
Systematic Evaluation and Optimization of Unmanned Aerial Vehicle Tilt Photogrammetry Based on Analytic Hierarchy Process

Abstract
:1. Introduction
2. AHP Method and System Evaluation Model Construction
2.1. AHP System Evaluation Method
2.2. Construction of the System Evaluation Model
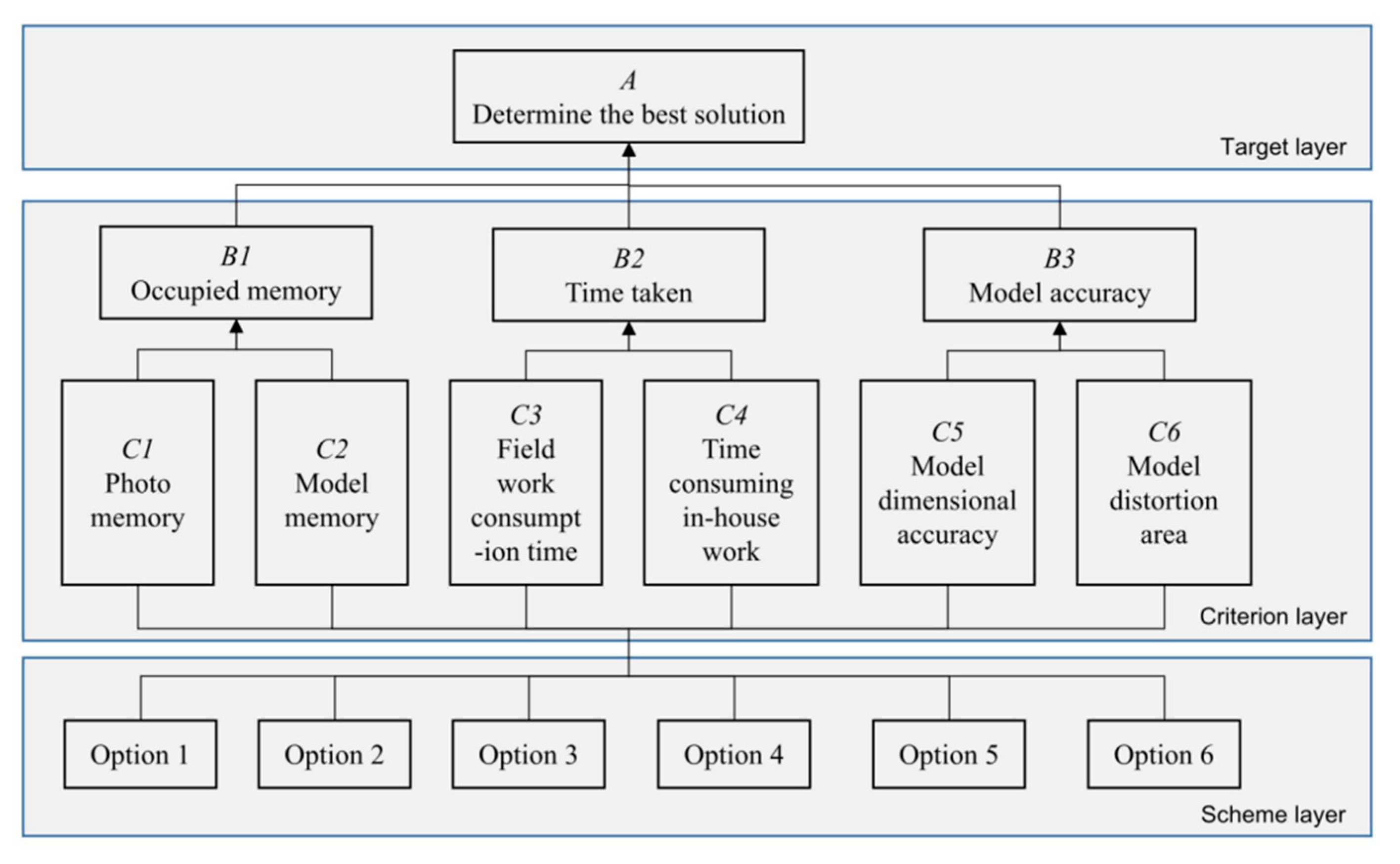
2.2.1. System Evaluation Hierarchy Model Construction
2.2.2. Construction of Judgment Matrix
2.2.3. Consistency Test
2.2.4. Calculation of Relative Weights and Synthetic Weights
- (1)
- Calculation of relative weights
- (2)
- Synthetic weight calculation
3. Experimental Process
3.1. Experimental Scheme Design
- (1)
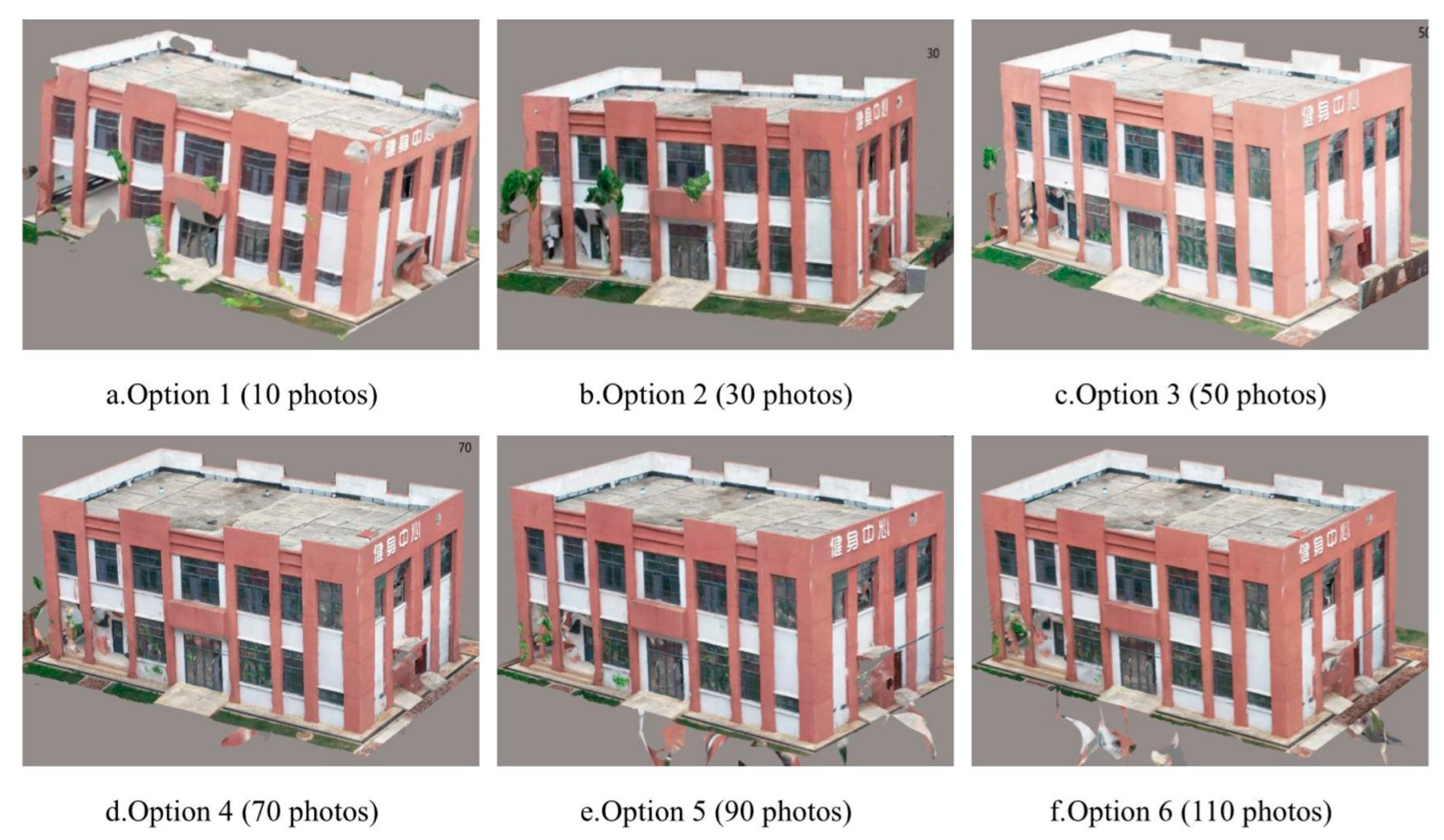
- Scheme design. Six shooting scenarios for tilt photography modeling were set up with different orders of magnitude of photos. The number of photos for the six shooting scenarios are 10, 30, 50, 70, 90 and 110.
- (2)
- External data collection. The UAV was manipulated to obtain external data, meanwhile recording the time spent on external photography shooting of each scheme (indicator C3).
- (3)
- Internal processing. Internal data processing was conducted, including air three encryption and 3D modeling processing. The photo memory (index C1), model memory (index C2), and internal processing time (index C4) were recorded separately in this process.
- (4)
- Data verification. The constructed real-world 3D model was verified by measuring the building in the field and the model size accuracy (index C5) and model distortion area (index C6) were obtained.
- (5)
- System evaluation calculation. The evaluation scores of each alternative were calculated based on the data of each indicator in C layer obtained from the experiment and the synthetic weights were constructed using the AHP method (as shown in Table 4).
- (6)
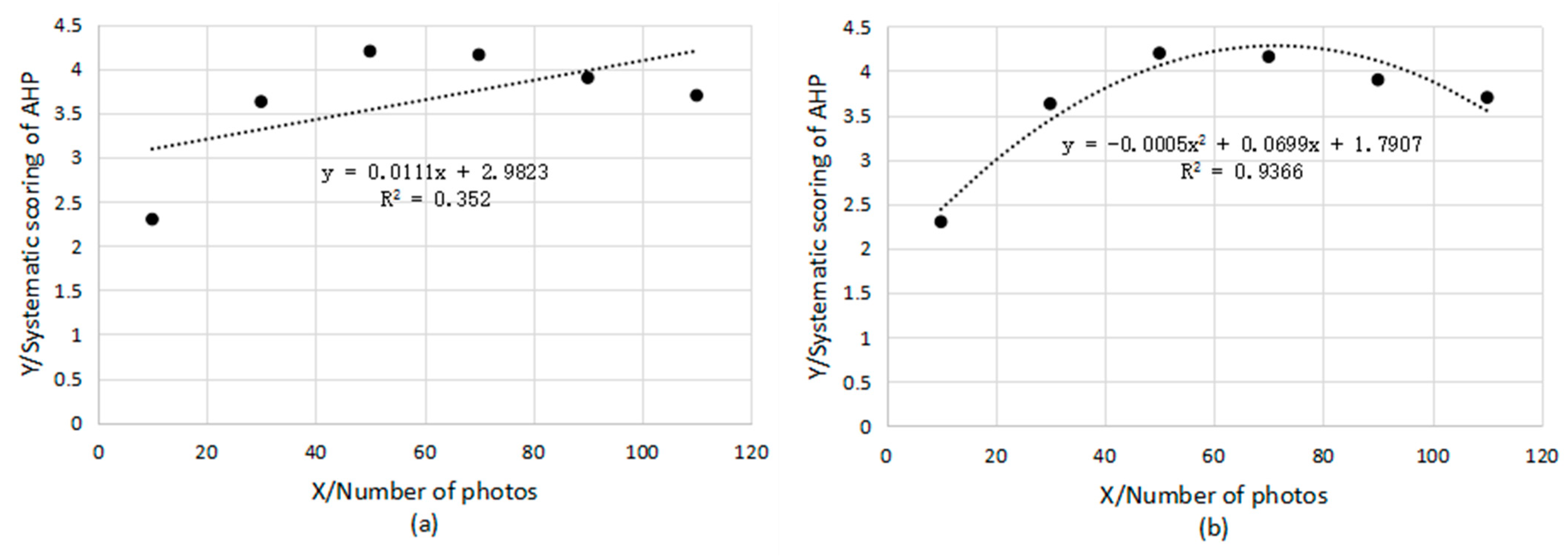
- Program optimization. The number of photographs taken and the system score of the AHP method were used as the two variables to construct polynomials and the maximum number was calculated by integration, which was used as the optimal solution.
3.2. Tilt Photography Field Data Acquisition
3.2.1. Research Objects and Equipment
3.2.2. Field Data Collection
3.3. Internal Data Processing and Validation
3.3.1. 3D Model Construction
3.3.2. Data Validation
4. Systematic Evaluation and Optimal Design of Shooting Solution
4.1. AHP Method System Evaluation Calculation and Analysis
4.2. Scheme Optimization and Verification
4.2.1. Mathematical Model Selection
4.2.2. Scheme Optimization Analysis
5. Discussion
- (1)
- Through the expert investigation method, the analytic hierarchy process model for the evaluation of tilt photogrammetry monomer modeling scheme was constructed and the comprehensive weight of the evaluation index was calculated.
- (2)
- The analytic hierarchy process model was substituted into the specific experiment for calculation and evaluation analysis.
- (3)
- The optimal shooting scheme was calculated by building a mathematical model, and the reliability of this method was verified by an experimental case.
- (4)
- The system evaluation and scheme optimization method proposed in this paper was applied to production practice, and the work efficiency was increased by 32.4%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. Uav Photogrammetry for Mapping and 3D Modeling—Current Status and Future Perspectives. In Proceedings of the Isprs International Archives of the Photogramme, Melbourne, Australia, 25 August–1 September 2012. [Google Scholar]
- Chaubey, S.; Puig, V. Autonomous Vehicle State Estimation and Mapping Using Takagi–Sugeno Modeling Approach. Sensors 2022, 22, 3399. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Zhang, H.; Zhao, J. High-Efficiency Determination of Coastline by Combination of Tidal Level and Coastal Zone DEM from UAV Tilt Photogrammetry. Remote Sens. 2020, 12, 2189. [Google Scholar] [CrossRef]
- Jia, S.G.; Jin, A.B.; Zhao, Y.Q. Application of UAV oblique photogrammetry in the field of geology survey at the high and steep slope. Rock Soil Mech. 2018, 39, 1130–1136. [Google Scholar]
- Ye, Z.; Xu, Q.; Liu, Q.; Dong, X.; Wang, X.; Ning, H. Application of Unmanned Aerial Vehicle Oblique Photogrammetry to Investigation of High Slope Rock Structure. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1739–1746. [Google Scholar]
- Li, D.; Liu, L.K.; Shao, Z.F. An integration of aerial oblique photogrammetry and mobile mapping system for Urban Geographical conditions monitoring. Geomat. Inf. Sci. Wuhan Univ. 2015, 40, 427–435+443. [Google Scholar]
- Chen, Y.; He, Y. Small UAV oblique camera system design and test for distributed photovoltaic power station survey. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2019, 35, 305–313. [Google Scholar]
- Feng, W. Application of Unmanned Aerial Vehicle Survey Technology in Alpine and High Altitude Complex and Difficult Mountainous Area. J. Railw. Eng. Soc. 2019, 36, 9–13. [Google Scholar]
- Zeng, J.; Zhang, X.L.; Zhou, X.M.; Yi, T. Topographic information extraction of larch plantation by tilt Photogrammetry. J. Beijing For. Univ. 2019, 41, 1–12. [Google Scholar]
- Jie, S.H.A.N.; Zhixin, L.; Wenyuan, Z.H.A.N.G. Recent progress in large-scal 3D city modeling. Acta Geod. Cartogr. Sin. 2019, 48, 1523–1541. [Google Scholar]
- Wang, Y.L. Systems Engineering, 5th ed.; China Machine Press: Beijing, China, 2015; pp. 122–123. [Google Scholar]
- Li, R.X.; Hu, W.X. Internet finance development strategy selection based on SWOT and AHP. Stat. Decis. 2018, 34, 71–74. [Google Scholar]
- Zhang, Z.T.; Chen, Y.; Wei, Y.; Zheng, Q.T. Construction and application of the evaluation index system for high quality development of regional agricultural mechanization. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2021, 37, 64–72. [Google Scholar]
- Dokupilová, D.; Baláž, V.; Kurincová, V.Č.; Mikušková, E.B.; Gombitová, D. Identifying major policy challenges and policy interventions via expert methods: Application of the Delphi and AHP methods in preparation of the Partnership Agreement for the Slovak Republic in period 2021–2027. Rev. Econ. Perspect. 2020, 20, 361–377. [Google Scholar] [CrossRef]
- Zhou, Y.F. Performance evaluation of agricultural products supply chain based on AHP-FCE model. Stat. Decis. 2020, 36, 178–180. [Google Scholar]
- Zhao, Q.; Deng, Y.M. Selection of three-dimensional body scanner based on analytic hierarchy process. J. Text. Res. 2021, 42, 155–161. [Google Scholar]
- Dong, H.; Shu, W.; Chen, C.; Sun, C.; You, C. Research on complexity evaluation method of dangerous Driving Scenes. Automot. Eng. 2020, 42, 808–814. [Google Scholar]
- Liu, Y.Y.; Wang, S.Q.; Wang, X.B.; Jiang, D. Flood risk assessment in Bangladesh, India and Myanmar based on the AHP weight method and entropy weight method. Geogr. Res. 2020, 39, 1892–1906. [Google Scholar]
- Song, Z.; Gao, H.; Liu, W.; Li, L.; Zhang, W.; Wang, D. Systematic assessment of dredged sludge dewaterability improvement with different organic polymers based on analytic hierarchy process. J. Environ. Sci. 2021, 103, 311–321. [Google Scholar] [CrossRef]
- Rovelli, R.; Senes, G.; Fumagalli, N.; Sacco, J.; De Montis, A. From railways to greenways: A complex index for supporting policymaking and planning. A case study in Piedmont (Italy). Land Use Policy 2020, 99, 104835. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, X.Q.; Lu, Y. Study on the rural ecotourism resource evaluation system. Environ. Technol. Innov. 2020, 20, 101131. [Google Scholar]
- Xi, X.; Ding, Z.; Ye, R.Q.; Niu, R.Q. Evaluation of geological environment carrying capacity of Huangshi city based on FCE-AHP. J. Nat. Resour. 2021, 36, 646–658. [Google Scholar] [CrossRef]
- Xiao, P.; Peng, K.; Zhao, X.Y.; Wang, X.-F.; Liang, C.; Cheng, G. Evaluation and analysis on suitability of development and utilization of the bank line resources in the middle reaches of Yangtze River. J. Nat. Resour. 2020, 35, 788–798. [Google Scholar]
- Wu, X.P.; Kong, Q.P. The Construction and Application of the Comprehensive Difficulty Model of Mathematical Advanced Examination Questions Based on AHPTheor. J. Math. Educ. 2020, 29, 29–34. [Google Scholar]
- Zhang, D.G.; Li, Y.D.; Huang, H.W. Preliminary analysis of the postgraduate education quality assessment for first-class talent cultivation: A study on the indicator system based on the AHP and FCE. J. Grad. Educ. 2020, 2, 60–67. [Google Scholar] [CrossRef]
- Shihui, W.U.; Xiaodong, L.I.U.; Zhengxin, L.I.; Yu, Z.H.O.U. A consistency improving method in the analytic hierarchy process based on directed circuit analysis. J. Syst. Eng. Electron. 2019, 30, 112–133. [Google Scholar]
- Yang, J.; Shen, L.; Jin, X.; Hou, L.; Shang, S.; Zhang, Y. Evaluating the quality of simulation teaching in Fundamental Nursing Curriculum: AHP-Fuzzy comprehensive evaluation. Nurse Educ. Today 2019, 77, 77–82. [Google Scholar] [CrossRef] [PubMed]
- Revuelto, J.; Alonso-Gonzalez, E.; Vidaller-Gayan, I.; Lacroix, E.; Izagirre, E.; Rodríguez-López, G.; López-Moreno, J.I. Intercomparison of UAV platforms for mapping snow depth distribution in complex alpine terrain. Cold Reg. Sci. Technol. 2021, 190, 103344. [Google Scholar] [CrossRef]
- Andriyanov, N.; Khasanshin, I.; Utkin, D.; Gataullin, T.; Ignar, S.; Shumaev, V.; Soloviev, V. Intelligent System for Estimation of the Spatial Position of Apples Based on YOLOv3 and Real Sense Depth Camera D415. Symmetry 2022, 14, 148. [Google Scholar] [CrossRef]
- Carrio, A.; Tordesillas, J.; Vemprala, S.; Saripalli, S.; Campoy, P.; How, J.P. Onboard Detection and Localization of Drones Using Depth Maps. IEEE Access 2020, 8, 30480–30490. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale | Meaning |
|---|---|
| 1 | Two elements of equal importance |
| 3 | The former is slightly more important than the latter |
| 5 | The former is obviously more important than the latter |
| 7 | The former is more important than the latter |
| 9 | The former is more important than the latter |
| 2, 4, 6, 8 | The middle value of the above two adjacent scales |
| reciprocal | Two elements, the latter is more important than the former (refer to the above scale for the degree) |
| Matrix Order (n) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Random consistency index (R.I.) | 0 | 0 | 0.52 | 0.89 | 1.12 | 1.26 | 1.36 | 1.41 | 1.46 | 1.49 |
| B Layer | C Layer | ||||
|---|---|---|---|---|---|
| Evaluating Indicator | Wi | Wi0 | Evaluating Indicator | Wi | Wi0 |
| B1 | 0.405 | 0.101 | C1 | 1.414 | 0.667 |
| C2 | 0.707 | 0.333 | |||
| B2 | 0.909 | 0.226 | C3 | 0.500 | 0.200 |
| C4 | 2.000 | 0.800 | |||
| B3 | 2.714 | 0.674 | C5 | 1.000 | 0.500 |
| C6 | 1.000 | 0.500 | |||
| B1 (0.101) | B2 (0.226) | B3 (0.674) | Composite Weight | |
|---|---|---|---|---|
| C1 | 0.667 | 0 | 0 | 0.067 |
| C2 | 0.333 | 0 | 0 | 0.034 |
| C3 | 0 | 0.200 | 0 | 0.045 |
| C4 | 0 | 0.800 | 0 | 0.180 |
| C5 | 0 | 0 | 0.500 | 0.337 |
| C6 | 0 | 0 | 0.500 | 0.449 |
| Evaluation Interval | [0–20%] | (20–40%] | (40–60%] | (60–80%] | (80–100%] |
| Evaluation score | 5 | 4 | 3 | 2 | 1 |
| Photo Memory C1 (0.017) | Model Memory C2 (0.084) | Field Shooting Time C3 (0.113) | Office Processing Time C4 (0.113) | Model Dimensional Accuracy C5 (0.168) | Model Distortion Area C6 (0.505) | Comprehensive Evaluation of the Scheme | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Option (Number of Photos) | Raw Data/M | Scale Evaluation | Raw Data/M | Scale Evaluation | Raw Data/min | Scale Evaluation | Raw Data/min | Scale Evaluation | Raw Data/cm | Scale Evaluation | Raw Data/cm2 | Scale Evaluation | |
| Option 1 (10) | 74.2 | 5 | 323.0 | 5 | 5.0 | 5 | 8.6 | 5 | 46.6 | 1 | 469.4 | 1 | 2.30 |
| Option 2 (30) | 222.0 | 5 | 1013.8 | 4 | 25.0 | 5 | 15.8 | 5 | 9.6 | 4 | 255.1 | 2 | 3.63 |
| Option 3 (50) | 374.0 | 2 | 1648.6 | 3 | 42.0 | 4 | 23.6 | 4 | 3.4 | 5 | 182.4 | 4 | 4.20 |
| Option 4 (70) | 523.0 | 2 | 2457.6 | 2 | 69.0 | 2 | 30.3 | 3 | 4.0 | 5 | 167.0 | 5 | 4.16 |
| Option 5 (90) | 671.0 | 1 | 2979.8 | 1 | 89.0 | 1 | 37.5 | 2 | 3.9 | 5 | 126.7 | 5 | 3.90 |
| Option 6 (110) | 822.0 | 1 | 3225.6 | 1 | 102.0 | 1 | 44.7 | 1 | 3.6 | 5 | 105.9 | 5 | 3.70 |
| Number of Photos/x | Truth Value/y′ | Linear Fitting Function Model | Quadratic Fitting Function Model | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Estimate/y | Deviation Value/Δy | MSE | RMSE | R2 | Estimate/y | Deviation Value/Δy | MSE | RMSE | R2 | ||
| 10 | 2.3 | 3.09 | 0.79 | 0.26 | 0.51 | 0.35 | 2.43 | 0.14 | 0.03 | 0.17 | 0.94 |
| 30 | 3.63 | 3.32 | −0.31 | 3.44 | −0.19 | ||||||
| 50 | 4.2 | 3.54 | −0.66 | 4.04 | −0.16 | ||||||
| 70 | 4.16 | 3.76 | −0.40 | 4.23 | 0.07 | ||||||
| 90 | 3.9 | 3.98 | 0.08 | 4.03 | 0.13 | ||||||
| 110 | 3.7 | 4.20 | 0.50 | 3.43 | −0.27 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Wang, J.; Zhu, Y.; Chen, Q.; Liang, X. Systematic Evaluation and Optimization of Unmanned Aerial Vehicle Tilt Photogrammetry Based on Analytic Hierarchy Process. Appl. Sci. 2022, 12, 7665. https://doi.org/10.3390/app12157665
Zhu Z, Wang J, Zhu Y, Chen Q, Liang X. Systematic Evaluation and Optimization of Unmanned Aerial Vehicle Tilt Photogrammetry Based on Analytic Hierarchy Process. Applied Sciences. 2022; 12(15):7665. https://doi.org/10.3390/app12157665
Chicago/Turabian StyleZhu, Zan, Jianqi Wang, Yating Zhu, Qiran Chen, and Xinyu Liang. 2022. "Systematic Evaluation and Optimization of Unmanned Aerial Vehicle Tilt Photogrammetry Based on Analytic Hierarchy Process" Applied Sciences 12, no. 15: 7665. https://doi.org/10.3390/app12157665
APA StyleZhu, Z., Wang, J., Zhu, Y., Chen, Q., & Liang, X. (2022). Systematic Evaluation and Optimization of Unmanned Aerial Vehicle Tilt Photogrammetry Based on Analytic Hierarchy Process. Applied Sciences, 12(15), 7665. https://doi.org/10.3390/app12157665