1. Introduction
Power transformers (PTs) are essential to maintain the stable operation of a power grid. There is a massive number of transformers in service, and internal faults occur in the long-term ageing process [
1]. However, conducting maintenance with system outage or assessment of the transformer means considering the expenditure and time due to production loss. Energize levels at 765 kV, and even 400 kV, can generate inrush currents which can cause internal PT damage. There are several protection schemes required for effective discrimination between an internal fault and inrush [
2].
The faulty components need to be fixed quickly as they can cause severe damage, loss, and power stability problems. Outages resulting from a fault in PTs cause significant revenue loss and affect consumer service. Therefore, online PT monitoring is needed to avoid these outages. If the faults are not detected, they will develop into more severe faults. Thus, detection of inter-turn faults is a concern in power systems [
3,
4]. The result of a transformer failure survey, based on the investigation of 750 massive transformer failures from 1996 to 2010, confirmed the importance of short-circuit strength as almost half of the failures were correlated to winding and the insulating system [
5,
6]. Accounting for transformer winding connections is required to apply differential protection principles to PTs. Concerning transformers of standard winding connections, these protection rules are commonly referred to as ratio matching, vector group compensation, and zero-sequence removal. The standard protection method is the differential protection current between the line-to-line. The protection method is used for protecting power transformers of 10 MVA and above [
7].
However, the differential protection provides accurate results in most of the fault cases, and it suffers from the problem of accidental tripping during external events such as magnetizing inrush conditions [
8]. The percentage differential scheme is used to restrain the second harmonic component, and sometimes the fifth harmonic component, to avoid accidental tripping against magnetizing inrush conditions [
2,
9]. Another problem when using conventional differential protection is the detection of the low-level winding turn-to-turn fault (TTF). If this fault happens, the terminal current is relatively unchanged, and the circulating current in the short turn area will increase and be dangerous. This protection only detects if the differential current exceeds 20% to 25% of the rated current [
10].
Many methods are used to detect TTFs in PT windings. Solutions include optimization of the PT’s estimation parameter problem [
11,
12,
13,
14] and an artificial base using neural networks [
15,
16] to detect TTFs. The optimization technique searches for the optimal PT parameter. Ouyang et al. [
17] applied the parameter identification of a transformer based on the PSO algorithm using port data. In this research, the internal transformer fault can be determined according to the model reference adaptive principle. The fitness function consists of the two models’ response performance, and its corresponding circuit parameters are calculated using the PSO algorithm. The PSO algorithm is used to obtain the optimum value from the model’s equivalent parameters and converge. The optimal parameter obtained from the optimization process is the equivalent parameter in the model to be identified. However, using the optimization method has a higher computational burden than using the analog signal-based method (terminal current signal).
The negative sequence current scheme could be an alternative for fault detection and distinguish between an internal (TTF) and an external fault. The negative sequence current is a simple and efficient protection technique to detect minor internal TTFs in PTs. According to [
10] and [
7], the negative sequence detects TTFs involving 1% transformer winding. However, the negative sequence current algorithm cannot distinguish when an external and internal fault occur simultaneously. The extended park vector algorithm (EPVA) method can detect and distinguish turn-to-turn winding insulation failures from magnetizing inrush current transients. The EPVA also overcomes the limitation of the negative sequence current algorithm. The EPVA is not affected by the external fault and can detect the TTF accurately.
Fuzzy logic was developed to detect TTFs in a transformer. Here, fuzzy logic is employed to monitor the transformer’s condition and improve the protection system’s performance. Using fuzzy logic overcomes the traditional PT differential scheme’s limitations by detecting a low-level TTF. The fuzzy-based technique is simple, robust, and able to detect incipient faults at an early stage [
4], and shows a fast and accurate trip operation [
18]. The fuzzy algorithm also improves the accuracy of the diagnosis and the efficiency of transformer maintenance [
19]. A combination technique using fuzzy logic and Clark’s transform was used to improve the differential protection performance [
20]. A TTF may occur even if no current is flowing on one side of the transformer during energization. With no current flowing in the secondary windings of the transformer, negative-sequence current-based algorithms become insensitive.
This paper discusses a voting algorithm that is a combination of several protection algorithms and used to make the right decision for fault detection. The algorithms used are the negative-sequence directional algorithm, EPVA, differential negative-sequence algorithm, and the fuzzy Mamdani conventional protective algorithm. According to the simulation, each algorithm detects whether the fault belongs to an internal or external fault. The results from each algorithm were collected, and we calculated how many possibilities of internal fault and external fault happened.
Section 2 of this paper introduces the turn-to-turn equivalent circuit and transformer configuration.
Section 3 discusses the purpose and method to detect and distinguish PT faults.
Section 4 shows the results and discussion of the TTF simulation in a PT for a 1% turn fault, followed by an external fault.
Section 5 concludes the research.
2. Hybrid Algorithm in TTF Diagnosis System
The hybrid algorithm’s aim is to create a fault detection system in a PT, especially for TTF recognition. The algorithm uses a terminal current as an input and generates a condition state of a PT regarding the TTF. The algorithm’s output can be used as a supporting tool to monitor a TTF inside a PT while not connected to the protection breaker of the PT. In this research, we simulated the proposed algorithm into a PT model using MATLAB Simulink. This algorithm combined and obtained results from the subalgorithms (
Figure 1b) to obtain the PT’s final condition fault status.
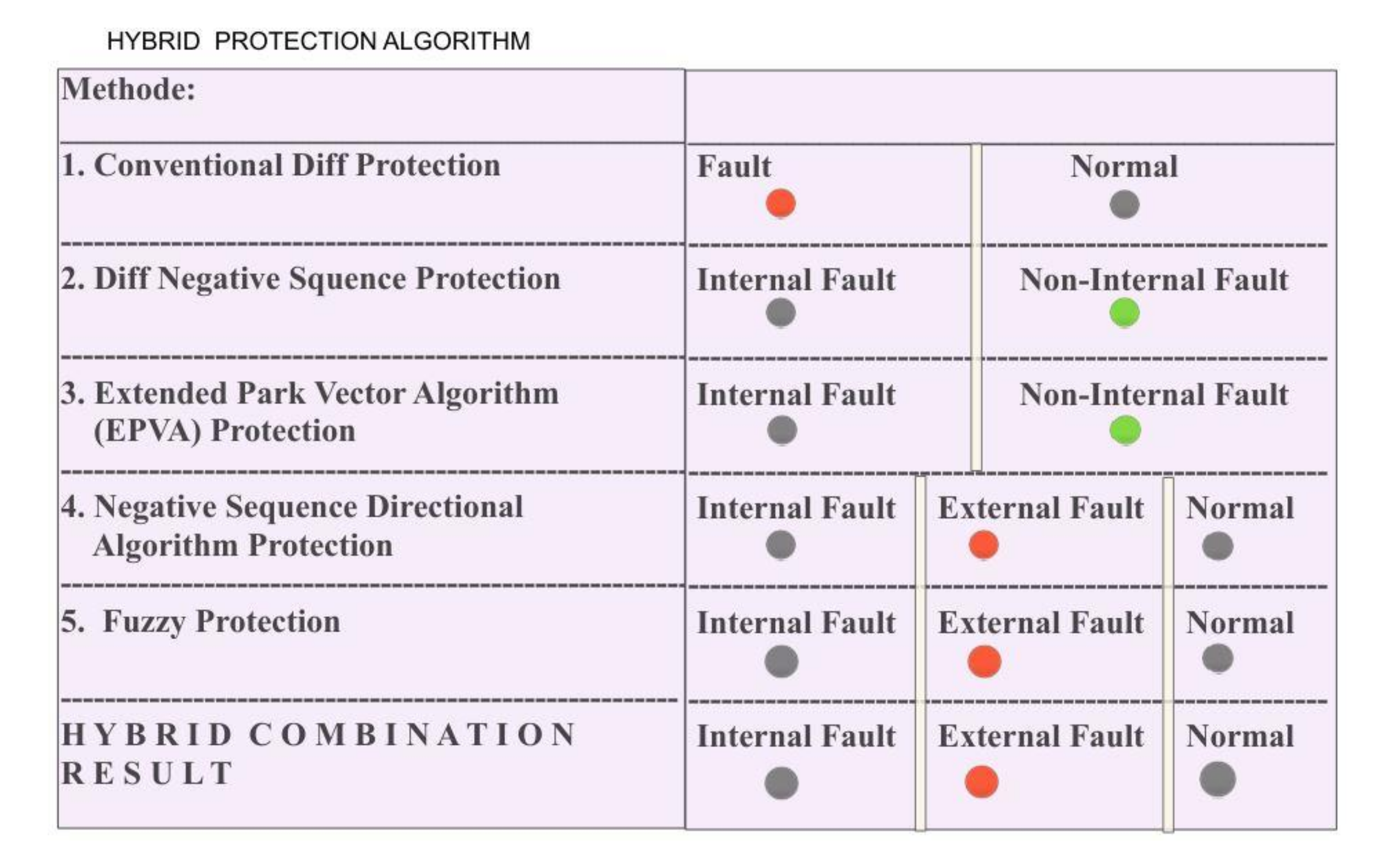
The sub algorithms are the conventional differential protection, negative-sequence directional algorithm, EPVA, negative differential sequence, and fuzzy EPVA algorithm. Each has a different role in PT fault diagnosis and generates different decisions (internal fault, external fault, and normal condition).
The conventional differential protection can detect fault if the difference value of the phase current between primary and secondary winding is higher than the threshold value. This protection only detects a fault or normal state and is incapable of distinguishing the type of fault, either internal or external. The negative sequence directional algorithm and fuzzy logic detect three states of a PT’s condition. Both can detect internal faults, which, in this case, was caused by a TTF.
The differential negative sequence and EPVA only detect internal and noninternal fault states. The hybrid algorithm protection decides the internal, external, or normal conditions based on each sub algorithm’s result. The hybrid algorithm chooses the most detected condition, which is generated by the sub algorithms.
This method is used to distinguish the weaknesses for each sub algorithm. The conventional differential protection is unable to distinguish if a fault in the transformer, either an internal or external fault, occurs. This algorithm is not sensitive enough to detect low-level TTFs inside the transformer [
3]. The negative-sequence directional algorithm can detect a TTF when external and internal faults occur simultaneously [
10]. The differential negative sequence and EPVA only detect the internal fault and non-internal fault conditions. When there is an external fault, the algorithm detects a non-internal fault, which is the same as in the normal condition. The internal fault will decide if there are more than or equal to two internal fault states (n
if), declared by the sub algorithm. This rule also applies to the external fault state (n
ef). The external fault will declare if there are more than two external fault statuses. A noninternal fault in the differential negative sequence protection and EPVA could indicate an external fault or a normal condition. A normal condition is decided if all sub algorithms declare a normal condition and a non-internal fault condition for the differential negative sequence protection and EPVA. The rule for the hybrid detection algorithm is expressed in Equation (1). Principally, the hybrid detection algorithm declares a transformer condition based on sub algorithm results. The interface from the hybrid algorithm detection is shown in
Figure 1a.
2.1. Conventional Differential Protection
The first sub algorithm is the conventional differential protection. This protection is a conventional method, which measures the differential current between the primary and secondary side for each phase. This protection is unit-type for a specified zone or piece of equipment. It is only in the case of faults to the zone that the differential current (the difference between input and output currents) is high [
21]. Differential protection schemes are mainly used for protection against phase-to-phase faults and phase-to-earth faults. Typically, the operating coil carries no current as they are balanced on both of the PT’s sides. When the fault occurs in the PT windings, the balance is disturbed. The differential relay’s operating coils carry a current corresponding to the different current among the transformers’ two sides. Thus, the relay trips the main circuit breakers on both sides of the PT. The first sub algorithm is mainly used to distinguish between the normal and external fault conditions in a PT.
2.2. Negative Sequence Directional Algorithm
The second sub algorithm is the negative-sequence directional algorithm. This algorithm uses an asymmetrical component from a 3-phase current principle to detect a fault, especially a TTF. When there is a fault, either internal or external, the current phase will not be symmetric or phasors become unbalanced. An unbalanced phasor generates positive (I
1), negative (I
2), and zero (I
0) sequence components, which are members of the balance set. The 3-phase currents from the primary and secondary side are extracted by the discrete Fourier transform algorithm. The symmetrical components determined by applying the Fortescue transformation are presented in Equation (3). The unbalance current can be expressed as the sum of their components, as shown in Equation (2).
A phase rotation operator (a) is defined to rotate a phasor vector. Phases are rotated forward by 120°. Conversely, the phase currents’ sequence components can be written as Equation (2) [
22].
The negative sequence current (I
2) will increase if there is an unbalanced phasor or fault. If the value exceeds a predefined threshold with a typical default of 4% of the rated current, the angle between them is compared. When a different angle (
∆ϕ2TH) is between a predefined directional limit, typically from ±60° to ±85° [
10], the internal fault is detected. Otherwise, it is an external fault (
Figure 2). The second subalgorithm is used for distinguishing between internal and external faults and normal condition.
2.3. EPVA
The third sub algorithm is the EPVA, which is based on a space vector transformation. A space vector transformation describes the three-phase systems’ behavior and was applied to the PT’s differential protection. The EPVA is based on the spectral analysis of the differential current Park’s vector modulus AC level.
The three-phase quantities are changed into a synchronous rotating reference frame using the ABC–DQ transformation [
23]. The direct and quadrature current from Park’s vector components (I
D, I
Q) are obtained by the Park transformation using Equation (5) [
10], where i
da, i
db, and i
dc denote the differential current for each phase. The current is used as inputs for calculating I
D and I
Q.
The DC level
is obtained using Equation (6). The EPVA current is proportional to the balanced three-phase current system (conditions A and B in
Figure 3). An incipient winding fault leads to an increase in the magnitude of the differential current of the affected phase compared with a healthy situation, which results in an unbalanced three-phase currents system (condition C in
Figure 3). Under these conditions, the differential current Park’s vector modulus contains a DC level and an AC level at twice the supply frequency (2f) [
24,
25]. The subalgorithm EPVA technique in this research is used to distinguish between internal fault and normal condition.
2.4. Differential Negative-Sequence Protection
The fourth sub algorithm is the differential negative sequence protection. The application of the negative-sequence algorithm for the protection of PTs has attracted great attention in the last years and several variants of the method have been proposed. This algorithm measures the different values of the negative-sequence current over a finite time. During an internal fault, the negative current sequence generates a current and the differential current (3) increases so the differential current and negative-sequence current can fuse. This algorithm uses the differential current (refer to Equation (4)) to obtain a negative-sequence component using Equation (3). The inputs from Equation (3) are substituted by the differential current value for each phase. The differential negative sequence can be expressed as Equation (7).
2.5. Fuzzy EPVA
The fuzzy inference system is a process that works using a parallel method. There is no data loss during the process because of this property. The fault detection generates more precise results than conventional relaying techniques [
18]. The fuzzy inference collects and processes data, mapping from a given input to an output, using fuzzy logic. All the rules are evaluated in parallel using fuzzy reasoning using the differential current and EPVA current as inputs to the fuzzy system (
Figure 4). The two inputs are processed inside the fuzzy logic system to generate a crisp value or output score for each fault (internal and external). This scoring system can indicate which fault occurred inside a PT.
Inside the fuzzy logic system are three parts: fuzzification, inference system, and de-fuzzification. Fuzzification is used to convert the measured quantities from the process (voltages, velocities, temperatures, etc.) into fuzzy sets used by the inference stage. Each input, either the EPVA current or the differential current, uses a trapezoidal form as its function with three levels (low, medium, and high). The membership function for the output value (internal and external fault) uses a Gaussian bell function with three values: incipient fault (IF), medium fault (MF), and severe fault (SF). The inference system is a process to determine each rule’s degree of firing in the rule base. The inference stage’s second function is to determine the degree to which each rule’s recommendation is weighted when arriving at the final decision, and to decide an implied fuzzy set corresponding to each rule. The number of fuzzy inference rules for the proposed system is 15, as shown in
Figure 5. The defuzzification stage converts the collection of recommendations of the rules into a crisp output. The centroid is used as a defuzzification stage in Equation (8) [
26], where DV signifies defuzzification value; and xi, and μ(xi) are inputs and the membership function value, respectively. If the DV from the internal fault is greater than the external fault, the decision is generated as an internal fault. However, if the DV from the internal fault is less than an external fault, the decision is generated as an external fault.
5. Conclusions
The hybrid algorithm protection’s objective is to minimize the misdiagnosis status generated by each sub algorithm regarding a PT’s condition. The algorithm declares a fault condition based on the results from the sub algorithms. The algorithm’s application is safe and simple and will not change the existing electrical system since its output is not connected to any circuit breaker protection. Based on the simulation result, the hybrid algorithm can detect incipient TTF until the 0.8% short-turn level, and increase the accuracy of TTF detection. In our simulation results for the TTF case, the hybrid algorithm detected the internal fault case in all the short-turn levels.
In this research, we only applied our proposed algorithm to a three-phase PT using a MATLAB Simulink model and a terminal current signal as an input. Hence, external factors such as temperature inside the PT, oil pressure, and other environmental aspects were not considered as an input for our system. Referring to the limitation issue, future research is needed to improve the methods for protecting PT.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

























