
On the Communication Performance of Airborne Distributed Coherent Radar


Abstract
:1. Introduction
- Radars with different frequency bands, power, polarization, and antenna patterns can be combined systematically to detect targets from multiple angles and in various ways. Meanwhile, coherent detection can also be realized. These advantages can improve the detection probability of the target [6].
- When a small number of radars are subject to inevitable electronic attack or failure, other radars can quickly form an effective detection network, which greatly improves the anti-jamming ability of the radar network [7].
- Compared with ground-based radar, ADCR is usually smaller, more flexible, and easier to deploy [8].
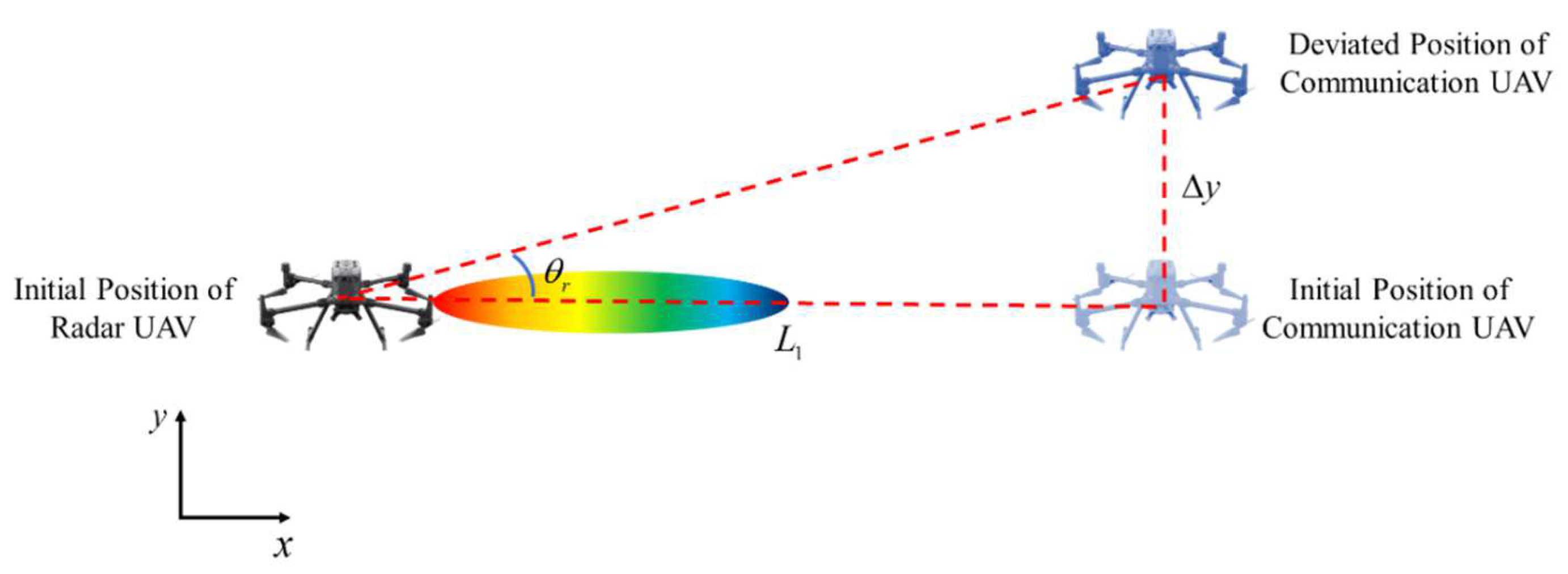
- UAV position fluctuation: Ground-based radar is usually fixed, while ADCR is usually affected by forces such as wind, with its position fluctuating [10]. Taking the communication between UAVs as an example, communication usually depends on the directional antenna, and the mainlobe of the transmitting antenna should point to the connecting direction between the transmitter and the receiver by default. However, the fluctuation of the transmitter or the receiver will cause the receiver to deviate from the mainlobe of the transmitter, which will further cause the antenna gain of the communication link to decline and affect the communication performance.
- Limited load of UAV: Unlike high-power ground-based radar, the load of ADCR is usually very limited [11,12]. This mainly includes the energy carried by UAVs and their limited size. Limited energy leads to limited transmitting power and motion capability of UAVs, which will lead to limited communication coverage and motion range. Limited size often leads to performance limitations related to size and area. For example, fewer antenna elements will lead to wider mainlobe width. The limited size may also affect the performance of some precision components, such as the stability of the transmitter’s power amplifier [12,13,14].
- Nature of wireless channel propagation: Since ADCR cannot rely on wired communication in the same way as ground-based radar, shadow fading, multi-path fading, and propagation loss will affect communication performance [15].
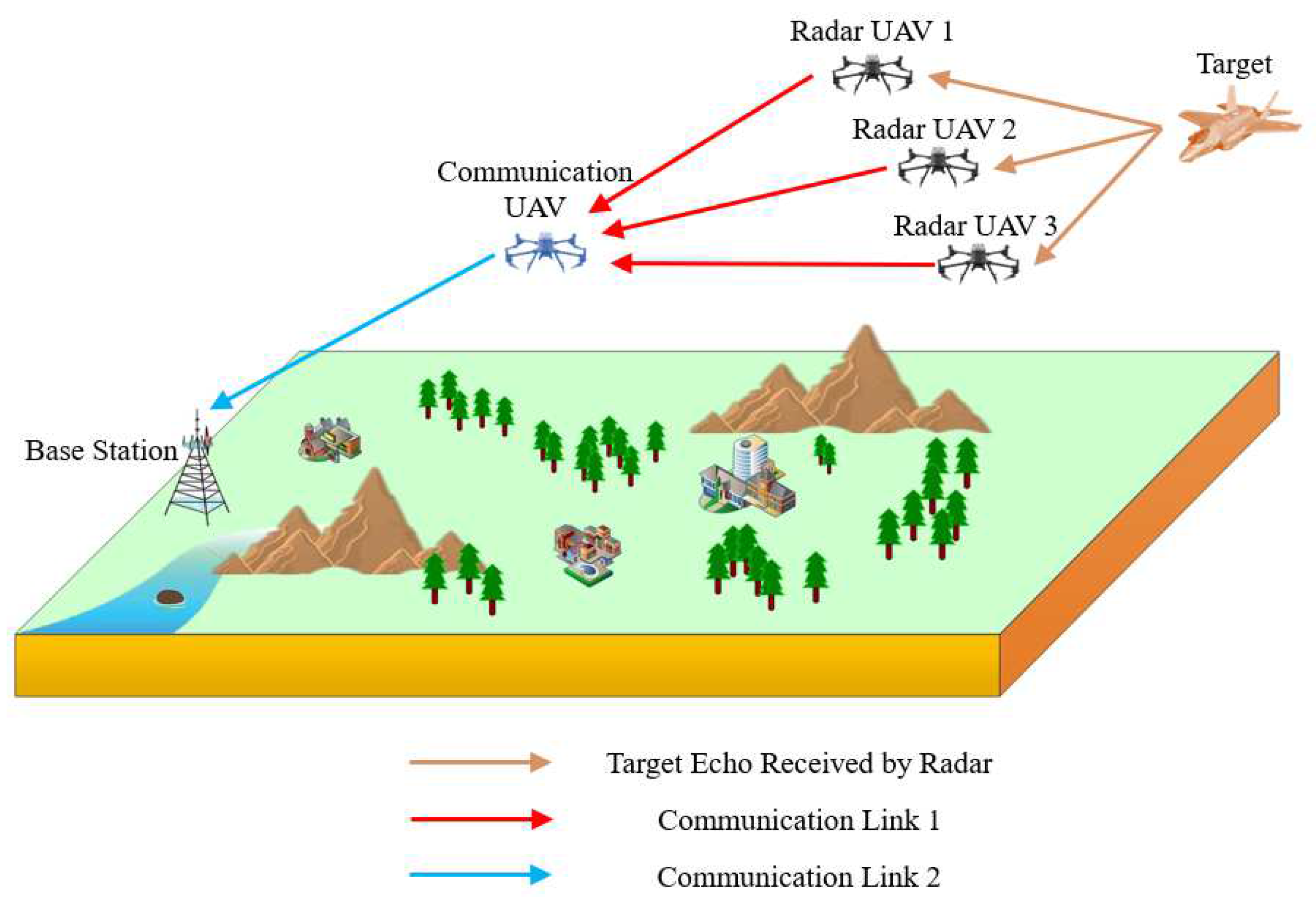
- At present, there is still little research into communication performance analysis for ADCR. Since the target detection by ADCR is usually coherent, and the data acquired by radar UAVs needs to be sent (possibly through relay) to the ground information fusion center for processing. In this case, if the clocks between UAVs can keep strict synchronization, the communication signals transmitted by each radar UAV can be directly summed at the communication UAV. Therefore, the topology of ADCR is usually complex. Thus, the above existing research and conclusions are not directly applied. This will be explained carefully in the modeling of Section 2.
- A channel model suitable for ADCR communication systems under coherent conditions is constructed. Compared with the existing research on communication performance analysis, our proposed model features two innovations: First, the load of radar UAV and communication UAV is limited, which leads to the performance error of their power amplifiers. We use the model based on noncentral chi-squared distribution to express their transmission power error, and cascade it with other random variables in the scenario, such as multi-path fading, antenna pointing error, etc., which makes up for the shortcomings of the existing work. Second, considering the coherent detection of target by radar UAV, the communication signal can also be directly accumulated at the communication UAV. This performance analysis mode of radar-communication cooperative optimization is rarely seen in the existing research.
- By approximating the Rician distribution and the noncentral chi-squared distribution, the analytic expression of OP at the ground base station is derived. Noncentral chi-squared distribution and Rician distribution are usually expressed in the form of modified Bessel function, which is not conducive to cascading with random variables such as multi-path fading. Therefore, we use an approximate expression to represent noncentral chi-squared distribution and Rician distribution respectively.
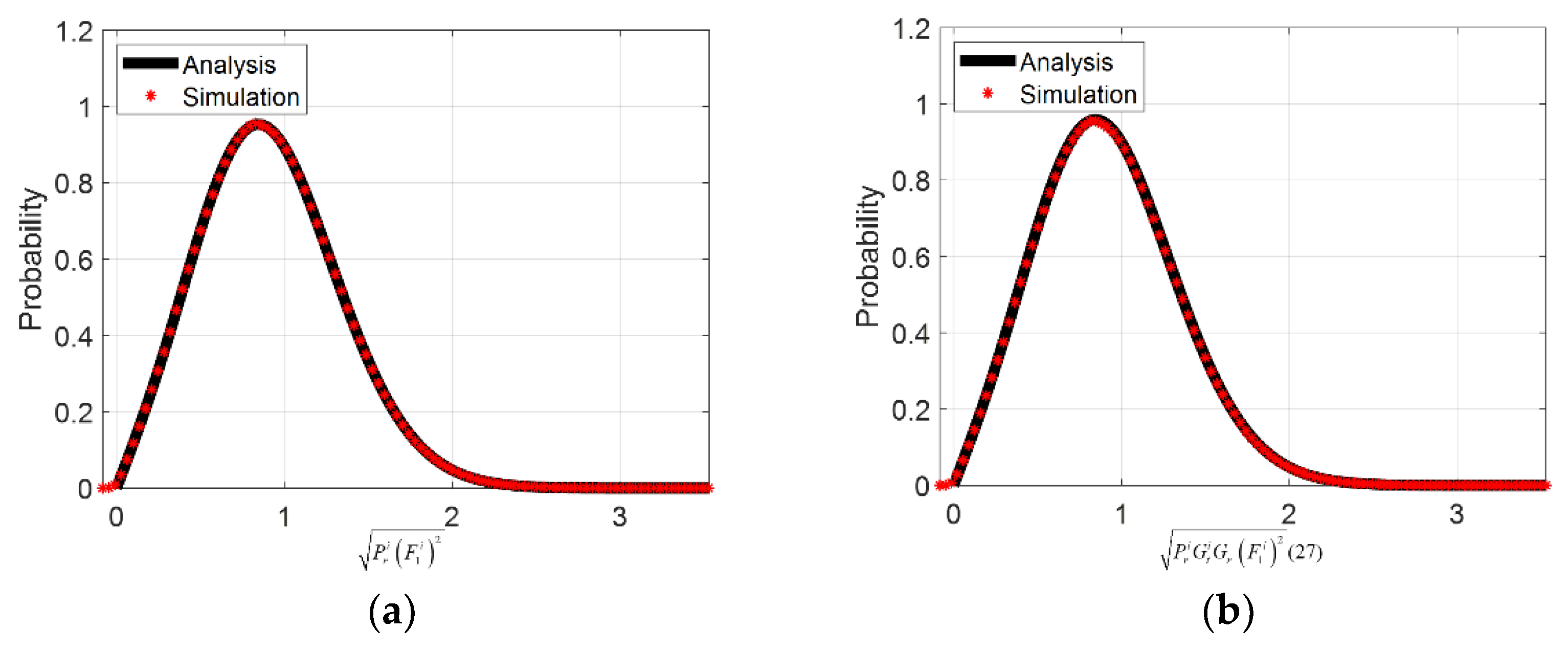
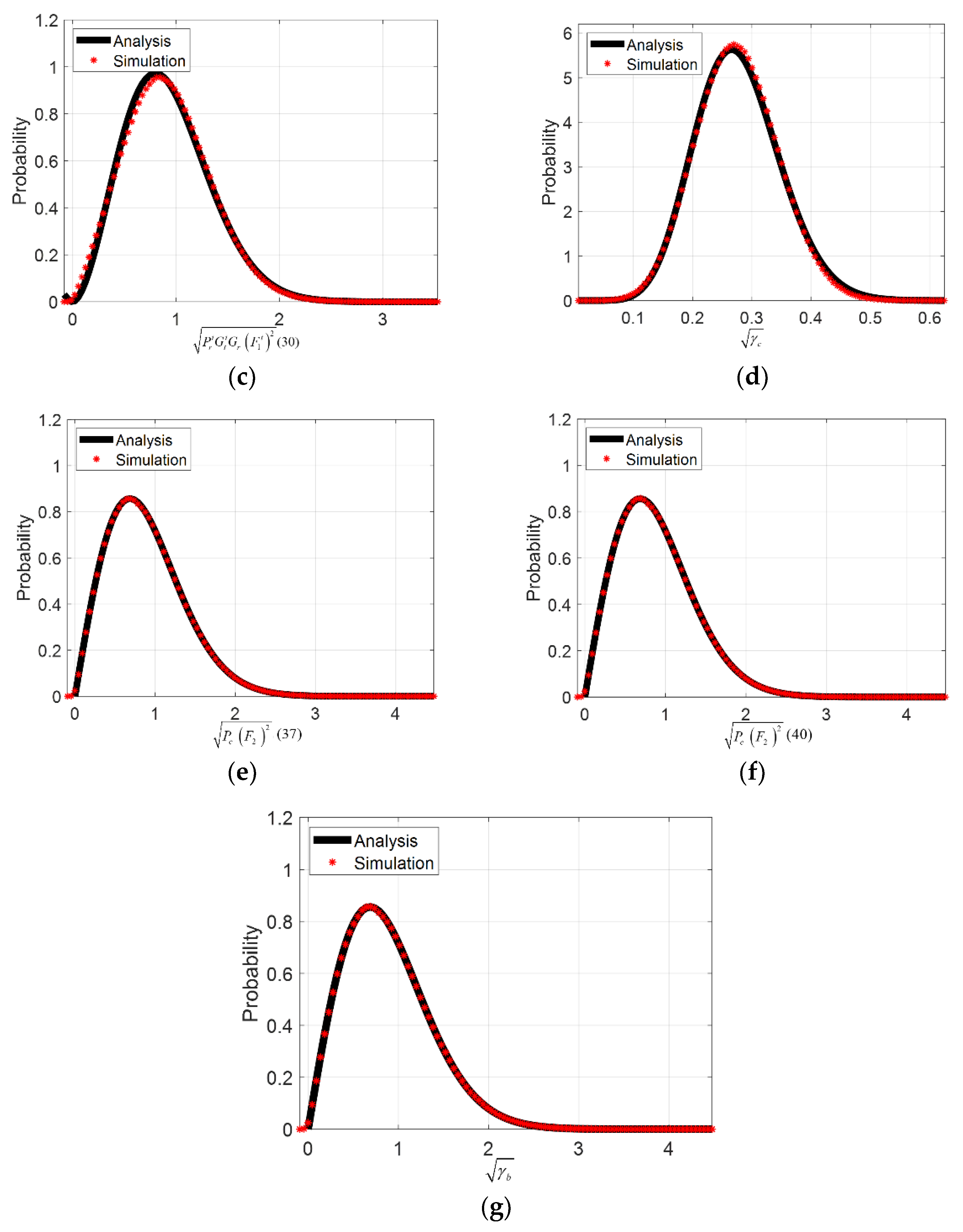
- The rationality of the proposed closed-form expression is verified by numerical simulation.
2. Materials and Methods
2.1. System Model
2.1.1. The Overall Topology of the ADCR Communication System
2.1.2. Statistical Model of and
2.1.3. Statistical Model of and
2.1.4. Statistical Model of and
2.2. Performance Analysis
2.2.1. The PDF of
2.2.2. The PDF of
2.2.3. The OP of the Whole Communication System
3. Results and Discussion
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Pan, Y.; Zhang, J.; Luo, G.Q.; Yuan, B. Evaluating radar performance under complex electromagnetic environment using supervised machine learning methods: A case study. In Proceedings of the 2018 8th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 15–17 June 2018; pp. 206–210. [Google Scholar]
- Potapov, A.A. Waves in large disordered fractal systems: Radar, nanosystems, and clusters of unmanned aerial vehicles and small-size spacecrafts. J. Commun. Technol. Electron. 2018, 63, 980–997. [Google Scholar] [CrossRef]
- Nenashev, V.; Sentsov, A.; Shepeta, A. Formation of radar image the earth’s surface in the front zone review two-position systems airborne radar. In Proceedings of the 2019 Wave Electronics and its Application in Information and Telecommunication Systems (WECONF), Saint-Petersburg, Russia, 3–7 June 2019; pp. 1–5. [Google Scholar]
- Khan, M.B.; Hussain, A.; Anjum, U.; Ali, C.B.; Yang, X. Adaptive doppler compensation for mitigating range dependence in forward-looking airborne radar. Electronics 2020, 9, 1896. [Google Scholar] [CrossRef]
- Lu, X.; Xu, Z.; Ren, H.; Yi, W. LPI-based resource allocation strategy for target tracking in the moving airborne radar network. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York City, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar]
- Duk, V.; Wojaczek, P.; Rosenberg, L.; Cristallini, D.; O’Hagan, D.W. Airborne passive radar detection for the APART-GAS trial. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Liu, Z.-A.; Lu, J.-G.; Dong, Z.; Jie, Y.-H. Research on anti-point source jamming method of airborne radar based on artificial intelligence. In International Conference on Advanced Hybrid Information Processing; Springer: Cham, Switzerland, 2021; pp. 154–164. [Google Scholar] [CrossRef]
- Brandfass, M.; Dallinger, A.; Weidmann, K. Modular, scalable multifunction airborne radar systems for high performance ISR applications. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–10. [Google Scholar]
- Wang, J.; Liang, X.-D.; Chen, L.-Y.; Wang, L.-N.; Li, K.; Sensing, R. First demonstration of joint wireless communication and high-resolution SAR imaging using airborne MIMO radar system. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6619–6632. [Google Scholar] [CrossRef]
- Najafi, M.; Ajam, H.; Jamali, V.; Diamantoulakis, P.D.; Karagiannidis, G.K.; Schober, R. Statistical modeling of the FSO fronthaul channel for UAV-based communications. IEEE Trans. Commun. 2020, 68, 3720–3736. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S. Research on emergency coverage capability of fixed-wing UAV based on 5G. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 680–684. [Google Scholar]
- Aissa, S.B.; Letaifa, A.B.; Sahli, A.; Rachedi, A. Computing offloading and load balancing within UAV clusters. In Proceedings of the 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2022; pp. 497–498. [Google Scholar]
- Malandrakis, K.; Dixon, R.; Savvaris, A.; Tsourdos, A. Design and development of a novel spherical UAV. IFAC-PapersOnLine 2016, 49, 320–325. [Google Scholar] [CrossRef]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y. Characterization of rice paddies by a UAV-mounted miniature hyperspectral sensor system. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 851–860. [Google Scholar] [CrossRef]
- Cui, Z.; Briso-Rodriguez, C.; Guan, K.; Calvo-Ramirez, C.; Ai, B.; Zhong, Z. Measurement-based modeling and analysis of UAV air-ground channels at 1 and 4 GHz. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1804–1808. [Google Scholar] [CrossRef]
- Guan, Z.; Kulkarni, T. On the effects of mobility uncertainties on wireless communications between flying drones in the mmWave/THz bands. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April—2 May 2019; pp. 768–773. [Google Scholar]
- Zhong, W.; Xu, L.; Liu, X.; Zhu, Q.; Zhou, J. Adaptive beam design for UAV network with uniform plane array. Phys. Commun. 2019, 34, 58–65. [Google Scholar] [CrossRef]
- Fouda, A.; Ibrahim, A.S.; Guvenc, I.; Ghosh, M. Interference management in UAV-assisted integrated access and backhaul cellular networks. IEEE Access 2019, 7, 104553–104566. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Safi, H.; Parsaeefard, S.; Saad, W. Analytical channel models for millimeter wave UAV networks under hovering fluctuations. IEEE Trans. Wirel. Commun. 2020, 19, 2868–2883. [Google Scholar] [CrossRef] [Green Version]
- Dabiri, M.T.; Rezaee, M.; Yazdanian, V.; Maham, B.; Saad, W.; Hong, C.S. 3D channel characterization and performance analysis of UAV-assisted millimeter wave links. IEEE Trans. Wirel. Commun. 2020, 20, 110–125. [Google Scholar] [CrossRef]
- Yang, L.; Chen, J.; Hasna, M.O.; Yang, H.-C. Outage performance of UAV-assisted relaying systems with rf energy harvesting. IEEE Commun. Lett. 2018, 22, 2471–2474. [Google Scholar] [CrossRef]
- Yang, L.; Meng, F.; Zhang, J.; Hasna, M.O.; Di Renzo, M. On the performance of RIS-assisted dual-hop UAV communication systems. IEEE Trans. Veh. Technol. 2020, 69, 10385–10390. [Google Scholar] [CrossRef]
- Chen, X.; Hu, X.; Zhu, Q.; Zhong, W.; Chen, B. Channel modeling and performance analysis for UAV relay systems. China Commun. 2018, 15, 89–97. [Google Scholar]
- Ji, B.; Li, Y.; Zhou, B.; Li, C.; Song, K.; Wen, H. Performance analysis of UAV relay assisted iot communication network enhanced with energy harvesting. IEEE Access 2019, 7, 38738–38747. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D.; Bakuła, M. Improvement of UAV positioning performance based on EGNOS+SDCM solution. Remote Sens. 2021, 13, 2597. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zheng, G. Effect of user mobility and channel fading on the outage performance of UAV communications. IEEE Wirel. Commun. Lett. 2019, 9, 367–370. [Google Scholar] [CrossRef]
- You, C.; Zhang, R. 3D trajectory optimization in Rician fading for UAV-enabled data harvesting. IEEE Trans. Wirel. Commun. 2019, 18, 3192–3207. [Google Scholar] [CrossRef] [Green Version]
- András, S.; Baricz, Á. Properties of the probability density function of the non-central chi-squared distribution. J. Math. Anal. Appl. 2008, 346, 395–402. [Google Scholar] [CrossRef] [Green Version]
- Dabiri, M.T.; Sadough, S.M.S.; Ansari, I.S. Tractable optical channel modeling between UAVs. IEEE Trans. Veh. Technol. 2019, 68, 11543–11550. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Khalighi, M.A. Channel modeling and parameter optimization for hovering UAV-based free-space optical links. IEEE J. Sel. Areas Commun. 2018, 36, 2104–2113. [Google Scholar] [CrossRef] [Green Version]
- Kaadan, A.; Refai, H.H.; Lopresti, P.G. Multielement FSO transceivers alignment for inter-UAV communications. J. Light. Technol. 2014, 32, 4785–4795. [Google Scholar] [CrossRef]
- Atapattu, S.; Tellambura, C.; Jiang, H. A mixture gamma distribution to model the SNR of wireless channels. IEEE Trans. Wirel. Commun. 2011, 10, 4193–4203. [Google Scholar] [CrossRef]
- Zwillinger, D.; Jeffrey, A. Table of Integrals, Series, and Products; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Yu, X.; Zhang, J.; Haenggi, M.; Letaief, K.B. Coverage analysis for millimeter wave networks: The impact of directional antenna arrays. IEEE J. Sel. Areas Commun. 2017, 35, 1498–1512. [Google Scholar] [CrossRef]
- Peppas, K. Accurate closed-form approximations to generalised-K sum distributions and applications in the performance analysis of equal-gain combining receivers. IET Commun. 2011, 5, 982–989. [Google Scholar] [CrossRef]
- Wolfram Research. Available online: https://functions.wolfram.com/HypergeometricFunctions/MeijerG/21/01/02/01/ (accessed on 1 May 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meaning | Value |
|---|---|---|
| Noise variance of communication UAV receiver | 1 | |
| Noise variance of base station receiver | 1 | |
| Distance of communication link 1 | 100 m | |
| Distance of communication link 2 | 100 m | |
| Propagation loss coefficient | 2 | |
| Mean of amplitude of radar UAV transmitter | 10 | |
| Mean of amplitude of communication UAV transmitter | 10 | |
| Standard deviation of amplitude of radar UAV transmitter | 0.1 | |
| Standard deviation of amplitude of communication UAV transmitter | 0.1 | |
| Number of radar UAVs | 3 | |
| Number of SNR samples generated by Monte Carlo experiments | ||
| Approximation order of noncentral chi-squared distribution | 80.80 | |
| Number of radar UAV transmitting antenna array elements | 10 | |
| Number of receiving antenna elements of communication UAV | 10 | |
| Radar UAV transmitting antenna pointing average | 0 | |
| Average direction of communication UAV receiving antenna | 0 | |
| Standard deviation of radar UAV transmitting antenna misalignment | 0.06 | |
| Standard deviation of communication UAV receiving antenna misalignment | 0.06 | |
| Number of antenna pattern samples | 100 | |
| Nakagami fading parameters | 1 | |
| Nakagami fading parameters | 1 | |
| Rice fading parameters | 1.5 | |
| Approximate order of rice distribution | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Zhang, B.; Wang, H.; Peng, J. On the Communication Performance of Airborne Distributed Coherent Radar. Appl. Sci. 2022, 12, 6351. https://doi.org/10.3390/app12136351
Wu Q, Zhang B, Wang H, Peng J. On the Communication Performance of Airborne Distributed Coherent Radar. Applied Sciences. 2022; 12(13):6351. https://doi.org/10.3390/app12136351
Chicago/Turabian StyleWu, Qinhao, Bo Zhang, Hongqiang Wang, and Jinlin Peng. 2022. "On the Communication Performance of Airborne Distributed Coherent Radar" Applied Sciences 12, no. 13: 6351. https://doi.org/10.3390/app12136351
APA StyleWu, Q., Zhang, B., Wang, H., & Peng, J. (2022). On the Communication Performance of Airborne Distributed Coherent Radar. Applied Sciences, 12(13), 6351. https://doi.org/10.3390/app12136351