1. Introduction
Due to the evolution of transmissions in high-speed communications (HSC), the low-data rate control signaling system has evolved into diverse data-intensive services [
1]. As compared to other wireless networks, HSC systems feature high mobility of the transceivers, along with significant signal penetration losses when passing through the carriages of trains or cars [
2]. Consequently, many design difficulties, such as channel modelings, Doppler effect compensations, and time-varying channel estimations, arise as a result of these unique traits [
2,
3,
4,
5].
Given this background, fifth-generation cellular systems have already incorporated compensating technologies such as massive multiple-input multiple-output (mMIMO) and millimeter waves (mmWave) [
1,
3,
4]. For the upcoming sixth-generation cellular system, both mMIMO and mmWave have been proven inefficient and unsustainable due to high hardware cost, high energy consumption, and high complexity of computation [
6,
7]. In light of these challenges, recently, reconfigurable intelligent surfaces (RISs) have emerged as a promising technology to leverage these challenges [
6,
7,
8].
Reconfigurable intelligent surfaces, also known as intelligent reflecting surfaces [
8], and large intelligent surfaces [
9], have emerged as an innovative technique that enables control of the propagation electromagnetic environment [
10,
11]. Specifically, ab RIS surface consists of a grid of sub-wavelength passive reflecting elements, which are able to cause an instantaneous controllable phase and/or amplitude shift on the incoming wave [
8]. By doing so, the reflected signal can be reoriented to improve transmission quality [
10].
On the other hand, the Doppler effect is a major challenge for HSC systems with dense data sources [
2]. Recently, there have already been studies that focused on Doppler mitigation using RIS. Basar [
12] discussed the Doppler effect and mitigation in the context of RIS. With the help of RIS, the author investigated the possibility of eliminating or mitigating the multipath fading effect caused by mobile receiver movement. It has been shown that by implementing a real-time tunable RIS, the dramatic changes in signal strength caused by Doppler effects can be mitigated effectively. However, the Doppler shift cannot be compensated for if a direct light-of-sight (LoS) link exists. Björnson et al. [
13] introduced a general time-varying model for wireless communication with a single RIS and derived the received signal expression in the complex baseband communication system. Moreover, using the proposed model, they proved that if an uncontrollable direct channel link exists, it is impossible to simultaneously maximize the signal-to-noise ratio (SNR) and compensate for the Doppler shifts introduced by the RIS. This result matches well with that of [
12]. Based on the model in [
13], Matthiesen et al. [
14] utilized predictable information such as mobility patterns to design RIS phase shift sets in advance to reduce the complexity of beamforming.
The above works [
12,
13,
14] commonly assume perfect RIS hardware and transceivers. Unfortunately, in reality, inherent hardware impairments (HWI) such as phase noises, imperfect channel state information (CSI), and quantization errors, which limit system performances, have to be considered due to the imperfections of the electronic devices [
15,
16,
17,
18]. In [
17], the authors considered the HWI that appears at both RIS and the signal transceivers. Then, closed-form expressions for the average achievable rate (ACR) and the RIS utility were derived; the HWI results in reductions of ACR and RIS utility in more reflecting elements. In [
18], the authors analyzed the spectral and energy efficiency of RIS-assisted multiple-input single-output downlink systems with HWI. It is shown that the spectral efficiency (SE) is limited due to HWI even when the numbers of transceiver antennas and RIS elements grow infinitely large, which is in contrast with the conventional case with ideal hardware. Furthermore, we [
19] revealed that HWI on the RIS has no impact on Doppler shift and spread, but would increase delay spread.
Note that [
17,
18,
19] mainly studied single-RIS scenarios. Recently, multiple RISs system has been studied in terms of performance enhancement [
20,
21,
22,
23]. In [
20], the authors formulated and tackled a novel RIS-user/BS association problem that aims to optimally balance the passive beamforming gains from all RISs among different BS-user communication links. In [
21], the authors introduced a new RIS-aided communication system, where multiple RISs assist communication between a multi-antenna base station (BS) and a remote single-antenna user by multi-hop signal reflection. In [
22], a novel hybrid beamforming scheme for multi-hop RIS-assisted communication is proposed in order to improve the coverage range at THz-band frequencies. Moreover, the authors of [
23] studied the statistical characterization and modeling of distributed multi-RIS-assisted communication systems. However, Refs. [
20,
21,
22,
23] do not consider multiple RISs in HSC systems, especially in terms of Doppler mitigation and HWI analysis.
On the other side, real-time positioning information (PI) is essential to an HSC system to ensure successful operation (e.g., collision prevention) [
6,
24]. The trajectory of a train or a car can be sensed or predicated using some techniques such as track circuits [
24], RF tags [
25], odometers [
26], global navigation satellite systems [
27,
28,
29,
30], and smartphones [
31,
32]. Furthermore, machine learning can also enhance the accuracy of the positioning [
32,
33,
34,
35]. It is noteworthy that trajectory positioning is different from conventional channel estimation since the PI is only related to times, speeds, and locations. However, there are few papers designing the phase shift set of RIS using PI.
Channel estimation for HSC is always very challenging due to time-varying channels [
36]. The estimation process is more costly and inaccurate compared to estimating static/quasi-static channels [
37,
38]. Therefore, the research gap can be summarized as follow. First, although there are some works on Doppler mitigation using RIS in HSC, there is little literature considering the multiple RISs case; Second, it is crucial to study the relationship between Doppler mitigation and HWI on an RIS-assisted system, but there are few papers in this direction; Third, SE analysis is also very necessary when considering HWI on a Doppler-mitigation HSC system with the help of RIS; Fourth, how to reduce the computational complexity and energy consumption of channel estimation for RIS-assisted HSC systems is of great importance.
In light of the research gap above, the motivation of this paper is that, instead of using conventional channel estimation techniques, PI (e.g., vehicle positions) could be fully utilized to design the phase shift set in real-time. In particular, the system model proposed in this paper is only related to transmission distance and time; thus, using a well-designed phase shift set, an RIS can reconfigure the reflected phase to align all channels to successfully maximize the received power. The benefit of the proposed scheme is that traditional channel estimations are not needed. Therefore, it can be easily implemented and is more energy-efficient than other conventional RIS-assisted systems.
In this paper, we explore the capacity for Doppler mitigation and received power maximization of applying PI-based multiple RISs with HWI (The simulation results can be reproduced using code available at:
https://github.com/ken0225/Multi-RIS-Doppler-Mitigation-Hardware-Impairments, accessed on 8 July 2022). In order to elaborate, in
Table 1, we explicitly contrast our contributions to the state-of-the-art RIS-assisted high-speed communications. In particular, Ref. [
12] considered RIS with perfect CSI, which is impractical. Moreover, although the multi-RIS scenario is considered, each RIS contains just a few elements in [
12], which cannot obtain enough beamforming gains. Ref. [
14] does not consider multiple RISs, HWI, or SE analysis, which we already considered in our manuscript. Besides, the channel estimation methods in [
37,
38] are all traditionally piloted-based. Although these methods may obtain promising channel parameters, the estimation complexity cannot be ignored. To this end, we utilize PI to replace CSI to obtain the phase shift set in real time, which is less computationally demanding. The main contributions of this paper are as follows.
We model the HWI at multiple RISs as random phase shift errors, and the HWI at the transceiver as additive distortion noises. Based on the modeling of the HWI, we then propose a PI-based time-varying system model for multi-RIS-assisted communications. Furthermore, we also generalize our LoS channel model to the Rician case;
Using the real-time PI, we design and compare different phase shift sets for multiple RISs, and obtain the phase shift set that can maximize SE, remove Doppler spread, and keep delay spread at a very low level, even with random trajectory errors. We reveal that the RIS HWI can increase delay spread, but has no impact on Doppler shift and spread;
We compare the performance of different numbers of RISs in terms of SE and delay spread. We reveal that the delay spread grows with the increasing number of RIS. Therefore, the tradeoff between SE and delay spread should be considered when designing a multi-RIS system. We also mathematically derive the closed-form expression of the SE with respect to the proposed system;
Detailed simulations are provided to validate the effectiveness and robustness of the proposed system in this paper. In particular, the numerical results reveal that our system is still effective in the Rician channel. Furthermore, the PI-based phase shift set is robust even if the random positioning error exists.
The rest of this article is organized as follows. In
Section 2, we present a PI-based time-varying multi-RIS-assisted Doppler mitigation communication system model with HWI. Based on the proposed system, in
Section 3 we define the expressions for Doppler spread, Doppler shift, and delay spread. In
Section 4, we design and compare different phase shift optimization strategies on multiple RISs. In
Section 5, we obtain the expression of SE. In
Section 6, we provide numerical simulations and discussions. In
Section 7, we conclude this paper. In addition, the summary of notations is listed in
Table 2.
2. System Model
We consider a downlink transmission model where
K non-cooperative RISs are deployed to assist the communication from a BS to a high-speed mobile vehicle with a constant speed
v meters/second (m/s). There are no information exchanges between any two non-cooperative RISs; therefore, multi-hop signal reflections [
20,
21] are omitted. All the RISs are identical, and each has
isotropic elements, where
M and
N are the row and column numbers of the RIS. In addition, consider the far-field scenario; the spacing of any two RISs is large enough that the interference can be neglected. The BS and the vehicle are both equipped with a single isotropic antenna with the positions
and
, respectively.
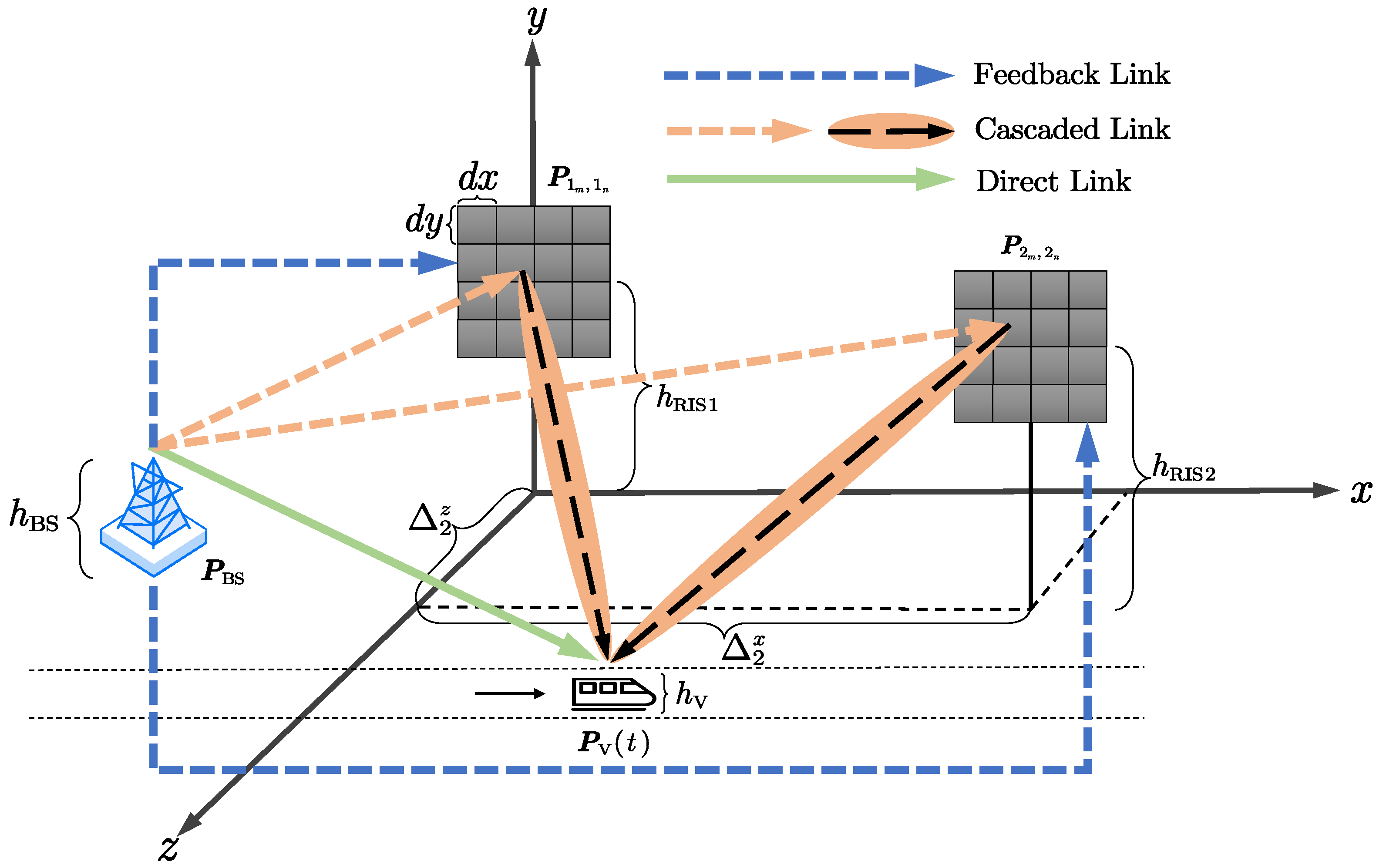
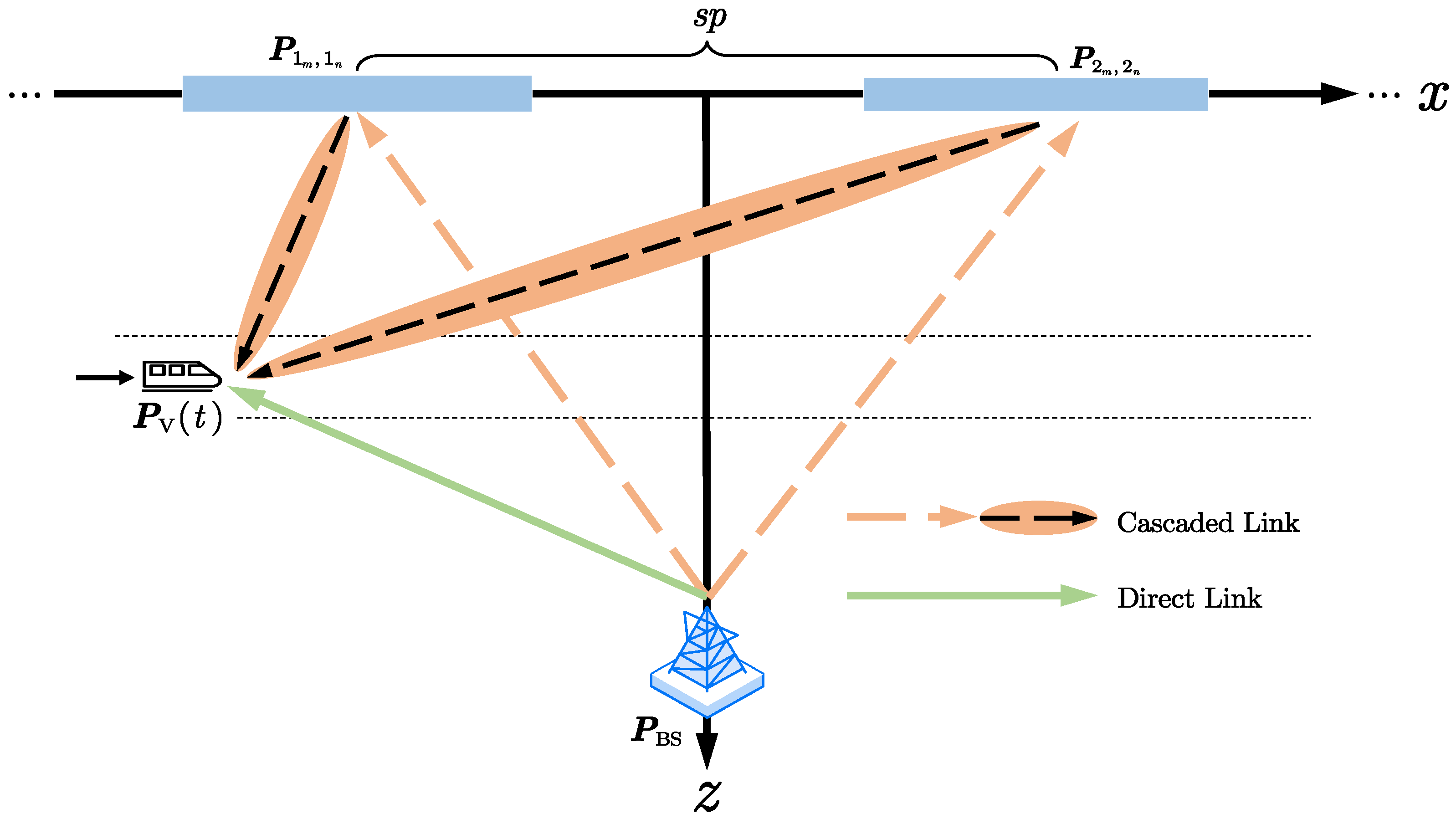
Figure 1 shows the proposed system with
RISs; each of them is a uniform planar array that is placed on a rectangular grid spaced
and
apart in parallel to the
plane in a three-dimensional Cartesian coordinate system. The heights of the
i-th RIS, the BS, and the vehicle are
,
, and
, respectively. The PI (e.g., real-time positions) is sent to the BS through existing positioning techniques (e.g., global positioning system [
28]). The RIS phase shift set is then designed and sent to all RISs. A summary of the notations of system model coefficients is provided in
Table 3.
Therefore, the position column vector of the
-th element on the
i-th RIS is
where
and
,
with
and
is obtained in the same way as
. The
x and
z coordinates of the center for the
i-th RIS are
and
, respectively. It is noteworthy that we assume the reflecting sides of all RISs always orient to the vehicle [
21].
2.1. System Model without Hardware Impairments
Consider that the direct and cascaded channels are all LoS, and the BS, the
-th element of the
i-th RIS, and the vehicle are located at
,
, and
, respectively. Then, the direct link gain is given as [
39]
where
is the BS antenna gain when the observation point is the vehicle antenna and
is the vehicle antenna gain when the observation point is the BS antenna.
denotes the wavelength of the signal and
is the Euclidean distance between the BS and the vehicle at time
t. Since the BS and the vehicle antennas are all isotropic, then
Moreover, the direct link time delay can be obtained as
where
is the speed of light. Therefore, the received signal from direct link at time
t can be obtained as
where
is the fixed transmit power and
is the transmit signal with
. Furthermore, the cascaded link gain by the
-th element of the
i-th RIS at time
t can be obtained as
where
is the gain of the
-th element of the
i-th RIS when the observation point is the BS antenna,
is the gain of BS antenna when the observation point is the
-th element of the
i-th RIS,
is the gain of the
-th element of the
i-th RIS when the observation point is the vehicle antenna, and
is the gain of the vehicle antenna when the observation point is the
-th element of the
i-th RIS. Furthermore,
and
are the distances from the BS to the element and from the element to the vehicle, respectively. Since the RISs and transceiver are assumed to be isotropic in this paper, we have
Furthermore, the cascaded link time delay for the
-th element of the
i-th RIS can be calculated as
Note that
is the distance from the BS to the
-th element of the
i-th RIS. It is fixed, since the BS and all RISs are static. Consequently, the received signal from the cascaded link by the
-th element of the
i-th RIS can be obtained as
where
is the controllable phase shift caused by the
-th element of the
i-th RIS at time
t and
is carrier frequency. Note that we consider all the elements as losses diffuse reflectors; thus, the amplitude of
is always 1. Let
and
be the phase parts of the direct and cascaded links, respectively; thus, the corresponding complex baseband received signal without HWI is
where
w is a white Gaussian noise process with power spectral density
.
2.2. System Model with Hardware Impairments
Based on the model (
11), we then obtain the system model expression with HWI. In this paper, two kinds of HWI are considered, i.e., RIS HWI and transceiver HWI. The RIS HWI mainly includes intrinsic hardware imperfections, imperfect CSI, and quantization errors of the RIS hardware [
16,
17,
40,
41]. Note that the phase estimation error can be modeled as a zero-mean von Mises variable [
41]. However, since the RIS HWI in this paper contains three types of error, we model it as
[
17], where
. It is noteworthy that
is independent and identically distributed at time
t. Accordingly,
. The transceiver HWI includes HWI in the transmitter and receiver. More precisely, the transceiver HWI refers to the distortion noises generated by the transmitter due to inaccurate modeling, which can be modeled as
, where
is equal to a proportionality coefficient
times transmit power [
16,
17]. Similarly, the received distortion noises generated by the receiver at time
t can also be modeled as
, where
is equal to the proportionality coefficient
times received power.
Therefore, the total received signal
can be obtained as
where
and
It is noteworthy that since the proposed model (
12) is only related to the positions of the vehicle at time
t, which are already known at the BS, we regard the PI as the CSI. Therefore, the distances
,
and
are assumed to be already known in the rest of the paper. In addition, we discuss the case when the PI has random errors in
Section 6.4.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}