
Development of a Caterpillar-Type Walker for the Elderly People


Abstract
:1. Introduction
2. Materials and Methods
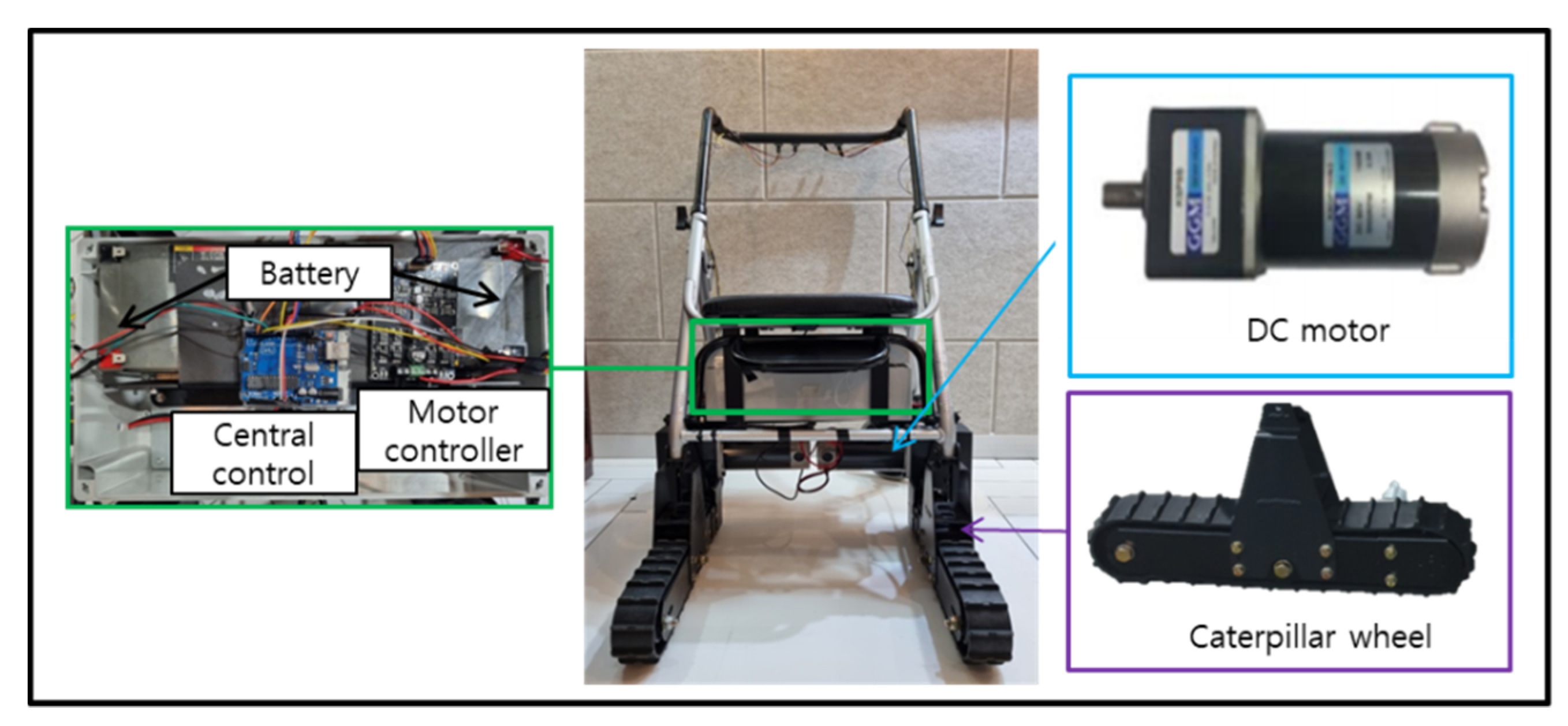
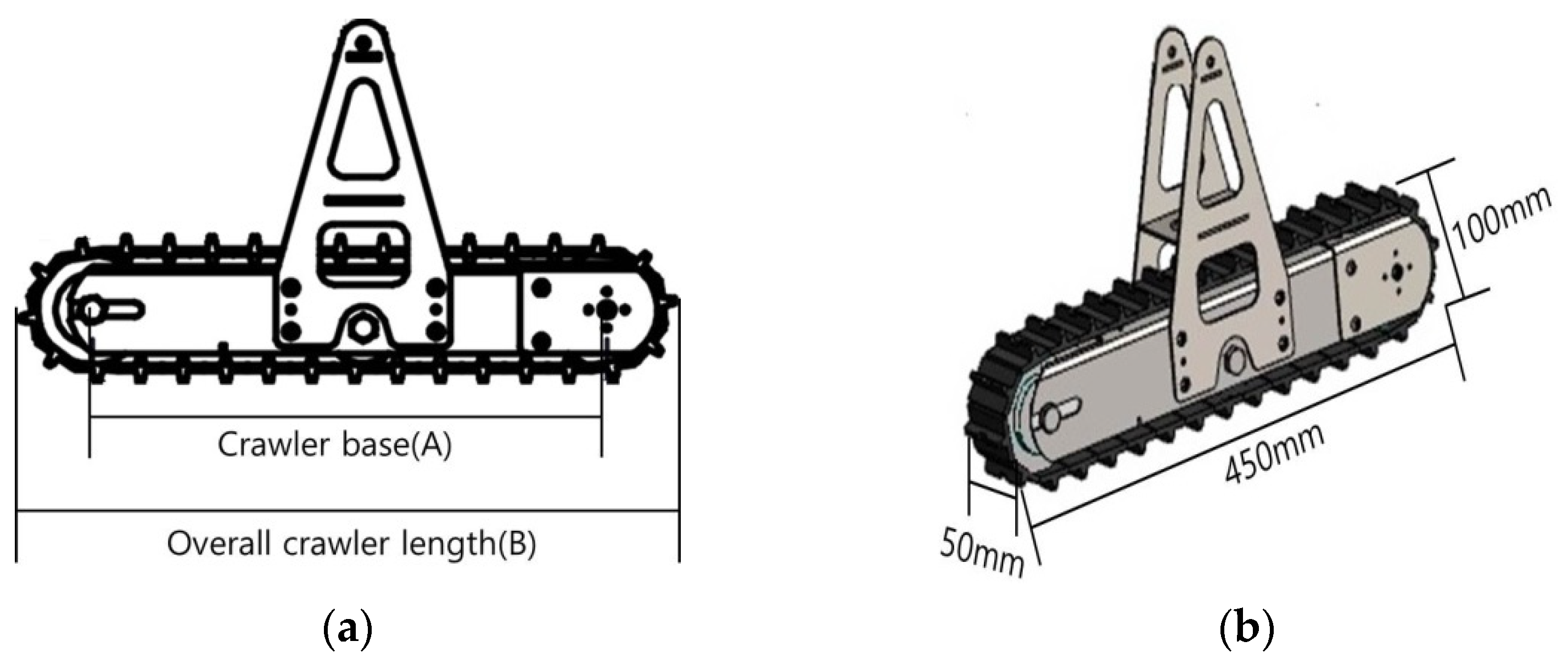
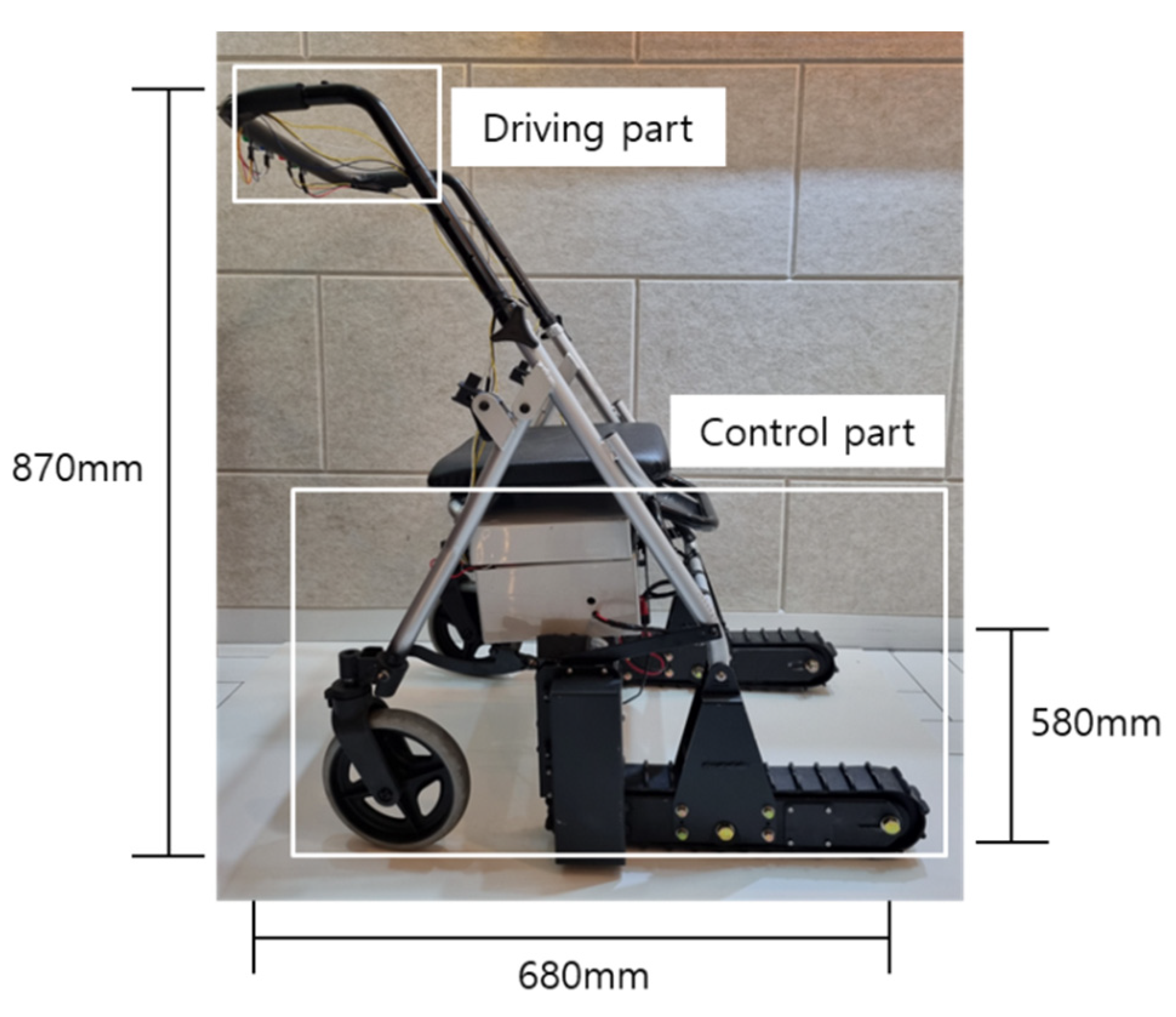
2.1. Design of Caterpillar-Type Walker
2.2. Driving Part
2.3. Control Part
2.4. Experimental Method
2.4.1. Participants
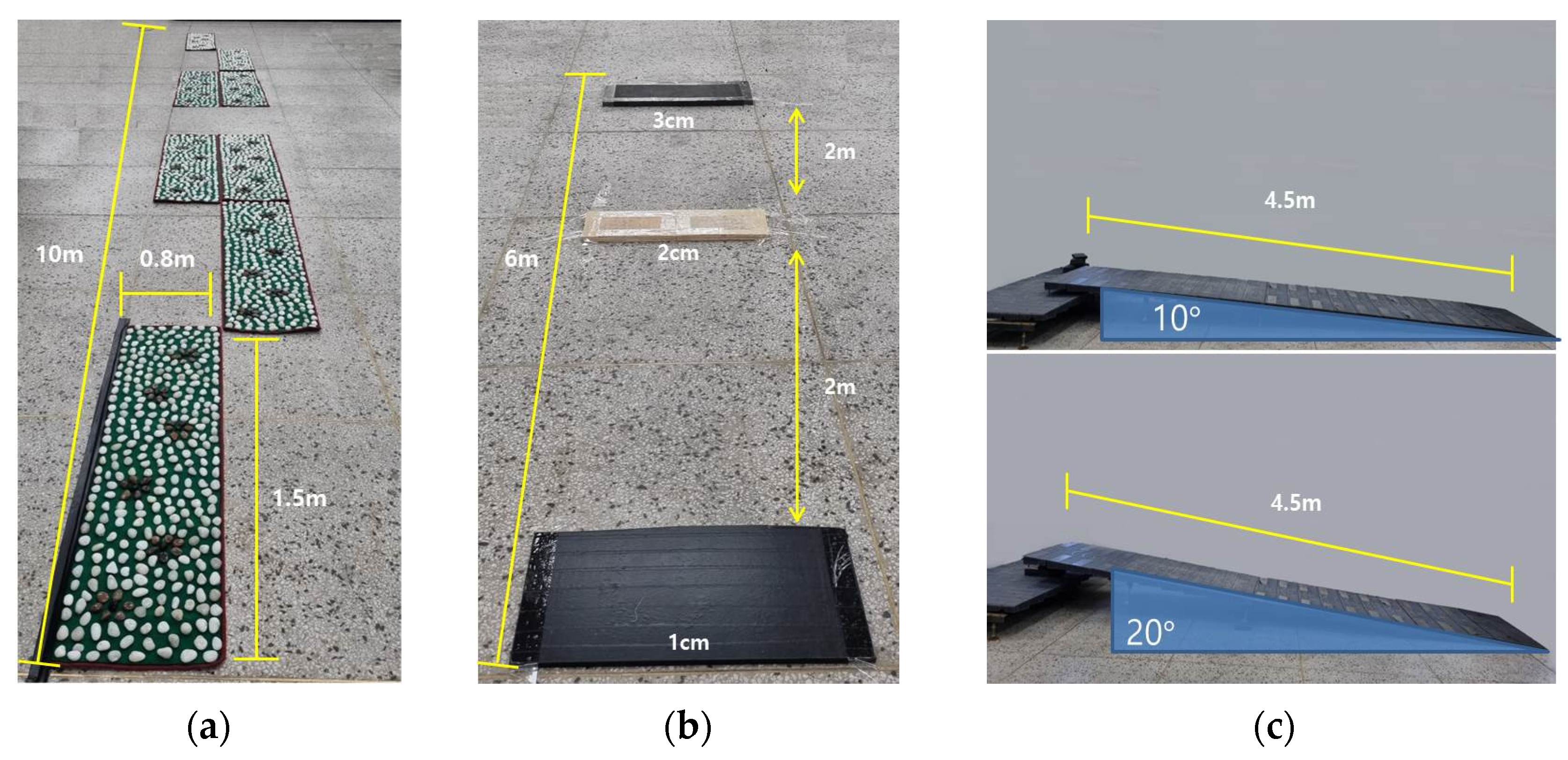
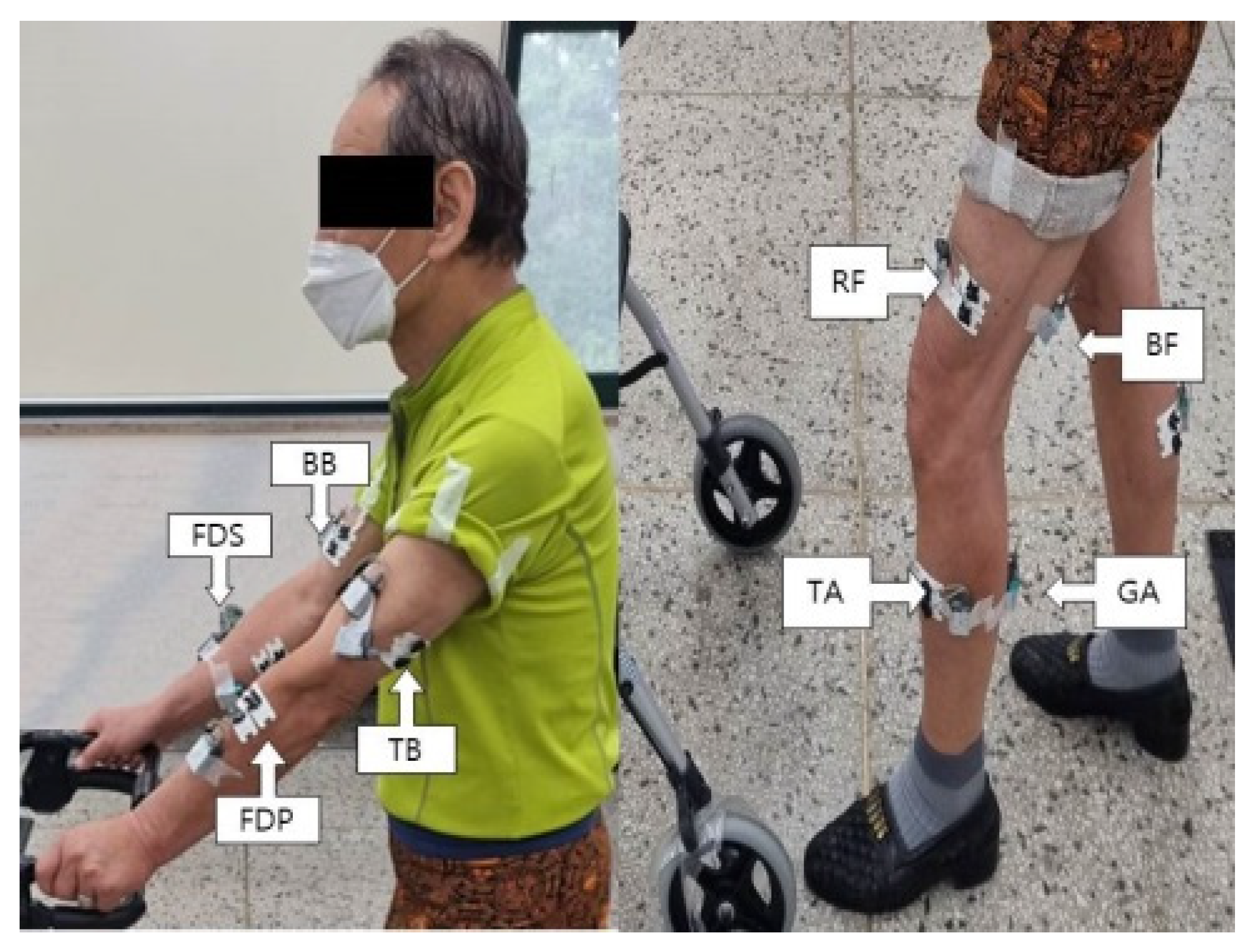
2.4.2. Experimental Methods and Procedures
2.4.3. Statistical Analysis
3. Results
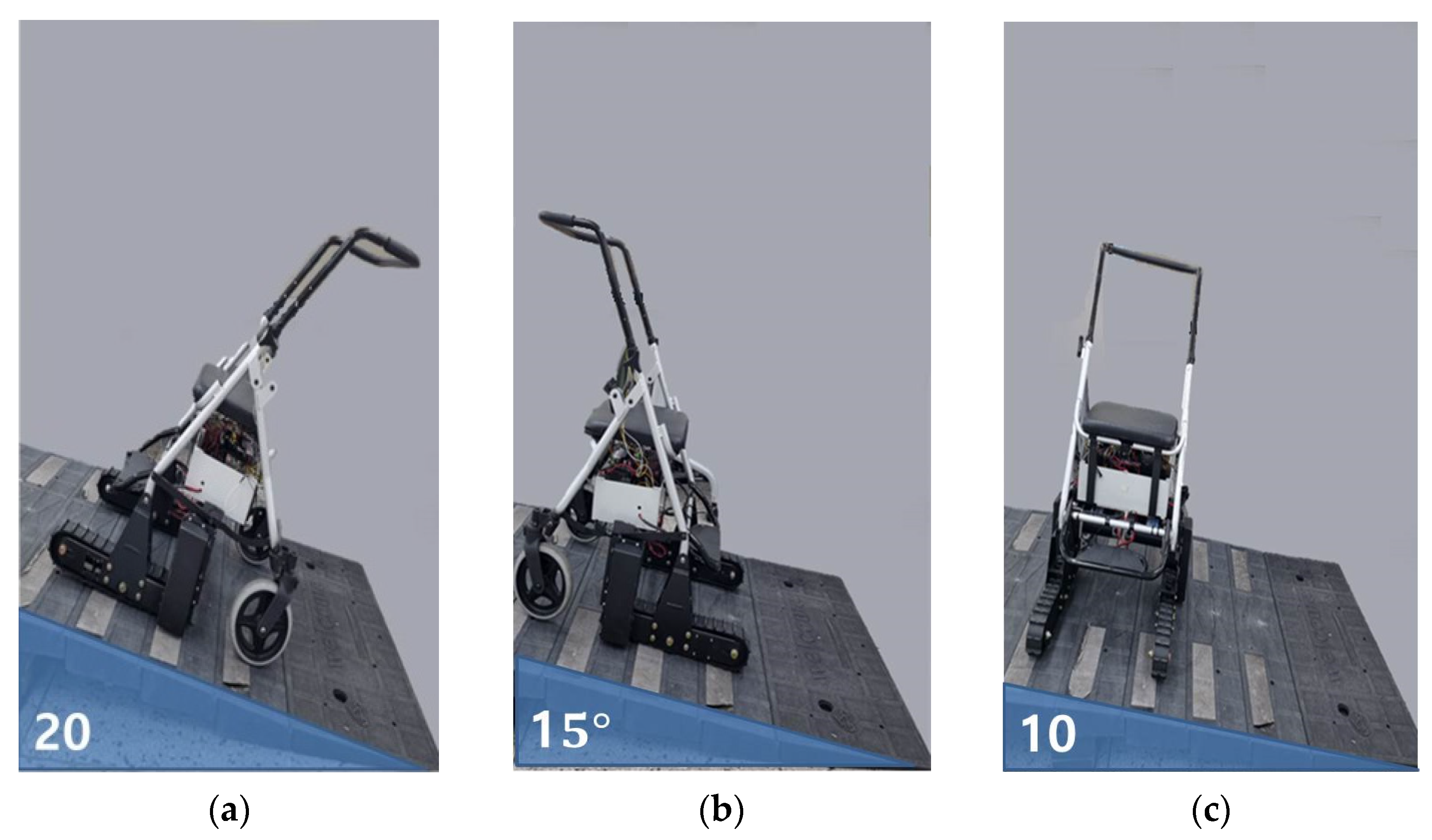
3.1. Static Stability
3.2. Upper and Lower Extremity Muscle Activity
3.2.1. Uneven Terrain
3.2.2. Obstacle Terrain
3.2.3. Sloped Terrain
3.3. The Number of Overcome Obstacles
3.4. Walking Speed for Each Terrain
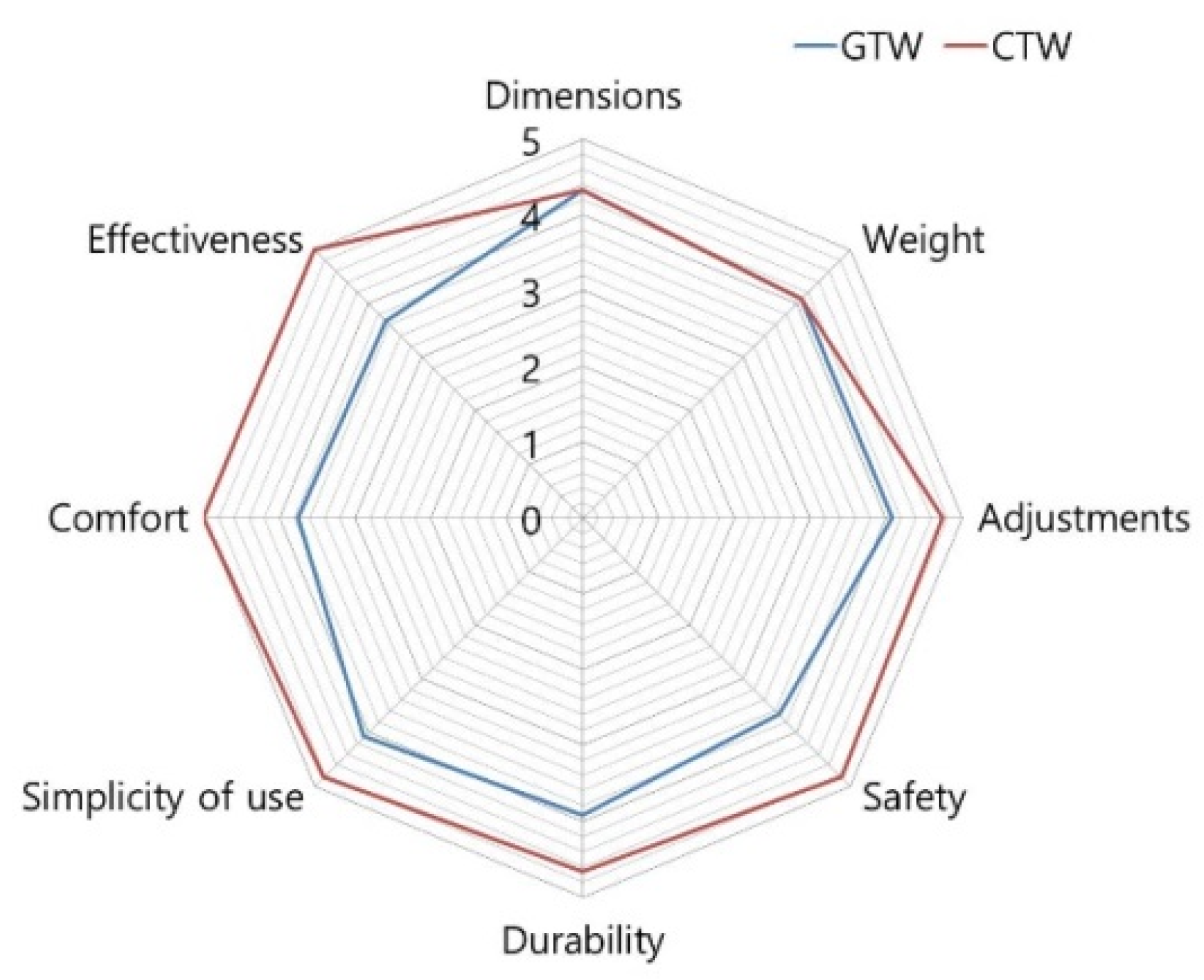
3.5. Satisfaction
4. Discussion
5. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Park, C.J.; Kim, B.G.; Haan, C.H. Investigation of the listening environment of classrooms for elderly people using speech intelligiblity tests. Acoust. Soc. Korea 2021, 40, 18–30. [Google Scholar] [CrossRef]
- Atia, C.M. Human-Smart Rollator Interaction for Gait Analysis and Fall Prevention Using Learning Methods and the i-Walker. Ph.D. Thesis, Polytechnic Universiry of Catalonia, Barcelona, Spain, 2018. [Google Scholar]
- Kwon, H.C.; Choi, S.R.; Cho, Y.R.; Lee, H.J.; Tae, K.S. Biomechanical Analysis in the Lower Extremities During Walking with a Four Wheeled Walker (Rollator) Using the Motion Analysis System. J. Rehabil. Welf. Eng. Assist. Technol. 2018, 12, 241–248. [Google Scholar] [CrossRef]
- Park, K.-W. Gait Disturbances in Elderly Life. J. Korean Neurol. Assoc. 2017, 35, 10–15. [Google Scholar] [CrossRef]
- Lu, T.; Song, Q.-H.; Xu, R.-M.; Guo, Y.-H.; Wang, F.; Hu, J.-P.; Wang, Y.; Zhang, L.-Y. Dance combined with magnetic pulse stimulates the ability of walk and balance in elder people. Int. J. Clin. Exp. Med. 2015, 8, 4381–4386. [Google Scholar] [PubMed]
- Park, Y.J.; Bae, I.Y.; Song, S.I. A study on universal walker design for elders with bent back. J. Korean Cryst. Growth Cryst. Technol. 2017, 27, 206–211. [Google Scholar] [CrossRef]
- Oh, J.-G.; Cho, W.-J. The effect of lower body muscles strength exercise program on the isokinetic strength and fall prevention fitness of the elderly women. Korean J. Sports Sci. 2018, 27, 1225–1235. [Google Scholar] [CrossRef]
- Rubenstein, L.Z. Falls in older people: Epidemiology, risk factors and strategies for prevention. Age Ageing 2006, 35, 37–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, X.; Li, J.; Hu, Z.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; De Momi, E. Novel Design and Lateral Stability Tracking Control of a Four-Wheeled Rollator. Appl. Sci. 2019, 9, 2327. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, J.; Fan, K.; Chen, Z.; Hu, Z.; Yu, Y. Neural Approximation Enhanced Predictive Tracking Control of a Novel Designed Four-Wheeled Rollator. Appl. Sci. 2019, 10, 125. [Google Scholar] [CrossRef] [Green Version]
- De Mettelinge, T.R.; Cambier, D. Understanding the Relationship Between Walking Aids and Falls in Older Adults: A pro-spective cohort study. J. Geriatr. Phys. Ther. 2015, 38, 127–132. [Google Scholar] [CrossRef] [PubMed]
- Moon, C.W.; Kim, K.H. A study on the Design Satisfaction and Requirements for User Experience for Walking Frames. Korean Soc. Basic Des. Art. 2016, 17, 127–138. [Google Scholar]
- Yeaser, A.; Tung, J.; Huissoon, J.; Hashemi, E. Learning-Aided User Intent Estimation for Smart Rollators. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 3178–3183. [Google Scholar]
- Roh, H.L.; Shin, E.J. Gait Analysis of Walker Depending External Loads. In Proceedings of the Conference on Korea Academy Industrial Cooperation Society, Jeongseon, Korea, 22–23 May 2015; pp. 631–634. [Google Scholar]
- Kim, B.M.; Lee, W.Y.; Lee, E.H. Foldable Electric Walking Design and Production for the Elderly. J. Rehabil. Welf. Eng. Assist. Technol. 2014, 8, 299–303. [Google Scholar]
- Koumpouros, Y.; Toulias, T.L.; Tzafestas, C.S.; Moustris, G. Assessment of an intelligent robotic rollator implementing navigation assistance in frail seniors. Technol. Disabil. 2020, 32, 159–177. [Google Scholar] [CrossRef]
- Costamagna, E.; Thies, S.B.; Kenney, L.P.J.; Howard, D.; Lindemann, U.; Klenk, J.; Baker, R. Objective measures of rollator user stability and device loading during different walking scenarios. PLoS ONE 2019, 14, e0210960. [Google Scholar] [CrossRef] [PubMed]
- Bertrand, K.; Raymond, M.-H.; Miller, W.C.; Ginis, K.A.M.; Demers, L. Walking Aids for Enabling Activity and Participation. Am. J. Phys. Med. Rehabil. 2017, 96, 894–903. [Google Scholar] [CrossRef] [PubMed]
- Lee, D.K.; Kong, J.S.; Goh, M.S.; Lee, E.H. Vibration Reduction Algorithm at the Walking-will Recognition on Uneven Terrain. J. Korean Inst. Intell. Syst. 2011, 21, 42–48. [Google Scholar] [CrossRef]
- Zhang, X.; Mu, X.; Xu, H.; Alhassan, A.B.; Kadry, H.K. Vibration Characteristics Analysis of Human- Robot Coupled System for Walking Posture of Elderly-Assistant Robot. IEEE Access 2021, 9, 44217–44235. [Google Scholar] [CrossRef]
- Choi, H.S.; Kim, M.K.; Shin, G.W.; Kim, J.K.; Kim, I.Y.; Baek, Y.S. Development of the Algorithm for Controlling the Electric Walking Aids on the Slope by Using FSR Foot Sensor. In Proceedings of the Conference on JKSPE, Gwangju, Korea, 13–15 December 2017; pp. 611–612. [Google Scholar]
- Lee, K.S.; Kim, K.R.; Kim, H.C.; Chae, H.S.; Kim, S.W.; Seo, M.T. Development and Evaluation of Rollator for Elderly Farmers. J. Ergon. Soc. Korea 2014, 33, 487–497. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.G.; Kim, J.W.; Kwak, J.H.; Hong, D.H.; Lee, K.D.; An, J.U. Wheel & Track Hybrid Mobile Robot Platform and Mechanism for Optimal Navigation in Urban Terrain. J. Korea Robot. Soc. 2010, 5, 270–277. [Google Scholar]
- Kong, J.-Y. Satisfaction Evaluation for Orthoses by using QUEST. J. Korea Acad. Coop. Soc. 2016, 17, 109–116. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.S.; Kim, Y.R. Biomechanical Model of Hand to Predict Muscle Force and Joint Force. J. Ergon. Soc. Korea 2009, 28, 1–6. [Google Scholar]
- Lee, J.-S.; Ahn, J.-Y.; Yoon, S.-J. The Effects of Low-Intensity Strength Training after Heat Stress on Lower Extremity Musculoskeletal System and Growth Related Factors in Older Women. Korean J. Sports Sci. 2017, 26, 989–1000. [Google Scholar] [CrossRef]
- Jung, J.Y.; Kim, C.S. The Effect of Bilateral Tapping Training on the Intensity of Triceps Muscle Activities and Reaching Time of Affected Upper Limb in Children with Hemiplegia. J. Korean Phys. Ther. 2003, 15, 417–432. [Google Scholar]
- Yang, Y.-A. The Responding Strategies of Musculorskeletal Disease in Aging Society. J. Ergon. Soc. Korea 2010, 29, 505–511. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.K.; Kim, T.H. The Change of Lower-limb Muscle Activity according to Gait speed when Normal and Assistive Gait of older. Korean Acad. Ortho. Man. Phys. Ther. 2008, 14, 60–67. [Google Scholar]
- Shin, S.H.; Kim, M.J.; Ko, H.; Kang, S.-R.; Jeong, H.C.; Hong, C.U.; Kwon, T.K. Analysis of Brain and Muscle Activity in Maintaining Postural Balance According to the Ground Conditions. Trans. Korean Soc. Mech. Eng. B 2020, 44, 169–175. [Google Scholar] [CrossRef]
- Lee, W.Y.; Lee, D.K.; Lee, E.H. A Study on The Straightness Improvement Method for Ensure Safety of Mobile Walker in Slope. J. Rehabil. Welf. Eng. Assist. Technol. 2014, 8, 187–196. [Google Scholar]
- Kim, S.Y.; Kim, S.M.; Bang, S.Y. Foot Pain and Disability in Community Dwelling Elders. J. Korean Gerontol. Nurs. 2011, 13, 69–78. [Google Scholar]
- Park, J.H.; Kim, W.J.; Shin, Y.H.; Kim, J. Development of Backpack Loading Estimation Model using Surface Electromyography (SEMG) of Gastrocnemius During Walking and Running. In Proceedings of the Conference on JKSPE, Jeju, Korea, 17–19 May 2017; pp. 711–712. [Google Scholar]
- Hwang, M.-J.; Bang, Y.-S.; Son, B.-Y. A Study of the Convenience of Elderly Facilities, Satisfaction of Convenient Facilities, Falls Efficacy and Activities of Daily Living of Senior Users of Walking Aid Living in Permanent Rental Apartments. J. Korea Entertain. Ind. Assoc. 2018, 12, 267–277. [Google Scholar] [CrossRef]
- Chung, J.H.; Lee, K.W.; Kim, Y.H. Development of a Pressure Distribution Measurement System. J. Biomed. Eng. Res. 2000, 21, 213–218. [Google Scholar]
- Jeong, S. Improving Sidewalk Design Standard in Seoul: Learning from the Foreign Standards. Seoul Stud. 2007, 8, 139–153. [Google Scholar]
- Kim, E.S.; Park, K.N. Development of Walking and Rehabilitation Assistance Device for Knee Joint. J. Rehabil. Welf. Eng. Assist. Technol. 2021, 15, 158–163. [Google Scholar] [CrossRef]
- Kang, Y.S.; Hong, C.U.; Han, J.K.; Yu, M.; Kwon, T.K. Safety Evaluation of Elevator-type Evacuation by Bio-Signal Analysis in Repeated Evacuation Training. J. Rehabil. Welf. Eng. Assist. Technol. 2021, 15, 164–171. [Google Scholar] [CrossRef]
- Choi, J.-S.; Kang, D.-W.; Mun, K.-R.; Bang, Y.-H.; Tack, G.-R. Comparison of Kinematic Factors between Old and Young People during Walking on Level and Uneven Inclined Surfaces. Korean J. Sport Biomech. 2010, 20, 33–39. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.Y.; Lee, D.K.; Goh, M.S.; Lee, E.H. The study of overcome the ramps for mobile walker. In Proceedings of the Conference on Journal of RWEAT, Goyang, Korea, 10–12 November 2011; pp. 167–170. [Google Scholar]
- Jang, H.M.; Sohn, J.W. Design of Prosthetic Robot Hand and Electromyography-Based Hand Motion Recognition. J. Korean Soc. Precis. Eng. 2020, 37, 339–345. [Google Scholar] [CrossRef]
- Kang, K.-H.; Hwan, K. The Study about Muscle Activities and ROM of Shoulder Joint according to Supination during External Rotation. J. Korean Soc. Wellness 2017, 12, 553–563. [Google Scholar] [CrossRef]
- Choi, H.-J.; Kang, S.-J.; Kwon, C.-Y.; Ryu, J.-C.; Lee, S.-M.; Mun, M.-S. Research of Elderly Gait-assistant-robot Control System. J. Inst. Control. Robot. Syst. 2010, 16, 823–826. [Google Scholar] [CrossRef] [Green Version]
- Cho, W.; Park, M.I.; Noh, C.G.; Park, B.J.; Kim, H.S. Gait Analysis of Stability according to the Inclination of the Ramps in elderly Adults. In Proceedings of the Conference on JKSPE, Jeju, Korea, 11–13 May 2016; pp. 879–880. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification |
|---|---|
| Caterpillar size | 100 50 45 |
| Frame material | SM25C |
| Track material | Ethylene propylene diene rubber |
| Characteristics | Subjects |
|---|---|
| Sex (Male:Female) | 5:7 |
| Age (Years) | |
| Height (cm) | |
| Weight (kg) |
| Items |
|---|
| Dimensions |
| Weight |
| Adjustments |
| Safety |
| Durability |
| Simplicity of use |
| Comfort |
| Effectiveness |
| FDS | BB | FDP | TB | TA | RF | GA | BF | |
|---|---|---|---|---|---|---|---|---|
| GTW | 16.51 3.5 (14.7, 13.1–18.8) | 11.43 3.4 (10.3, 7.3–14.4) | 34.07 4.3 (33.1, 26.8–43.8) | 28.38 4.5 (27.2, 23.1–33.2) | 23.11 2.5 (22.3, 17.9–26.7) | 23.95 2.7 (22.9, 16.5–27.9) | 26.01 3.5 (24.5, 19.7–32.1) | 27.86 4.1 (27.8, 20.8–34.1) |
| CTW | 12.15 3.4 (10.8, 6.9–16.2) * | 8.58 4.1 (7.8, 5.5–10.1) * | 29.31 4.1 (30.5, 21.1–35.9) * | 20.75 5.1 (20.3, 14.8–35.9) * | 18.20 2.3 (17.2, 11.2–23.6) * | 19.94 3.1 (19.8, 14.6–26.2) * | 17.89 2.7 (17.5, 13.5–20.4) * | 21.97 3.8 (21.7, 13.1–26.1) * |
| 1 cm | 2 cm | 3 cm | ||||
|---|---|---|---|---|---|---|
| GTW | CTW | GTW | CTW | GTW | CTW | |
| FDS | 14.41 2.4 (14.5, 11.9–16.7) | 12.80 2.7 (11.5, 8.9–15.3) | 20.28 2.5 (19.1, 13.4–25.9) | 12.12 2.8 (11.5, 8.9–15.3) | 22.17 2.6 (20.8, 16.1–26.0) | 11.95 2.8 (11.09, 7.0–15.1) |
| BB | 10.23 3.4 (11.3, 8.4–13.7) | 6.19 2.4 (4.8, 3.4–8.1) | 16.18 3.1 (16.5, 13.2–18.6) | 6.29 2.7 (4.8, 3.4–8.1) | 17.68 2.5 (15.6, 10.1–23.8) | 6.78 2.7 (6.9, 4.5–9.0) |
| FDP | 19.34 2.1 (19.3, 14.9–22.7) | 18.8 3.1 (14.7, 18.5–21.5) | 24.23 3.1 (24.5, 18.0–29.3) | 19.03 4.1 (18.6, 14.8–21.5) | 24.92 2.7 (24.6, 19.7–30.2) | 20.84 4.1 (21.0, 16.6–24.1) |
| TB | 13.92 3.7 (14.1, 11.7–16.6) | 11.09 3.5 (9.0, 5.7–16.8) | 21.81 3.8 (22.1, 18.4–26.3) | 11.28 4.5 (9.5, 5.8–16.7) | 23.19 3.8 (22.42, 20.2–26.3) | 11.94 4.5 (11.9, 8.57–14.9) |
| TA | 12.29 3.4 (12.1, 10.4–14.8) | 10.37 2.8 (9.8, 6.1–12.8) | 17.89 4.1 (17.7, 15.9–19.4) | 10.34 4.1 (10.0, 6.2–12.8) | 19.22 4.1 (18.6, 14.1–24.4) | 14.73 4.1 (13.5, 13.1–16.1) |
| RF | 16.40 4.1 (16.3, 14.9–18.7) | 14.38 2.7 (14.3, 9.1–18.5) | 17.32 4.5 (16.6, 12.5–21.3) | 14.56 4.3 (14.38, 9.2–18.4) | 17.33 4.5 (18.24, 12.97–21.0) | 15.68 4.3 (14.6, 11.6–19.5) |
| GA | 16.6 2.8 (16.9, 13.7–20.6) | 15.1 3.1 (13.2, 15.1–19.1) | 19.62 3.4 (19.4, 15.9–22.9) | 15.45 2.4 (15.0, 12.0–19.1) | 21.82 3.4 (20.3, 17.8–24.4) | 16.17 2.4 (15.5, 12.1–19.5) |
| BF | 17.5 3.4 (17.4, 15.4–20.8) | 15.45 4.1 (14.2, 10.1–19.8) | 20.46 3.5 (19.6, 17.1–23.8) | 15.42 2.5 (14.29, 10.2–19.5) | 21.48 3.5 (22.1, 15.1–26.1) | 17.2 22.5 (16.9, 12.5–20.2) |
| Uphill | Downhill | |||||||
|---|---|---|---|---|---|---|---|---|
| GTW | CTW | GTW | CTW | GTW | CTW | GTW | CTW | |
| FDS | 13.80 2.55 (12.9, 9.9–16.8) | 13.46 3.65 (12.7, 6.7–18.3) | 14.21 3.75 (14.0, 12.1–16.0) | 13.86 2.77 (13.7, 11.4–16.7) | 13.69 1.56 (13.6, 10.8–15.9) | 11.50 1.63 (10.0, 5.5–15.4) * | 15.39 2.53 (15.7, 12.8–17.1) | 11.25 2.31 (10.5, 6.8–14.5) * |
| BB | 6.28 1.36 (5.6, 4.4–7.8) | 5.39 1.32 (5.1, 3.6–6.8) | 6.96 1.23 (6.9, 4.7–8.7) | 6.24 1.68 (5.0, 10.6–22.2) | 6.53 2.12 (5.5, 3.9–9.7) | 4.34 1.47 (3.8, 2.4–6.0) * | 8.80 1.21 (8.1, 5.5–12.0) # | 4.46 1.73 (3.9, 2.3–6.4) * |
| FDP | 18.36 3.21 (16.9, 15.5–20.2) | 15.19 2.55 (13.9, 11.3–18.3) * | 20.09 4.75 (20.0, 12.7–25.7) | 16.57 2.37 (15.8, 10.6–22.2) * | 18.57 3.54 (17.4, 14.5–21.8) | 18.08 3.55 (16.9, 9.9–23.8) | 19.67 3.52 (19.4, 16.2–23.0) # | 18.98 2.61 (18.9, 13.0–26.1) |
| TB | 20.40 2.25 (17.8, 15.2–25.7) | 15.38 3.21 (14.3, 12.5–18.6) * | 22.20 2.52 (21.2, 17.9–25.2) # | 16.51 2.05 (16.6, 16.3–18.8) * | 14.37 2.34 (14.8, 10.8–17.4) | 12.75 3.25 (11.8, 10.5–17.2) | 14.69 2.04 (14.7, 11.3–17.7) | 13.11 1.68 (12.3, 10.4–15.1) |
| TA | 20.06 2.72 (19.2, 15.2–25.3) | 15.04 3.41 (14.6, 11.4–19.1) * | 23.60 2.57 (22.9, 19.5–25.2) | 17.48 3.13 (17.2, 11.4–20.6) * | 15.14 3.55 (14.7, 9.2–18.5) | 12.41 2.56 (11.5, 6.9–16.6) * | 17.06 2.64 (16.7, 13.6–18.8) | 12.03 3.12 (12.4, 7.1–16.3) * |
| RF | 19.93 3.41 (20.7, 14.6–25.1) | 16.90 3.13 (17.21, 10.8–20.2) * | 24.58 4.41 (23.5, 19.6–29.2) | 20.94 2.12 (19.7, 14.1–29.2) * | 24.00 4.14 (23.1, 18.2–32.1) | 20.46 3.11 (19.8, 12.5–28.1) * | 24.54 2.82 (25.7, 17.7–31.0) | 21.06 3.31 (20.8, 16.3–23.2) * |
| GA | 23.44 2.22 (22.1, 16.9–29.1) | 18.70 3.34 (17.4, 14.7–20.3) * | 25.34 3.05 (24.8, 21.2–28.4) | 19.90 2.81 (19.7, 17.2–22.8) * | 23.04 2.35 (22.4, 18.9–26.1) | 18.24 2.25 (17.7, 14.1–20.1) * | 24.49 2.14 (23.7, 21.6–27.4) | 19.01 2.04 (18.2, 16.2–21.1) * |
| BF | 22.75 2.35 (23.1, 18.3–27.1) | 17.70 3.44 (17.4, 14.7–20.3) * | 24.75 3.1 (23.5, 21.3–29.1) | 18.80 3.61 (17.5, 14.6–22.5) * | 20.99 3.05 (21.7, 14.9–26.0) | 18.04 2.54 (18.6, 12.1–22.9) * | 21.03 2.59 (19.9, 13.5–24.8) | 18.09 3.25 (18.1, 14.8–21.5) * |
| 1 cm | 2 cm | 3 cm | Average Obstacle Overcoming Rate | |
|---|---|---|---|---|
| GTW | 30/36 (83%) | 0/36 (0%) | 0/36 (0%) | 27% |
| CTW | 36/36 (100%) | 36/36 (100%) * | 36/36 (100%) * | 100% |
| Uneven Terrain | Obstacle Terrain | Sloped Terrain | ||||
|---|---|---|---|---|---|---|
| Uphill | Downhill | |||||
| 10 | 20 | 10 | 20 | |||
| GTW | 0.31 0.08 (0.3, 0.2–0.4) | 0.26 0.05 (0.2, 0.1–0.3) | 0.52 0.07 (0.5, 0.3–0.6) | 0.43 0.04 (0.4, 0.3–0.5) | 0.53 0.11 (0.5, 0.4–0.5) | 0.44 0.01 (0.4, 0.4–0.6) |
| CTW | 0.42 0.02 (0.4, 0.3–0.4) * | 0.45 0.12 (0.4, 0.4–0.5) * | 0.40 0.08 (0.4, 0.3–0.4) * | 0.34 0.03 (0.3, 0.3–0.4) * | 0.39 0.04 (0.4, 0.3–0.4) * | 0.41 0.05 (0.4, 0.3–0.4) * |
| Item | GTW | CTW |
|---|---|---|
| Dimensions | 4.33 0.88 (5, 3.25–5) | 4.33 1.23 (5, 4–5) |
| Weight | 4.08 0.9 (4, 3–5) | 4.08 0.99 (4, 3.2–5) |
| Adjustments | 4.08 1.08 (4.5, 3–5) | 4.75 0.62 (5, 5–5) |
| Safety | 3.67 0.88 (3, 3–4.7) | 4.83 0.38 (5, 5–5) * |
| Durability | 3.92 0.9 (4, 3–5) | 4.67 0.65 (5, 4.2–5) * |
| Simplicity of use | 4.08 0.99 (4, 3.2–5) | 4.83 0.71 (5, 5–5) * |
| Comfort | 3.75 1.13 (4, 3–5) | 5.00 0.73 (5, 5–5) * |
| Effectiveness | 3.67 0.98 (3.5, 3–4.7) | 5.00 0.11 (5, 4.2–5) * |
| Average | 4.69 | 3.95 |
| Item | Cronbach’s Alpha |
|---|---|
| Dimensions | 0.882 |
| Weight | 0.869 |
| Adjustments | 0.851 |
| Safety | 0.849 |
| Durability | 0.833 |
| Simplicity of use | 0.832 |
| Comfort | 0.823 |
| Effectiveness | 0.846 |
| Average | 0.814 |
| Item | Frequency | Ratio (%) | Ranking |
|---|---|---|---|
| Effectiveness | 12 | 33% | 1 |
| Comfort | 11 | 30% | 2 |
| Safety | 7 | 20% | 3 |
| Simplicity of use | 5 | 14% | 4 |
| Dimensions | 1 | 3% | 5 |
| Weight | 0 | 0% | 6 |
| Adjustments | 0 | 0% | 6 |
| Durability | 0 | 0% | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.-K.; Yang, C.-M.; Kim, S.; Jung, J.-Y.; Kim, J.-J. Development of a Caterpillar-Type Walker for the Elderly People. Appl. Sci. 2022, 12, 383. https://doi.org/10.3390/app12010383
Lee Y-K, Yang C-M, Kim S, Jung J-Y, Kim J-J. Development of a Caterpillar-Type Walker for the Elderly People. Applied Sciences. 2022; 12(1):383. https://doi.org/10.3390/app12010383
Chicago/Turabian StyleLee, Yeon-Kyun, Chang-Min Yang, Sol Kim, Ji-Yong Jung, and Jung-Ja Kim. 2022. "Development of a Caterpillar-Type Walker for the Elderly People" Applied Sciences 12, no. 1: 383. https://doi.org/10.3390/app12010383