
Design and Demonstration of a Flying-Squirrel-Inspired Jumping Robot with Two Modes

Abstract
:1. Introduction
2. Design Goal
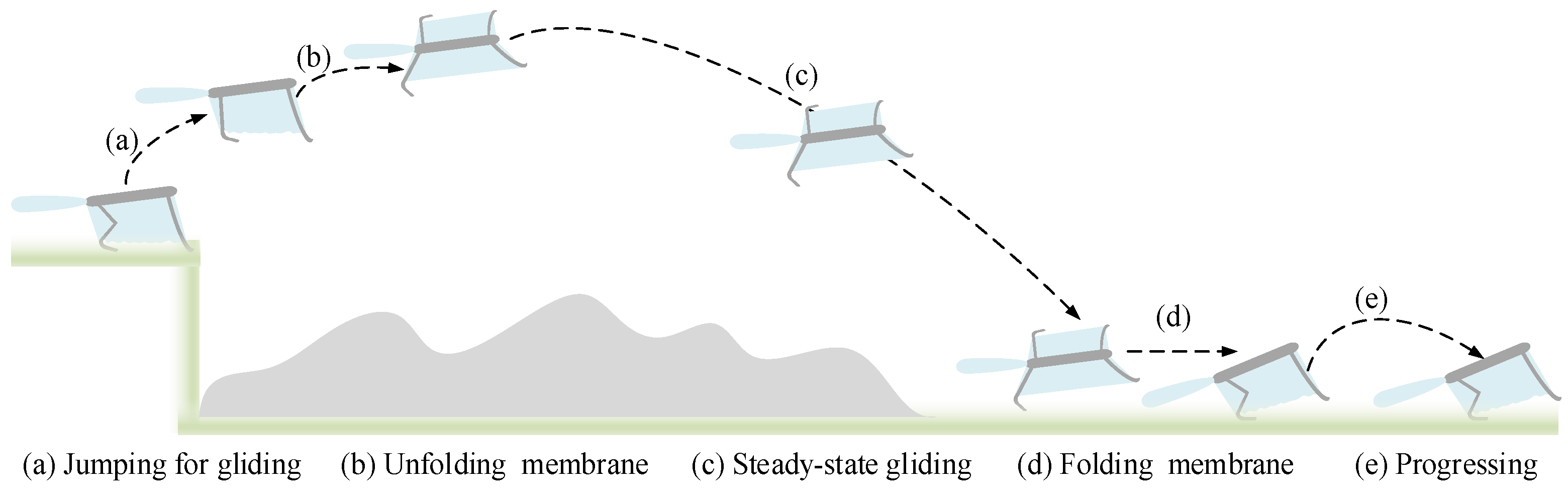
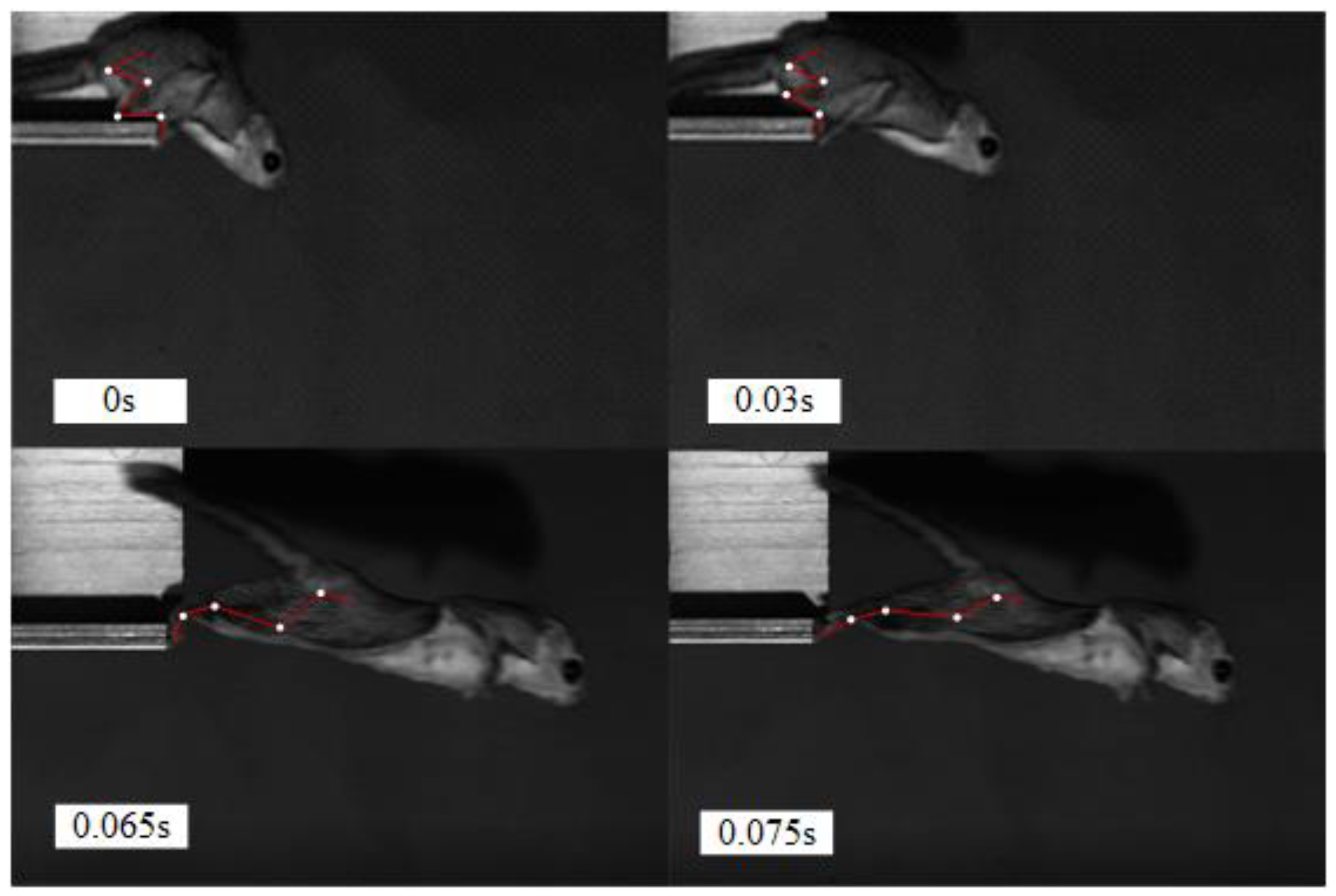
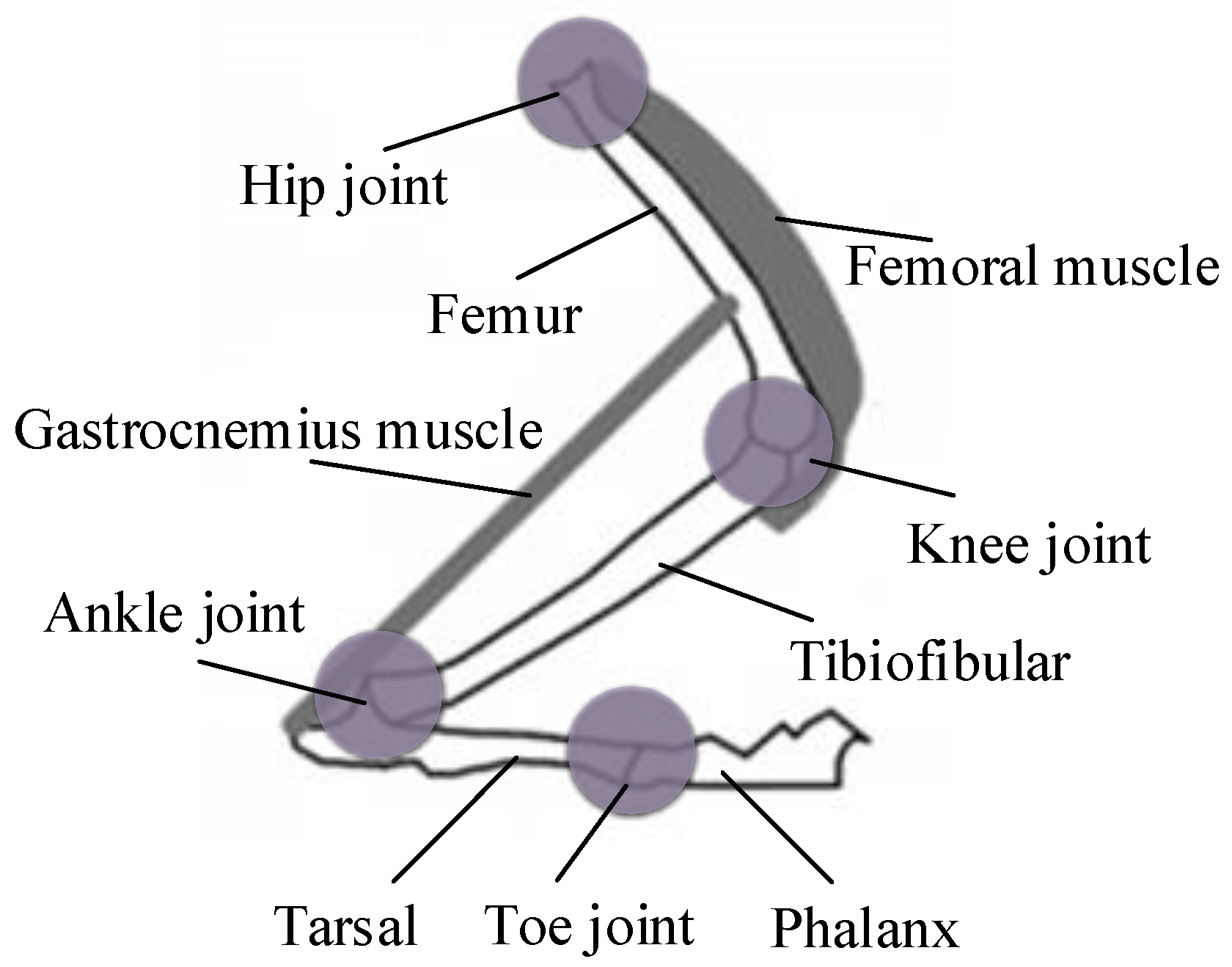
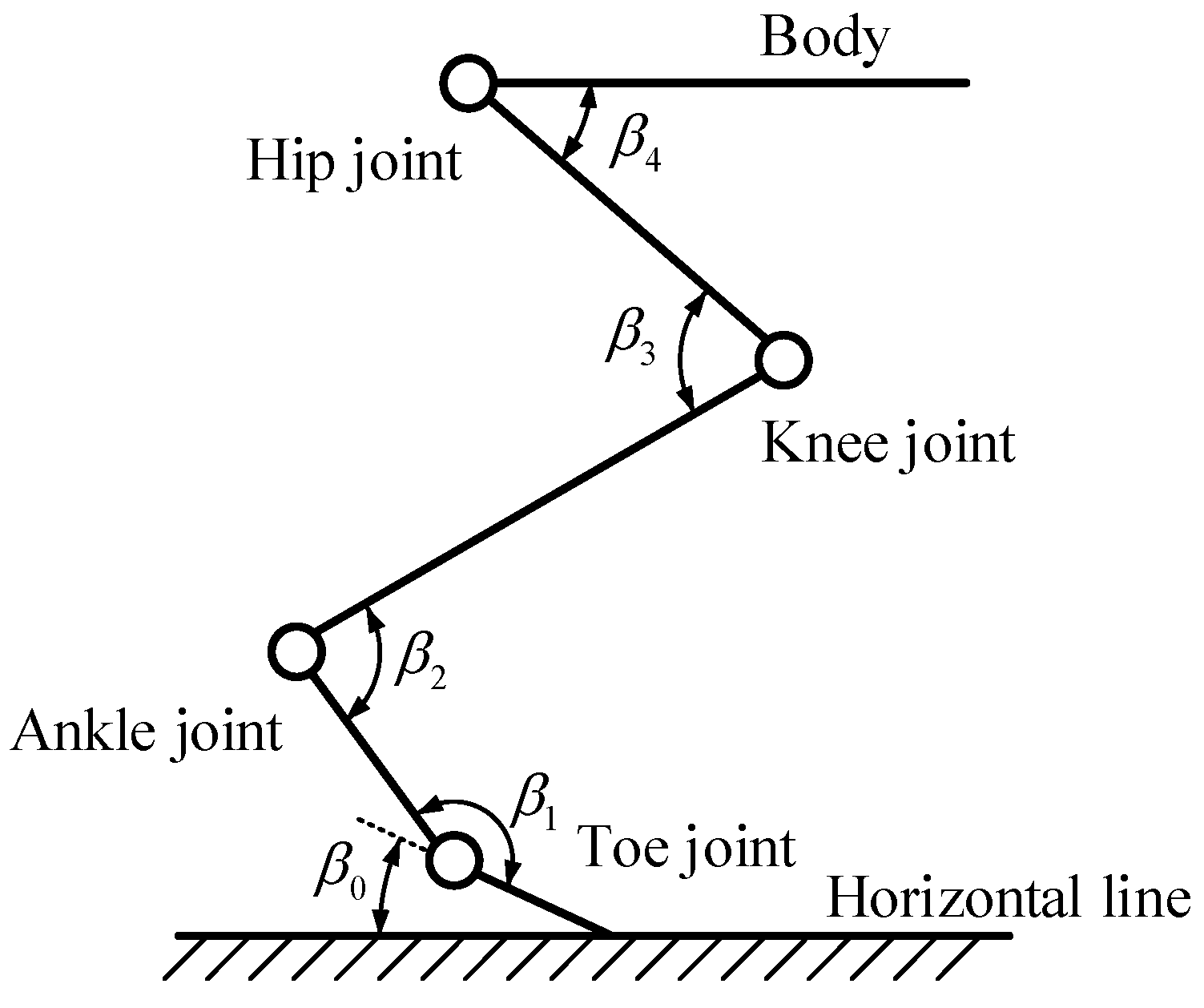
3. Analysis of Jumping Mechanism of Flying Squirrel
4. Design of Jumping Robot
4.1. Hind Limbs
4.2. The Mechanism of Loading and Releasing of Spring
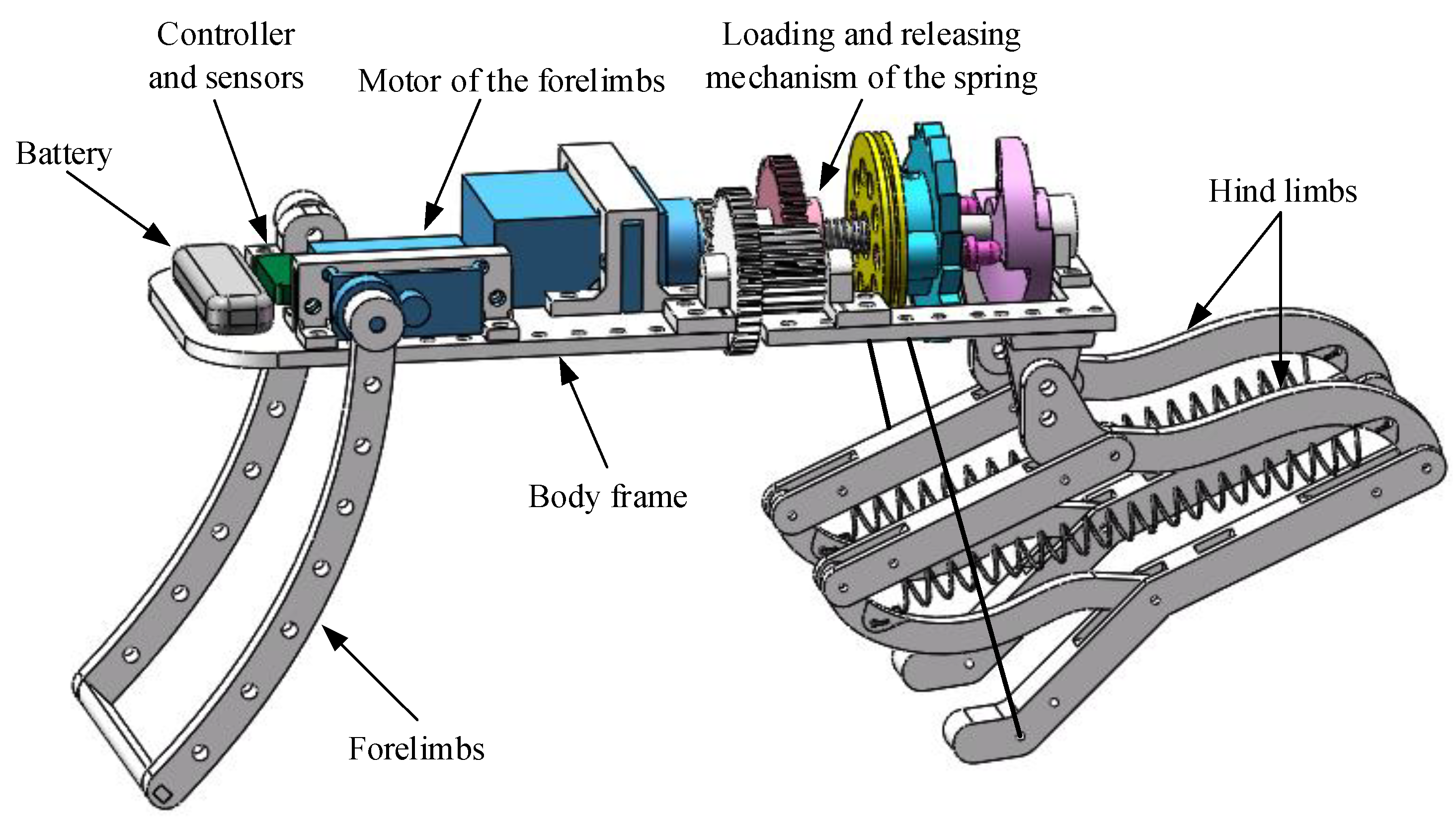
4.3. Forelimbs and Overall Structure
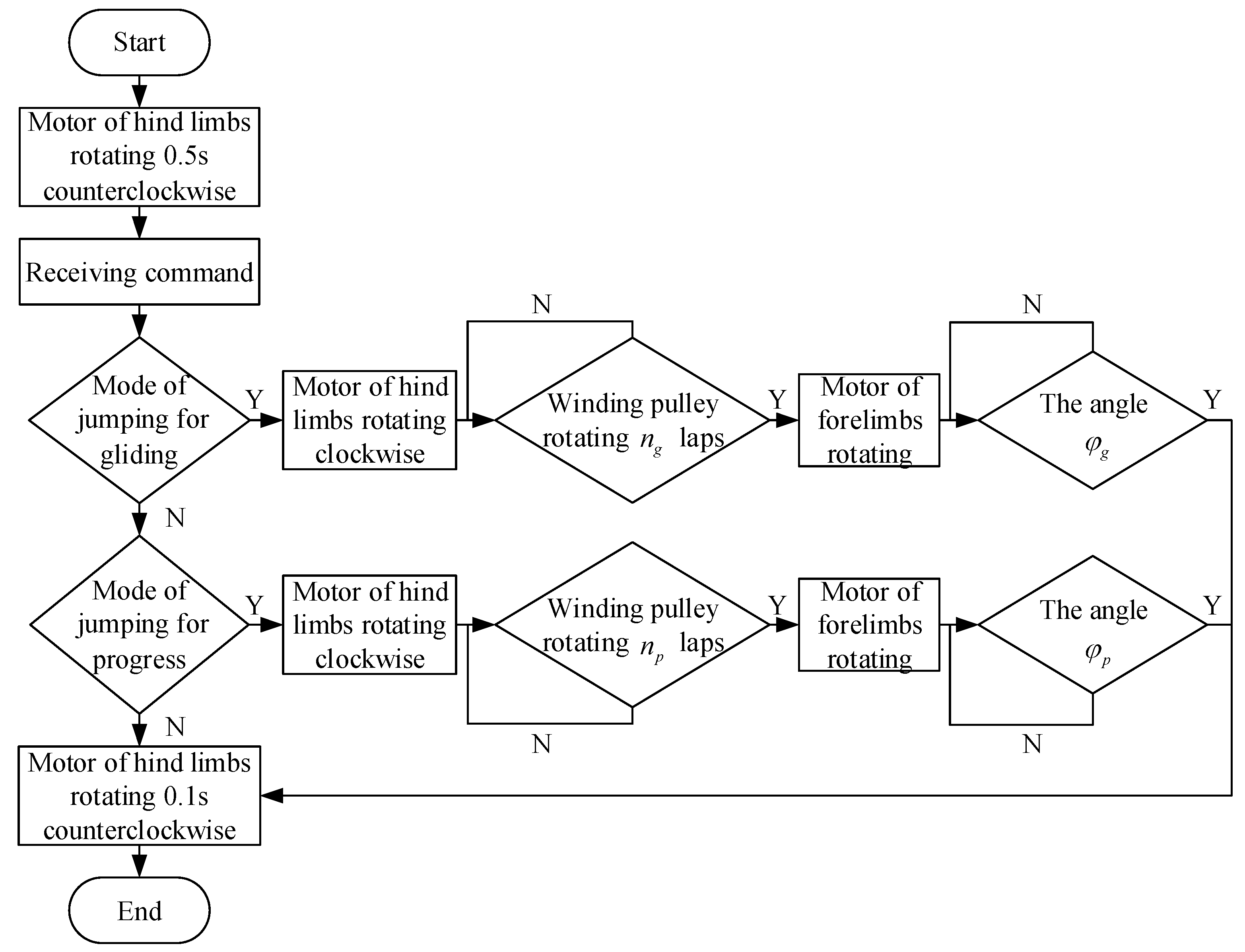
4.4. The Working Process
5. Pitching Requirement and Adjustment
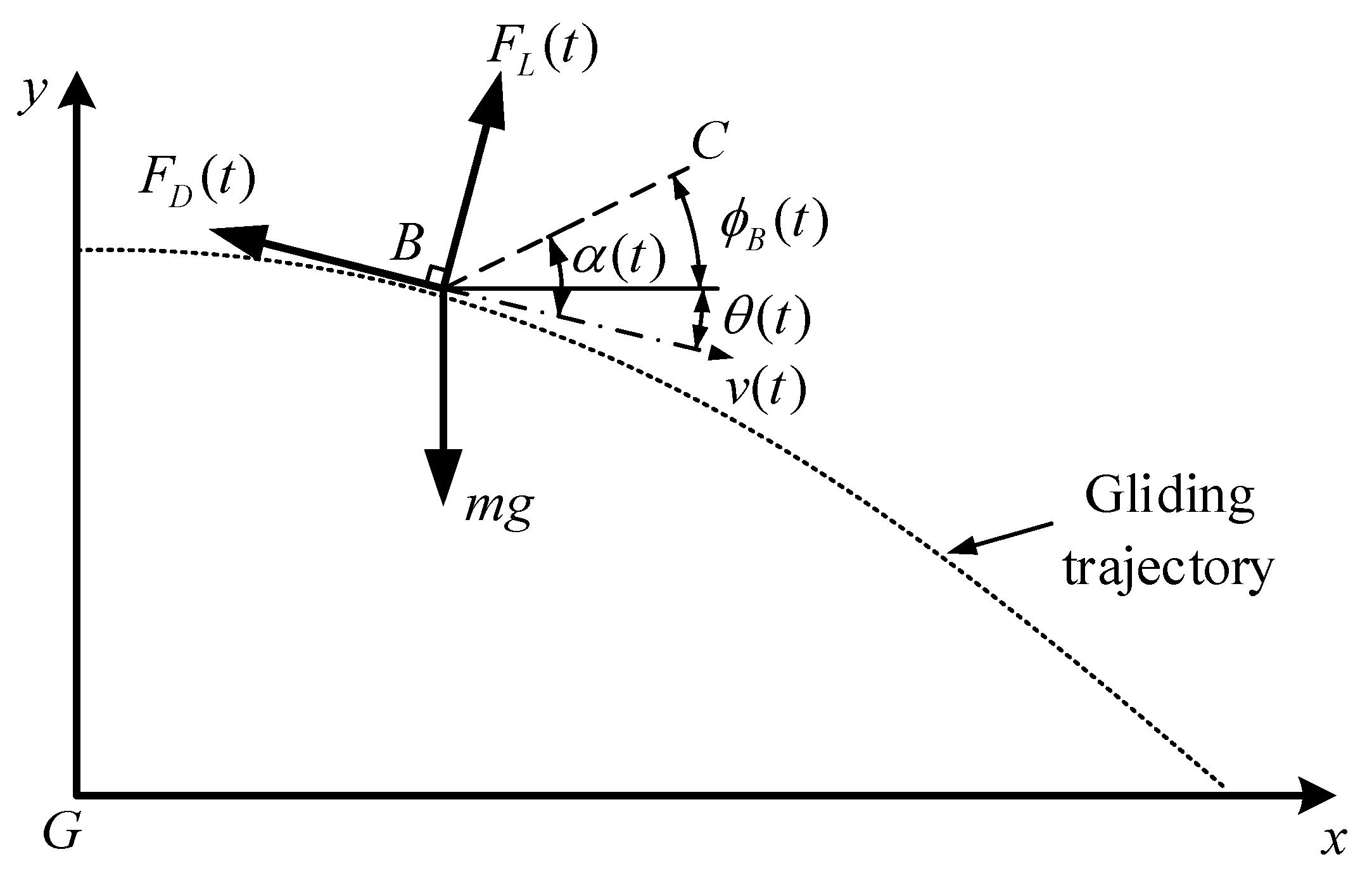
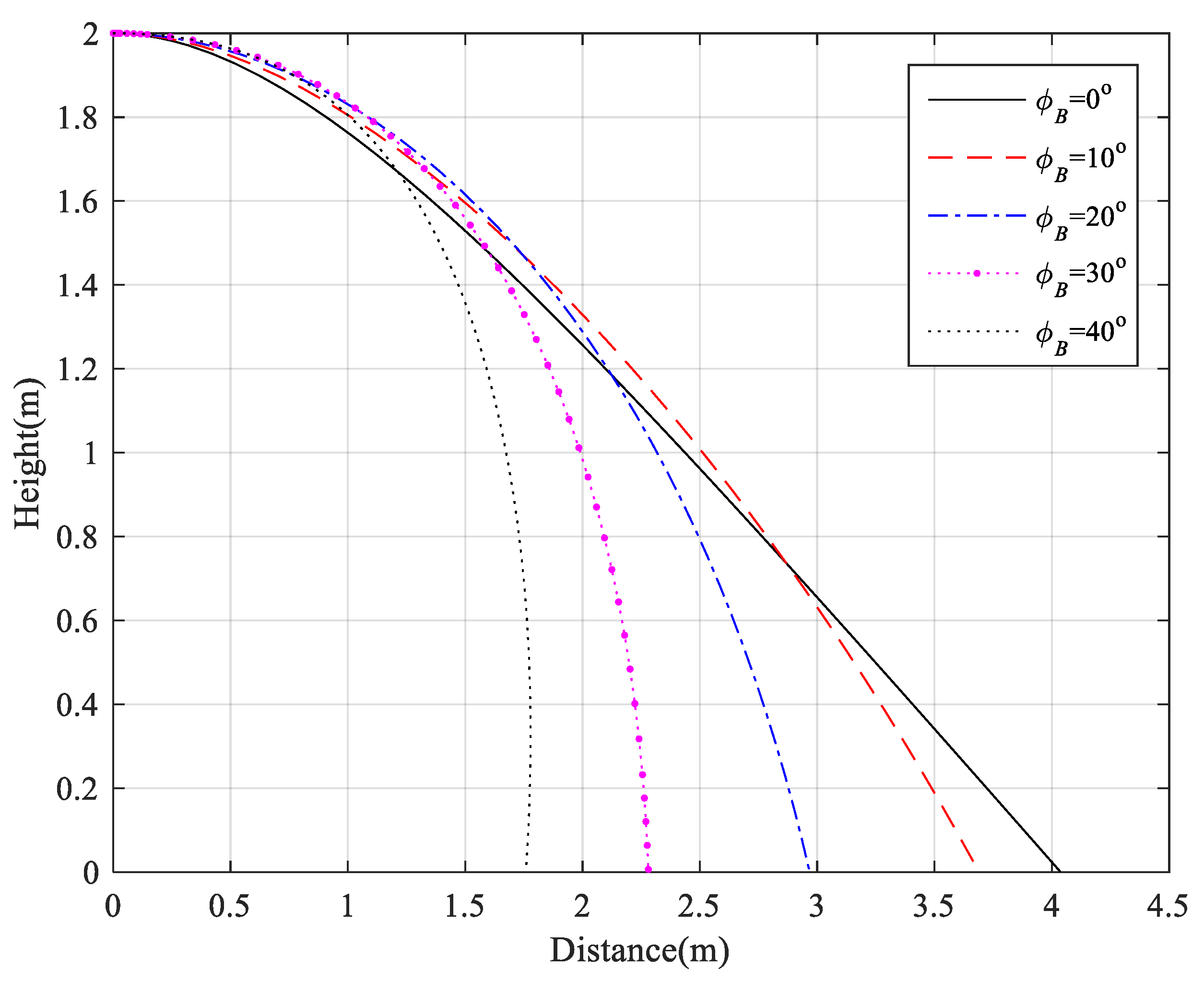
5.1. Pitching Requirement
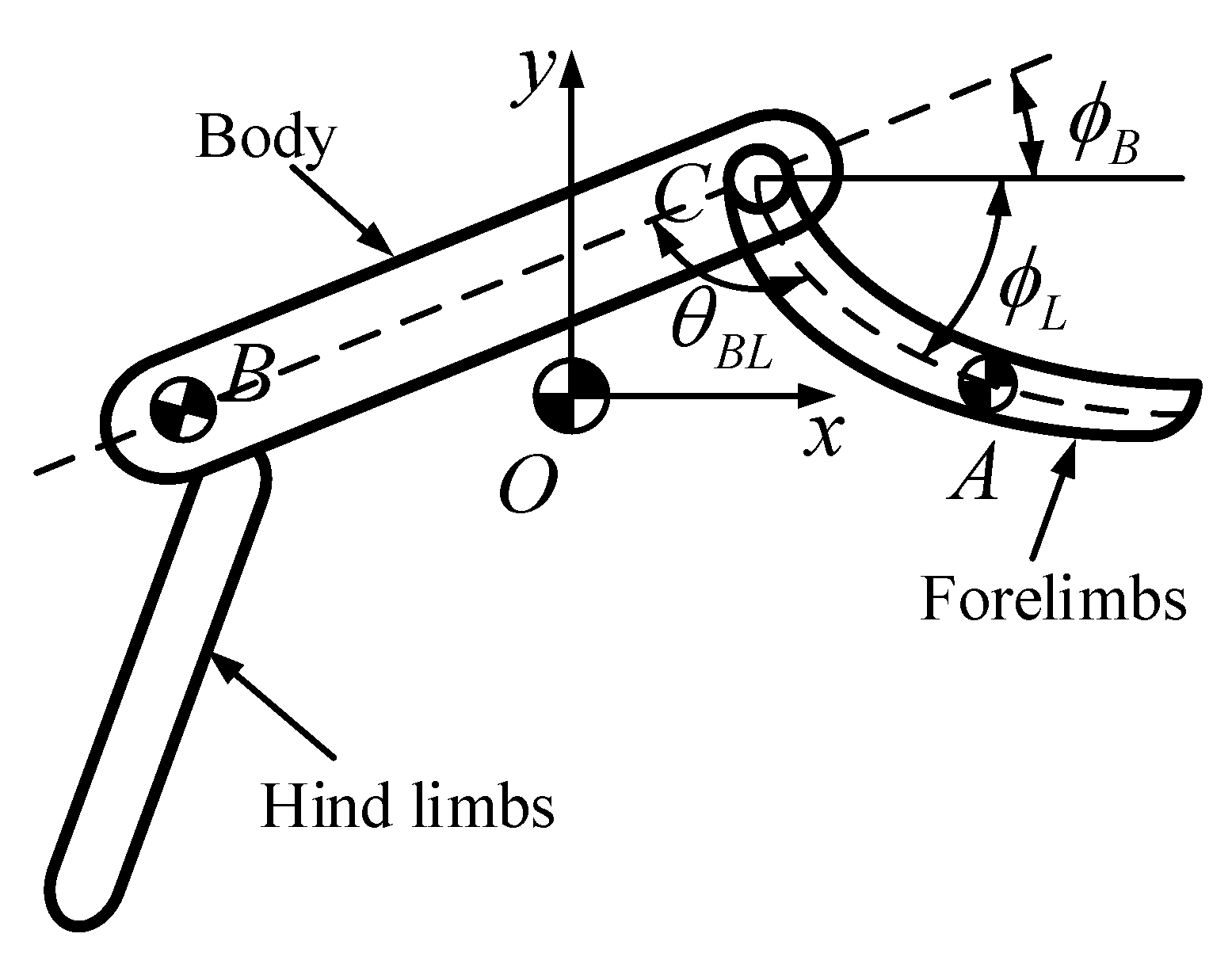
5.2. Pitching Adjustment
5.2.1. Dynamic Model
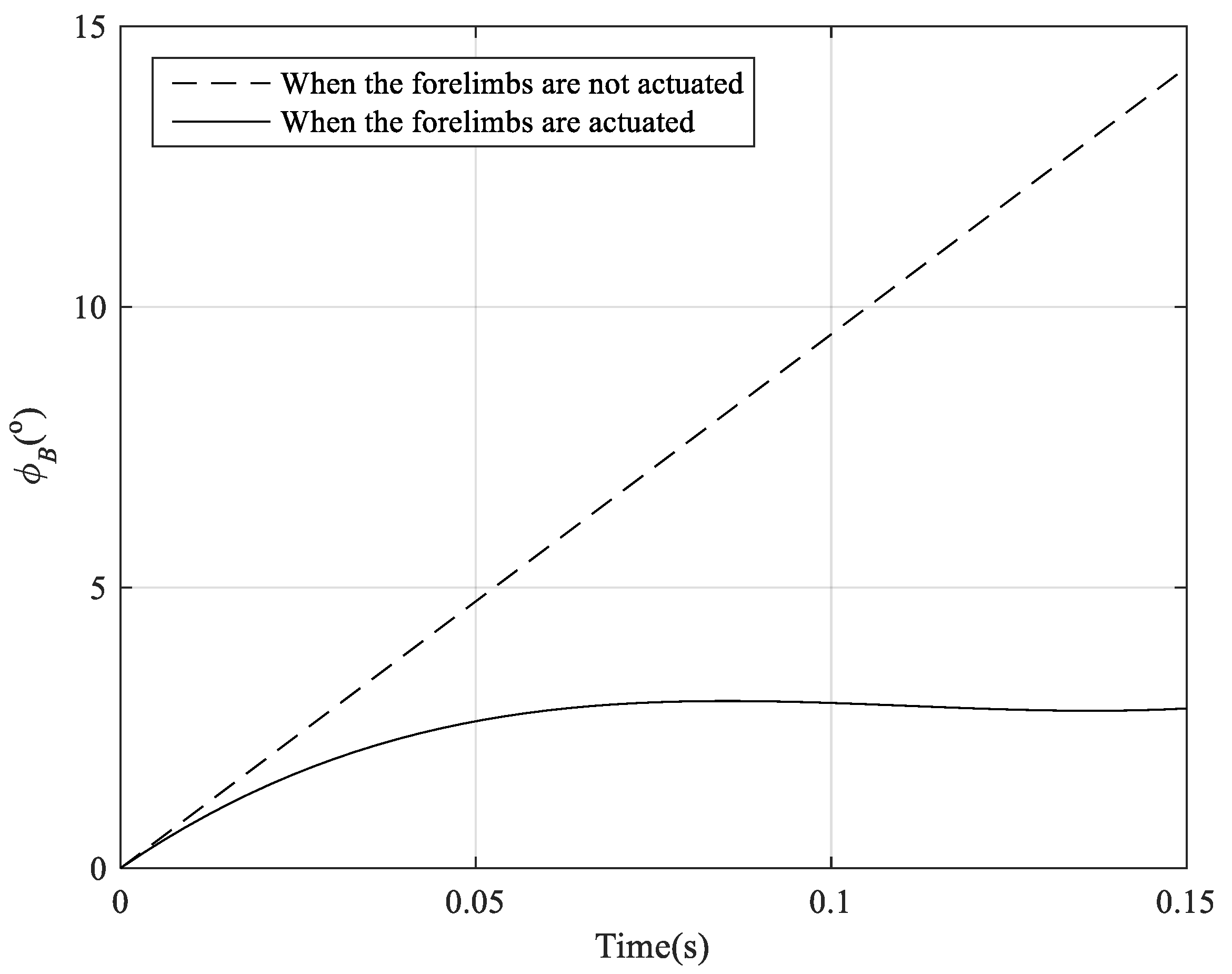
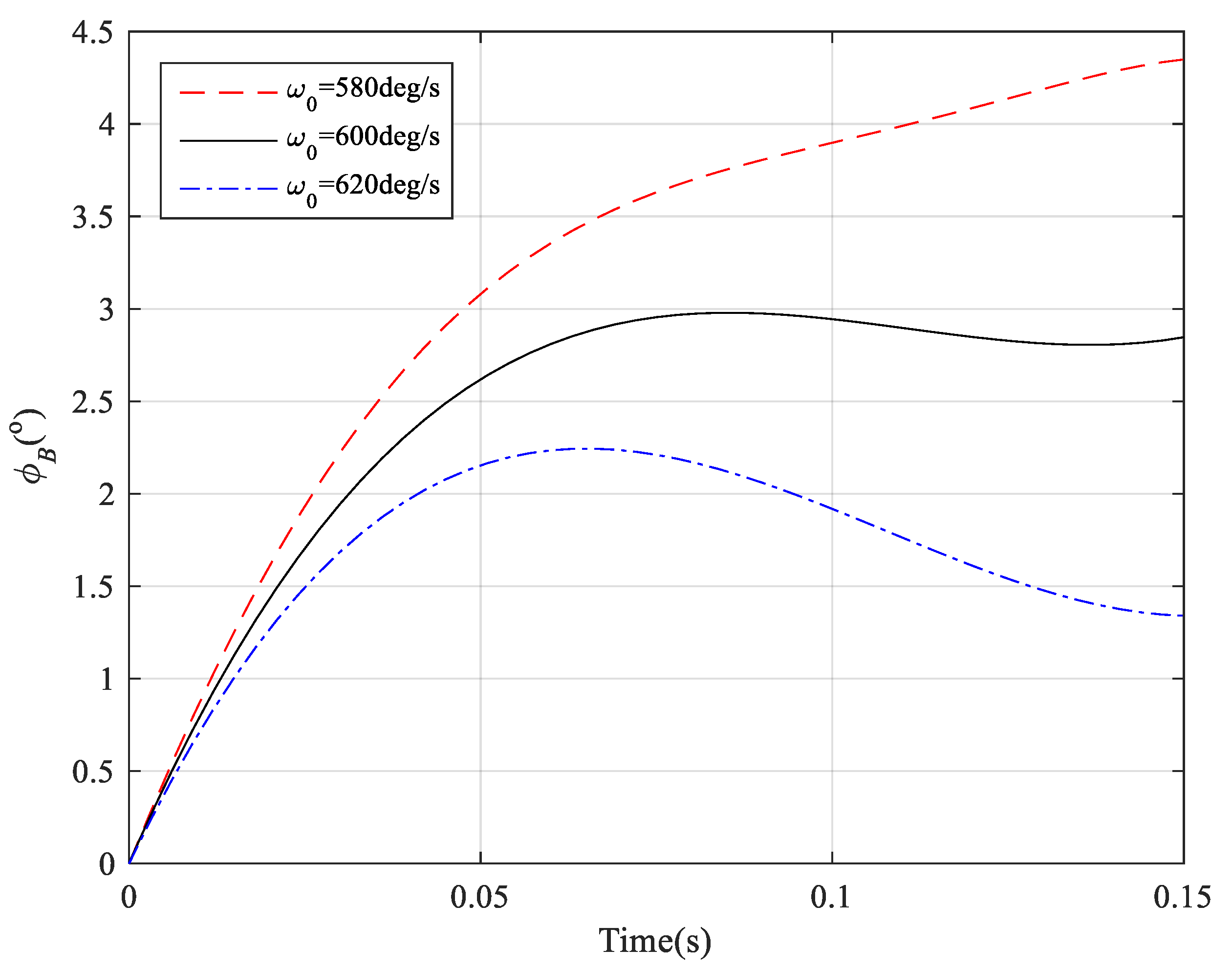
5.2.2. Numerical Simulation
6. Prototype and Experiment
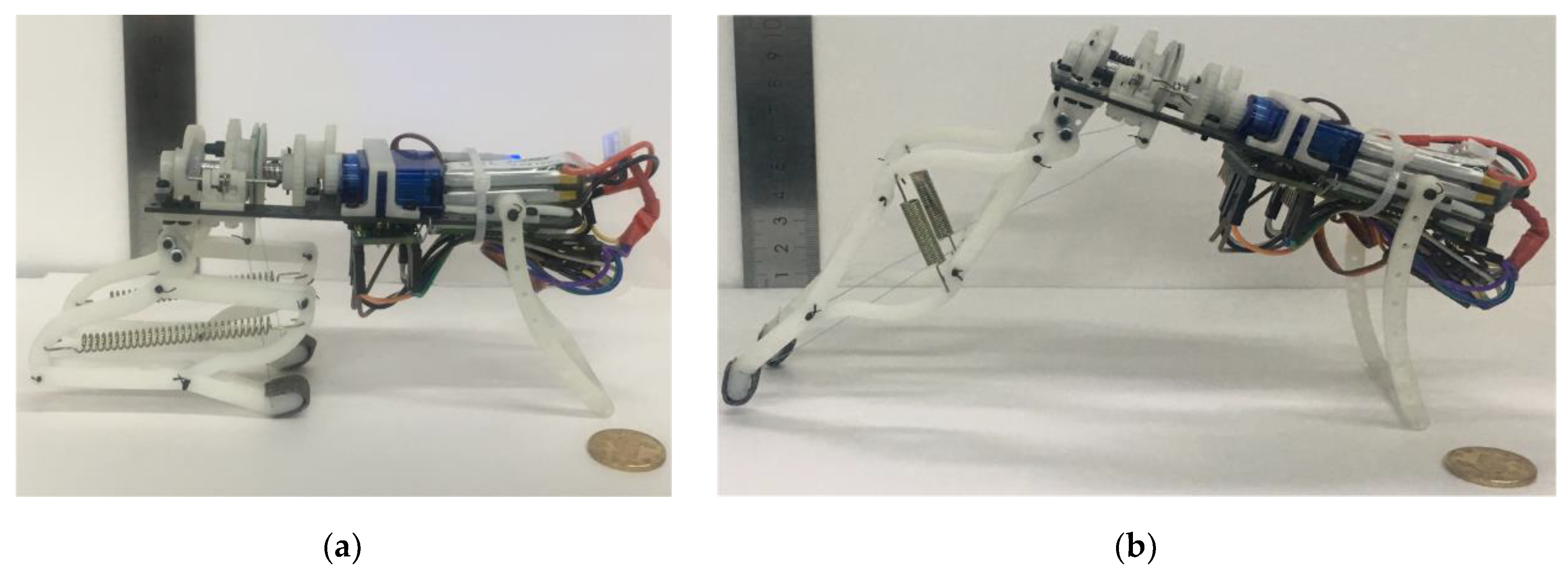
6.1. Prototype Manufacture
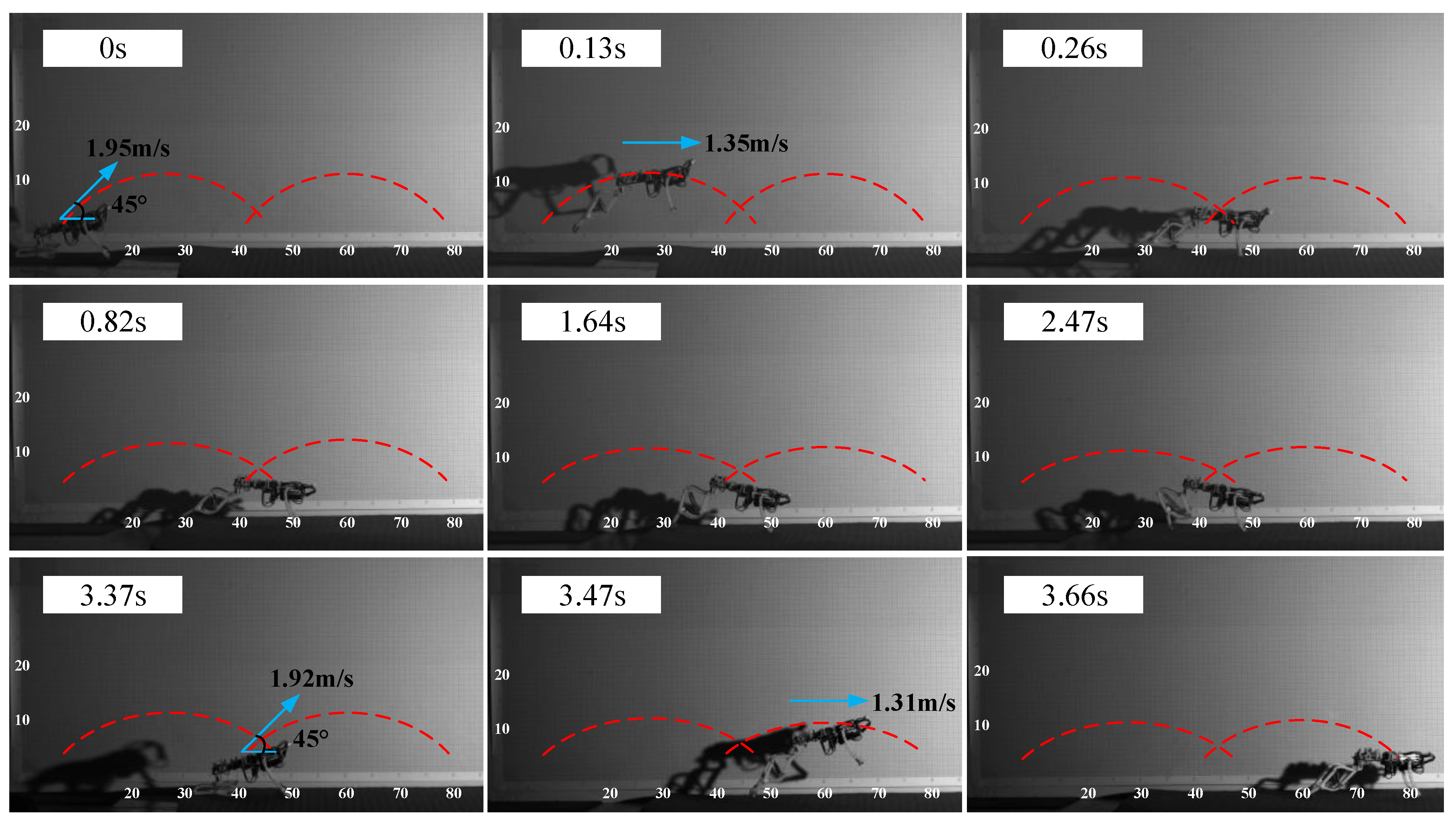
6.2. Jumping Performance
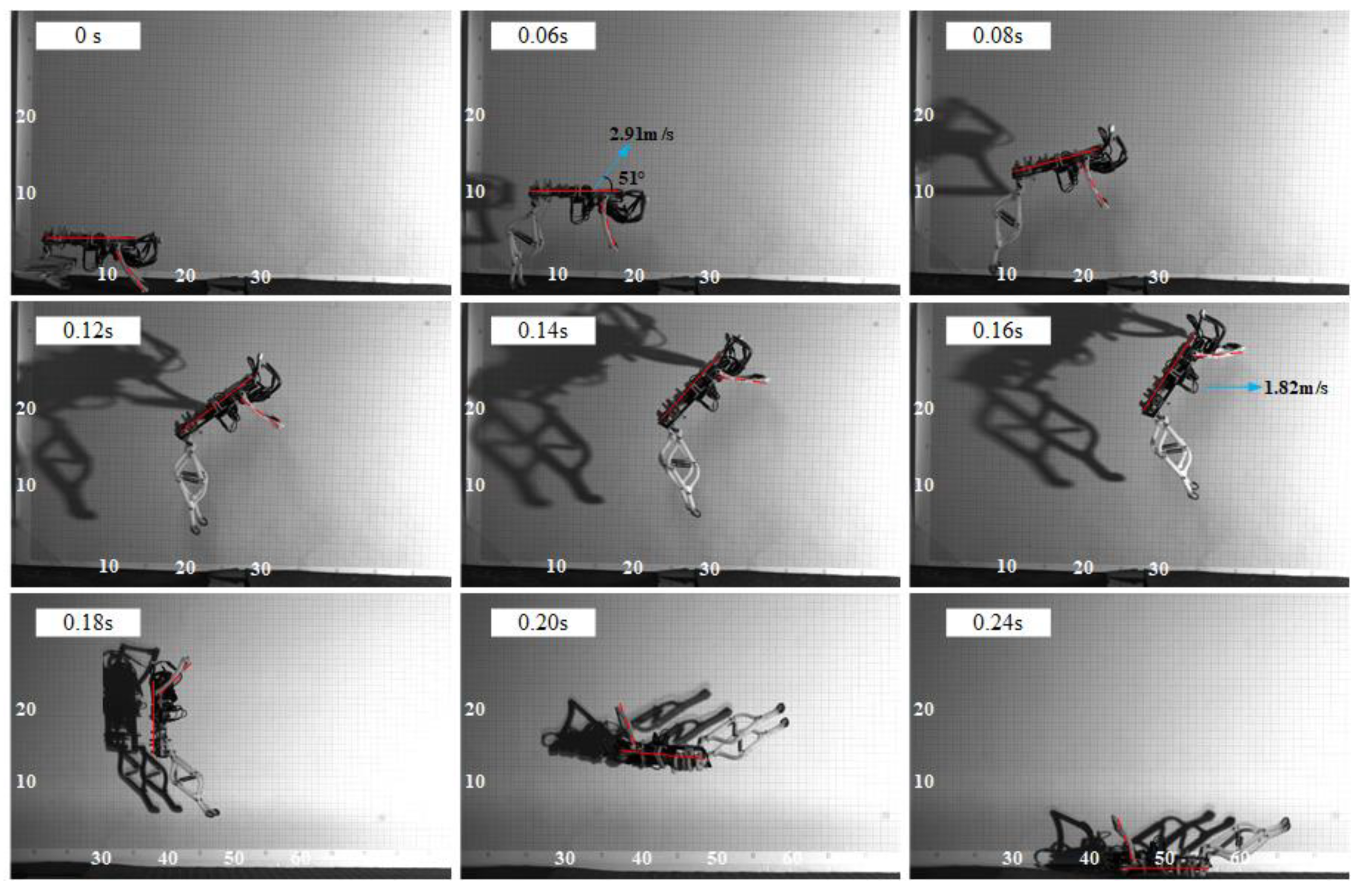
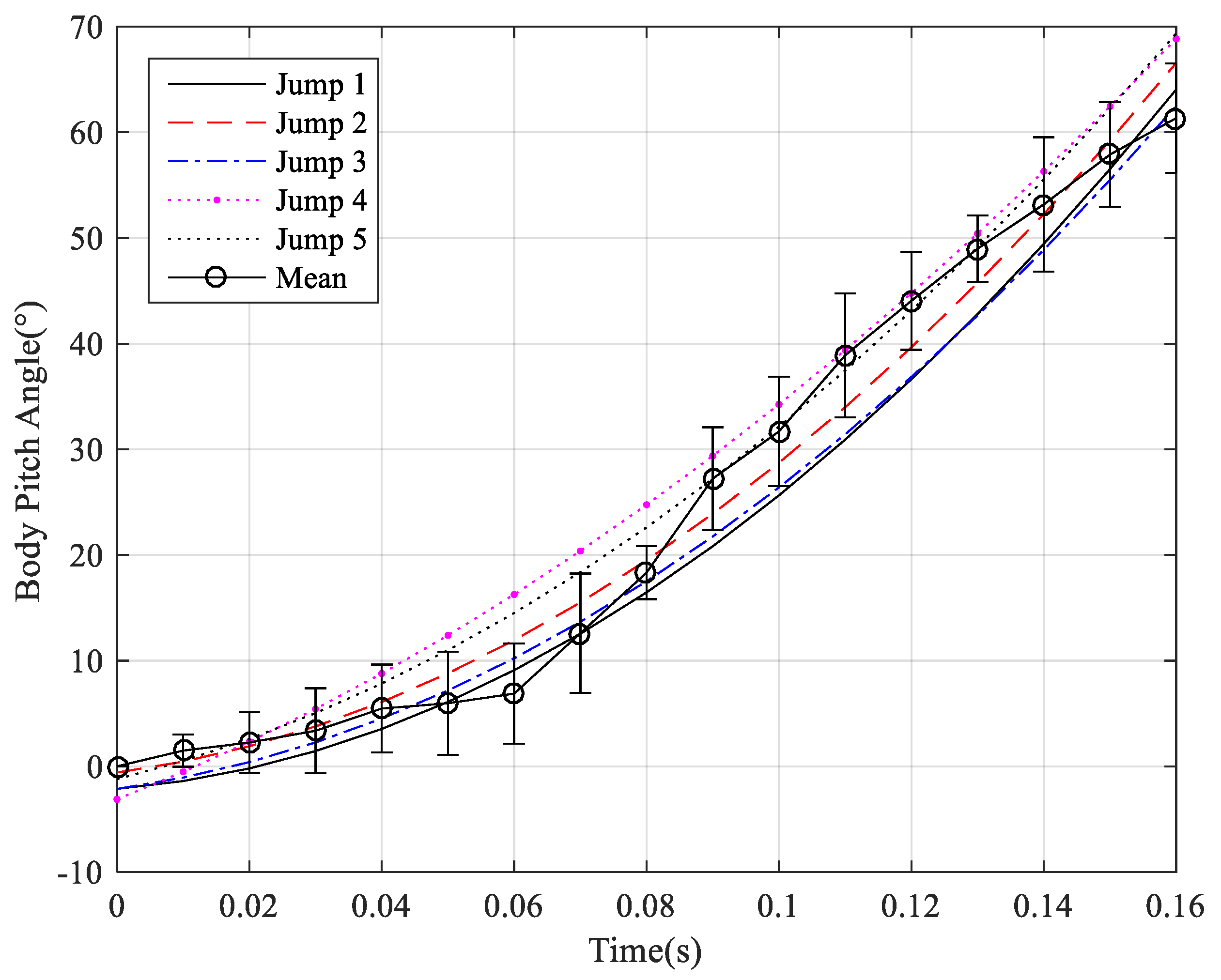
6.2.1. The Mode of Jumping for Gliding
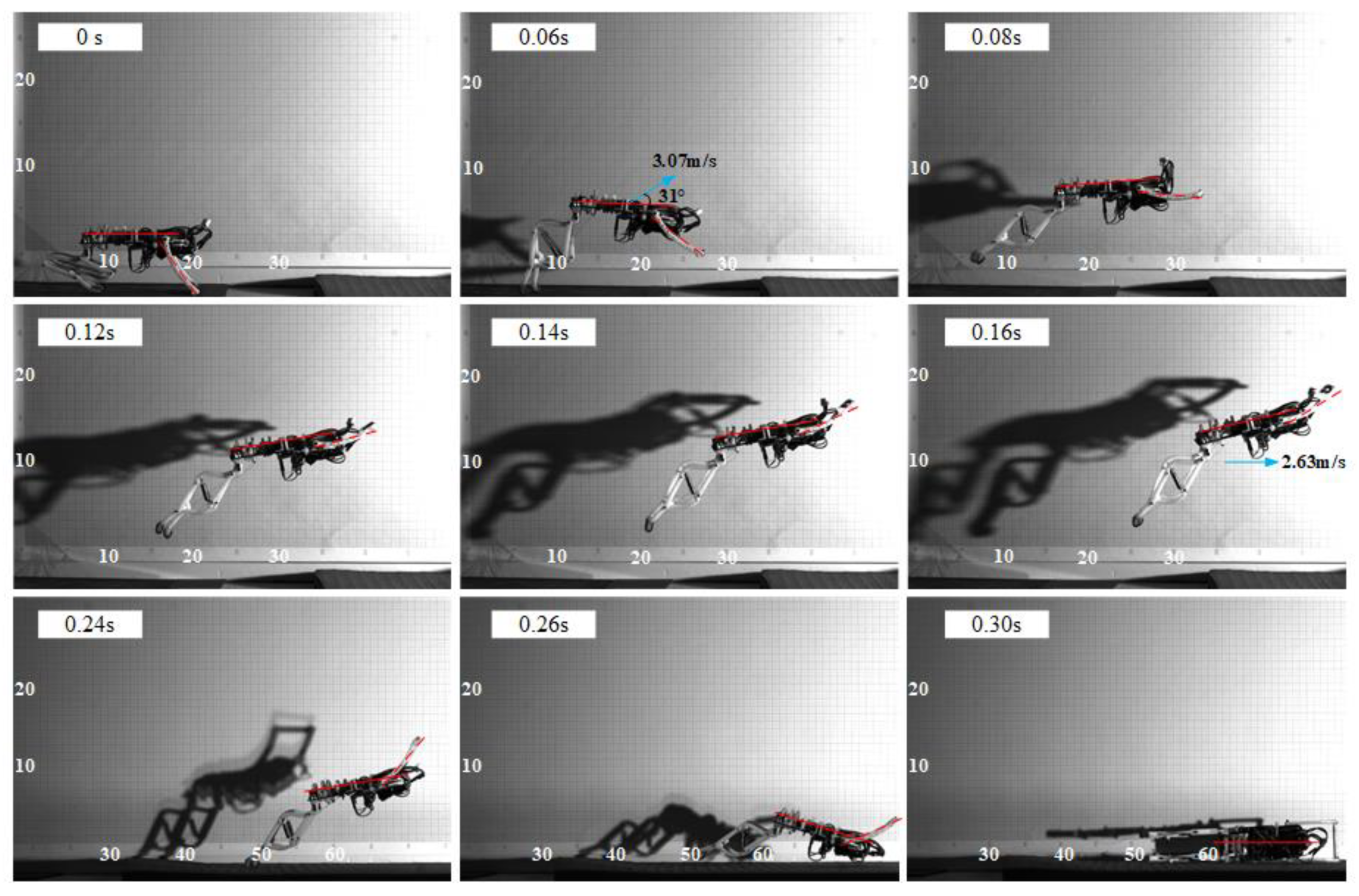
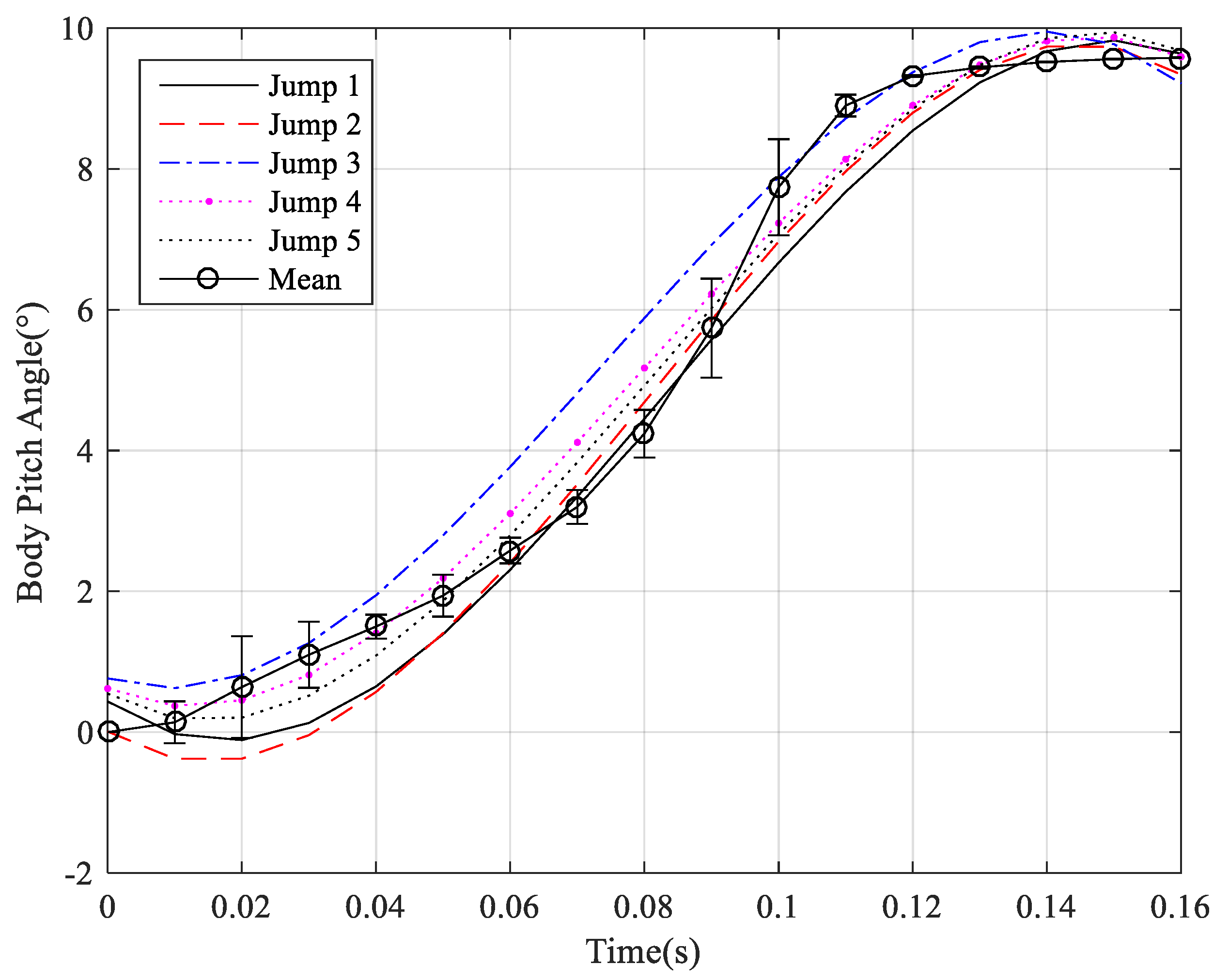
6.2.2. The Mode of Jumping for Progress
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Motor Gear | Gear 1 | Gear 2 | Transmission Gear |
|---|---|---|---|---|
| Number of teeth | 20 | 40 | 20 | 40 |
| Module (mm) | 0.5 | 0.5 | 0.5 | 0.5 |
| Pressure angle (°) | 20 | 20 | 20 | 20 |
References
- Tadokoro, S. Rescue Robotics: DDT Project on Robots and Systems for Urban Search and Rescue; Springer: London, UK, 2009. [Google Scholar]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Fukushima, M.; et al. Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots. J. Field Robot. 2012, 30, 44–63. [Google Scholar] [CrossRef]
- Armour, R.; Paskins, K.; Bowyer, A.; Vincent, J.; Megill, W. Jumping robots: A biomimetic solution to locomotion across rough terrain. Bioinspir. Biomim. 2007, 2, S65–S82. [Google Scholar] [CrossRef] [Green Version]
- Armour, R.H. A Biologically Inspired Jumping and Rolling Robot; University of Bath: Bath, UK, 2010. [Google Scholar]
- Desbiens, A.; Pope, M.; Berg, F. Efficient jumpgliding: Theoryand design considerations. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Desbiens, A.L.; Pope, M.T.; Christensen, D.L.; Hawkes, E.W.; Cutkosky, M.R. Design principles for efficient, repeated jumpgliding. Bioinspir. Biomim. 2014, 9, 025009. [Google Scholar] [CrossRef] [PubMed]
- Kovac, M.; Hraiz, W.; Fauria, O.; Zufferey, J.-C.; Floreano, D. The EPFL jumpglider: A hybrid jumping and gliding robot with rigid or folding wings. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 1503–1508. [Google Scholar]
- Vidyasagar, A.; Zufferey, J.; Floreano, D.; Kovač, M. Performance analysis of jump-gliding locomotion for miniature robotics. Bioinspir. Biomim. 2015, 10, 025006. [Google Scholar] [CrossRef] [PubMed]
- Kovac, M.; Fuchs, M.; Guignard, A.; Zufferey, J.-C.; Floreano, D. A miniature 7g jumping robot. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 373–378. [Google Scholar]
- Woodward, M.; Sitti, M. MultiMo-Bat: A biologically inspired integrated jumping–gliding robot. Int. J. Robot. Res. 2014, 33, 1511–1529. [Google Scholar] [CrossRef]
- Beck, A.; Hanan, M.Z. A Jumper-glider bio-robot inspired by the locust. Robotics 2016, 1. [Google Scholar] [CrossRef]
- Beck, A.; Zaitsev, V.; Ben Hanan, U.; Kosa, G.; Ayali, A.; Weiss, A. Jump stabilization and landing control by wing-spreading of a locust-inspired jumper. Bioinspir. Biomim. 2017, 12, 066006. [Google Scholar] [CrossRef]
- Zaytsev, V.; Gvirsman, O.; Hanan, U. A locust-inspired miniature jumping robot. Bioinspir. Biomim. 2015, 10, 66012. [Google Scholar] [CrossRef] [PubMed]
- Xiaojuan, M.; Wenjie, G.; Donglai, Z.; Dunwen, W. Review: Research Status of Miniature Jumping Robot. Chin. J. Mech. Eng. 2019, 55, 109–123. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Zhao, J.; Chen, H.; Chen, D. A Survey of Bioinspired Jumping Robot: Takeoff, Air Posture Adjustment, and Landing Buffer. Appl. Bionics Biomech. 2017, 2017, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Jungg, P.; Casarezc, S.; Jungs, P. An integrated jumping-crawling robot using height-adjustable jumping module. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 4680–4685. [Google Scholar]
- Loepfe, M.; Schumacher, C.M.; Lustenberger, U.B. An untethered, jumping roly-poly soft robot driven by combustion. Soft Robot. 2015, 2, 33–41. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nat. Cell Biol. 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Sugiyama, Y.; Hirai, S. Crawling and Jumping by a Deformable Robot. Int. J. Robot. Res. 2006, 25, 603–620. [Google Scholar] [CrossRef]
- Chai, H.; Li, J.; Wenjie, G.E. Gait analysis on bionic kangaroo-hopping robot based on adjustable geared five-linkage mechanism. Robot 2009, 31, 487–492. [Google Scholar]
- Zhang, J.; Song, G.; Li, Y.; Qiao, G.; Song, A.; Wang, A. A bio-inspired jumping robot: Modeling, simulation, design, and experimental results. Mechatronics 2013, 23, 1123–1140. [Google Scholar] [CrossRef]
- Fiorini, P.; Burdick, J. The Development of Hopping Capabilities for Small Robots. Auton. Robot. 2003, 14, 239–254. [Google Scholar] [CrossRef]
- Miao, Z.; Mo, J.; Li, G.; Ning, Y.; Li, B. Wheeled hopping robot with combustion-powered actuator. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Libby, T.; Moore, T.Y.; Chang-Siu, E.; Li, D.; Cohen, D.J.; Jusufi, A.; Full, R.J. Tail-assisted pitch control in lizards, robots and dinosaurs. Nat. Cell Biol. 2012, 481, 181–184. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, T.; Xi, N.; Cintron, F.J.; Mutka, M.W.; Xiao, L. Controlling aerial maneuvering of a miniature jumping robot using its tail. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3802–3807. [Google Scholar]
- Zhao, J.; Zhao, T.; Xi, N.; Mutka, M.W.; Xiao, L. MSU Tailbot: Controlling Aerial Maneuver of a Miniature-Tailed Jumping Robot. IEEE/ASME Trans. Mechatron. 2015, 20, 2903–2914. [Google Scholar] [CrossRef]
- Liu, G.-H.; Lin, H.-Y.; Lin, H.-Y.; Chen, S.-T.; Lin, P.-C. A Bio-Inspired Hopping Kangaroo Robot with an Active Tail. J. Bionic Eng. 2014, 11, 541–555. [Google Scholar] [CrossRef]
- Essner, R.L. Three-dimensional launch kinematics in leaping, parachuting and gliding squirrels. J. Exp. Biol. 2002, 205, 2469–2477. [Google Scholar]
- Stafford, B.J.; Thorington, R.W.; Kawamichi, T. Positional behavior of Japanese giant flying squirrels (Petaurista leucogenys). J. Mammal. 2003, 84, 263–271. [Google Scholar] [CrossRef]
- Thorington, R.W.; Darrow, K.; Anderson, C.G. Wing Tip Anatomy and Aerodynamics in Flying Squirrels. J. Mammal. 1998, 79, 245–250. [Google Scholar] [CrossRef] [Green Version]
- Socha, J.J.; Jafari, F.; Munk, Y.; Byrnes, G. How animals glide: From trajectory to morphology. Can. J. Zool. 2015, 93, 901–924. [Google Scholar] [CrossRef]
- Ando, M.; Shiraishi, S. Gliding Flight in the Japanese giant flying squirrel Petaurista leucogenys. J. Mammal. Soc. Jpn. 1993, 18, 19–32. [Google Scholar]
- Vernes, K. Gliding performance of the northern flying squirrel (Glaucomys sabrinus) in mature mixed forest of eastern Canada. J. Mammal. 2001, 82, 1026–1033. [Google Scholar] [CrossRef] [Green Version]
- Bishop, K.L. The relationship between 3-D kinematics and gliding performance in the southern flying squirrel, Glaucomys volans. J. Exp. Biol. 2006, 209, 689–701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bahlman, J.W.; Swartz, S.M.; Riskin, D.K.; Breuer, K.S. Glide performance and aerodynamics of non-equilibrium glides in northern flying squirrels (Glaucomys sabrinus). J. R. Soc. Interface 2013, 10, 20120794. [Google Scholar] [CrossRef] [Green Version]
- Yeaton, I.J.; Socha, J.J.; Ross, S.D. Global dynamics of non-equilibrium gliding in animals. Bioinspir. Biomim. 2017, 12, 026013. [Google Scholar] [CrossRef] [Green Version]
- Paskins, K.E.; Bowyer, A.; Megill, W.M. Take-off and landing forces and the evolution of controlled gliding in northern flying squirrels Glaucomys sabrinus. J. Exp. Biol. 2007, 210, 1413–1423. [Google Scholar] [CrossRef] [Green Version]
- Chickering, J.G.; Sokoloff, A.J. Innervation of propatagial musculature in a flying squirrel, Glaucomys volans (Rodentia, Sciuridae). Brain Behav. Evol. 1996, 47, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Jackson, S.M. Glide angle in the genus Petaurus and a review of gliding in mammals. Mammal Rev. 2000, 30, 9–30. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, B.; Yin, L. Research on Jumping Mechanism and Bionic Design Based on Characteristics of Squirrel Leg. Mech. Res. Appl. 2018, 31, 158–162. [Google Scholar]
- Tangler, J.L.; Kocurek, J.D. Wind Turbine Post-Stall Airfoil Performance Characteristics Guidelines for Blade-Element Mo-mentum Methods. Power 2005, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Zhao, F.; Wang, W.; Zhang, J.; Wyrwa, J.; Sun, F. Aerodynamic Characteristics and Pitching Adjusting Mechanism of the Flying Squirrel with Deployed Patagium. IEEE Access 2019, 7, 185554–185564. [Google Scholar] [CrossRef]
- Shampine, L.F.; Gladwell, I.; Thompson, S. Solving ODEs with Matlab; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]




| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 0.07 kg | 0.01 kg | ||
| 0.03 m | 0.06 m | ||
| 6.3 × 10−5 kg·m2 | 3.6 × 10−5 kg·m2 | ||
| 0.15 N·m | 600 deg/s | ||
| 8.5 × 10−4 kg·m2/s | 0° | ||
| 90° | −90° |
| Components | Material | Weight (gr) |
|---|---|---|
| Body frame | Carbon fiber | 13 |
| Cam, Gears, Brackets | Photosensitive resin | 10.5 |
| Transmission shaft | Aluminum alloy | 4.2 |
| Limbs | Photosensitive resin | 14 |
| Springs | Steel | 2.1 |
| Controller and sensors | - | 17.2 |
| Motors | - | 12 |
| Battery | - | 10 |
| Total weight | 83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, F.; Wang, W.; Wyrwa, J.; Zhang, J.; Du, W.; Zhong, P. Design and Demonstration of a Flying-Squirrel-Inspired Jumping Robot with Two Modes. Appl. Sci. 2021, 11, 3362. https://doi.org/10.3390/app11083362
Zhao F, Wang W, Wyrwa J, Zhang J, Du W, Zhong P. Design and Demonstration of a Flying-Squirrel-Inspired Jumping Robot with Two Modes. Applied Sciences. 2021; 11(8):3362. https://doi.org/10.3390/app11083362
Chicago/Turabian StyleZhao, Fei, Wei Wang, Justyna Wyrwa, Jingtao Zhang, Wenxin Du, and Pengyu Zhong. 2021. "Design and Demonstration of a Flying-Squirrel-Inspired Jumping Robot with Two Modes" Applied Sciences 11, no. 8: 3362. https://doi.org/10.3390/app11083362
APA StyleZhao, F., Wang, W., Wyrwa, J., Zhang, J., Du, W., & Zhong, P. (2021). Design and Demonstration of a Flying-Squirrel-Inspired Jumping Robot with Two Modes. Applied Sciences, 11(8), 3362. https://doi.org/10.3390/app11083362