
Stochastic Analysis of a Priority Standby System under Preventive Maintenance



Abstract
:1. Introduction
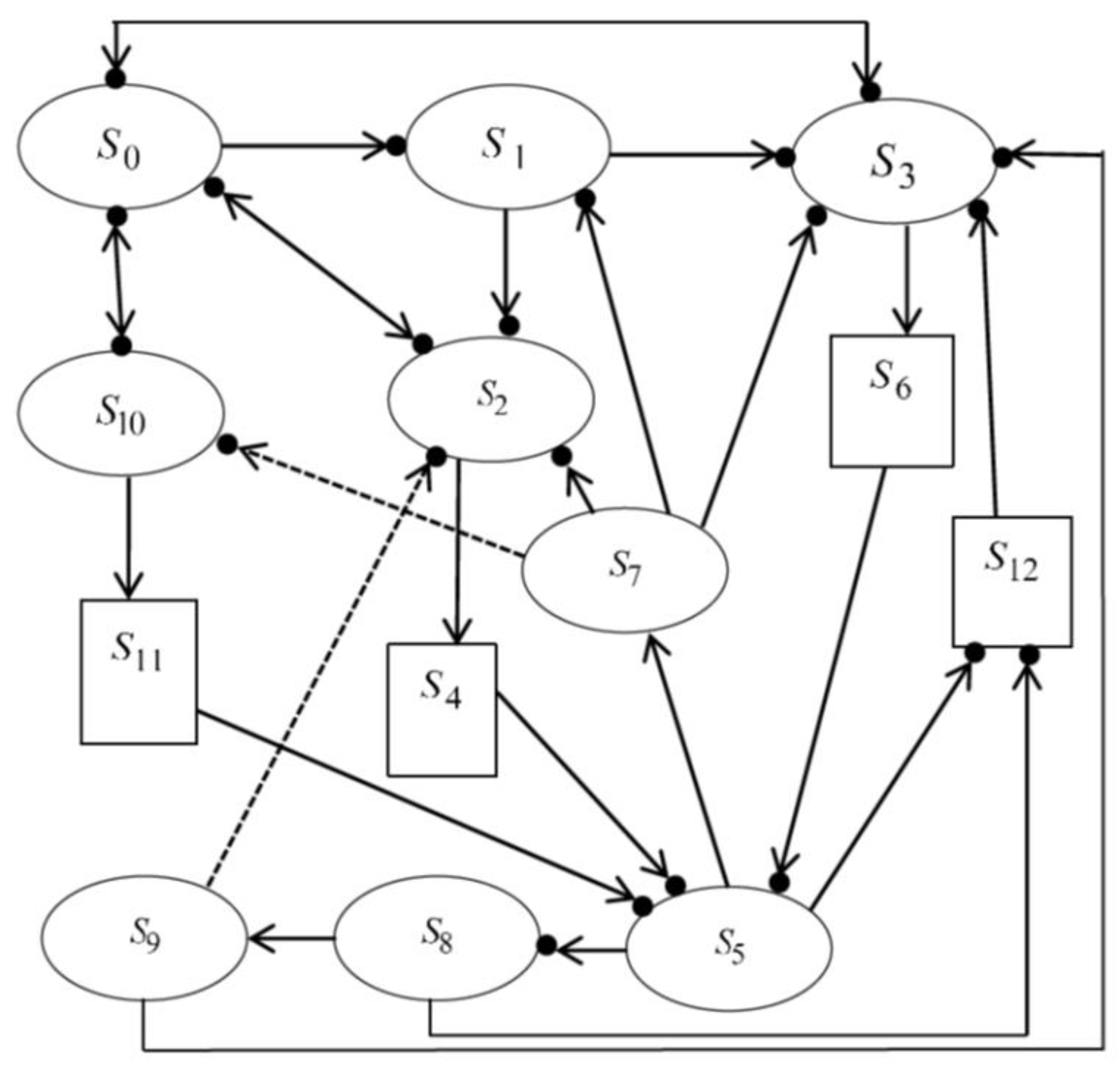
2. System Description
- The system consists of two dissimilar units: one is a priority unit and the other is the ordinary unit.
- The priority unit has three modes, namely, normal, total, and partial failures, while the ordinary unit has two modes, normal and total failure.
- Initially, the priority unit is in normal mode operation, while the ordinary unit can be kept as a standby case (cold standby).
- If the priority unit is in normal mode until time t without total (or partial) failures, then it should go to the PM (costlier with probability p and cheaper with probability ) provided that the standby unit is available. On the other hand, if the priority unit is in the partial failure mode until time t (without total failure), it should go to costlier PM provided that the standby unit is available. In all cases, when the standby unit is not available, then PM is postponed until the next time period of PM.
- The switchover is perfect and instantaneous and only one the server operator is available for both of the repairs and PM.
- All of the time distributions are arbitrary except the repair time of the ordinary unit.
- After repair or PM, the unit returns back to normal mode.
System States
| : | the unit is in normal mode/in normal mode and is continued from the |
| earlier state/in partial failure mode/in partial failure mode and | |
| is continued from the earlier state/in normal mode and is kept | |
| as cold standby. | |
| : | the unit is in failure mode and under repair/the unit in failure mode and |
| under repair is continued from the earlier state state/in failure mode | |
| and waiting for repair. | |
| : | the unit is in normal mode and under costlier PM/in normal mode and |
| under cheaper PM. | |
| : | the unit in normal mode and under costlier PM is continued from |
| the earlier state/the unit in normal mode and under cheaper | |
| PM is continued from the earlier state. |
3. Mean Time to System Failure
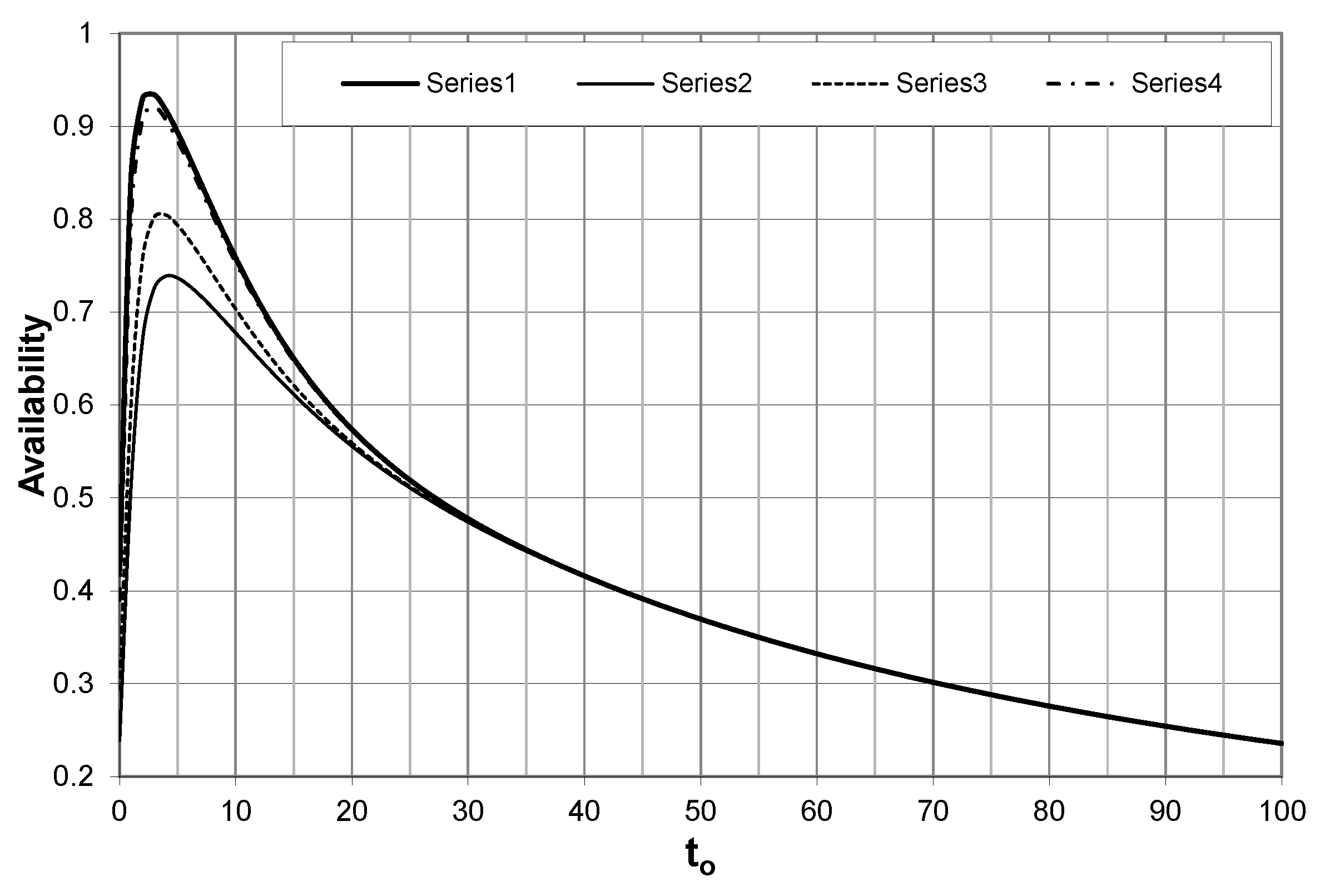
4. Availability Analysis
5. Busy Period Analysis
5.1. Expected Busy Period with Repair
5.2. Expected Busy Period with PM
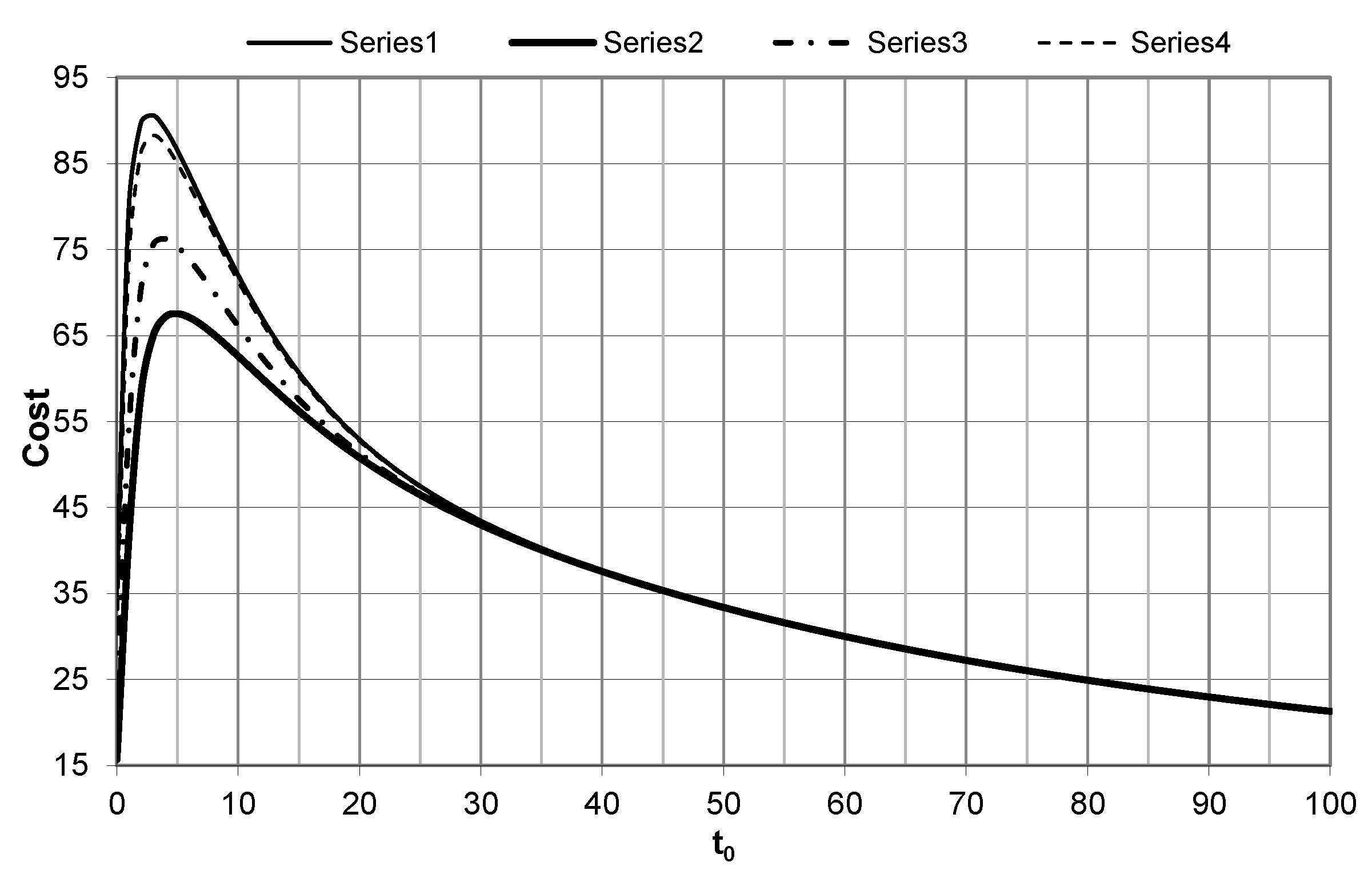
6. Cost–Benefit Analysis
7. Effect of PM on System Reliability
8. Numerical Illustration
| Series | p | ||||||||
| 1 | 0.3 | 0.1 | 0.05 | 1.5 | 2.5 | 0.2 | 0.3 | 0.5 | 1 |
| 2 | 0.3 | 0.1 | 0.05 | 0.2 | 2.5 | 0.2 | 0.3 | 0.5 | 1 |
| 3 | 0.3 | 0.1 | 0.05 | 1.5 | 0.5 | 0.2 | 0.3 | 0.5 | 1 |
| 4 | 0.8 | 0.1 | 0.005 | 1.5 | 2.5 | 0.2 | 0.3 | 0.5 | 1 |
- (i)
- The reliability measures of the system increase (decrease) as failure rate parameters decrease (increase).
- (ii)
- The reliability measures of the system increase (decrease) as the rates of the repair rates increase (decrease).
- (iii)
- The reliability measures of the system increase (decrease) as the PM rates increase (decrease).
- (iv)
- PM does not appear to be useful when the parameters of the failure rates are large or small (for example, when and , the optimal time for PM is not approached).
- (v)
- For the large values of , the reliability measures of the system reach the stable stage; this means that PM is not useful.
- (vi)
- The starting point and the optimal times of PM decrease as the failure parameters increase. Moreover, the time interval between the starting and optimal times of PM decreases as the parameters of the failure rate increase.
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| State of the system at ; | |
| E | Set of regenerative states; |
| Set of non-regenerative states; | |
| cdf of time until PM for priority unit; | |
| cdf of time to accomplish costlier PM and cheaper PM | |
| cdf of partial failure time and total failure time of priority unit | |
| from normal mode; | |
| cdf of total failure time from partial failure mode of priority unit | |
| Failure time of ordinary unite | |
| cdf of repair time of priority unit; | |
| pdf and cdf of time for the system t transits from regenerative state to ; | |
| pdf and cdf of time for the system transits from regenerative state to | |
| via the non-regenerative state ; | |
| Contribution to mean sojourn time in state , when the system transits direct | |
| to ; | |
| Contribution to mean sojourn time in state , when the system transits to | |
| via the non-regenerative state | |
| ∫p [ system sojourns in state for at least time t]dt; | |
| p[system is up initially in state is up at time t without passing through | |
| any other regenerative state or returning to itself through one or more states ∈ E]; | |
| P [the system is up at time t; | |
| P [server operator is busy with repair of priority unit , repair of ordinary unit | |
| at time t starting from state ]; | |
| P[server operator is busy with costlier PM of type (), cheaper PM of type () | |
| at time t starting from state ]; | |
| The expected profit incurred in ; | |
| Repair rate of ordinary unit; | |
| s | Dummy variable in Laplace transform ; |
| © | Symbol for convolution of and that is ; |
| * | Symbol for LT. |
References
- El-Sherbeny, M.; AL-Hussaini, E.K. Characteristic reliability measures of mixed standby components and asymptotic estimation. Int. J. Stat. Appl. 2012, 2, 11–23. [Google Scholar] [CrossRef]
- Kumar, A.; Malik, S.C. Stochastic modeling of a computer system with priority to PM over S/W replacement subject to maximum operation and repair times. Int. J. Comput. Appl. 2012, 43, 27–34. [Google Scholar] [CrossRef]
- Sharma, K.S.; Sharama, D.; Sharama, V. Reliability measures for a system having two-dissimilar cold standby units with random check and priority repair. Res. Math. Stat. 2010, 2, 69–74. [Google Scholar]
- Yusuf, I.; Bala, S.; Ali, U.A. Stochastic modeling of a non maintained system with two stages of deterioration. Int. J. Basic Appl. Sci. 2012, 1, 314–320. [Google Scholar] [CrossRef] [Green Version]
- Yuan, L.; Meng, X. Reliability analysis of a warm standby repairable system with priority use. Appl. Math. 2011, 35, 4295–4303. [Google Scholar] [CrossRef]
- El-Said, K. Stochastic analysis of a two-unit cold standby system with two-stage repair and waiting time. Sankhya 2010, 72, 1–10. [Google Scholar] [CrossRef]
- Mahmoud, M.A.W.; Moshref, M.E. On a two-unit cold standby system considering hardware, human error failures and preventive maintenance. Math. Comput. Model. 2010, 51, 736–745. [Google Scholar] [CrossRef]
- Mahmoud, M.A.W.; Mohie El-Din, M.M.; El-Said Moshref, M. Optimum preventive maintenance for a 2-unit priority-standby system with patience-time for repair. Optimization 1994, 29, 361–379. [Google Scholar] [CrossRef]
- Di Nardo, M.; Madonna, M.; Murino, T.; Castagna, F. Modelling a safety management system using system dynamics at the Bhopal incident. Appl. Sci. 2020, 10, 903. [Google Scholar] [CrossRef] [Green Version]
- Wells, C.E. Reliability analysis of a single warm-standby system subject to repairable and nonrepairable failures. Eur. J. Oper. Res. 2014, 335, 180–186. [Google Scholar] [CrossRef]
- Zhong, C.; Jin, H. A novel optimal preventive maintenance policy for a cold standby system based on semi-Markov theory. Eur. J. Oper. Res. 2014, 332, 405–411. [Google Scholar] [CrossRef]
- Levitin, G.; Finkelstein, M.; Dai, Y. Optimal preventive replacement policy for homogeneous cold standby systems with reusable elements. Reliab. Eng. Syst. Saf. 2020, 204, 107135. [Google Scholar] [CrossRef]
- Ruiz-Castroa, J.E.; Dawabshab, M. A multi-state warm standby system with preventive maintenance, loss of units and an indeterminate multiple number of repairpersons. Comput. Ind. Eng. 2020, 142, 106348. [Google Scholar] [CrossRef]
- Ge, X.; Sun, J.; Wu, Q. Reliability analysis for a cold standby system under stepwise Poisson shocks. J. Control Decis. 2021, 8, 27–40. [Google Scholar] [CrossRef]
- Gao, S.; Wang, J. Reliability and availability analysis of a retrial system with mixed standbys and an unreliable repair facility. Reliab. Eng. Syst. Saf. 2021, 205, 107240. [Google Scholar] [CrossRef]
- Kumar, A.; Barak, M.S.; Devi, K. Performance analysis of a redundant system with Weibull failure and repair laws. Rev. Investig. Oper. 2016, 37, 247–257. [Google Scholar]
- Kumar, J.; Goel, M. Availability and profit analysis of a two-unit cold standby system for general distribution. Cogent Math. Stat. 2016, 3, 1262937. [Google Scholar] [CrossRef]
- Hirata, R.; Arizono, I.; Takemoto, Y. On reliability analysis in priority standby redundant systems based on maximum entropy principle. Qual. Technol. Quant. Manag. 2021, 18, 117–133. [Google Scholar] [CrossRef]
- Kumar, A. Cost–benefit analysis of a repairable system in abnormal environmental conditions. Palest. J. Math. 2016, 5, 111–119. [Google Scholar]
- Kumar, P.; Chowdhary, S. Stochastic analysis of a two-unit standby system model with preventive maintenance and random appearance and disappearance of repairman. Math. Eng. Sci. Aerosp. 2015, 6, 221–231. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MTSF | ST | OT | OV | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1.5 | 2.5 | 0.01 | 0.001 | 403.38 | 17.5 | 27.9 | 54.3 | 73.0 | 611.31 | 532.27 |
| 0.01 | 256.30 | 10.4 | 16.4 | 35.1 | 45.7 | 419.90 | 361.60 | |||
| 0.05 | 80.20 | 3.0 | 4.8 | 10.1 | 13.3 | 125.40 | 108.80 | |||
| 0.05 | 0.001 | 96.20 | 3.4 | 5.3 | 9.1 | 12.2 | 149.10 | 124.7 | ||
| 0.01 | 91.31 | 3.1 | 4.9 | 8.8 | 11.7 | 145.40 | 121.51 | |||
| 0.05 | 60.30 | 2.0 | 3.1 | 6.5 | 8.3 | 101.80 | 86.11 | |||
| 0.10 | 0.001 | 57.06 | 1.8 | 2.7 | 5.2 | 6.4 | 98.90 | 81.70 | ||
| 0.01 | 56.14 | 1.7 | 2.6 | 5.2 | 6.3 | 97.93 | 81.01 | |||
| 0.05 | 46.42 | 1.4 | 2.2 | 4.6 | 5.7 | 82.53 | 69.20 | |||
| 3.0 | 0.01 | 0.001 | 403.38 | 14.7 | 26.9 | 48.9 | 71.1 | 646.95 | 537.72 | |
| 0.01 | 256.30 | 8.8 | 15.9 | 31.8 | 44.9 | 444.78 | 365.25 | |||
| 0.05 | 80.20 | 2.5 | 4.6 | 9.0 | 13.0 | 132.85 | 109.82 | |||
| 0.05 | 0.001 | 96.20 | 2.9 | 5.1 | 8.3 | 13.9 | 160.69 | 126.19 | ||
| 0.01 | 91.31 | 2.7 | 4.8 | 8.1 | 11.5 | 156.62 | 122.94 | |||
| 0.05 | 60.30 | 1.7 | 3.1 | 6.0 | 8.1 | 108.86 | 87.08 | |||
| 0.10 | 0.001 | 57.06 | 1.5 | 2.6 | 4.9 | 6.3 | 106.68 | 82.77 | ||
| 0.01 | 56.14 | 1.5 | 2.5 | 4.8 | 6.2 | 105.65 | 82.05 | |||
| 0.05 | 46.42 | 1.2 | 2.1 | 4.3 | 5.6 | 88.51 | 70.03 | |||
| 2.0 | 2.5 | 0.01 | 0.001 | 403.38 | 13.8 | 17.0 | 47.2 | 53.6 | 659.96 | 615.37 |
| 0.01 | 256.30 | 8.3 | 10.2 | 30.8 | 34.7 | 454.27 | 421.93 | |||
| 0.05 | 80.20 | 2.4 | 2.9 | 8.7 | 9.8 | 135.77 | 126.34 | |||
| 0.05 | 0.001 | 96.20 | 2.7 | 3.3 | 8.0 | 8.9 | 166.48 | 151.46 | ||
| 0.01 | 91.31 | 2.5 | 3.1 | 7.8 | 8.7 | 162.24 | 147.65 | |||
| 0.05 | 60.30 | 1.6 | 2.0 | 5.8 | 6.5 | 112.32 | 103.24 | |||
| 0.10 | 0.001 | 57.06 | 1.4 | 1.7 | 4.7 | 5.2 | 112.09 | 101.68 | ||
| 0.01 | 56.14 | 1.5 | 1.7 | 4.7 | 5.1 | 110.99 | 100.72 | |||
| 0.05 | 46.42 | 1.1 | 1.3 | 4.2 | 4.6 | 92.46 | 84.58 | |||
| 3.0 | 0.01 | 0.001 | 403.38 | 11.2 | 16.3 | 41.8 | 52.1 | 709.81 | 625.0 | |
| 0.01 | 256.30 | 6.8 | 9.0 | 27.4 | 33.7 | 490.39 | 428.91 | |||
| 0.05 | 80.20 | 1.9 | 2.8 | 7.7 | 9.6 | 146.26 | 123.36 | |||
| 0.05 | 0.001 | 96.20 | 2.2 | 3.1 | 7.2 | 8.7 | 183.76 | 154.64 | ||
| 0.01 | 91.31 | 2.1 | 3.0 | 7.1 | 8.5 | 178.97 | 150.74 | |||
| 0.05 | 60.30 | 1.3 | 1.9 | 5.3 | 6.3 | 122.45 | 105.18 | |||
| 0.10 | 0.001 | 57.06 | 1.4 | 1.6 | 4.4 | 5.1 | 123.92 | 103.89 | ||
| 0.01 | 56.14 | 1.5 | 1.6 | 4.4 | 5.0 | 122.63 | 102.90 | |||
| 0.05 | 46.42 | 0.9 | 1.3 | 3.9 | 4.5 | 101.25 | 86.23 | |||
| AV () | Cost () | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| OT | OV | OT | OV | OT | OV | OT | OV | ||||
| 1.5 | 2.5 | 0.01 | 0.001 | 7.0 | 0.9641 | 7.0 | 0.9488 | 8.2 | 95.47 | 9.3 | 93.42 |
| 0.01 | 6.2 | 0.9627 | 6.4 | 0.9475 | 7.0 | 95.18 | 7.8 | 93.09 | |||
| 0.05 | 3.8 | 0.9435 | 4.1 | 0.9287 | 3.9 | 92.16 | 4.4 | 89.84 | |||
| 0.05 | 0.001 | 4.0 | 0.9542 | 4.2 | 0.9395 | 4.2 | 93.67 | 4.6 | 91.37 | ||
| 0.01 | 3.9 | 0.9537 | 4.1 | 0.9390 | 4.1 | 93.57 | 4.5 | 91.27 | |||
| 0.05 | 3.3 | 0.9413 | 3.5 | 0.9267 | 3.4 | 91.67 | 3.7 | 89.26 | |||
| 0.10 | 0.001 | 2.9 | 0.9486 | 3.0 | 0.9301 | 3.0 | 92.06 | 3.3 | 89.59 | ||
| 0.01 | 2.9 | 0.9443 | 3.0 | 0.9298 | 3.0 | 92.00 | 3.3 | 89.53 | |||
| 0.05 | 2.5 | 0.9363 | 2.7 | 0.9218 | 2.7 | 90.76 | 3.0 | 88.23 | |||
| 3.0 | 0.01 | 0.001 | 7.2 | 0.9684 | 7.1 | 0.9500 | 8.1 | 95.97 | 9.3 | 93.57 | |
| 0.01 | 6.2 | 0.9671 | 6.4 | 0.9487 | 6.9 | 95.68 | 7.8 | 93.22 | |||
| 0.05 | 3.8 | 0.9437 | 4.1 | 0.9298 | 4.0 | 92.67 | 4.3 | 89.97 | |||
| 0.05 | 0.001 | 3.9 | 0.9585 | 4.2 | 0.9406 | 4.1 | 94.17 | 4.6 | 91.50 | ||
| 0.01 | 3.8 | 0.9580 | 4.2 | 0.9401 | 4.1 | 94.07 | 4.5 | 91.39 | |||
| 0.05 | 3.2 | 0.9455 | 3.4 | 0.9278 | 3.3 | 92.18 | 3.7 | 89.38 | |||
| 0.10 | 0.001 | 2.8 | 0.9487 | 3.0 | 0.9311 | 2.9 | 92.57 | 3.3 | 89.71 | ||
| 0.01 | 2.7 | 0.9483 | 3.0 | 0.9308 | 2.9 | 92.52 | 3.4 | 89.63 | |||
| 0.05 | 2.5 | 0.9406 | 2.7 | 0.9228 | 2.6 | 91.27 | 3.0 | 88.34 | |||
| 2.0 | 2.5 | 0.01 | 0.001 | 7.3 | 0.9702 | 7.1 | 0.9649 | 7.9 | 96.21 | 8.7 | 95.33 |
| 0.01 | 7.1 | 0.9703 | 6.1 | 0.9636 | 7.9 | 96.21 | 7.4 | 95.00 | |||
| 0.05 | 3.8 | 0.9488 | 3.9 | 0.9444 | 3.9 | 92.98 | 4.2 | 91.84 | |||
| 0.05 | 0.001 | 3.9 | 0.9608 | 4.0 | 0.9554 | 4.1 | 94.51 | 4.3 | 93.39 | ||
| 0.01 | 3.9 | 0.9602 | 3.9 | 0.9549 | 4.0 | 94.42 | 4.2 | 93.29 | |||
| 0.05 | 3.2 | 0.9479 | 3.2 | 0.9426 | 3.3 | 92.55 | 3.4 | 92.32 | |||
| 0.10 | 0.001 | 2.7 | 0.9518 | 2.9 | 0.9461 | 2.9 | 93.03 | 3.1 | 91.73 | ||
| 0.01 | 2.7 | 0.9515 | 2.8 | 0.9460 | 2.9 | 92.97 | 3.0 | 91.67 | |||
| 0.05 | 2.5 | 0.9435 | 2.6 | 0.9380 | 2.6 | 91.73 | 2.7 | 90.37 | |||
| 3.0 | 0.01 | 0.001 | 6.8 | 0.9749 | 7.0 | 0.9662 | 7.8 | 96.72 | 7.8 | 95.45 | |
| 0.01 | 6.8 | 0.9734 | 6.3 | 0.9648 | 6.7 | 96.44 | 7.3 | 95.15 | |||
| 0.05 | 3.7 | 0.9543 | 3.9 | 0.9456 | 3.8 | 93.52 | 4.1 | 91.98 | |||
| 0.05 | 0.001 | 3.8 | 0.9652 | 4.0 | 0.9566 | 4.0 | 95.04 | 4.3 | 93.53 | ||
| 0.01 | 3.7 | 0.9648 | 4.0 | 0.9536 | 3.9 | 94.95 | 4.2 | 93.43 | |||
| 0.05 | 3.0 | 0.9525 | 3.2 | 0.3938 | 3.2 | 93.1 | 3.4 | 91.46 | |||
| 0.10 | 0.001 | 2.7 | 0.9564 | 2.8 | 0.9475 | 3.0 | 93.54 | 3.0 | 91.87 | ||
| 0.01 | 2.7 | 0.9561 | 2.8 | 0.9474 | 2.8 | 93.53 | 3.0 | 91.81 | |||
| 0.05 | 2.4 | 0.9481 | 2.5 | 0.9392 | 2.5 | 92.30 | 2.7 | 90.52 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sultan, K.S.; Moshref, M.E. Stochastic Analysis of a Priority Standby System under Preventive Maintenance. Appl. Sci. 2021, 11, 3861. https://doi.org/10.3390/app11093861
Sultan KS, Moshref ME. Stochastic Analysis of a Priority Standby System under Preventive Maintenance. Applied Sciences. 2021; 11(9):3861. https://doi.org/10.3390/app11093861
Chicago/Turabian StyleSultan, Khalaf S., and Mohamed E. Moshref. 2021. "Stochastic Analysis of a Priority Standby System under Preventive Maintenance" Applied Sciences 11, no. 9: 3861. https://doi.org/10.3390/app11093861