
Optical Fiber Sensor with Stable Operating Point for AC Magnetic Field Measurement

 , and
, and 
Abstract
:1. Introduction
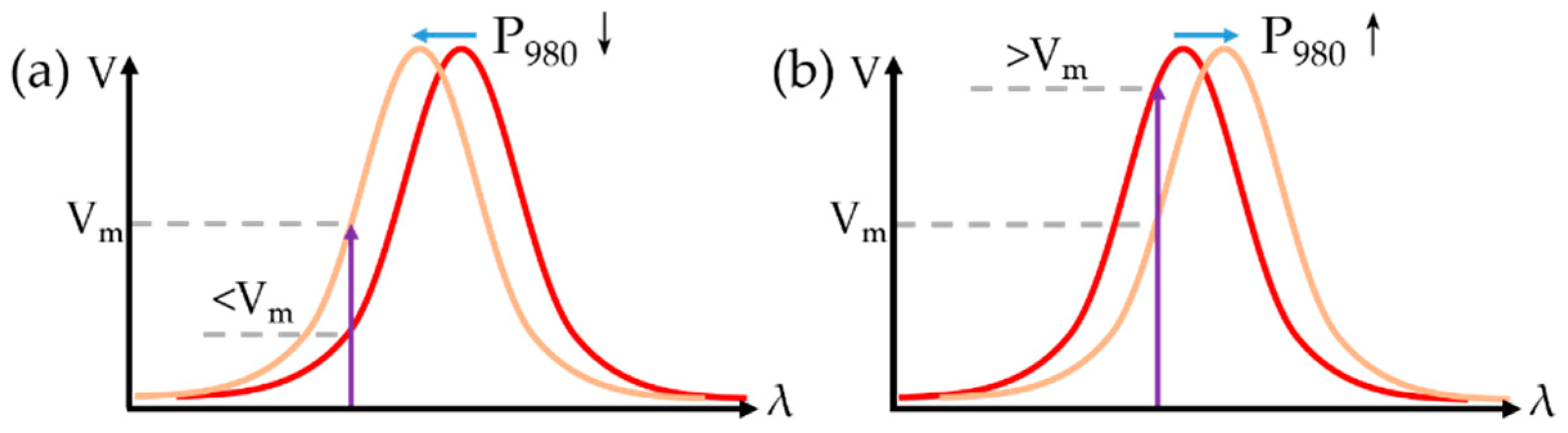
2. Theoretical Analysis
3. Sensor Fabrication and Characterization
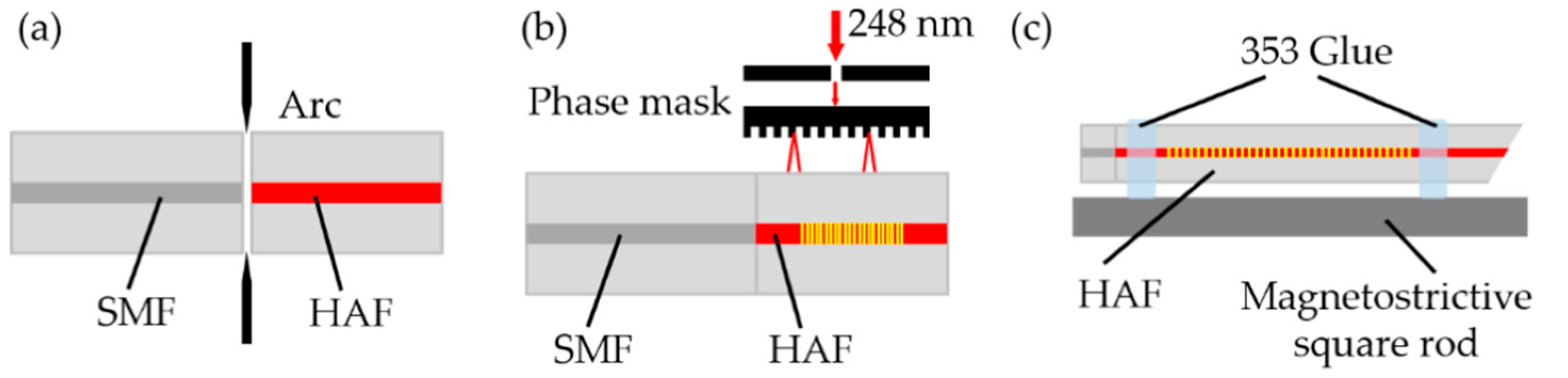
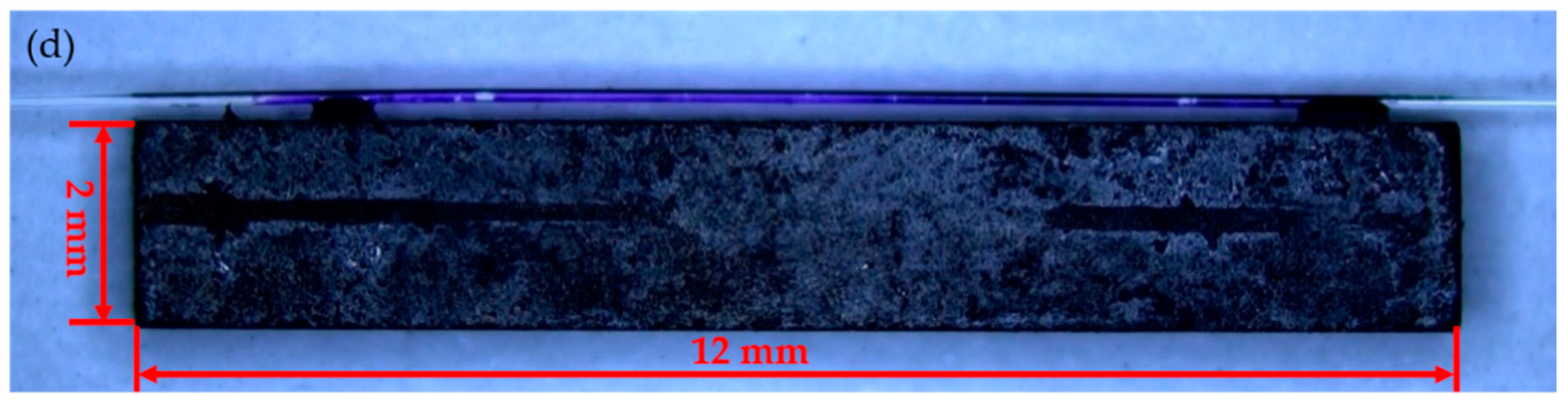
3.1. Fabrication Process
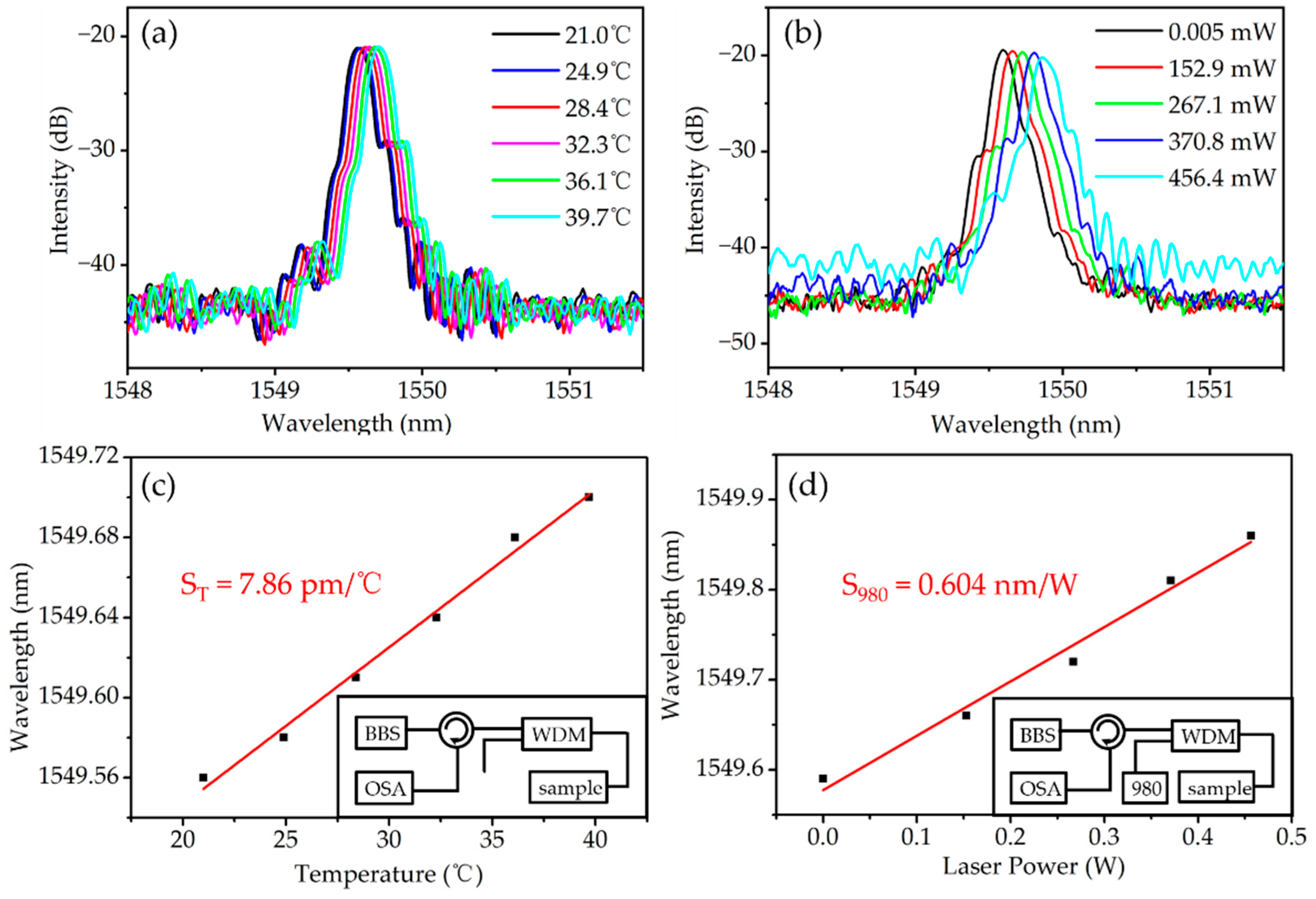
3.2. Sensor Characterization
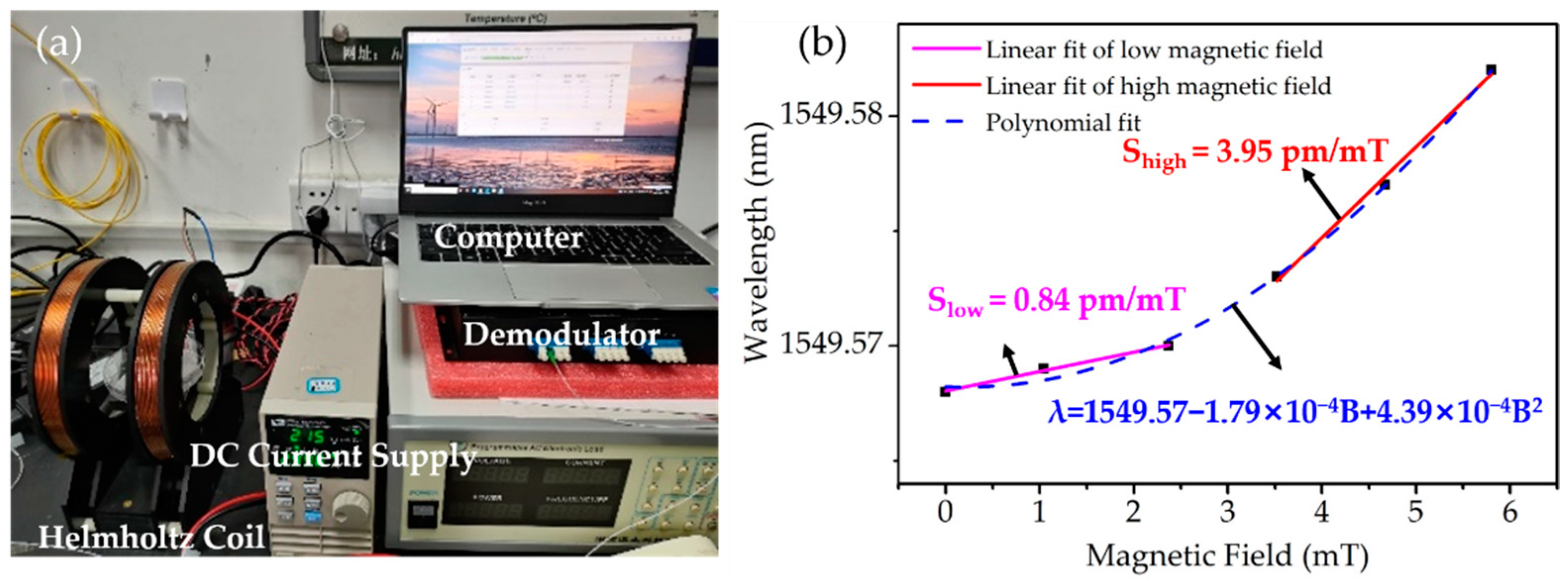
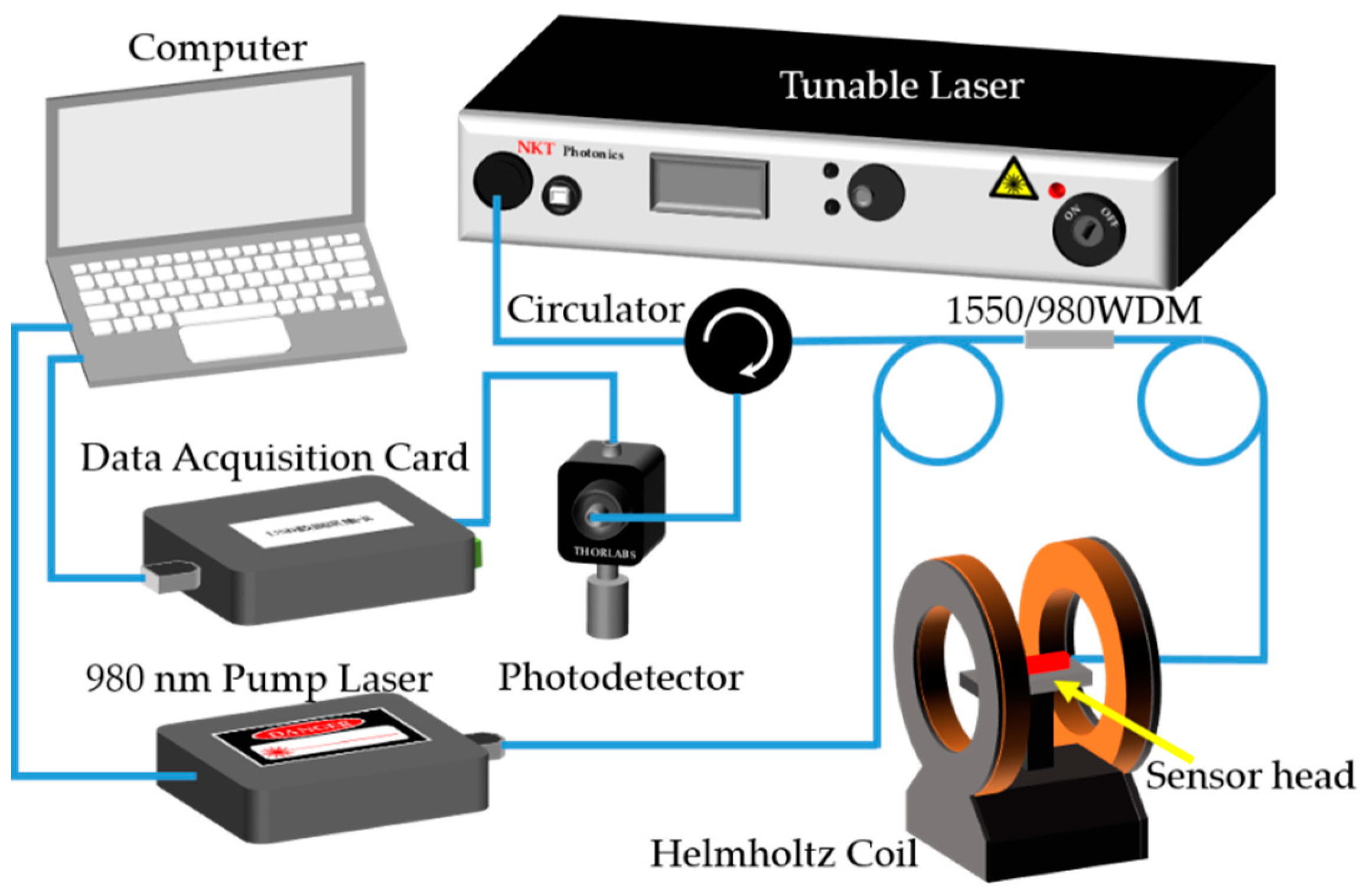
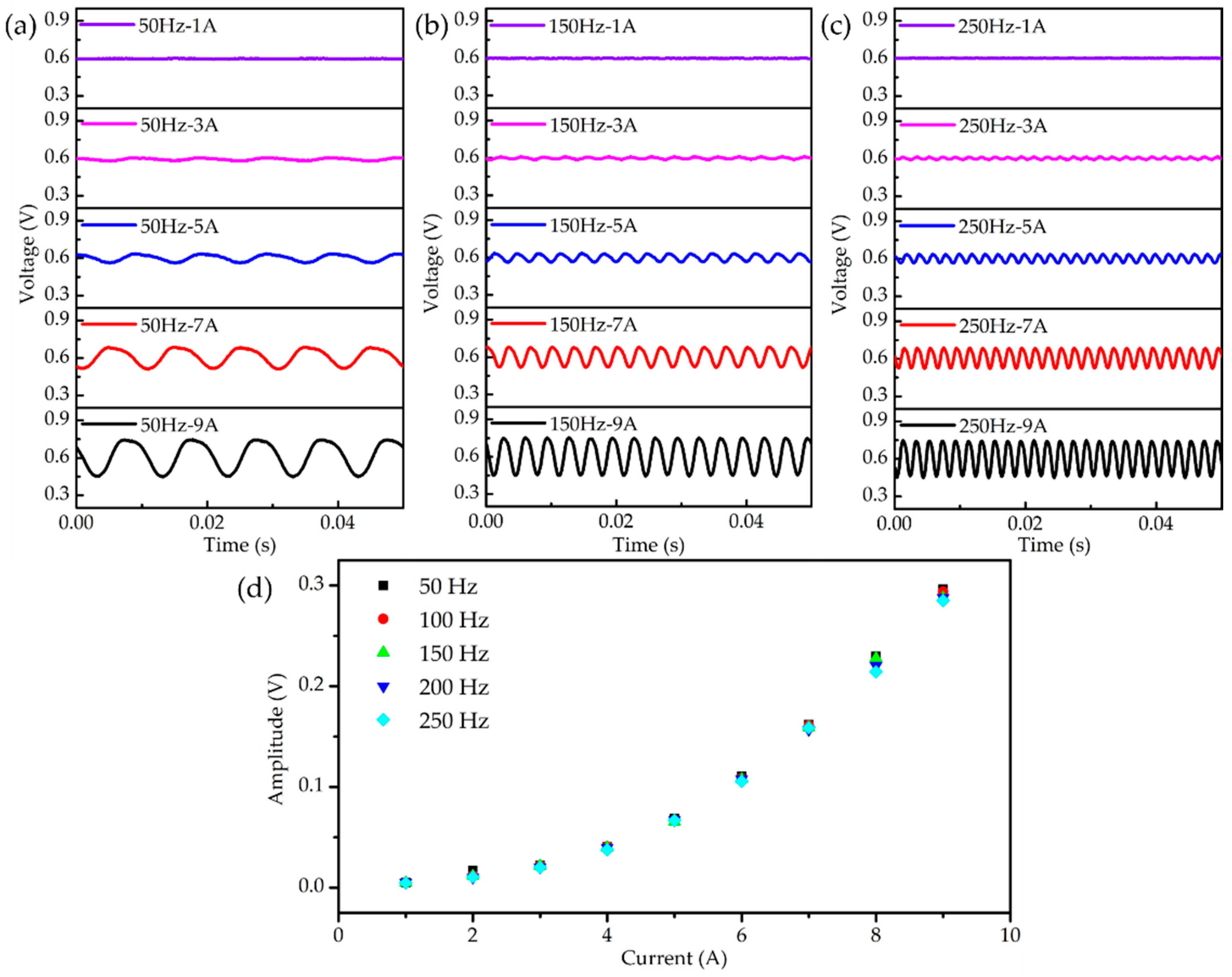
3.3. AC Magnetic Field Sensing and Stable Operating-Point Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lenz, J.; Edelstein, A.S. Magnetic sensors and their applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Bieler, G.; Werneck, M.M. A magnetostrictive-fiber Bragg grating sensor for induction motor health monitoring. Measurement 2018, 122, 117–127. [Google Scholar] [CrossRef]
- Dante, A.; David, J.; Cremonezi, A.O.; Bacurau, R.M.; Werneck, M.M. Fiber-optic current sensor based on FBG and Terfenol-D with magnetic flux concentration for enhanced sensitivity and linearity. IEEE Sens. J. 2020, 20, 3572–3578. [Google Scholar]
- Ding, G.; Zhang, S.; Cao, H.; Gao, B.; Zhang, B. Flux density measurement of radial magnetic bearing with a rotating rotor based on fiber Bragg grating-giant magnetostrictive material sensors. Appl. Opt. 2017, 56, 4975–4981. [Google Scholar] [CrossRef]
- Kaidarova, B.A.; Liu, W.; Swanepoel, L.; Almansouri, A.; Geraldi, N.R.; Duarte, C.M.; Kosel, J. Flexible Hall sensor made of laser-scribed graphene. Npj Flex. Electron. 2021, 5, 2. [Google Scholar] [CrossRef]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M.C. Recent developments of magnetoresistive sensors for industrial applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef] [Green Version]
- Henry, S.; di Borgo, E.P.; Cavaillou, A. Tracking geomagnetic fluctuations to picotesla accuracy using two superconducting quantum interference device vector magnetometers. Rev. Sci. Instrum. 2013, 84, 024501. [Google Scholar] [CrossRef]
- Zhou, X.; Li, X.; Li, S.; An, G.; Cheng, T. Magnetic field sensing based on SPR optical fiber sensor interacting with magnetic fluid. IEEE Trans. Instrum. Meas. 2019, 68, 234–239. [Google Scholar] [CrossRef]
- Alberto, N.; Domingues, M.F.; Belo, J.H.; Marques, C.; Antunesa, P.; Amaral, V.; Andre, P. Optical fibre fuse effect based sensor for magnetic field monitoring. In Proceedings of the Spie Optics + Optoelectronics, Prague, Czech Republic, 1–4 April 2019; Volume 110281S. [Google Scholar]
- Liu, C.; Shen, T.; Wu, H.; Feng, Y.; Chen, J. Applications of magneto-strictive, magneto-optical, magnetic fluid materials in optical fiber current sensors and optical fiber magnetic field sensors: A review. Opt. Fiber Technol. 2021, 65, 102634. [Google Scholar] [CrossRef]
- Thakur, H.V.; Nalawade, S.M.; Gupta, S.; Kitture, R.; Kale, S.N. Photonic crystal fiber injected with Fe3O4 nanofluid for magnetic field detection. Appl. Phys. Lett. 2011, 99, 161101. [Google Scholar] [CrossRef]
- Dai, J.; Yang, M.; Li, X.; Liu, H.; Tong, X. Magnetic field sensor based on magnetic fluid clad etched fiber Bragg grating. Opt. Fiber Technol. 2011, 17, 210–213. [Google Scholar] [CrossRef]
- Davino, D.; Visone, C.; Ambrosino, C.; Campopiano, S.; Cusano, A.; Cutolo, A. Compensation of hysteresis in magnetic field sensors employing fiber Bragg grating and magneto-elastic materials. Sens. Actuator A Phys. 2008, 147, 127–136. [Google Scholar] [CrossRef]
- Yang, M.; Dai, J.; Zhou, C.; Jiang, D. Optical fiber magnetic field sensors with TbDyFe magnetostrictive thin films as sensing materials. Opt. Express 2009, 17, 20777–20782. [Google Scholar] [CrossRef]
- Quintero, S.; Braga, A.; Weber, H.; Bruno, A.; Araújo, J. A magnetostrictive composite-fiber Bragg grating sensor. Sensors 2010, 10, 8119–8128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, H.; Or, S.W.; Tam, H.Y. Magnetostrictive composite–fiber Bragg grating (MC–FBG) magnetic field sensor. Sens. Actuator A Phys. 2012, 173, 122–126. [Google Scholar] [CrossRef]
- Zhao, Q.; Dai, Y.; Li, T.; Liu, B.; Yang, M.; Yin, G. Femtosecond laser ablation of microstructures in fiber and application in magnetic field sensing. Opt. Lett. 2014, 39, 1905–1908. [Google Scholar] [CrossRef]
- Zhang, P.; Tang, M.; Gao, F.; Zhu, B.; Fu, S.; Ouyang, J.; Zhao, Z.; Wei, H.; Li, J.; Shum, P.P.; et al. An ultra-sensitive magnetic field sensor based on extrinsic fiber-optic Fabry–Perot interferometer and Terfenol-D. J. Light. Technol. 2015, 33, 3332–3337. [Google Scholar] [CrossRef]
- Lopez, J.D.; Dante, A.; Bacurau, R.M.; Cremonezi, A.Q.; Mok, R.W.; Carvalho, C.C.; Allil, R.C.S.B.; Ferreira, E.C.; Werneck, M.M. Fiber-optic current sensor based on FBG and optimized magnetostrictive composite. IEEE Photon. Technol. Lett. 2019, 31, 1987–1990. [Google Scholar] [CrossRef]
- Lopez, J.D.; Dante, A.; Carvalho, C.C.; Allil, R.C.S.B.; Werneck, M.M. Simulation and experimental study of FBG-based magnetic field sensors with Terfenol-D composites in different geometric shapes. Measurement 2020, 172, 108893. [Google Scholar] [CrossRef]
- Sun, L.; Jiang, S.; Zuegel, J.D.; Marciante, J.R. Effective Verdet constant in a terbium-doped-core phosphate fiber. Opt. Lett. 2009, 34, 1699–1701. [Google Scholar] [CrossRef]
- Crassee, I.; Levallois, J.; Walter, A.L.; Ostler, M.; Bostwick, A.; Rotenberg, E.; Seyller, T.; van der Marel, D.; Kuzmenko, A.B. Giant Faraday rotation in single- and multilayer graphene. Nat. Phys. 2011, 7, 48–51. [Google Scholar] [CrossRef] [Green Version]
- Son, C.; Ju, H. Magnetic control of optical reflectance from metallic thin film using surface plasmon resonance and Faraday rotation. Materials 2021, 14, 3354. [Google Scholar] [CrossRef] [PubMed]
- Parsa, N.; Gasper, M.R.; Amacher, B.C.; Toonen, R.C. Millimeter-wave Faraday rotation from ferromagnetic nanowires. IEEE Trans. Nanotechnol. 2019, 18, 839–844. [Google Scholar] [CrossRef]
- Xia, J.; Wang, Q.; Liu, X.; Luo, H. Fiber optic Fabry-Perot current sensor integrated with magnetic fluid using a fiber Bragg grating. Sensors 2015, 15, 16632–16641. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Wang, X.; Lv, R.; Li, G.; Zheng, H.; Zhou, Y. Highly sensitive reflective Fabry-Perot magnetic field sensor using magnetic fluid based on Vernier effect. IEEE Trans. Instrum. Meas. 2020, 70, 7000808. [Google Scholar] [CrossRef]
- Zu, P.; Chan, C.C.; Lew, W.S.; Hu, L.; Jin, Y.; Liew, H.F.; Chen, L.; Wong, W.; Dong, X. Temperature-insensitive magnetic field sensor based on nanoparticle magnetic fluid and photonic crystal fiber. IEEE Photon. J. 2012, 4, 491–498. [Google Scholar]
- Zhang, Y.; Pu, S.; Li, Y.; Hao, Z.; Li, D.; Yan, S.; Yuan, M.; Zhang, C. Magnetic field and temperature dual-parameter sensor based on nonadiabatic tapered microfiber cascaded with FBG. IEEE Access 2022, 10, 15478–15486. [Google Scholar] [CrossRef]
- Mohammed, A.; Melecio, J.I.; Djurović, S. Electrical machine permanent magnets health monitoring and diagnosis using an air-gap magnetic sensor. IEEE Sens. J. 2020, 20, 5251–5259. [Google Scholar] [CrossRef]
- Peng, J.; Zhang, S.; Jia, S.; Kang, X.; Yu, H.; Yang, S.; Wang, S.; Yang, Y. A highly sensitive magnetic field sensor based on FBG and magnetostrictive composite with oriented magnetic domains. Measurement 2022, 189, 110667. [Google Scholar] [CrossRef]
- Yoffe, G.W.; Krug, P.A.; Ouellette, F.; Thorncraft, D.A. Passive temperature compensating package for optical fiber gratings. Appl. Opt. 1995, 34, 6859–6861. [Google Scholar] [CrossRef]
- Liu, Q.; Jing, Z.; Liu, Y.; Li, A.; Zhang, Y.; Huang, Z.; Han, M.; Peng, W. Quadrature phase-stabilized three-wavelength interrogation of a fiber-optic Fabry-Perot acoustic sensor. Opt. Lett. 2019, 44, 5402–5405. [Google Scholar] [CrossRef] [PubMed]
- Mora, J.; Diez, A.; Cruz, J.L.; Andres, M.V. Magnetostrictive Sensor Interrogated by Fiber Gratings for DC-Current and Temperature Discrimination. IEEE Photonics Technol. Lett. 2000, 12, 1680–1682. [Google Scholar] [CrossRef]
- Ma, R.; Zhang, W.; Wang, Z.; Huang, W.; Li, F. Magnetic sensor based on Terfenol-D materials and fiber Bragg grating Fabry-Perot cavity. Acta Photonics Sin. 2018, 47, 0306006. [Google Scholar]
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; LeBlanc, M.; Koo, K.P.; Askins, C.G.; Putnam, M.A.; Friebele, E.J. Fiber grating sensors. J. Light. Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yan, G.; Zhang, L.; He, S. Microfluidic flowmeter based on micro “hot-wire” sandwiched Fabry-Perot interferometer. Opt. Express 2015, 23, 9483–9493. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Xie, L.; Lin, H.; Tan, Q.; Chen, X.; He, S. Fiber acoustic sensor with stable operating-point based on a photo-thermal cavity. IEEE Sens. J. 2022, 22, 1321–1326. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Year | Sensing Structure | Effective Sensing Length (mm) | Sensitivity (pm/mT) | Temperature Compensation Method |
|---|---|---|---|---|---|
| [12] | 2011 | Etched FBG immersed in magnetic fluid | No mention | 3.44 | No |
| [14] | 2009 | Etched FBG coated with TbDyFe/FeNi thin film | 15 | 1.08 | A separate FBG temperature sensor |
| [33] | 2000 | Standard FBG bonded onto Terfenol–D alloy surface | 25 | 8.68 | A separate FBG temperature sensor |
| [20] | 2021 | FBG embedded in Terfenol–D composite | 16 | 2.70 | A separate FBG temperature sensor |
| [30] | 2022 | FBG embedded in Terfenol–D composite | 40 | 9.83 | No |
| This work | HAFBG bonded onto Terfenol-D alloy surface | 10 | 3.95 | Photo-thermal effect of HAF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Wu, S.; Lin, H.; Liu, L.; Forsberg, E.; He, S. Optical Fiber Sensor with Stable Operating Point for AC Magnetic Field Measurement. Appl. Sci. 2022, 12, 7049. https://doi.org/10.3390/app12147049
Chen X, Wu S, Lin H, Liu L, Forsberg E, He S. Optical Fiber Sensor with Stable Operating Point for AC Magnetic Field Measurement. Applied Sciences. 2022; 12(14):7049. https://doi.org/10.3390/app12147049
Chicago/Turabian StyleChen, Xiaolu, Shengnan Wu, Huaguan Lin, Liu Liu, Erik Forsberg, and Sailing He. 2022. "Optical Fiber Sensor with Stable Operating Point for AC Magnetic Field Measurement" Applied Sciences 12, no. 14: 7049. https://doi.org/10.3390/app12147049
APA StyleChen, X., Wu, S., Lin, H., Liu, L., Forsberg, E., & He, S. (2022). Optical Fiber Sensor with Stable Operating Point for AC Magnetic Field Measurement. Applied Sciences, 12(14), 7049. https://doi.org/10.3390/app12147049