
The Impact of COVID on Lower-Limb Exoskeleton Robotic System Patents—A Review

 ,
,  ,
,  , , , ,
, , , ,
Abstract
:1. Introduction
2. Review Methodology
2.1. Search Strategy
2.1.1. Inclusion Criteria
- Filter 1: published in or translated to English and directly related to rehabilitation of lower-limb exoskeletons robot systems.
- Filter 2: related to the International Patent Classification (IPC) A61H3/00—appliances for aiding patients or disabled persons to walk about; A61F 5/0102—orthopedic devices for correcting deformities of, or supporting, limbs; A61F 5/0106—for the knees, A61F 5/0111—for the feet or ankles.
- Filter 3: describing the design, manufacturing method, and control of an exoskeleton.
- Filter 4: able to be registered in any patent office in any country.
- Filter 5: granted.
- Filter 6: in the COVID-19 pandemic period 12 March 2020–12 March 2022.
2.1.2. Exclusion Criteria
- Filter 7: patent application or limited patent.
- Filter 8: inactive, discontinued or pending legal status.
- Filter 9: related to upper rehabilitation limb (hand or arm) exoskeletons robot systems.
- Filter 10: published in a non-English language and those whose translations to English were very inadequate.
- Filter 11: with an application date before 2012.
2.1.3. Information Databases and Search Methodology
2.2. Data Collection
2.3. Analysis Method
3. Results
3.1. Google Patents Platform
- − Treatment of the entire lower system
- − Partial treatment of the lower system (its different subsystems).
3.2. PatentScope Platform
3.3. Lens Platform
4. Discussion
4.1. The Context of the Main Objective Analysis
4.2. General Discussion on the Results of the Analysis of the Patent Platforms
4.3. Limitations of This Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PExo_t | Patent of the total (treats the whole leg) exoskeleton robot system of the lower limb |
| PExo_p | Patent of the partial (treats a specific part of the foot) exoskeleton robot system of the lower limb |
| PExoRP | Patent involving exoskeleton with rigid structure and is portable |
| PExoRPW | Patent involving rigid structure exoskeleton, is portable and has a pair/pairs of auxiliary wheels |
| PExoRNP | Patent involving exoskeleton with rigid structure and is non-portable |
| PexoS | Patent involving exoskeleton suit |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cite | Country Code | Title | Type of Treatment | Type of Structure | Application Date | Publication Date |
|---|---|---|---|---|---|---|
| [33] | US | Gait device with a crutch | PExo_t | Rigid portable | 17 January 2013 | 27 November 2018 |
| [34] | US | Patient aid devices, particularly for mobile upper extremity support in railed devices such as parallel bars and treadmills | PExo_t | Rigid portable | 23 October 2017 | 14 April 2020 |
| [35] | US | Recognition method of human walking speed intention from surface electromyogram signals of plantar flexor and walking speed control method of a lower-limb exoskeleton robot | PExo_t | Rigid non-portable | 20 January 2016 | 08 October 2019 |
| [36] | KR | Walk assist apparatus | PExo_t | Rigid portable | 02 April 2012 | 03 March 2014 |
| [37] | KR | Wearable crutch with lap joints | PExo_t | Rigid portable | 20 August 2013 | 23 June 2015 |
| [38] | US | Interactive exoskeleton robotic knee system | PExo_p | Rigid portable | 21 June 2015 | 27 August 2019 |
| [39] | KR | Active type step assistance apparatus | PExo_t | Rigid portable | 09 July2013 | 12 December 2014 |
| [40] | US | Low-profile exoskeleton | PExo_t | Rigid portable | 05 November 2015 | 18 February 2020 |
| [41] | US | Multi-function lower-limb ambulation rehabilitation and walking assist device | PExo_t | Rigid non-portable | 29 September 2016 | 17 October 2017 |
| [42] | CN | For aiding in the soft machine armor of human motion | PExo_t | Rigid portable | 30 May 2014 | 04 May 2018 |
| [43] | CN | Soft exterior protector for aiding in human motion | PExo_t | Suit | 17 September 2013 | 09 June 2017 |
| [44] | KR | Gait assistant robot | PExo_t | Rigid portable with wheels | 08 November 2013 | 13 September 2016 |
| [45] | KR | Robot for assisting user to walk | PExo_t | Rigid portable with wheels | 10 May 2017 | 20 May 2019 |
| [46] | ES | System to assist walk | PExo_t | Rigid portable | 19 November 2015 | 06 April 2018 |
| [47] | KR | Robot for assisting user to walk with lower body exoskeleton | PExo_t | Rigid portable with wheels | 25 March 2016 | 21 June 2018 |
| [48] | CN | Rehabilitation type lower-limb exoskeleton | PExo_t | Rigid portable | 07 August 2018 | 13 March 2020 |
| [49] | US | Exoskeleton ankle robot | PExo_p | Rigid portable | 21 June 2015 | 01 October 2019 |
| [50] | US | Mobility system including an exoskeleton assembly releasably supported on a wheeled base | PExo_t | Rigid portable with wheels | 01 November 2013 | 26 December 2017 |
| [51] | KR | Rehabilitation robot of legs, boarding and driving method thereof | PExo_t | Rigid portable with wheels | 29 June 2018 | 12 March 2019 |
| [52] | ES | Support structure | PExo_t | Rigid portable with wheels | 18 February 2016 | 08 May 2020 |
| [53] | CN | Wearable lower-limb exoskeleton driven by lasso artificial muscles | PExo_t | Rigid portable | 26 July 2017 | 03 November 2020 |
| [54] | ES | Exoskeleton for human movement assistance | PExo_t | Rigid portable | 27 November 2014 | 06 April 2017 |
| [55] | CN | A kind of lower-limb rehabilitation exoskeleton system and its walking control method | PExo_t | Rigid portable | 15 January 2018 | 09 July 2019 |
| [56] | KR | Wearable apparatus for support holding posture | PExo_t | Rigid portable | 22 April 2016 | 04 September 2017 |
| [57] | US | Pneumatic lower extremity gait rehabilitation training system | PExo_p | Rigid non-portable | 12 September 2016 | 21 May 2019 |
| [58] | US | Systems, methods, and devices for assisting walking for developmentally delayed toddlers | PExo_t | Rigid portable | 05 February 2015 | 07 May 2019 |
| [59] | CN | Variable-rigidity flexible driver for exoskeleton type lower-limb rehabilitation robot | PExo_t | Rigid non-portable | 02 February 2018 | 06 December 2019 |
| [60] | US | Actuation system for a joint | PExo_p | Rigid portable | 13 March 2014 | 22 November 2016 |
| [61] | CN | Lower-limb rehabilitation training exoskeleton system and its walking control method and hip joint structure | PExo_t | Rigid portable | 28 January 2018 | 20 September 2019 |
| [62] | KR | Weight bearing brace | PExo_t | Rigid non-portable | 12 December 2017 | 08 July 2019 |
| [63] | KR | Training system for leg rehabilitation having separated treadmill | PExo_t | Rigid non-portable | 11 October 2011 | 17 June 2013 |
| [64] | CN | Wearable lower-limb exoskeleton rehabilitation robot | PExo_t | Rigid portable | 16 November 2017 | 21 February 2020 |
| [65] | US | Lower extremity exoskeleton for gait retraining | PExo_t | Rigid portable | 28 September 2012 | 01 December 2015 |
| [66] | CN | A kind of bionical lower-limb exoskeleton robot driven based on rope | PExo_t | Rigid portable | 06 March 2017 | 02 August 2019 |
| [67] | CN | Movable parallel flexible cable driven lower-limb rehabilitation robot and implementation method thereof | PExo_t | Rigid portable with wheels | 02 May 2018 | 18 February 2020 |
| [68] | CN | Wearable lower-limb exoskeleton robot | PExo_t | Rigid portable | 31 August 2016 | 14 August 2018 |
| [69] | EP | Robotic device for assistance and rehabilitation of lower limbs | PExo_t | Rigid portable | 07 October2013 | 21 December 2016 |
| [70] | US | Admittance shaping controller for exoskeleton assistance of the lower extremities | PExo_t | Rigid portable | 25 June 2015 | 06 March 2018 |
| [71] | CN | Exoskeleton-type moves walking rehabilitation training device and method | PExo_t | Rigid portable with wheels | 28 December 2015 | 01 February 2019 |
| [72] | CN | Based on rope-pulley mechanism drive lacking lower-limb assistance exoskeleton robot | PExo_t | Rigid non-portable | 03 July2017 | 17 May 2019 |
| [73] | EP | Method for estimating posture of robotic walking aid | PExo_t | Rigid portable | 21 July2016 | 17 March 2021 |
| [74] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_p | Rigid portable | 01 September 2009 | 16 April 2013 |
| [75] | CN | A kind of dedicated power-assisted healing robot of single lower-limb individuals with disabilities | PExo_t | Rigid non-portable | 24 July 2017 | 27 September 2019 |
| [76] | JP | Actuator device, power assist robot and humanoid robot | PExo_t | Rigid portable | 12 September 2014 | 20 April 2016 |
| [77] | KR | Monitoring system of walking balance for lower-limb rehabilitation | PExo_t | Rigid non-portable | 29 December 2017 | 26 August 2019 |
| [78] | US | Powered lower-limb devices and methods of control thereof | PExo_t | Rigid portable | 03 November 2017 | 07 December 2021 |
| [79] | CN | A kind of artificial intelligence motion’s auxiliary equipment | PExo_t | Rigid non-portable | 29October 2015 | 29 March 2017 |
| [80] | JP | Actuator device, humanoid robot and power assist device | PExo_t | Rigid portable | 26 December 2014 | 30 November 2016 |
| [81] | US | Robotic system for simulating a wearable device and method of use | PExo_t | Rigid non-portable | 20 December 2012 | 22 November 2016 |
| [82] | US | Passive swing assist leg exoskeleton | PExo_t | Rigid non-portable | 04 April 2008 | 02 December 2014 |
| [83] | EP | Forward or rearward oriented exoskeleton | PExo_t | Rigid portable | 06 May 2015 | 19 January 2022 |
| [84] | US | Apparatus and system for limb rehabilitation | PExo_t | Rigid portable with wheels | 29 November 2018 | 03 December 2019 |
| [85] | ES | Movement assist device | PExo_t | Rigid portable | 17 June 2013 | 15 July 2020 |
| [86] | CN | Sitting type walking rehabilitation robot | PExo_t | Rigid non-portable | 28 October 2015 | 12 January 2021 |
| [87] | EP | Human movement research, therapeutic, and diagnostic devices, methods, and systems | PExo_t | Rigid non-portable | 21 April 2015 | 03 July 2019 |
| [88] | CN | Hip joint rehabilitation exoskeleton based on multifunctional driver and motion control method thereof | PExo_t | Rigid portable | 16 October 2018 | 23 February 2021 |
| [89] | US | Wearable robot and control method thereof | PExo_t | Rigid portable | 02 December 2014 | 12 February 2019 |
| [90] | US | Wearable robot and method for controlling the same | PExo_t | Rigid portable | 03 September 2014 | 11 February 2020 |
| [91] | CN | A kind of link-type lower-limb exoskeleton rehabilitation robot | PExo_t | Rigid portable | 22 May 2017 | 26 June 2018 |
| [92] | JP | Exoskeleton robot | PExo_t | Rigid portable | 13 April 2018 | 29 July 2020 |
| [93] | CN | Interface for the movement by externally applied force motivation of adjustment orthopedic appliance | PExo_t | Rigid portable | 15 January 2014 | 09 October 2018 |
| [94] | US | Method and apparatus for providing deficit-adjusted adaptive assistance during movement phases of an impaired joint | PExo_p | Rigid portable | 20 November 2014 | 17 April 2018 |
| [95] | CN | Walking aid | PExo_t | Rigid portable | 29 November 2013 | 11 September 2020 |
| [96] | CN | A kind of quasi-passive knee ankle-joint coupling lower-limb exoskeleton and its control method | PExo_p | Rigid portable | 31 March 2017 | 18 June 2019 |
| [97] | CA | Method and apparatus for providing economical, portable deficit-adjusted adaptive assistance during movement phases of an impaired ankle | PExo_p | Rigid portable | 20 June 2016 | 24 March 2020 |
| [98] | EP | Ball screw and tensile member exoskeleton joint actuation device | PExo_t | Rigid portable | 04 May 2017 | 16 February 2022 |
| [99] | KR | Robot for assisting user to walk | PExo_t | Rigid portable with wheels | 12 June 2017 | 12 June 2019 |
| [100] | CN | Reconfigurable ectoskeleton | PExo_t | Rigid portable | 11 December 2013 | 29 September 2017 |
| [101] | US | Gait rehabilitation methods and apparatuses | PExo_t | Rigid non-portable | 04 February 2005 | 18 November 2014 |
| [102] | US | Methods of operating an exoskeleton for gait assistance and rehabilitation | PExo_t | Rigid portable | 30 July 2012 | 17 January 2017 |
| [103] | US | Powered orthosis | PExo_t | Rigid non-portable | 04 April 2008 | 03 April 2012 |
| [104] | KR | A treatment device for hemiplegia | PExo_t | Rigid portable | 25 July 2013 | 10 April 2015 |
| [105] | US | Wearable robotic device | PExo_t | Rigid portable | 21 March 2019 | 12 October 2021 |
| [106] | EP | An exoskeleton and method for controlling a swing leg of the exoskeleton | PExo_t | Rigid portable | 23 July 2009 | 04 September 2019 |
| [107] | KR | Wearing tool for measuring biological signal, and wearing-type motion assisting device | PExo_t | Suit | 10 September 2009 | 24 January 2013 |
| [108] | JP | Wheelchair walking assist robot | PExo_t | Rigid portable with wheels | 09 October 2009 | 29 January 2014 |
| [109] | CN | Reduction exoskeleton joint and exoskeleton power assisting device thereof | PExo_t | Rigid portable | 03 May 2016 | 14 April 2020 |
| [110] | US | Cable driven joint actuator and method | PExo_t | Rigid portable | 15 January 2015 | 21 March 2017 |
| [111] | US | Orthopedic device including protruding members | PExo_p | Rigid portable | 10 April 2015 | 15 December 2020 |
| [112] | CN | A kind of passive exoskeleton device of hip joint based on energy timesharing regulation | PExo_t | Rigid portable | 05 December 2017 | 22 November 2019 |
| [113] | US | Methods of enhancing the rehabilitation or training of an exoskeleton wearer | PExo_t | Rigid portable | 11 November 2015 | 03 March 2020 |
| [114] | KR | Robot for assisting user to walk | PExo_t | Rigid portable with wheels | 10 May 2017 | 20 May 2019 |
| [115] | EP | Leg support device | PExo_t | Rigid portable | 21 June 2010 | 18 February 2015 |
| [116] | US | Systems and methods for assistive exosuit system | PExo_t | Suit | 23 August 2017 | 23 February 2021 |
| [117] | ES | Device and method for reducing a person’s oxygen consumption during a regular walk by using a load-bearing exoskeleton | PExo_t | Suit | 19 May 2009 | 22 October 2015 |
| [118] | CN | Device and method for decreasing energy consumption of a person by use of a lower extremity exoskeleton | PExo_t | Rigid portable | 19 May 2009 | 18 March 2015 |
| [119] | JP | Walking robot system that regenerates energy | PExo_t | Rigid portable | 27 March 2018 | 01 September 2021 |
| [120] | CN | It is single to drive bionical gait rehabilitation training robot system | PExo_t | Rigid portable | 06 October 2016 | 30 November 2018 |
| [121] | US | Control logic for biomimetic joint actuators | PExo_t | Rigid non-portable | 28 August 2009 | 20 May 2014 |
| [122] | KR | Legged robotic device utilizing modifiable linkage mechanism | PExo_t | Rigid portable | 06 May 2015 | 13 September 2017 |
| [123] | CN | Lower-limb exoskeleton robot system based on man–machine terminal interaction | PExo_t | Rigid portable | 23 October 2018 | 13 October 2020 |
| [124] | US | Systems for neural bridging of the nervous system | PExo_t | Rigid non-portable | 02 June 2016 | 08 December 2020 |
| [125] | CN | Use the lower-limb exoskeleton robot control method of air bag sensor | PExo_t | Rigid portable | 23 February 2016 | 06 April 2018 |
| [126] | CA | Control system and device for patient assist | PExo_t | Rigid non-portable | 28 March 2013 | 09 October 2018 |
| [127] | ES | Semi-motorized exoskeleton of the lower extremities | PExo_t | Rigid portable | 13 April 2006 | 05 September 2014 |
| [128] | CN | Contact displacement actuator system | PExo_t | Rigid non-portable | 17 July 2007 | 28 January 2015 |
| [129] | EP | System for controlling a robotic device during walking, in particular for rehabilitation purposes, and corresponding robotic device | PExo_t | Rigid portable | 09 March 2011 | 22 October 2014 |
| [130] | KR | Robot for assisting user to walk | PExo_t | Rigid portable with wheels | 10 May 2017 | 03 December 2021 |
| [131] | CN | Lower-limb rehabilitation walking-aid robot supporting omnidirectional movement and control method | PExo_t | Rigid portable with wheels | 04 March 2016 | 24 March 2020 |
| [132] | US | Apparatus and method for reduced-gravity simulation | PExo_t | Rigid non-portable | 18 June 2009 | 10 April 2012 |
| [133] | ES | Powered orthopedic system for cooperative above-ground rehabilitation | PExo_t | Rigid portable | 13 March 2014 | 16 December 2021 |
| [134] | CN | Walking stick type autonomous falling protection rehabilitation walking-aid robot | PExo_t | Rigid portable with wheels | 02 August 2017 | 14 July 2020 |
| [135] | CN | The ectoskeleton wheelchair integrated mobile auxiliary robot of telescopic | PExo_t | Rigid portable with wheels | 29 November 2016 | 20 April 2018 |
| [136] | CN | A kind of link joint integrated hydraulic driving ectoskeleton | PExo_t | Rigid portable | 01 March 2016 | 20 November 2018 |
| [137] | CN | Collapsible mobile lower-limb exoskeleton | PExo_t | Rigid portable | 08 January 2016 | 11 July 2017 |
| [138] | CN | Lower-limb rehabilitation robot based on bidirectional neural interface | PExo_t | Rigid non-portable | 26 July 2018 | 30 July 2021 |
| [139] | US | Torque control methods for an exoskeleton device | PExo_p | Rigid portable | 25 May 2017 | 11 February 2020 |
| [140] | KR | Sensor system for a user’s intention following and walk supporting robot | PExo_t | Rigid portable | 29 December 2009 | 06 August 2012 |
| [141] | US | Walking assist robot and control method thereof | PExo_t | Rigid portable | 03 December 2014 | 23 May 2017 |
| [142] | CN | Lower-limb exoskeleton system with actively adjustable leg rod length and control method thereof | PExo_t | Rigid portable | 25 May 2020 | 14 September 2021 |
| [143] | CN | Variable-rigidity lower-limb exoskeleton power-assisted robot | PExo_t | Rigid portable | 20 August 2019 | 17 December 2021 |
| [144] | CN | Wearable lower-limb healing robot based on exoskeleton | PExo_t | Rigid portable | 07 May 2016 | 23 January 2018 |
| [145] | CN | A kind of passive energy storage foot mechanism for lower-limb assistance exoskeleton | PExo_t | Rigid portable | 23 February 2016 | 20 October 2017 |
| [146] | CN | Lower-limb rehabilitation robot movement intention reasoning method | PExo_t | Rigid non-portable | 22 December 2017 | 22 October 2021 |
| [147] | CN | Portable ankle joint rehabilitation robot based on active intention control | PExo_p | Rigid portable | 29 November 2017 | 01 September 2020 |
| [148] | CN | A kind of passive exoskeleton device of hip knee double jointed based on clutch timesharing regulation | PExo_p | Rigid portable | 14 September 2018 | 08 October 2019 |
| [149] | CN | Exoskeleton hybrid control system and method for lower-limb walking aid machine | PExo_t | Rigid portable with wheels | 11 August 2016 | 22 May 2020 |
| [150] | US | Reconfigurable ankle exoskeleton device | PExo_p | Rigid portable | 24 June 2010 | 05 February 2013 |
| [151] | ES | Active orthosis for the neurological rehabilitation of the movement of the lower limbs, a system comprising said orthosis and a process to put said system into operation | PExo_t | Rigid portable | 20 February 2013 | 04 May 2018 |
| [152] | CN | Lower-limb exoskeleton control method and device | PExo_t | Rigid non-portable | 16 October 2019 | 04 January 2022 |
| [153] | CN | A kind of wearable flexible lower-limb exoskeleton based on negative pressure rotary pneumatic artificial-muscle | PExo_t | Rigid portable | 25 April 2018 | 26 July 2019 |
| [154] | CN | A kind of portable waist hunting gear | PExo_t | Rigid portable with wheels | 12 October 2015 | 11 July 2017 |
| [155] | CN | A kind of Unweighting walking rehabilitation training robot | PExo_t | Rigid portable with wheels | 22 April 2016 | 16 October 2018 |
| [156] | CN | A kind of wearable flexible knee joint robotic exoskeleton equipment based on gait | PExo_t | Rigid portable | 01 December 2016 | 09 April 2019 |
| [157] | CN | Semi-automatic bone installations of pulling together | PExo_p | Rigid non-portable | 21 June 2016 | 09 March 2018 |
| [158] | RU | Actuation system for hip joint orthosis | PExo_p | Rigid portable | 08 February 2016 | 04 December 2019 |
| [159] | CN | Lower-limb exoskeleton heterogeneous knee joint based on parallel elastomers | PExo_p | Rigid portable | 23 October 2018 | 15 June 2021 |
| [160] | CN | Flexible body harness | PExo_t | Rigid portable | 25 February 2016 | 10 April 2020 |
| [161] | US | Lower-limb training rehabilitation apparatus | PExo_t | Rigid non-portable | 12 March 2018 | 09 November 2021 |
| [162] | CN | Motion control method suitable for exoskeleton robot | PExo_t | Rigid portable | 31 May 2020 | 25 May 2021 |
| [163] | CN | Anti-falling system based on lower-limb exoskeleton robot | PExo_t | Rigid non-portable | 19 July 2018 | 29 December 2020 |
| [164] | CN | A kind of lower-limb exoskeleton robot | PExo_t | Rigid portable | 17 August 2016 | 05 September 2017 |
| [165] | CN | A kind of unpowered wearable auxiliary walking servomechanism | PExo_t | Rigid portable | 01 December 2016 | 25 December 2018 |
| [166] | CN | A kind of sufficient isomorphism deformation type wheelchair exoskeleton robot of wheel | PExo_t | Rigid portable with wheels | 22 February 2018 | 03 December 2019 |
| [167] | CN | Overload slipping mechanism of lower-limb exoskeleton robot | PExo_t | Rigid portable | 26 April 2019 | 08 October 2021 |
| [168] | CN | The external bone robot of hemiparalysis recovery type | PExo_t | Rigid portable | 15 July 2016 | 12 October 2018 |
| [169] | CN | A kind of exoskeleton robot | PExo_t | Rigid portable | 21 December 2016 | 28 December 2018 |
| [170] | JP | Life activity detection device and life activity detection system | PExo_t | Suit | 24 August 2016 | 19 August 2020 |
| [171] | KR | Walking assistance apparatus and operation method of the same | PExo_t | Rigid portable with wheels | 06 December 2017 | 20 June 2019 |
| [172] | CN | Human lower-limb assisting device | PExo_t | Rigid portable | 30 November 2018 | 18 September 2020 |
| [173] | JP | Control design framework for resistant exoskeleton | PExo_t | Rigid portable | 15 July 2016 | 16 December 2020 |
| [174] | CN | Auxiliary exercise system and lower-limb exoskeleton control method | PExo_t | Rigid portable | 06 June 2019 | 18 May 2021 |
| [175] | CN | A kind of the lower-limb exoskeleton training method and system of the triggering of Mental imagery pattern brain–computer interface | PExo_t | Rigid non-portable | 25 January 2016 | 03 November 2017 |
| [176] | CN | Human motion intention recognition control device and control method | PExo_t | Rigid portable | 23 November 2018 | 25 December 2020 |
| [177] | KR | Ankle module for gait rehabilitation robot | PExo_p | Rigid portable | 04 November 2016 | 28 December 2018 |
| [178] | KR | Soft Exosuit for Fall Prevention and Gait Assistance | PExo_t | Suit | 29 November 2018 | 30 September 2019 |
| [179] | CN | The ectoskeleton walk help system driven with functional muscle electric stimulation | PExo_t | Rigid portable | 19 September 2016 | 08 January 2019 |
| [180] | US | Integrated platform to monitor and analyze individual progress in physical and cognitive tasks | PExo_t | Rigid portable | 18 July 2016 | 14 January 2020 |
| [181] | CN | Human motion trend detection device and detection method based on force sensor | PExo_t | Rigid non-portable | 25 March 2016 | 28 July 2020 |
| [182] | CN | Exoskeleton robot leg exercise system | PExo_t | Rigid portable | 31 August 2016 | 07 September 2018 |
| [183] | CN | Online step generation control system for exoskeleton robot contralateral training | PExo_t | Rigid non-portable | 09 December 2020 | 16 April 2021 |
| [184] | CN | A kind of detachable recovery set for lower limbs and control method | PExo_t | Rigid portable with wheels | 02 December 2016 | 30 April 2019 |
| [185] | EP | Adaptive assistive and/or rehabilitative device and system | PExo_t | Rigid portable with wheels | 12 February 2019 | 08 September 2021 |
| [186] | US | Wearable assistive device that efficiently delivers assistive force | PExo_t | Rigid portable | 22 February 2019 | 06 October 2020 |
| [187] | JP | Leg straightening device and straightening device | PExo_t | Rigid portable | 24 June 2015 | 14 February 2020 |
| [188] | CN | The lower-limb rehabilitation ectoskeleton control system and method that subject dominates | PExo_t | Rigid portable | 11 August 2016 | 24 May 2019 |
| [189] | TW | Walking rehabilitation robot system | PExo_t | Rigid portable | 07 September 2018 | 01 September 2020 |
| [190] | KR | Ankle assist apparatus | PExo_p | Rigid portable | 17 November 2017 | 05 September 2019 |
| [191] | CN | A kind of single rope towards gait and balance rehabilitation training suspends active loss of weight system in midair | PExo_t | Rigid non-portable | 18 September 2016 | 10 July 2018 |
| [192] | CN | Convalescence device walking trigger control method based on trunk center of gravity shift | PExo_t | Rigid portable | 25 November 2015 | 13 April 2018 |
| [193] | CN | Brain-myoelectricity fusion small-world neural network prediction method for human lower-limb movement | PExo_t | Soft non-portable | 15 July 2020 | 07 September 2021 |
| [194] | JP | Assisted rehabilitation training robot | PExo_t | Rigid non-portable | 28 February 2017 | 07 August 2019 |
| [195] | KR | Wearable soft exoskeleton apparatus | PExo_t | Rigid portable | 25 July 2016 | 04 January 2018 |
| [196] | CN | Walking aid for hemiplegia patients | PExo_t | Rigid portable | 06 June 2018 | 30 June 2020 |
| [197] | ES | Drive device for motorized orthosis | PExo_t | Rigid portable | 12 April 2018 | 30 September 2021 |
| [198] | KR | Wearable robot and control method for the same | PExo_t | Rigid portable | 31October 2013 | 20 August 2020 |
| [199] | US | System and device for guiding and detecting motions of 3-DOF rotational target joint | PExo_p | Rigid portable | 16 January 2017 | 05 October 2021 |
| [200] | CN | Ankle treatment and exoskeleton measurement device not making contact with ground, capable of being worn and capable of being reconstructed | PExo_p | Rigid portable | 15 April 2013 | 25 June 2014 |
| [201] | CN | A kind of unpowered walking power-assisted flexible exoskeleton device | PExo_t | Rigid portable | 27 December 2017 | 20 September 2019 |
| [202] | CN | Lower-limb exoskeleton driver | PExo_t | Rigid portable | 29 August 2019 | 29 September 2020 |
| [203] | EP | Walking training apparatus and state determination method | PExo_t | Rigid non-portable | 15 March 2017 | 30 September 2020 |
| [204] | KR | Shoe module for detecting walking phase, method, gait analysis system and active walking assist device using the same | PExo_p | Rigid non-portable | 10 November 2014 | 16 August 2016 |
| [205] | KR | Muscle rehabilitation training method using walking-assistive robot | PExo_t | Rigid portable | 28 January 2014 | 01 October 2015 |
| [206] | CN | Method for controlling man-machine interactive motion of lower-limb exoskeleton based on joint stress | PExo_t | Rigid portable | 26 December 2018 | 11 February 2022 |
| [207] | CN | Pelvic auxiliary walking rehabilitation training robot | PExo_p | Rigid non-portable | 21 November 2019 | 09 November 2021 |
| [208] | CN | Auxiliary standing device and auxiliary standing mechanism | PExo_t | Rigid portable with wheels | 19 July 2019 | 28 December 2021 |
| [209] | US | Tendon device for suit type robot for assisting human with physical strength | PExo_t | Suit | 27 October 2017 | 13 October 2020 |
| [210] | CN | Pneumatic waist assistance exoskeleton robot | PExo_p | Rigid portable | 20 April 2018 | 08 September 2020 |
| [211] | CN | Exoskeleton robot line winding driving hip joint | PExo_t | Rigid portable | 31 August 2016 | 14 August 2018 |
| [212] | US | Method and system for control and operation of motorized orthotic exoskeleton joints | PExo_t | Rigid portable | 01 April 2015 | 07 May 2019 |
| [213] | US | System and method for the regeneration of at least one severed nerve conduit | PExo_t | Rigid non-portable | 20 July 2018 | 02 February 2021 |
| [214] | KR | Robot for Assistance Exoskeletal Power | PExo_t | Rigid portable with wheels | 07 March 2012 | 18 February 2014 |
| [215] | CN | Sit and stand and go multi-functional motion auxiliary robot | PExo_t | Rigid portable with wheels | 22 August 2018 | 01 May 2020 |
| [216] | EP | Wearable assistive device performing protection operation for drive system | PExo_t | Rigid portable with wheels | 26 February 2019 | 10 November 2021 |
| [217] | CN | A kind of exoskeleton robot follow-up control device | PExo_t | Rigid portable | 12 June 2015 | 31 May 2017 |
| [218] | US | Walking assistance method and apparatuses | PExo_p | Rigid portable | 04 January 2018 | 07 September 2021 |
| [219] | US | Methods of exoskeleton communication and control | PExo_t | Rigid portable | 14 April 2016 | 30 June 2020 |
| [220] | EP | Foot for a robotic exoskeleton for assisted walking of persons suffering from locomotor disorders | PExo_p | Rigid portable | 14 July 2016 | 17 July 2019 |
| [221] | CN | External structure holder device | PExo_t | Rigid portable | 08 July 2014 | 09 January 2018 |
| [222] | US | Magneto-rheological series elastic actuator | PExo_t | Rigid portable | 30 March 2018 | 21 April 2020 |
| [223] | KR | A knee-orthosis to assist the gait by support the knee-joint | PExo_p | Rigid portable | 01 February 2012 | 15 November 2013 |
| [224] | CN | A kind of plantar pressure measuring device and method for ectoskeleton control | PExo_p | Rigid portable | 25 April 2016 | 12 October 2018 |
| [225] | US | Exoskeleton device | PExo_t | Rigid portable | 10 May 2019 | 15 June 2021 |
| [226] | US | Exoskeleton device | PExo_t | Rigid portable | 10 May 2019 | 17 August 2021 |
| [227] | CN | Power-source-free knee joint mechanism | PExo_p | Rigid portable | 12 June 2020 | 29 September 2020 |
| [228] | CN | A kind of ectoskeleton walk help system driven with functional muscle electric stimulation | PExo_t | Rigid portable | 19 September 2016 | 05 April 2019 |
| [229] | KR | Robot for lower limb with multi-link type knee joint and method for controlling the same | PExo_t | Rigid portable | 25 March 2016 | 13 February 2018 |
| [230] | CN | A kind of hip joint structure of wearable exoskeleton robot | PExo_p | Rigid portable | 23 May 2016 | 21 September 2018 |
| [231] | CN | Variable-rigidity lower-limb exoskeleton robot based on shape–memory alloy | PExo_t | Rigid portable | 03 August 2020 | 04 January 2022 |
| [232] | CN | Lower-limb exoskeleton inverse motion analysis method under random road surface condition | PExo_t | Rigid portable | 11 November 2016 | 19 May 2020 |
| [233] | CN | A kind of light-duty ankle-joint ectoskeleton | PExo_p | Rigid portable | 06 January 2017 | 05 February 2019 |
| [234] | CN | Wearable metatarsophalangeal joint walking power assisting device | PExo_p | Rigid portable | 22 June 2020 | 27 August 2021 |
| [235] | CN | Flexible exoskeleton robot assisting movement of hip joint and knee joint | PExo_p | Rigid portable | 14 June 2018 | 26 June 2020 |
| [236] | KR | Walking Pattern Training and Intension Analysis System Through Complex Stimulus, and Method thereof | PExo_t | Rigid portable | 27 June 2017 | 28 December 2018 |
| [237] | US | Belt for effective wearing and wearable assistive device having the same | PExo_t | Rigid portable | 14 March 2019 | 31 March 2020 |
| [238] | RU | Femal link of an active foot orthosis | PExo_t | Rigid portable | 11 July 2016 | 25 May 2017 |
| [239] | KR | Gait rehabilitation apparatus | PExo_t | Rigid non-portable | 30 May 2018 | 06 July 2020 |
| [240] | CN | The walking trigger control method of convalescence device based on foot pressure sensor | PExo_t | Rigid non-portable | 25 November 2015 | 15 May 2018 |
| [241] | KR | Walking assistance apparatus and operation method of the same | PExo_t | Rigid portable with wheels | 06 December 2017 | 28 August 2019 |
| [242] | JP | Joint motion assist device | PExo_p | Rigid portable | 10 January 2014 | 29 March 2017 |
| [243] | EP | Walking training apparatus and method of controlling the same | PExo_t | Rigid non-portable | 15 December 2017 | 23 September 2020 |
| [244] | CN | Control method of lower-limb exoskeleton robot | PExo_t | Rigid portable | 28 November 2018 | 22 December 2020 |
| [245] | CN | Sole human–computer interaction measuring device based on multi-source information fusion | PExo_p | Rigid portable | 23 October 2018 | 06 July 2021 |
| [246] | CN | Handrail type intelligent tumble protection walking aid rehabilitation robot | PExo_t | Rigid portable with wheels | 24 July 2018 | 04 August 2020 |
| [247] | CN | Support member and the self-adapting seat device with the support member | PExo_t | Rigid portable | 29 September 2015 | 31 October 2017 |
| [248] | CN | Lower-limb power assisting device | PExo_t | Rigid portable | 13 May 2019 | 08 February 2022 |
| [249] | KR | Walking assistance apparatus and operation method of the same | PExo_t | Rigid portable with wheels | 06 December 2017 | 28 August 2019 |
| [250] | CN | A kind of convalescence device speed of travel control method rocked based on trunk | PExo_t | Rigid portable | 13 November 2015 | 05 January 2018 |
| [251] | CN | A kind of adaptive ectoskeleton knee joint support plate unlocked | PExo_t | Rigid portable | 17 August 2016 | 15 June 2018 |
| [252] | CN | Standing mode control method of exoskeleton mechanical leg rehabilitation system | PExo_t | Rigid portable | 24 February 2017 | 22 September 2020 |
| [253] | CN | Electromyographic signal collection position choosing method based on complex network | PExo_t | Suit | 23 March 2016 | 29 May 2018 |
| [254] | CN | The bionical dynamic knee joint system in the wearable list source of one kind and its control method | PExo_p | Rigid portable | 29 December 2017 | 30 August 2019 |
| [255] | EP | Exoskeleton and mounting arrangement | PExo_t | Rigid portable | 18 December 2018 | 25 November 2020 |
| [256] | US | Active arm passive leg exercise machine with guided leg movement | PExo_t | Rigid non-portable | 02 April 2019 | 10 August 2021 |
| [257] | CA | Self-supported device for guiding motions of a target joint | PExo_t | Rigid non-portable | 13 May 2019 | 08 June 2021 |
| [258] | CN | A kind of wearable leg power brace of self-regulation | PExo_t | Rigid portable | 18 July 2016 | 12 February 2019 |
| [259] | CN | A wheeled drive self-balancing power ectoskeleton of sole for spinal cord injury patient | PExo_t | Rigid portable | 12 April 2017 | 20 March 2020 |
| [260] | EP | Controlling position of wearable assistive device depending on operation mode | PExo_t | Rigid portable with wheels | 26 February 2019 | 17 November 2021 |
| [261] | RU | Modular orthopedic apparatus | PExo_p | Rigid portable | 04 September 2017 | 28 June 2018 |
| [262] | US | Methods and systems for an exoskeleton to reduce a runners metabolic rate | PExo_p | Rigid portable | 15 April 2019 | 04 February 2020 |
| [263] | CN | Telescopic structure and exoskeleton robot with same | PExo_t | Rigid portable | 14 November 2018 | 02 February 2021 |
| [264] | EP | Advanced gait control system and methods enabling continuous walking motion of a powered exoskeleton device | PExo_t | Rigid portable | 23 April 2018 | 05 January 2022 |
| [265] | US | Exoskeleton system | PExo_t | Rigid portable | 30 April 2019 | 07 December 2021 |
| [266] | KR | Reaction force adjusting device of exoskeleton system and variable stiffness actuator using the same | PExo_t | Rigid portable | 30 March 2018 | 16 January 2020 |
| [267] | US | Safety monitoring and control system and methods for a legged mobility exoskeleton device | PExo_t | Rigid portable | 18 November 2016 | 03 August 2021 |
| [268] | KR | Elastic type sole assembly in wearable robot absorbing impact and detecting ground reaction force | PExo_p | Rigid portable | 16 September 2014 | 10 May 2016 |
| [269] | JP | Foot mounting structure of joint motion assist device | PExo_p | Rigid portable | 09 August 2013 | 08 June 2016 |
| [270] | US | Adaptable robotic gait trainer | PExo_t | Rigid non-portable | 20 April 2018 | 05 October 2021 |
| [271] | KR | Reaction force adjusting device and method using variable stiffness actuator of exoskeleton system | PExo_t | Rigid portable | 30 March 2018 | 16 January 2020 |
| [272] | US | Exosuit systems and methods | PExo_t | Suit | 28 November 2018 | 07 December 2021 |
| [273] | CN | A kind of ectoskeleton stopping means | PExo_t | Rigid portable | 19 May 2016 | 30 January 2018 |
| [274] | ES | System to assist walking | PExo_t | Rigid portable | 17 October 2016 | 11 September 2018 |
| [275] | CN | Electro–hydraulic hybrid driving exoskeleton device | PExo_t | Rigid portable | 25 May 2018 | 07 April 2020 |
| [276] | CN | Pneumatic weight-reducing walking power-assisted robot | PExo_t | Rigid portable | 30 August 2018 | 16 June 2020 |
| [277] | DE | Mobility system | PExo_t | Rigid non-portable | 17 August 2016 | 05 October 2017 |
| [278] | KR | Gait assist robot for rehabilitation training with lift device | PExo_t | Rigid portable with wheels | 24 October 2019 | 03 December 2021 |
| [279] | KR | Robot device for upper and lower extremity rehabilitation | PExo_t | Rigid non-portable | 21 April 2020 | 30 September 2021 |
| [280] | CN | Device and method for realizing cooperative motion of weight-reducing vehicle and lower-limb robot through communication | PExo_t | Rigid portable with wheels | 18 November 2019 | 21 September 2021 |
| [281] | CN | Counter weight type lower-limb rehabilitation robot | PExo_t | Rigid non-portable | 21 October 2019 | 16 November 2021 |
| [282] | CN | Lower-limb exoskeleton robot with overload slipping function | PExo_p | Rigid portable | 26 April 2019 | 08 October 2021 |
| [283] | CN | Device and method for assisting lower-limb robot to transfer gravity center by aid of weight reduction vehicle | PExo_t | Rigid portable with wheels | 02 December 2019 | 19 November 2021 |
| [284] | CN | Anti-falling walking aid vehicle for lower-limb rehabilitation training and rehabilitation training method | PExo_t | Rigid non-portable | 12 July 2019 | 21 July 2020 |
| [285] | KR | Patient weight burden reduction device of walking rehabilitation training robot | PExo_t | Rigid portable with wheels | 24 October 2019 | 26 October 2021 |
| [286] | CN | Exoskeleton joint self-locking mechanism, knee joint and bionic rehabilitation robot | PExo_p | Rigid portable | 29 September 2020 | 05 February 2021 |
| [287] | CN | Lower-limb exoskeleton ankle joint based on telecentric mechanism | PExo_p | Rigid portable | 23 October 2018 | 02 March 2021 |
| [288] | KR | Lower extremity exoskeleton robotic device | PExo_t | Rigid portable | 20 May 2021 | 24 August 2021 |
| [289] | CN | Lower-limb exoskeleton capable of being used for both wheel and leg | PExo_t | Rigid portable with wheels | 01 July 2019 | 11 May 2021 |
| [290] | CN | Auxiliary dual-purpose outer limb robot for human body movement | PExo_t | Rigid portable | 08 July 2019 | 08 September 2020 |
| [291] | KR | Rehabilitation walking method considering patient’s rom characteristics and system thereof | PExo_t | Rigid portable | 27 December 2017 | 09 September 2019 |
| [292] | JP | Lower limbs of the exoskeleton with low power consumption | PExo_t | Rigid portable | 19 September 2018 | 17 March 2021 |
| [293] | CN | Novel self-balancing ectoskeleton robot | PExo_t | Rigid portable | 23 April 2021 | 01 February 2022 |
| [294] | KR | Rehabilitation robot | PExo_t | Rigid non-portable | 24 July 2018 | 26 February 2020 |
| [295] | KR | Leg opening joint of walking exoskeleton and walking exoskeleton comprising the same | PExo_t | Rigid portable | 19 November 2018 | 15 November 2019 |
| [296] | CN | Motion decoupling parallel driving type exoskeleton robot ankle joint | PExo_p | Rigid portable | 23 April 2021 | 25 January 2022 |
| [297] | CN | Locking-free hip adjusting device | PExo_p | Rigid portable | 23 December 2020 | 09 April 2021 |
| [298] | CN | Constant-force human body suspension system for rehabilitation training | PExo_t | Rigid non-portable | 06 August 2019 | 29 September 2020 |
| [299] | CN | Control method of hydraulic system of knee joint rehabilitation robot | PExo_p | Rigid portable | 24 August 2017 | 21 July 2020 |
| [300] | CN | Walking-aid boots | PExo_p | Rigid portable | 20 September 2017 | 07 April 2020 |
| [301] | KR | Walking assistance system | PExo_t | Rigid non-portable | 18 February 2020 | 17 January 2022 |
| [302] | KR | Wearable suit control method | PExo_t | Suit | 15 November 2019 | 10 August 2021 |
| [303] | CN | Power-assisted exoskeleton control method, power-assisted exoskeleton control system and computer equipment | PExo_t | Rigid portable | 15 November 2019 | 29 October 2021 |
| [304] | CN | Variable-rigidity knee joint exoskeleton robot based on shape–memory alloy | PExo_p | Rigid portable | 03 August 2020 | 14 January 2022 |
| [305] | KR | Motion assist apparatus | PExo_p | Rigid portable | 25 July 2018 | 16 September 2020 |
| [306] | RU | Exoskeleton | PExo_t | Rigid portable | 15 April 2021 | 26 November 2021 |
| [307] | KR | Two-leg walking assistant system for boarding type | PExo_t | Rigid portable | 02 December 2013 | 03 March 2015 |
| [308] | US | Soft inflatable exosuit for knee rehabilitation | PExo_t | Suit | 31 July 2018 | 01 March 2022 |
| [309] | KR | Walk assistance and fall prevention wearable suit | PExo_t | Suit | 15 November 2019 | 07 March 2022 |
| [310] | KR | Size-adjustable pelvis unit and wearable walking robot comprising the same | PExo_p | Rigid portable | 16 March 2016 | 09 August 2017 |
| [311] | CN | A kind of human foot’s bionic exoskeleton system | PExo_t | Rigid portable | 22 September 2016 | 28 August 2018 |
| [312] | KR | Apparatus and method for observing feedback force of wearable exoskeleton system | PExo_t | Rigid portable | 13 February 2018 | 01 October 2019 |
| [313] | JP | Measurement system, measurement method, and program | PExo_t | Rigid portable | 18 May 2017 | 02 June 2021 |
| [314] | KR | Devices designed to be positioned near joints and systems incorporating such devices | PExo_p | Rigid portable | 28 October 2019 | 09 December 2021 |
| Cite | Country Code | Title | Type of Treatment | Type of Structure | Application Date | Publication Date |
|---|---|---|---|---|---|---|
| [315] | US | Lower extremity exoskeleton for gait retraining | PExo_t | Rigid portable | 26 October 2015 | 02 June 2016 |
| [27] | US | Lower extremity exoskeleton for gait retraining | PExo_t | Rigid portable | 28 September 2012 | 29 August 2013 |
| [316] | WO | Lower extremity exoskeleton for gait retraining | PExo_t | Rigid portable | 28 September 2012 | 04 April 2013 |
| [317] | US | Pneumatic lower extremity gait rehabilitation training system | PExo_t | Rigid non-portable | 12 September 2016 | 15 March 2018 |
| [318] | WO | Powered orthotic system for cooperative overground rehabilitation | PExo_t | Rigid portable | 13 March 2014 | 02 October 2014 |
| [319] | IN | Robotic exoskeleton assisted (locomotion) rehabilitation system “rears” | PExo_t | Rigid portable with wheels | 14 December 2017 | 01 February 2019 |
| [320] | WO | Active sling for the motion neurological rehabilitation of lower limbs, system comprising such sling and process for operating such system | PExo_t | Rigid portable | 20 February 2013 | 19 September 2013 |
| [321] | EP | Active orthosis for the motion neurological rehabilitation of lower limbs, system comprising such orthosis and process for operating such system | PExo_t | Rigid portable | 20 February 2013 | 21 January 2015 |
| [322] | WO | Interface for adjusting the motion of a powered orthotic device through externally applied forces | PExo_t | Rigid portable | 15 January 2014 | 24 July 2014 |
| [323] | EP | Interface for adjusting the motion of a powered orthotic device through externally applied forces | PExo_t | Rigid portable | 15 January 2014 | 25 November 2015 |
| [324] | EP | Powered orthotic system for cooperative overground rehabilitation | PExo_t | Rigid portable | 13 March 2014 | 20 January 2016 |
| [325] | EP | Assistive flexible suits, flexible suit systems, and methods for making and control thereof to assist human mobility | PExo_t | Suit | 03 December 2014 | 19 October 2016 |
| [326] | WO | Interactive exoskeleton robotic knee system | PExo_p | Rigid portable | 01 March 2016 | 17 November 2016 |
| [327] | US | Admittance shaping controller for exoskeleton assistance of the lower extremities | PExo_p | Rigid portable | 05 December 2017 | 12 April 2018 |
| [328] | US | Assistive flexible suits, flexible suit systems, and methods for making and control thereof to assist human mobility | PExo_t | Suit | 03 December 2014 | 20 July 2017 |
| [329] | WO | Bio-inspired adaptive impedance-based controller for human–robot interaction and method | PExo_t | Rigid non-portable | 26 August 2019 | 27 February 2020 |
| [330] | US | Apparatus and system for limb rehabilitation | PExo_t | Rigid portable with wheels | 29 November 2018 | 20 June 2019 |
| [28] | US | Lower extremity robotic rehabilitation system | PExo_t | Rigid non-portable | 05 October 2012 | 10 April 2014 |
| [331] | US | Admittance shaping controller for exoskeleton assistance of the lower extremities | PExo_p | Rigid portable | 25 June 2015 | 18 February 2016 |
| [332] | US | Modular and minimally constraining lower-limb exoskeleton for enhanced mobility and balance augmentation | PExo_t | Rigid portable | 04 October 2017 | 22 August 2019 |
| [333] | WO | Modular and minimally constraining lower-limb exoskeleton for enhanced mobility and balance augmentation | PExo_t | Rigid portable | 04 October 2017 | 12 April 2018 |
| [334] | EP | Soft exosuit for assistance with human motion | PExo_t | Suit | 30 May 2014 | 13 April 2016 |
| [335] | EP | Soft exosuit for assistance with human motion | PExo_t | Suit | 30 May 2014 | 17 February 2021 |
| [336] | US | Methods of enhancing the or training rehabilitation of an exoskeleton wearer | PExo_t | Rigid portable | 11 November 2015 | 22 March 2018 |
| [337] | WO | Apparatus and system for limb rehabilitation | PExo_t | Rigid portable with wheels | 29 November 2018 | 20 June 2019 |
| [338] | US | Bio-inspired standing balance controller for a full-mobilization exoskeleton | PExo_p | Rigid portable | 16 July 2020 | 21 January 2021 |
| [339] | WO | Methods for improved user mobility and treatment | PExo_t | Rigid portable | 27 May 2021 | 02 December 2021 |
| [340] | WO | Exoskeleton ankle robot | PExo_p | Rigid portable | 01 March 2016 | 17 November 2016 |
| [341] | US | Powered medical device and methods for improved user mobility and treatment | PExo_t | Rigid portable | 27 May 2021 | 02 December 2021 |
| [342] | WO | Methods of enhancing the rehabilitation or training of an exoskeleton wearer | PExo_t | Rigid portable | 11 November 2015 | 19 May 2016 |
| [343] | EP | Soft wearable muscle assisting device | PExo_t | Suit | 21 December 2017 | 02 September 2020 |
| [344] | EP | Exoskeleton | PExo_t | Rigid portable | 11 November 2015 | 20 September 2017 |
| [345] | WO | Soft wearable muscle assisting device | PExo_p | Suit | 21 December 2017 | 05 July 2018 |
| [346] | US | Human movement research, therapeutic, and diagnostic devices, methods, and systems | PExo_t | Rigid non-portable | 21 April 2015 | 02 February 2017 |
| [347] | US | Robotic management system for limb rehabilitation | PExo_t | Rigid portable with wheels | 30 October 2019 | 04 June 2020 |
| [348] | US | Interface for adjusting the motion of a powered orthotic device through externally applied forces | PExo_t | Rigid portable | 15 January 2014 | 10 December 2015 |
| [349] | US | Control system for movement reconstruction and/or restoration for a patient | PExo_t | Rigid non-portable | 13 November 2019 | 14 May 2020 |
| [350] | US | Data logging and third-party administration of a mobile robot | PExo_t | Rigid portable | 27 May 2021 | 02 December 2021 |
| [351] | US | Apparatus comprising a support system for a user and its operation in a gravity assist mode | PExo_t | Rigid non-portable | 17 August 2017 | 16 September 2021 |
| [352] | US | Integrated platform to monitor and analyze individual progress in physical and cognitive tasks | PExo_t | Rigid portable | 18 July 2016 | 14 January 2020 |
| [353] | EP | Soft exosuit for assistance with human motion | PExo_t | Suit | 17 September 2013 | 22 July 2015 |
| [354] | EP | Movement assistance device | PExo_t | Rigid portable | 17 June 2013 | 22 April 2015 |
| [355] | WO | Movement assistance device | PExo_t | Rigid portable | 17 June 2013 | 19 December 2013 |
| [356] | US | Exoskeleton and master | PExo_t | Rigid portable | 27 June 2017 | 01 August 2019 |
| [357] | US | Powered orthotic system for cooperative overground rehabilitation | PExo_t | Rigid portable | 13 March 2014 | 04 February 2016 |
| [358] | EP | Exoskeleton for assisting human movement | PExo_t | Rigid portable | 25 November 2015 | 04October 2017 |
| [359] | WO | Data logging and third-party administration of a mobile robot | PExo_t | Rigid portable | 27.05.2021 | 02 December 2021 |
| [360] | US | Reconfigurable exoskeleton | PExo_t | Rigid portable | 11 December 2013 | 10 December 2015 |
| [32] | US | Powered gait assistance systems | PExo_t | Rigid portable | 31 July 2017 | 30 September 2021 |
| [361] | CA | Apparatus and method for restoring voluntary control of locomotion in neuromotor impairments | PExo_t | Rigid non-portable | - | 05 December 2013 |
| [362] | AU | Apparatus and method for restoring voluntary control of locomotion in neuromotor impairments | PExo_t | Rigid non-portable | 29 May 2013 | 11 December 2014 |
| [363] | WO | Apparatus and method for restoring voluntary control of locomotion in neuromotor impairments | PExo_t | Rigid non-portable | 29 May 2013 | 05 December 2013 |
| [364] | EP | Apparatus for restoring voluntary control of locomotion in neuromotor impairments | PExo_t | Rigid non-portable | 29 May 2013 | 08 April 2015 |
| [365] | EP | Reconfigurable exoskeleton | PExo_t | Rigid portable | 11 December 2013 | 21 October 2015 |
| [366] | WO | Methods of communication exoskeleton and control | PExo_t | Rigid portable | 14 April 2016 | 20 October 2016 |
| [367] | EP | Soft exosuit for assistance with human motion | PExo_t | Suit | 17 September 2013 | 17 March 2021 |
| [368] | US | Soft exosuit for assistance with human motion | PExo_t | Suit | 17 September 2013 | 25 June 2015 |
| [369] | EP | Apparatus for restoring voluntary control of locomotion in neuromotor impairments | PExo_t | Rigid non-portable | 29 May 2013 | 08 November 2017 |
| [370] | US | Soft exosuit for assistance with human motion | PExo_t | Suit | 17 March 2015 | 12 November 2015 |
| [371] | US | Power-assist with adjustable lower-limb exoskeleton robot stiffness joints | PExo_t | Rigid portable | 10 January 2019 | 29 October 2020 |
| [372] | WO | Mobility assistance devices with automated assessment and adjustment control | PExo_t | Rigid portable | 07 February 2018 | 27 September 2018 |
| [373] | US | Soft exosuit for assistance with human motion | PExo_t | Suit | 13 April 2016 | 04 August 2016 |
| [374] | US | Exoskeleton ankle robot | PExo_p | Rigid portable | 21 June 2015 | 17 November 2016 |
| [375] | US | Mobility assistance devices with automated assessment and adjustment control | PExo_t | Rigid portable | 07 February 2018 | 27 February 2020 |
| [376] | EP | Method and apparatus for providing economical, portable deficit-adjusted adaptive assistance during movement phases of an impaired ankle | PExo_p | Rigid portable | 20 June 2016 | 15 September 2021 |
| [377] | WO | Method and apparatus for providing economical, portable deficit-adjusted adaptive assistance during movement phases of an impaired ankle | PExo_t | Rigid portable | 20 June 2016 | 29 December 2016 |
| [378] | WO | Customizable orthotic/prosthetic braces and lightweight modular exoskeleton | PExo_p | Rigid portable | 14 June 2017 | 21 December 2017 |
| [31] | US | Soft exosuit for assistance with human motion | PExo_t | Suit | 13 August 2020 | 11 February 2021 |
| [379] | WO | Powered gait assistance systems | PExo_t | Rigid portable | 31 July 2017 | 01 February 2018 |
| [380] | US | Customizable orthotic/prosthetic braces and lightweight modular exoskeleton | PExo_p | Rigid portable | 14 June 2017 | 31 October 2019 |
| [381] | IN | Method and apparatus for providing economical portable deficit adjusted adaptive assistance during movement phases of an impaired ankle | PExo_p | Rigid portable | 13 December 2017 | 16 March 2018 |
| [382] | US | Hybrid terrain- adaptive lower-extremity systems | PExo_p | Rigid portable | 31 December 2018 | 11 July 2019 |
| [383] | US | Robotic system for simulating a wearable device and method of use | PExo_t | Rigid non-portable | 20 December 2012 | 20 June 2013 |
| [384] | US | Kinetic sensing, signal generation, feature extraction, and pattern recognition for control of autonomous wearable leg devices | PExo_p | Rigid portable | 08 November 2017 | 10 October 2019 |
| [385] | US | Open-loop control for exoskeleton motor | PExo_t | Rigid portable | 19 March 2021 | 23 September 2021 |
| [386] | WO | Kinoped lower extremity performance improvement, injury prevention, and rehabilitation system | PExo_t | Rigid non-portable | 04 September 2020 | 11 March 2021 |
| [387] | EP | System for assisting walking | PExo_p | Rigid portable | 18 November 2016 | 26 September 2018 |
| [388] | CA | Methods of communication exoskeleton and control | PExo_t | Rigid portable | 14 April 2016 | 20 October 2016 |
| [389] | US | Movement assistance device | PExo_t | Rigid portable | 17 June 2013 | 21 May 2015 |
| [390] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_p | Rigid portable | 24 September 2013 | 20 March 2014 |
| [391] | US | Interactive exoskeleton robotic knee system | PExo_p | Rigid portable | 21 June 2015 | 17 November 2016 |
| [392] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_p | Rigid portable | 11 April 2016 | 13 October 2016 |
| [393] | US | Implementing a stand-up sequence using a lower-extremity prosthesis or orthosis | PExo_t | Rigid portable | 23 September 2013 | 20 March 2014 |
| [394] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_t | Rigid portable | 30 July 2018 | 25 April 2019 |
| [395] | WO | Apparatus comprising a support system for a user and its operation in a gravity assist mode | PExo_t | Rigid non-portable | 17 August 2017 | 22 February 2018 |
| [396] | US | Orthopedic device including protruding members | PExo_p | Rigid portable | 10 April 2015 | 02 February 2017 |
| [29] | US | Exoskeleton device and control system | PExo_p | Rigid portable | 25 May 2017 | 10 May 2018 |
| [397] | US | Cloud-based control system and method enabling interactive clinical care using a powered mobility assistance device | PExo_t | Rigid portable | 03 September 2019 | 16 December 2021 |
| [398] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_p | Rigid portable | 28 April 2016 | 18 August 2016 |
| [399] | US | Methods of communication exoskeleton and control | PExo_t | Rigid portable | 14 April 2016 | 05 April 2018 |
| [400] | US | Exoskeleton device and control system | PExo_p | Rigid portable | 24 February 2021 | 02 December 2021 |
| [401] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_p | Rigid portable | 30 November 2016 | 30 March 2017 |
| [402] | US | Soft exosuit for assistance with human motion | PExo_t | Suit | 30 May 2014 | 21 April 2016 |
| [403] | US | Systems, methods, and devices for assisting walking for developmentally delayed toddlers | PExo_p | Rigid portable | 05 February 2015 | 01 December 2016 |
| [404] | CA | Method and apparatus for providing economical, portable deficit-adjusted adaptive assistance during movement phases of an impaired ankle | PExo_p | Rigid portable | - | 29 December 2016 |
| [405] | US | Torque control methods for an exoskeleton device | PExo_p | Rigid portable | 25 May 2017 | 30 November 2017 |
| [406] | US | Patient aid devices, particularly for mobile upper extremity support in railed devices such as parallel bars and treadmills | PExo_p | Rigid portable | 23 October 2017 | 15 February 2018 |
| [407] | WO | Autonomous mobile support system for the robotic mobility-impaired | PExo_t | Rigid portable with wheels | 18 August 2020 | 06 May 2021 |
| [408] | US | Wearable robot and control method thereof | PExo_t | Rigid portable | 02 December 2014 | 16 July 2015 |
| [409] | US | Patient aid devices, particularly for mobile upper extremity support in railed devices such as parallel bars and treadmills | PExo_p | Rigid portable | 21 May 2015 | 26 November 2015 |
| [410] | WO | Wearable devices for protecting against musculoskeletal injuries and enhancing performance | PExo_p | Rigid portable | 15 February 2019 | 22 August 2019 |
| [411] | WO | Exosuit systems and methods | PExo_t | Suit | 28 November 2018 | 06 June 2019 |
| [412] | US | Exosuit systems and methods | PExo_t | Suit | 28 November 2018 | 30 May 2019 |
| [413] | US | System and method for the regeneration of at least one severed nerve conduit | PExo_t | Rigid non-portable | 20 July 2018 | 15 November 2018 |
| [414] | US | Exosuit load bearing distribution systems | PExo_t | Suit | 28 November 2018 | 30 May 2019 |
| [415] | US | Orthosis leg and orthosis | PExo_t | Rigid portable | 24 June 2015 | 08 June 2017 |
| [416] | CN | Lower extremity exoskeleton control method and apparatus | PExo_t | Rigid non-portable | 16 October 2019 | 21 February 2020 |
| [417] | EP | Esoskeleton equipped with electro-or magneto- rheological fluid type semi-active joints | PExo_t | Rigid portable | 29 December 2017 | 06 November 2019 |
| [30] | WO | Esoskeleton equipped with electro-or magneto- rheological fluid type semi-active joints | PExo_t | Rigid portable | 29 December 2017 | 05 July 2018 |
| [418] | US | Low profile exoskeleton | PExo_t | Rigid portable | 05 November 2015 | 12 May 2016 |
| [419] | WO | System for movement control | PExo_p | Rigid portable | 15 May 2020 | 26 November 2020 |
| Cite | Country Code | Title | Type of Treatment | Type of Structure | Application Date | Publication Date |
|---|---|---|---|---|---|---|
| [420] | EP | Powered orthotic system for cooperative overground rehabilitation | PExo_t | Rigid portable | 13 March 2014 | 11 August 2021 |
| [421] | US | Movement assistance device | PExo_t | Rigid non-portable | 20 June 2017 | 06 October 2020 |
| [422] | US | Hybrid terrain-adaptive lower-extremity systems | PExo_p | Rigid portable | 30 June 2018 | 03 March 2020 |
| [423] | EP | System for assisting walking | PExo_t | Rigid portable | 18 November 2016 | 04 November 2020 |
| [424] | US | Optimal design of a lower-limb exoskeleton or orthosis | PExo_t | Rigid portable | 16 December 2014 | 18 February 2020 |
| [78] | US | Powered lower-limb devices and methods of control thereof | PExo_t | Rigid portable | 03 November 2017 | 07 December 2021 |
| [425] | US | Leg orthosis and orthosis | PExo_p | Rigid portable | 24 June 2015 | 23 November 2021 |
| [11] | US | Orthopedic device including protruding members | PExo_p | Rigid portable | 10 April 2015 | 15 December 2020 |
| [426] | US | Soft exosuit for assistance with human motion | PExo_t | Suit | 30 May 2014 | 24 November 2020 |
| [427] | US | Portable human exoskeleton system | PExo_t | Rigid portable | 09 February 2016 | 16 February 2021 |
| [428] | US | Motorized limb assistance device | PExo_p | Rigid portable | 02 May 2017 | 30 June 2020 |
| [429] | US | Legged robotic device utilizing modifiable linkage mechanism | PExo_t | Rigid portable | 05 May 2015 | 08 September 2020 |
| [430] | EP | Esoskeleton equipped with electro-or magneto-rheological fluid type semi-active joints | PExo_t | Rigid portable | 29 December 2017 | 07 April 2021 |
| [40] | US | Low profile exoskeleton | PExo_t | Rigid portable | 05 November 2015 | 18 February 2020 |
| [213] | US | System and method for the regeneration of at least one severed nerve conduit | PExo_t | Rigid non-portable | 20 July2018 | 02 February 2021 |
| [431] | US | Regulation of autonomic control of bladder voiding after a complete spinal cord injury | PExo_t | Rigid non-portable | 21 August 2015 | 25 August 2020 |
| [432] | EP | Movement assistance device | PExo_t | Rigid portable | 17 June 2013 | 08 January 2020 |
References
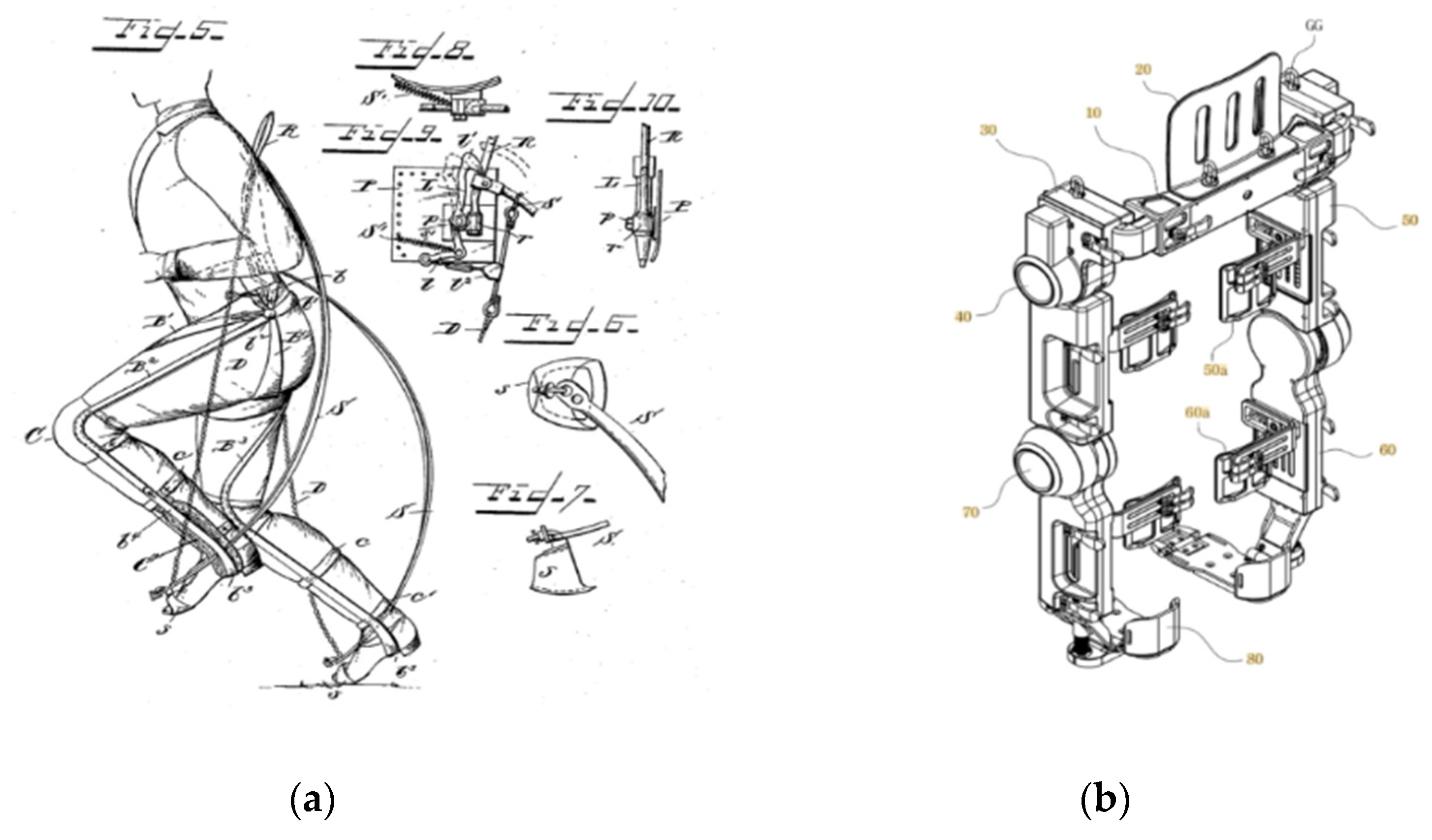
- Yagn, N. Apparatus for Facilitating Walking, Running, and Jumping. U.S. Patent 420,179, 28 January 1890. Available online: https://patentimages.storage.googleapis.com/0f/e0/2c/161bea0a876b81/US420179.pdf (accessed on 15 January 2022).
- De la Tejera, J.A.; Bustamante-Bello, R.; Ramirez-Mendoza, R.A.; Izquierdo-Reyes, J. Systematic Review of Exoskeletons towards a General Categorization Model Proposal. Appl. Sci. 2021, 11, 76. [Google Scholar] [CrossRef]
- Barjuei, E.S.; Ardakani, M.M.G.; Caldwell, D.G.; Sanguineti, M.; Ortiz, J. On the Optimal Selection of Motors and Transmissions for a Back-Support Exoskeleton. In Proceedings of the IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 19–20 September 2019; Available online: https://ieeexplore.ieee.org/document/9114465 (accessed on 15 January 2022).
- Chen, G.; Chan, C.K.; Guo, Z.; Yu, H. A review of lower extremity assistive robotic exoskeletons in rehabilitation therapy. Crit. Rev. Biomed. Eng. 2013, 41, 343–363. [Google Scholar] [CrossRef] [PubMed]
- Colombo, G.; Joerg, M.; Schreier, R.; Dietz, V. Treadmill training of paraplegic patients using a robotic orthosis. J. Rehabil. Res. Dev. 2000, 37, 693–700. [Google Scholar] [PubMed]
- Carpino, G.; Pezzola, A.; Urbano, M.; Guglielmelli, E. Assessing effectiveness and costs in robot-mediated lower limbs rehabilitation: A meta-analysis and state of the art. J. Healthc. Eng. 2018, 2018, 7492024. [Google Scholar] [CrossRef] [Green Version]
- Bruni, M.F.; Melegari, C.; De Cola, M.C.; Bramanti, A.; Bramanti, P.; Calabrò, R.S. What does best evidence tell us about robotic gait rehabilitation in stroke patients: A systematic review and meta-analysis. J. Clin. Neurosci. 2018, 48, 11–17. [Google Scholar] [CrossRef]
- Rodríguez-León, J.F.; Chaparro-Rico, B.D.M.; Russo, M.; Cafolla, D. an Autotuning Cable-Driven Device for Home Rehabilitation. J. Healthc. Eng. 2021, 2021, 6680762. [Google Scholar] [CrossRef]
- Dong, K.H.; Su, H.K.; Sil, P.J.; Ill, J.H. Lower Extremity Exoskeleton Robotic Device. KR102292983B1, 24 August 2021. Available online: https://patents.google.com/patent/KR102292983B1/en (accessed on 15 January 2022).
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Meng, W.; Liu, Q.; Zhou, Z.; Ai, Q.; Sheng, B.; Xie, S.S. Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics 2015, 31, 132–145. [Google Scholar] [CrossRef]
- Rupal, B.S.; Singla, A.; Virk, G.S. Lower limb exoskeletons: A brief review. In Proceedings of the Conference on Mechanical Engineering and Technology (COMET2016), IIT (BHU), Varanasi, India, 15–17 January 2016; pp. 130–140. [Google Scholar]
- Chen, B.; Ma, H.; Qin, L.Y.; Gao, F.; Chan, K.M.; Law, S.W. Recent developments and challenges of lower extremity exoskeletons. J. Orthop. Transl. 2016, 5, 26–37. [Google Scholar] [CrossRef] [Green Version]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A review on lower limb rehabilitation exoskeleton robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Villamañan, M.C.; Gonzalez-Vargas, J.; Torricelli, D.; Moreno, J.C.; Pons, J.L. Compliant lower limb exoskeletons: A comprehensive review on mechanical design principles. J. NeuroEng. Rehabil. 2019, 16, 55. [Google Scholar] [CrossRef]
- Koch, M.A.; Font-Llagunes, J.M. Lower-Limb Exosuits for Rehabilitation or Assistance of Human Movement: A Systematic Review. Appl. Sci. 2021, 11, 8743. [Google Scholar] [CrossRef]
- Kian, A.; Widanapathirana, G.; Josephet, A.M.; Lai, D.T.H.; Begg, R. Application of wearable sensors in actuation and control of powered ankle exoskeletons: A Comprehensive Review. Sensors 2022, 22, 2244. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; She, H.; Lu, H.; Fukuda, T.; Shen, Y. State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Appl. Sci. 2017, 7, 1182. [Google Scholar] [CrossRef] [Green Version]
- Tijjani, I.; Kumar, S.; Boukheddimi, M. A Survey on Design and Control of Lower Extremity Exoskeletons for Bipedal Walking. Appl. Sci. 2022, 12, 2395. [Google Scholar] [CrossRef]
- Meda-Gutiérrez, J.R.; Zúñiga-Avilés, L.A.; Vilchis-González, A.H.; Ávila-Vilchis, J.C. Knee Exoskeletons Design Approaches to Boost Strength Capability: A Review. Appl. Sci. 2021, 11, 9990. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, S.; Xue, Q. Lower limb rehabilitation exoskeleton robot: A review. Adv. Mech. Eng. 2021, 13, 16878140211011862. [Google Scholar] [CrossRef]
- Rupal, B.S.; Rafique, S.; Singla, A.; Singla, E.; Isaksson, M.; Virk, G.S. Lower-limb exoskeletons: Research trends and regulatory guidelines in medical and non-medical applications. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417743554. [Google Scholar] [CrossRef]
- Contreras-Vidal, J.L.; Bhagat, N.A.; Brantley, J.; Cruz-Garza, J.G.; He, Y.; Manley, Q.; Nakagome, S.; Nathan, K.; Tan, S.H.; Zhu, F.; et al. Powered exoskeletons for bipedal locomotion after spinal cord injury. J. Neural Eng. 2016, 13, 031001. [Google Scholar] [CrossRef]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. NeuroEng. Rehabil. 2021, 18, 119. [Google Scholar] [CrossRef]
- Shorter, K.A.; Xia, J.; Hsiao-Wecksler, E.T.; Durfee, W.K.; Kogler, G.F. Technologies for powered ankle-foot orthotic systems: Possibilities and challenges. IEEE/ASME Trans. Mech. 2013, 18, 337–347. [Google Scholar] [CrossRef]
- Aviv-Reuven, S.; Rosenfeld, A. Publication patterns’ changes due to the COVID-19 pandemic: A longitudinal and short-term scientometric analysis. Scientometrics 2021, 126, 6761–6784. [Google Scholar] [CrossRef] [PubMed]
- Unluhisarcikli, O. Lower Extremity Exoskeleton for Gait Retraining. U.S. Patent 20130226048, 29 August 2013. [Google Scholar]
- Jianjuen, H. Lower Extremity Robotic Rehabilitation System. U.S. Patent 20140100491, 10 April 2014. [Google Scholar]
- Walsh, C.J. Orthopedic Device Including Protruding Members. U.S. Patent 20170027735, 2 February 2017. [Google Scholar]
- Cheng, W. Lower Extremity Exoskeleton Control Method and ApparatusShenzhen Milebot Robot. Cn-110812127, 21 February 2020. [Google Scholar]
- Anindo, R. Method and Apparatus for Providing Economical, Portable Deficit-Adjusted Adaptive Assistance During Movement Phases of an Impaired Ankle. Ep-3878603, 15 September 2021. [Google Scholar]
- Zoss, A. Powered Orthotic System for Cooperative Overground Rehabilitation. U.S. Patent 20160030201, 4 February 2016. [Google Scholar]
- Goffer, A. Gait Device with a Crutch. U.S. Patent 10137050-B2, 27 November 2018. [Google Scholar]
- Johnson, C.L. Patient Aid Devices, Particularly for Mobile Upper Extremity Support in Railed Devices Such as Parallel Bars and Treadmills. U.S. Patent 10617906-B2, 14 April 2020. [Google Scholar]
- Lee, J.M.; Kim, H.; Kim, S.J.; Choi, J.; Hwang, Y.; Chung, S.; Kim, Y.; Choi, J. Recognition Method of Human Walking Speed Intention from Surface Electromyogram Signals of Plantar Flexor and Walking Speed Control Method of a Lower-Limb Exoskeleton Robot. U.S. Patent 10434027-B2, 8 October 2019. [Google Scholar]
- Hyun, Y.S.; Baek, L.G.; Gyeong, L.C. Walk Assist Apparatus. Kr-101368817-B1, 3 March 2014. [Google Scholar]
- Kim Hyun, I.; Kim Hyun, A. Wearable Crutch with Lap Joints. Kr-101530525-B1, 23 June 2015. [Google Scholar]
- Tong, K.Y.; Ockenfeld, C.U.; Yeung, L.F.; Ho, S.K.; Wai, H.W.; Pang, M.K. Interactive Exoskeleton Robotic Knee System. U.S. Patent 10390973-B2, 27 August 2019. [Google Scholar]
- Won, Y.J.; Hun, P.S. Active Type Step Assistance Apparatus. Kr-101471856-B1, 12 December 2014. [Google Scholar]
- LaChappelle, E.J.; Blue, A. Low Profile Exoskeleton. U.S. Patent 10561564-B2, 18 February 2020. [Google Scholar]
- Lee, L.W.; Chiang, H.H. Multi-Function Lower Limb Ambulation Rehabilitation and Walking Assist Device. U.S. Patent 9789023-B1, 17 October 2017. [Google Scholar]
- Walsh, C.; Asbeck, A.T.; Ye, D.; Bujanda, I.G.; De Rossi, S.M.M. For Aiding in the Soft Machine Armor of Human Motion. Cn-105263448-B, 4 May 2018. [Google Scholar]
- Asbeck, A.T.; Bujanda, I.G.; Ding, Y.; Dyer, R.J.; Larusson, A.F.; Quinlivan, B.T.; Schmidt, K.; Wagner, D.; Walsh, C.J.; Wehner, M. Soft Exterior Protector for Aiding in Human Motion. Cn-104869969-B, 9 June 2017. [Google Scholar]
- Kyung, S.W.; Young, L.H. Gait Assistant Robot. Kr-101656695-B1, 13 September 2016. [Google Scholar]
- Lee, J.W.; Kim, H.Y. Robot for Assisting User to Walk. Kr-101979938-B1, 20 May 2019. [Google Scholar]
- Legaz, J.G.; Herruzo, B.B. System to Assist Walk. Es-2618285-B1, 6 April 2018. [Google Scholar]
- Lee, J.W.; Kim, H.Y. Robot for Assisting User to Walk with Lower Body Exoskeleton. Kr-101869968-B1, 21 June 2018. [Google Scholar]
- Cao, H.; MO, S.; Zhu, J.; Wang, Y.; Jiang, J.; Chen, Y.; Cui, J.; Zhang, Y. Rehabilitation Type Lower Limb Exoskeleton. Cn-109044742-B, 13 March 2020. [Google Scholar]
- Tong, K.Y.; Yeung, L.F.; Ockenfeld, C.U.; Ho, S.K.; Wai, H.W.; Pang, M.K. Exoskeleton Ankle Robot. U.S. Patent 10426637-B2, 1 October 2019. [Google Scholar]
- Borisoff, J.; Rafer, V. Mobility System Including an Exoskeleton Assembly Releasably Supported on a Wheeled Base. U.S. Patent 9849048-B2, 26 December 2017. [Google Scholar]
- Won, K.S.; Hwi, Y.L. Rehabilitation Robot of Legs, Boarding and Driving Method Thereof. Kr-101955925-B1, 12 March 2019. [Google Scholar]
- Linon, R. Support Structure. Es-2759298-T3, 8 May 2020. [Google Scholar]
- Ang, X.; Gan, Z. Wearable Lower Limb Exoskeleton Driven by Lasso Artificial Muscles. Cn-107468487-B, 3 November 2020. [Google Scholar]
- Armada, E.G.; Cestari Soto, M.J.; Sanz Merodio, D.; Carrillo De Hijes, X. Exo Skeleton for Human Movement Assistance. Es-2575255-B1, 6 April 2017. [Google Scholar]
- Yang, C.; Wang, H.; Yang, W.; Ma, Z.; Wei, Q.; Zhao, Y. A Kind of Lower Limb Rehabilitation Exoskeleton System and Its Walking Control Method. Cn-108379038-B, 9 July 2019. [Google Scholar]
- Mun, J.H.; Youn, S.H.; Joo, S.B.; Sim, T.Y.; Choi, A.R. Wearable Apparatus for Support Holding Posture. Kr-101774152-B1, 4 September 2017. [Google Scholar]
- Lee, C.S.; Li, I.H.; Chiang, H.H.; Lee, L.W.; Hong, F.C.; Chen, R.P.; Chen, W.G. Pneumatic Lower Extremity Gait Rehabilitation Training System. U.S. Patent 10292892-B2, 21 May 2019. [Google Scholar]
- Walsh, C.J.; Goldfield, E.C.; Song, S.E.; Park, E. Systems, Methods, and Devices for Assisting Walking for Developmentally-Delayed Toddlers. U.S. Patent 10278883-B2, 7 May 2019. [Google Scholar]
- Si, G.; Xu, F.; Li, G.; Huang, W.; Chu, M. Variable-Rigidity Flexible Driver for Exoskeleton Type Lower Limb Rehabilitation Robot. Cn-108309688-B, 6 December 2019. [Google Scholar]
- Cook, D.L. Actuation System for a Joint. U.S. Patent 9498354-B2, 22 November 2016. [Google Scholar]
- Yang, C.; Yang, W.; Xu, L.; Wang, H.; Wei, Q.; Ma, Z. Lower Limb Rehabilitation Training Exoskeleton System and Its Walking Control Method and Hip Joint Structure. Cn-108392378-B, 20 September 2019. [Google Scholar]
- Jang, W.Y.; Lee, S.H.; Lee, J.H. Weight Bearing Brace. Kr-101997997-B1, 8 July 2019. [Google Scholar]
- Taek, J.I.; Park, Y.D. Training System for Leg Rehabilatation Having Saparated Treadmill. Kr-101275030-B1, 17 June 2013. [Google Scholar]
- Wei, X.; Cao, W.; Wei, W.; Cheng, G.; Lu, H.; Yu, H.; Hu, B.; Meng, Q. Wearable Lower Limb Exoskeleton Rehabilitation Robot. Cn-107811805-B, 21 February 2020. [Google Scholar]
- Unluhisarcikli, O.; Mavroidis, C.; Bonato, P.; Pietrusisnki, M.; Weinberg, B. Lower Extremity Exoskeleton for Gait Retraining. U.S. Patent 9198821-B2, 1 December 2015. [Google Scholar]
- Guo, C.; Xiao, X.; Zhang, C.; Zhou, J. A Kind of Bionical Lower Limb Exoskeleton Robot Driven Based on Rope. Cn-106956243-B, 2 August 2019. [Google Scholar]
- Zou, Y.; Wang, N.; Liu, K.; Li, J.; Geng, X.; Huang, Y. Movable Parallel Flexible Cable Driven Lower Limb Rehabilitation Robot and Implementation Method Thereof. Cn-108606907-B, 18 February 2020. [Google Scholar]
- Wu, X.; Peng, A.; Wang, C.; Chen, C.; Liu, D.; Feng, W. Wearable Lower Limb Exoskeleton Robot. Cn-106109186-B, 14 August 2018. [Google Scholar]
- Accoto, D.; Sergi, F.; Carpino, G.; Tagliamonte, N.L.; Galzerano, S.; Di Palo, M.; Guglielmelli, E. Robotic Device for Assistance and Rehabilitation of Lower Limbs. Ep-2906172-B1, 21 December 2016. [Google Scholar]
- Aguirre-Ollinger, G.; Nagarajan, U.; Goswami, A. Admittance Shaping Controller for Exoskeleton Assistance of the Lower Extremities. U.S. Patent 9907722-B2, 6 March 2018. [Google Scholar]
- Lu, T.; Tao, X.; Chang, H.; Yi, J. Exoskeleton-Type Moves Walking Rehabilitation Training Device and Method. Cn-105456004-B, 1 February 2019. [Google Scholar]
- Gao, Y.; Liu, Y.; Zhu, Y. Based on Rope-Pulley Mechanism Drive Lacking Lower Limb Assistance Exoskeleton Robot. Cn-107137207-B, 17 May 2019. [Google Scholar]
- Sun, K.C.; Tsai, Y.J.; Wu, C.H.; Hu, J.S. Method for Estimating Posture of Robotic Walking Aid. Ep-3173191-B1, 17 March 2021. [Google Scholar]
- Herr, H.M.; Casler, R.; Han, Z. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 8419804-B2, 16 April 2013. [Google Scholar]
- Shi, X.; Li, Z.; Lin, S.; Zhu, J.; Liao, Z. A Kind of Dedicated Power-Assisted Healing Robot of Single Lower Limb Individuals with Disabilities. Cn-107411939-B, 27 September 2019. [Google Scholar]
- Noda, T.; Morimoto, J. Actuator Device, Power Assist Robot and Humanoid Robot. Jp-5906506-B1, 20 April 2016. [Google Scholar]
- Chung, H.I.; Kweon, H.D.; Ha, K.S.; Park, H. Monitoring System of Walking Balance for Lower Limb Rehabilitation. Kr-102014162-B1, 26 August 2019. [Google Scholar]
- Grandmaison, C.; Sensinger, J. Powered Lower Limb Devices and Methods of Control Thereof. U.S. Patent 11191653-B2, 7 December 2021. [Google Scholar]
- Liu, H.; Liu, G. A Kind of Artificial Intelligence Motion’s Auxiliary Equipment. Cn-105213155-B, 29 March 2017. [Google Scholar]
- Noda, T.; Nakata, Y.; Ishiguro, H.; Morimoto, J. Actuator Device, Humanoid Robot and Power Assist Device. Jp-6035590-B2, 30 November 2016. [Google Scholar]
- Herr, H.M.; Kuan, J.Y. Robotic System for Simulating a Wearable Device and Method of Use. U.S. Patent 9498401-B2, 22 November 2016. [Google Scholar]
- Agrawal, S.; Mankala, K.K.; Banala, S. Passive Swing Assist Leg Exoskeleton. U.S. Patent 8900167-B2, 2 December 2014. [Google Scholar]
- Smith, F.M. Forward or Rearward Oriented Exoskeleton. Ep-2942044-B1, 19 January 2022. [Google Scholar]
- Kapure, K.; Mudgal, G.; Shah, U.; Goyal, K.K.; Dahiya, S. Apparatus and System for Limb Rehabilitation. U.S. Patent 10492977-B2, 3 December 2019. [Google Scholar]
- Goldfarb, M.; Murray, S. Movement Assist Device. Es-2773853-T3, 15 July 2020. [Google Scholar]
- Han, J.W.; Kim, Y.H.; Min, D.M.; Lee, J.H. Sitting Type Walking Rehabilitation Robot. Cn-107708641-B, 12 January 2021. [Google Scholar]
- Agrawal, S.K.; Vashista, V.; Kang, J.; Jin, X. Human Movement Research, Therapeutic, and Diagnostic Devices, Methods, and Systems. Ep-3133998-B1, 3 July 2019. [Google Scholar]
- Chen, B.; Zi, B.; Wang, D.; Wang, Z.; Qian, S. Hip Joint Rehabilitation Exoskeleton Based on Multifunctional Driver and Motion Control Method Thereof. Cn-109172289-B, 23 February 2021. [Google Scholar]
- Kim, J.Y.; Moon, K.; Shim, Y.B.; Lee, J.S. Wearable Robot and Control Method Thereof. U.S. Patent 10201437-B2, 12 February 2019. [Google Scholar]
- Roh, C.H. Wearable Robot and Method for Controlling the Same. U.S. Patent 10556335-B2, 11 February 2020. [Google Scholar]
- Huang, J.; Huang, Z.; Tu, X.; Zhang, H.; Xiong, C. A Kind of Link-Type Lower Limb Exoskeleton Rehabilitation Robot. Cn-107260483-B, 26 June 2018. [Google Scholar]
- Tsai, Y.J.; Teng, M.C. Exoskeleton Robot. Jp-6729870-B2, 29 July 2020. [Google Scholar]
- Amundson, K.; Harding, N.; Stryker, J. Interface for the Movement by Externally Applied Force Motivation of Adjustment Orthopedic Appliance. Cn-104936570-B, 9 October 2018. [Google Scholar]
- Roy, A.; Forrester, L.W.; Macko, R.F. Method and Apparatus for Providing Deficit-Adjusted Adaptive Assistance During Movement Phases of an Impaired Joint. U.S. Patent 9943459-B2, 17 April 2018. [Google Scholar]
- Little, R. Walking Aid. Cn-105899177-B, 11 September 2020. [Google Scholar]
- Fu, C.; Chang, Y.; Wang, W. A Kind of Quasi—Passive Knee Ankle-Joint Coupling Lower Limb Exoskeleton and Its Control Method. Cn-107126348-B, 18 June 2019. [Google Scholar]
- Roy, A.; Macko, R.F. Method and Apparatus for Providing Economical, Portable Deficit-Adjusted Adaptive Assistance During Movement Phases of an Impaired Ankle. Ca-2989421-C, 24 March 2020. [Google Scholar]
- Julin, A.; Hughes, M. Ball Screw and Tensile Member Exoskeleton Joint Actuation Device. Ep-3243606-B1, 16 February 2022. [Google Scholar]
- Robot for Assisting User to Walk. Kr-101988644-B1, 12 June 2019.
- Zoss, A.; Evans, J.; Sandler, R.; Harding, N.; Julin, A.; Lubin, J.; Heanue, T.; Fairbanks, D.; Stryker, J. Reconfigurable Ectoskeleton. Cn-104869970-B, 29 September 2017. [Google Scholar]
- Einav, O. Gait Rehabilitation Methods and Apparatuses. U.S. Patent 8888723-B2, 18 November 2014. [Google Scholar]
- Smith, J.; Bhugra, K. Methods of Operating an Exoskeleton for Gait Assistance and Rehabilitation. U.S. Patent 9545353-B2, 17 January 2017. [Google Scholar]
- Agrawal, S.; Banala, S. Powered Orthosis. U.S. Patent 8147436-B2, 3 April 2012. [Google Scholar]
- Kim, S.W.; Chung, S.G.; Kim, H.C.; Beom, J.W.; Nam, H.S.; Lee, C.W. A Treatment Device for Hemiplegia. Kr-101511427-B1, 10 April 2015. [Google Scholar]
- Farris, R.; Clausen, M.; Wilson, E. Wearable Robotic Device. U.S. Patent 11141342-B2, 12 October 2021. [Google Scholar]
- Kazerooni, H.; Amundson, K.; Angold, R.; Harding, N. An Exoskeleton and Method for Controlling a Swing Leg of the Exoskeleton. Ep-2346447-B1, 4 September 2019. [Google Scholar]
- Sankai, Y. Wearing Tool for Measuring Biological Signal, and Wearing-Type Motion Assisting Device. Kr-101226169-B1, 24 January 2013. [Google Scholar]
- Jeon, D.Y.; Moon, H.S.; Kwak, S.U.; Lee, J.H. Wheelchair Walking Assist Robot. Jp-5400890-B2, 29 January 2014. [Google Scholar]
- Yuan, B.; Jiang, F.; Jiang, M.; Li, J.; Sun, Z. Reduction Exoskeleton Joint and Exoskeleton Power Assisting Device Thereof. Cn-106109181-B, 14 April 2020. [Google Scholar]
- Patton, J.L.; Peshkin, M.A.; Sulzer, J.S. Cable Driven Joint Actuator and Method. U.S. Patent 9597217-B2, 21 March 2017. [Google Scholar]
- Walsh, C.J.; Asbeck, A.T.; Yarri, M.W.; Cochran, J.C.; De Rossi, S.M.M. Orthopedic Device Including Protruding Members. U.S. Patent 10864100-B2, 15 December 2020. [Google Scholar]
- Chen, W.; Wu, S.; Zhou, T.; Xiong, C. A Kind of Passive Exoskeleton Device of Hip Joint Based on Energy Timesharing Regulation. Cn-108095980-B, 22 November 2019. [Google Scholar]
- Zoss, A.; Musick, D.; Harding, N. Methods of Enhancing the Rehabilitation or Training of an Exoskeleton Wearer. U.S. Patent 10576008-B2, 3 March 2020. [Google Scholar]
- Lee, J.W.; Kim, H.Y. Robot for Assisting User to Walk. Kr-101979937-B1, 20 May 2019. [Google Scholar]
- Nakashima, I.; Manabe, S. Leg Support Device. Ep-2583657-B1, 18 February 2015. [Google Scholar]
- Lear, M.C.; Witherspoon, K.G.; Grant, M.; Kernbaum, N.I.; Mahoney, R.; Tayson-Frederick, M.L.; Fielding, L.C.; Riggs, V.; Shahoian, E.; Hogue, M.E. Systems and Methods for Assistive Exosuit System. U.S. Patent 10926123-B2, 23 February 2021. [Google Scholar]
- Amundson, K.; Angold, R.; Harding, N.; Kazerooni, H. Device and Method for Reducing a Person’s Oxygen Consumption During a Regular Walk by Using a Load-Bearing Exoskeleton. Es-2549004-T3, 22 October 2015. [Google Scholar]
- Homayoon, K.; Kurt, A.; Nathan, H. Device and Method for Decreasing Energy Consumption of a Person by Use of a Lower Extremity Exoskeleton. Cn-102088933-B, 18 March 2015. [Google Scholar]
- Smith, F.; Olivier, M. Walking Robot System That Regenerates Energy. Jp-6927912-B2, 1 September 2021. [Google Scholar]
- Zhang, J.; Yu, T. It Is Single to Drive Bionical Gait Rehabilitation Training Robot System. Cn-106420271-B, 30 November 2018. [Google Scholar]
- Jacobsen, S.C.; Olivier, M.X.; Maclean, B.J. Control Logic for Biomimetic Joint Actuators. U.S. Patent 8731716-B2, 20 May 2014. [Google Scholar]
- Smith, F. Legged Robotic Device Utilizing Modifiable Linkage Mechanism. Kr-101778025-B1, 13 September 2017. [Google Scholar]
- Dong, W.; Chen, C.; Du, Z.; Mao, W. Lower Limb Exoskeleton Robot System Based on Man-Machine Terminal Interaction. Cn-109223456-B, 13 October 2020. [Google Scholar]
- Bouton, C.E.; Annetta, N.; Friedenberg, D.A.; Sharma, G. Systems for Neural Bridging of the Nervous System. U.S. Patent 10857358-B2, 08 December 2020. [Google Scholar]
- Wang, X.; Jiang, C. Use the Lower Limb Exoskeleton Robot Control Method of Air Bag Sensor. Cn-105796286-B, 6 April 2018. [Google Scholar]
- Morbi, A.; Ahmadi, M.; Beranek, R. Control System and Device for Patient Assist. Ca-2867484-C, 9 October 2018. [Google Scholar]
- Angold, R.; Harding, N.H.; Kazerooni, H. Semi-Motorized Exoskeleton of the Lower Extremities. Es-2491218-T3, 5 September 2014. [Google Scholar]
- Stephen, J.; Marc, O. Contact Displacement Actuator System. Cn-101489732-B, 28 January 2015. [Google Scholar]
- Menga, G. System for Controlling a Robotic Device during Walking, in Particular for Rehabilitation Purposes, and Corresponding Robotic Device. Ep-2497610-B1, 22 October 2014. [Google Scholar]
- Lee, J.W.; Kim, H.Y. Robot for Assisting User to Walk. Kr-102334854-B1, 3 December 2021. [Google Scholar]
- Ye, Z.; Liu, P.; Lu, J.Y.; Yue, J. Lower Limb Rehabilitation Walking-Aid Robot Supporting Omnidirectional Movement and Control Method. Cn-107149539-B, 24 March 2020. [Google Scholar]
- Ou, M.; Jiegao, W. Apparatus and Method for Reduced-Gravity Simulation. U.S. Patent 8152699-B1, 10 April 2012. [Google Scholar]
- Zoss, A.; Swift, T.; Berg, A.; Strausser, K.; John, E.S. Powered Orthopedic System for Cooperative Above-Ground Rehabilitation. Es-2886134-T3, 16 December 2021. [Google Scholar]
- Huang, J.; Yan, Q.; Cao, H. Walking Stick Type Autonomous Falling Protection Rehabilitation Walking-Aid Robot. Cn-107693314-B, 14 July 2020. [Google Scholar]
- Song, Z.; Yan, P.; Hu, Y.; Tian, C.; Jia, C.; Deng, X. The Ectoskeleton Wheelchair Integrated Mobile Auxiliary Robot of Telescopic. Cn-106420203-B, 20 April 2018. [Google Scholar]
- Wang, B.; Xu, D.; Wang, Z.; Liu, G.; Yang, W.; Wang, Y.; Hu, F. A Kind of Link Joint Integrated Hydraulic Driving Ectoskeleton. Cn-105686930-B, 20 November 2018. [Google Scholar]
- Song, S.; Zhao, M.; Zou, Z.; Bai, P.; Chen, W.; Sun, J. Collapsible Mobile Lower Limb Exoskeleton. Cn-105686927-B, 11 July 2017. [Google Scholar]
- Zhao, K.; Zhang, L.; Yi, W. Lower Limb Rehabilitation Robot Based on Bidirectional Neural Interface. Cn-109199786-B, 30 July 2021. [Google Scholar]
- Zhang, J.; Collins, S.H. Torque Control Methods for an Exoskeleton Device. U.S. Patent 10555865-B2, 11 February 2020. [Google Scholar]
- Park, H.S.; Lee, D.W.; Jung, J.Y. Sensor System for a User’s Intention Following and Walk Supporting Robot. Kr-101171225-B1, 6 August 2012. [Google Scholar]
- Ahn, S.H.; Kwon, Y.D.; Shim, Y.B.; Suk, J.Y. Walking Assist Robot and Control Method Thereof. U.S. Patent 9655805-B2, 23 May 2017. [Google Scholar]
- Yang, W.; Xu, L.; Cao, B.; Peng, Z.; Canjun, Y. Lower Limb Exoskeleton System with Actively Adjustable Leg Rod Length and Control Method Thereof. Cn-111805511-B, 14 September 2021. [Google Scholar]
- Wu, Q.; Zhu, Y.; Chen, B.; Chen, X.; Xu, D. Variable-Rigidity Lower Limb Exoskeleton Power-Assisted Robot. Cn-110652425-B, 17 December 2021. [Google Scholar]
- Huang, L.; Chen, C.; Liu, X.; Lu, X.; Sun, H. Wearable Lower Limb Healing Robot Based on Ectoskeleton. Cn-105997441-B, 23 January 2018. [Google Scholar]
- Wang, X.; Xi, R.; Zhu, Z. A Kind of Passive Energy Storage Foot Mechanism for Lower Limb Assistance Exoskeleton. Cn-105616113-B, 20 October 2017. [Google Scholar]
- Yang, J.; Li, Z. Lower Limb Rehabilitation Robot Movement Intention Reasoning Method. Cn-109953761-B, 22 October 2021. [Google Scholar]
- Wang, J.; Zhang, K.; Guo, X.; Li, M. Portable Ankle Joint Rehabilitation Robot Based on Active Intention Control. Cn-107997929-B, 1 September 2020. [Google Scholar]
- Chen, W.; Wei, T.; Zhou, T.; Wu, S.; Xiong, C. A Kind of Passive Exoskeleton Device of Hip Knee Doublejointed Based on Clutch Timesharing Regulation. Cn-109528451-B, 8 October 2019. [Google Scholar]
- Zhang, D.; Gui, K. Exoskeleton Hybrid Control System and Method for Lower Limb Walking Aid Machine. Cn-106112985-B, 22 May 2020. [Google Scholar]
- Patoglu, V. Reconfigurable Ankle Exoskeleton Device. U.S. Patent 8366591-B2, 5 February 2013. [Google Scholar]
- Belforte, G.; Eula, G.; Appendino, S.; Geminiani, G.C.; Zettin, M. Active Orthosis for the Neurological Rehabilitation of the Movement of the Lower Limbs, a System Comprising Said Orthosis and a Process to Put Said System into Operation. Es-2666382-T3, 04 May 2018. [Google Scholar]
- Wu, C.; Ye, J.; Chen, G.; Zhang, X.; Hu, G.; Guo, D. Lower Limb Exoskeleton Control Method and Device. Cn-110812127-B, 4 January 2022. [Google Scholar]
- Zhang, L. A Kind of Wearable Flexible Lower Limb Exoskeleton Based on Negative Pressure Rotary Pneumatic Artificial-Muscle. Cn-108542718-B, 26 July 2019. [Google Scholar]
- Zhang, L.; Jiang, Y.; Xie, C.; Jiang, X.; Chen, H.; Zhang, Z.; Li, G.; Ma, J. A Kind of Portable Waist Hunting Gear. Cn-105232293-B, 11 July 2017. [Google Scholar]
- Ping, Y. A Kind of Unweighting Walking Rehabilitation Training Robot. Cn-105726272-B, 16 October 2018. [Google Scholar]
- Zhang, L.; Huang, Q.; Wang, W.; Wang, Z. A Kind of Wearable Flexible Knee Joint Robotic Exoskeleton Equipment Based on Gait. Cn-106420279-B, 9 April 2019. [Google Scholar]
- Zhang, X.; Zheng, W.; Xiao, P.; Dong, Z.; Li, Y.; Zuo, G.; Cheng, Y. Semi-Automatic Bone Installations of Pulling Together. Cn-105919779-B, 9 March 2018. [Google Scholar]
- Vitiello, N.; Giovacchini, F.; Cempini, M.; Fantozzi, M.; Moise, M.; Muscolo, M.; Cortese, M. Actuation System for Hip Joint Orthosis. Ru-2708223-C2, 4 December 2019. [Google Scholar]
- Dong, W.; Du, Z.; Chen, C.; Mao, W. Lower Limb Exoskeleton Heterogeneous Knee Joint Based on Parallel Elastomers. Cn-109528453-B, 15 June 2021. [Google Scholar]
- Katherine, G.W.; Alexander, S.K. Flexible Body Harness. Cn-210277443-U, 10 April 2020. [Google Scholar]
- Ye, J.; Chen, G.; Xu, F.; Jiang, L.; Feng, J.; Zhang, X.; Hu, G.; Liu, S.; Li, Y. Lower Limb Training Rehabilitation Apparatus. U.S. Patent 11166866-B2, 9 November 2021. [Google Scholar]
- Chen, B.; Wang, B. Motion Control Method Suitable for Exoskeleton Robot. Cn-111604890-B, 25 May 2021. [Google Scholar]
- Hou, L.; Zhou, Y.; Wang, L.; Qiu, J.; Cheng, H.; Zhao, E. Anti-Falling System Based on Lower Limb Exoskeleton Robot. Cn-108836759-B, 29 December 2020. [Google Scholar]
- Du, F.; Mu, X.; Chen, J.; Jiang, Z.; Ma, Z.; Zhao, Z.; Zhao, X.; Guo, H.; Song, G.; Wang, J. A Kind of Lower Limb Exoskeleton Robot. Cn-106137687-B, 5 September 2017. [Google Scholar]
- Zhang, L.; Huang, Q. A Kind of Unpowered Wearable Auxiliary Walking Servomechanism. Cn-106491318-B, 25 December 2018. [Google Scholar]
- A Kind of Sufficient Isomorphism Deformation Type Wheelchair Exoskeleton Robot of Wheel. Cn-108309593-B, 3 December 2019.
- Zhu, Y.; Hua, Y.; Zhang, G.; Li, M. Overload Slipping Mechanism of Lower Limb Exoskeleton Robot. Cn-109998859-B, 8 October 2021. [Google Scholar]
- Huang, Z.; Huang, Y. The External Bone Robot of Hemiparalysis Recovery Type. Cn-106063760-B, 12 October 2018. [Google Scholar]
- Chen, Y.; Qiang, C.; Cao, Y.; Yang, M.; Sun, F. A Kind of Exoskeleton Robot. Cn-106580637-B, 28 December 2018. [Google Scholar]
- Sankai, Y. Life Activity Detection Device and Life Activity Detection System Cyberdyne. Jp-6742196-B2, 19 August 2020. [Google Scholar]
- Han, C.S.; Lee, S.; Choi, Y.S.; Soonwoong, H.; Kim, B.; Hwang, S.H. Walking Assistance Apparatus and Operation Method of the Same. Kr-101991588-B1, 20 June 2019. [Google Scholar]
- Tang, S.; Cao, J.; Wang, G.; Li, J.; Guo, Z. Human Lower Limb Assisting Device. Cn-109464264-B, 18 September 2020. [Google Scholar]
- Umashankar, N.; Ambarish, G. Control Design Framework for Resistant Exoskeleton. Jp-6800634-B2, 16 December 2020. [Google Scholar]
- Li, M.; Wang, X.; Ren, G.; Wang, D.; Sun, C.; Yu, K.; He, J. Auxiliary Exercise System and Lower Limb Exoskeleton Control Method. Cn-110292506-B, 18 May 2021. [Google Scholar]
- Cheng, H.; Wang, F.; Li, Z.; Qiu, J.; Yin, Z. A Kind of the Lower Limb Exoskeleton Training Method and System of the Triggering of Mental Imagery Pattern Brain-Computer Interface. Cn-105708587-B, 3 November 2020. [Google Scholar]
- Hou, L.; Zhou, Y.; Zhao, E.; Qiu, J.; Cheng, H.; Huang, P.; Chen, C. Human Motion Intention Recognition Control Device and Control Method. Cn-109498375-B, 25 December 2020. [Google Scholar]
- Ji, Y.H.; Shin, D.B.; Hwang, S.H.; Han, Y.H.; Lee, S.C.; Jang, H.Y.; Han, C.S. Ankle Module for Gait Rehabilitation Robot. Kr-101912920-B1, 28 December 2018. [Google Scholar]
- Kap, H.S.; Jong, B.H.; Jongil, L.; Kyon, M.Y.; Seokjae, L.; Sohn, D.S. Soft Exo Suit for Fall Prevention and Gait Assistance. Kr-102027069-B1, 30 September 2019. [Google Scholar]
- Ming, D.; Jiang, S.; Wang, Z.; Xu, M.; Zhao, X.; Qi, H.; Zhou, P. The Ectoskeleton Walk Help System Driven with Functional Muscle Electric Stimulation. Cn-106334265-B, 8 January 2019. [Google Scholar]
- De Sapio, V.; Goldfarb, S.E.; Ziegler, M. Integrated Platform to Monitor and Analyze Individual Progress in Physical and Cognitive Tasks. U.S. Patent 10532000-B1, 14 January 2020. [Google Scholar]
- Shen, C.; Zhu, X.; Yin, M.; Cheng, H.; Huang, R.; Xue, H. Human Motion Trend Detection Device and Detection Method Based on Force Sensor. Cn-105596018-B, 28 July 2020. [Google Scholar]
- Peng, A.; Wu, X.; Chen, C.; Wang, C.; Liu, D.; Feng, W. Exoskeleton Robot Leg Exercise System. Cn-106236517-B, 7 September 2018. [Google Scholar]
- He, F.; Huang, H.; Liu, Y.; Zhou, X.; Liu, L. Online Step Generation Control System for Exoskeleton Robot Contralateral Training. Cn-112220650-B, 16 April 2021. [Google Scholar]
- Zhang, G.; Liu, H.; Wang, X.; Gao, K.; Chen, S. A Kind of Detachable Recovery Set for Lower Limbs and Control Method. Cn-106726369-B, 30 April 2019. [Google Scholar]
- Park, K.T.; Nam, B.; Son, J.K.; Yu, S.; Lee, W. Adaptive Assistive And/or Rehabilitative Device and System. Ep-3524218-B1, 8 September 2021. [Google Scholar]
- Son, J.K.; Nam, B.; Park, K.T.; Yu, S.; Lee, W. Wearable Assistive Device That Efficiently Delivers Assistive Force. U.S. Patent 10792209-B2, 6 October 2020. [Google Scholar]
- Tüttemann, M.; Vogel, C. Leg Straightening Device and Straightening Device. Jp-6647225-B2, 14 February 2020. [Google Scholar]
- Zhang, D.; Gui, K. The Lower Limb Rehabilitation Ectoskeleton Control System and Method That Subject Dominates. Cn-106214427-B, 24 May 2019. [Google Scholar]
- Song, K.T.; Ko, C.L. Walking Rehabilitation Robot System. Tw-I702977-B, 1 September 2020. [Google Scholar]
- Gong, G.C.; Lee, J.M.; Kim, Y.S.; Yoon, S.H.; Kwon, C.M.; Im, M.J. Ankle Assist Apparatus. Kr-102018436-B1, 5 September 2019. [Google Scholar]
- In, N.; Yang, Z.; Sun, Y.; Wang, Y.; Fang, Y. A Kind of Single Rope Towards Gait and Balance Rehabilitation Training Suspends Active Loss of Weight System in Midair. Cn-106236519-B, 10 July 2018. [Google Scholar]
- Jinglun, S.; Yanfang, W.; Huai, H.; Bin, Y. Convalescence Device Walking Trigger Control Method Based on Trunk Centre-of Gravity Shift. Cn-105326627-B, 13 April 2018. [Google Scholar]
- Xiaodong, Z.; Gui, Y.; Guangyue, L.; Liangliang, L.; Qinyi, S.; Runlin, D.; Hanzhe, L. Brain-Myoelectricity Fusion Small-World Neural Network Prediction Method for Human Lower Limb Movement. Cn-111714339-B, 7 September 2021. [Google Scholar]
- Wang, C.; Duan, L.; Liu, Q.; Shen, Y.; Shang, W.; Lin, Z.; Sun, T.; Xia, J.; Sun, Z.; Chen, X.; et al. Assisted Rehabilitation Training Robot. Jp-6555790-B2, 7 August 2019. [Google Scholar]
- Lee, D.-C. Wearable Soft Exoskeleton Apparatus. Kr-101814676-B1, 4 January 2018. [Google Scholar]
- Zhi, L.; Wenkang, Z.; Jianmin, L.; Qiang, W.; Hongliang, L.; Li, W. Walking Aid for Hemiplegia Patients. Cn-108670732-B, 30 June 2020. [Google Scholar]
- Sawicki, J.T.; Laubscher, C.A.; Farris, R.J.; Etheridge, S.J.-S. Drive Device for Motorized Orthosis. Es-2858316-T3, 30 September 2021. [Google Scholar]
- Choi, J.D.; Kwon, Y.D.; Kim, G.R.; Kim, J.M.; Shim, Y.B.; Ha, T.S. Wearable Robot and Control Method for the Same. Kr-102146363-B1, 20 August 2020. [Google Scholar]
- Arzanpour, S.; Sadeqi, S.; Bourgeois, S.; Park, J.W. System and Device for Guiding and Detecting Motions of 3-Dof Rotational Target Joint. U.S. Patent 11135120-B2, 5 October 2021. [Google Scholar]
- Patlogu, V. Ankle Treatment and Exoskeleton Measurement Device Not Making Contact with Ground, Capable of Being Worn and Capable of Being Reconstructed. Cn-203662948-U, 25 June 2014. [Google Scholar]
- Tao, H. A Kind of Unpowered Walking Power-Assisted Flexible Exoskeleton Device. Cn-108354785-B, 20 September 2019. [Google Scholar]
- Xinyu, G.; Yinbo, L.; Renhao, L.; Qinghui, M.; Linhong, J. Lower Limb Exoskeleton Driver. Cn-110559162-B, 29 September 2020. [Google Scholar]
- Nakashima, I. Walking Training Apparatus and State Determination Method. Ep-3238686-B1, 30 September 2020. [Google Scholar]
- Kim, J.-H.; Baek, Y.-S.; Son, B.-J. Shoe Module for Detecting Walking Phase, Method, Gait Analysis System and Active Walking Assist Device Using the Same. Kr-101648270-B1, 16 August 2016. [Google Scholar]
- Kim, D.-H.; Seo, G.-H.; Yoon, S.-H.; Seo, J.-H.; Heo, Y.-S. Muscle Rehabilation Training Method Using Walking-Assistive Robot. Kr-101556747-B1, 1 October 2015. [Google Scholar]
- Wang, X.; Qu, D.; Di, P.; Li, G.; Song, J.; Liu, S. Method for Controlling Man-Machine Interactive Motion of Lower Limb Exoskeleton Based on Joint Stress. Cn-111358667-B, 11 February 2022. [Google Scholar]
- Qin, T.; Jin, C.; Wu, K.; Wei, C.; Qiu, J.; Wen, J.; Meng, X. Pelvic Auxiliary Walking Rehabilitation Training Robot. Cn-110812130-B, 9 November 2021. [Google Scholar]
- Li, J.; Li, Y.; Liu, J.; Jiang, S.; Zhao, H.; Wang, X.; Liao, X. Auxiliary Standing Device and Auxiliary Standing Mechanism. Cn-110279562-B, 28 December 2021. [Google Scholar]
- Lee, H.D. Tendon Device for Suit Type Robot for Assisting Human with Physical Strength. U.S. Patent 10799381-B2, 13 October 2020. [Google Scholar]
- Wang, C.; Zhang, C.; Chen, B. Pneumatic Waist Assistance Exoskeleton Robot. Cn-110385692-B, 8 September 2020. [Google Scholar]
- Ansi, P.; Wu, X.; Wang, C.; Chen, C.; Feng, W. Exoskeleton Robot Line Winding Driving Hip Joint. Cn-106236518-B, 14 August 2018. [Google Scholar]
- Smith, J.A.; Bhugra, K. Method and System for Control and Operation of Motorized Orthotic Exoskeleton Joints. U.S. Patent 10278885-B1, 7 May 2019. [Google Scholar]
- Podschun, T. System and Method for the Regeneration of At Least One Severed Nerve Conduit. U.S. Patent 10905877-B2, 2 February 2021. [Google Scholar]
- Jeon, D.Y.; Hwang, B.S.; Jeon, J.H. Robot for Assistance Exoskeletal Power. Kr-101363850-B1, 18 February 2014. [Google Scholar]
- Liu, K.; Luo, X.; Ji, S.; Sun, Z.; Xu, H. Sit and Stand and Go Multi-Functional Motion Auxiliary Robot. Cn-108992259-B, 1 May 2020. [Google Scholar]
- Nam, B.; Park, K.T.; Son, J.K.; Yu, S.; Lee, W. Wearable Assistive Device Performing Protection Operation for Drive System. Ep-3539526-B1, 10 November 2021. [Google Scholar]
- Xia, N. A Kind of Exoskeleton Robot Follow-Up Control Device. Cn-105078708-B, 31 May 2017. [Google Scholar]
- Lim, B.; Park, Y.; Seo, K. Walking Assistance Method and Apparatuses. U.S. Patent 11109778-B2, 7 September 2021. [Google Scholar]
- Sandler, R.; Strausser, K.; Fiedler, M.; Amundso, K.; Brown, D.; Smith, R.; Sweeney, M.D.; Angold, R.; Mccaffrey, N.; Edmonds, D.; et al. Methods of Exoskeleton Communication and Control. U.S. Patent 10694948-B2, 30 June 2020. [Google Scholar]
- Laffranchi, M.; D’angella, S.; Uboldi, P.; Saglia, J.A.; Sanfilippo, C. Foot for a Robotic Exoskeleton for Assisted Walking of Persons Suffering from Locomotor Disorders. Ep-3322395-B1, 17 July 2019. [Google Scholar]
- Threlfall, J. External Structure Holder Device. Cn-105473116-B, 9 January 2018. [Google Scholar]
- Liao, W.-H.; Chen, B.; Qin, L.; Zhao, X.; Ma, H. Magneto-Rheological Series Elastic Actuator. U.S. Patent 10626944-B2, 21 April 2020. [Google Scholar]
- Yoon, J.W.; Pyo, S.H. A Knee-Orthosis to Assist the Gait by Support the Knee-Joint. Kr-101330343-B1, 15 November 2013. [Google Scholar]
- Qiu, J.; Deng, Q.; Yue, C.; Lin, X.; Zheng, X.; Chen, Y. A Kind of Plantar Pressure Measuring Device and Method for Ectoskeleton Control. Cn-105662419-B, 12 October 2018. [Google Scholar]
- Lerner, Z.F. Exoskeleton Device. U.S. Patent 11034016-B2, 15 June 2021. [Google Scholar]
- Lerner, Z.F. Exoskeleton Device. U.S. Patent 11090801-B2, 17 August 2021. [Google Scholar]
- Wang, J.; Zhang, X.; Xiao, D.; Dong, K.; Gu, J. Power-Source-Free Knee Joint Mechanism. Cn-111419652-B, 29 September 2020. [Google Scholar]
- Ming, D.; Jiang, S.; Wang, Z.; Xu, M.; Zhao, X.; Qi, H.; Zhou, P. A Kind of Ectoskeleton Walk Help System Driven with Functional Muscle Electric Stimulation. Cn-106377838-B, 5 April 2019. [Google Scholar]
- Hong, M.B.; Yoon, Y.H.; Kim, D.J. Robot for Lower Limb with Multi-Link Type Knee Joint and Method for Controlling the Same. Kr-101828256-B1, 13 February 2018. [Google Scholar]
- Wu, X.; Peng, A.; Wang, C.; Wang, Z.; Wu, G.; Liu, D.; Wu, C.; Liao, Y.; Liang, G. A Kind of Hip Joint Structure of Wearable Exoskeleton Robot. Cn-105877973-B, 21 September 2018. [Google Scholar]
- Liu, D.; Du, Y.; Cong, M.; Zhang, J.; Yang, J. Variable-Rigidity Lower Limb Exoskeleton Robot Based on Shape Memory Alloy. Cn-111823217-B, 4 January 2022. [Google Scholar]
- Wang, Z.; Yu, S.; Zhao, N.; Zhang, X.; Meng, D.; Zhang, K. Lower Limb Exoskeleton Inverse Motion Analysis Method Under Random Road Surface Condition. Cn-106548033-B, 19 May 2020. [Google Scholar]
- Fu, C.; Liu, J. A Kind of Light-Duty Ankle-Joint Ectoskeleton. Cn-106625605-B, 5 February 2019. [Google Scholar]
- Liu, Y.; Zhang, G.; Song, R.; Li, Y. Wearable Metatarsophalangeal Joint Walking Power Assisting Device. Cn-111671624-B, 27 August 2021. [Google Scholar]
- Zhang, L.; Wang, Z.; Cai, K.; Wang, W.; Huang, Q. Flexible Exoskeleton Robot Assisting Movement of Hip Joint and Knee Joint. Cn-108938340-B, 26 June 2020. [Google Scholar]
- Song, W.K.; Kwon, S.C.; Ko, B.W. Walking Pattern Training and Intension Analysis System Through Complex Stimulus, and Method Thereof. Kr-101911221-B1, 28 December 2018. [Google Scholar]
- Nam, B.; Park, K.T.; Son, J.K.; Yu, S.; Lee, W. Belt for Effective Wearing and Wearable Assistive Device Having the Same. U.S. Patent 10603786-B2, 31 March 2020. [Google Scholar]
- Ivanov, A.V.; Tolstov, K.M.; Kostenko, A.A.; Kuznetsov, A.S.; Komarov, P.A. Femal Link of an Active Foot Orthosis. Ru-171262-U1, 25 May 2017. [Google Scholar]
- Park, H.S.; Kim, C.J. Gait Rehabilitation Apparatus. Kr-102130886-B1, 6 July 2020. [Google Scholar]
- Shi, J.; Wang, Y.; Huang, H.; Zhao, W. The Walking Trigger Control Method of Convalescence Device Based on Foot Pressure Sensor. Cn-105342808-B, 15 May 2018. [Google Scholar]
- Han, C.S.; Lee, S.; Choi, Y.S.; Soonwoong, H.; Kim, B.; Hwang, S.H. Walking Assistance Apparatus and Operation Method of the Same. Kr-101981402-B1, 28 August 2019. [Google Scholar]
- Yamamoto, K.; Toshiyuki, K. Joint Motion Assist Device. Jp-6105091-B2, 29 March 2017. [Google Scholar]
- Daba, H. Walking Training Apparatus and Method of Controlling the Same. Ep-3360529-B1, 23 September 2020. [Google Scholar]
- Chen, L.; Song, X.; Ma, S.; Wang, J. Control Method of Lower Limb Exoskeleton Robot. Cn-109276415-B, 22 December 2020. [Google Scholar]
- Dong, W.; Chen, C.; Du, Z.; Mao, W. Sole Human-Computer Interaction Measuring Device Based on Multi-Source Information Fusion. Cn-109222984-B, 6 July 2021. [Google Scholar]
- Handrail Type Intelligent Tumble Protection Walking Aid Rehabilitation Robot. Cn-109157381-B, 4 August 2020.
- Wang, C.; Liao, Y.; Wu, X.; Peng, A.; Wu, C.; Zhang, S.; Hu, X.; Li, C. Support Member and the Self-Adapting Seat Device with the Support Member. Cn-105342811-B, 31 October 2017. [Google Scholar]
- Jin, H.; Yang, S.; Jin, L.; Mei, L.; Hu, R. Lower Limb Power Assisting Device. Cn-110192966-B, 8 February 2022. [Google Scholar]
- Han, C.S.; Lee, S.; Choi, Y.S.; Soonwoong, H.; Kim, B.; Hwang, S.H. Walking Assistance Apparatus and Operation Method of the Same. Kr-101981403-B1, 28 August 2019. [Google Scholar]
- Shi, J.; Wang, Y.; Zhao, W.; Yang, N.; She, H. A Kind of Convalescence Device Speed of Travel Control Method Rocked Based on Trunk. Cn-105287164-B, 5 January 2018. [Google Scholar]
- Lin, X.; Deng, Q.; Yin, Z.; Qiu, J.; Chen, Y.; Zhou, C. A Kind of Adaptive Ectoskeleton Knee Joint Support Plate Unlocked. Cn-106074094-B, 15 June 2018. [Google Scholar]
- He, J.; Luo, Z.; Liao, Y. Standing Mode Control Method of Exoskeleton Mechanical Leg Rehabilitation System. Cn-106726357-B, 22 September 2020. [Google Scholar]
- Chen, L.; Li, S.; Zhang, Y.; Zhang, C. Electromyographic Signal Collection Position Choosing Method Based on Complex Network. Cn-105769186-B, 29 May 2018. [Google Scholar]
- Liang, W. The Bionical Dynamic Knee Joint System in the Wearable List Source of One Kind and Its Control Method. Cn-108175639-B, 30 August 2019. [Google Scholar]
- Little, R.; Shishbaradaran, J.D. Exoskeleton and Mounting Arrangement. Ep-3501473-B1, 25 November 2020. [Google Scholar]
- Borisoff, J.; Dougall, R.; Janzen, E.; Mattie, J. Active Arm Passive Leg Exercise Machine with Guided Leg Movement. U.S. Patent 11083924-B2, 10 August 2021. [Google Scholar]
- Arzanpour, S.; Wook, P.J.; Page, L.; Bazhanov, N.; Dehghani, H. Self-Supported Device for Guiding Motions of a Target Joint. Ca-3098479-C, 8 June 2021. [Google Scholar]
- Li, T.; Li, M. A Kind of Wearable Leg Power Brace of Self-Regulation. Cn-105997438-B, 12 February 2019. [Google Scholar]
- Ji, L.; Ma, Q. A Wheeled Drive Self-Balancing Power Ectoskeleton of Sole for Spinal Cord Injury Patient. Cn-107174488-B, 20 March 2020. [Google Scholar]
- Nam, B.; Park, K.T.; Son, J.K.; Yu, S.; Lee, W. Controlling Position of Wearable Assistive Device Depending on Operation Mode. Ep-3539527-B1, 17 November 2021. [Google Scholar]
- Nigamadyanov, N.R.; Lukyanov, V.I.; Ivanova, G.I.; Tsykunov, M.B. Modular Orthopedic Apparatus. Ru-2659132-C1, 28 June 2018. [Google Scholar]
- Nasiri, R.; Ahmadabadi, M.N.; Ahmadi, A. Methods and Systems for an Exoskeleton to Reduce a Runners Metabolic Rate. U.S. Patent 10549138-B2, 4 February 2020. [Google Scholar]
- Shuai, M. Telescopic Structure and Exoskeleton Robot with Same. Cn-109431752-B, 2 February 2021. [Google Scholar]
- Dalley, S.; Farris, R.; Murray, S. Advanced Gait Control System and Methods Enabling Continuous Walking Motion of a Powered Exoskeleton Device Parker-Hannifin Corporation. Ep-3750166-B1, 5 January 2022. [Google Scholar]
- Van Den Bogert, A.J.; Miller, D.; Doris, R.; Moody, R.; Grimes, D., Jr. Exoskeleton System. U.S. Patent 11191694-B2, 7 December 2021. [Google Scholar]
- Lee, S.R.; Kang, O.H.; Yun, J.H.; Yi, H. Reaction Force Adjusting Device of Exoskeleton System and Variable Stiffness Actuator Using the Same. Kr-102067127-B1, 16 January 2020. [Google Scholar]
- Dalley, S.A.; Farris, R.; Etheridge, S.; Morrison, S.; Murray, S. Safety Monitoring and Control System and Methods for a Legged Mobility Exoskeleton Device. U.S. Patent 11077556-B2, 3 August 2021. [Google Scholar]
- Hong, M.B.; Kim, D.J.; Lee, S.H.; Seo, C.H.; Wang, J.H. Elastic Type Sole Assembly in Wearable Robot Absorbing Impact and Detecting Ground Reaction Force. Kr-101619297-B1, 10 May 2016. [Google Scholar]
- Yamamoto, K.; Ishii, M. Foot Mounting Structure of Joint Motion Assist Device. Jp-5930354-B2, 8 June 2016. [Google Scholar]
- Sulzer, J.; Shin, S.Y. Adaptable Robotic Gait Trainer. U.S. Patent 11135119-B2, 5 October 2021. [Google Scholar]
- Lee, S.R.; Kang, O.H.; Yun, J.H.; Yi, H. Reaction Force Adjusting Device and Method Using Variable Stiffness Actuator of Exoskeleton System. Kr-102067124-B1, 16 January 2020. [Google Scholar]
- Mahoney, R.; Gadway, C.; Hogue, M.E.; Kernbaum, N.I.; Lear, M.C.; Stolee-Smith, H.; Tayson-Frederick, M.L.; Toh, R.; Vincent, R.; Weber, T.; et al. Exosuit Systems and Methods. U.S. Patent 11192237-B2, 7 December 2021. [Google Scholar]
- Dai, Y.; Deng, C.; Tang, K.; Tang, P. A Kind of Ectoskeleton Stopping Means. Cn-105856195-B, 30 January 2018. [Google Scholar]
- Lugris, A.U.; Cuadrado, A.J.; Font, L.J.M.; Clos, C.D.; Alonso, S.F.J.; Romero, S.F. System to Assist Walking. Es-2663899-B2, 11 September 2018. [Google Scholar]
- Quan, L.; Ge, L.; Liu, B.; Zhang, X.; Wang, B.; Li, Z. Electro-Hydraulic Hybrid Driving Exoskeleton Device. Cn-108670731-B, 07 April 2020. [Google Scholar]
- Wu, H.; Sun, J.; Pan, W.; Liu, X.; Tian, J. Pneumatic Weight-Reducing Walking Power-Assisted Robot. Cn-109124999-B, 16 June 2020. [Google Scholar]
- Stefan, F.; Gussen, U.; Petri, F. Mobility System. De-102016215399-B3, 5 October 2017. [Google Scholar]
- Lee, J.W.; Kim, H.Y. Gait Assist Robot for Rehabilitation Training with Lift Device. Kr-102334851-B1, 3 December 2021. [Google Scholar]
- Lee, J.C.; Bae, Y.H. Robot Device for Upper and Lower Extremity Rehabilitation. Kr-102305924-B1, 30 September 2021. [Google Scholar]
- Sheng, Y.; Huang, H.; Feng, L.; Chen, Z.; Qian, Y. Device and Method for Realizing Cooperative Motion of Weight-Reducing Vehicle and Lower Limb Robot Through Communication. Cn-110916970-B, 21 September 2021. [Google Scholar]
- Li, B.; Hu, C.; Huang, Q.; Zhou, Y.; Zhang, Y. Counter Weight Type Lower Limb Rehabilitation Robot. Cn-110613587-B, 16 November 2021. [Google Scholar]
- Li, Z.; Li, D.; Xu, H. Lower Limb Exoskeleton Robot with Overload Slipping Function. Cn-109998860-B, 8 October 2021. [Google Scholar]
- Sheng, Y.; Huang, H.; Feng, L.; Chen, Z.; Qian, Y. Device and Method for Assisting Lower Limb Robot to Transfer Gravity Center by Aid of Weight Reduction Vehicle. Cn-110946742-B, 19 November 2021. [Google Scholar]
- Pei, Z.; Pei, P.; Gu, H.; Liu, H.; Tang, Z. Anti-Falling Walking Aid Vehicle for Lower Limb Rehabilitation Training and Rehabilitation Training Method. Cn-110353952-B, 21 July 2020. [Google Scholar]
- Lee, J.W.; Kim, H.Y. Patient Weight Burden Reduction Device of Walking Rehabilitation Training Robot. Kr-102317401-B1, 26 October 2021. [Google Scholar]
- Wang, J.; Wang, T.; Xiao, D.; Gu, J.; Li, C. Exoskeleton Joint Self-Locking Mechanism, Knee Joint and Bionic Rehabilitation Robot. Cn-111920651-B, 5 February 2021. [Google Scholar]
- Dong, W.; Du, Z.; Chen, C.; Mao, W. Lower Limb Exoskeleton Ankle Joint Based on Telecentric Mechanis. Cn-109528440-B, 2 March 2021. [Google Scholar]
- Kweon, H.D.; Ha, K.S.; Park, J.S.; Jeung, H.I. Lower Extremity Exoskeleton Robotic Device. Kr-102292983-B1, 24 August 2021. [Google Scholar]
- Wang, X.; Cheng, W.; Du, F. Lower Limb Exoskeleton Capable of Being Used for Both Wheel and Leg. Cn-110393656-B, 11 May 2021. [Google Scholar]
- Huang, J.; Huo, J.; Zhang, M.; Xiong, C.; Xiao, X. Auxiliary Dual-Purpose Outer Limb Robot for Human Body Movement. Cn-110292510-B, 8 September 2020. [Google Scholar]
- Youngwoo, K. Rehabilitation Walking Method Considering Patient’s Rom Characteristics and System Thereof. Kr-102020129-B1, 9 September 2019. [Google Scholar]
- Geffard, F.; Ponsort, D. Lower Limbs of the Exoskeleton with Low Power Consumption. Jp-6845378-B2, 17 March 2021. [Google Scholar]
- Wu, X.; He, Y.; Liu, J.; Li, J.; Ma, Y.; Li, F.; Sun, J.; Dong, Y.; Lian, P. Novel Self-Balancing Ectoskeleton Robot. Cn-113181009-B, 1 February 2022. [Google Scholar]
- Yoon, J.W.; Sabaapour, M.; Lee, H.S. Rehabilitation Robot. Kr-102081911-B1, 26 February 2020. [Google Scholar]
- Kwon, S.C.; Kim, K.H. Leg Opening Joint of Walking Exoskeleton and Walking Exoskeleton Comprising the Same. Kr-102037316-B1, 15 November 2019. [Google Scholar]
- Liu, J.; Wu, X.; He, Y.; Li, J.; Li, F.; Ma, Y.; Cao, W.; Wang, D.; Sun, J.; Lian, P. Motion Decoupling Parallel Driving Type Exoskeleton Robot Ankle Joint. Cn-113183176-B, 25 January 2022. [Google Scholar]
- Wang, J.; Wang, T.; Xiao, D.; Li, C.; Gu, J. Locking-Free Hip Adjusting Device. Cn-112245239-B, 9 April 2021. [Google Scholar]
- Zhang, W.; Su, Y.; Xiao, B.; Shao, Y.; Ding, X. Constant-Force Human Body Suspension System for Rehabilitation Training. Cn-110507516-B, 29 September 2020. [Google Scholar]
- Zhang, J.; Hu, K.; Zhu, Y.; Shen, L.; Yang, J.; Xiong, L.; Li, J. Control Method of Hydraulic System of Knee Joint Rehabilitation Robot. Cn-107669447-B, 21 July 2020. [Google Scholar]
- Gao, W. Walking-Aid Boots. Cn-107661193-B, 7 April 2020. [Google Scholar]
- Park, S.S.; Jung, S.H.; Park, K.T. Walking Assistance System. Kr-102352537-B1, 17 January 2022. [Google Scholar]
- Seo, K.H.; Han, J.B.; Lee, J.I.; Yang, K.M.; Sin, H.S.; Lee, S.J.; Sohn, D.S. Wearable Suit Control Method. Kr-102288425-B1, 10 August 2021. [Google Scholar]
- Zhu, H.; Zhang, B.; Qiu, P. Power-Assisted Exoskeleton Control Method, Power-Assisted Exoskeleton Control System and Computer Equipment. Cn-112809651-B, 29 October 2021. [Google Scholar]
- Liu, D.; Du, Y.; Cong, M.; Zhang, J.; Yang, J. Variable-Rigidity Knee Joint Exoskeleton Robot Based on Shape Memory Alloy. Cn-111823218-B, 14 January 2022. [Google Scholar]
- Hong, M.-B.; Yoon, Y.-H. Motion Assist Apparatus. Kr-102156837-B1, 16 September 2020. [Google Scholar]
- Andrey Valerievich Borisov, A.V.; Borisova, V.L.; Konchina, L.V.; Kulikova, M.G.; Maslova, K.S. Exoskeleton. Ru-2760527-C1, 26 November 2021. [Google Scholar]
- Ryong, L.S.; Young, L.C.; Hyun, K.O.; Hwan, K.I. Two-Leg Walking Assistant System for Boarding Type. Kr-101497673-B1, 3 March 2015. [Google Scholar]
- Polygerinos, P.; Sridar, S.; Maruyama, T.; St. Clair, C.; Kwasnica, C. Soft Inflatable Exosuit for Knee Rehabilitation. U.S. Patent 11259980-B2, 1 March 2022. [Google Scholar]
- Ho, S.K.; Boo, H.J.; Il, L.J.; Mo, Y.K.; Seob, S.H.; Jae, L.S.; Seop, S.D. Walk Assistance and Fall Prevention Wearable Suit. Kr-102370567-B1, 7 March 2022. [Google Scholar]
- Hwan, K.K.; Hun, C.K. Size-Adjustable Pelvis Unit and Wearable Walking Robot Comprising the Same. Kr-101765547-B1, 9 August 2017. [Google Scholar]
- Jiongming, S.; Bicong, Z.; Jiali, B.; Jiayin, H.; Mengqi, A.; Ganggang, Z. A Kind of Human Foot’s Bionic Exoskeleton System. Cn-106344344-B, 28 August 2018. [Google Scholar]
- Ryong, L.S.; Hyun, K.O.; Hwan, Y.J.; Hak, Y. Apparatus and Method for Observing Feedback Force of Wearable Exoskeleton System. Kr-102002635-B1, 1 October 2019. [Google Scholar]
- Takashi, I.; Kenichiro, F.; Takeo, N. Measurement System, Measurement Method, and Program. Jp-6879301-B2, 2 June 2021. [Google Scholar]
- Larose, P.; Denninger, M.; Looking, B.J.-P.; Plante, J.-S.; Veronno, C.; Grenir, J. Devices Designed to Be Positioned Near Joints and Systems Incorporating Such Devices. Kr-102336585-B1, 9 December 2021. [Google Scholar]
- Unluhisarcikli, O. Lower Extremity Exoskeleton for Gait Retraining. U.S. Patent 20160151176, 2 June 2016. [Google Scholar]
- Unluhisarcikli, O. Lower Extremity Exoskeleton for Gait Retraining. Wo/2013/049658, 4 April 2013. [Google Scholar]
- Lee, C.-S. Pneumatic Lower Extremity Gait Rehabilitation Training System. U.S. Patent 20180071580, 15 March 2018. [Google Scholar]
- Zoss, A. Powered Orthotic System for Cooperative Overground Rehabilitation Ekso Bionics. Wo/2014/159857, 2 October 2014. [Google Scholar]
- Mudgal, G. Robotic Exoskeleton Assisted (Locomotion) Rehabilitation System “Rears”Bionic Yantra Private LimitedMudgal. In-201741045051, 1 February 2019. [Google Scholar]
- Belforte, G. Active Sling for the Motion Neurological Rehabilitation of Lower Limbs, System Comprising Such Sling and Process for Operating Such System. Wo/2013/136351, 19 September 2013. [Google Scholar]
- Belforte, G. Active Orthosis for the Motion Neurological Rehabilitation of Lower Limbs, System Comprising Such Orthosis and Process for Operating Such System. Ep-2825146, 21 January 2015. [Google Scholar]
- Amundson, K. Interface for Adjusting the Motion of a Powered Orthotic Device Through Externally Applied ForcesEkso Bionics. Wo/2014/113456, 24 July 2014. [Google Scholar]
- Amundson, K. Interface for Adjusting the Motion of a Powered Orthotic Device Through Externally Applied Forces. Ep-2945590, 25 November 2015. [Google Scholar]
- Zoss, A. Powered Orthotic System for Cooperative Overground Rehabilitation. Ep-2968052, 20 January 2016. [Google Scholar]
- De Rossi, S.M.M. Assistive Flexible Suits, Flexible Suit Systems, and Methods for Making and Control Thereof to Assist Human Mobility. Ep-3079581, 19 October 2016. [Google Scholar]
- Tong, K.-Y. Interactive Exoskeleton Robotic Knee System. Wo/2016/180074, 17 November 2016. [Google Scholar]
- Aguirre-Ollinger, G. Admittance Shaping Controller for Exoskeleton Assistance of the Lower Extremities. U.S. Patent 20180098907, 12 April 2018. [Google Scholar]
- De Rossi, S.M.M. Assistive Flexible Suits, Flexible Suit Systems, and Methods for Making and Control Thereof to Assist Human Mobility. U.S. Patent 20170202724, 20 July 2017. [Google Scholar]
- Ortlieb, A.L. Bio-Inspired Adaptive Impedance Based Controller for Human-Robot Interaction and Method. Wo/2020/039409, 27 February 2020. [Google Scholar]
- Kaustubh, K. Apparatus and System for Limb Rehabilitation. U.S. Patent 20190183715, 20 June 2019. [Google Scholar]
- Aguirre-Ollinger, G. Admittance Shaping Controller for Exoskeleton Assistance of the Lower Extremities. U.S. Patent 20160045385, 18 February 2016. [Google Scholar]
- Ortlieb, A.L. Modular and Minimally Constraining Lower Limb Exoskeleton for Enhanced Mobility and Balance Augmentation. U.S. Patent 20190254908, 22 August 2019. [Google Scholar]
- Ortlieb, A.L. Modular and Minimally Constraining Lower Limb Exoskeleton for Enhanced Mobility and Balance Augmentation. Wo/2018/065913, 12 April 2018. [Google Scholar]
- Walsh, C. Soft Exosuit for Assistance with Human Motion. Ep-3003231, 13 April 2016. [Google Scholar]
- Walsh, C. Soft Exosuit for Assistance with Human Motion. Ep-3777677, 17 February 2021. [Google Scholar]
- Zoss, A. Methods of Enhancing the or Training Rehabilitation of an Exoskeleton Wearer. U.S. Patent 20180078442, 22 March 2018. [Google Scholar]
- Kapure, K. Apparatus and System for Limb Rehabitation. Bionic Yantra Private Limited Kapure. Wo/2019/116093, 20 June 2019. [Google Scholar]
- Vouga, T. Bio-Inspired Standing Balance Controller for a Full-Mobilization Exoskeleton. U.S. Patent 20210015694, 21 January 2021. [Google Scholar]
- Swartz, A. Methods for Improved User Mobility and Treatment. Roam Robotics. Wo/2021/243056, 2 December 2021. [Google Scholar]
- Tong, K.-Y. Exoskeleton Ankle Robot. Wo/2016/180073, 17 November 2016. [Google Scholar]
- Swartz, A. Powered Medical Device and Methods for Improved User Mobility and Treatment Roam Robotics. U.S. Patent 20210370495, 2 December 2021. [Google Scholar]
- Zoss, A. Methods of Enhancing the Rehabilitation or Training of an Exoskeleton Wearer. Wo/2016/077442, 19 May 2016. [Google Scholar]
- Reiner, R. Soft Wearable Muscle Assisting Device. Ep-3701927, 2 September 2020. [Google Scholar]
- Zoss, A. Exoskeleton. Ep-3217942, 20 September 2017. [Google Scholar]
- Reiner, R. Soft Wearable Muscle Assisting Device. Wo/2018/122106, 5 July 2018. [Google Scholar]
- Agrawal, S.K. Human Movement Research, Therapeutic, and Diagnostic Devices, Methods, and Systems. U.S. Patent 20170027803, 2 February 2017. [Google Scholar]
- Kapure, K. Robotic Management System for Limb Rehabilitation. U.S. Patent 20200170876, 4 June 2020. [Google Scholar]
- Amundson, K. Interface for Adjusting the Motion of a Powered Orthotic Device Through Externally Applied Forces. U.S. Patent 20150351991, 10 December 2015. [Google Scholar]
- Caban, M. Control System for Movement Reconstruction And/or Restoration for a Patient. U.S. Patent 20200147382, 14 May 2020. [Google Scholar]
- Stuart, R. Data Logging and Third-Party Administration of a Mobile Robot Roam. U.S. Patent 20210369542, 2 December 2021. [Google Scholar]
- Von Zitzewitz, J. Apparatus Comprising a Support System for a User and Its Operation in a Gravity Assist Mode. U.S. Patent 20210283001, 16 September 2021. [Google Scholar]
- De Sapio, V. Integrated Platform to Monitor and Analyze Individual Progress in Physical and Cognitive Tasks. U.S. Patent 10532000, 14 January 2020. [Google Scholar]
- Asbeck, A.T. Soft Exosuit for Assistance with Human Motion. Ep-2895133, 22 July 2015. [Google Scholar]
- Goldfarb, M. Movement Assistance Device. Ep-2861198, 22 April 2015. [Google Scholar]
- Goldfarb, M. Movement Assistance Device. Wo/2013/188868, 19 December 2013. [Google Scholar]
- Reese, M. Exoskeleton and Master. U.S. Patent 20190232485, 1 August 2019. [Google Scholar]
- García, A.E. Exoskeleton for Assisting Human Movement. Ep-3225363, 4 October 2017. [Google Scholar]
- Stuart, R. Data Logging and Third-Party Administration of a Mobile Robot Roam Robotics. Wo/2021/242991, 2 December 2021. [Google Scholar]
- Zoss, A. Reconfigurable Exoskeleton. U.S. Patent 20150351995, 10 December 2015. [Google Scholar]
- Bulea, T. Powered Gait Assistance Systems. U.S. Patent 20210298984, 30 September 2021. [Google Scholar]
- Courtine, G. Apparatus and Method for Restoring Voluntary Control of Locomotion in Neuromotor Impairments. Ca-2874101, 5 December 2013. [Google Scholar]
- Courtine, G. Apparatus and Method for Restoring Voluntary Control of Locomotion in Neuromotor Impairments. Au-2013269175, 11 December 2014. [Google Scholar]
- Courtine, G. Apparatus and Method for Restoring Voluntary Control of Locomotion in Neuromotor Impairments. Wo/2013/179230, 5 December 2013. [Google Scholar]
- Courtine, G. Apparatus for Restoring Voluntary Control of Locomotion in Neuromotor Impairments. Ep-2854939, 8 April 2015. [Google Scholar]
- Zoss, A. Reconfigurable Exoskeleton. Ep-2931204, 21 October 2015. [Google Scholar]
- Sandler, R. Methods of Communication Exoskeleton and Control. Wo/2016/168463, 20 October 2016. [Google Scholar]
- Thomas, A.A. Soft Exosuit for Assistance with Human Motion. Ep-3791834, 17 March 2021. [Google Scholar]
- Walsh, C. Soft Exosuit for Assistance with Human Motion. U.S. Patent 20150173993, 25 June 2015. [Google Scholar]
- Courtine, G. Apparatus for Restoring Voluntary Control of Locomotion in Neuromotor Impairments. Ep-3241586, 8 November 2017. [Google Scholar]
- Asbeck, A.T. Soft Exosuit for Assistance with Human Motion. U.S. Patent 20150321339, 12 November 2015. [Google Scholar]
- Wang, B. Power-Assist with Adjustable Lower Limb Exoskeleton Robot Stiffness Joints. U.S. Patent 20200337934, 29 October 2020. [Google Scholar]
- Dalley, S. Mobility Assistance Devices with Automated Assessment and Adjustment Control. Wo/2018/175004, 27 September 2018. [Google Scholar]
- Walsh, C. Soft Exosuit for Assistance with Human Motion. U.S. Patent 20160220438, 4 August 2016. [Google Scholar]
- Tong, K.-Y. Exoskeleton Ankle Robot. U.S. Patent 20160331557, 17 November 2016. [Google Scholar]
- Dalley, S. Mobility Assistance Devices with Automated Assessment and Adjustment Control. U.S. Patent 20200060921, 27 February 2020. [Google Scholar]
- Roy, A. Method and Apparatus for Providing Economical, Portable Deficit-Adjusted Adaptive Assistance During Movement Phases of an Impaired Ankle. Wo/2016/209770, 29 December 2016. [Google Scholar]
- Contreras-Vidal, J.-L. Customizable Orthotic/Prosthetic Braces and Lightweight Modular Exoskeleton. Wo/2017/218661, 21 December 2017. [Google Scholar]
- Walsh, C. Soft Exosuit for Assistance with Human Motion. U.S. Patent 20210039248, 11 February 2021. [Google Scholar]
- Bulea, T.C. Powered Gait Assistance Systems. Wo/2018/023109, 1 February 2018. [Google Scholar]
- Contreras-Vidal, J.-L. Customizable Orthotic/Prosthetic Braces and Lightweight Modular Exoskeleton. U.S. Patent 20190328604, 31 October 2019. [Google Scholar]
- Roy, A. Method and Apparatus for Providing Economical Portable Deficit Adjusted Adaptive Assistance during Movement Phases of an Impaired Ankle. In-201717044844, 16 March 2018. [Google Scholar]
- Casler, R.J., Jr. Hybrid Terrain- Adaptive Lower-Extremity Systems. U.S. Patent 20190209348, 11 July 2019. [Google Scholar]
- Herr, H.M. Robotic System for Simulating a Wearable Device and Method of Use. U.S. Patent 20130158444, 20 June 2013. [Google Scholar]
- Herr, H.M. Kinetic Sensing, Signal Generation, Feature Extraction, and Pattern Recognition for Control of Autonomous Wearable Leg Devices. U.S. Patent 20190307583, 10 October 2019. [Google Scholar]
- Lerner, Z.F. Open-Loop Control for Exoskeleton Motor. U.S. Patent 20210291355, 23 September 2021. [Google Scholar]
- Foucault, A. Kinoped Lower Extremity Performance Improvement, Injury Prevention, and Rehabilitation System. Wo/2021/046482, 11 March 2021. [Google Scholar]
- Legaz, J.G. System for Assisting Walking. Ep-3378446, 26 September 2018. [Google Scholar]
- Sandler, R. Methods of Communication Exoskeleton and Control. Ca-2982778, 20 October 2016. [Google Scholar]
- Goldfarb, M. Movement Assistance Device. U.S. Patent 20150142130, 21 May 2015. [Google Scholar]
- Miller Herr, H.M. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 20140081424, 20 March 2014. [Google Scholar]
- Tong, K.-Y. Interactive Exoskeleton Robotic Knee System. U.S. Patent 20160331560, 17 November 2016. [Google Scholar]
- Herr, M.H. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 20160296348, 13 October 2016. [Google Scholar]
- Herr, M.H. Implementing a Stand-Up Sequence Using a Lower-Extremity Prosthesis or Orthosis. U.S. Patent 20140081420, 20 March 2014. [Google Scholar]
- Herr, M.H. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 20190117415, 25 April 2019. [Google Scholar]
- Von Zitzewitz, J. Apparatus Comprising a Support System for a User and Its Operation in a Gravityassist Mode. Wo/2018/033591, 22 February 2018. [Google Scholar]
- Witte, K.A. Exoskeleton Device and Control System. U.S. Patent 20180125738, 10 May 2018. [Google Scholar]
- Dalley, S.A. Cloud-Based Control System and Method Enabling Interactive Clinical Care Using a Powered Mobility Assistance Device. U.S. Patent 20210386611, 16 December 2021. [Google Scholar]
- Herr, H.M. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 20160235557, 18 August 2016. [Google Scholar]
- Sandler, R. Methods of Communication Exoskeleton and Control. U.S. Patent 20180092536, 5 April 2018. [Google Scholar]
- Witte, K.A. Exoskeleton Device and Control System. U.S. Patent 20210369537, 2 December 2021. [Google Scholar]
- Casler, R.J., Jr. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 20170086991, 30 March 2017. [Google Scholar]
- Walsh, C.J. Soft Exosuit for Assistance with Human Motion. U.S. Patent 20160107309, 21 April 2016. [Google Scholar]
- Walsh, C.J. Systems, Methods, and Devices for Assisting Walking for Developmentally-Delayed Toddlers. U.S. Patent 20160346156, 1 December 2016. [Google Scholar]
- Method and Apparatus for Providing Economical, Portable Deficit-Adjusted Adaptive Assistance During Movement Phases of an Impaired Ankle. Ca-2989421, 29 December 2016.
- Zhang, J. Torque Control Methods for an Exoskeleton Device. U.S. Patent 20170340506, 30 November 2017. [Google Scholar]
- Johnson, C.L. Patient Aid Devices, Particularly for Mobile Upper Extremity Support in Railed Devices Such as Parallel Bars and Treadmills. U.S. Patent 20180043202, 15 February 2018. [Google Scholar]
- Lonner, J.H. Autonomous Mobile Support System for the Robotic Mobility-Impaired Ambulatus Robotics. Wo/2021/086471, 6 May 2021. [Google Scholar]
- Ji, Y.K. Wearable Robot and Control Method Thereof. U.S. Patent 20150196403, 16 July 2015. [Google Scholar]
- Johnson, C.L. Patient Aid Devices, Particularly for Mobile Upper Extremity Support in Railed Devices Such as Parallel Bars and Treadmills. U.S. Patent 20150335940, 26 November 2015. [Google Scholar]
- Bujanda, I.G. Wearable Devices for Protecting Against Musculoskeletal Injuries and Enhancing Performance. Wo/2019/161232, 22 August 2019. [Google Scholar]
- Mahoney, R. Exosuit Systems and Methods Seismic. Wo/2019/108655, 6 June 2019. [Google Scholar]
- Mahoney, R. Exosuit Systems and Methods Seismic. U.S. Patent 20190160651, 30 May 2019. [Google Scholar]
- Trutz, P. System and Method for the Regeneration of At Least One Severed Nerve Conduit. U.S. Patent 20180326210, 15 November 2018. [Google Scholar]
- Mahoney, R. Exosuit Load Bearing Distribution Systems. U.S. Patent 20190160652, 30 May 2019. [Google Scholar]
- Markus, T. Orthosis Leg and Orthosis. U.S. Patent 20170156963, 8 June 2017. [Google Scholar]
- Scattareggia, M.S. Esoskeleton Equipped with Electro-or Magneto—Rheological Fluid Type Semi-Active Joints. Ep-3562443, 6 November 2019. [Google Scholar]
- Scattareggia, M.S. Esoskeleton Equipped with Electro-or Magneto—Rheological Fluid Type Semiactive Joints. Wo/2018/122886, 5 July 2018. [Google Scholar]
- Easton, J.L.C. Low Profile Exoskeleton. U.S. Patent 20160128890, 12 May 2016. [Google Scholar]
- Varghese, R.J. System for Movement Control. Wo/2020/234184, 26 November 2020. [Google Scholar]
- Zoss, A. Powered Orthotic System for Cooperative Overground Rehabilitation. Ep-2968052 B1, 11 August 2021. [Google Scholar]
- Goldfarb, M. Movement Assistance Device. U.S. Patent 10792210 B2, 6 October 2020. [Google Scholar]
- Herr, H.M. Hybrid Terrain-Adaptive Lower-Extremity Systems. U.S. Patent 10575971 B2, 3 March 2020. [Google Scholar]
- García, L.J. System for Assisting Walking. Ep-3378446 B1, 4 November 2020. [Google Scholar]
- Herr, H.M. Optimal Design of a Lower Limb Exoskeleton or Orthosis. U.S. Patent 10561563 B2, 18 February 2020. [Google Scholar]
- Tuttemann, M. Leg Orthosis and Orthosis. U.S. Patent 11179288 B2, 23 November 2021. [Google Scholar]
- Walsh, C.J. Soft Exosuit for Assistance with Human Motion. U.S. Patent 10843332 B2, 24 November 2020. [Google Scholar]
- Huang, C.-M. Portable Human Exoskeleton System. U.S. Patent 10918558 B2, 16 February 2021. [Google Scholar]
- Herr, H. Motorized Limb Assistance Device. U.S. Patent 10695256 B2, 30 June 2020. [Google Scholar]
- Smith, F.M. Legged Robotic Device Utilizing Modifiable Linkage Mechanism. U.S. Patent 10766133 B2, 8 September 2020. [Google Scholar]
- Scattareggia, M.S. Esoskeleton Equipped with Electro-or Magneto—Rheological Fluid Type Semi-Active Joints. Ep-3562443 B1, 7 April 2021. [Google Scholar]
- Edgerton, V.R. Regulation of Autonomic Control of Bladder Voiding After a Complete Spinal Cord Injury. U.S. Patent 10751533 B2, 25 August 2020. [Google Scholar]
- Goldfarb, M. Movement Assistance Device. Ep-2861198 B1, 8 January 2020. [Google Scholar]
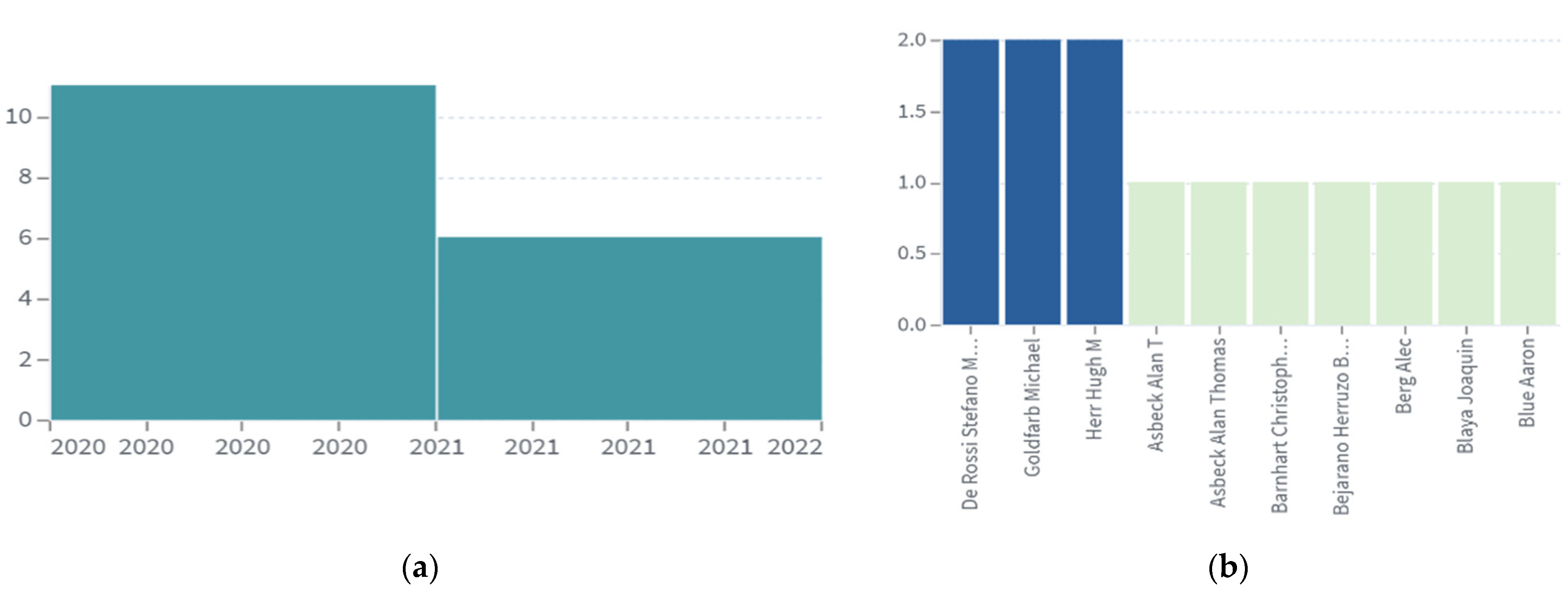

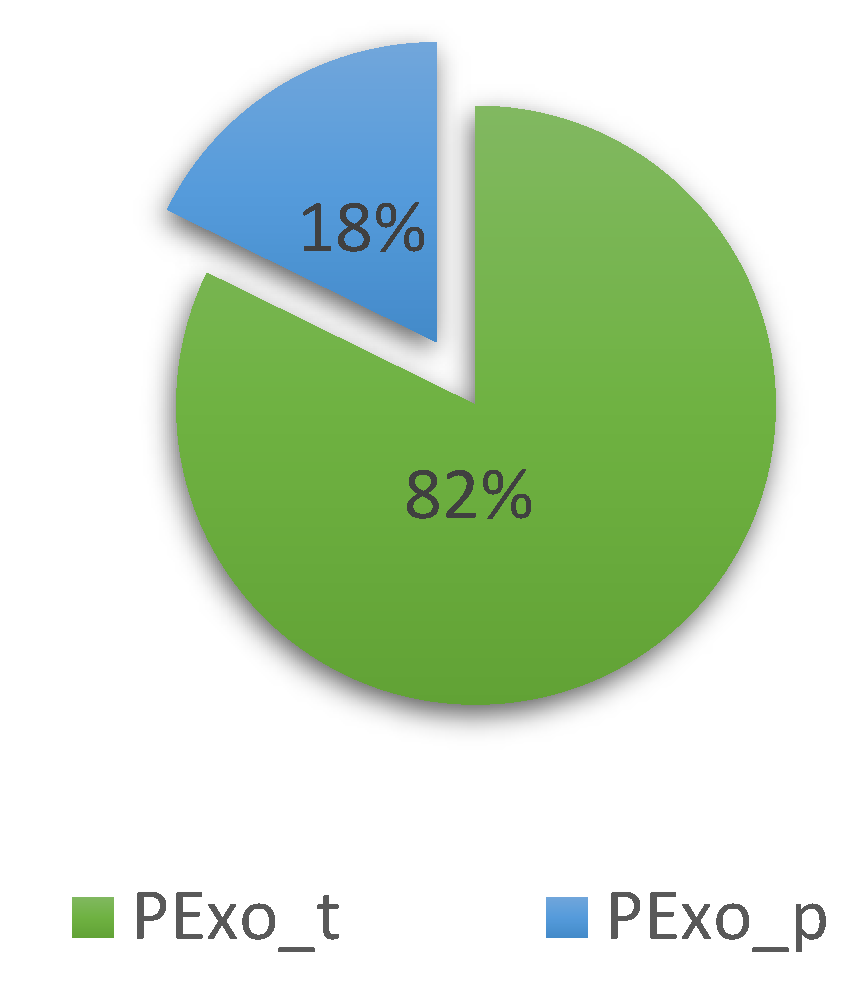

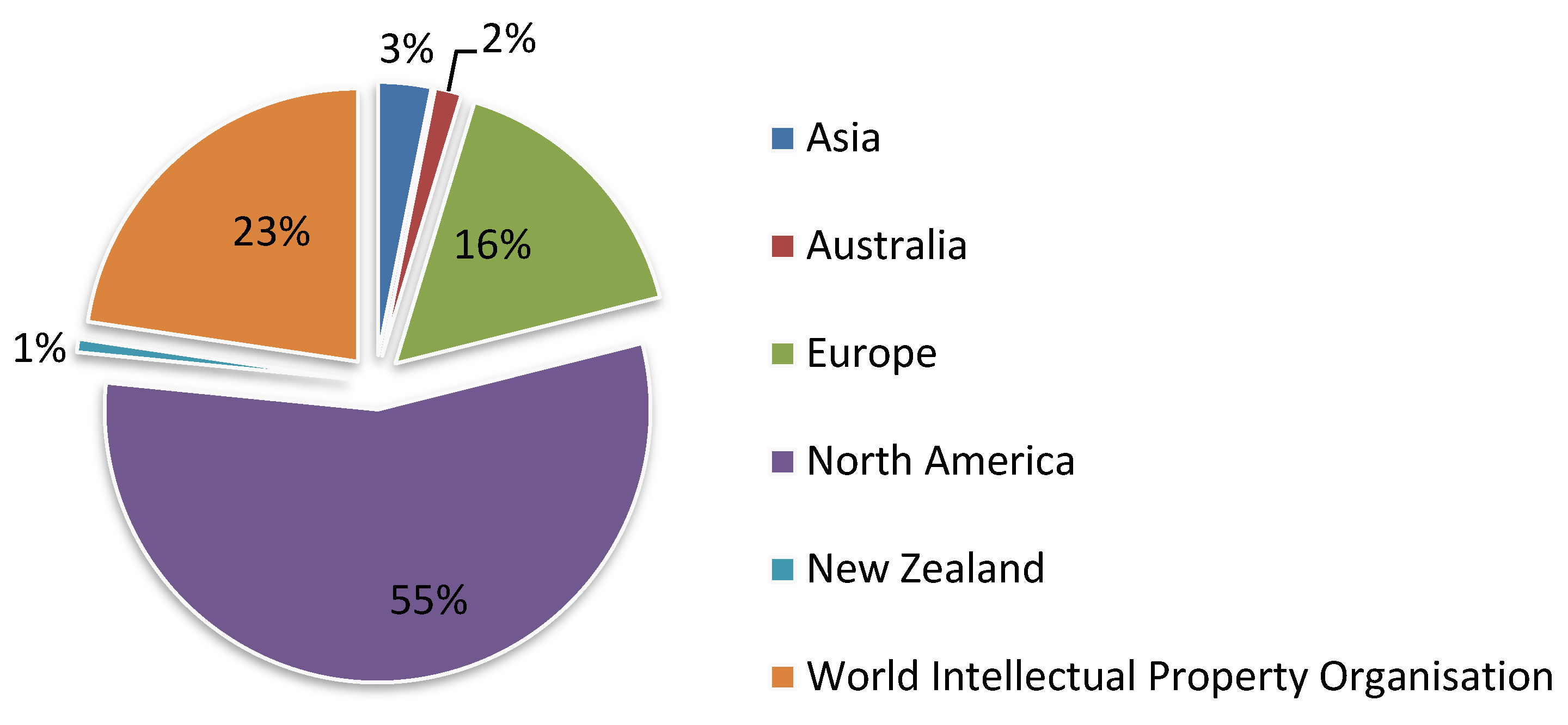
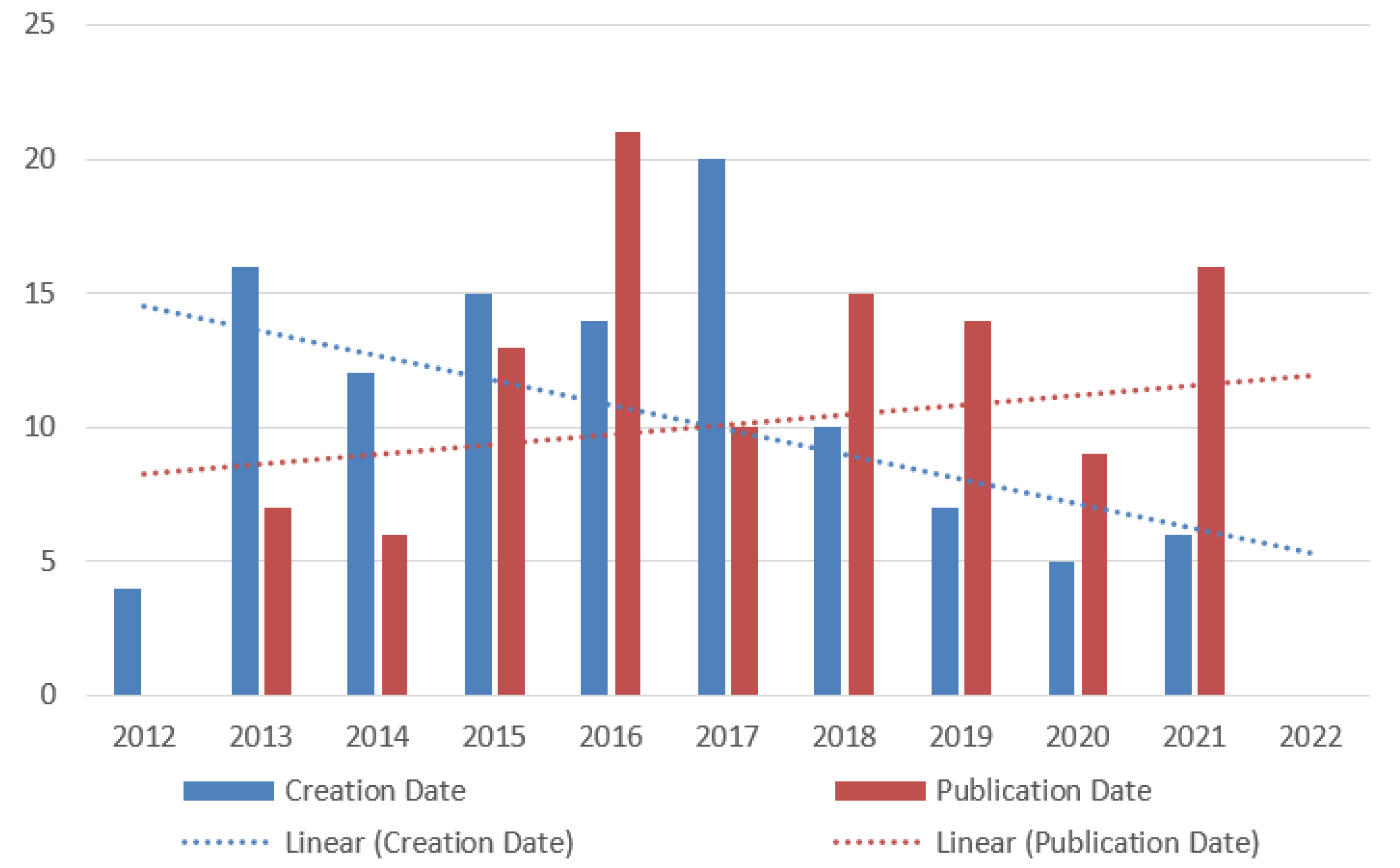
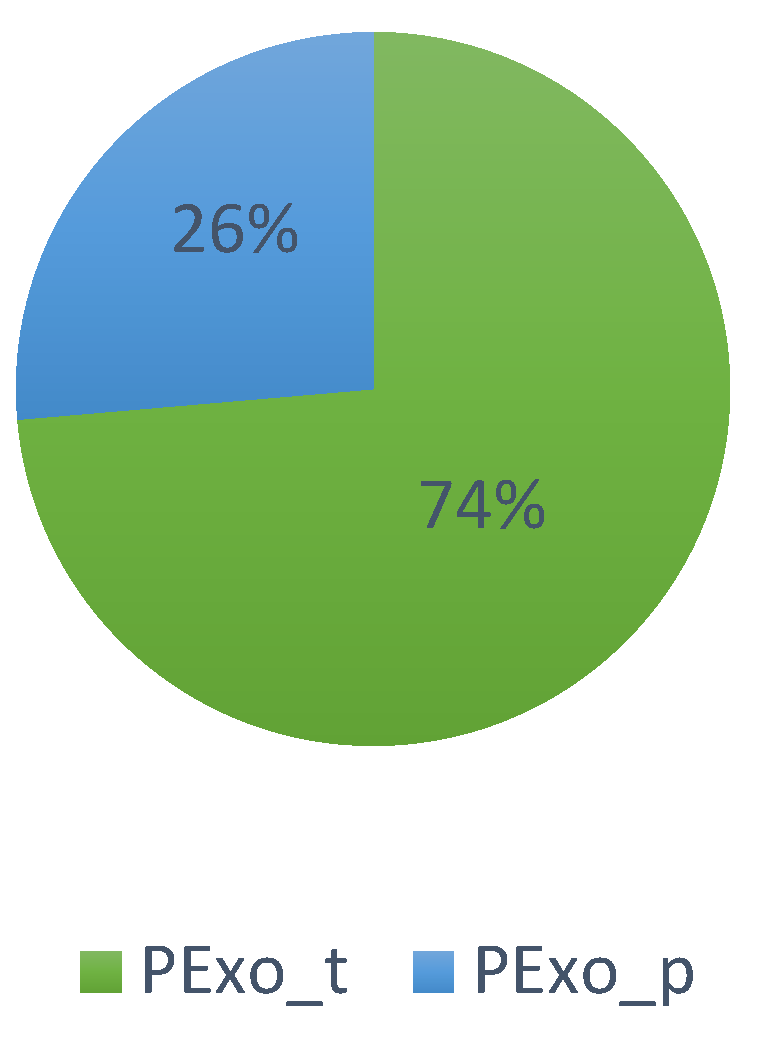



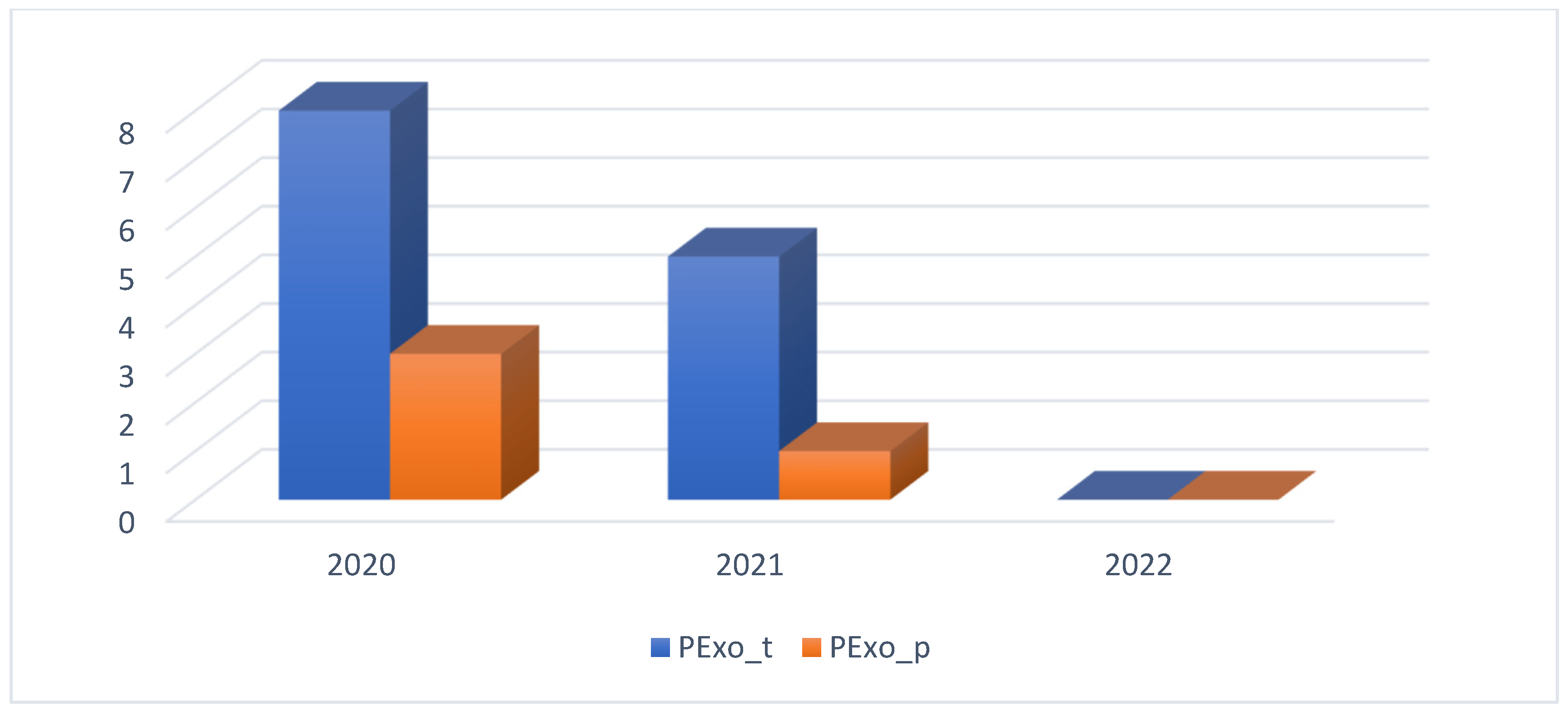
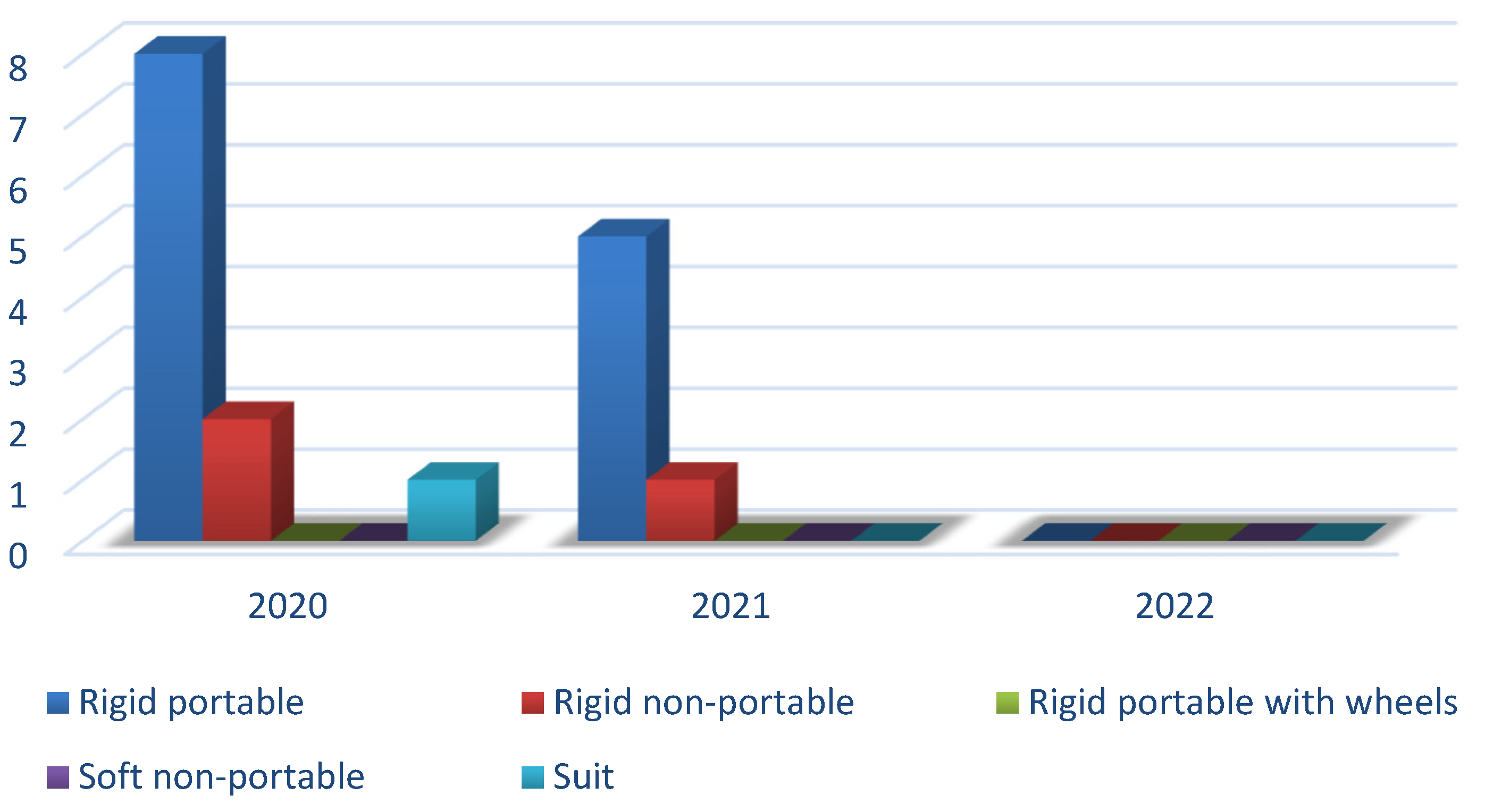
| Regions | Number of Application Patents |
| Europe | 27 |
| Asia | 197 |
| SUA+Canada | 57 |
| Total | 281 |
| Country Code | Number of Application Patents |
|---|---|
| CA | 3 |
| CN | 129 |
| DE | 1 |
| ES | 16 |
| EP | 10 |
| JP | 13 |
| KR | 50 |
| RU | 4 |
| TW | 1 |
| US | 54 |
| Year | Application Date | Publication Date |
|---|---|---|
| 2005 | 1 | 0 |
| 2006 | 1 | 0 |
| 2007 | 1 | 0 |
| 2008 | 2 | 0 |
| 2009 | 9 | 0 |
| 2010 | 2 | 0 |
| 2011 | 2 | 0 |
| 2012 | 6 | 3 |
| 2013 | 17 | 5 |
| 2014 | 16 | 10 |
| 2015 | 23 | 9 |
| 2016 | 59 | 9 |
| 2017 | 42 | 22 |
| 2018 | 51 | 40 |
| 2019 | 34 | 48 |
| 2020 | 12 | 65 |
| 2021 | 4 | 58 |
| 2022 | 0 | 13 |
| Application Date | The Time Elapsed between the Application and Publication of the Patent | Number of PExo_t | Number of PExo_p | |
|---|---|---|---|---|
| Minimum Period | Maximum Period | |||
| 2012 | 1 year | 5 years | 5 | 1 |
| 2013 | 1 year | 7 years | 15 | 2 |
| 2014 | 1 year | 7 years | 11 | 5 |
| 2015 | 2 years | 7 years | 20 | 3 |
| 2016 | 1 year | 5 years | 50 | 9 |
| 2017 | 1 year | 5 years | 32 | 10 |
| 2018 | 1 year | 4 years | 41 | 8 |
| 2019 | 1 year | 3 years | 29 | 4 |
| 2020 | 4 months | 2 years | 9 | 5 |
| 2021 | 7 months | 1 year | 4 | 1 |
| Year | PExo_c.t | PExo_c.p |
|---|---|---|
| 2012 | 3 | 0 |
| 2013 | 2 | 3 |
| 2014 | 9 | 1 |
| 2015 | 9 | 0 |
| 2016 | 5 | 4 |
| 2017 | 19 | 2 |
| 2018 | 34 | 6 |
| 2019 | 37 | 10 |
| 2020 | 55 | 11 |
| 2021 | 48 | 11 |
| 2022 | 11 | 2 |
| Year | Application Date | Publication Date |
|---|---|---|
| 2000 | 3 | 0 |
| 2001 | 0 | 2 |
| 2002 | 0 | 0 |
| 2003 | 1 | 1 |
| 2004 | 0 | 1 |
| 2005 | 1 | 0 |
| 2006 | 2 | 3 |
| 2007 | 0 | 0 |
| 2008 | 6 | 3 |
| 2009 | 4 | 1 |
| 2010 | 0 | 3 |
| 2011 | 0 | 2 |
| 2012 | 4 | 1 |
| 2013 | 16 | 7 |
| 2014 | 12 | 6 |
| 2015 | 15 | 13 |
| 2016 | 14 | 21 |
| 2017 | 20 | 10 |
| 2018 | 10 | 15 |
| 2019 | 7 | 14 |
| 2020 | 5 | 9 |
| 2021 | 6 | 16 |
| 2022 | 0 | 0 |
| Application Date | The Time Elapsed between the Application and Publication of the Patent | Number of PExo_t | Number of PExo_p | |
|---|---|---|---|---|
| Minimum Period | Maximum Period | |||
| 2012 | 1 year | 2 years | 4 | 0 |
| 2013 | 7 months | 8 years | 15 | 1 |
| 2014 | 7 months | 7 years | 12 | 0 |
| 2015 | 8 months | 3 years | 9 | 5 |
| 2016 | 6 months | 5 years | 7 | 8 |
| 2017 | 6 months | 4 years | 11 | 9 |
| 2018 | 4 months | 2 years | 9 | 1 |
| 2019 | 6 months | 2 years | 6 | 1 |
| 2020 | 6 months | 1 year | 3 | 2 |
| 2021 | 7 months | 10 months | 5 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pană, C.F.; Rădulescu, V.M.; Pătrașcu-Pană, D.M.; Petcu, F.L.; Reșceanu, I.C.; Cismaru, Ș.I.; Trășculescu, A.; Bîzdoacă, N. The Impact of COVID on Lower-Limb Exoskeleton Robotic System Patents—A Review. Appl. Sci. 2022, 12, 5393. https://doi.org/10.3390/app12115393
Pană CF, Rădulescu VM, Pătrașcu-Pană DM, Petcu FL, Reșceanu IC, Cismaru ȘI, Trășculescu A, Bîzdoacă N. The Impact of COVID on Lower-Limb Exoskeleton Robotic System Patents—A Review. Applied Sciences. 2022; 12(11):5393. https://doi.org/10.3390/app12115393
Chicago/Turabian StylePană, Cristina Floriana, Virginia Maria Rădulescu, Daniela Maria Pătrașcu-Pană, Florina Luminița Petcu (Besnea), Ionuț Cristian Reșceanu, Ștefan Irinel Cismaru, Andrei Trășculescu, and Nicu Bîzdoacă. 2022. "The Impact of COVID on Lower-Limb Exoskeleton Robotic System Patents—A Review" Applied Sciences 12, no. 11: 5393. https://doi.org/10.3390/app12115393