1. Introduction
Lithium-ion batteries have become the most promising energy solution by virtue of their high energy density, long life cycle and low self-discharge rate [
1]. However, they are extremely intolerant of over-charging and over-discharging and prone to fire and even explosion in the case of poor monitoring. Clearly, it is essential to monitor the current, voltage and temperature and estimate the state of charge (
SOC) and the state of health (SOH) so as to ensure battery safety and efficiency [
2]. However, the direct measurement of the
SOC is impractical; it usually needs to be estimated based on observable data such as current and voltage. The most commonly used
SOC estimation method is the model-based method, which is usually implemented in two steps: firstly establishing a model for the battery and then using an adaptive filter, such as the Kalman filter and its variants [
3,
4], to estimate the
SOC. Consequently, the battery model is the premise of
SOC estimation. Therefore, it is requisite to develop an appropriate model which can precisely describe the dynamic process of the battery and reflect the relationship between the
SOC and the observable data so as to improve
SOC estimation performance.
To date, considerable research efforts have been made on battery models, which can be in general divided into three main categories: the black-box model, electrochemical model and equivalent circuit model (ECM). Firstly, the black-box model usually employs artificial neural networks [
5] or support vector machines [
6] to learn the nonlinear relationship between the battery input and output. Chemali et al. [
7] introduced a method employing a recurrent neural network with long short-term memory (LSTM-RNN) to perform correct
SOC estimation for the lithium-ion battery. Chehade et al. [
8] combined the advantages of LSTM and the Gaussian process and achieved accurate estimates. With a large amount of data, this method is able to estimate
SOC without using any physical models or filters. However, since the model parameters have no explicit physical meaning, they require a large amount of data under different experimental conditions to train the model, which puts a heavy demand on the quality of the sample data as well as the computation capability [
9,
10]. The electrochemical model needs to develop a detailed and complex model [
11,
12] to describe the internal chemical reaction. It involves a variety of chemical parameters, which requires a great amount of tedious and expensive chemical experiments. As a result, this model cannot realize real-time online detection. Compared with the electrochemical model, the ECMs have been widely applied, which can mimic the electric behavior of the battery through simple circuit elements, including a serial resistor, one or more resistor-capacitor (RC) circuits and an ideal voltage source. Therefore, only a few parameters are required in ECMs. By appropriately adjusting the model structure, it is easy to reach a balance between accuracy and complexity. Hu et al. [
13] compared 12 commonly used ECMs in terms of accuracy, robustness and complexity and concluded that the first-order RC model is the most suitable one. Furthermore, as the RC order increases, the model accuracy improves, whereas the computational efficiency decreases.
Related research [
14,
15] shows that the diffusion effect in lithium-ion batteries is more appropriate to be described based on fractional order. This fact facilitated the rapid development of the fractional-order model (FOM) of the battery. One improvement of the ECMs was to replace the ideal capacitor with a constant phase element (CPE) in the first-order RC model to more accurately simulate the behaviors of double layers on the electrode [
16]. It was found that the FOM with one CPE is equivalent to an integer-order model (IOM) which has five RC networks [
17]. To further improve the accuracy, a Warburg component (W) was added in series with the polarization resistor [
18] or the internal ohmic resistor [
19] to describe the battery dynamic characteristics more properly. Moreover, Wang et al. [
20] proposed an FOM with two CPEs, which exhibited more robustness to uncertainties.
In addition to the accurate modeling of the battery, another key challenge is model parameter identification. In general, precise model parameters are not only crucial for
SOC estimation but they can also reflect the battery SOH which is usually defined by the internal resistance or the capacity. For the IOMs of ECM, a typical method is offline identification based on the HPPC test which, however, has poor accuracy under dynamic operating conditions. Therefore, plenty of online parameter identification algorithms have been put forward, such as the recursive least squares (RLS) [
21], RLS with forgetting factors (FFRLS) [
22], extended Kalman filters (EKF) [
23] and universal adaptive stabilizers (UAS) [
24]. Moreover, some researchers have designed an online parameter identification method considering multiple time scales according to the fast and slow change characteristics of the model parameters [
25]. Nevertheless, these methods are not adequate for FOM models. A heuristic optimization algorithm is one feasible solution. For example, the genetic algorithm (GA) was adopted to obtain the order of the fractional element and other model parameters [
26,
27,
28]. Moreover, Su et al. [
29] used the particle swarm optimization (PSO) algorithm to identify the parameters of a fractional-order two-RC circuit model. Zhang et al. [
30] proposed a time-frequency-domain-based fractional-order model parameter identification method using a genetic particle swarm optimization algorithm. However, the naive forms of these algorithms are prone to fall into local optimal solutions. To account for this weakness, quantum behavior has been combined with intelligent algorithms, such as the PSO [
31], artificial bee colony algorithm [
32] and bacterial foraging algorithm [
33].
Recently, to further improve the solution accuracy, a sparrow search algorithm (SSA) was proposed [
34]. However, like PSO and GA, it may also be trapped into local optimum although the global search ability is excellent. In addition, the SSA converges slowly because a random wandering strategy is adopted when there are no neighboring peers around an individual sparrow. To address these issues, many studies have been carried out. Zhang et al. [
35] proposed an improved SSA which applied the logistic chaotic mapping and adaptive parameters to the sparrow position initialization and update and obtained good configuration parameters. Zhu et al. [
36] added an adaptive learning rate to accelerate the process and avoid the inefficient random wandering. Furthermore, levy flight strategies [
37,
38] and Gaussian variation strategies [
39] have been applied to improve the ability of avoiding getting stuck in a local optimal solution.
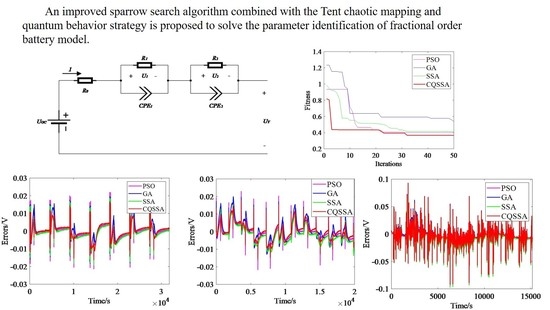
In this study, we adopt a fractional-order model with two CPEs as a battery model and formulate the model parameter identification problem as an optimization problem. The chaotic mapping and quantum behavior strategies are combined with the SSA to minimize the sum of squared errors (SSE) between the measured and estimated voltages of the model. Experiments are performed under three different operating conditions, namely, the hybrid pulsed power characteristic test (HPPC), pulsed discharge test (PULSE) and urban dynamometer driving schedule test (UDDS). Compared with PSO, GA, GWO [
40], DOA [
41] and SSA, the proposed chaotic quantum sparrow search algorithm (CQSSA) exhibits superior performance in accuracy and adaptability.
The main contributions of this study are as follows:
- (1)
A novel chaotic quantum sparrow search algorithm (CQSSA) is proposed, which uses the quantum behavior strategy to improve the intelligence of the algorithm and the ability to jump out of the local optimum and adopts Gaussian variation to enhance the population diversity. Moreover, it employs the Tent chaotic mapping to initialize the sparrow population to improve the diversity of the initial population and accelerate the convergence rate.
- (2)
The proposed CQSSA algorithm is applied to realize the parameter identification of the fractional-order model of the lithium-ion battery based on the HPPC experimental data. Simulation results indicate that CQSSA can identify the model parameters much more accurately than the GA, PSO, GWO, DOA and SSA algorithms.
- (3)
These parameters are used in the pulsed discharge test and UDDS test to verify the adaptability of the CQSSA algorithm. Simulation results show that the parameters obtained by CQSSA also perform best under the pulsed discharge test and UDDS test, illustrating the good adaptability of the proposed algorithm under different operating conditions.
The remainder is organized as follows.
Section 2 introduces the sparrow search algorithm. A series of improvements is proposed in
Section 3, and the performance verification is made using six test functions. In
Section 4, the experimental results and analysis for battery parameter identification are presented. The last section provides the conclusion.
3. Sparrow Search Optimization Algorithm
By studying the group predation of the sparrow species, Xue [
34] proposed a sparrow search algorithm (SSA) which abstracts the flock predation behavior of the sparrows into a producer-follower model.
The basic idea of the SSA algorithm is as follows. It divides the individuals in the sparrow population into two categories, producers and followers, which take on different tasks in the predation behavior. Usually, producers are responsible for identifying and discovering abundant food sources and providing feeding directions for followers. The follower remains in the same direction as the producer with the best position, and some followers monitor the positions of the producers and compete with other followers for food to improve their own predation rates. The ratio of the producers to followers remains constant throughout the sparrow population, but each sparrow has the potential to become a producer depending on its fitness value.
Following the behavior of the sparrows in predation and escape from predators, a mathematical model is established. Assuming there exists a population of sparrows with population size
N, the position
X of the sparrow population is represented as:
where each row of the matrix represents the position of a sparrow.
Xi,j indicates the position of the
jth (
j = 1,2,…,
D) dimension for the
ith (
i = 1,2,…,
N) sparrow. Each individual sparrow represents a feasible solution.
The producers, which generally occupy 10–20% of the entire sparrow population, need to search for food with full freedom in the search space and lead the entire population to forage. Therefore, the producers play a crucial role in the guarantee of global optimization performance. Their positions are updated as follows:
where
t denotes the current iteration number,
itermax denotes the maximum iteration number,
α represents a random number uniformly distributed between (0, 1],
Q is also a random number that follows the standard normal distribution and
L stands for an all-one matrix.
ST denotes the safety threshold and
ALV denotes the alert value. An alert value less than the safety threshold means that there is no predator near this location, and the producers can conduct an extensive search following this search direction. On the contrary, the producers need to lead the followers to other safe areas.
The follower positions are updated as follows:
where
and
denote the global worst position and best position of the producer.
A is a matrix of size 1
D whose elements are randomly assigned with 1 or −1 and
A+ indicates the additive inverse, which can be defined as
. When
, this follower has a low fitness value. It is largely hungry and may compete and find food more actively, while the rest of the followers are monitoring the position of the producer and competing for food.
In addition, 10–20% of sparrows in the population take charge of early warning. When they become aware of a dangerous situation, the locations of these sparrows are updated as:
where
denotes the global best position,
β and
K represent the step control parameters of the direction of movement, which can be any number between [−1, 1],
represents a small positive constant used to avoid dividing by zero,
is the fitness value of sparrow
i,
denotes the current optimal fitness value and
denotes the current worst fitness value. If
, the current sparrow will move toward the position of the producer when it realizes the danger. If they are equal, it means the current sparrow is already at the middle of the population and it will approach the other sparrows when it realizes the danger.
4. Improvements on the Sparrow Search Algorithm
To enhance the intelligence of the population evolution and improve the overall performance of the algorithm, a chaotic quantum sparrow search algorithm (CQSSA) is proposed in this study. It adopts the Tent chaos mapping to expand the population diversity and uses the quantum behavior and Gaussian variation strategy to intelligentize the motion trajectory of the population’s individuals and improve global search capability while effectively avoiding getting trapped in a local optimal solution.
4.1. Quantum Behavior Improvement Strategies
In recent years, quantum mechanics has made great progress in both theoretical research and engineering applications. Many studies have been inspired by the behavior and properties of quantum, including algorithm design [
44,
45] and circuit quantum electrodynamics system design [
46]. In [
47,
48], the quantum behavior improvement strategy inspired by the Delta potential well model in quantum mechanics was adopted to improve the PSO algorithm to extend the search range of the particles. It uses the bound states to describe the aggregation of particles in quantum space, in which the particles can appear at any space point with a certain probability density and can be searched throughout the feasible solution space without dispersion to infinity. As a result, combining the quantum behavioral improvement strategy with SSA can increase the possibilities of the foraging behavior of the sparrows and enhance the intelligence of the group search behavior.
Mathematically, based on quantum Delta potential well theory, the iterative update of the individual sparrow position can be obtained as:
where
i denotes the
ith individual,
j denotes the
jth dimension of the solution and
t represents the time instant.
pi,jt denotes the center of the identified potential well, to which the individual converges in probability.
Li,jtdenotes the characteristic length of the Delta potential well.
ui,jt is a random variable uniformly distributed on [0, 1].
First, the characteristic length of the Delta potential well (
Li,jt) is evaluated as:
where
mbestjt is the average best position of the individual and
α is the contraction-expansion coefficient of the current iteration. An efficient method to set α is to decrease the value of α linearly during the search [
49]. That is,
where
and
are the boundary values of the shrinkage-dilation coefficient, which generally take on values of 1 and 0.5, and
pbesti,jt denotes the optimal position of the individual from the beginning to the current iteration.
Next, the center of the identified potential well
is expressed as a random point of attraction between the global optimal position
gbestjt and the individual optimal position
pbesti,jt and obtained as:
where
is a random variable between [0, 1].
Finally, substituting (15) and (18) into (14), the final sparrow position is updated as
4.2. Tent Chaotic Mapping
Due to the merit of the unification of randomness and ergodicity, the Tent chaotic mapping [
50,
51] can enhance the population variability during the initialization. Therefore, to improve the population quality, the Tent chaotic mapping is applied to initialize the SSA algorithm.
The process of sparrow population initialization using the Tent chaotic mapping method is as follows:
Step 1: Generate the initial value of chaos .
Step 2: Adding a random number to the Tent mapping expression to eliminate the effect of small periodic points [
52],
N k-dimensional chaotic variables can be generated as
where
N is the number of sparrows and rand (0, 1) is a random number uniformly distributed in the range [0, 1].
Step 3: Map the chaotic variables to the solution space so as to achieve the population initialization using the inverse mapping of the generated chaotic variables, which is
where
Lk and
Hk are the lower and upper bounds of the values of the individual sparrow position, respectively.
4.3. Chaotic Quantum Sparrow Search Algorithm
Combing the above improvement strategies with SSA, the CQSSA algorithm is proposed. The basic idea is as follows. Firstly, the Tent chaotic mapping is used for initialization to generate a more diverse sparrow population to improve the iteration efficiency and enhance the global search capability. Secondly, the Gaussian variation is performed to produce more types of individuals and thus increase the population diversity if the individual optimal solution is smaller than the individual average optimal solution. Moreover, the quantum behavior is employed, which can search throughout the solution space and reduce the probability of getting trapped in the local optimum.
The processing steps are as follows:
Step 1: Initialize the number of iterations itermax, the number of sparrows in the population N and the dimension of the solution space D and determine the upper bounds U and lower bounds L of the parameters.
Step 2: Use the Tent chaos mapping to generate a chaotic sequence and map them to the solution space using an inverse mapping, and then initialize the positions of the sparrow population by (20) and (21).
Step 3: According to the cell model and the objective function (9), calculate the fitness values of sparrows Fitp and compare them with the individual optimal position Xp, global optimal position Xbest, global worst position Xworst as well as the optimal fitness value Fitbest. Then, rank the sparrows according to the fitness value to get better and worse positions among the sparrows.
Step 4: Regard the top 20% of the ranked sparrows as producers. Use (11) to update their positions.
Step 5: Take sparrows other than the producers as followers. Moreover, use (12) to update the positions.
Step 6: Select 20% of sparrows randomly as guard sparrows, whose positions are updated by (13).
Step 7: Calculate the average fitness value of the population FitAve and compare it with the optimal individual fitness value Fitp.
If
Fitp is less than
FitAve, regard the individual within the population and update its position to enhance the population diversity by using Gaussian variation. Gaussian variation applies a random number that obeys a Gaussian distribution to perturb the original position. The Gaussian variation equation is shown as follows:
where
XGaussian is the position after Gaussian variation,
X is the original position and
is a Gaussian distributed random variable.
If Fitp is greater than FitAve, regard the individual as far away from the community and use the quantum behavior by (19), which draws the individual towards a certain position between the individual optimal and global optimal positions.
Then, compare the updated position with the original position and select the best individual for the next iteration.
Step 8: After completing an iteration, calculate the fitness values and update the optimal position Xp, global optimal position Xbest, global worst position Xworst and global optimal fitness value Fitbest of the sparrow individual.
Step 9: Determine whether the current number of iterations reaches the maximum number of iterations. If so, the algorithm ends and the output result is returned; otherwise, return to Step 3.
The algorithmic flow of the CQSSA algorithm is shown in
Figure 2.
4.4. Simulation and Verification
Six benchmark test functions including unimodal and multimodal functions are used to verify the effectiveness of CQSSA by comparing with PSO, GA, GWO, DOA and SSA. This study uses an Intel
®Core™i5 processor and MATLAB 2018a for algorithm verification on Windows 10. The selected test functions are shown in
Table 1.
F1 and F3 are unimodal functions which can reflect the convergence and exploration abilities of the algorithm. F2, F4, F5 and F6 are multimodal functions which have multiple local extreme points which can reflect the local search and global search capabilities of the algorithm.
To ensure the verification accuracy, six algorithms are implemented independently 30 times on each function. The population size is 100. For the PSO algorithm, the learning factors and the inertia coefficient are set as
c1 =
c2 = 1.49618 and
w = 0.7298. For the GA algorithm, the genes are encoded in binary and the roulette method is used to select the genes that enter the next generation. The solution of each dimension is represented by 6 genes, the chromosome length is 6 × Dim, and the mutation and crossover probabilities are set to 0.05 and 0.5, respectively. For GWO, the weight of the location distance of the wolf pack decreases linearly and
r1 and
r2 are random vectors within [0, 1]. For DOA,
β1 is a scaling factor that can change the trajectory of the dingoes and it is a random number uniformly distributed over [−2, 2];
β2 is a random number uniformly generated in the interval [−1, 1]. For SSA, the proportions of producers and guards are both 20%. For CQSSA, the maximum and minimum quantum contraction expansion coefficients are 1.0 and 0.5, respectively. The performance of the six different algorithms under each test function is shown in
Table 2.
For the unimodal function F1, PSO performs worst on this high-dimensional problem, whereas CQSSA has significantly better accuracy and stability than the other five algorithms. For function F2, GA has the best optimization result, followed by CQSSA, and they both significantly outperform the other algorithms. For function F3, CQSSA has the best optimization result. Furthermore, it can be clearly seen that the optimization result of CQSSA is significantly superior to the other algorithms for the multimodal functions F4–F6. It indicates that the proposed CQSSA algorithm performs better in convergence and stability probably due to the good capability of escaping from the local extreme.
The convergence characteristic curves of the six algorithms under the six benchmark functions are shown in
Figure 3. The convergence criterion is the minimum number of iterations to reach the required accuracy or the highest convergence accuracy under the fixed iteration number. Overall, the CQSSA algorithm converges faster and has higher convergence accuracy. Specifically, CQSSA achieves the best value in about 200 iterations in F1, which is much smaller than the other algorithms. For F2, CQSSA also converges to a good fitness value, second only to the GA algorithm. For F3 and F4, the convergence results of PSO, GA, GWO and DOA are comparable and both worse than SSA and CQSSA. Moreover, CQSSA has faster convergence speed and higher convergence accuracy than SSA. For F5, both SSA and CQSSA achieve the best convergence accuracy and GWO and DOA are slightly inferior, while PSO and GA perform the worst. For F6, it can be seen from the convergence curve that although GWO and DOA have the best fitness values at the 200th iteration, they fall into local optimal solutions after that. However, CQSSA finally achieves the best convergence accuracy. Different than F3 and F6, the convergence processes of the CQSSA and SSA are almost the same under F4 and F5. The best convergence results are observed for both. In general, compared to SSA, CQSSA uses an improved strategy to make a more intelligent search and jump out of the local optimal solutions in time. This allows CQSSA to exhibit good convergence accuracy on both unimodal and multimodal test functions in high dimensions.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}