1. Introduction
Pipelines are widely used in oil and natural gas transportation projects. Now, the total length of pipelines in a single country may have exceeded
km [
1,
2]. However, because pipelines are buried underground for a long time, they may also be corroded [
3], even with the typical corrosion prevention techniques (coating, cathodic protection, etc.) [
4]. Under the effect of stress–strain, corrosion on the pipe wall gradually evolves into defects [
5]. The further development of defects may lead to leakage incidents of the oil or gas, which may cause economic losses and environmental pollution [
6]. Based on a series of nondestructive testing technologies such as magnetic flux leakage (MFL) detection [
7], eddy current testing [
8] and ultrasonic testing [
9], the pipeline inspection gauge (PIG) can be developed to detect and evaluate pipeline defects.
The two most important issues in the nondestructive inspection of pipelines are whether defects present and, if so, where they are located [
10]. The defect localization is mainly divided into two types: active locating method and above-ground tracking method. In the active locating method, the pipeline inspection gauge (PIG) measures its own movement through the instruments it carries. Furthermore, there are two ways to achieve active locating method, the odometer positioning method [
11] and the inertial measurement unit (IMU) method [
12,
13]. However, due to the slip caused by paraffin oil or the mechanical error caused by wear [
10], the positioning error of the odometer can be as high as 10% [
14]. What is worse, owing to cumulative counting, there is a cumulative error in the odometer positioning method [
15]. Similarly, IMU realizes positioning through the integration of acceleration and angular velocity, and inevitably also has an accumulated error, which is 20 cm per 100 m [
16,
17]. The inspection mileage of hundreds of kilometers will accumulate positioning errors of hundreds of meters, which is unacceptable in engineering applications.
Therefore, it is necessary to place above-ground markers (AGM) at regular intervals along the pipeline to communicate with the PIG and correct the accumulated error of the active locating method [
18]. At present, the most commonly used AGMs are based on the magnetic flux leakage signal, which uses the magnetic field leaking from the permanent magnet carried by the MFL–PIG to achieve the positioning of the PIG [
19]. Obviously, it is only applicable to MFL-PIG. The friction between PIG and the pipe wall will generate a self-excited vibration acoustic signal, while the collision between PIG and the pipe weld will generate a transient shock vibration acoustic signal [
20]. Therefore, the MEMS acoustic vector sensors can be used in AGMs to track the PIG [
21,
22]. However, the amplitude of the friction sound is small, which results in a limited propagation distance and a weak anti-interference ability. The amplitude of the collision sound is large, but because of the obstruction of the soil, the specific position of the weld cannot be determined directly on the ground, so the PIG cannot be accurately tracked either [
21].
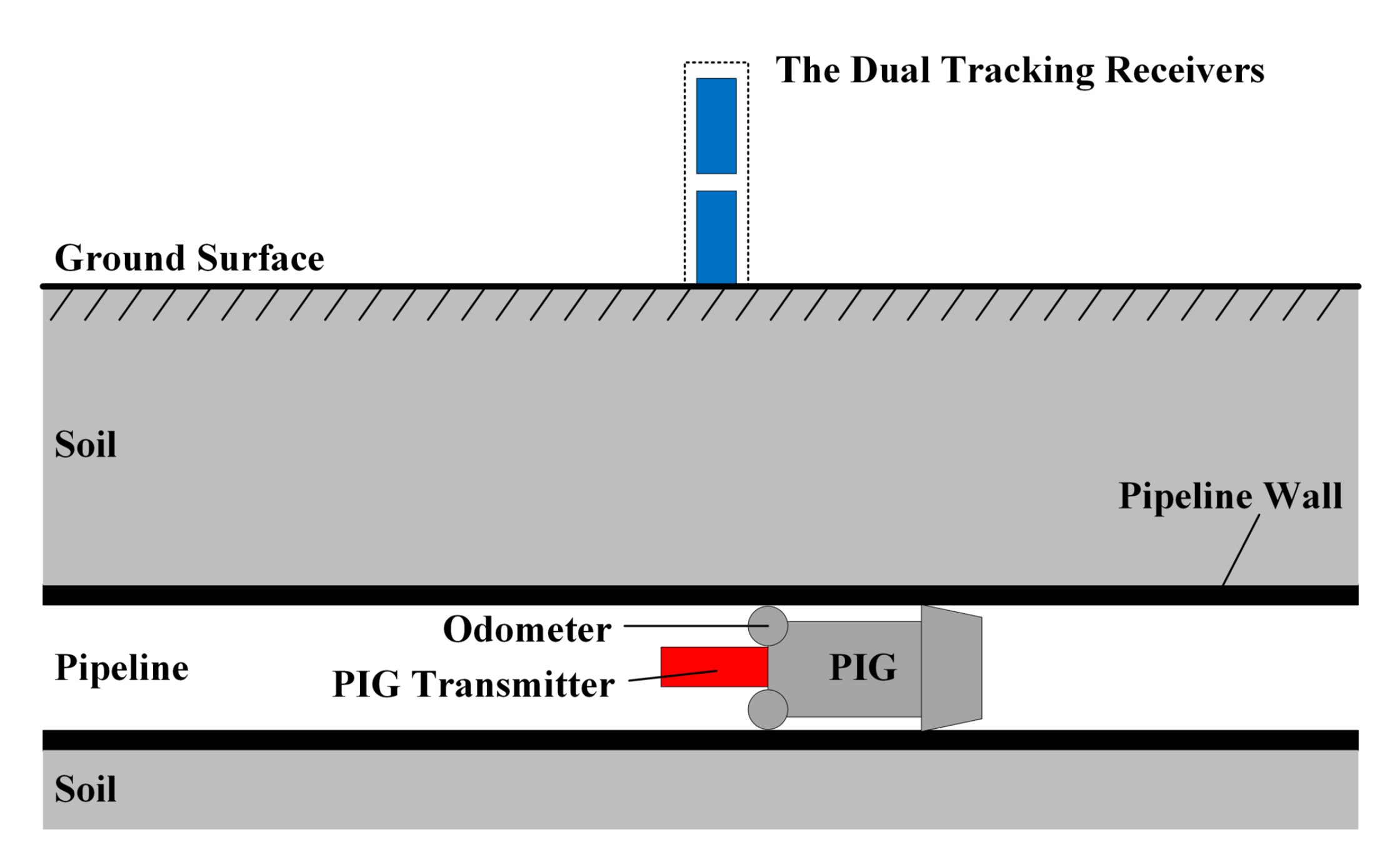
There is also another above-ground tracking method based on an extremely-low frequency (ELF) magnetic field, which has better positioning accuracy and stronger general applicability. PIG carries the transmitter, which can radiate the ELF magnetic field, while the tracking receiver above the ground locates PIG by detecting the ELF magnetic field signal [
23]. The AGM based on the ELF magnetic signal has been widely used in practical engineering [
24]. It is also suitable for tracking the PIG with unconventional shapes [
25]. The most common way to analyze the ELF–AGM is the magnetic dipole model (MDM) method [
26]. Qi established a MDM for the PIG transmitter, and proposed the pipeline global position system to realize long-distance tracking of the pipeline based on the principle of multi-satellite measurement [
27]. Based on the
x-axis and
y-axis signals of the magnetic field of the transmitter, Piao gives an orthogonal search coils model, which is applied to the tracking of high-speed PIGs through the least square criterion and ternary decision trees [
28,
29].
There are three obvious problems with traditional ELF–AGMs. Firstly, the positioning of PIGs has not yet reached centimeter-level accuracy. The positioning error is 40 cm in [
27] and 20 cm in [
30]. Secondly, both Qi [
30] and Piao [
28] measure the ELF magnetic field in the axial and radial direction at the same time, which leads to signal redundancy. Thirdly, the traditional AGMs achieve only one-dimensional tracking for PIG (the axial direction of the pipe). However, the terrain above pipelines may change over time, and the actual location of pipelines may be inconsistent with the initial design [
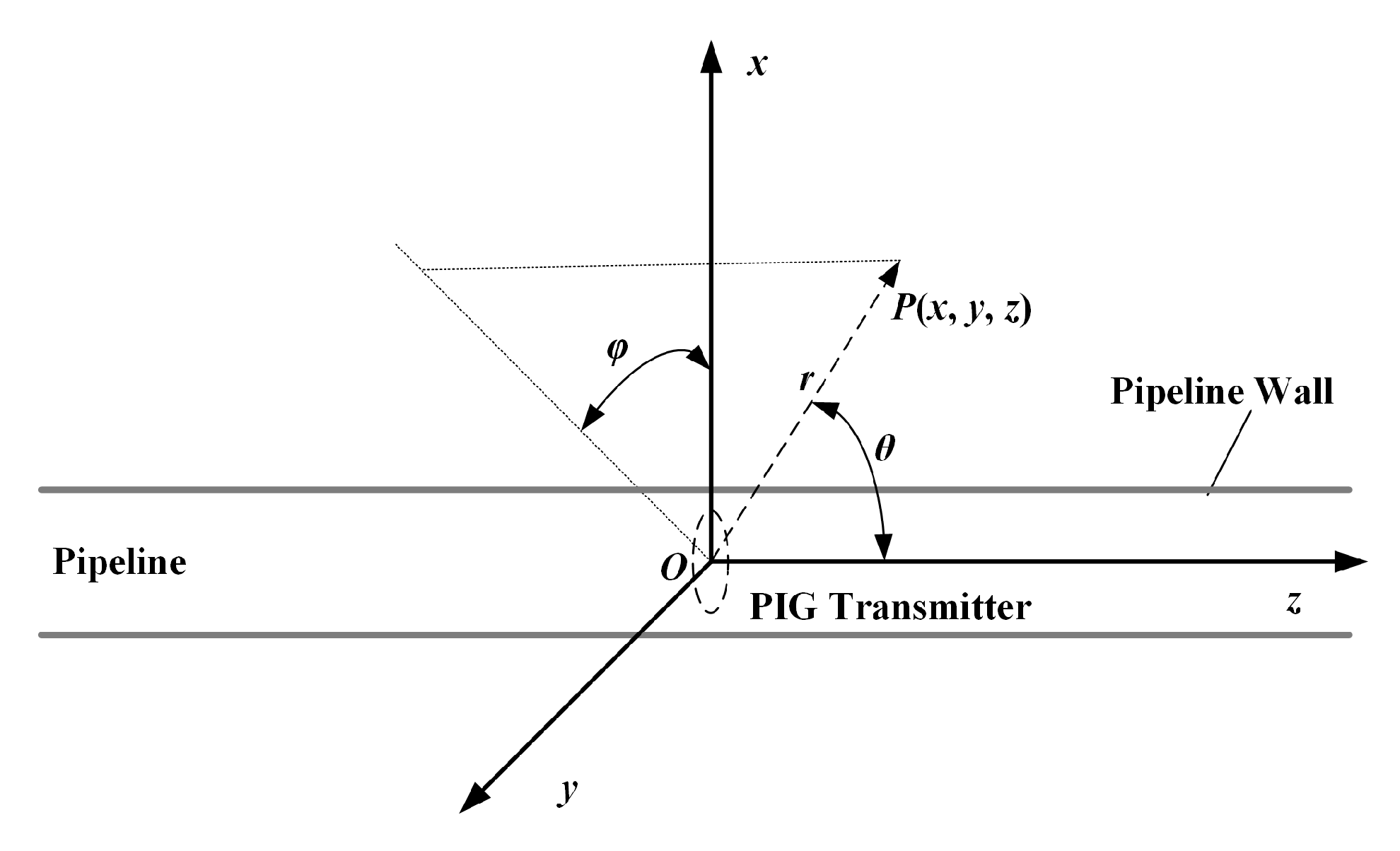
31]. Since the actual location of the underground pipeline is unknown, multiple dimensions tracking is required to accurately describe the location of the pipeline—including the relative position
between the tracking receivers and the PIG, and the pitch angle between the pipeline and the ground plane—in the Cartesian coordinate system with the PIG transmitter as the origin and the direction along the pipeline as the
z-axis. The coordinate
z is used to track the PIG along the pipeline direction. The improvement of the tracking accuracy of the coordinate
z can help to improve the accuracy of the defect location. The coordinate
x is used to position the lateral offset distance between the PIG and the AGM, while the coordinate
y is used to position the vertical distance between the PIG and the AGM, that is, the buried depth of the pipeline. The acquisition of the dimensions
x,
y, and pitch angle can quantify and compensate for their influence on the coordinate
z tracking, which will help improve the robustness of the AGMs and improve the accuracy of defect location. In addition, the accurate lateral offset distance between the AGM and the pipeline obtained from the four-dimensional (4-D) tracking, the actual buried depth of the pipeline, etc., are helpful for the excavation and maintenance of the pipeline. At the same time, 4-D tracking of the pipeline is necessary correction information to compensate for the accumulated errors of the pipeline surveying system [
18,
32]. Qi uses five receiving coils in a horizontal plane to form a receiver array, which has the function of tracking the PIG in multiple dimensions and further improves the tracking accuracy from 40 cm to 20 cm [
30]. However, the tracking of multiple dimensions is not adequately realized in addition to the direction along the pipeline. Furthermore, the receiver array with the five coils on the same horizontal plane is too large to be convenient for field use, which can be seen from the experimental scene in Reference [
30].
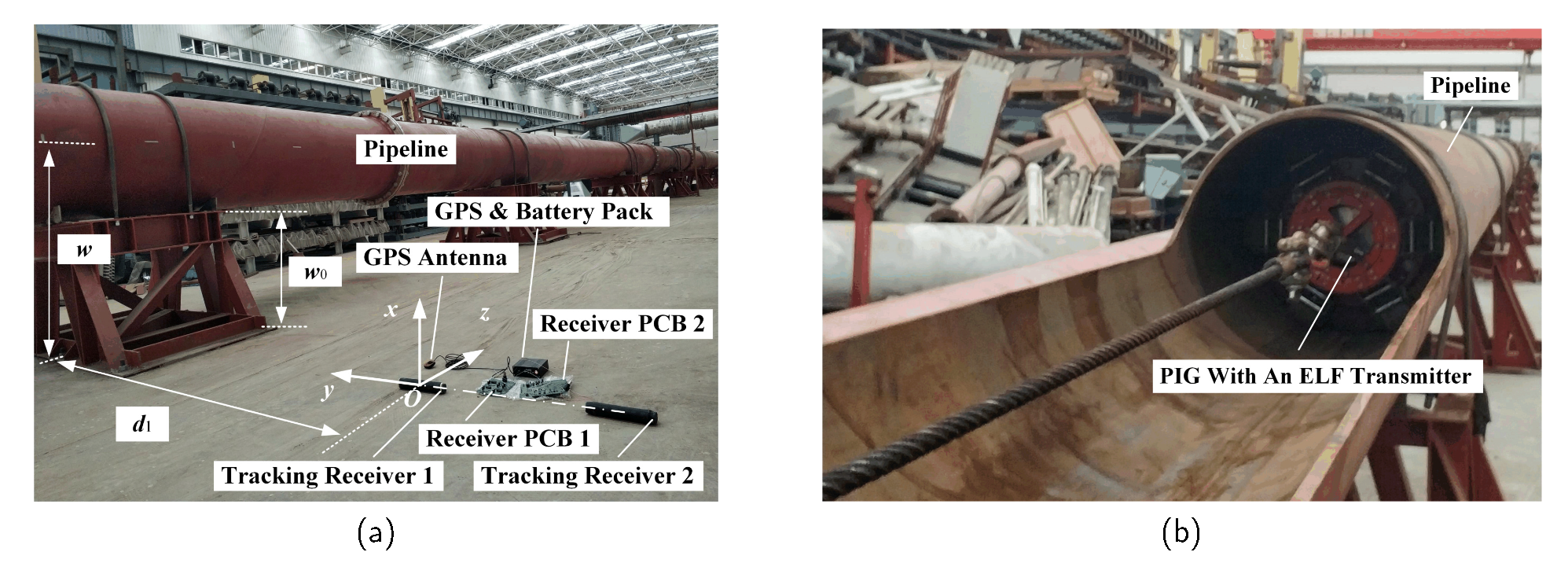
Therefore, the paper proposes a novel tracking receiver system with only two receiving coils distributed vertically and a corresponding 4-D tracking algorithm, which can achieve high-precision and 4-D tracking of the PIG. The dual receivers will detect the radiated magnetic field from transmitters at different heights. Using these dual magnetic signals and the distance between the dual receivers, it becomes possible to achieve 4-D tracking of the PIG. The tracking algorithm is mainly based on the origin symmetry feature of the radial component of the transmitter’s magnetic field, which has the smallest error in various assumptions of the magnetic analysis. It determines that the tracking error of the algorithm proposed in this paper will be smaller than traditional ELF-AGMs. The algorithm is also proposed to solve the redundancy problem in the previous positioning system. First, the paper introduces the design of the dual receivers tracking system in detail. Then, based on the MDM, three possible cases are presented to discuss the 4-D tracking model and corresponding analytical solutions, which are verified by a finite element model (FEM). Moreover, a 4-D tracking algorithm is developed. Furthermore, physical experiments and filed tests that synthesize three cases are performed. The results of FEM simulation and physical experiments are used to prove that the algorithm is feasible and accurate. Finally, the high robustness of the 4-D tracking algorithm is demonstrated.
4. Discussion
4.1. The Discussion of the Algorithm Accuracy
Comparing simulation results (
Table 1,
Table 2 and
Table 3) with experimental results (
Table 5 and
Table 6), two points can be found. First, the results of the experiments and simulation are consistent with theoretical analysis, which can prove the feasibility of the MFSI algorithm. Second, the tracking accuracy of pitch angle,
x,
y and
z are reduced due to the existence of pitch angle and the lateral offset and the coupling relationship between
and
, which can be compensated and optimized by the MFSI method. Compared to previous studies in references, the tracking accuracy has been improved 2 times by the dual receivers tracking system with the MFSI algorithm. Especially in the normal case, the MFSI algorithm improves the accuracy of tracking PIG by 10 times.
There are theoretical bases for the minimum positioning error of the MFSI method.
Firstly, the dual receivers tracking system with the MFSI algorithm uses the symmetrical distribution of the radiation field of the transmitting coil to realize the four-dimensional tracking of the PIG, while the traditional AGM usually has key position points where errors may exist. The PIG transmitter, pipeline and soil can be regarded as a cylindrical symmetrical system, and an accurate analytical solution based on the magnetic dipole model can be obtained in principle. In theoretical analysis, some approximate processing in the process of analyzing the transmitter’s radiation field will introduce errors. For instance, ignoring the length of the coil may cause errors in the analysis of the spatial distribution of the radiated magnetic field directly above the transmitter. The traditional AGM just makes use of these points where there may be analysis errors. On the contrary, with the transmitter center as the origin, from the perspective of electromagnetic fields, the symmetry of the entire system is inevitable. Therefore, it is no error that has the characteristics of origin symmetry and has the characteristics of axis symmetry. The MFSI algorithm is precisely based on this symmetry, so the accuracy is higher than traditional methods.
Secondly, referring to (
8), the MFSI algorithm has its own characteristics of filtering common-mode noise.
Thirdly, unlike traditional methods that only use a single characteristic data point (zero magnetic field point) to locate the PIG, the MFSI algorithm utilizes the statistical characteristics of all data, which can reduce random errors and further improve accuracy.
4.2. The Discussion of the Algorithm Robustness
The dual receivers tracking system and the corresponding MFSI algorithm proposed in this paper not only have the characteristics of high accuracy, but also strong robustness. As the ground soil and vegetation change over time, the pipeline may no longer be parallel to the ground. In addition, considering the invisibility of the underground pipeline, the receivers may be offset or tilted relative to the pipeline when it is installed. MFSI algorithm cannot only realize the tracking of four DOFs of a PIG but can also deal with these various unexpected cases.
4.2.1. The Lateral Offset Case
If it is in the lateral offset case for the receivers as shown in
Figure 3a, referring to
Section 2.3.2, the dual receivers tracking system can compensate for the effects of lateral offset and achieve high-precision tracking of PIG.
4.2.2. The Circumferential Tilt Case
In the case where the receivers are tilted in the
x-
y plane as shown in
Figure 13a, the coordinate system can be rotated by
degrees counterclockwise to transform the case into the lateral offset case as shown in
Figure 3b. At this point, the implementation of PIG’s four-dimensional tracking is exactly the same as in
Section 2.3.2, where the lateral offset
can be expressed as (
21):
where the
is the distance between the PIG transmitter and the tracking receiver 1 and
is the angle between the axes of the dual receivers and the
y-axis.
In this case, the distance between the transmitter and tracking receivers,
and
, and the distance between the dual receivers
r meet the relationship shown in (
22).
4.2.3. The Axial Tilt Case
It is also possible that the receivers are tilted in the
y-
z plane as shown in
Figure 13b. Similarly, if the the coordinate system is rotated by
degrees counterclockwise, the case can be transformed into the pitch angle case. The pitch angle
at this time equals to
, the angle between the axes of dual receivers and the
y-axis. The distance between the transmitter and tracking receivers,
and
, and the distance between dual receivers
r meet the relationship shown in (
22), in which
need to be replaced by
.
In a word, even if the dual receivers are in an unexpected case such as tilt or lateral offset, the PIG can still achieve accurate 4-D tracking by using the MFSI algorithm. Furthermore, this proves that the dual receivers tracking system and the corresponding MFSI algorithm are adaptable and robust.
4.3. Discussion on the Cost of the Dual Receivers Tracking System
Compared with the traditional ELF-AGMs, the complexity and cost of the dual receivers tracking system proposed in this paper do not increase significantly. There are usually two orthogonal receiving coils in traditional ELF-AGMs [
28,
29,
30]. The proposed tracking system has the same number of receiving coils as the traditional ELF-AGMs with the orthogonal coils. Therefore, the hardware cost of the designed tracking system has not increased.
Through vertical layout of the dual receiving coils, the proposed tracking system has acquired magnetic field signals of different heights, that is, the magnetic field distribution. Therefore, the position of the magnetic field source can be calculated inversely according to the electromagnetic field radiation model. In addition, the corresponding MFSI algorithm uses the magnetic field information of the entire process through which the PIG passes, instead of using the magnetic field value at a single point. This is equivalent to multiple sensors distributed along the horizontal line of the pipeline measuring the magnetic field. Therefore, the complexity and computational time cost of the tracking algorithm are increased.
Therefore, although the complexity and cost of the tracking system do not increase significantly, through the new layout of the receiving coils and the MFSI algorithm, the proposed tracking system achieves 4-D tracking of the PIG. At the same time, comparing results with previous studies in references [
27,
30], it can be found that the positioning accuracy has been improved by more than 50% under the FEM simulations, laboratory experiments, and field tests with unburied pipes.
Furthermore, although the complexity and cost of the tracking system do not increase significantly, the robustness of the tracking system is also improved, and accurate 4-D tracking can be performed even when the receiver is tilted or in the lateral offset case.
5. Conclusions
The traditional AGMs for tracking PIG have the disadvantages of low positioning accuracy and single tracking dimension. To solve the problem, the paper proposed a dual-receiver tracking system and a corresponding magnetic field sign-integration (MFSI) algorithm. The designed dual receivers tracking system is mainly composed of two vertically distributed receiving coils, which can detect the radiated magnetic field signals of the transmitting coils at two vertical distances. Based on the magnetic dipoles method, the paper gives an expression of the radiation magnetic field of the transmitting coil considering the attenuation effect of the pipeline. Based on the characteristics of the radiated magnetic field and the structure of the dual tracking receivers, the 4-D tracking model of the PIG is proposed in three cases, including the normal case, the lateral offset case and the pitch angle case. Considering that the underground pipeline may be one of the above three cases or a combination of the three, this paper proposes the MFSI algorithm that can be used to achieve 4-D tracking of the PIG in any case. The MFSI algorithm in the above three cases is verified by the finite element simulation. The tracking errors of the degrees of freedom (DOF) x, y, and z have been reduced from 20 mm in the references to within 8.17 mm in location. The tracking errors of the DOF pitch angle have been reduced from 6° in the reference to 0.4° in orientation. The paper also designs a set of physical experiments to verify the MFSI algorithm in a case that contains both lateral offset and the pitch angle. The tracking accuracy of the DOF x, y, z, and pitch angle in experiments is also doubled compared to the references. Finally, the characteristics of the MFSI algorithm, such as high accuracy and high robustness, have been discussed and demonstrated.
Compared with traditional ELF–AGMs, the dual receivers tracking system and the corresponding 4-D tracking algorithm based on the MFSI method have three advantages. First, a single radial coil instead of the orthogonal dual search coils can be used to acquire the same measurement results. The system complexity is reduced while the reliability is enhanced. Secondly, the system improves the accuracy by at least 2 times in terms of positioning and orientation. Thirdly, the system has high robustness and can perform accurate tracking when the receiver is tilted or in the lateral offset case. In summary, the dual receivers tracking system and corresponding MFSI algorithm proposed in this paper can realize the high-precision and four-dimensional tracking and positioning of PIG in the pipeline.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}