1. Introduction
The Boeing 747-200 is a long-range, wide-body, large aircraft designed and developed by Boeing, a commercial airplane company in the USA. It is powered by a high-bypass turbofan engine developed by Pratt and Whitney. Some different variants also have GE-CF6 engines, and original variants have Rolls-Royce RB211 engines. It has a pronounced wing sweep, allowing a cruise Mach number of 0.90. The 747-200B was the basic passenger version of its series with increased fuel capacity and more powerful engines. General specifications of the Boeing 747-200 are given in
Table 1.
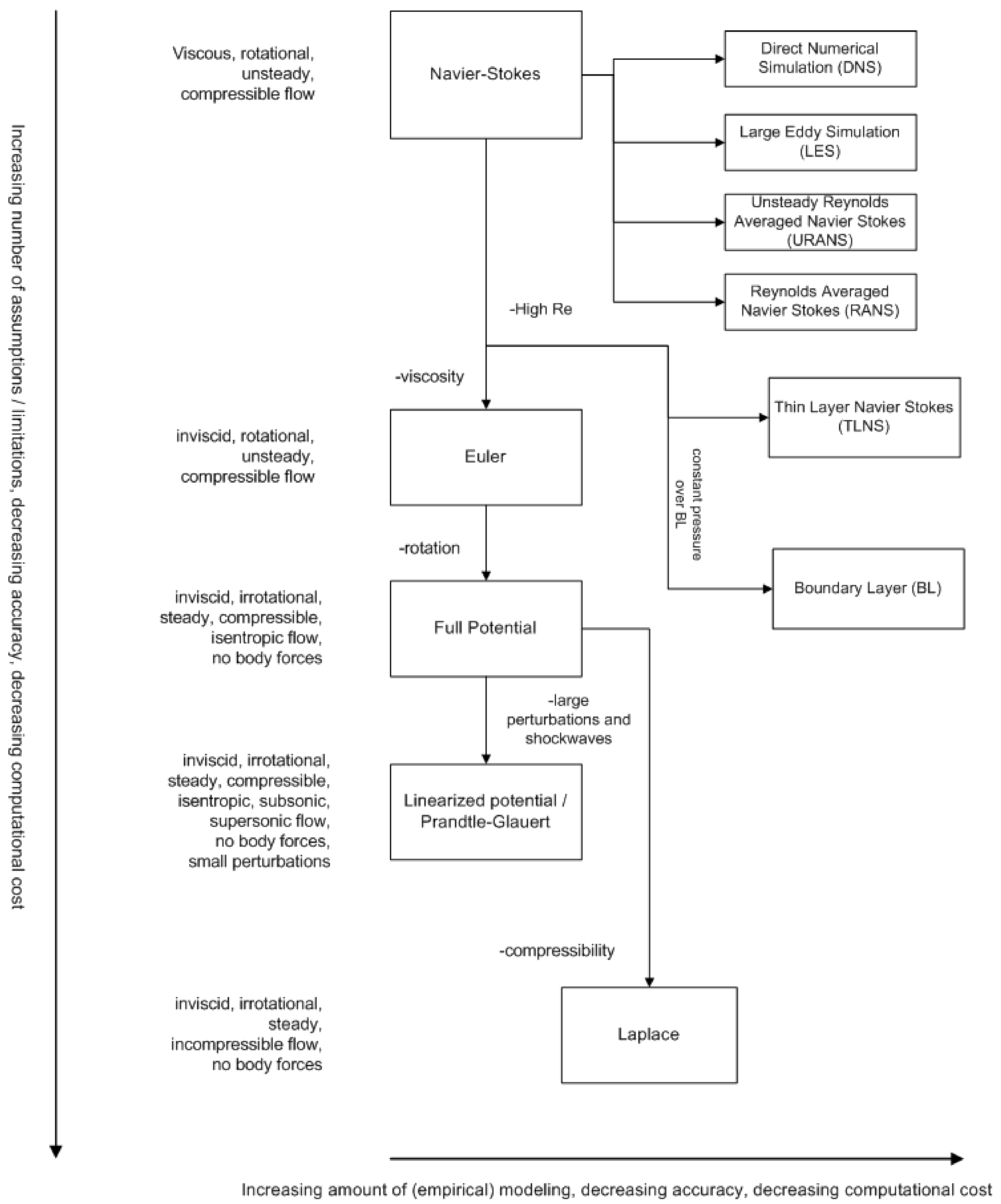
Flow field characteristics can be obtained by applying various aerodynamic flow models. Navier–Stokes (NS) equations are the most accurate flow models that describe viscous, rotational, and compressible flows. These are based on the Eulerian approach and primarily describe the momentum equation. The mass and energy equations are defined using additional relations to solve NS equations [
2].
Based on the accuracy and vast applications, NS equations are used in different forms, such as direct numerical solution (DNS), large eddy simulation (LES), unsteady Reynolds-averaged Navier–Stokes (URANS), Reynolds-averaged Navier–Stokes (RANS), thin-layer Navier–Stokes (TLNS), and turbulence modeling (TM) [
3]. Boundary-layer equations are based on the concept that at large Reynolds numbers, the viscous effects are limited to a thin region of flow adjacent to the body surface. BL equations are found by dropping the viscous diffusion terms from Navier–Stokes equations because they have little contribution to the solution. The pressure is assumed to be constant along the length in BL models [
4]. Euler equations are the conservation laws assuming inviscid flow. The continuity equations do not change; however, energy relations may vary according to the flow characteristics. The assumption of inviscid flow does not limit the applicability of these equations. Moreover, outside the boundary layer, this assumption is also feasible for the flow properties. Modeling flow can be further simplified if the flow is assumed to be irrotational (zero vorticity) [
5]. The full potential model combines all the conservation laws (continuity, momentum, and energy equations) [
6]. Linearized potential equations are developed by decomposing the velocity into an unperturbed component and a perturbed component, which helps one to solve the non-linearity. Prandtl–Gluert’s relation applies to the flows outside the transonic and hypersonic regimes [
7]. For an incompressible flow, the Laplace equation in full potential form is reduced to partial differential equations. The Laplace equation has linearized behavior and has an exact solution. The discretization form of this equation is not required, and hence numerical errors do not exist [
8]. Empirical methods do not model the flow; however, these can be used for the estimation of aerodynamic performance [
9]. Estimations of lift, drag, and aerodynamic efficiency can be performed by using empirical methods. These methods are further used for stability and control derivatives of the complete aircraft, for instance, in US DATCOM (United States Data Compendium). The evolution of various aerodynamic flow models is described in the flow chart shown in
Figure 1.
Aerodynamic coefficients can be estimated using experimental and computational techniques. There are various computational techniques available, e.g., DATCOM, XFLR, TORNADO, AVL, PANAIR, and ANSYS. Each technique has its limitations that restrict its areas of application. TORNADO is a program based on potential flow theory that incorporates the vortex lattice method as its background theory. The wake from lifting surfaces creates vortices and TORNADO captures these effects through horse-shoe or horse-sling arrangements. This program determines the first-order derivatives using a central-difference calculation with the help of a pre-selected state and a disturbed state. The results obtained are accurate only for small rotations or small angles of attack. Moreover, compressibility effects are also not catered to in TORNADO; hence, high Mach number situations cannot be handled accurately [
12].
Athena Vortex Lattice (AVL) was developed for the MIT Athena TODOR aero software collection. AVL also solves potential flow through the vortex lattice method. It assumes quasi-steady flow and the compressibility effects are provided through the Prandtl–Gluert model. This program was designed for thin airfoils, small angles of attack, and sideslip. Since slender body analysis is not accurate, it is often suggested to leave fuselage out of the analysis in AVL [
13]. Panel Aerodynamics (PANAIR) is a program that uses a higher-order panel method to predict boundary value problems using Prandtl–Gluert relations. It provides a higher-order modeling capability in subsonic and supersonic regions. PANAIR revolutionized the supersonic surface modeling in contrast to average surface meshes. The higher-order panel method yields accurate velocity distributions. PANAIR cannot predict flow dominated by viscous and transonic flow effects. Automatic wake determination through PANAIR is also not accurate. Moreover, for configurations with different total pressures, this program cannot accurately predict the flow characteristics [
14]. FLUENT and CFX are two modules of ANSYS. FLUENT employs a cell-centered method and CFX works on a vertex-centered approach. This software can handle different types of meshing operations. such as polyhedral and cut cell meshing (in the case of FLUENT) and tetra and hexa mesh topologies (in the case of CFX). ANSYS is an excellent tool to determine stability and control characteristics, but it takes a long time and has a complex mesh generation process. For industry, it is an ideal tool, since its accuracy and precision is comparable to wind tunnel testing.
Aerodynamic Model Builder (AMB) is a module dedicated to stability and control of the aircraft. It is used to estimate the aerodynamic forces and moments [
15,
16]. Unlike DATCOM, aerodynamic analysis can be performed in TORNADO software. Moreover, compressible and non-viscous flows can be solved using EDGE (CFD solver) for an irregularly structured tetrahedral mesh produced by the mesh generators SUMO and Tetgen [
15]. The feasibility of hypersonic flight is highly dependent on the controller’s design. Due to extreme flow conditions, it is a challenge to develop a design for a large flight envelope and strong interactions between propulsion and structural systems [
17,
18]. However, the control-oriented model, truth model, wing-cone model, curve-fitted model, and re-entry motion are few techniques with which to take up this challenge [
17]. The aerodynamic stall is an important phenomenon while determining the stability and control characteristics [
19,
20]. Beyond this point, non-linearities and instabilities appear in the flow, and analysis models must be accurate to comment on the complicated flow field. Bifurcation analysis is a tool that discusses the effect of unknown pitch damping dynamics when the aircraft is under a deep-stall transition [
21]. Another approach to study the instability effects in time-domain methods is the recursive least squares. The technique uses a recursive formulation to account for residuals, encountered during estimation of aircraft parameters [
22,
23]. The flow phenomenon over the control surfaces or wing may undergo large variations; therefore, precise simulations are required to obtain accurate results [
20,
24]. In order to predict the responses for unsteady and nonlinear flight envelopes in high maneuvering operations, extensions to aerodynamic models need to be incorporated [
25]. Due to extreme flight conditions, civil or military aircraft may cross normal operating limits. Therefore, prevention or recovery methods are also required to be incorporated in the aerodynamic model [
26]. The development of extensive aerodynamic modeling techniques can fulfill these requirements [
19]. Information about identification of model can also be obtained from dynamic test methods [
27]. The modeling of rotorcraft aerodynamic interference has proven to be a challenging problem due to the complex flow-field interactions between the rotors and other aircraft subsystems. An effective and efficient aerodynamic simulation tool was proposed by combining a Lagrangian solver [
21,
28]. Data obtained from a quick accesses recorder (QAR) is another efficient way to determine the effects of extreme weather conditions [
22,
29].
Bryan introduced the theory of aerodynamic derivatives in 1911, and it has remained unchanged as the standard pattern for the interpretation of the aerodynamic loads in equations of motion (EOMs). Aerodynamic forces and moments are assumed to be the functions of control angles, disturbance velocity, and rates of control angles. At low angles of attack (AoA) and in slow-moving airplanes, aerodynamic loads can be easily modeled by using static derivatives. However, at high AoA, dynamic derivatives can greatly affect the stability characteristics [
30]. The variation in the stability derivative can be taken into account by adding the non-linear terms along with extensions in the range of flight conditions [
31]. Grauer and Morelli [
32] developed a procedure to determine the single generic global aerodynamic model structure that could be applicable to various aircraft. The analysis was carried out by applying multivariate-orthogonal-function modeling on wind-tunnel aerodynamic databases of different aircraft over a wide range of angles, rates, and deflections of control surfaces.Drela et al. [
33] investigated the aerodynamic benefit from ingestion of boundary layer of a transport aircraft. The power balance method was developed based upon the mechanical power required and streamwise forces acting on the aircraft. The results showed an increase in efficiency of up to 9% at low cruise power conditions. Grauer and Morelli [
34] developed a generic nonlinear aerodynamic model based upon multivariate orthogonal function. The model accurately predicted the global and local dynamic behavior and trim solutions over a range of large amplitude excitations. Triet et al. [
35] and Nguyen et al. [
36] performed aerodynamic analysis of an aircraft wing using computational fluid dynamics. The variation of velocity and pressure distribution on the wing was captured by using ANSYS Fluent package. The coefficients of lift and drag were estimated based upon data obtained at different boundary conditions. Vecchia and Nicolosi [
37] provided the guidelines in the design and optimization of transport aircraft. MATLAB algorithm was developed to determine the aerodynamic coefficients. The panel code solver was used to optimize the geometrical shapes. The procedure helped to import and modify geometries by interpolation of curves and surfaces.Nicolosi et al. [
38] presented a method to determine the aerodynamic performance of aircraft fuselage. During the study, the contribution of the fuselage to overall stability and its interactions with the wings and tail were investigated. Numerical simulations were carried out based upon CFD techniques and aerodynamic coefficients were estimated. Ammar et al. [
15] performed the stability analysis of a blended-wing-body aircraft. The static and dynamic stability and flying quality analysis was carried out in a flight envelope by applying aircraft synthesis and integrated optimization methods. The flight envelope was created and the TORNADO program was used to estimate the aerodynamic coefficients of aircraft. Rizzi [
39] presented an overview of the simulated stability and control system of an aircraft. Flying and handling qualities were determined using integrated optimization techniques. Lu [
40] investigated the dynamic stability and control characteristics of a tilt-rotor aircraft using mathematical nonlinear flight dynamics techniques. The damping coefficients in longitudinal and lateral modes were estimated and their effects on overall stability characteristics were analyzed.
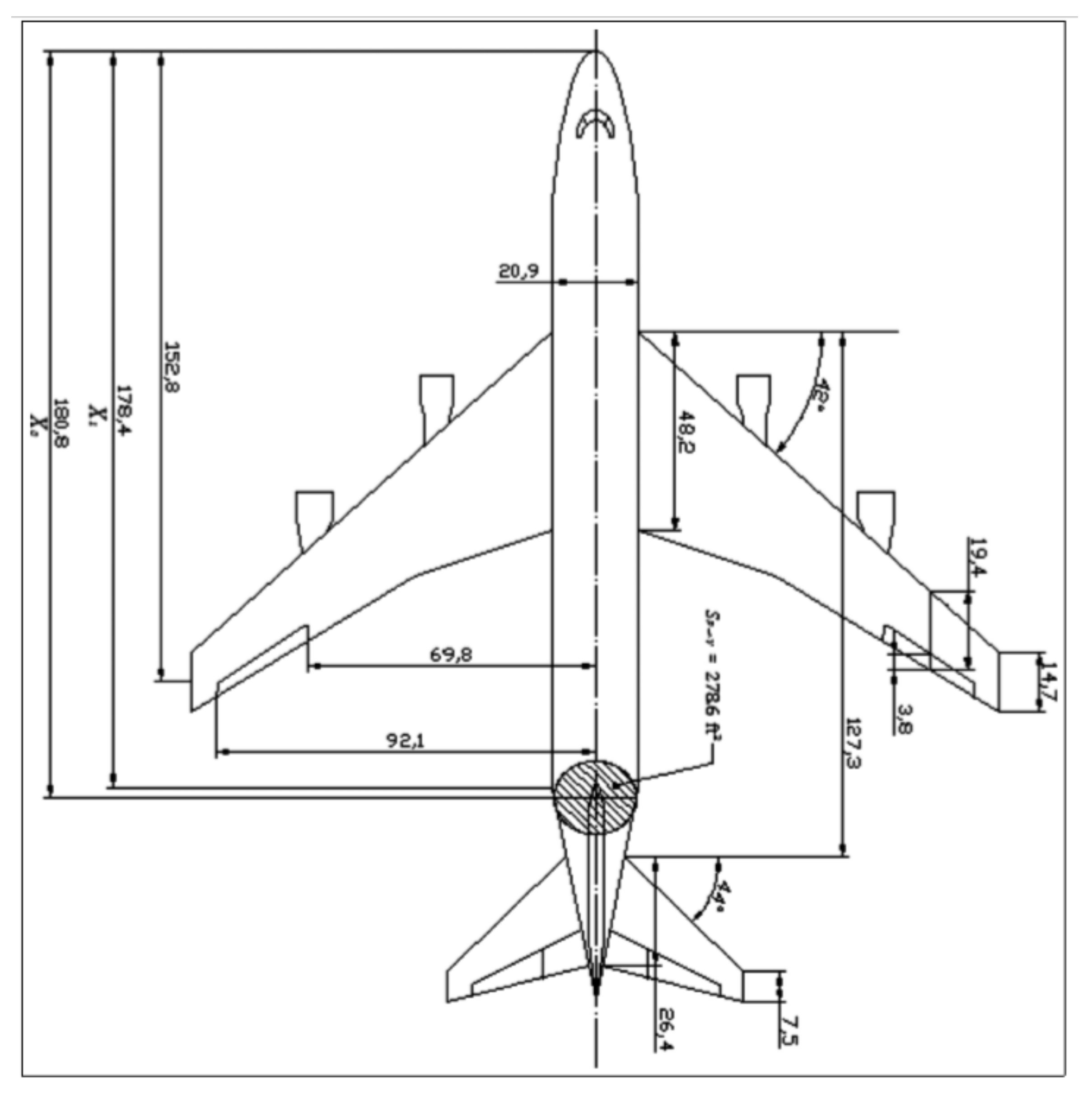
The geometric parameters along with flight conditions are the basic and most important requirements for modeling the aircraft in any software. The data of a Boeing 747-200 are readily available in online sources to be used as the foundations of modeling and analysis of the aircraft. The geometric parameters along with control surface clearances were acquired from established literature and reliable online sources [
41]. Based upon theoretical knowledge such as the vortex latex method (VLM), source code was generated in both computer programs. For modeling of aircraft to acquire stability and control derivatives, design flight conditions were used. Analytical results available in the literature for low-cruise-flight conditions were selected as a benchmark.
Figure 2 shows the flow chart of the methodology adopted during the project. The parameters in both software applications were derived from basic equations of motion (Equations (1)–(6)) for an aircraft (six degrees of freedom system) readily available in the literature [
1,
42].
Moment equations:
where
l,
m, and
n represent the rolling, pitching, and yawing moments.
,
, and
represent the resultant forces in longitudinal, lateral, and vertical axes, respectively. The symbols
M and
t represent the mass of the body and the time domain, respectively. The symbols
u,
v, and
w represent the axial, side, and normal velocity components, respectively. The symbols
p,
q, and
r represent the roll, pitch, and yaw rates, respectively.
,
, and
represent the moment of inertia components in x, y, and z-axes.
,
, and
represent the products of inertia in roll, pitch, and yaw axes.
The equations of motion are derived for a particular axis system specific to the aircraft. Equations for aerodynamic, gravitational, and propulsive are derived using Newton’s equations of motion while applying Euler angle corrections to make the equations consistent in one frame of reference. Small-angle approximation and steady flight conditions are used to linearize the equations with the assumption that small perturbations occur in the motion of an aircraft during steady flight. This assumption holds good for the theoretical determination of stability for the small-amplitude motion of aircraft. Once employed, forces/moments in x, y, and z-directions are computed and observation is the coupling of lateral and directional motion. The stability and control of an aircraft can be troublesome if things are discussed in theoretical form but a representation using stability and control coefficients makes life easier. After the development of complete linearized equations of motion, Taylor’s series expansion is used to determine the relations of the rates of change of stability parameters. The expressions of stability/control coefficients and derivatives are used in software solutions to run the simulations of modeled aircraft. The results are obtained using visual tools along with insights into the aerodynamic behavior of aircraft during motion.
In the present research, stability parameters for wide-body aircraft have been estimated using computational techniques. The comparison of statistical software (DATCOM) with a computational technique (XFLR) for a wide-body Boeing 747-200 is also presented. Although these software programs have been tested and evaluated multiple times, a one-to-one comparison for a Boeing 747-200 is the first of its kind. Results obtained from US DATCOM and XFLR software were compared for any differences and the they were also validated with analytical correlations presented in the literature. The material covered in the different sections is as follows.
In the second section, a brief overview of the US DATCOM algorithm, its applications, and its working principle to determine the stability and control coefficients have been discussed. Aerodynamic coefficients of a wide-body airplane have been estimated at given flight conditions. The variations of lift, drag, and moment coefficients have been obtained at various angle of attack. Moreover, longitudinal and lateral aerodynamic coefficients have also be acquired at different angles of attack and control surface deflections. In the third section, the XFLR algorithm to determine the stability and control analyses of an aircraft has been elaborated. The various applications and limitations of XFLR in aircraft design and analysis have also been discussed. In order to estimate the aerodynamic coefficients of Boeing 747-200 aircraft, the elements of the design process, including direct foil analysis, and wing and body design and analysis have been elaborated. The results of lift, drag, and moment coefficients have been acquired at different angles of attack and they have been plotted. Moreover, to check the stability conditions, eigenvalues for longitudinal stability (short period and Phugoid) and lateral stability (spiral, roll, and Dutch roll) modes have also been evaluated. In the fourth section, results obtained from both the commercial packages are presented in terms of dimensionless aerodynamic coefficients. Results obtained at low-cruise-flight conditions have been compared with the analytical results available in the literature. The comparative analysis shows that results obtained from computational techniques are quite close to each other and to the analytical results. The comparison of longitudinal and lateral coefficients obtained from both pieces of software with the results available in the literature is summarized in
Appendix A. In the fifth section, analysis and discussion of the results obtained from both pieces of software have been given. Aerodynamic coefficients having a great influence on the accuracy of the results for the validation of the codes are also presented. Moreover, a graphical representation of aerodynamic coefficients at different angles of attack have also been added. In the sixth section, the conclusions have been drawn based on a comparison of results and computational analysis. The analysis provides meaningful results for the estimation of longitudinal stability and control derivatives from the knowledge of aircraft geometrical parameters and given flight conditions. In order to improve the source code by exploring some advanced features, a few recommendations have also been added in that section.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}