
Application of Improved MFDFA and D-S Evidence Theory in Fault Diagnosis


Abstract
:1. Introduction
2. Theoretical Basis
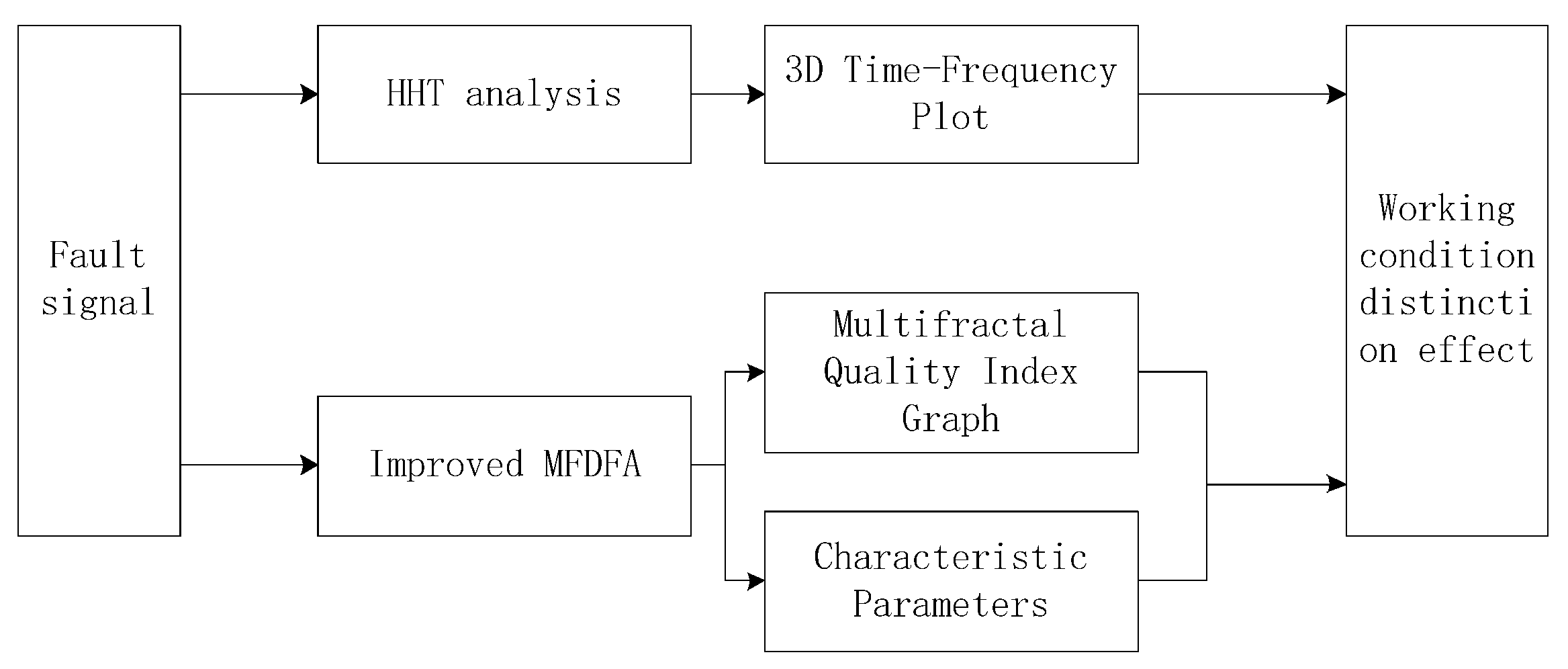
2.1. Improved MFDFA Method
2.2. D-S Evidence Theory
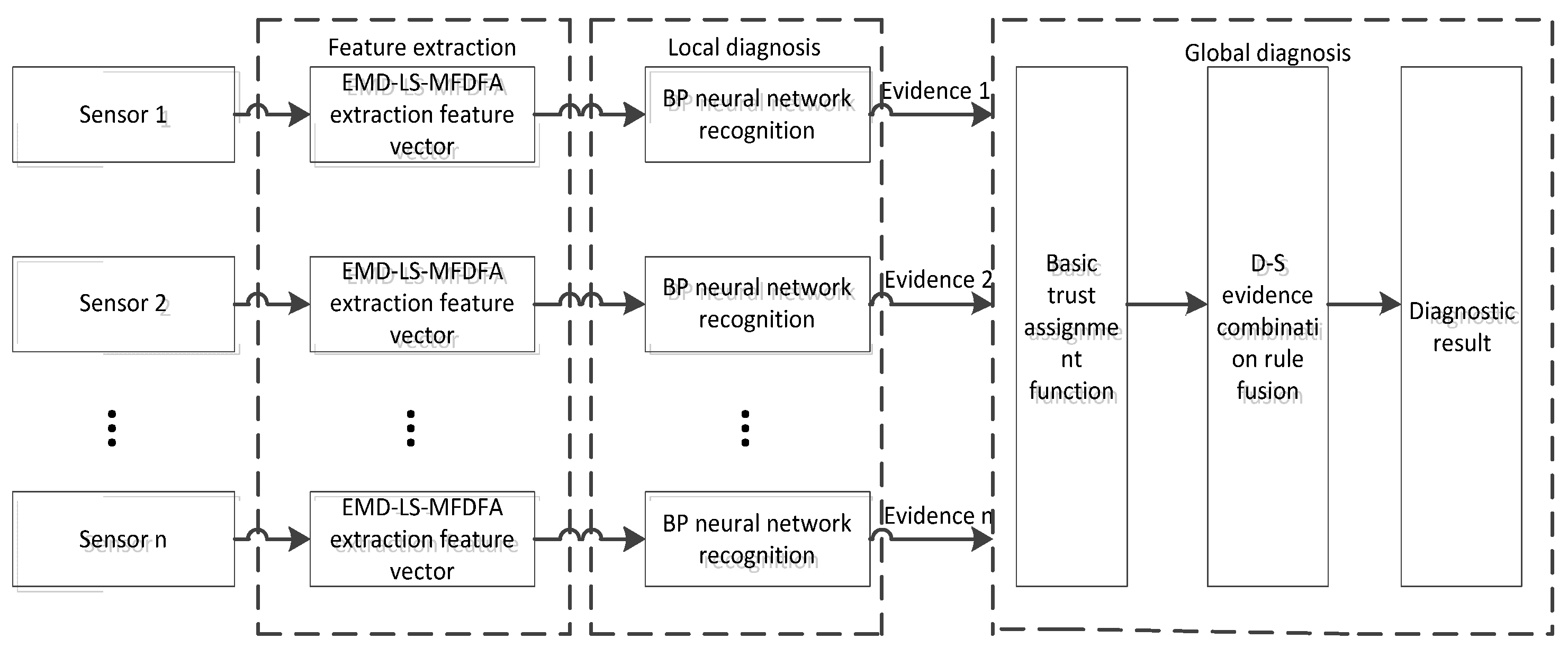
3. Test Device and Multi-Sensor Fault Diagnosis Model
4. Test Analysis
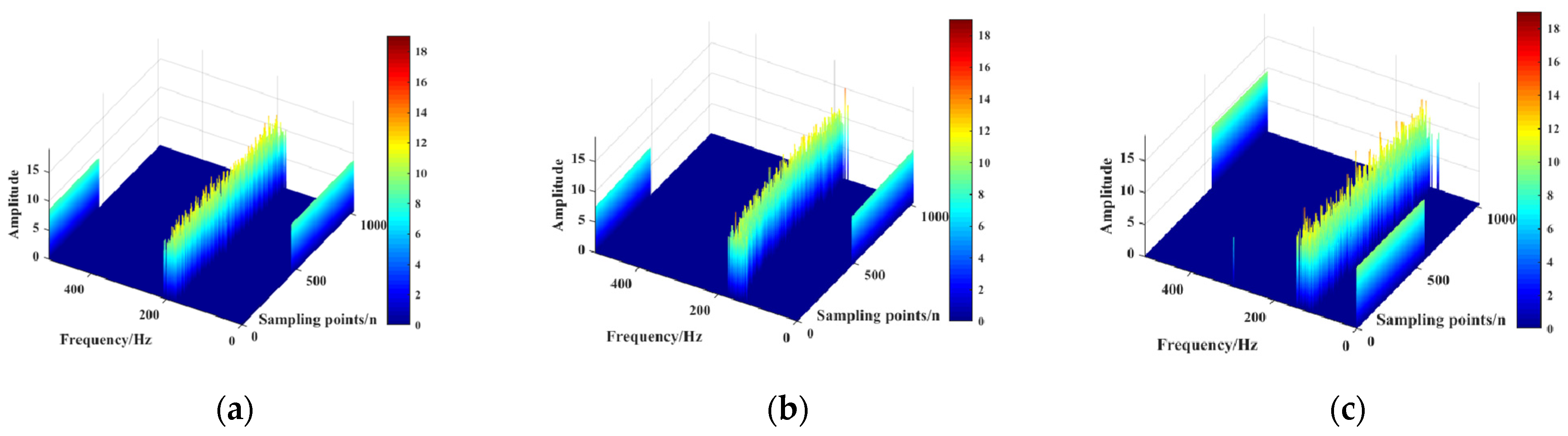
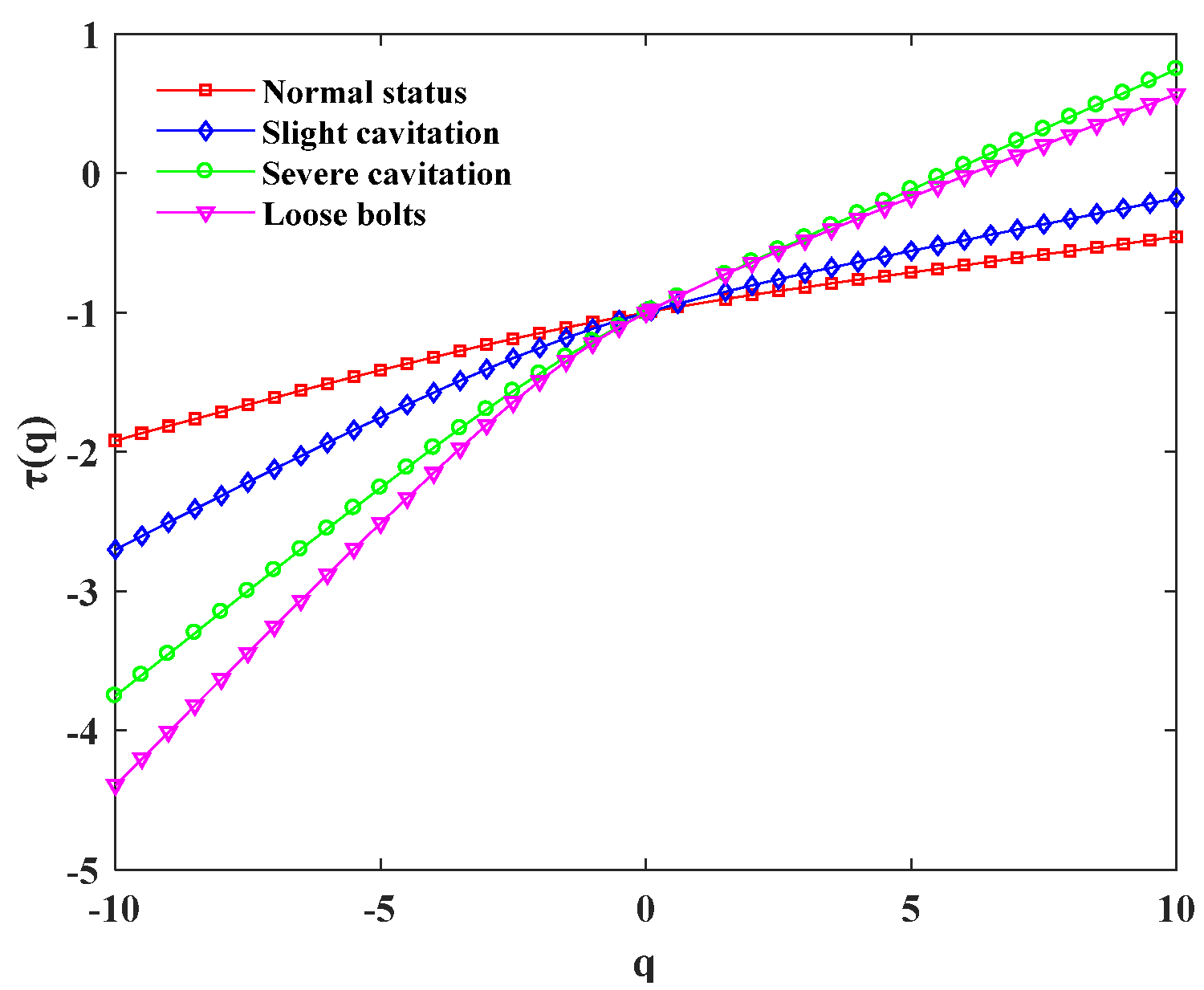
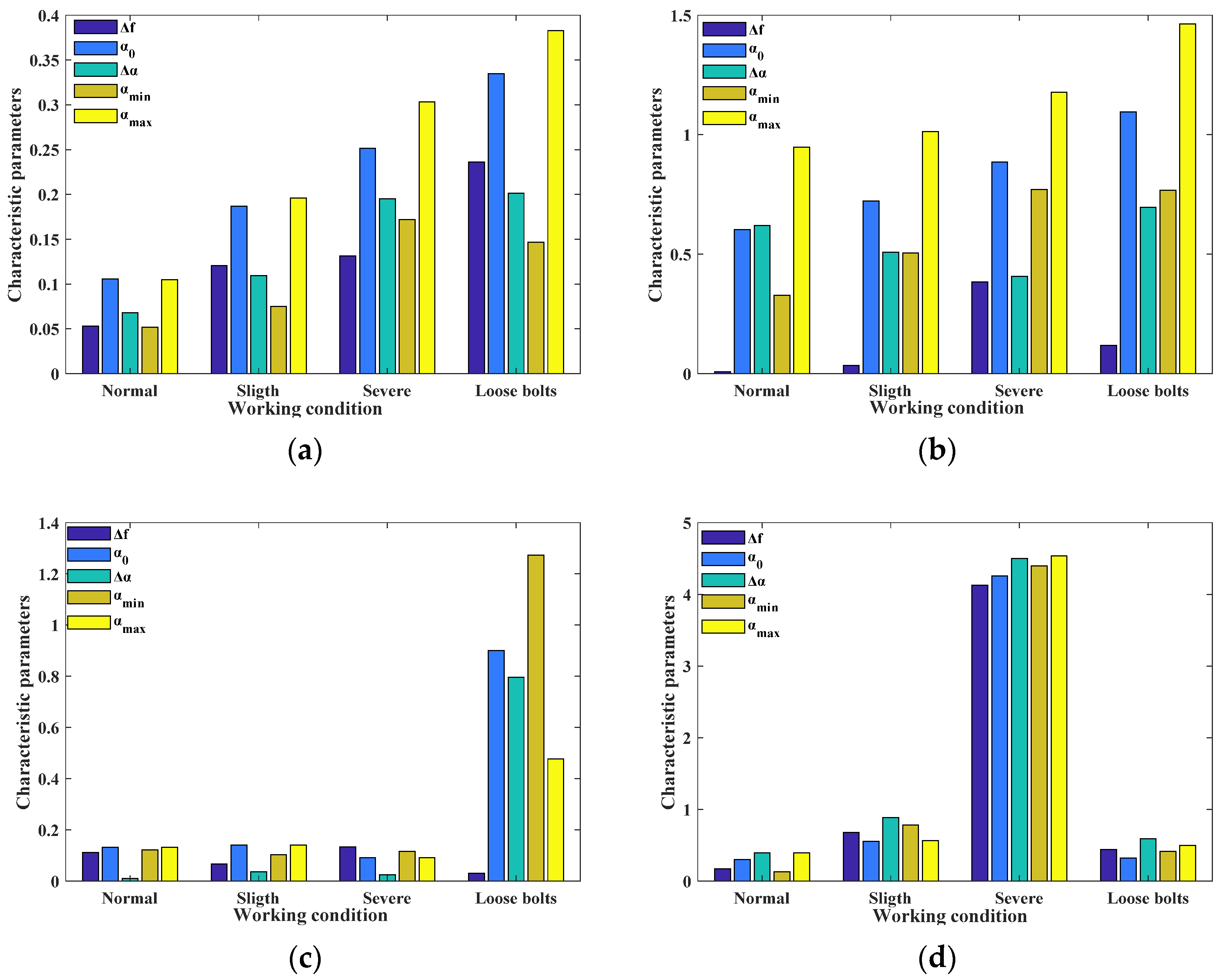
4.1. Analysis of Fault Characteristic Data
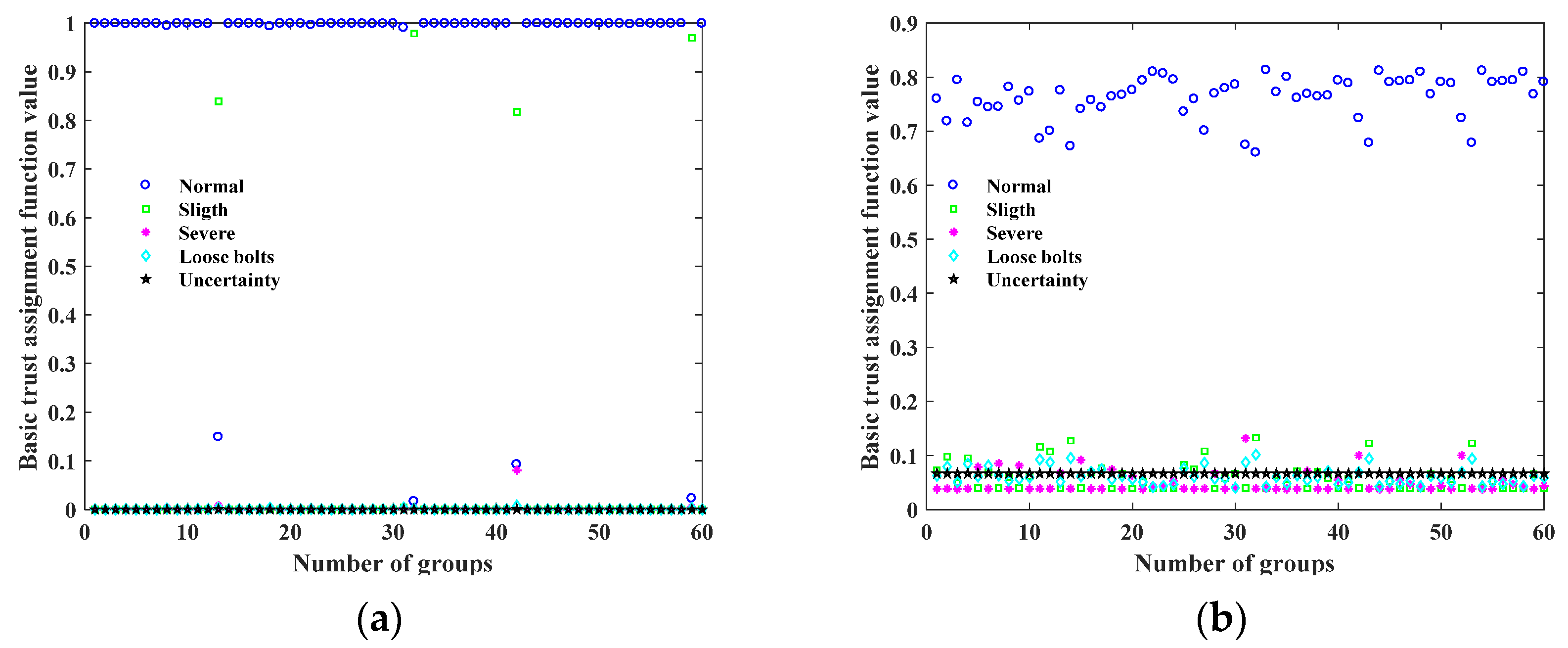
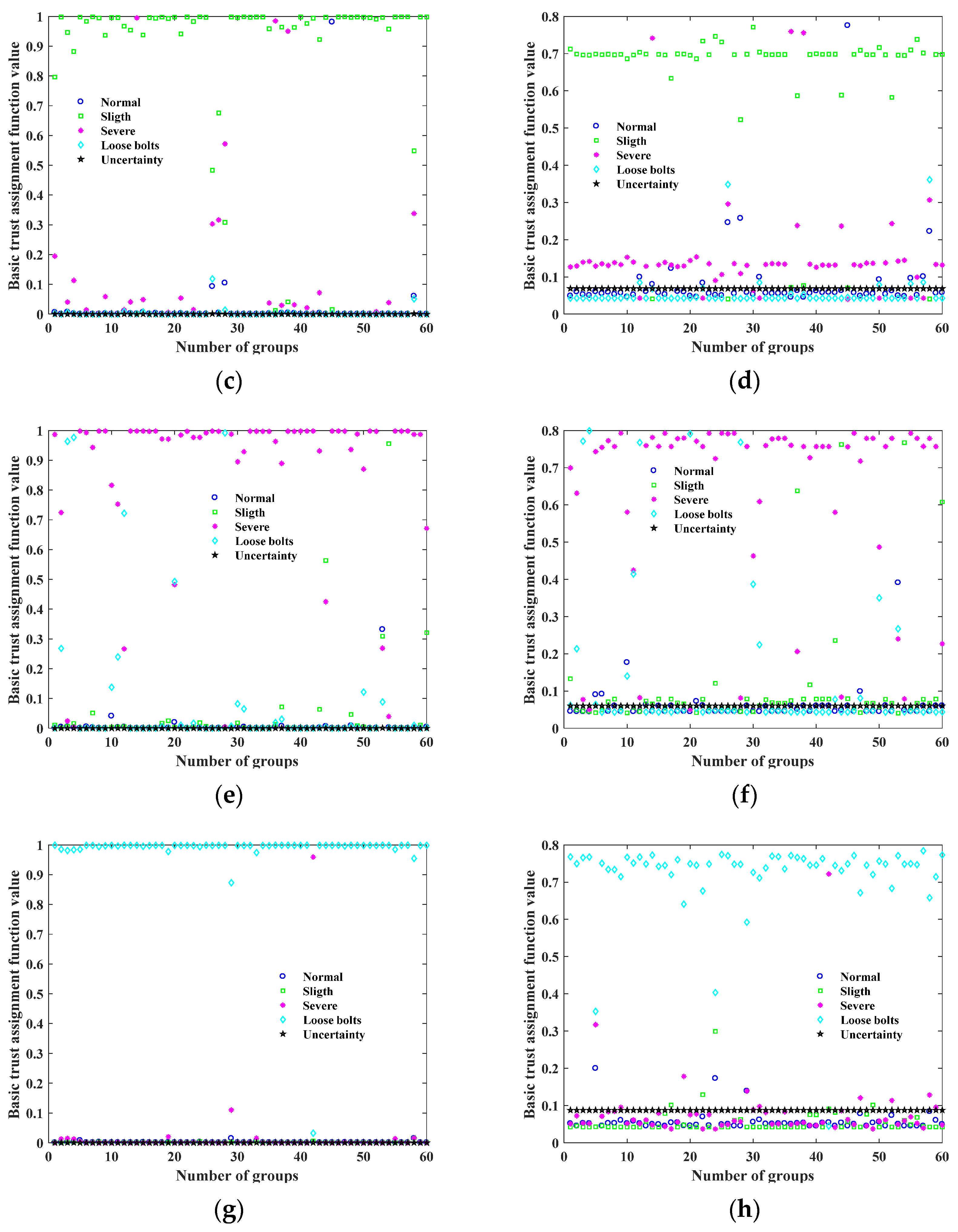
4.2. D-S Fusion Fault Diagnosis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jiang, W.; Xie, C.H.; Zhuang, M.Y.; Shou, Y.H.; Tang, Y.C. Sensor data fusion with Z-numbers and its application in fault diagnosis. Sensors 2016, 16, 1509. [Google Scholar] [CrossRef] [PubMed]
- Morsy, M.E.; Abouel-Seoud, A.; Rabeih, E.A. Gearbox damage diagnosis using wavelet transform technique. Acoust. Vib. 2011, 16, 173–179. [Google Scholar]
- Huang, M.; Liu, Z. Research on mechanical fault prediction method based on multifeature fusion of vibration sensing data. Sensors 2019, 20, 6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pei, J.F.; Yan, A.; Peng, J.; Zhao, J.X. Fault diagnosis of reciprocating pump based on acoustic signal Mfdfa and SFLA-SVM Algorithms. Mach. Des. Manuf. 2020, 26, 199–203, 207. [Google Scholar]
- Kantelhardt, J.W.; Zschiegner, S.A.; Koscielny, B.E.; Havlin, S.; Bunde, A.; Stanley, H.E. Multifractal detrended fluctuation analysis of nonstationary time series. Phys. A Stat. Mech. Appl. 2002, 316, 87–114. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.Q.; Wang, F.L.; Xiao, H.; Yu, H.; Dong, S.J. A fault diagnosis model based on singular value manifold features optimized SVMs and multi-sensor information fusion. Meas. Sci. Technol. 2020, 31, 095002. [Google Scholar] [CrossRef]
- Li, Y.; Chen, J.; Ye, F.; Liu, D. The improvement of DS evidence theory and its application in IR/MMW target recognition. Sensors 2016, 16, 1903792. [Google Scholar] [CrossRef] [Green Version]
- Yu, K.; Tan, J.W.; Li, S. Rolling bearing fault diagnosis research based on multi-sensor information fusion. Instrum. Tech. Sens. 2016, 45, 97–102. [Google Scholar]
- Mcdonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Yi, B.L. Improvement of DS evidence theory for multi-sensor conflicting information. Symmetry 2017, 9, 69. [Google Scholar] [CrossRef] [Green Version]
- Kracik, J.; Lavicka, H. Fluctuation analysis of high frequency electric power load in the Czech Republic. Phys. A Stat. Mech. Appl. 2016, 462, 951–961. [Google Scholar] [CrossRef] [Green Version]
- Xi, C.P.; Zhang, S.N. Comparison analysis of fractal spectrum algorithm of multifractal falling trend analysis method and moving average method. Acta Phys. Sin. 2015, 64, 335–348. [Google Scholar]
- Martínez, J.L.M.; Segovia, D.I.; Rodriguez, I.Q.; Horta, R.F.A.; Sosa, G.G. A modified multifractal detrended fluctuation analysis (MFDFA) approach for multifractal analysis of precipitation. Phys. A Stat. Mech. Appl. 2021, 565, 125611. [Google Scholar] [CrossRef]
- Chatterjee, S.; Pratiher, S.; Bose, R. Multifractal detrended fluctuation analysis based novel feature extraction technique for automated detection of focal and non-focal electro-encephalogram signals. IET Sci. Meas. Technol. 2017, 11, 1014–1021. [Google Scholar] [CrossRef]
- Huang, D.Z.; Gong, R.X.; Gong, S. Prediction of wind power by chaos and BP artificial neural networks approach based on genetic algorithm. Electr. Eng. Technol. 2015, 10, 41–46. [Google Scholar] [CrossRef] [Green Version]
- Dong, Z.; Zhang, X.; Modified, D.-S. Evidential theory in hydraulic system fault diagnosis. J. Taiyuan Univ. Sci. Technol. 2011, 11, 98–102. [Google Scholar]
- Jiang, Z.; Wu, Y.; Li, J. Application of EMD and 1.5-dimensional spectrum in fault feature extraction of rolling bearing. J. Eng. 2019, 2019, 8843–8847. [Google Scholar] [CrossRef]
- Yang, D.; Zhang, C.; Liu, Y. Multifractal characteristic analysis of near-fault earthquake ground motions. Soil Dyn. Earthq. Eng. 2015, 72, 12–23. [Google Scholar] [CrossRef]
- Long, Y.; Xie, Q.M.; Zhong, M.S.; Lu, L.; Li, X.-H. Research on trend removing methods in preprocessing analysis of blasting vibration monitoring signals. Eng. Mech. 2012, 29, 63–68. [Google Scholar]
- Tang, Y.; Zhou, D.; He, Z. An improved belief entropy based uncertainty management approach for sensor data fusion. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Sun, W.; Chen, J.; Li, J. Decision tree and PCA-based fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2007, 21, 1300–1317. [Google Scholar] [CrossRef]
- Ouyang, N.; Liu, Z.; Kang, H.Y. A method of distributed decision fusion based on SVM and D-S evidence theory. In Proceedings of the International Conference on Visual Information Engineering, Xi’an, China, 29 July–1 August 2008. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | Normal State | Slight Cavitation | Severe Cavitation | Loose Foot Bolts |
|---|---|---|---|---|
| Pump vibration | 1.0000 | 0.0000 | 0.0000 | 0.0000 |
| 0.0000 | 0.9333 | 0.0667 | 0.0000 | |
| 0.0000 | 0.0917 | 0.8417 | 0.0667 | |
| 0.0000 | 0.0000 | 0.0417 | 0.9583 | |
| Torque | 0.9583 | 0.0333 | 0.0000 | 0.0083 |
| 0.0083 | 0.9333 | 0.0417 | 0.0167 | |
| 0.0000 | 0.0667 | 0.8750 | 0.0583 | |
| 0.0000 | 0.0083 | 0.0333 | 0.9583 | |
| Motor vibration | 0.9500 | 0.0417 | 0.0083 | 0.0000 |
| 0.0083 | 0.9417 | 0.0500 | 0.0000 | |
| 0.0083 | 0.0500 | 0.8833 | 0.0583 | |
| 0.0000 | 0.0000 | 0.0167 | 0.9833 | |
| Swing | 0.9583 | 0.0250 | 0.0167 | 0.0000 |
| 0.0083 | 0.8333 | 0.1583 | 0.0000 | |
| 0.0000 | 0.0417 | 0.8667 | 0.0917 | |
| 0.0000 | 0.0000 | 0.0083 | 0.9917 |
| Signal | Local Credibility | Global Credibility | |||
|---|---|---|---|---|---|
| Normal State | Slight Cavitation | Severe Cavitation | Loose Foot Bolts | ||
| Pump vibration | 1.0000 | 0.9914 | 0.9828 | 0.9914 | 0.9333 |
| Torque | 0.9106 | 0.8960 | 0.9113 | 0.9259 | 0.9313 |
| Motor vibration | 0.8860 | 0.9211 | 0.9217 | 0.8254 | 0.9396 |
| Swing | 0.9350 | 0.9200 | 0.9440 | 0.9154 | 0.9125 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Luo, Y.; Deng, F.; Li, Y. Application of Improved MFDFA and D-S Evidence Theory in Fault Diagnosis. Appl. Sci. 2022, 12, 4976. https://doi.org/10.3390/app12104976
Liang X, Luo Y, Deng F, Li Y. Application of Improved MFDFA and D-S Evidence Theory in Fault Diagnosis. Applied Sciences. 2022; 12(10):4976. https://doi.org/10.3390/app12104976
Chicago/Turabian StyleLiang, Xing, Yuanxing Luo, Fei Deng, and Yan Li. 2022. "Application of Improved MFDFA and D-S Evidence Theory in Fault Diagnosis" Applied Sciences 12, no. 10: 4976. https://doi.org/10.3390/app12104976