Three different approaches are applied to simulate the waterjet-propelled ship model. The impeller rotation is considered in the steady MRF model, and the thrust is computed by integrating the forces acting on the waterjet. The self-propulsion point is obtained by modifying the impeller rotational speed until the horizontal force is balanced. To simplify the geometry as much as possible, the impeller and guide vane blades are removed from the body force model, as shown in
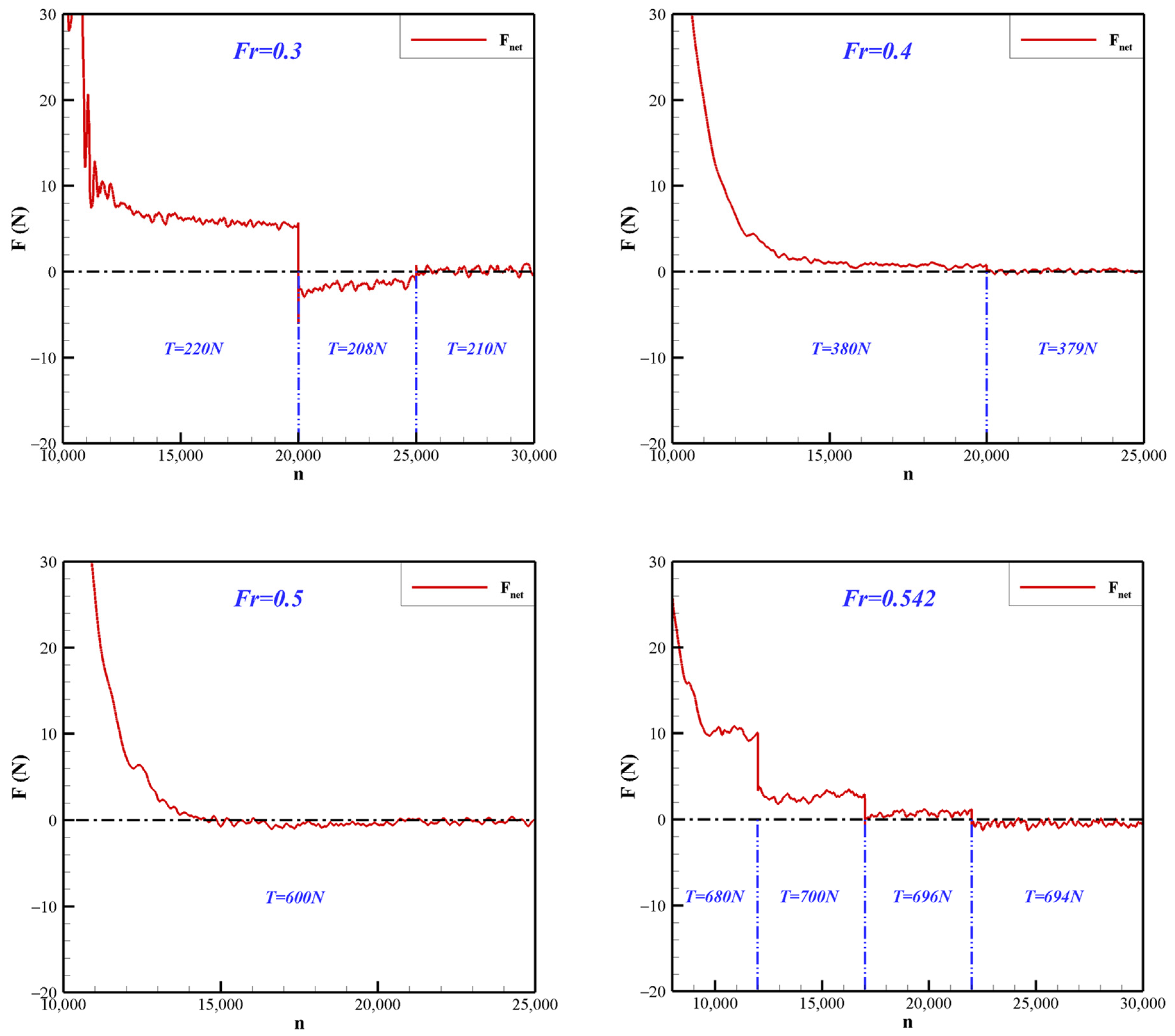
Figure 6. The initial value of the axial body-force is set equal to the axial force acting on the impeller and the guide vanes computed from the MRF model. Then, for a self-propelled ship, this value has to be adjusted repeatedly to achieve resistance/thrust balance. The self-propulsion is calculated at
Fr = 0.3, 0.4, 0.5, 0.542. When the net force of waterjet-propelled ship converges to zero (resistance/thrust balance) in the MRF model, the sliding mesh model is triggered. The time step in the sliding mesh method corresponds to 1° rotation of the impeller. The three methods have the same mesh number in hull region, about 7.22 million. As for the waterjet system, the mesh number in body-force model is about 1.49 million, far smaller than 5.28 million in the MRF and sliding mesh models.
3.2.3. Internal Ingested Flow of the Control Volume
Figure 13 displays streamlines tracked upstream from the waterjet pump, which intersects with the incoming boundary layer at station 1a. After that, a program is developed using the MATLAB language to obtain the shape and flow variables of the capture area.
Figure 14 exhibits the velocity distributions in the capture area with the MRF model and body-force model at
Fr = 0.542, showing the accordance of the axial velocity distribution and the geometry of the capture area obtained by the two models.
Figure 15 shows the velocity profiles of the boundary layer at waterjet centerline of the bare hull and the waterjet self-propelled ship using the MRF model and body-force model. The axial velocity at the waterjet centerline of the self-propelled ship is larger than that of the bare hull, due to the suction of the waterjet system. The velocity profiles of the boundary layer at the waterjet centerline of the self-propelled ship with the MRF model and body-force model exhibit little difference.
Similar to the effective wake field on a propeller, the effective wake fraction
is calculated to study the effect of the waterjet suction on the hull distorted flow at station 1a:
where
is the ship velocity,
is the capture area, and
is the axial velocity of
.
The momentum velocity coefficient
is defined to quantitatively describe the influence of the hull on the ingested flow as follows:
where
is the capture area,
is the axial velocity of
, and
is the ship velocity.
The effective wake fraction
and momentum velocity coefficient
of the capture area with the MRF model and body-force model are summarized in
Table 5. It shows that the non-uniformity of the capture area with the body-force model is slightly smaller than that with the MRF model. With the increase in speed, the result error between the two models becomes larger, but the relative errors are less than 0.6%.
Figure 16 compares the non-dimensional axial velocity distribution with the MRF model and body-force model at station 3. In general, the velocity distributions with the two models on the inflow plane are similar. The high-speed flow is distributed near the bottom dead center, and the velocity in the lower half disk is higher than that in the upper half disk.
Figure 17 exhibits the non-dimensional axial velocity distribution on the nozzle section with the MRF model and body-force model. The value
is a momentum non-uniformity factor [
13], related to the experimental procedure for determining momentum at station 6:
where
is the average velocity of the nozzle section.
is unity for uniform flow, and it deviates from unity as the flow field varies.
Table 6 lists the results of nozzle velocity ratio
NVR (
), flow rate of waterjet
and momentum non-uniformity factor
at station 6 with the MRF model and body-force model. Compared with the MRF model, the momentum non-uniformity factor at station 6 with the body-force model is slightly smaller, due to the simplification of the impeller and guide vanes. At the self-propulsion point, the nozzle velocity ratio and flow rate of waterjet with the body-force model are also slightly smaller. Additionally, the relative errors of the three variables with the two models are less than 1.2%.
Figure 18 presents the detailed flow characteristics at longitudinal section inside the waterjet with the MRF model and body-force model under
Fr = 0.542 (design speed). The axial velocity distribution ahead the pump inflow plane and behind the nozzle section with the two models are similar. However, there is a significant difference in the axial velocity distribution between station 3 and station 6, because the impeller and guide vanes are removed in the body-force model.
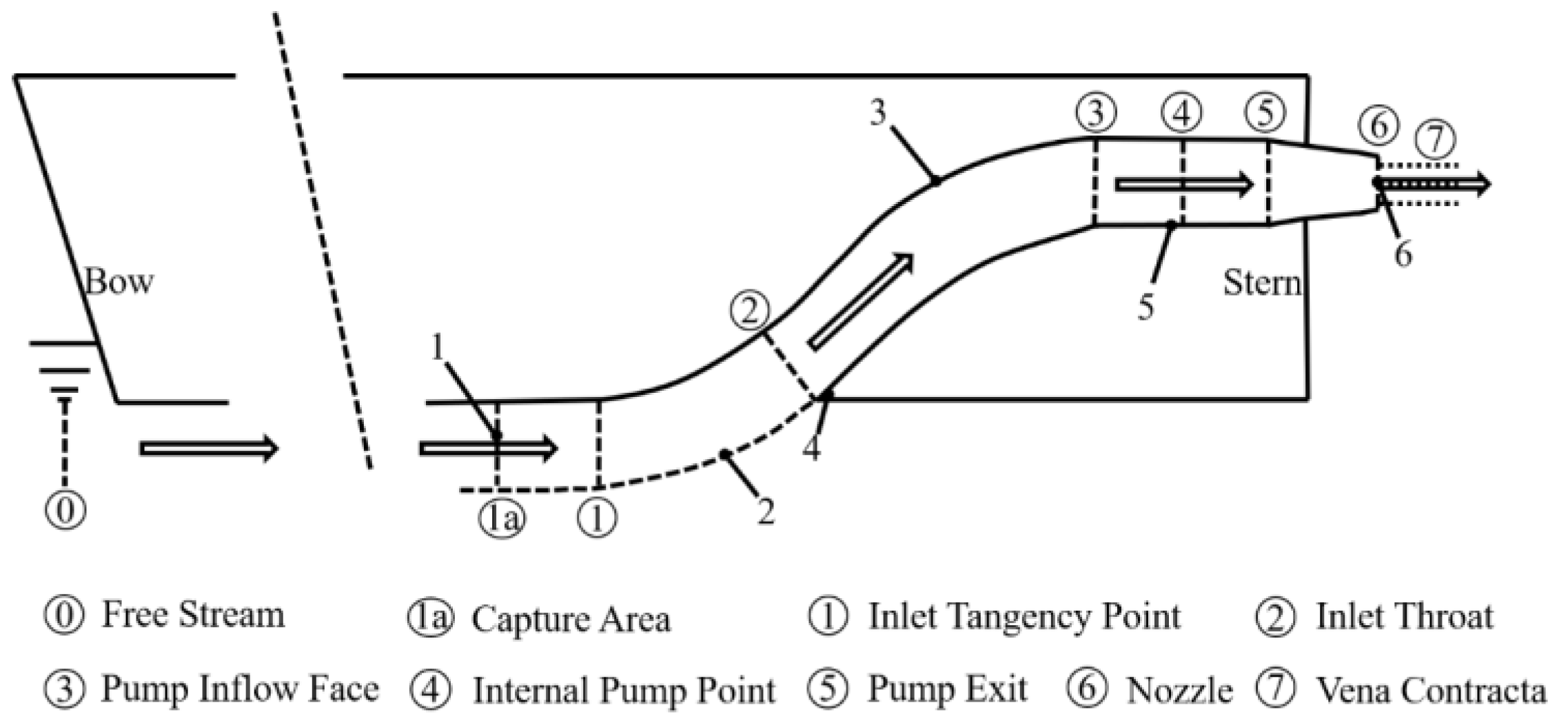
Based on the recommended procedures and guidelines for propulsive performance predictions [
4], a control volume is applied to analyze the performance of the waterjet system using the momentum flux method, as shown in
Figure 1. Surface 1 is the imaginary capture area. Surface 2 is the imaginary boundary of inlet stream tube, which separates the internal ingested flow of the control volume from the external flow field. Surface 3 is the physical boundary of the waterjet system. Surface 4 is the surface between the stagnation lines and merge lines of the hull and duct. Surface 6 is the nozzle section at station 6.
The horizontal component of the gross thrust vector can be obtained by writing the horizontal momentum flux balance over the control volume:
where
is the density of the fluid,
is the velocity vector and
is the unit vector normal to the control surface pointing outward of the control volume [
11].
The net thrust is defined as the force vector acting upon the internal material boundary of waterjet system, which acts directly on the hull to balance the resistance. The horizontal component of the net thrust is abbreviated as
and defined as follows:
where
is the horizontal component of the surface stresses and
is the horizontal component of the pump force per unit mass.
For a waterjet-driven hull, the thrust deduction fraction
is not the same as the conventional thrust deduction fraction employed in propeller/hull interaction theory. The thrust deduction fraction relates the resistance of the bare hull to the gross thrust and is defined as follows:
Similarly to the conventional thrust deduction fraction employed in propeller/hull interaction theory, the resistance increment fraction
based on the bare hull resistance and the net thrust of the waterjet system is defined as follows:
Usually, at the self-propulsion point, the net thrust of waterjet system is equal to the resistance of the self-propelled hull. Therefore, the resistance increment fraction reflects the change in the resistance of the waterjet-propelled hull compared to the bare hull resistance.
In order to relate the net thrust to the gross thrust, the jet system thrust deduction fraction
is defined as follows (Eslamdoost, 2014):
Thus, the relationship among the thrust deduction fraction
, resistance increment fraction
and jet system thrust deduction fraction
is
Table 7 shows the results of
,
and
with the MRF model and body-force model. With the increase in speed, the resistance increment fraction
decreases, and the jet system thrust deduction fraction
increases, which is similar to the results for
Fr < 0.55 by Guo et al. [
32]. Additionally, the relative errors of
,
and
between the two models are less than 1.9%.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}