
The Wheel Flat Identification Based on Variational Modal Decomposition—Envelope Spectrum Method of the Axlebox Acceleration

Abstract
:1. Introduction
2. Dynamics Model
2.1. Vehicle-Track Coupled Dynamics Model
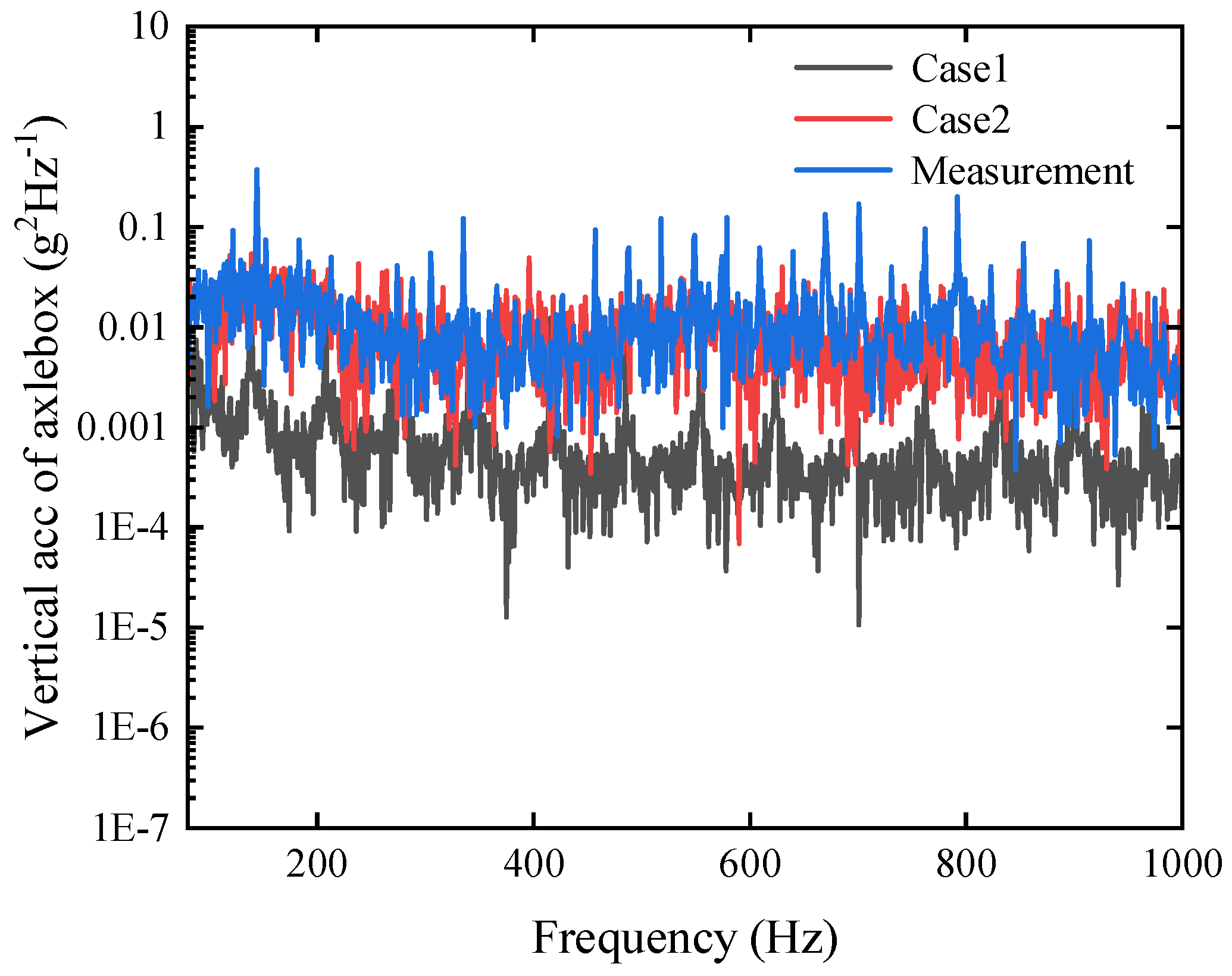
2.2. Model Validation
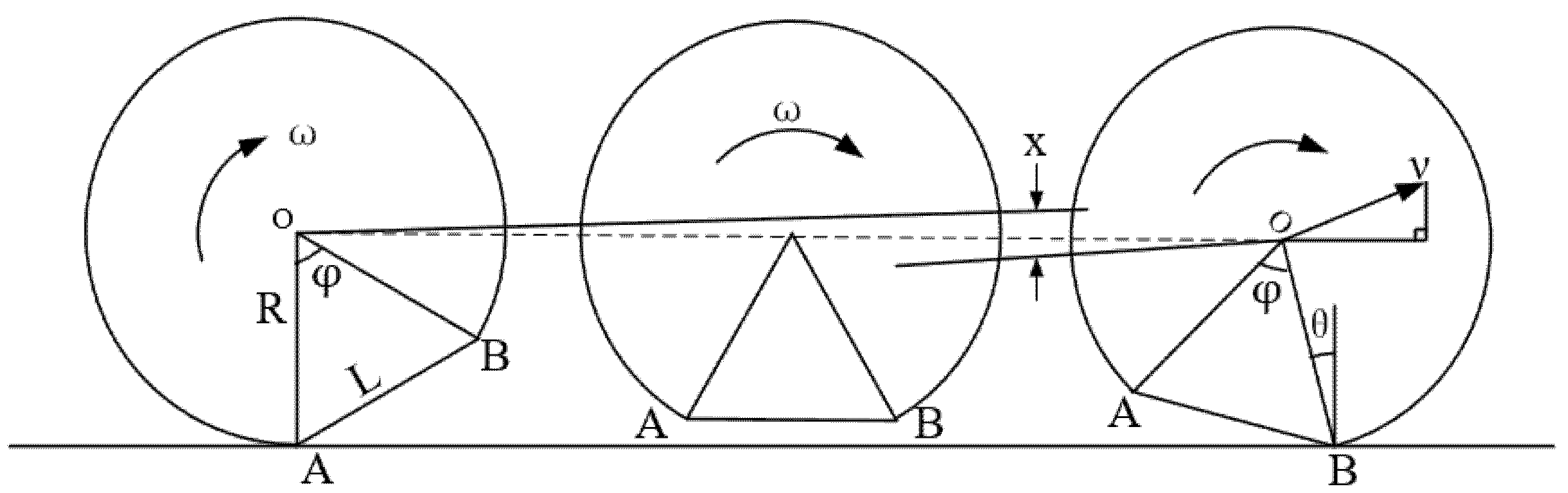
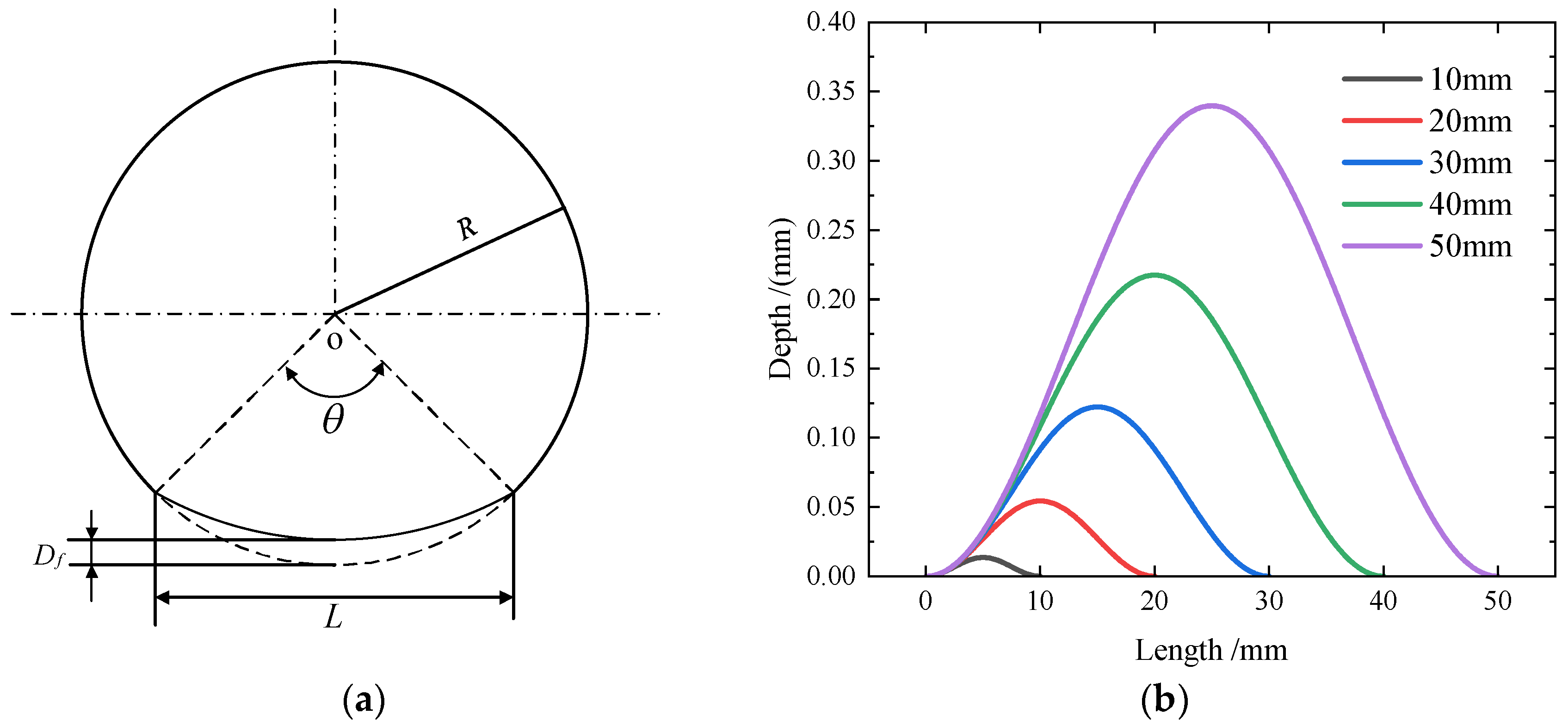
2.3. Wheel Flat Model
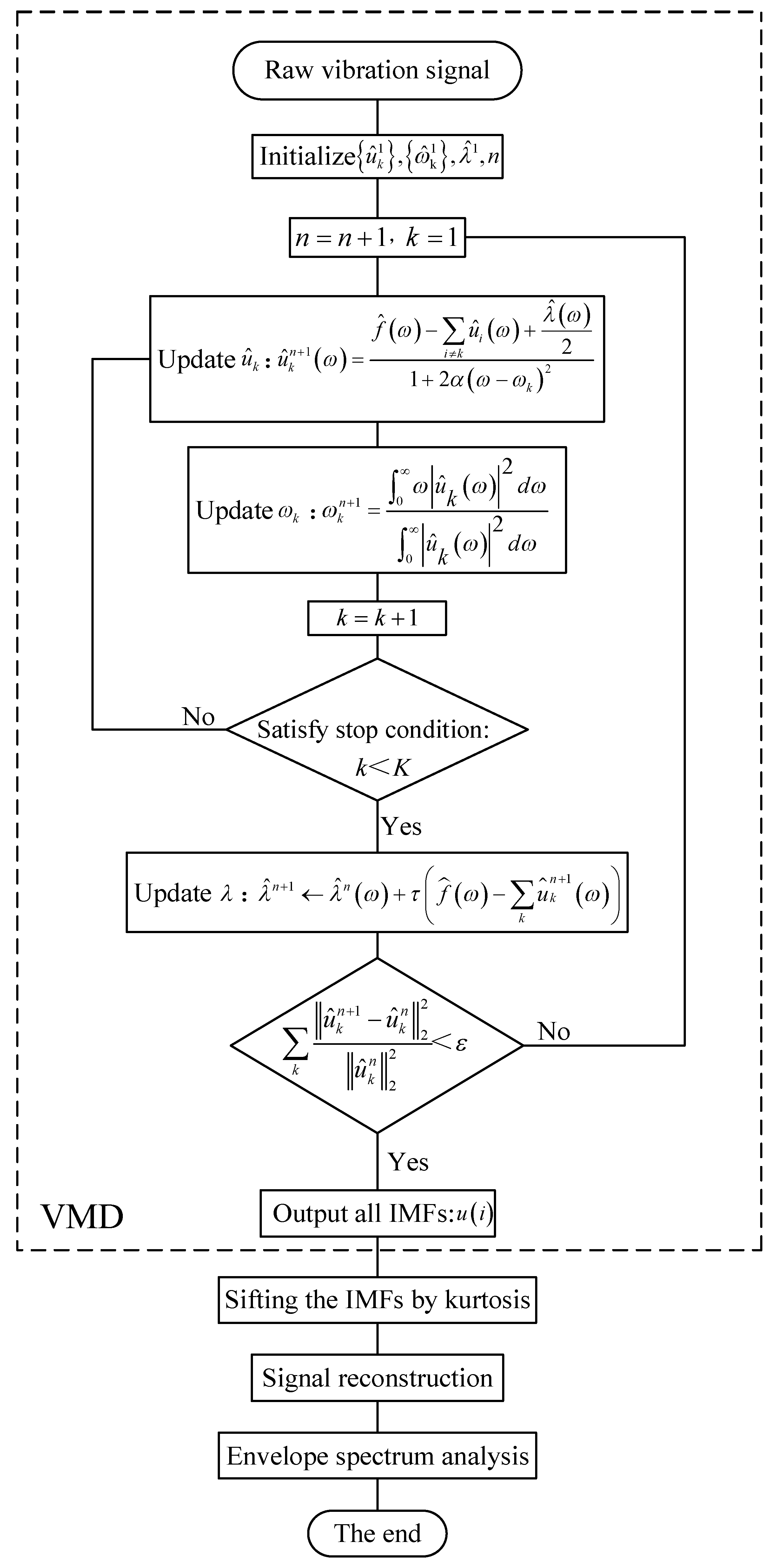
3. Signal Processing Method Based on VMD and ES
- (1)
- Hilbert–Huang transformation is performed on the signal:
- (2)
- Obtain envelope spectrum of the signal:
4. Wheel Flat Identification Based on Acceleration of Axlebox
4.1. VMD and IMFs Sifting
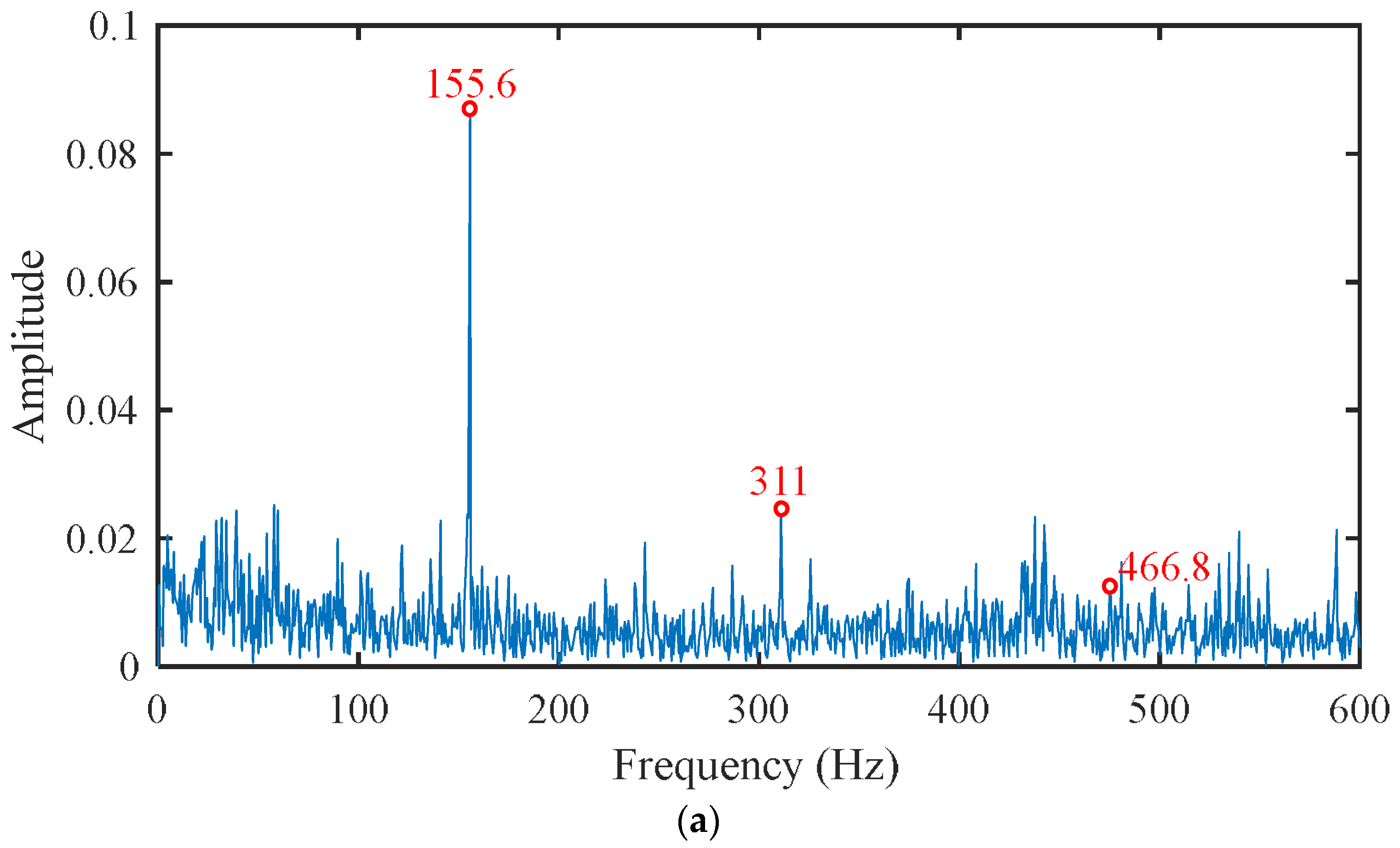
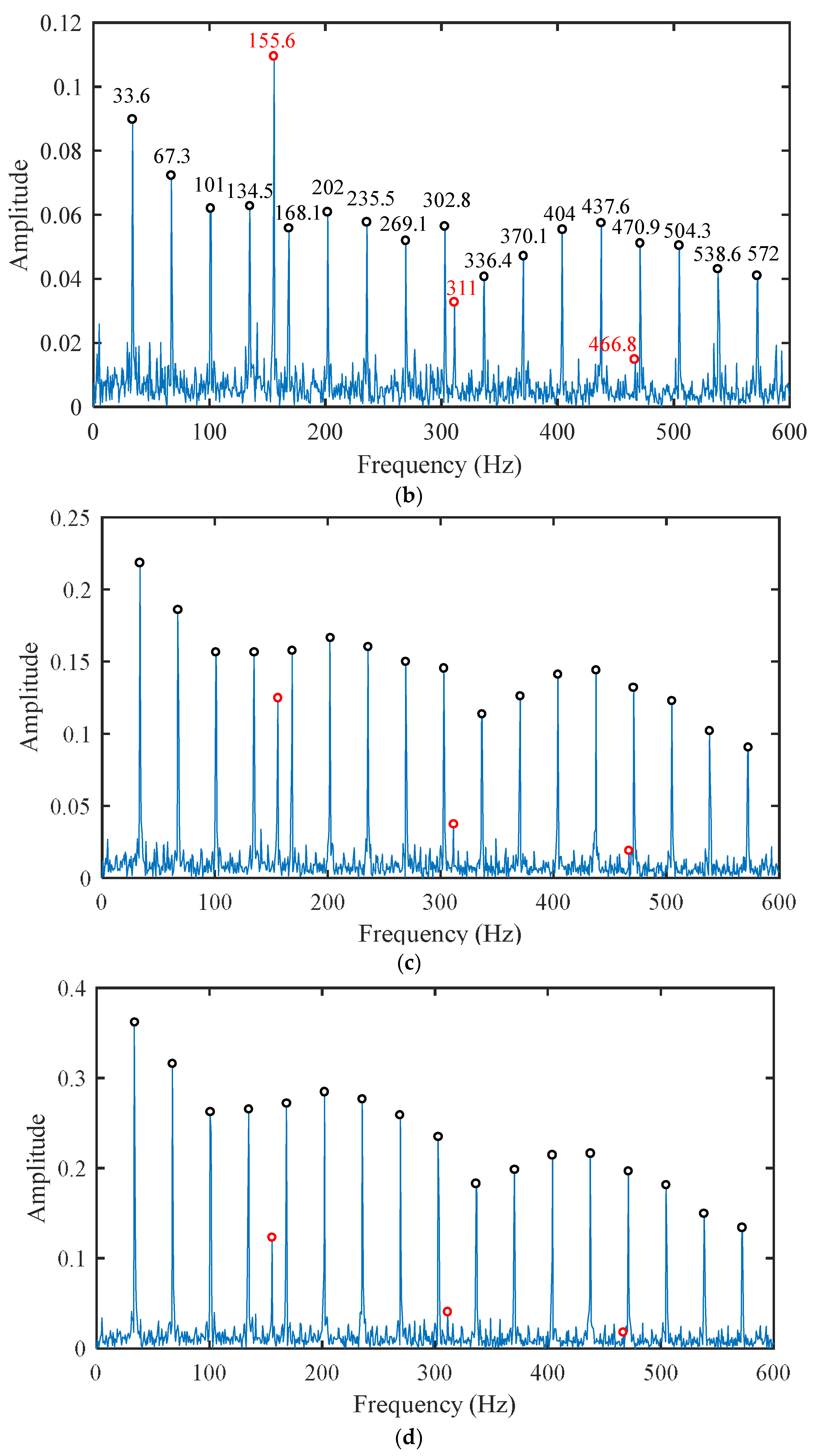
4.2. VMD-ES Analysis Results under 350 km/h
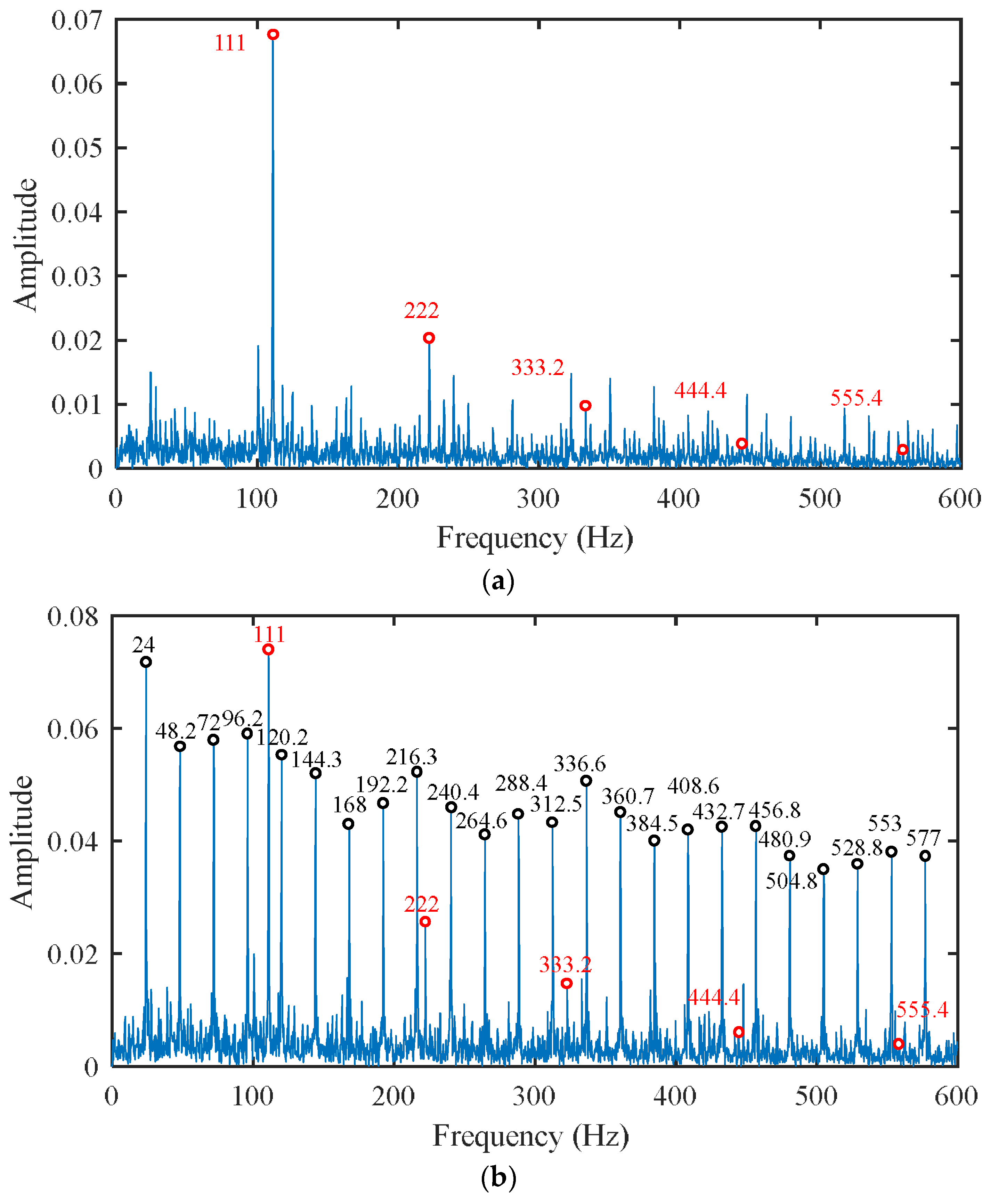
4.3. VMD-ES Analysis Results under 250 km/h
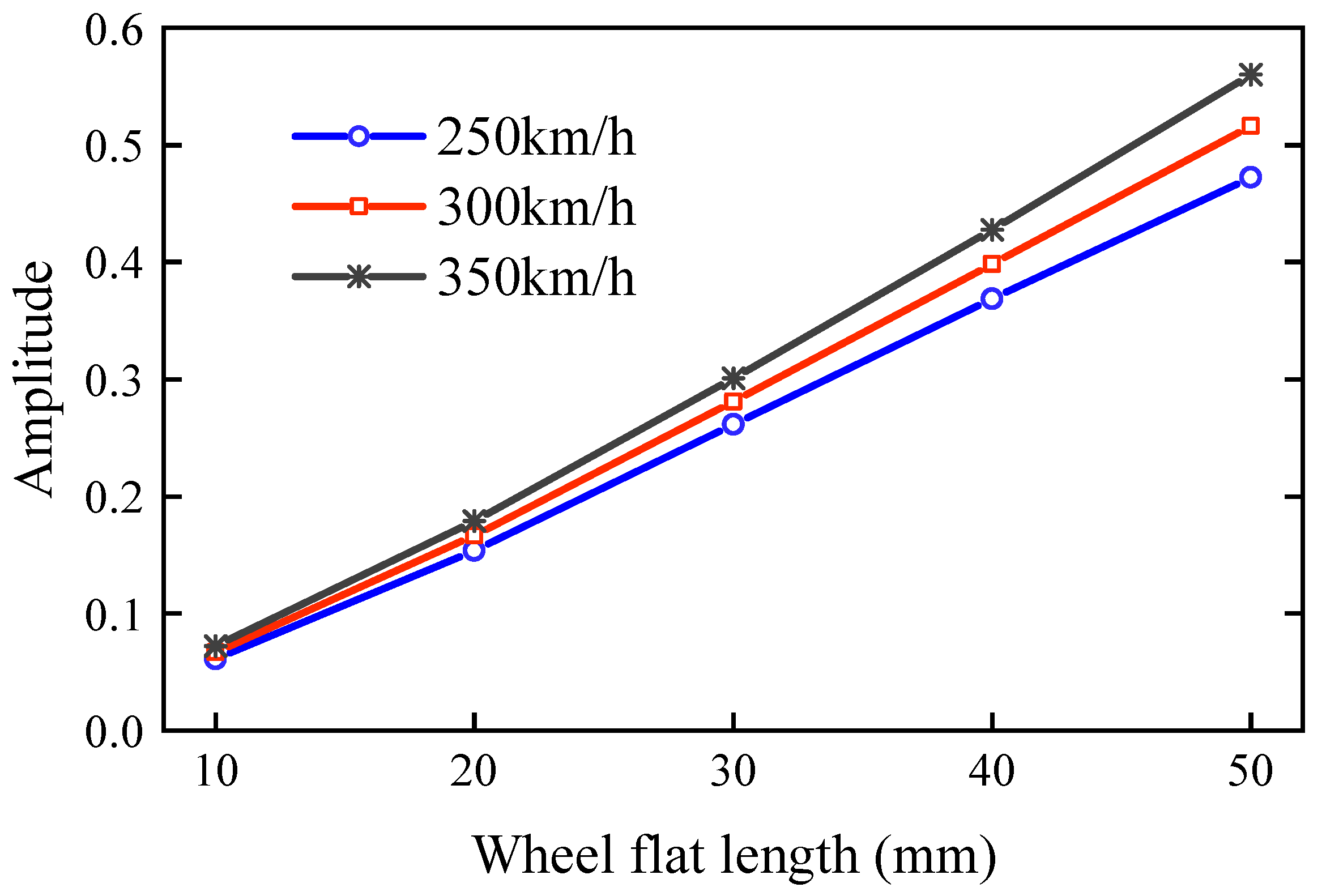
4.4. Error Analysis and Peak Value Comparison
5. Influence of the Wheel Eccentricity on Wheel Flat Identification
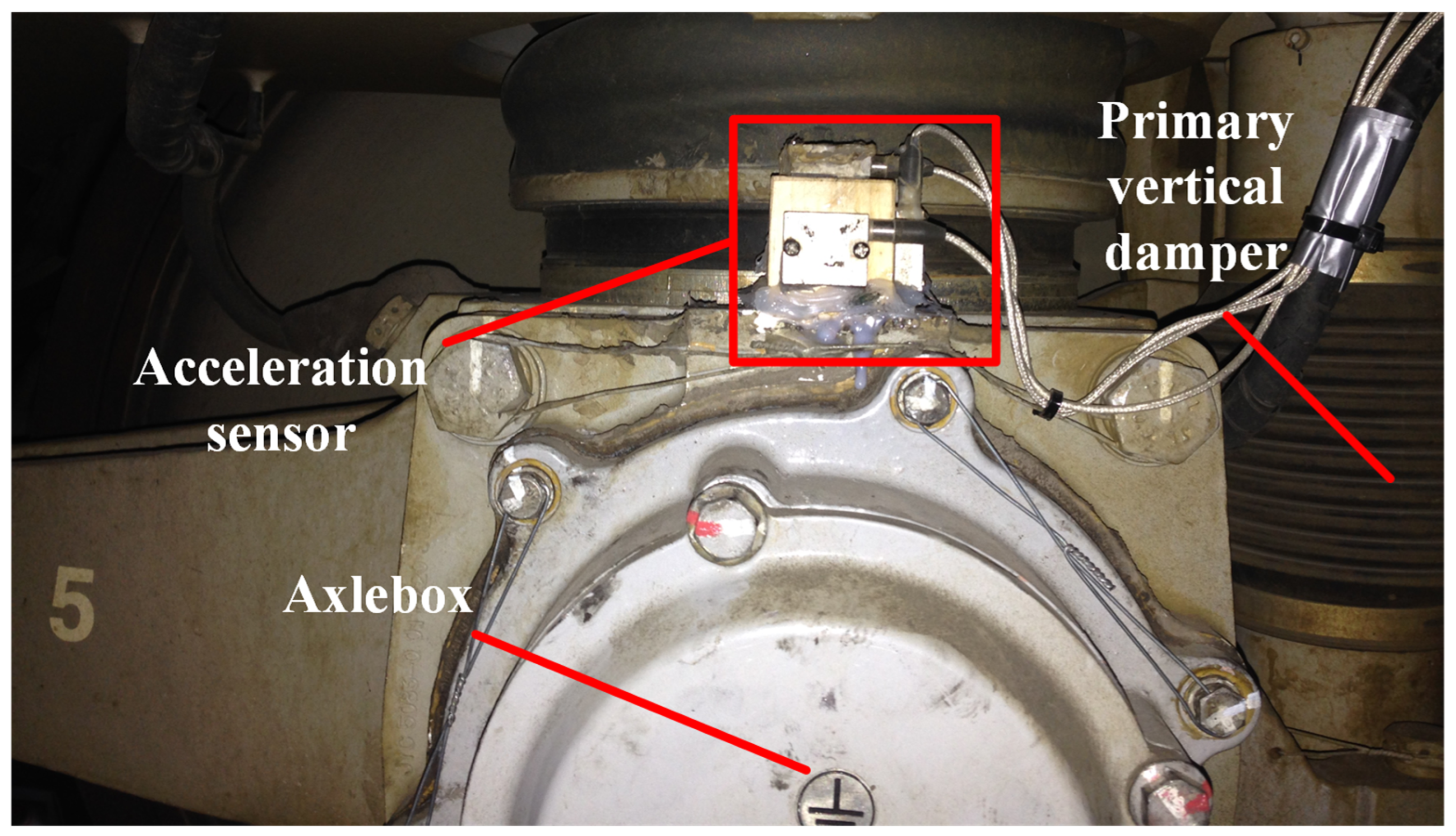
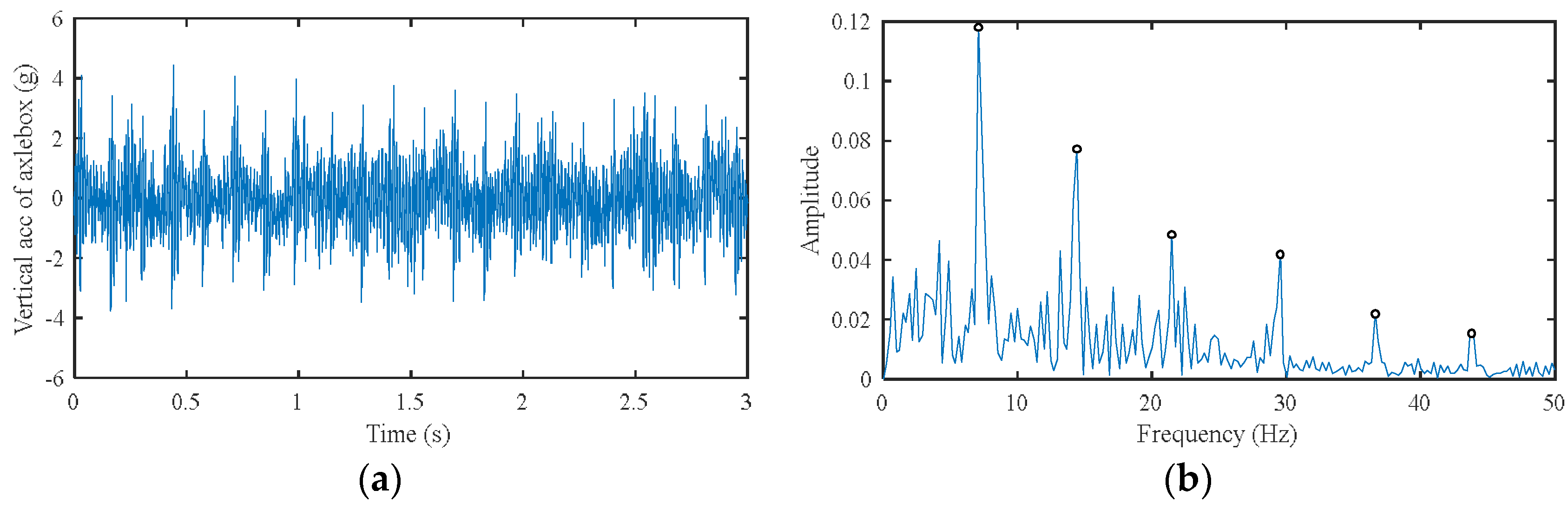
6. Field Test Validation
7. Conclusions
- (1)
- The axlebox acceleration includes strong interference signal excited by the rail and wheel which influences the accurate identification of the wheel flat. The results show that the proposed VMD–ES method accurately extracts the characteristic frequency of the wheel flat from complex frequency components. Meanwhile, the mean amplitude of the first four multiple frequency increases monotonically with the length of flat in ES. Therefore, the VMD–ES method can be applied to quantitatively identify the wheel flat faults at various speeds.
- (2)
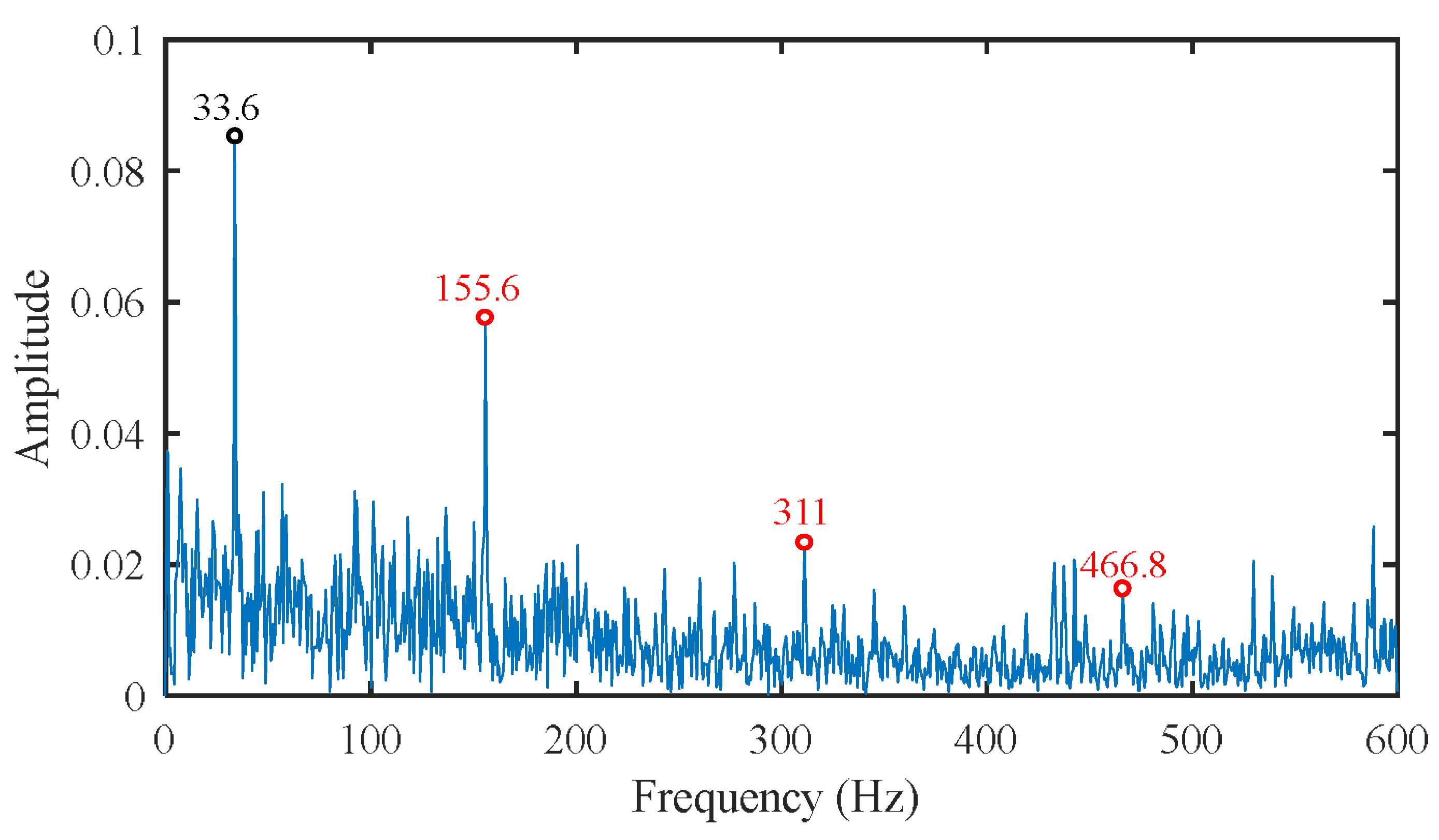
- In the case of the wheel eccentricity, only the dominant frequency (33.6 Hz) is presented in the results of ES. At the co-existence of the wheel eccentricity and flat, the VMD–ES method can accurately extract the multiple frequency of the wheel flat. The method has good adaptability in wheel flat identification; wheel eccentricity has no influence on the detection.
- (3)
- The field test is carried out to verify the accuracy of the method. The results of the field test are consistent with the simulation results, which reflect the correctness of the established vehicle-track coupled dynamics model, and the feasibility of the wheel flat identification by using this method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Z.; Allen, P.; Mei, G.; Yin, Z.; Cheng, Y.; Zhang, W. Dynamic characteristics of a high-speed train gearbox in the vehicle–track coupled system excited by wheel defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 1210–1226. [Google Scholar] [CrossRef]
- Wang, Z.; Mo, J.; Gebreyohanes, M.Y.; Wang, K.; Wang, J.; Zhou, Z. Dynamic response analysis of the brake disc of a high-speed train with wheel flats. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 593–605. [Google Scholar] [CrossRef]
- Masoudi Nejad, R.; Noroozian Rizi, P.; Zoei, M.S.; Aliakbari, K.; Ghasemi, H. Failure Analysis of a Working Roll Under the Influence of the Stress Field Due to Hot Rolling Process. J. Fail. Anal. Prev. 2021, 21, 870–879. [Google Scholar] [CrossRef]
- Bian, J.; Gu, Y.; Murray, M.H. A dynamic wheel-rail Impact analysis of rail rail track under Wheel flat by finite element analysis. Veh. Syst. Dyn. 2013, 51, 784–797. [Google Scholar] [CrossRef] [Green Version]
- Bernal, E.; Spiryagin, M.; Cole, C. Onboard condition monitoring sensors, systems and techniques for freight railway vehicles: A Review. IEEE Sens. J. 2019, 19, 4–24. [Google Scholar] [CrossRef]
- Mosleh, A.; Montenegro, P.A.; Costa, P.A.; Calçada, R. Railway vehicle wheel flat detection with multiple records using spectral kurtosis analysis. Appl. Sci. 2021, 11, 4002. [Google Scholar] [CrossRef]
- Alemi, A.; Corman, F.; Pang, Y.; Lodewijks, G. Reconstruction of an informative railway wheel defect signal from wheel-rail contact signals measured by multiple wayside sensors. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 233, 49–62. [Google Scholar] [CrossRef] [Green Version]
- Cao, W.; Zhang, S.; Bertola, N.J.; Smith, I.F.C.; Koh, C.G. Time series data interpretation for ‘wheel-flat’ identification including uncertainties. Struct. Health Monit. 2019. [Google Scholar] [CrossRef]
- Salzburger, H.J.; Schuppmann, M.; Li, W.; Gao, X. In-motion ultrasonic testing of the tread of high-speed railway wheels using the inspection system AUROPA III. Insight—Non-Destructive Test. Cond. Monit. 2009, 51, 370–372. [Google Scholar]
- Brizuela, J.; Ibañez, A.; Nevado, P.; Fritsch, C. Railway wheels flat detector using Doppler effect. Phys. Procedia 2010, 3, 811–817. [Google Scholar] [CrossRef] [Green Version]
- Brizuela, J.; Fritsch, C.; Ibáñez, A. Railway wheel-flat detection and measurement by ultrasound. Transp. Res. Part C Emerg. Technol. 2011, 19, 975–984. [Google Scholar] [CrossRef]
- Lai, C.C.; Kam, J.C.P.; Leung, D.C.C.; Lee, T.K.Y.; Tam, A.Y.M.; Ho, S.L.; Tam, H.Y.; Liu, M.S.Y. Development of a fiber-optic sensing system for train vibration and train weight measurements in Hong Kong. J. Sens. 2012, 2012, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Tam, H.Y.; Liu, S.Y.; Guan, B.O.; Chung, W.H.; Chan, T.H.T.; Cheng, L.K. Fiber Bragg Grating sensors for structural and railway applications. In Proceedings of the SPIE-The International Society for Optical Engineering, Beijing, China, 8 November 2004; pp. 85–97. [Google Scholar]
- Wei, C.; Lai, C.; Liu, S.; Chung, W.H.; Ho, T.K.; Tam, H.; Ho, S.L.; McCusker, A.; Kam, J.; Lee, K.Y. A Fiber Bragg Grating sensor system for train axle counting. IEEE Sens. J. 2010, 10, 1905–1912. [Google Scholar]
- Filograno, M.L.; Rodriguez-Barrios, A.; González-Herraez, M.; Corredera, P.; Martín-López, S.; Rodríguez-Plaza, M.; Andrés-Alguacil, A. Real-time monitoring of railway traffic using Fiber Bragg Grating sensors. IEEE Sens. J. 2012, 12, 85–92. [Google Scholar] [CrossRef]
- Alemi, A.; Corman, F.; Lodewijks, G. Condition monitoring approaches for the detection of railway wheel defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2017, 231, 961–981. [Google Scholar] [CrossRef] [Green Version]
- Liang, B.; Iwnicki, S.; Ball, A.; Young, A.E. Adaptive noise cancelling and time–frequency techniques for rail surface defect detection. Mech. Syst. Signal Process. 2014, 54–55, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Bosso, N.; Gugliotta, A.; Zamperi, N. Wheel flat detection algorithm for onboard diagnostic. Measurement 2018, 123, 193–202. [Google Scholar] [CrossRef]
- Shim, J.; Kim, G.; Cho, B.; Koo, J. Application of vibration signal processing methods to detect and diagnose wheel flats in railway vehicles. Appl. Sci. 2021, 11, 2151. [Google Scholar] [CrossRef]
- Shi, D.; Ye, Y.; Gillwal, M.; Hecht, M. Designing a lightweight 1D convolutional neural network with Bayesian optimization for wheel flat detection using carbody accelerations. Int. J. Rail Transp. 2020, 9, 311–341. [Google Scholar] [CrossRef]
- Bernal, E.; Spiryagin, M.; Cole, C. Wheel flat analogue fault detector verification study under dynamic testing conditions using a scaled bogie test rig. Int. J. Rail Transp. 2021, 10, 177–194. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Li, Y.; Zuo, M.J.; Lin, J.; Liu, J. Fault detection method for railway wheel flat using an adaptive multiscale morphological filter. Mech. Syst. Signal Process. 2017, 84, 642–658. [Google Scholar] [CrossRef]
- Li, Y.; Liu, J.; Wang, Y. Railway wheel flat detection based on improved empirical mode decomposition. Shock Vib. 2016, 2016, 4879283. [Google Scholar] [CrossRef]
- Chen, S.; Wang, K.; Chang, C.; Xie, B.; Zhai, W. A two-level adaptive chirp mode decomposition method for the railway wheel flat detection under variable-speed conditions. J. Sound Vib. 2021, 498, 115963. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Zhu, S.; Xia, H.; Peng, B.; Zio, E.; Wang, Z.; Jiang, Y. Feature extraction for early fault detection in rotating machinery of nuclear power plants based on adaptive VMD and Teager energy operator. Ann. Nucl. Energy 2021, 160, 108392. [Google Scholar] [CrossRef]
- Jin, Z.; He, D.; Wei, Z. Intelligent fault diagnosis of train axle box bearing based on parameter optimization VMD and improved DBN. Eng. Appl. Artif. Intel. 2022, 110, 104713. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. An optimized VMD method and its applications in bearing fault diagnosis. Measurement 2020, 166, 108185. [Google Scholar] [CrossRef]
- Bernal, E.; Spiryagin, M.; Cole, C. Wheel flat detectability for Y25 railway freight wagon using vehicle component acceleration signals. Veh. Syst. Dyn. 2020, 58, 1893–1913. [Google Scholar] [CrossRef]
- Zhai, W. Vehicle-Track Coupled Dynamics Theory and Applications; Springer: Singapore, 2020. [Google Scholar]
- Wu, T.; Thompson, D. A hybrid model for the noise generation due to railway wheel flats. J. Sound Vib. 2002, 251, 115–139. [Google Scholar] [CrossRef]
- Yang, J.; Zhou, C.; Li, X. Research on Fault Feature Extraction Method Based on Parameter Optimized Variational Mode Decomposition and Robust Independent Component Analysis. Coatings 2022, 12, 419. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Wheelset | Mass (kg) | 1627 |
| Moments of pitch inertia (kg m2) | 825 | |
| Moments of roll inertia (kg m2) | 132 | |
| Moments of yaw inertia (kg m2) | 830 | |
| Nominal rolling radius (m) | 0.46 | |
| Wheel tread | S1002G | |
| Axlebox | Mass (kg) | 66.7 |
| Moments of pitch inertia (kg m2) | 0.3 | |
| Moments of roll inertia (kg m2) | 2 | |
| Moments of yaw inertia (kg m2) | 2 | |
| Bogie | Mass (kg) | 2056 |
| Moments of pitch inertia (kg m2) | 1390 | |
| Moments of roll inertia (kg m2) | 2590 | |
| Moments of yaw inertia (kg m2) | 3800 |
| Components | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Kurtosis | 2.82 | 2.99 | 7.39 | 8.54 | 11.67 | 11.74 | 13.61 | 12.76 | 14.93 | 15.18 |
| Speed | Wheel Flat ImpactFrequency | 1st Order | 2nd Order | 3rd Order | 4th Order |
|---|---|---|---|---|---|
| 250/(km/h−1) | Theoretical value/Hz | 24 | 48 | 72 | 96 |
| Simulated value/Hz | 24 | 48.2 | 72 | 96.2 | |
| Error rate/% | 0 | 0.4 | 0 | 0.2 | |
| 350/(km/h−1) | Theoretical value/Hz | 33.6 | 67.2 | 100.8 | 134.4 |
| Simulated value/Hz | 33.6 | 67.3 | 101 | 134.5 | |
| Error rate/% | 0 | 0.1 | 0.2 | 0.07 |
| Speed | Fastener SupportFrequency | 1st Order | 2nd Order | 3rd Order | 4th Order |
|---|---|---|---|---|---|
| 250/(km/h−1) | Theoretical value/Hz | 111 | 222 | 333 | 444 |
| Simulated value /Hz | 111 | 222 | 333.2 | 444.4 | |
| Error rate/% | 0 | 0 | 0.06 | 0.09 | |
| 350/(km/h−1) | Theoretical value/Hz | 155.6 | 311.2 | 466.8 | 622.4 |
| Simulated value/Hz | 155.6 | 311 | 466.8 | 622.7 | |
| Error rate/% | 0 | 0.06 | 0 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; He, Z.; Wang, Y.; Yang, L.; Wang, H.; Cheng, L. The Wheel Flat Identification Based on Variational Modal Decomposition—Envelope Spectrum Method of the Axlebox Acceleration. Appl. Sci. 2022, 12, 6837. https://doi.org/10.3390/app12146837
Liu X, He Z, Wang Y, Yang L, Wang H, Cheng L. The Wheel Flat Identification Based on Variational Modal Decomposition—Envelope Spectrum Method of the Axlebox Acceleration. Applied Sciences. 2022; 12(14):6837. https://doi.org/10.3390/app12146837
Chicago/Turabian StyleLiu, Xuqi, Zhenxing He, Yukui Wang, Lirong Yang, Haiyong Wang, and Long Cheng. 2022. "The Wheel Flat Identification Based on Variational Modal Decomposition—Envelope Spectrum Method of the Axlebox Acceleration" Applied Sciences 12, no. 14: 6837. https://doi.org/10.3390/app12146837