan, R. IOTSim: A Cloud based Simulator for Analysing IoT Applications. J. Syst. Archit. 2017, 72, 93–107. [Google Scholar] [CrossRef]
- Sotiriadis, S.; Bessis, N.; Asimakopoulou, E.; Mustafee, N. Towards Simulating the Internet of Things. In Proceedings of the 2014 28th International Conference on Advanced Information Networking and Applications Workshops, Victoria, BC, Canada, 13–16 May 2014; pp. 444–448. [Google Scholar] [CrossRef] [Green Version]
- Varga, A.; Hornig, R. An overview of the OMNeT++ simulation environment. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, SimuTools 2008, Marseille, France, 3–7 March 2008. [Google Scholar] [CrossRef]
- Riley, G.F.; Henderson, T.R. The ns-3 Network Simulator. In Proceedings of the SIGCOMM’08, Seattle, WA, USA, 17–22 August 2008. [Google Scholar]
- Lord, M.; Memmi, D. NetSim: A Simulation and Visualization Software for Information Network Modeling. In Proceedings of the 2008 International MCETECH Conference on e-Technologies (MCETECH 2008), Montreal, QC, Canada, 23–25 January 2008; pp. 167–177. [Google Scholar] [CrossRef]
- QualNet—Network Simulation Software. Available online: https://www.scalable-networks.com/products/qualnet-network-simulation-software-tool/ (accessed on 31 January 2021).
- Ronit, L.; Maharshi, J.; Amit, J. Survey on Network Simulators. Int. J. Comput. Appl. 2018, 182, 23–30. [Google Scholar]
- Gandomi, A.; Tafti, V.A.; Ghasemzadeh, H. Wireless Sensor Networks Modeling and Simulation in Visualsense. In Proceedings of the 2010 Second International Conference on Computer Research and Development, Kuala Lumpur, Malaysia, 7–10 May 2010; pp. 251–254. [Google Scholar] [CrossRef]
- VisualSense. Visual Editor and Simulator for Wireless Sensor Network Systems. Available online: https://ptolemy.eecs.berkeley.edu/visualsense/ (accessed on 31 January 2021).
- Lee, E.A. Accessors: A Software Architecture for IoT. Talk or Presentation. 30 March 2017. Available online: https://ptolemy.berkeley.edu/projects/icyphy/pubs/73.html (accessed on 31 January 2021).
- What Is Kubernetes?—Kubernetes. Available online: https://kubernetes.io/docs/concepts/overview/what-is-kubernetes/ (accessed on 31 January 2021).
- What Is a Container?—App Containerization—Docker. Available online: https://www.docker.com/resources/what-container (accessed on 31 January 2021).
- Romualdo Suzuki, L. Smart Cities IoT: Enablers and Technology Road Map. In Smart City Networks: Through the Internet of Things; Russia, S., Pardalos, P., Eds.; Springer Optimization and Its Applications; Springer: Cham, Switzerland, 2017; Volume 125, pp. 167–190. [Google Scholar] [CrossRef]
- EMQ—The Massively Scalable Open Source MQTT Broker. Available online: http://emqtt.io/ (accessed on 31 January 2021).
- Docker Hub. Public Image: EMQTT. Available online: https://hub.docker.com/ (accessed on 31 January 2021).
- Apache Kafka. Available online: https://kafka.apache.org/intro (accessed on 31 January 2021).
- The Most Popular Database for Modern Apps. Available online: https://www.mongodb.com/ (accessed on 31 January 2021).
- Eisele, M. Developing Reactive Microservices: Enterprise Implementation in Java; O’Reilly Media Inc.: Boston, MA, USA, 2016. [Google Scholar]
- Wolff, E. Microservices: Flexible Software Architecture; Addison-Wesley Professional: Boston, MA, USA, 2016. [Google Scholar]
- Classic FSM—Akka Documentation. Available online: https://doc.akka.io/docs/akka/current/fsm.html (accessed on 31 January 2021).
- EMQ 2.2—Erlang MQTT Broker: User Guide. Available online: https://emq-docs-en.readthedocs.io/en/latest/guide.html (accessed on 31 January 2021).
- Confluent: Security. Available online: https://docs.confluent.io/platform/current/security/security_tutorial.html (accessed on 31 January 2021).
- MongoDB Documentation: Security. Available online: https://docs.mongodb.com/manual/security/ (accessed on 31 January 2021).
- Google Cloud: Google Infrastructure Security Design Overview. Available online: https://cloud.google.com/security/infrastructure/design/ (accessed on 31 January 2021).
- Kubernetes: Overview of Cloud Native Security. Available online: https://kubernetes.io/docs/concepts/security/overview/ (accessed on 31 January 2021).
- Confluent: Apache Kafka & Event Streaming Platform for the Enterprise. Available online: https://www.confluent.io/ (accessed on 31 January 2021).
- Apache JMeter. Available online: https://jmeter.apache.org/ (accessed on 31 January 2021).
- Taha, H.A. Operations Research: An Introduction, 10th ed.; Pearson: New York, NY, USA, 2017. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulator | Ref. | Category | Language | Modelling IoT Nodes | Cloud Layer | Application Layer |
|---|---|---|---|---|---|---|
| DPWSim | [10] | Full Stack Simulator | Java | N | N | Y |
| iFogSim | [11] | Full Stack Simulator | Java | N | Y | Y |
| IOTSim | [12] | Big Data Processing | Java | N | Y | Y |
| SimIoT | [13] | Big Data Processing | Java | N | Y | Y |
| OMNeT++ | [14] | Network Simulator | C++, Java, C# | Y | N | N |
| ns-3 | [15] | Network Simulator | C++, Python | Y | N | N |
| NetSim | [16] | Network Simulator | Java | Y | N | N |
| QualNet | [17] | Network Simulator | C/C++ | Y | N | N |
| Our hybrid solution | [This] | An approach to Full Stack simulator | Java, JavaScipt, Scala & HTML5 | Y | Y | Y |
| Microservices | Patterns |
|---|---|
| User Data Service | MVC |
| Parking Lot Data Service | MVC |
| Reservation Request Service | MVC |
| Monitoring Service | MVC Messaging (Publish/Subscribe) |
| Reservation Allocation Service | Akka FSM Actor Messaging (Publish/Subscribe) |
| nmsg | |||||
|---|---|---|---|---|---|
| p = 1 | p = 2 | p = 3 | p = 4 | p = 5 | |
| ns = 2 | 604 | 1208 | 1812 | 2416 | 3020 |
| ns = 4 | 1208 | 2416 | 3624 | 4832 | 6040 |
| ns = 6 | 1812 | 3624 | 5436 | 7248 | 9060 |
| ns = 8 | 2416 | 4832 | 7248 | 9664 | 12,080 |
| ns = 10 | 3020 | 6040 | 9060 | 12,080 | 15,100 |
| nmsg | |||||
|---|---|---|---|---|---|
| p = 1 | p = 2 | p = 3 | p = 4 | p = 5 | |
| sp = 0.94 | 1812 | 3624 | 5436 | 7248 | 9060 |
| sp = 1.88 | 936 | 1872 | 2808 | 3744 | 4680 |
| sp = 3 | 594 | 1188 | 1782 | 2376 | 2970 |
| sp = 5 | 366 | 732 | 1098 | 1464 | 1830 |
| sp = 7 | 264 | 528 | 792 | 1056 | 1320 |
| Execution Number | Number of Messages per Sensor (n) | Total Number of Messages Sent to Broker | Average of Execution Time (min) |
|---|---|---|---|
| 1 | 50 | 550 | 8.29 |
| 2 | 100 | 1100 | 16.70 |
| 3 | 150 | 1650 | 25.18 |
| 4 | 200 | 2200 | 33.42 |
| 5 | 250 | 2750 | 41.83 |
| 6 | 300 | 3300 | 50.18 |
| 7 | 350 | 3850 | 58.29 |
| 8 | 400 | 4400 | 66.67 |
| 9 | 450 | 4950 | 74.99 |
| 10 | 500 | 5500 | 83.29 |
| Execution Number | Total Number of Simulators (m) | Total Number of Messages Sent to Broker | Average of Execution Time Simulator 1 (min) |
|---|---|---|---|
| 1 | 1 | 550 | 8.29 |
| 2 | 2 | 1100 | 8.65 |
| 3 | 3 | 1650 | 8.79 |
| 4 | 4 | 2200 | 9.06 |
| 5 | 5 | 2750 | 9.17 |
| 6 | 6 | 3300 | 9.66 |
| 7 | 7 | 3850 | 10.49 |
| 8 | 8 | 4400 | 10.57 |
| 9 | 9 | 4950 | 11.65 |
| 10 | 10 | 5500 | 11.94 |
| Execution Number | Number of PARKS | Total Number of Sensors in p Parks | Sampling Period per Sensor (sp) (s) | Total Number of Messages Sent to Broker | Average of Execution Time (min) |
|---|---|---|---|---|---|
| 1 | 1 | 11 | 9.4 | 550 | 8.32 |
| 2 | 2 | 22 | 18.8 | 1100 | 16.39 |
| 3 | 3 | 33 | 28.2 | 1650 | 24.42 |
| 4 | 4 | 44 | 37.6 | 2200 | 33.42 |
| 5 | 5 | 55 | 47 | 2750 | 41.07 |
| 6 | 6 | 66 | 56.4 | 3300 | 48.93 |
| 7 | 7 | 77 | 65.8 | 3850 | 57.10 |
| 8 | 8 | 88 | 75.2 | 4400 | 65.53 |
| 9 | 9 | 99 | 84.6 | 4950 | 75.18 |
| 10 | 10 | 110 | 94 | 5500 | 80.99 |
| Number of Parks per Simulator | Total Number of Sensors per Simulator | Sampling Period per Sensor (sp) (s) | Total Number of Messages per Simulator | Average ofExecution Time Simulator 1 (min) | Average ofExecution Time Simulator 2 (min) |
|---|---|---|---|---|---|
| 1 | 11 | 9.4 | 550 | 8.27 | 8.25 |
| 2 | 22 | 18.8 | 1100 | 16.58 | 16.56 |
| 3 | 33 | 28.2 | 1650 | 24.67 | 24.63 |
| 4 | 44 | 37.6 | 2200 | 33.16 | 33.00 |
| 5 | 55 | 47 | 2750 | 41.15 | 41.14 |
| 6 | 66 | 56.4 | 3300 | 49.70 | 49.62 |
| 7 | 77 | 65.8 | 3850 | 57.80 | 57.64 |
| 8 | 88 | 75.2 | 4400 | 66.24 | 66.16 |
| 9 | 99 | 84.6 | 4950 | 74.90 | 74.95 |
| 10 | 110 | 94 | 5500 | 82.61 | 82.45 |
| Arrivals | |
|---|---|
| Number of arrivals (#cars) | 20,022 |
| Average arrival intervals (h) | 0.0499459154364 |
| Average arrival rate (#cars/h) | 20.0216572519182 |
| Number of not waiting customers (#cars) | 2175 |
| Average nonzero waiting time (h) | 0.408778925789 |
| Number of lost customers (#cars) | 3326 |
| Probability PN that there are N clients in the system; N = 60, P60 | 0.166117271 |
| λlost =Lost customers rate (λ * P60) (#cars/h) | 3.325943064 |
| Effective arrival rate (λeff = λ − λlost) (#cars/h) | 16.69571419 |
| Service | |
| Average service time (h) | 2.97829065 |
| Average service rate (#cars/h) | 0.335763065 |
| Number of customers served (#cars) | 16,636 |
| Average number of busy parking spaces (#cars) | 49.53645989 |
| Utilization of parking lot (%) | 99.07291979 |
| Queue | |
| Average queue length (#cars) | 5.915193287 |
| Average waiting time (h) | 0.355495085 |
| System | |
| Average system size (#cars) | 55.45165318 |
| Average system time (h) | 3.323770353 |
| 1000 h | 5000 h | ||||
|---|---|---|---|---|---|
| Measure | Theoretical from Mathematical Model | Experimental | Accuracy (%) | Experimental | Accuracy (%) |
| Lq | 6.04420 | 5.91519 | 97.87 | 6.02325 | 99.65 |
| Wq | 0.36579 | 0.35550 | 97.19 | 0.36486 | 98.74 |
| Ls | 55.66485 | 55.45165 | 99.62 | 55.58058 | 99.85 |
| Ws | 3.36879 | 3.32377 | 98.66 | 3.36109 | 99.77 |
| Performance Measures | N = c + QC | |||||
|---|---|---|---|---|---|---|
| 20 | 40 | 60 | 80 | 100 | ||
| λ = 18 | Lq | 9.7680287 | 8.7731639 | 4.2386577 | 0.0574124 | 0.0000000 |
| Wq | 2.9049968 | 0.8819170 | 0.2617368 | 0.0031796 | 0.0000000 | |
| Ls | 19.7674165 | 38.7650848 | 53.0444338 | 53.7451905 | 53.7221771 | |
| Ws | 5.8802601 | 3.8972909 | 3.2707136 | 2.9995683 | 2.9906034 | |
| λ = 19 | Lq | 9.7857790 | 8.8963941 | 5.0577142 | 0.1548115 | 0.0000210 |
| Wq | 2.9516445 | 0.8956879 | 0.3057474 | 0.0084220 | 0.0000027 | |
| Ls | 19.7851786 | 38.8888549 | 54.2292723 | 56.9578859 | 57.3252534 | |
| Ws | 5.9698368 | 3.9152395 | 3.2833324 | 3.0026420 | 3.0083440 | |
| λ = 20 | Lq | 9.7993401 | 8.9989178 | 6.0102552 | 0.4050986 | 0.0000000 |
| Wq | 2.9356919 | 0.9007006 | 0.3658240 | 0.0208122 | 0.0000008 | |
| Ls | 19.7987141 | 38.9913721 | 55.6044419 | 60.1219889 | 60.3234000 | |
| Ws | 5.9333933 | 3.9023497 | 3.3791768 | 3.0301136 | 3.0038029 | |
| λ = 21 | Lq | 9.8094943 | 9.0844409 | 6.6684213 | 0.8048002 | 0.0006822 |
| Wq | 2.9403526 | 0.9062943 | 0.4025095 | 0.0384241 | 0.0000318 | |
| Ls | 19.8089609 | 39.0789421 | 56.4512113 | 62.7442819 | 62.3487029 | |
| Ws | 5.9367949 | 3.9008090 | 3.4017842 | 3.0320373 | 2.9949809 | |
| λ =22 | Lq | 9.8192339 | 9.1647395 | 7.1485597 | 1.4979797 | 0.0087552 |
| Wq | 2.9595867 | 0.9134098 | 0.4304650 | 0.0703336 | 0.0003686 | |
| Ls | 19.8187323 | 39.1588491 | 57.0144941 | 65.9122711 | 65.8330126 | |
| Ws | 5.9753214 | 3.9008317 | 3.4366650 | 3.0676521 | 3.0016503 | |
| PerformanceMeasures | N = c + QC | |||||
|---|---|---|---|---|---|---|
| 20 | 40 | 60 | 80 | 100 | ||
| μ = 0.20 | Lq | 9.8863932 | 9.5689731 | 9.0070227 | 7.6498940 | 4.7682230 |
| Wq | 4.8665900 | 1.5941355 | 0.9007077 | 0.5445835 | 0.2680882 | |
| Ls | 19.8858434 | 39.5632003 | 58.9874069 | 77.5478518 | 93.5819453 | |
| Ws | 9.7894685 | 6.5909675 | 5.8971575 | 5.5409546 | 5.2532598 | |
| μ = 0.25 | Lq | 9.8555745 | 9.3928611 | 8.3538130 | 5.1568331 | 0.5429347 |
| Wq | 3.9298670 | 1.2437033 | 0.6710817 | 0.2962513 | 0.0267680 | |
| Ls | 19.8550151 | 39.3872245 | 58.3196181 | 74.2702010 | 79.3120437 | |
| Ws | 7.9156135 | 5.2155032 | 4.6785485 | 4.2805763 | 4.0008064 | |
| μ = 0.333 | Lq | 9.8026714 | 8.9884630 | 6.0432631 | 0.4625112 | 0.0002394 |
| Wq | 2.9802091 | 0.9024992 | 0.3654972 | 0.0231127 | 0.0000122 | |
| Ls | 19.8020543 | 38.9818001 | 55.6618919 | 60.3579146 | 59.8714172 | |
| Ws | 6.0222461 | 3.9150850 | 3.3678719 | 3.0178405 | 2.9874388 | |
| μ = 0.40 | Lq | 9.7510344 | 8.4962144 | 2.8260818 | 0.0077262 | 0.0000000 |
| Wq | 2.4585182 | 0.7082706 | 0.1488769 | 0.0004131 | 0.0000000 | |
| Ls | 19.7504318 | 38.4837565 | 50.2103554 | 50.0408668 | 49.6733216 | |
| Ws | 4.9807359 | 3.2049578 | 2.6380632 | 2.4969140 | 2.5017118 | |
| μ = 0.45 | Lq | 9.7096445 | 8.0197927 | 0.9182672 | 0.0000100 | 0.0000000 |
| Wq | 2.1612553 | 0.5973917 | 0.0468604 | 0.0000003 | 0.0000000 | |
| Ls | 19.7089036 | 37.9874633 | 44.8559913 | 44.4241978 | 44.5504995 | |
| Ws | 4.3871795 | 2.8274819 | 2.2700039 | 2.2243556 | 2.2287925 | |
| Arrivals | Service | Queue | System | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| c | N = c + 10 | Number of Arrivals (#cars) | Number of Lost Customers (#cars) | Number of Lost Customers (%) | Average Number of Busy Parking Spaces (#cars) | Average Number of Idleness Servers (%) | Average Parking Lot Utilization (%) | Average Queue Length (Lq) (#cars) | Average Waiting Time (Wq) (h) | Average System Size (Ls) (#cars) | Average System Time (Ws) (h) |
| 10 | 20 | 100,349 | 83,568 | 83.27736201 | 9.999422017 | 0.005779828 | 99.99422017 | 9.798104615 | 2.921538755 | 19.79752663 | 5.903868165 |
| 20 | 30 | 99,931 | 66,804 | 66.85012659 | 19.99719807 | 0.014009667 | 99.98599033 | 9.495001551 | 1.432918368 | 29.49219962 | 4.452721938 |
| 30 | 40 | 100,036 | 49,764 | 49.74609141 | 29.99386221 | 0.020459301 | 99.9795407 | 8.987784398 | 0.893849579 | 38.98164661 | 3.877717338 |
| 40 | 50 | 100,108 | 33,351 | 33.31501978 | 39.95915411 | 0.102114716 | 99.89788528 | 8.022455748 | 0.600431232 | 47.98160986 | 3.593985154 |
| 50 | 60 | 100,201 | 17,798 | 17.76229778 | 49.61807766 | 0.763844672 | 99.236 15533 | 6.056626181 | 0.367399439 | 55.67470385 | 3.378381194 |
| 60 | 70 | 100,376 | 5337 | 5.31700805 | 57.16125369 | 4.731243856 | 95.26875614 | 2.835667889 | 0.148552542 | 59.99692157 | 3.154269122 |
| 70 | 80 | 99,434 | 366 | 0.368083352 | 59.41990667 | 15.11441904 | 84.88558096 | 0.359997586 | 0.018082026 | 59.77990426 | 3.019445625 |
| 80 | 90 | 100,177 | 30 | 0.029946994 | 60.42871118 | 24.46411102 | 75.53588898 | 0.034389131 | 0.001728087 | 60.46310031 | 3.016886058 |
| 90 | 100 | 99,498 | 0 | 0 | 59.8415345 | 33.50940611 | 66.49059389 | 6.03027 × 10−5 | 8.51719 × 10−6 | 59.84159481 | 3.005858178 |
| 100 | 110 | 99,676 | 0 | 0 | 59.62648983 | 40.37351017 | 59.62648983 | 0 | 0 | 59.62648983 | 2.989775325 |
| 110 | 120 | 99,717 | 0 | 0 | 59.75408406 | 45.6781054 | 54.3218946 | 0 | 0 | 59.75408406 | 2.997618602 |
| 120 | 130 | 99,650 | 0 | 0 | 59.84377321 | 50.13018899 | 49.86981101 | 0 | 0 | 59.84377321 | 3.003488982 |
| 130 | 140 | 99,378 | 0 | 0 | 59.66648554 | 54.10270343 | 45.89729657 | 0 | 0 | 59.66648554 | 3.002630658 |
| 140 | 150 | 99,822 | 0 | 0 | 59.85142554 | 57.24898176 | 42.75101824 | 0 | 0 | 59.85142554 | 2.997808869 |
| 150 | 160 | 100,078 | 0 | 0 | 60.07199384 | 59.9520041 | 40.0479959 | 0 | 0 | 60.07199384 | 3.002222787 |
| T (h) | Simulator 1 Total Number of Sensors/Actuators = 1084 (P1; P2; P3; P4; P5; P6; P7; P8; P9; P10; P11; P12; P13; P14; P15) | Simulator 2 Total Number of Sensors/Actuators = 456 (P16; P17; P18; P19; P20; P21; P22; P23; P24) | ||||||
|---|---|---|---|---|---|---|---|---|
| Total Number of Messages Sent to Broker | Average of Execution Time in the Simulator (min) | Total Number of Messages sent to Broker | Average of Execution Time in the Simulator (min) | |||||
| Arrivals | Departures | Total | Arrivals | Departures | Total | |||
| 100 | 29,482 | 28,610 | 58,092 | 25.62 | 15,296 | 14,849 | 30,145 | 13.34 |
| 200 | 59,417 | 58,566 | 117,983 | 41.37 | 30,230 | 29,776 | 60,006 | 24.75 |
| 300 | 89,252 | 88,358 | 177,610 | 62.06 | 45,228 | 44,772 | 90,000 | 37.96 |
| 400 | 118,661 | 117,774 | 236,435 | 79.19 | 59,646 | 59,194 | 118,840 | 47.06 |
| 500 | 148,068 | 147,111 | 295,179 | 105.64 | 74,892 | 74,436 | 149,328 | 67.31 |
| 600 | 178,255 | 177,319 | 355,574 | 126.00 | 90,463 | 90,007 | 180,470 | 79.08 |
| 700 | 207,914 | 207,007 | 414,921 | 135.52 | 105,113 | 104,657 | 209,770 | 84.22 |
| 800 | 237,594 | 236,695 | 474,289 | 156.16 | 120,078 | 119,627 | 239,705 | 95.72 |
| 900 | 267,082 | 266,189 | 533,271 | 169.40 | 134,243 | 133,789 | 268,032 | 103.87 |
| 1000 | 297,954 | 297,066 | 595,020 | 194.35 | 149,982 | 149,529 | 299,511 | 120.23 |
| Real Time (h) | Simulator 1 Total Number of Sensors/Actuators = 1084 (P1; P2; P3; P4; P5; P6; P7; P8; P9; P10; P11; P12; P13; P14; P15) | Simulator 2 Total Number of Sensors/Actuators = 456 (P16; P17; P18; P19; P20; P21; P22; P23; P24) | ||||||
|---|---|---|---|---|---|---|---|---|
| Total Number of Messages sent to Broker | Average of Execution Time in the Simulator (min) | Total Number of Messages sent to Broker | Average of Execution Time in the Simulator (min) | |||||
| Arrivals | Departures | Total | Arrivals | Departures | Total | |||
| 1 | 303 | 47 | 350 | 63.98 | 152 | 20 | 172 | 62.57 |
| 5 | 1489 | 763 | 2252 | 301.33 | 875 | 459 | 1334 | 301.23 |
| 10 | 3082 | 2180 | 5262 | 605.06 | 1610 | 1164 | 2774 | 603.22 |
| 15 | 4478 | 3601 | 8079 | 903.57 | 2359 | 1905 | 4264 | 902.19 |
| 24 | 7079 | 6216 | 13,295 | 1443.97 | 3713 | 3262 | 6975 | 1442.54 |
| Number of Threads | Ramp-Up Period | Average Throughput | Response Time | Error (%) | ||
|---|---|---|---|---|---|---|
| Average | Minimun | Maximun | ||||
| 1500 | 60 | 7.8/s | 71,207 | 8050 | 130,141 | 0.00% |
| 2000 | 60 | 7.8/s | 102,529 | 6313 | 203,920 | 0.00% |
| 2000 | 120 | 7.9/s | 72,774 | 4214 | 136,719 | 0.00% |
| 2000 | 180 | 7.9/s | 41,169 | 2376 | 79,713 | 0.00% |
| 2500 | 180 | 7.9/s | 72,628 | 3907 | 136,963 | 0.00% |
| 10,000 | 3600 | 2.7/s | 1119 | 1089 | 4218 | 0.00% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jurado Pérez, L.; Salvachúa, J. Simulation of Scalability in Cloud-Based IoT Reactive Systems Leveraged on a WSAN Simulator and Cloud Computing Technologies. Appl. Sci. 2021, 11, 1804. https://doi.org/10.3390/app11041804
Jurado Pérez L, Salvachúa J. Simulation of Scalability in Cloud-Based IoT Reactive Systems Leveraged on a WSAN Simulator and Cloud Computing Technologies. Applied Sciences. 2021; 11(4):1804. https://doi.org/10.3390/app11041804
Chicago/Turabian StyleJurado Pérez, Luis, and Joaquín Salvachúa. 2021. "Simulation of Scalability in Cloud-Based IoT Reactive Systems Leveraged on a WSAN Simulator and Cloud Computing Technologies" Applied Sciences 11, no. 4: 1804. https://doi.org/10.3390/app11041804