
Active Disturbance Rejection Contouring Control of Robotic Excavators with Output Constraints and Sliding Mode Observer



Abstract
:1. Introduction
2. Problem Formulation
3. SMO Design
4. Control Design
5. Numerical Simulation
5.1. Simulation Setup
5.2. Controller for Comparision
- -
- The ESO-based contouring controller (ESOC): This controller was constructed in our previous work [4] with the ESO to estimate joint velocities and lumped disturbances. The prescribed control performance is only guaranteed for the contouring error. For the remaining tangential and orientation errors, only the proportional-derivative (PD) control law is applied as follows:where and are the derivative and proportional gains, respectively.
- -
- The SMO-based contouring controller (SMOC): This controller has the same structure as the ESO-based controller. However, the ESO is replaced by the SMO to verify the proposed observer.
- -
- The proposed controller: The controller is similar to the SMO-based controller. Nevertheless, the prescribed performance is applied for all the error components. Depending on the priority, the constraint level can be adjusted.
5.3. Simulation Results
5.3.1. Case 1: Horizontal Contour
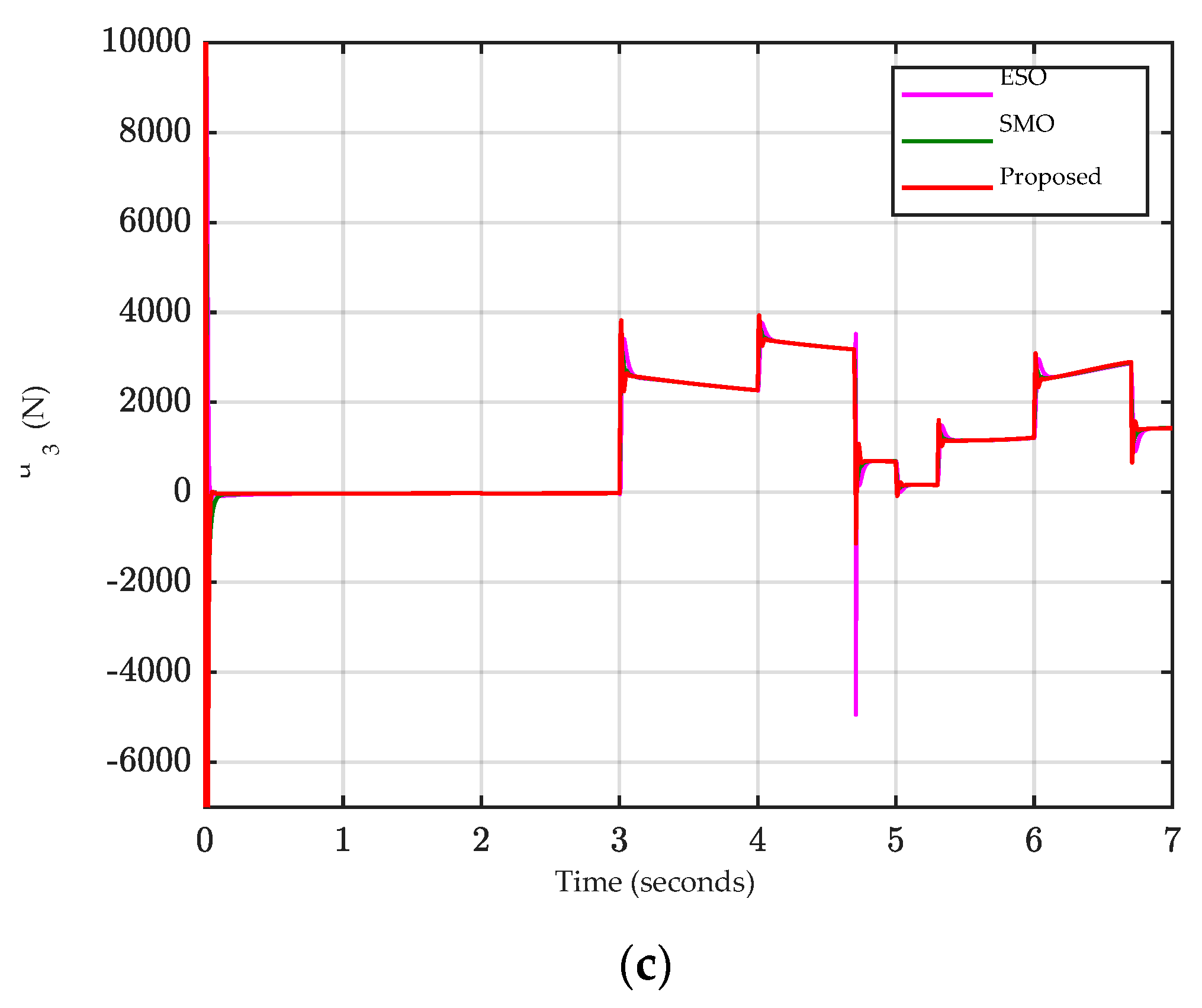
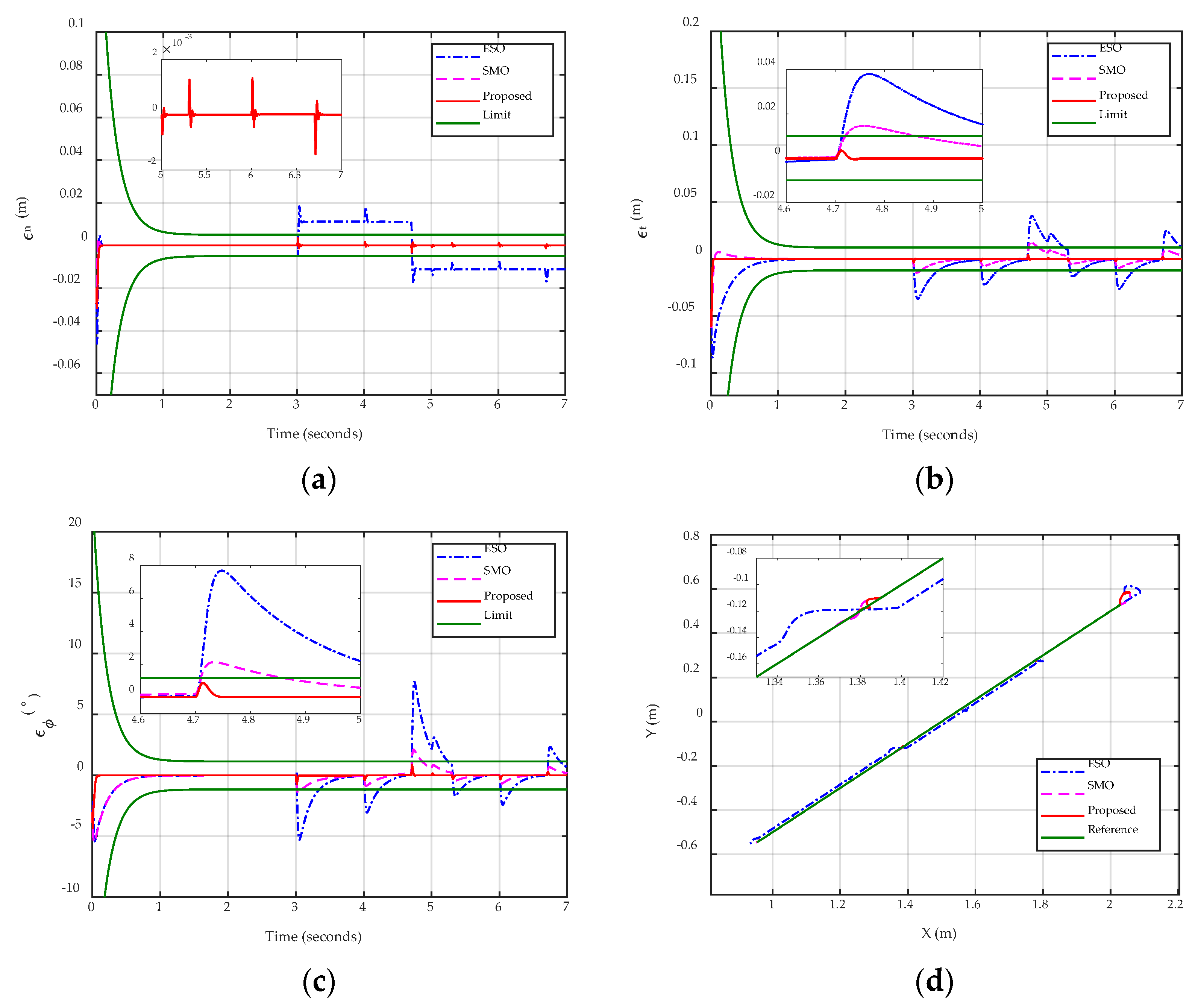
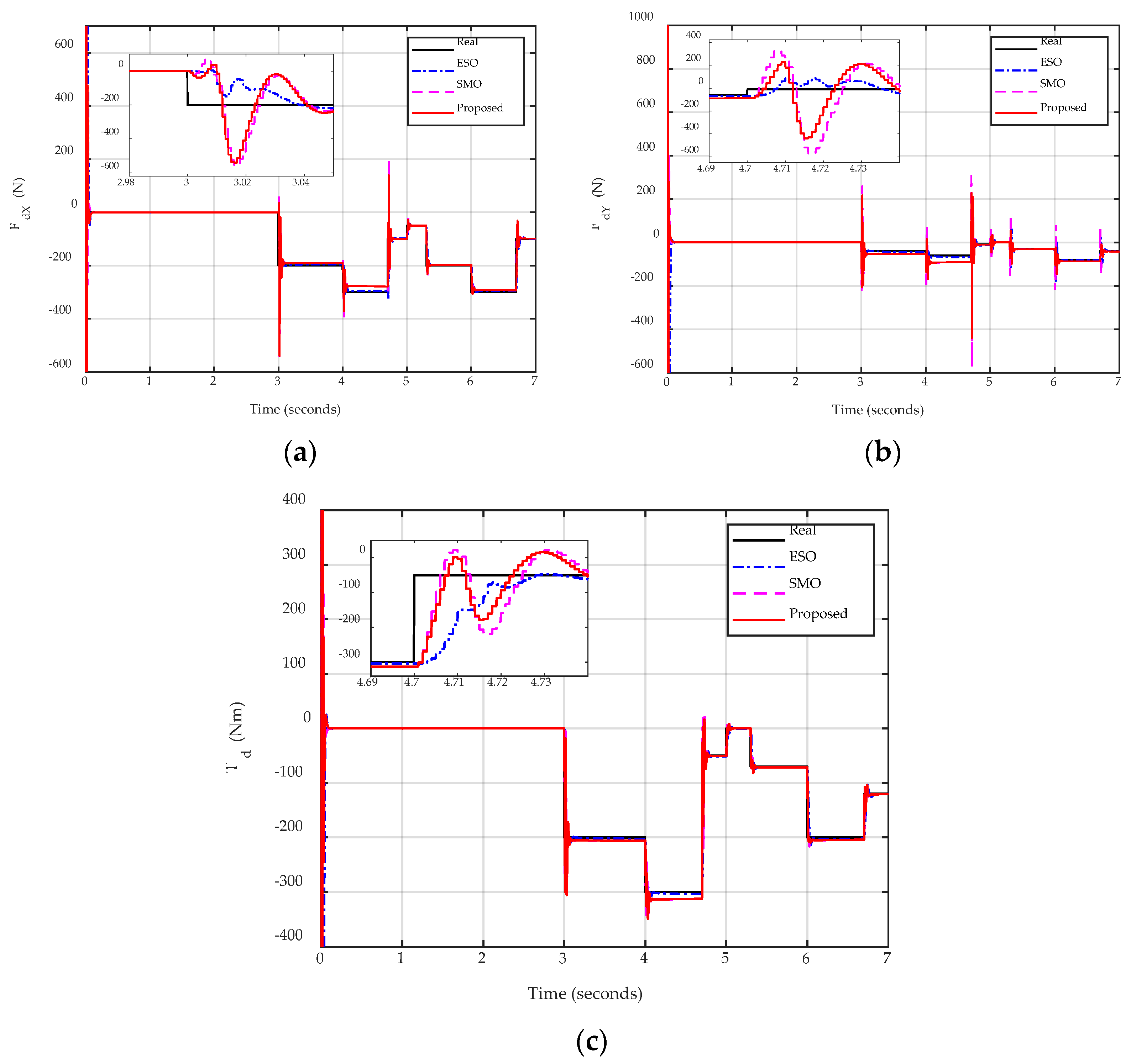
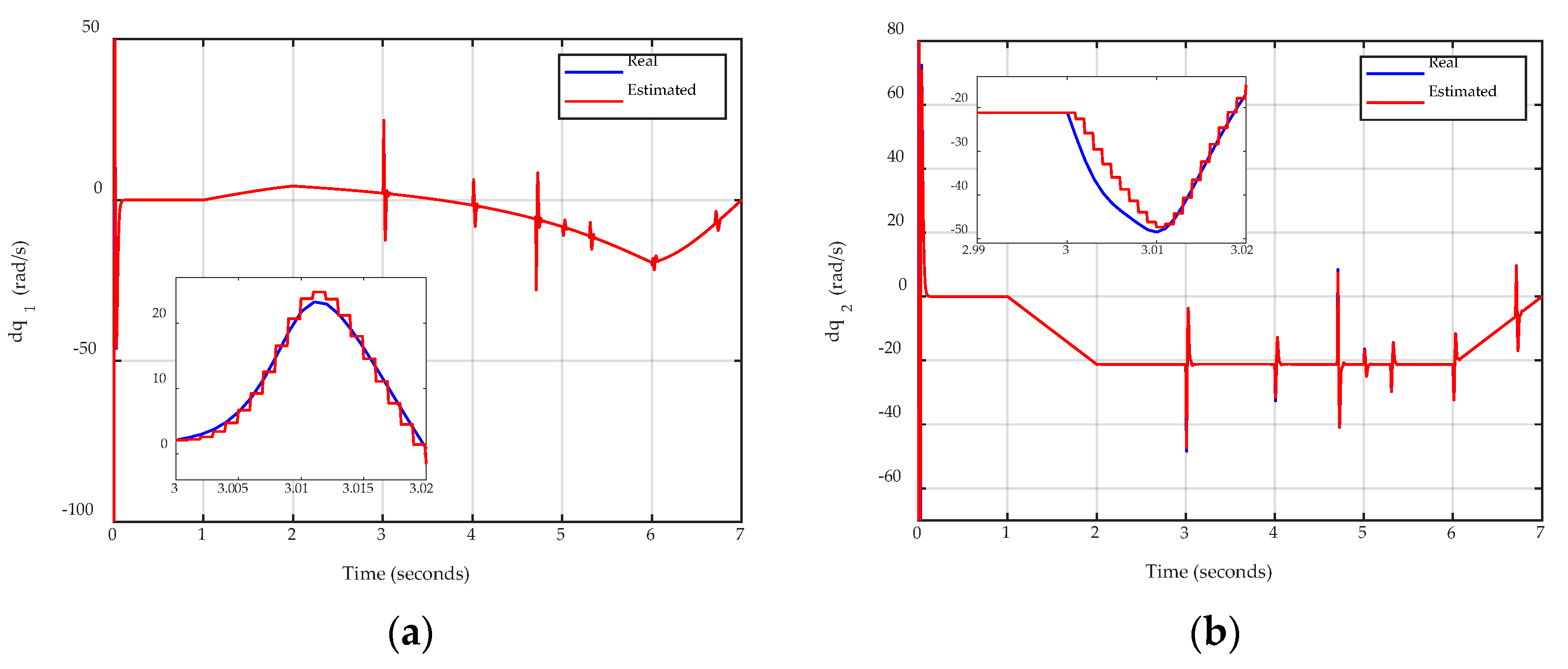
5.3.2. Case 2: Sloped Contour
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Azar EA, K.V. Earthmoving equipment automation: A review of technical advances and future outlook. J. Inf. Technol. Constr. 2017, 22, 247–265. [Google Scholar]
- An Autonoumous Excavator System for Material Loading Tasks. Available online: http://research.baidu.com/Blog/index-view?id=159 (accessed on 15 May 2022).
- Built Robotics Aspires to Automatize Industry. Available online: https://www.constructionequipmentguide.com/built-robotics-aspires-to-automatize-industry/50965 (accessed on 15 May 2022).
- Dao, H.V.; Na, S.; Nguyen, D.G.; Ahn, K.K. High accuracy contouring control of an excavator for surface flattening tasks based on extended state observer and task coordinate frame approach. Autom. Constr. 2021, 130, 103845. [Google Scholar] [CrossRef]
- Xu, J.; Yoon, H.-S. Vision-based estimation of excavator manipulator pose for automated grading control. Autom. Constr. 2019, 98, 122–131. [Google Scholar] [CrossRef]
- Zhang, X.; Qiao, S.; Quan, L.; Ge, L. Velocity and Position Hybrid Control for Excavator Boom Based on Independent Metering System. IEEE Access 2019, 7, 71999–72011. [Google Scholar] [CrossRef]
- Fu, S.; Ren, H.; Lin, T.; Zhou, S.; Chen, Q.; Li, Z. SM-PI Control Strategy of Electric Motor-Pump for Pure Electric Construction Machinery. IEEE Access 2020, 8, 100241–100250. [Google Scholar] [CrossRef]
- Ranjan, P.; Wrat, G.; Bhola, M.; Mishra, S.K.; Das, J. A novel approach for the energy recovery and position control of a hybrid hydraulic excavator. ISA Trans 2020, 99, 387–402. [Google Scholar] [CrossRef] [PubMed]
- Bao, R.; Wang, Q.; Wang, T. Energy-Saving Trajectory Tracking Control of a Multi-Pump Multi-Actuator Hydraulic System. IEEE Access 2020, 8, 179156–179166. [Google Scholar] [CrossRef]
- Bender, F.A.; Goltz, S.; Braunl, T.; Sawodny, O. Modeling and Offset-Free Model Predictive Control of a Hydraulic Mini Excavator. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1682–1694. [Google Scholar] [CrossRef]
- Kim, K.; Kim, M.; Kim, D.; Lee, D. Modeling and velocity-field control of autonomous excavator with main control valve. Automatica 2019, 104, 67–81. [Google Scholar] [CrossRef]
- Sandzimier, R.J.; Asada, H.H. A Data-Driven Approach to Prediction and Optimal Bucket-Filling Control for Autonomous Excavators. IEEE Robot. Autom. Lett. 2020, 5, 2682–2689. [Google Scholar] [CrossRef]
- Egli, P.; Hutter, M. A General Approach for the Automation of Hydraulic Excavator Arms Using Reinforcement Learning. IEEE Robot. Autom. Lett. 2022, 7, 5679–5686. [Google Scholar] [CrossRef]
- Lee, M.; Choi, H.; Kim, C.; Moon, J.; Kim, D.; Lee, D. Precision Motion Control of Robotized Industrial Hydraulic Excavators via Data-Driven Model Inversion. IEEE Robot. Autom. Lett. 2022, 7, 1912–1919. [Google Scholar] [CrossRef]
- Lee, C.S.; Bae, J.; Hong, D. Contour control for leveling work with robotic excavator. Int. J. Precis. Eng. Manuf. 2013, 14, 2055–2060. [Google Scholar] [CrossRef]
- Wang, D.; Zheng, L.; Yu, H.; Zhou, W.; Shao, L. Robotic excavator motion control using a nonlinear proportional-integral controller and cross-coupled pre-compensation. Autom. Constr. 2016, 64, 1–6. [Google Scholar] [CrossRef]
- Sotiropoulos, F.E.; Asada, H.H. Dynamic Modeling of Bucket-Soil Interactions Using Koopman-DFL Lifting Linearization for Model Predictive Contouring Control of Autonomous Excavators. IEEE Robot. Autom. Lett. 2022, 7, 151–158. [Google Scholar] [CrossRef]
- Wang, H. Adaptive Control of Robot Manipulators with Uncertain Kinematics and Dynamics. IEEE Trans. Autom. Control 2017, 62, 948–954. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Jiang, Y.; He, W.; Na, J.; Li, Z.; Xu, B. Adaptive Parameter Estimation and Control Design for Robot Manipulators With Finite-Time Convergence. IEEE Trans. Ind. Electron. 2018, 65, 8112–8123. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Q. Adaptive neural finite-time trajectory tracking control of hydraulic excavators. Proc. Inst. Mech. Eng. I J. Syst. Control Eng. 2018, 232, 909–925. [Google Scholar] [CrossRef]
- He, W.; Huang, B.; Dong, Y.; Li, Z.; Su, C.Y. Adaptive Neural Network Control for Robotic Manipulators With Unknown Deadzone. IEEE Trans. Cybern. 2018, 48, 2670–2682. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S. Adaptive Fuzzy Integral Sliding Mode Control for Robust Fault Tolerant Control of Robot Manipulators with Disturbance Observer. IEEE Trans. Fuzzy Syst. 2020, 29, 1284–1296. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, B.M.; Tatlicioglu, E.; Savran, A.; Alci, M. Self-Adjusting Fuzzy Logic Based Control of Robot Manipulators in Task Space. IEEE Trans. Ind. Electron. 2022, 69, 1620–1629. [Google Scholar] [CrossRef]
- Dinh, T.X.; Thien, T.D.; Anh, T.H.V.; Ahn, K.K. Disturbance Observer Based Finite Time Trajectory Tracking Control for a 3 DOF Hydraulic Manipulator Including Actuator Dynamics. IEEE Access 2018, 6, 36798–36809. [Google Scholar] [CrossRef]
- Truong, H.V.A.; Tran, D.T.; To, X.D.; Ahn, K.K.; Jin, M. Adaptive Fuzzy Backstepping Sliding Mode Control for a 3-DOF Hydraulic Manipulator with Nonlinear Disturbance Observer for Large Payload Variation. Appl. Sci. 2019, 9, 3290. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Jin, M.; Choi, W.; Lee, J. Discrete time delay control for hydraulic excavator motion control with terminal sliding mode control. Mechatronics 2019, 60, 15–25. [Google Scholar] [CrossRef]
- Lee, J.; Chang, P.H.; Jin, M. Adaptive Integral Sliding Mode Control with Time-Delay Estimation for Robot Manipulators. IEEE Trans. Ind. Electron. 2017, 64, 6796–6804. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N.; Lee, J.; Jin, M. Adaptive-Robust Time-Delay Control for a Class of Uncertain Euler–Lagrange Systems. IEEE Trans. Ind. Electron. 2017, 64, 7109–7119. [Google Scholar] [CrossRef]
- Tran, D.T.; Jin, M.; Ahn, K.K. Nonlinear Extended State Observer Based on Output Feedback Control for a Manipulator with Time-Varying Output Constraints and External Disturbance. IEEE Access 2019, 7, 156860–156870. [Google Scholar] [CrossRef]
- Christopher Edwards, S.K.S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998; p. 237. [Google Scholar]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Neural Adaptive Backstepping Control of a Robotic Manipulator with Prescribed Performance Constraint. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3572–3583. [Google Scholar] [CrossRef]
- Shojaei, K.; Kazemy, A.; Chatraei, A. An Observer-Based Neural Adaptive PID2 Controller for Robot Manipulators Including Motor Dynamics with a Prescribed Performance. IEEE/ASME Trans. Mechatron. 2021, 26, 1689–1699. [Google Scholar] [CrossRef]
- Ma, Z.; Huang, P. Adaptive Neural-Network Controller for an Uncertain Rigid Manipulator with Input Saturation and Full-Order State Constraint. IEEE Trans. Cybern. 2020, 52, 2907–2915. [Google Scholar] [CrossRef]
- Huang, D.; Yang, C.; Pan, Y.; Cheng, L. Composite Learning Enhanced Neural Control for Robot Manipulator with Output Error Constraints. IEEE Trans. Ind. Inform. 2021, 17, 209–218. [Google Scholar] [CrossRef]
- Yang, C.; Huang, D.; He, W.; Cheng, L. Neural Control of Robot Manipulators with Trajectory Tracking Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4231–4242. [Google Scholar] [CrossRef]
- Dao, H.V.; Ahn, K.K. Task Coordinate Frame-Based Contouring Control of An Excavator with Sliding Mode Observer and Prescribed Performance. In Proceedings of the 2021 24th International Conference on Mechatronics Technology (ICMT), Singapore, 18–22 December 2021; pp. 1–6. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value | Unit |
|---|---|---|---|
| Mass of boom | 36.863 | kg | |
| Mass of arm | 13.138 | kg | |
| Mass of bucket | 9.008 | kg | |
| Mass moment of inertial of the boom | 7,306,759.708 | kgmm2 | |
| Mass moment of inertial of the arm | 1,178,748.843 | kgmm2 | |
| Mass moment of inertial of the bucket | 348,927.380 | kgmm2 | |
| Center of mass of the boom | [848.173, 213.106, 2.615] T | mm | |
| Center of mass of the arm | [336.525, 65.798, −0.000] T | mm | |
| Center of mass of the bucket | [210.471, 154.244, 0.082] T | mm | |
| Length of boom | 1692 | mm | |
| Length of arm | 851 | mm | |
| Length of bucket | 580 | mm |
| Controller | Parameters |
|---|---|
| ESOC | |
| SMOC | |
| Proposed controller |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dao, H.V.; Ahn, K.K. Active Disturbance Rejection Contouring Control of Robotic Excavators with Output Constraints and Sliding Mode Observer. Appl. Sci. 2022, 12, 7453. https://doi.org/10.3390/app12157453
Dao HV, Ahn KK. Active Disturbance Rejection Contouring Control of Robotic Excavators with Output Constraints and Sliding Mode Observer. Applied Sciences. 2022; 12(15):7453. https://doi.org/10.3390/app12157453
Chicago/Turabian StyleDao, Hoang Vu, and Kyoung Kwan Ahn. 2022. "Active Disturbance Rejection Contouring Control of Robotic Excavators with Output Constraints and Sliding Mode Observer" Applied Sciences 12, no. 15: 7453. https://doi.org/10.3390/app12157453
APA StyleDao, H. V., & Ahn, K. K. (2022). Active Disturbance Rejection Contouring Control of Robotic Excavators with Output Constraints and Sliding Mode Observer. Applied Sciences, 12(15), 7453. https://doi.org/10.3390/app12157453