Abstract
This paper presents a dynamic analysis of the ParReEx multibody mechanism, which has been designed for human wrist joint rehabilitation. The starting point of the research is a virtual prototype of the ParReEx multibody mechanism. This model is used to simulate the dynamics of the multibody mechanism using ADAMS in three simulation scenarios: (a) rigid kinematic elements without friction in joints, (b) rigid kinematic elements with friction in joints, and (c) kinematic elements as deformable solids with friction in joints. In all three cases, the robot is used by a virtual patient in the form of a mannequin. Results such as the connecting forces in the kinematic joints and the torques necessary to operate the ParReEx robot modules are obtained by dynamic simulation in MSC.ADAMS. The torques obtained by numerical simulation are compared with those obtained experimentally. Finite element structural optimization (FEA) of the flexion/extension multibody mechanism module is performed. The results demonstrate the operational safety of the ParReEx multibody mechanism, which is structurally capable of supporting the external loads to which it is subjected.
1. Introduction
Although there has been an increasing emphasis on prevention in recent decades, strokes are one of the leading causes of permanent disability worldwide [1]. In recent decades, strokes have led to the disability and even death of a very large number of people; in recent years, the number of people affected annually is about 13 million [2].
Globally, the leading causes of death are ischemic heart disease, with an incidence of 14.8%, and stroke, with an incidence of 11.8% [3].
Recent studies show that the number of stroke cases is increasing. Taking into account the aging of the population worldwide, there are advanced fears regarding the increasingly limited capacity of European and global medical systems to meet patient care requirements [4]. It is estimated that in the near future, strokes will affect an upper limb in over 85% of cases [5], and the success rate for arm rehabilitation will be only 10% [6] due to the complexity of upper limb movement [7]. In less than 10 years, the annual medical cost per stroke will increase rapidly; for example, in the USA, it will be 2.5 times higher than it was in 2012 [8]. Currently, in developed countries, 3–4% of medical costs are allocated to strokes [9]. Physical rehabilitation is becoming less and less effective as each patient has to work with a physical therapist [10], but the use of robotic exoskeletons allows for more effective therapy through repetitive movements and adaptive training [11,12].
The use of rehabilitation technology and robotics optimizes the results, minimizes costs by conserving labour and maximizing progressive repetitions, and improves the outcome compared to the high costs of conventional therapy performed as one-on-one training with a professional therapist [13,14,15].
Numerous articles have been dedicated to the study of robotic structures used for upper limb rehabilitation. Robotic systems for upper limb rehabilitation are the subject of much research. Thus, the design and performance evaluation of the RUPERT exoskeleton for upper limbs is presented in [16]. An innovative robotic system with a spherical architecture is developed and presented in [17]. A parallel robotic system based on a spherical architecture, ASPIRE, was designed for three degrees-of-freedom (DOFs) shoulder rehabilitation, as described in this study. In [18], a study of torque monitoring is performed for the ASPIRE robotic system. Clinical trials based on the use of ASPIRE on post-stroke patients are presented. Further, design optimization is studied based on therapist feedback following clinical evaluation. A study of the ASPIRE robot for upper limb rehabilitation is presented in [19], where, with the help of ADAMS software, the dynamic analysis of the robotic system is performed. The study of hand joint movements is also presented in [20]. Classifications and analyses of these structures can be found in [21].
Over the past decade, many robotic devices have been designed to enhance the motor rehabilitation process. In [22,23,24,25], the authors noted an improvement in quality of life and concluded that robot-assisted therapy is beneficial for recovering the motor functions of the upper limbs in patients with early-stage stroke. Neurorehabilitation therapy including task-oriented training with the ARMin exoskeleton robot can enhance improvement of motor function in a chronically impaired paretic arm after stroke more effectively than conventional therapy [23].
A hybrid exoskeleton named EFW Exo II is developed for the motor function rehabilitation of elbow, forearm and wrist, and the ranges of motion meet the rehabilitation demands of daily living [24]. For clinical trials, an acquisition data system based on wearable sensors was used; due to their advantages, these systems are often used in evaluating biomechanical human data [25,26,27,28,29,30,31].
Several robotic devices have been developed to rehabilitate the wrist joint, which, after the shoulder, is the second-most complex joint of the human upper limb. The authors of [32] review the main wrist rehabilitation robots developed recently in terms of mechanical design and aspects of control, and highlight aspects of experimental tests of these robots on patients with neurological disorders.
Krebs et al. studied a wrist rehabilitation robot that offers three DOFs [33], which, mounted on the accompanying robot, MIT-MANUS [34,35], has become a very suitable tool for the rehabilitation of the shoulders and elbow. Another wrist robot [36] with three active DOFs was developed with a similar structure and an additional passive prismatic joint. RiceWrist [37], as an electrically operated forearm–wrist exoskeleton, uses a serial RRR manipulator and cable transmissions to rehabilitate the wrist and radio–ulnar joints. Robots presented in [38,39] allow the rehabilitation of two movements: forearm supination/pronation and wrist flexion/extension, while in [40], the human wrist has been simplified to a single DOF—namely flexion/extension. A parallel wrist rehabilitation robot driven by two pneumatic actuators is developed in [41] to rehabilitate two DOFs: flexion/extension and radial/ulnar deviation.
Patient safety is a critical milestone in the development of robotic systems for medical applications to avoid any unwanted damage. In this case, it can be achieved by implementing a dynamic model in the control system [42,43] using various principles such as: the Lagrange–Euler formalism, the principle of virtual work [44] or the Newton–Euler equations [45,46,47].
ADAMS View, software designed for the analysis of mobile systems dynamics, with an increased accuracy of kinematic and dynamic results obtained from numerical simulations has been used in several studies of robotic systems for rehabilitation of human movements, such as exoskeletons or flexible robotic structures for minimally invasive surgery [19,27,48,49].
For structural optimization of a kinematic element, one of the most powerful software programs is ANSYS. In [19], we presented finite element analysis of a kinematic element in the ASPIRE robot structure.
The aim of this study is to analyze from a kinematic, dynamic and experimental point of view a robotic system designed for the rehabilitation of the human wrist joint of post-stroke survivors. Numerical simulations are performed for the robot mounted on the wrist of a virtual patient. For validation of the dynamic model built in ADAMS, the results obtained by numerical simulation are compared with those obtained experimentally. Three distinct situations will be studied:
- The kinematic elements are considered as rigid bodies, and the friction in the kinematic joints is not considered;
- The kinematic elements are considered as rigid bodies, and the friction in the robot joints is considered;
- The kinematic elements are considered as flexible bodies, and the friction in the robot joints is considered.
The paper is structured as follows: after the introduction, a functional constructive description of the ParReEx robot for wrist rehabilitation is presented. Dynamic analysis is presented in ADAMS for the three considered operating hypotheses. Then, structural optimization is performed for the circular guidance of the ParReEx robot. At the end, experimental results, discussions, and conclusions are presented.
2. Constructive and Functional Description of the ParReEx-Wrist Robot
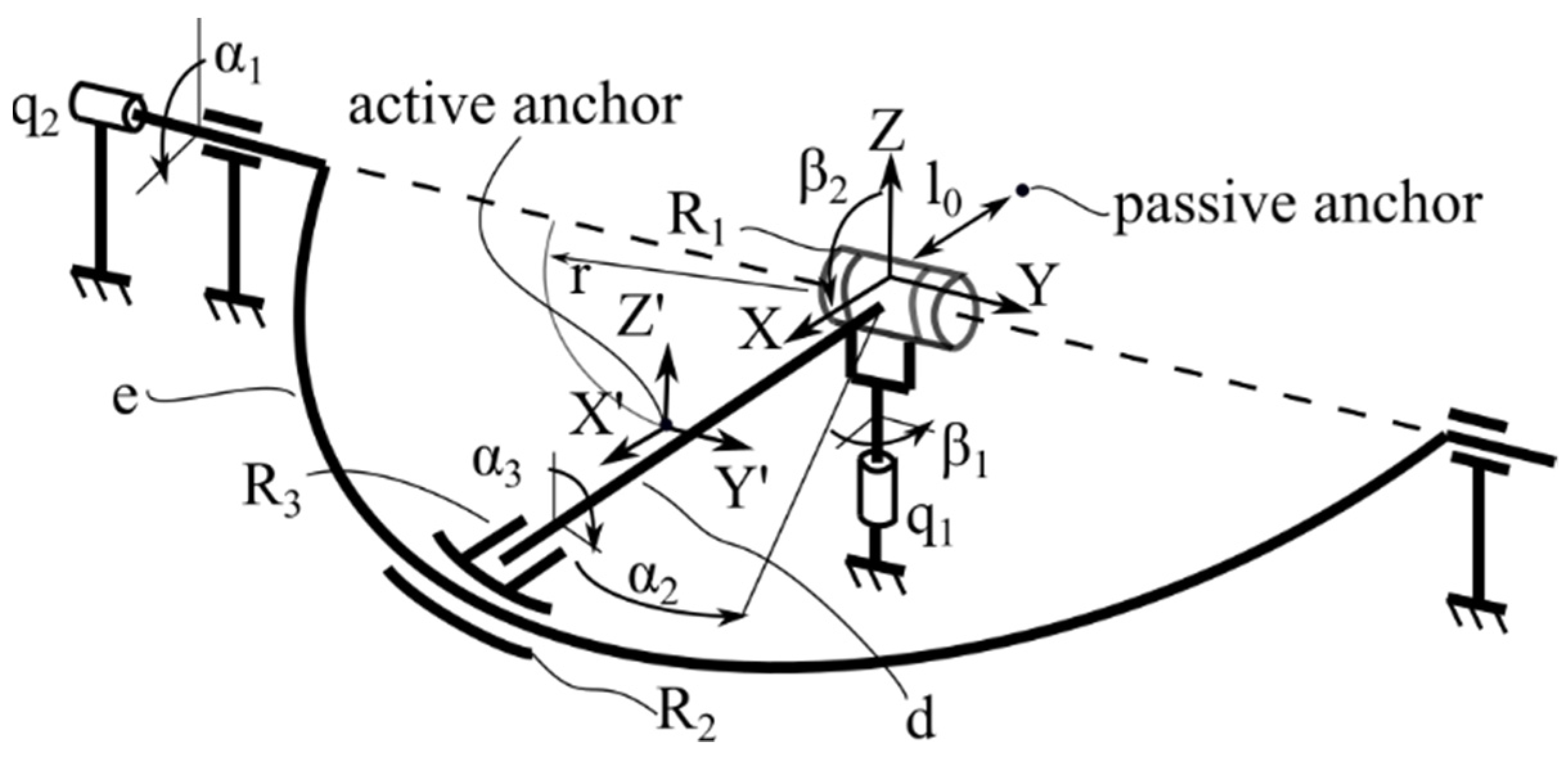
The ParReEx-wrist robotic system is designed for the rehabilitation of the wrist, namely flexion and extension of the wrist and ulnar and radial deviation of the wrist [49]. The robot has two degrees of freedom (DoF), one for each type of motion (Figure 1), namely: the revolute joint q1 to perform flexion–extension and the revolute joint q2 to perform radial–ulnar deviation. Each joint separately actuates a kinematic chain as follows: q1 actuates an RR chain consisting of the R1 and R3 revolute joints connected through link d around the OZ axis; q2 actuates link e around the OY axis, fixed between two bearings. Links d and e are connected via two revolute joints, namely R2 and R3, required to perform the circumduction motion (which is a combination of flexion–extension and ulnar–radial deviation motions). Notations used in Figure 1 represents: q1—flexion–extension motion; q2—radial–ulnar deviation motion; R1, R2, R3, R4—revolute joints; e, d—mechanism links.
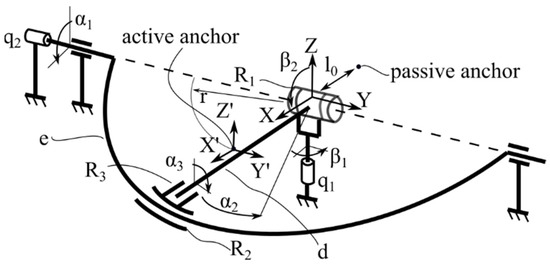
Figure 1.
The ParReEx-wrist kinematic scheme [47].
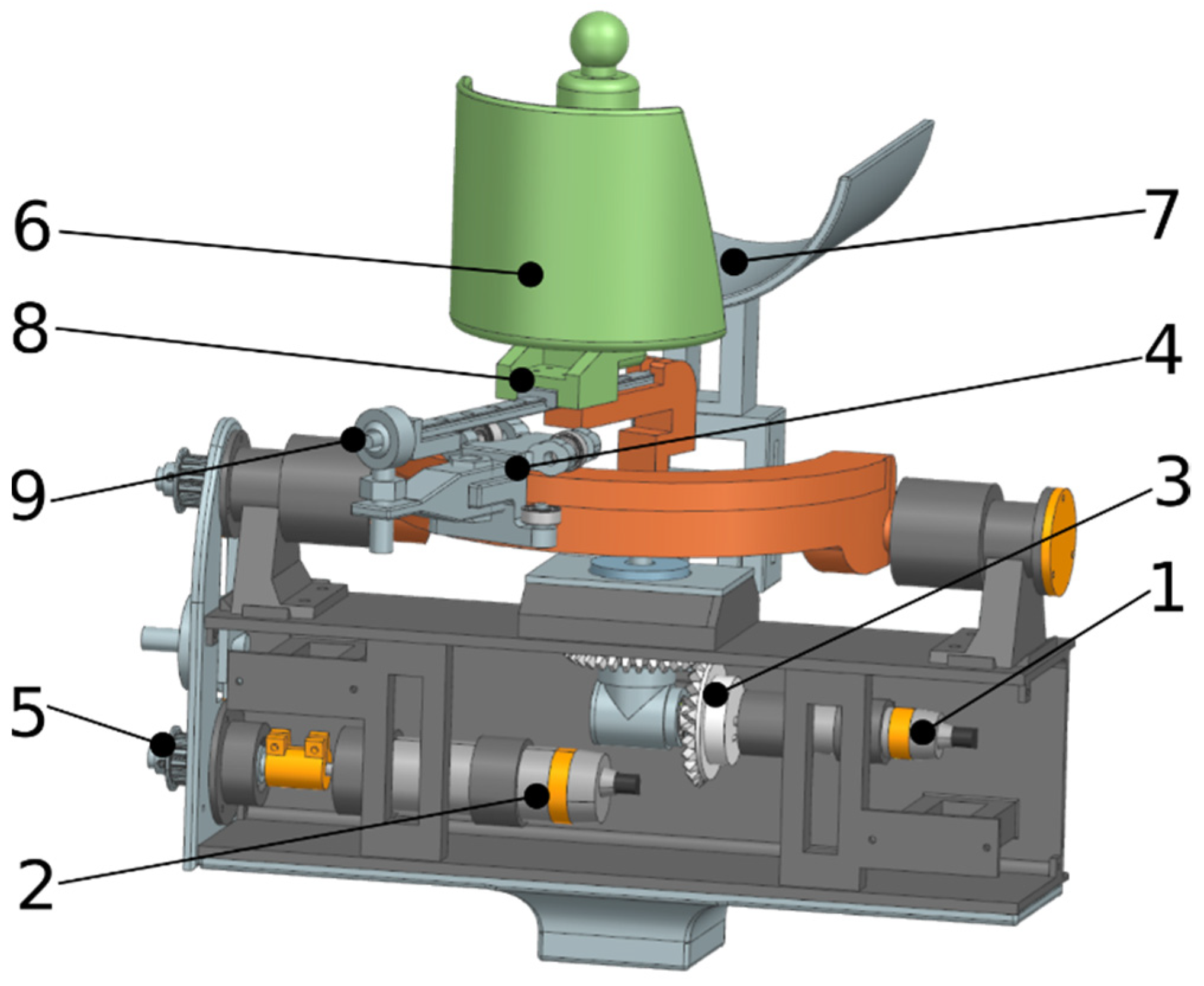
The ParReEx-wrist CAD model is presented in Figure 2. Motor (1) achieves the flexion–extension motion of the wrist through a set of bevel gears (3) and a custom-made circular rail and sledge guiding (4). Motor (2) performs radial–ulnar deviation using a timing belt and pulleys (5). The patient’s hand is supported using the wrist support (6), which acts as active anchor, and the forearm support (7), which acts as passive anchor. Since the patient’s wrist is placed above the fixed coordinate system (Figure 1), as the intersection between the flexion–extension and radial–ulnar deviation robot motion axis, an additional straight rail-and-sledge mechanism (8) is required, as well as a spherical joint (9) to perform the circumduction motion.
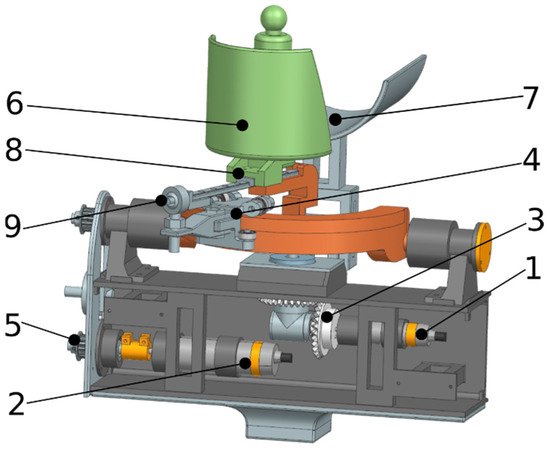
Figure 2.
The ParReEx-wrist CAD model.
Notations used in Figure 2 represents: 1—motor for flexion–extension motion; 2—motor for radial–ulnar deviation motion; 3—bevel gears; 4—sledge pulleys; 5—belt transmission; 6—wrist support; 7—forearm support; 8—straight rail and sledge mechanism; 9—spherical joint.
The ParReEx-wrist experimental model is presented in Figure 3. Based on the virtual prototype of the ParReEx robot, the execution drawings for the component parts of the assembly were made. The housing of the robotic system and the component parts, such as those numbered 6, 7 and 8 in Figure 2, are manufactured by additive manufacturing. For this purpose, we used a 3D printer, which works on the fused deposit manufacturing principle. For the execution of the printed parts, we used 3D models, and, using Cura Ultimaker software, we made the G-code for 3D printing. The printer uses ABS (acrylonitrile butadiene styrene) wire, which is melted by the print head, and successive layers are deposited to achieve the shape of the parts. Thus, these parts are assembled to realize the prototype of the robotic system, as shown in Figure 3, where the robotic system is shown in the situation of its use by a patient.

Figure 3.
The ParReEx-wrist experimental model.
3. Dynamic Analysis in MSC.ADAMS of ParReEx-Wrist Robot
3.1. Dynamic Analysis in MSC.ADAMS of ParReEx-Wrist Robot, Considering the Kinematic Elements as Rigid Solids without Considering Joint Friction
Based on the structural scheme of the ParReEx robot, a virtual prototype is designed using Unigraphics NX software. The development of the virtual prototype is necessary from two aspects: it will be used to simulate the dynamic behavior of the robot, as well as for structural optimization with the finite element method. The development of the dynamic model in ADAMS involves the following steps:
- ✓
- Definition of the materials of the robot subassemblies.
Robot element materials can be selected from the ADAMS database, or new materials can be defined by their properties. In this case, the materials of the component elements are defined in the database, and their mechanical properties are further explained. For each component element of the robot, we specify the material from which it is made. Thus, in the robot component, we have parts that are made of aluminum alloy with the following properties: density = 2470 kg/m3, Young’s Modulus = 7.17 × 1010 N/m2 and Poisson’s ratio = 0.33. The robot housing, the circular guide and the elements supporting the patient’s hand are made of ABS. Acrylonitrile butadiene styrene, commonly known as ABS, is a polymer and opaque thermoplastic comprised of acrylonitrile, butadiene, and styrene. ABS is an incredibly versatile and durable plastic, making it an extremely popular material used in a variety of industries. The mechanical properties of this material are as follows: density = 1.15 × 103 kg/m3, Young’s Modulus=1.6 × 1010 N/m2 and Poisson’s ratio = 0.340.
- ✓
- Kinematic joints related to the robot structure are defined.
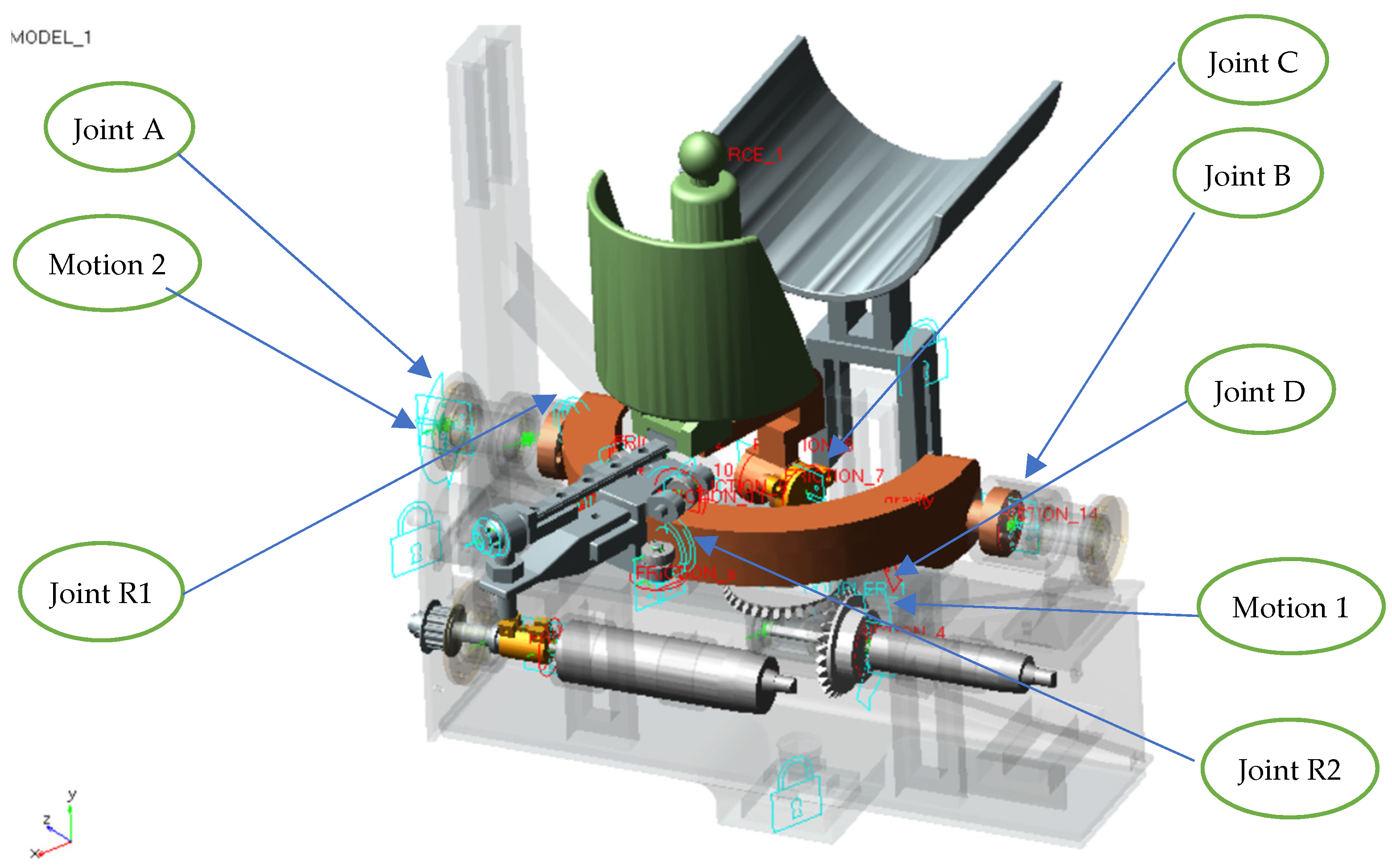
In the structure of the robot, there are rotational joints and upper rolling joints. In Figure 4, the kinematic joints defined in the ADAMS dynamic model are detailed, namely:
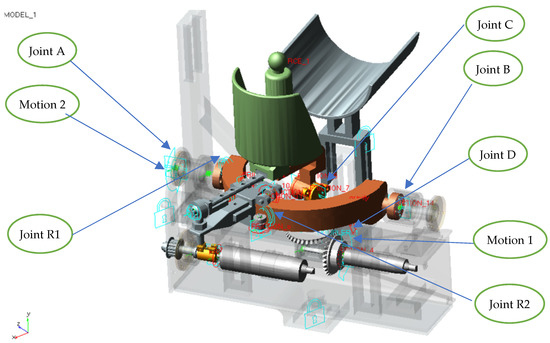
Figure 4.
Kinematic joints defined in the ADAMS dynamic model.
- Joint A and Joint B are the rotational kinematic joints of the circular guide (4) with the robot housing. Joint A defines Motion 1, the law of motion for radial–ulnar deviation;
- Joint C is a rotational joint of the Hooke coupling structure;
- Joint D is a rotational joint of the bevel pinion with the system housing. This joint specifies Motion 2, the motion law for hand joint flexion–extension;
- Kinematic Joints R1 and R2, are superior joints that provide contact for a point on a curve. Special attention has been paid to the correct definition of the rolling joints between the circular guide and the slide. For this purpose, we have chosen to define a point-on-curve upper joint. In this case, for Joint R1 we have specified the contact between the arc at the top of the guide and a point belonging to the slide. For Joint R2, we have specified the contact between the arc of the circle at the bottom of the guide and a point belonging to the slide. These joints assure non-detaching contact between the circular guide (an arc of a circle) and the slide.
All other kinematic joints are defined according to the structural schematic shown in Figure 1, as detailed in Figure 4 on the ADAMS dynamic model.
- ✓
- Another important step in the completion of the dynamic model is the definition of the toothed belt drive from the drive that performs ulnar–radial motion. For this purpose, we used the ADAMS machinery facility, which allows the definition of a toothed belt drive.
- ✓
- Another step in finalizing the ParReEx robot model is to define the bevel gear.
For this purpose, we used the existing facility in Adams machinery to define gear drives. All the parameters required to define a bevel gear can be set in Table 1, namely: axis of rotation, number of teeth, face width, back cone distance, pitch angle, pitch apex, bore radius, outer module, addendum and dedendum factor.

Table 1.
Bevel gear geometric parameters.
The material properties of bevel gears are shown in Table 2. Further, on the bevel gear, the contact parameters between the tooth flanks are set, as shown in Table 3, namely: contact stiffness, contact exponent and damping coefficient.
Table 2.
Bevel gear material properties.
Table 3.
Bevel gear contact parameters.
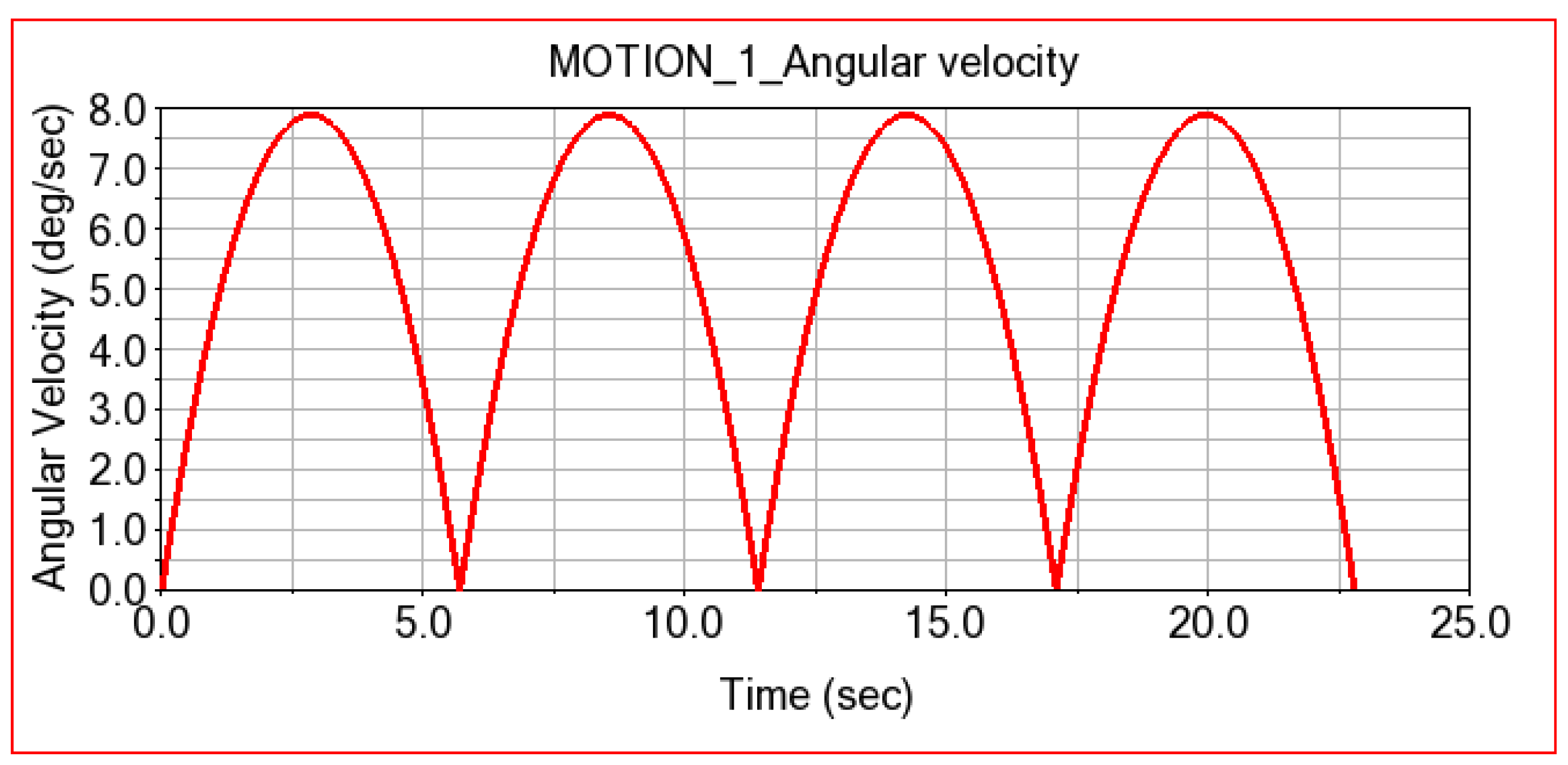
The law-of-motion time-history diagram is shown in Figure 5. The two parameters, the amplitude of motion and the time period, were chosen taking into account the similarity between the laws of motion in numerical simulation and those recommended by therapists for proper physical rehabilitation. The two laws of motion that will be assisted by the robot are named in MSC.ADAMS as MOTION_1 and MOTION_2. These movements are defined using the STEP function, as shown below.
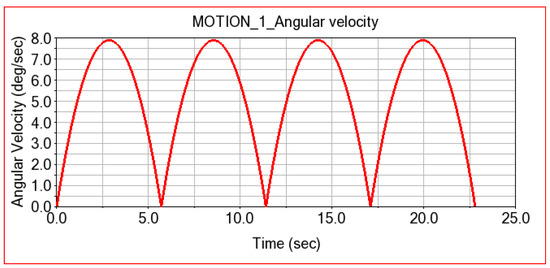
Figure 5.
Law of motion imposed in ADAMS on ParReEx-wrist robot motor Joint E.
The law of MOTION 1, which corresponds to the flexion–extension movement, has a variation of ±50°, with one step of the flexion movement performed in 5.7 s.
The law of MOTION 2 corresponds to ulnar–radial motion; it is specified on the same 5.7 s step, but the amplitude is 30 degrees.
MOTION 1: STEP (time, 0.0, 0.0d, 5.7, −50.0d) + STEP (time, 5.7, 0d, 11.4, 50.0d) + STEP (time, 11.4, 0.0d, 17.1, −50.0d) + STEP (time, 17.1, 0d, 22.8, 50.0d).
MOTION 2: STEP (time, 0.0, 0.0d, 5.7, 30.0d) + STEP (time, 5.7, 0d, 11.4, −30.0d) + STEP (time, 11.4, 0.0d, 17.1, 30.0d) + STEP (time, 17.1, 0d, 22.8, −30.0d).
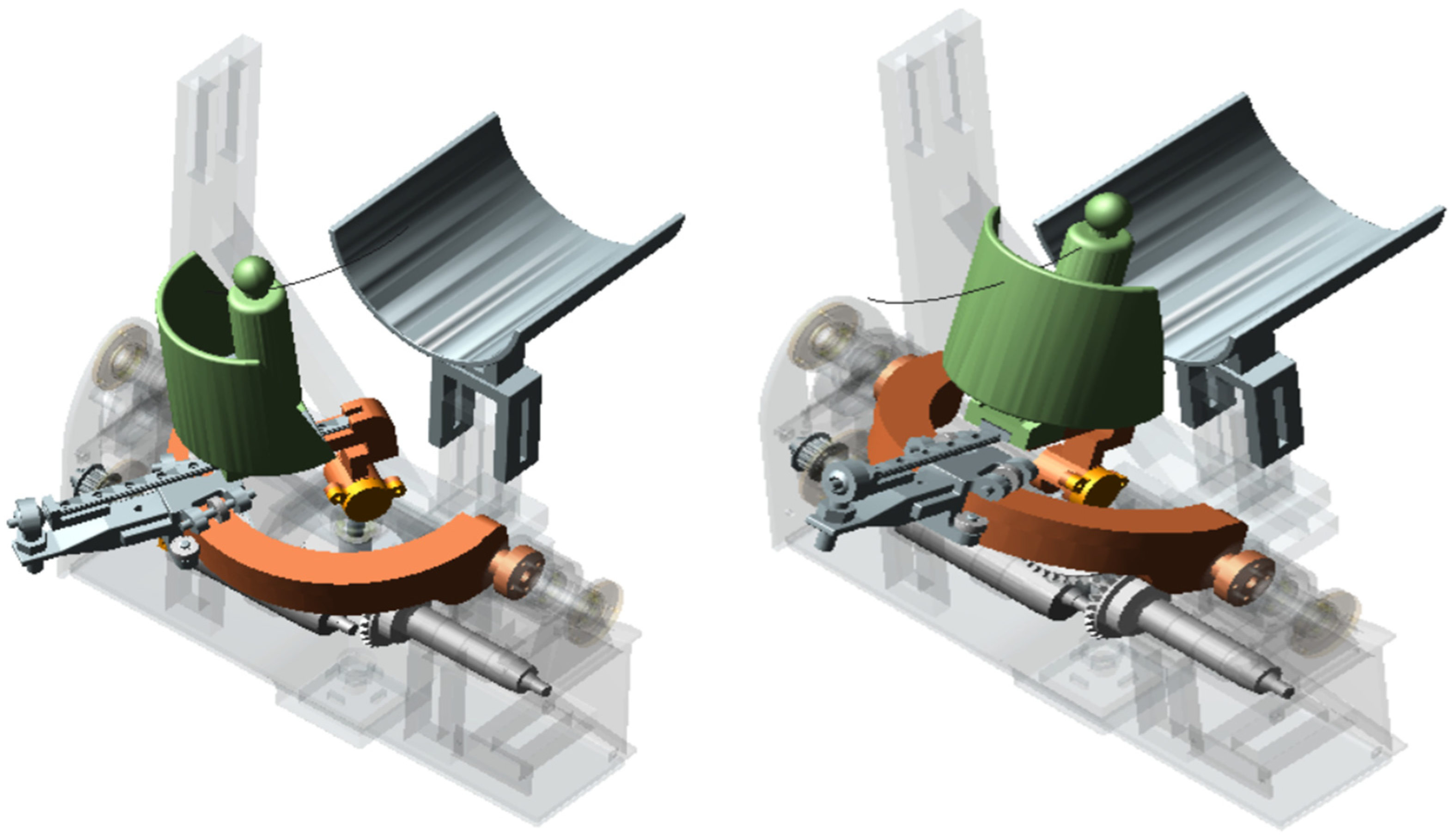
The mannequin-rehabilitation robot assembly is dynamically analyzed in MSC.ADAMS with the two modules of the ParReEx-wrist robot (flexion/extension and radial–ulnar motion) active simultaneously for a period of 22.8 s. Figure 6 presents the two extreme operating positions of the ParReEx robot corresponding to the combined flexion–extension and ulnar–radial movements.
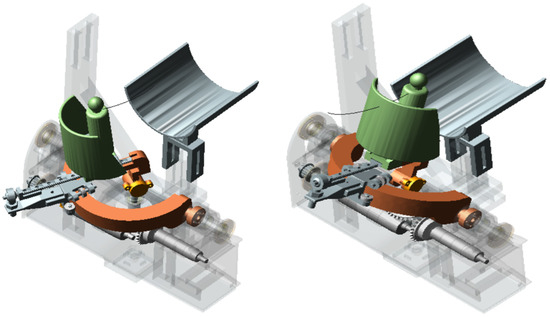
Figure 6.
The two extreme positions during the operation of the virtual model of the ParReEx-wrist robot, corresponding to combined flexion–extension and radial–ulnar motion.
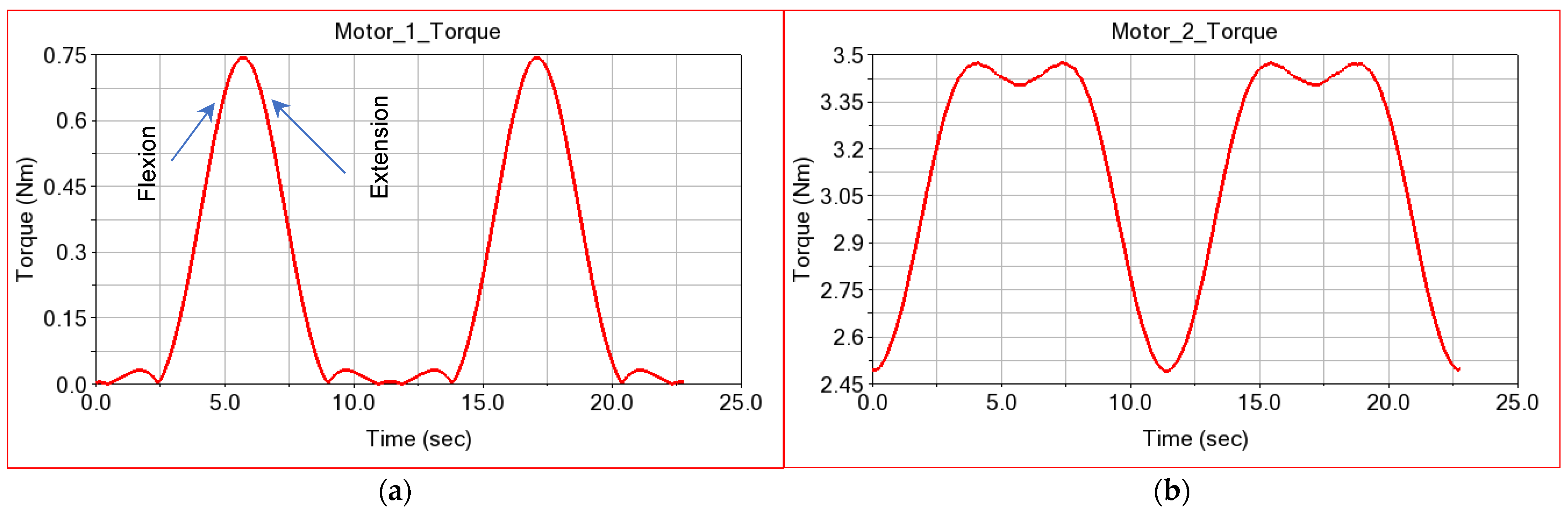
In the first phase, a dynamic simulation with the specified laws of motion and without considering the friction in the kinematic joints of the robot is performed. The results obtained for this simulation—meaning the variations of the motor torque calculated by numerical simulation in ADAMS when simultaneously performing both types of movement: flexion–extension and radial–ulnar motion of the wrist—are presented in Figure 7.
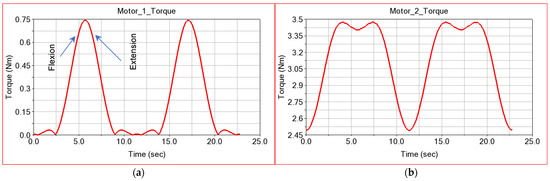
Figure 7.
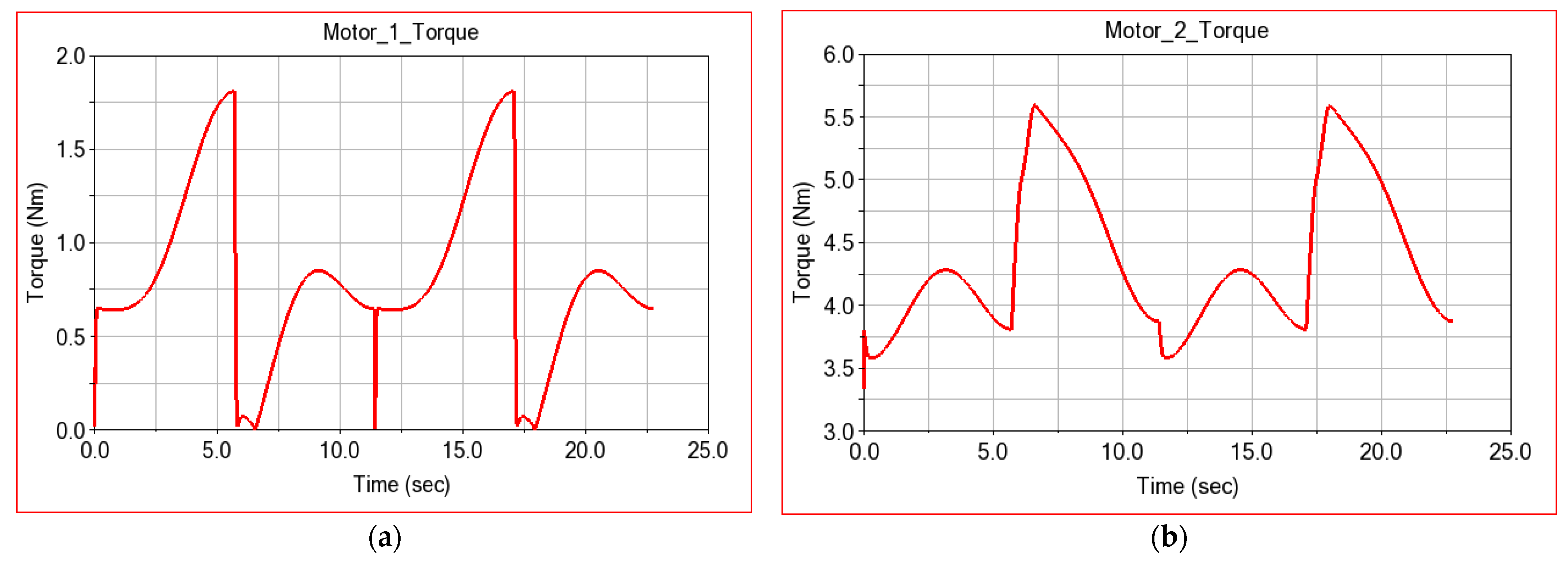
ADAMS simulation computed torque for: (a) the flexion–extension module and (b) the radial–ulnar module.
Analyzing the graph in Figure 7a computed for the flexion–extension motion, it is found that the maximum value of the actuation moment of this flexion/extension module is 0.7436 Nm, while the minimum value is near 0 Nm.
The motor torque obtained by numerical simulation for the radial–ulnar motion (Figure 7b) has a maximum value around 3.4748 Nm and a minimum of 2.47 Nm. In conclusion, the radial–ulnar movement requires an actuation moment greater than about four times the moment required for the flexion–extension movement, so the flexion–extension module will be the most structurally loaded. For the two modules, the graphs of the connecting forces that develop in Joints A, B, R1, R2 and C are presented.
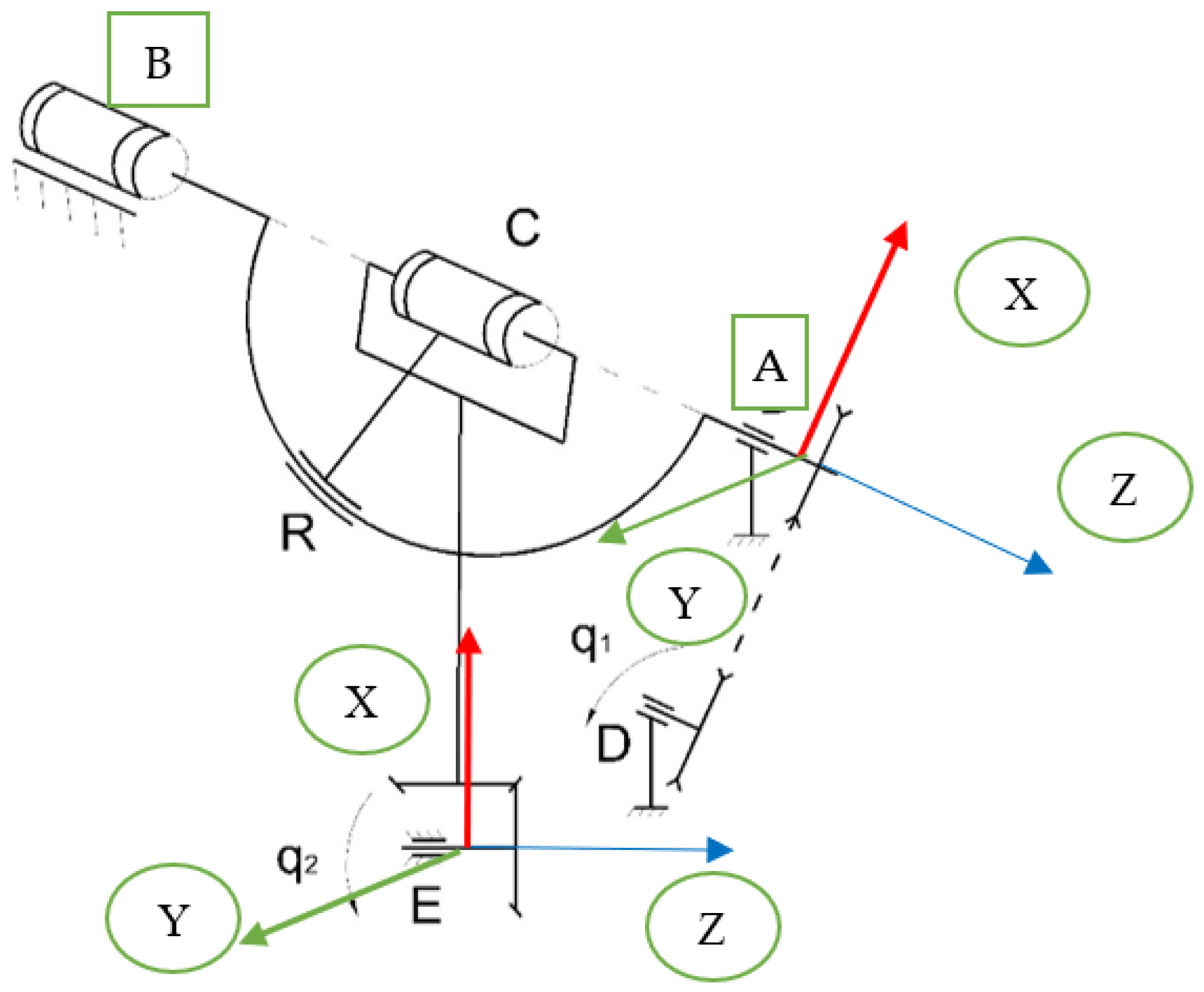
Figure 8 shows the orientation of the local reference axis systems attached to the kinematic torques of the ParReEx robot for clear identification of the components of the connecting forces.
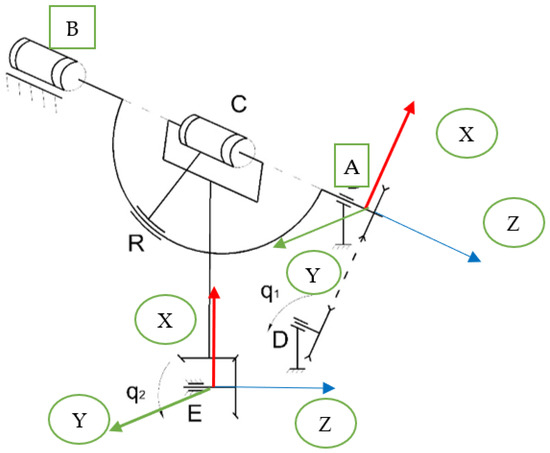
Figure 8.
Positioning of the axes of the kinematic joints of the ParReEx robot.
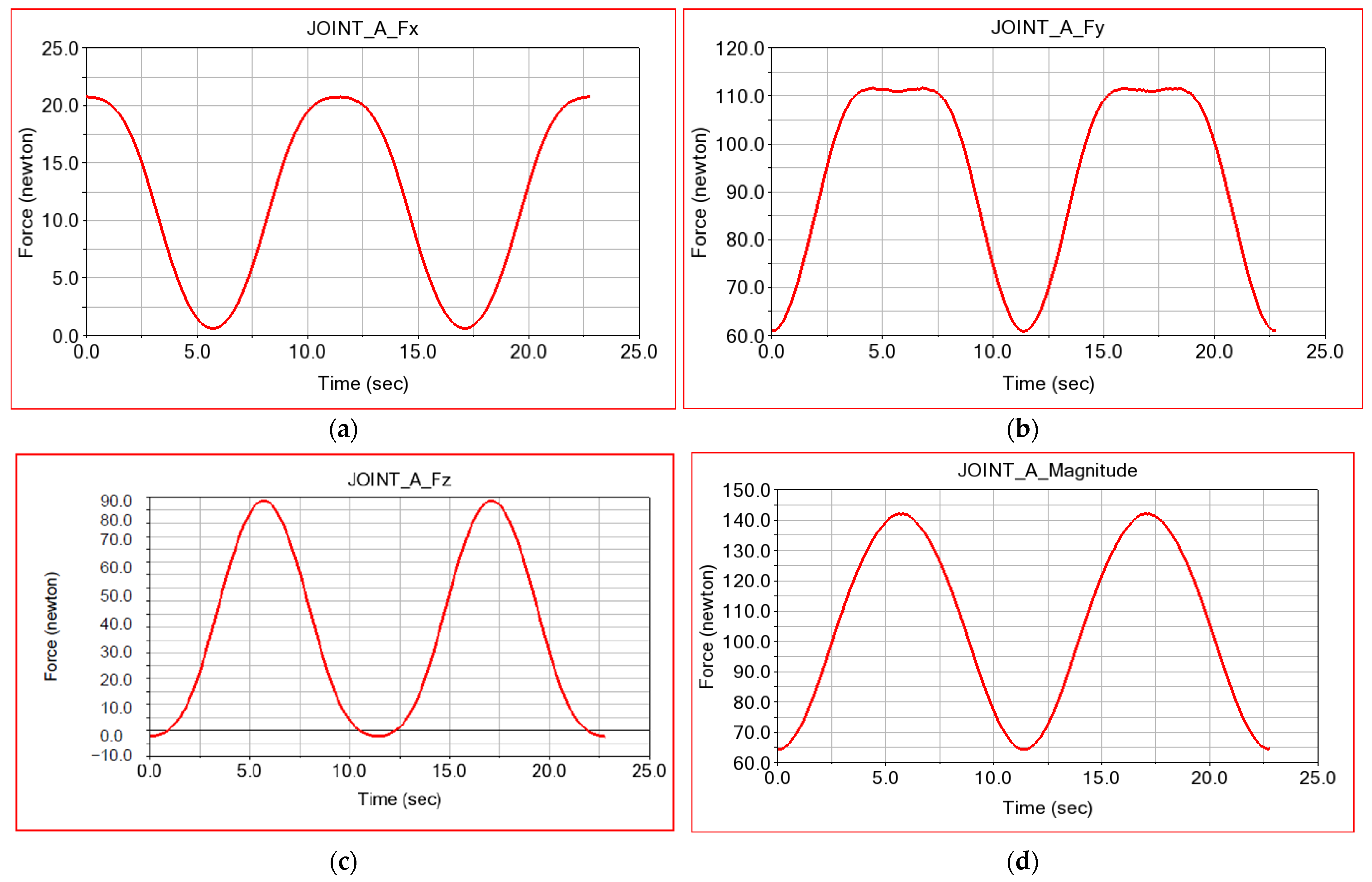
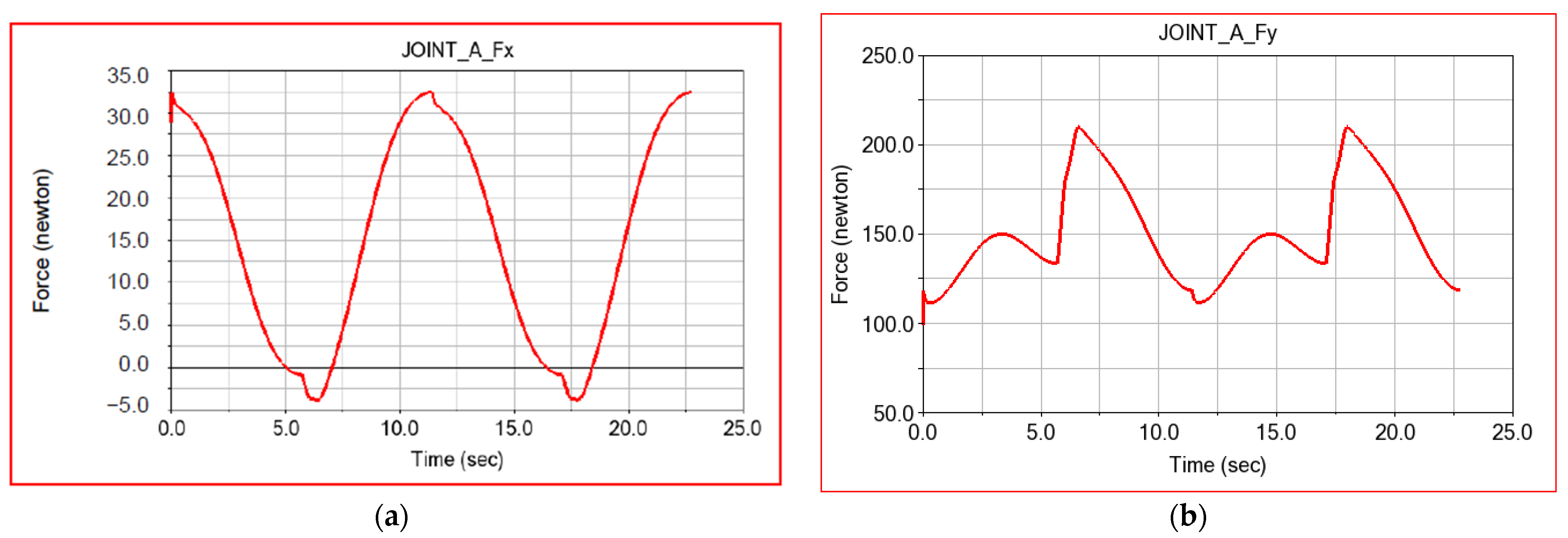
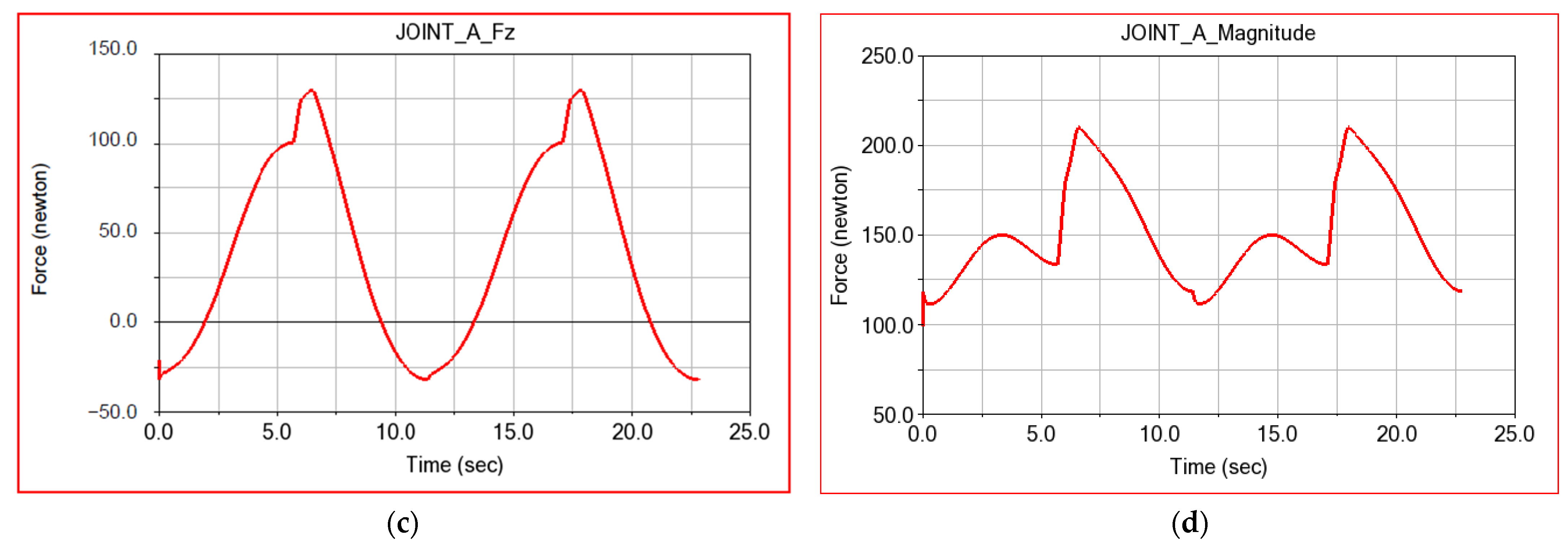
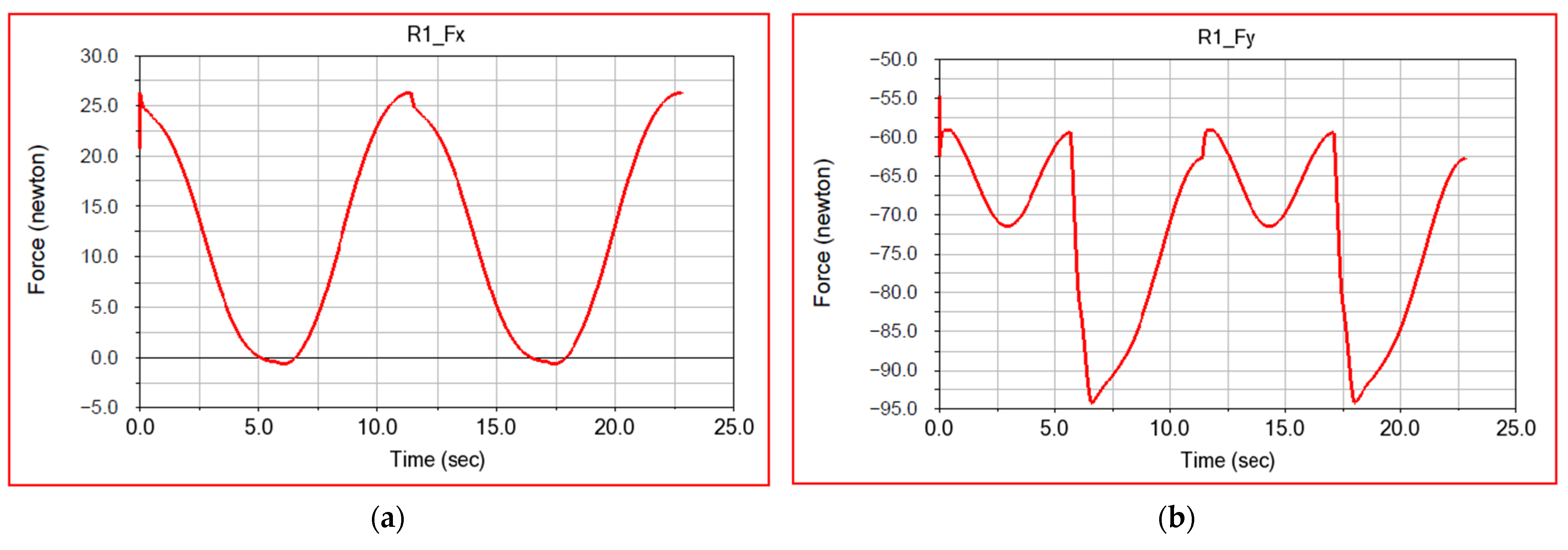
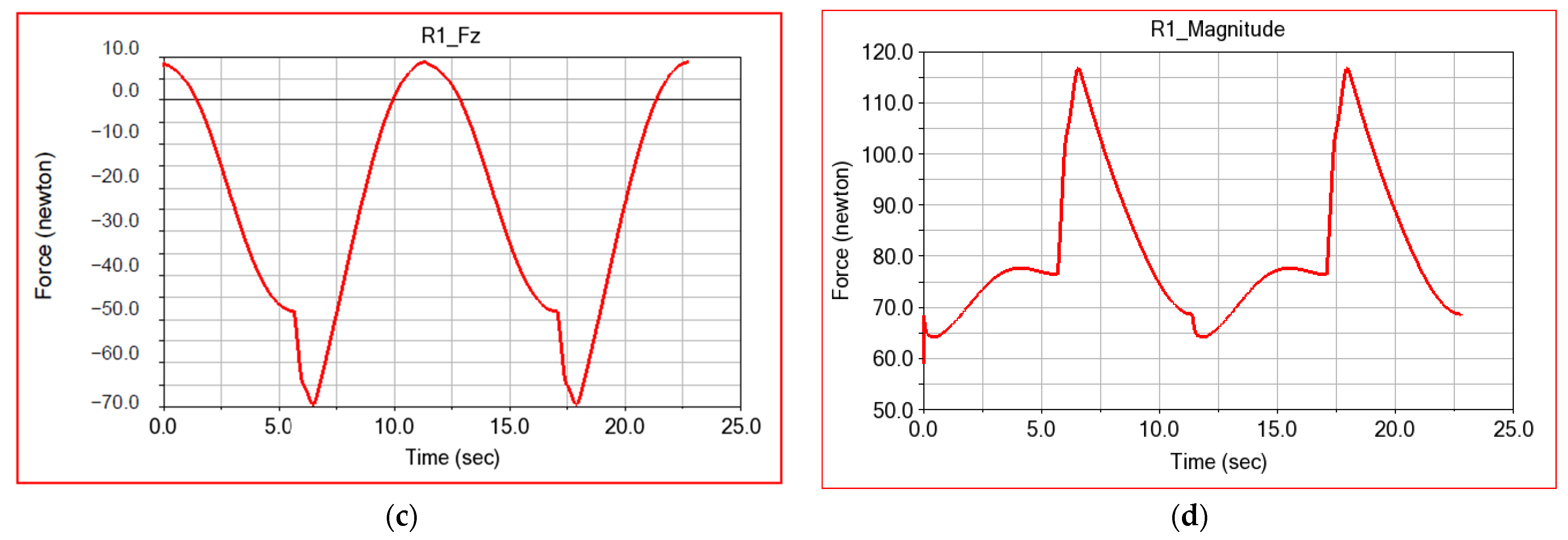
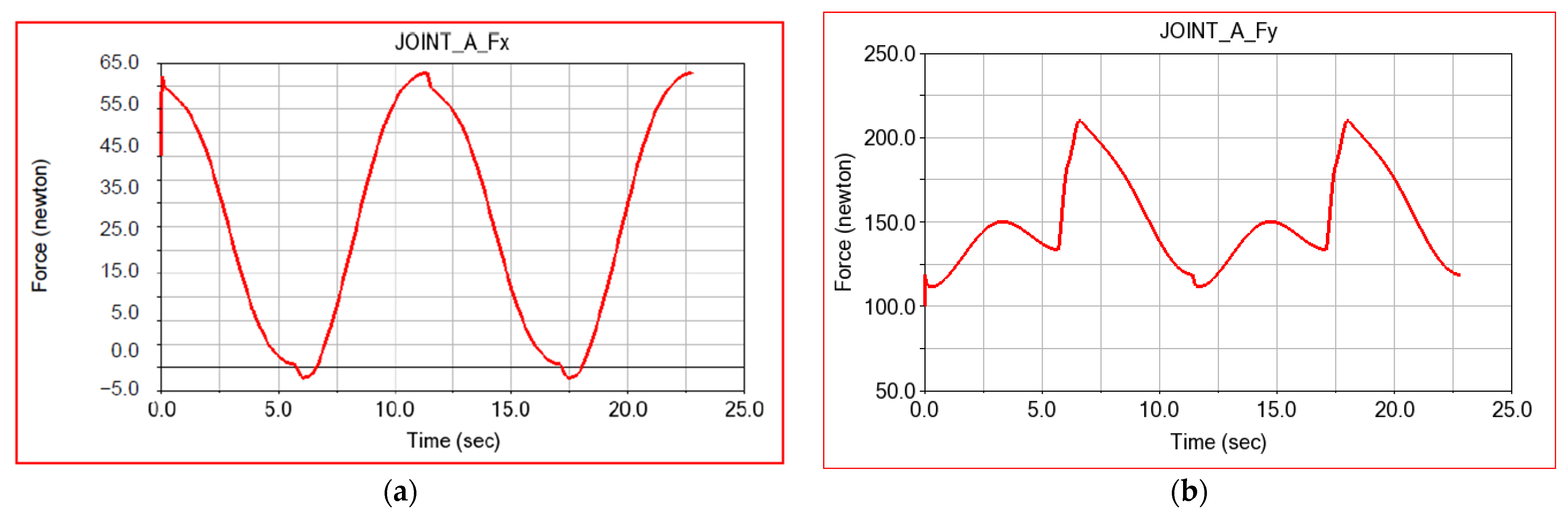
Graphs of time variation for the components of the connecting force in Joint A in relation to the local reference system attached to this joint are shown in Figure 9a–c. Analysis of these graphs shows that the maximum value recorded along the Y-axis of the local reference system in Joint A is 111.7138 N, and the minimum is 60.8693 N, with an RMS (round mean square) equal to 95.1698 N (Figure 9b). The component along the X-axis reaches an absolute maximum value of 20.8049 N, and the minimum value is equal to 0.6315 N, with an RMS of 13.9479 N (Figure 9a). The component along the Z-axis reaches 88.6393 N with an RMS of 49.6273 N (Figure 9c). The value of the resulting force in this joint has a maximum of 142.1042 N and a minimum of 64.3436 N according to Figure 9d.
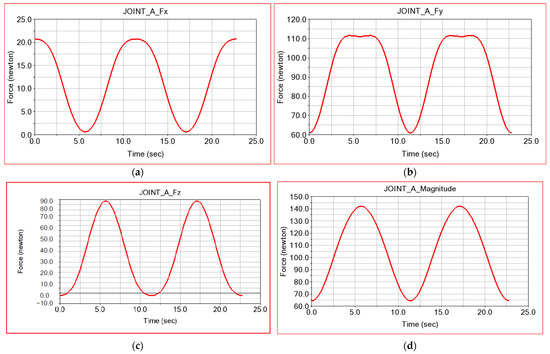
Figure 9.
Connecting forces in rotation Joint A: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
These results are also presented in Table 4.
Table 4.
Joint A connection force components.
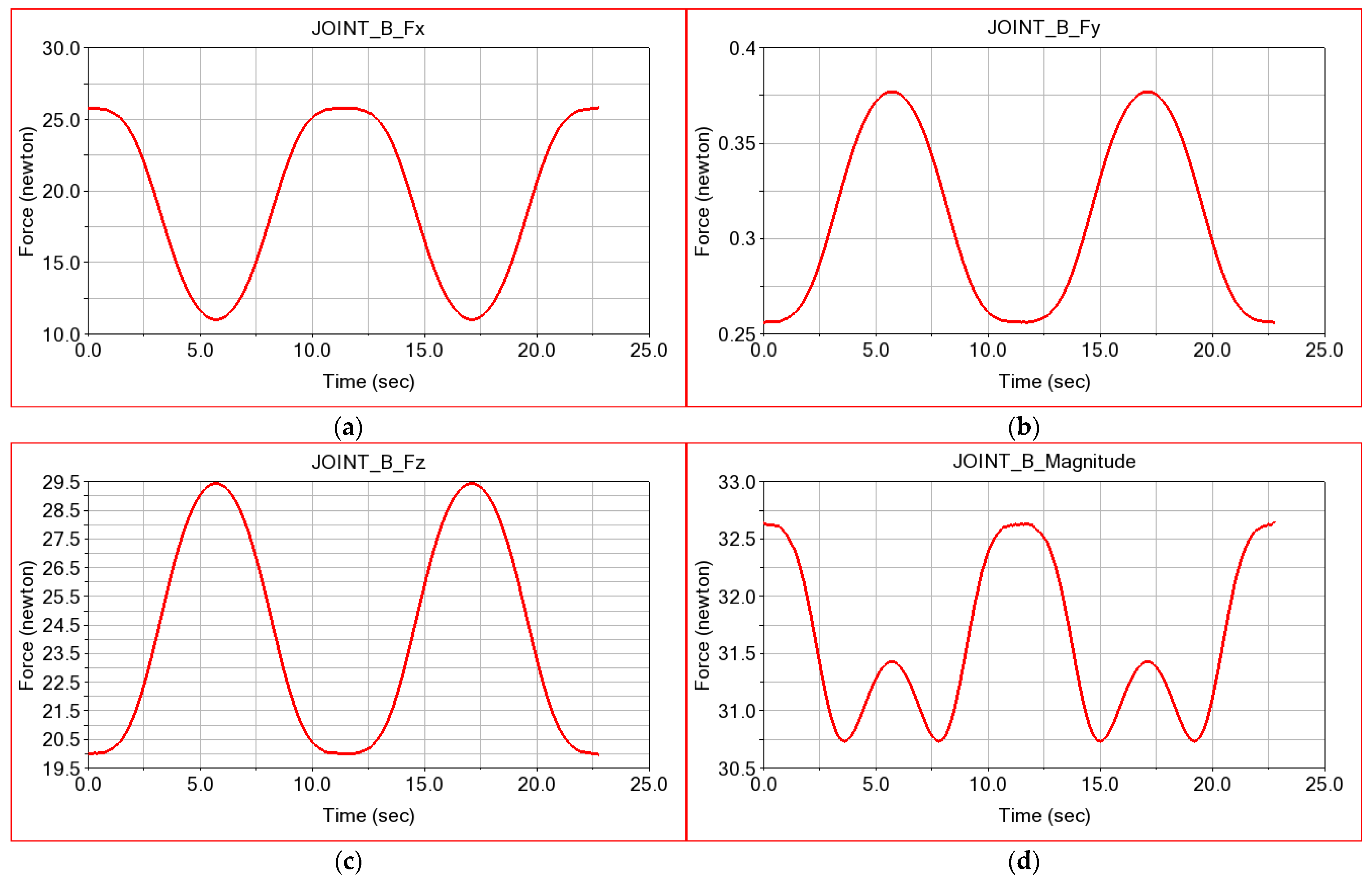
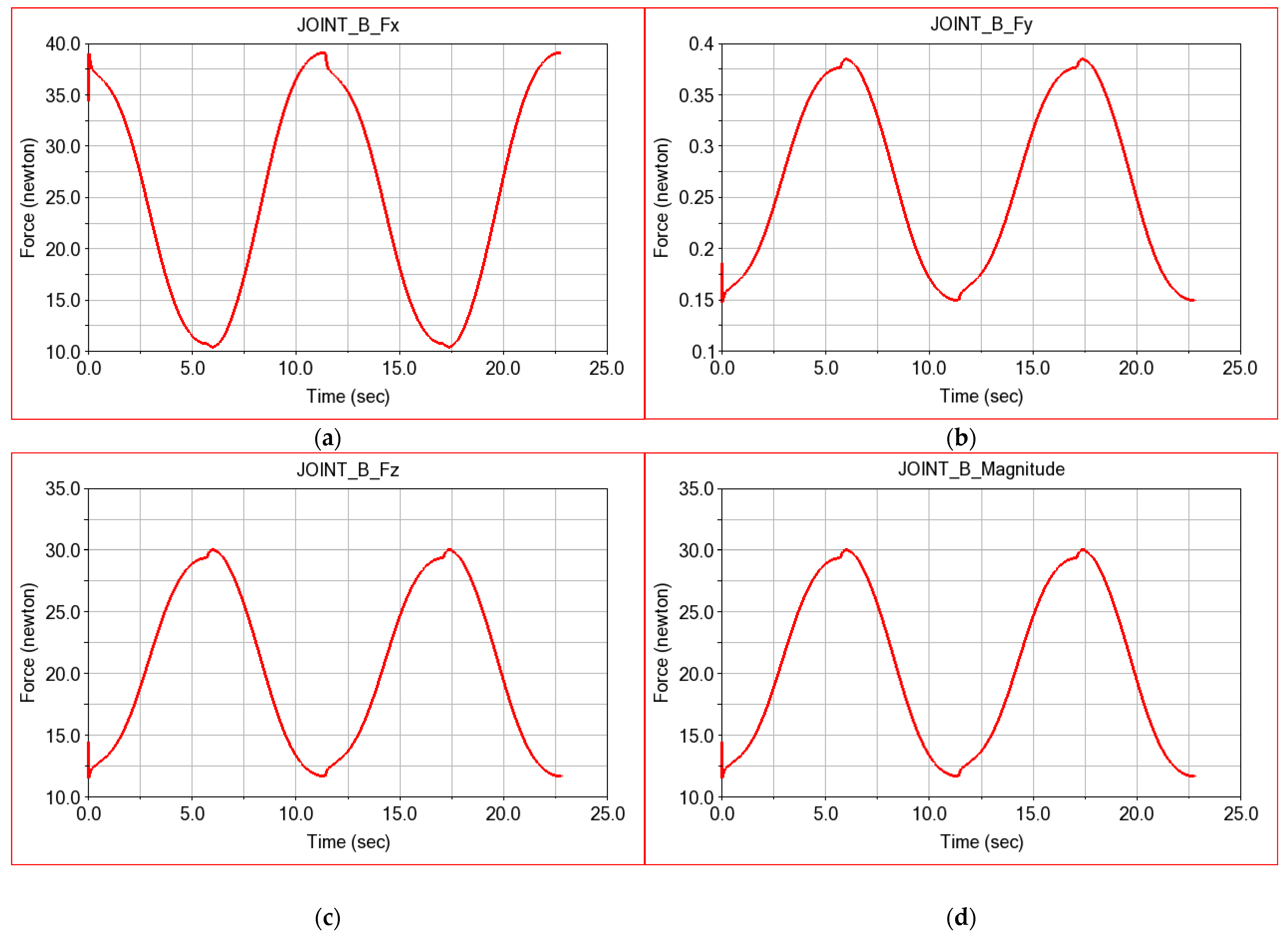
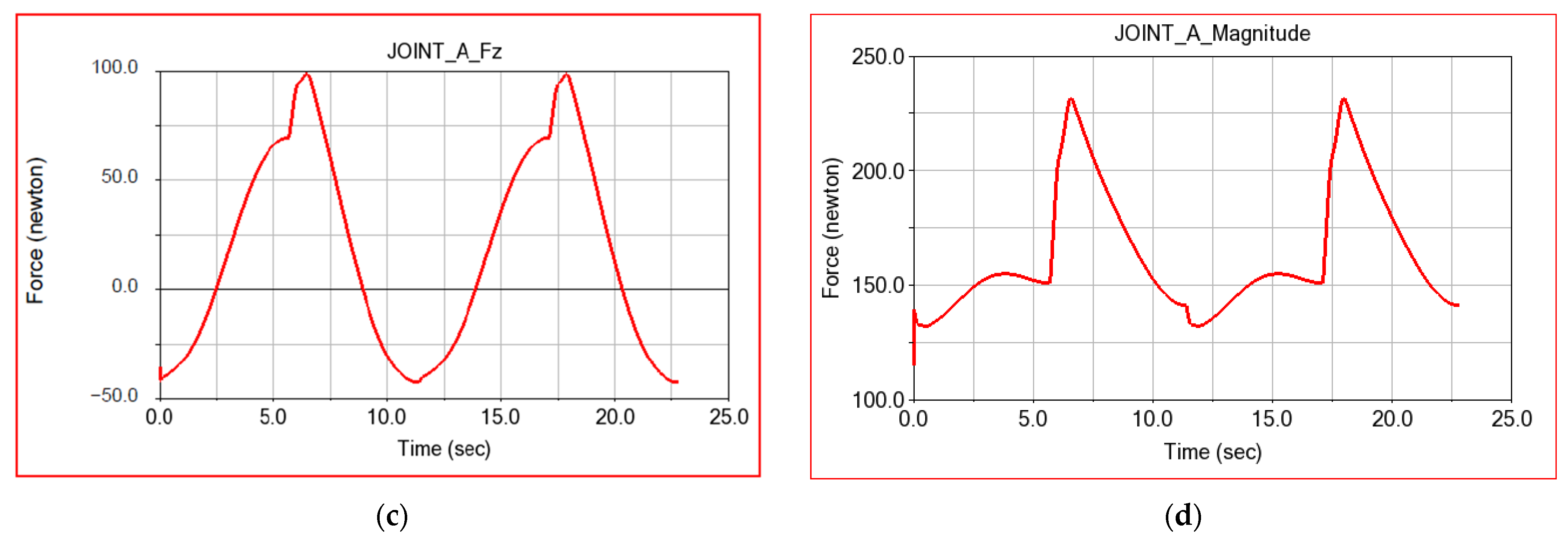
Graphs of time variation for the components of the connecting force in Joint B are shown in Figure 10a–c. The maximum value reported for the X-axis component is 25.8542 N, and the minimum is 11.002 N, with an RMS equal to 20.1699 N (Figure 10a). The Y-axis component has a maximum value equal to 0.3771 N, and the minimum value is equal to 0.2556 N, with an RMS of 0.3118 N (Figure 10b) The component along the Z-axis reaches 29.4384 N with an RMS of 24.3394 N (Figure 10c). The value of the resulting force in this joint reaches a maximum of about 32.6581 N, a minimum of 30.7333 N and an RMS equal to 31.6122 N, as we can see in Figure 10d.
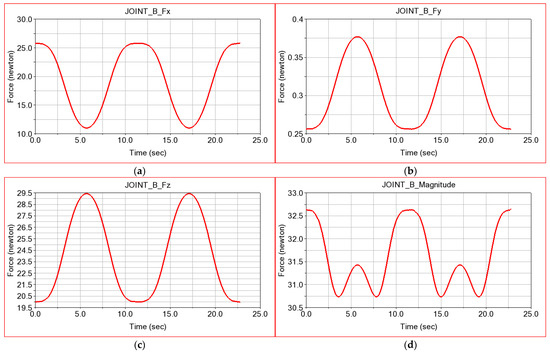
Figure 10.
Connecting forces in rotational Joint B: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
These results are also shown in Table 5.
Table 5.
Joint B connection force components.
There is a higher load distribution on Coupling A, i.e., the RMS value is 3.48 times higher for the force resulting from Joint A.
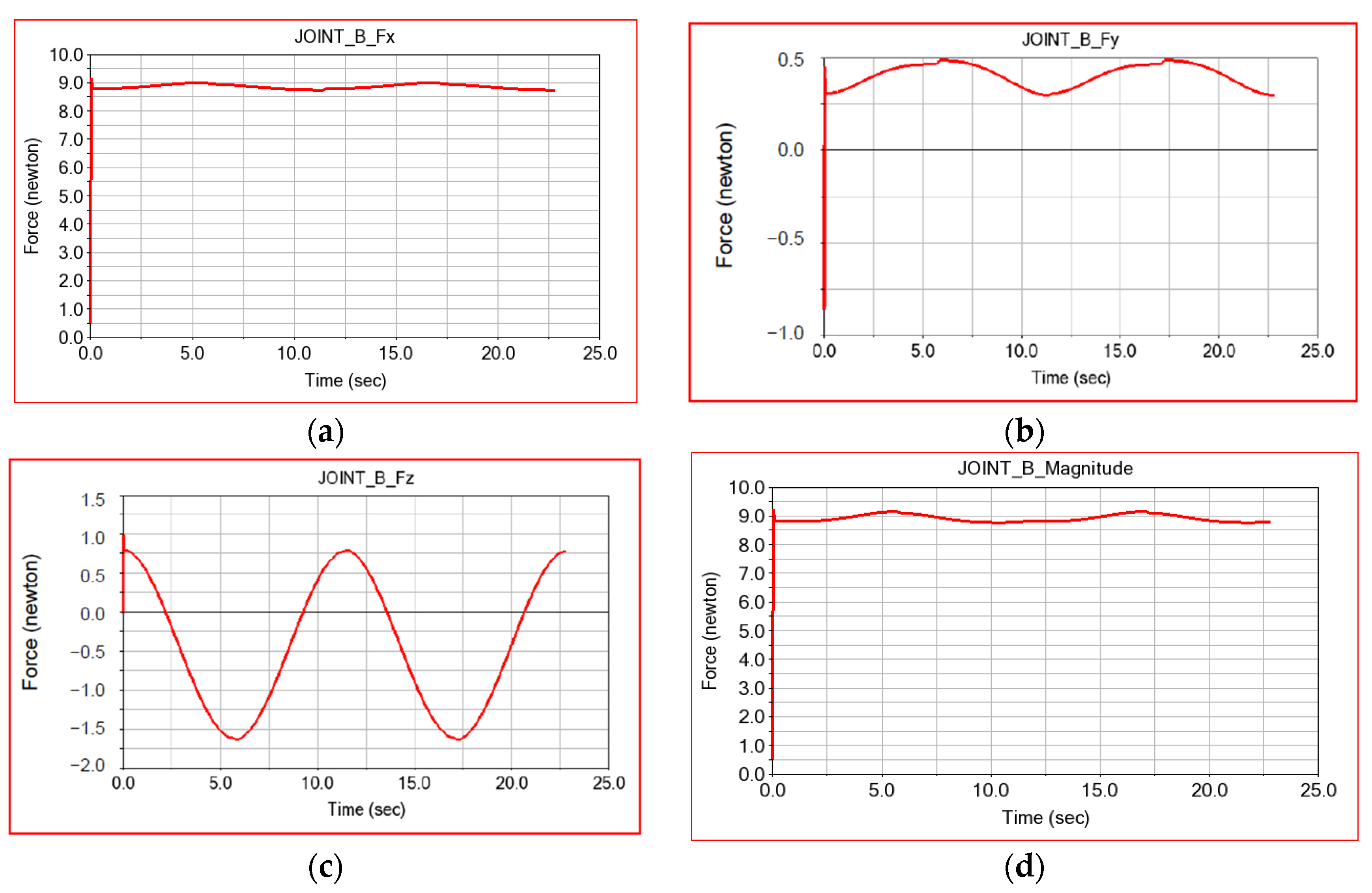
To model the contact between the radial bearings and the rolling path of the circular guide, we defined in ADAMS primitives such as the upper rolling torque between the outer ring of the bearing on the rolling path of the circular guide. The ParReEx robot has four bearings in the structure that make contact between the circular guide and the adjacent element.
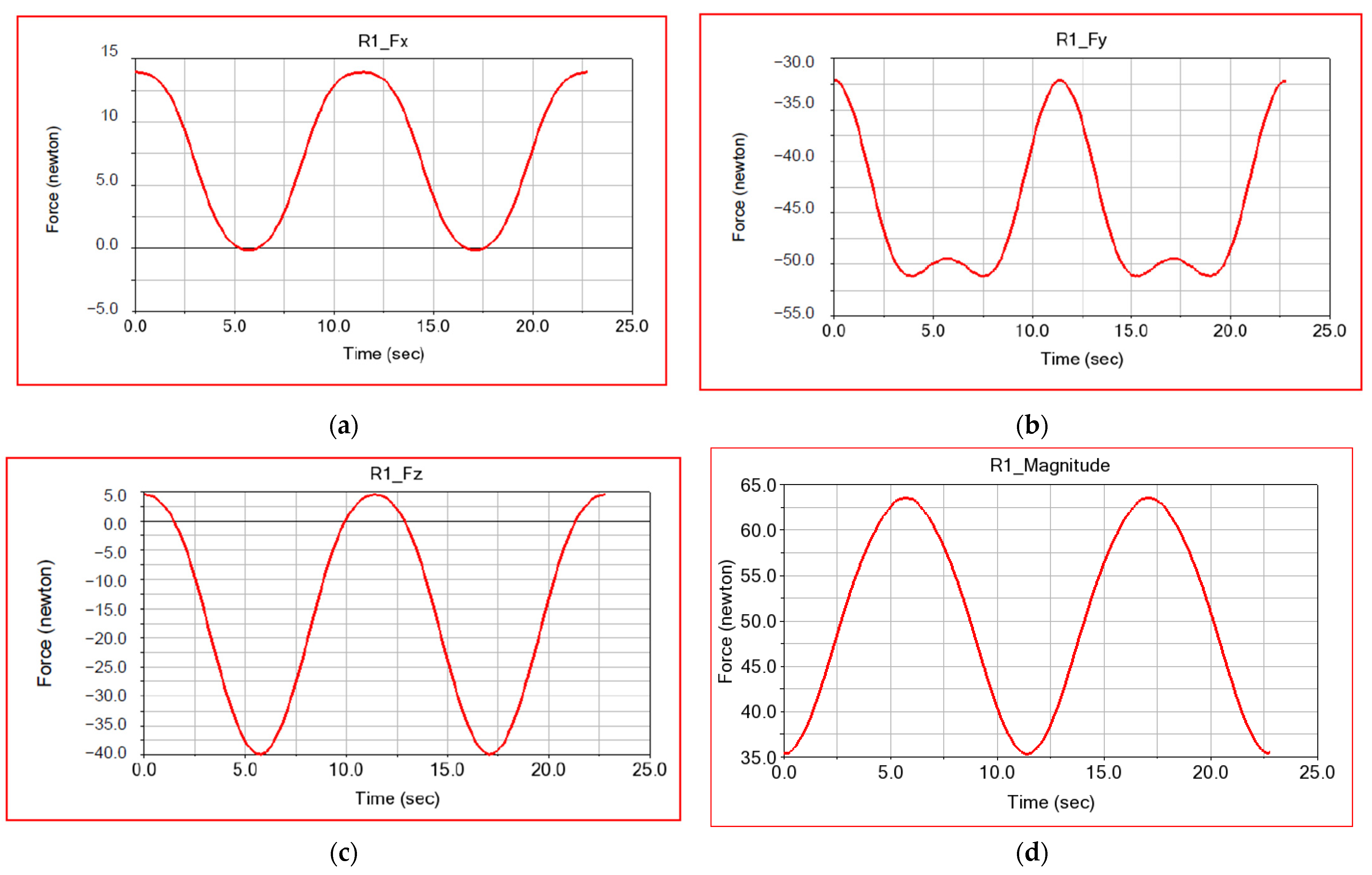
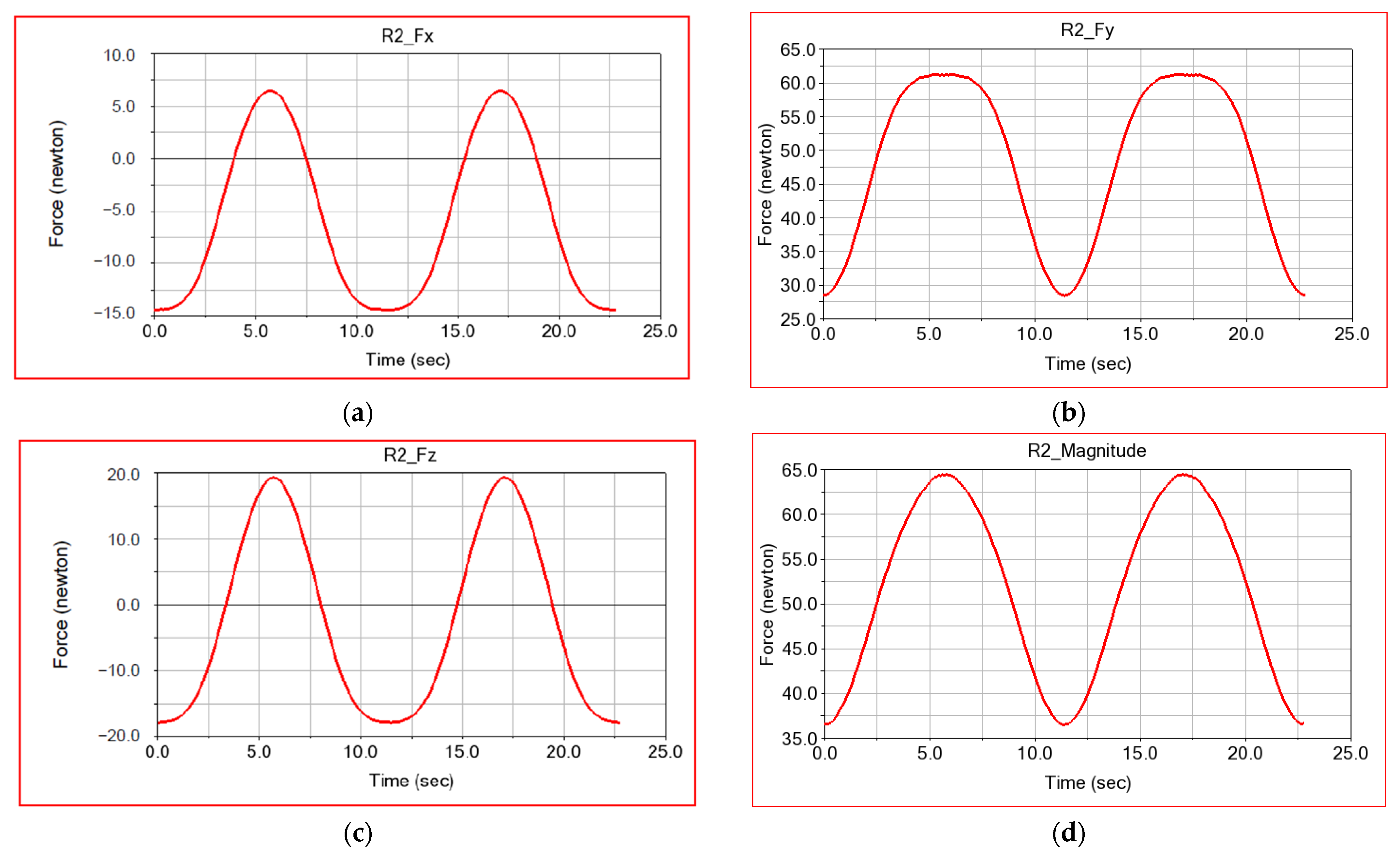
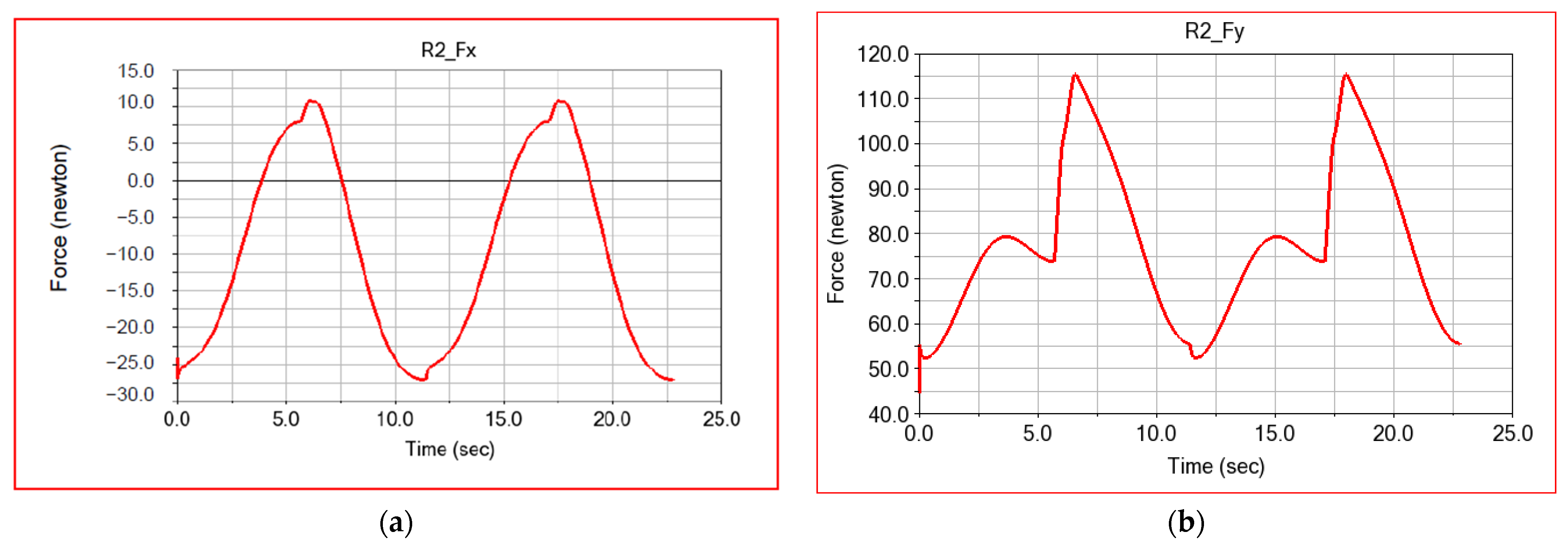
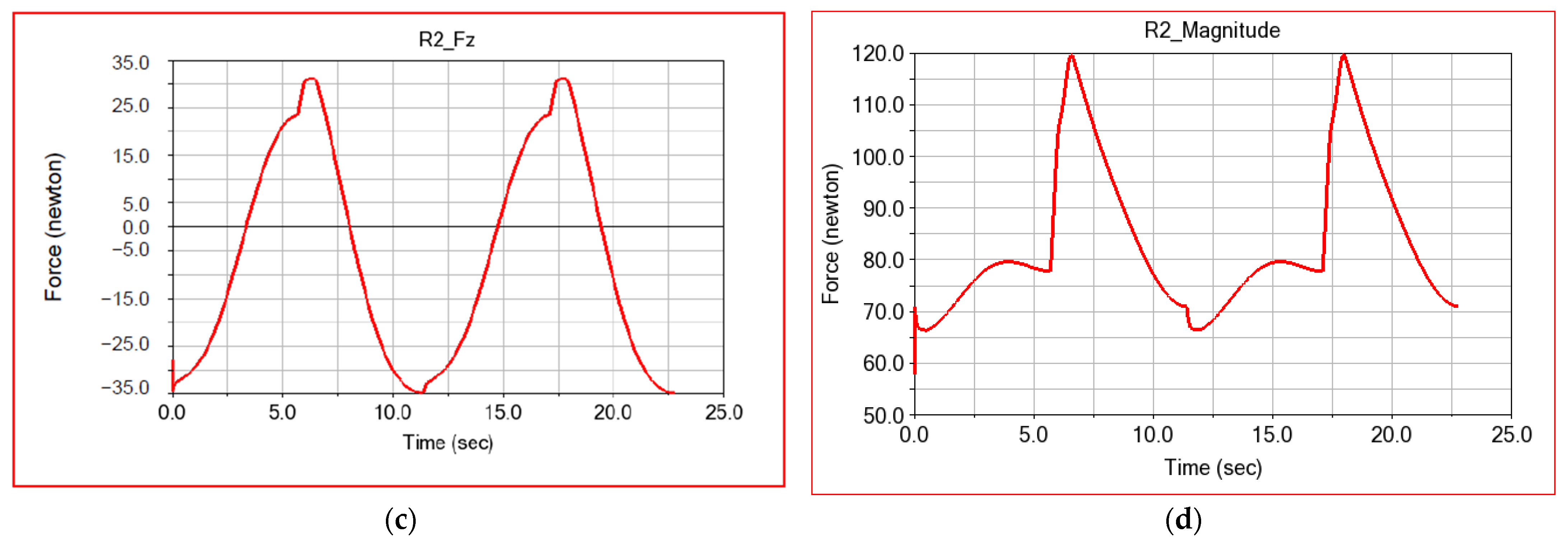
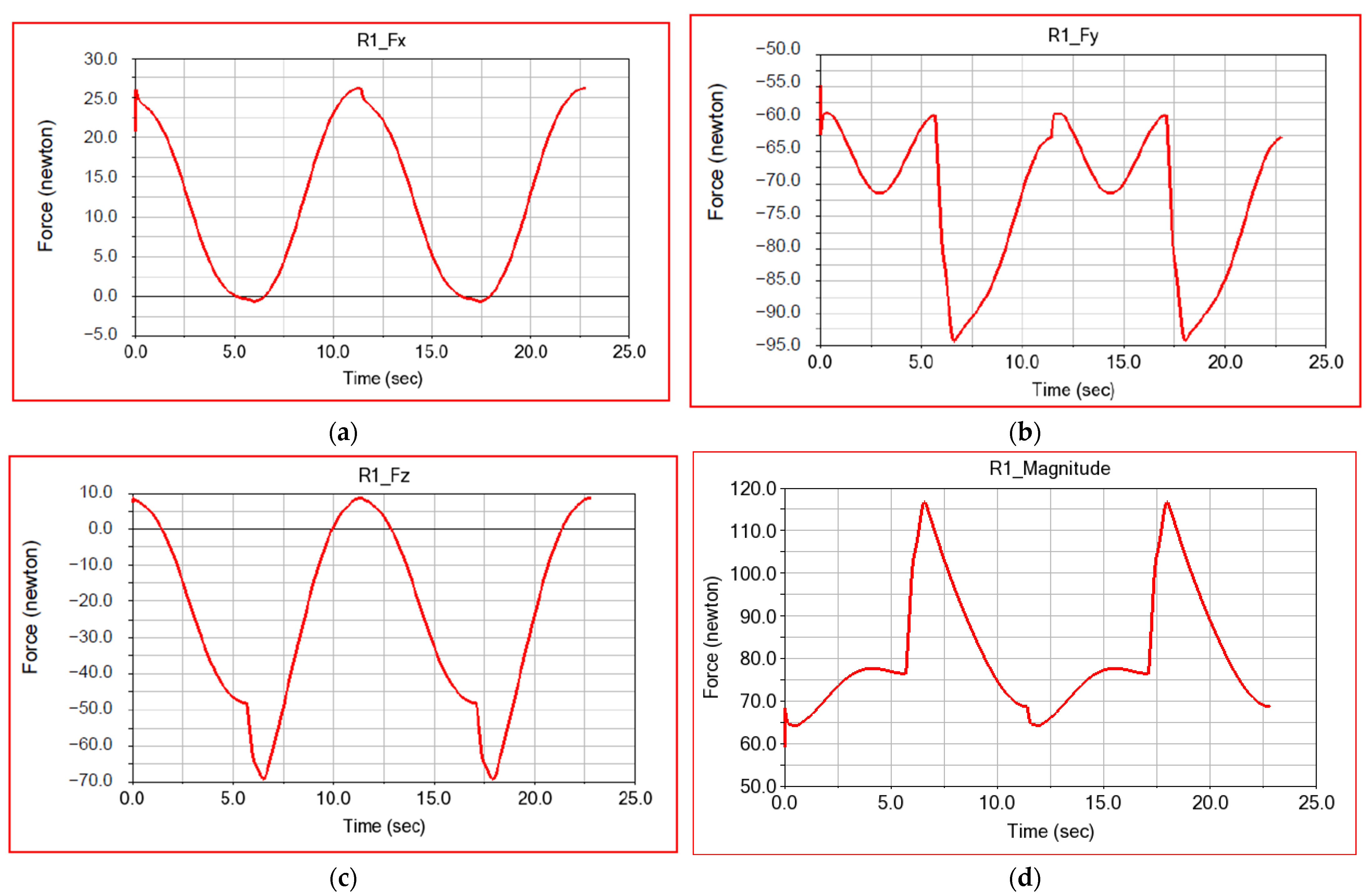
Similar graphs are obtained for Joints R1 and R2 (Figure 11 and Figure 12). The values of these results are presented in tabular form in Table 6 and Table 7.
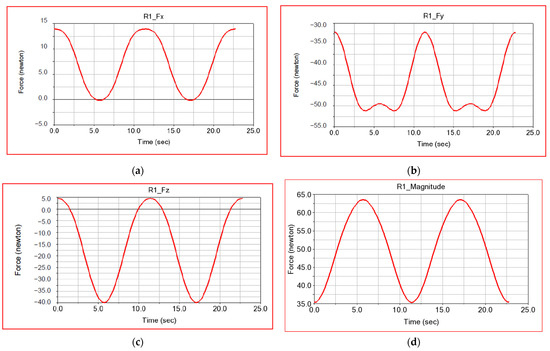
Figure 11.
Connecting forces in rotational Joint R1: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
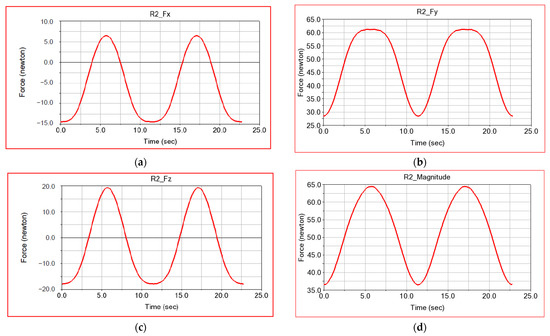
Figure 12.
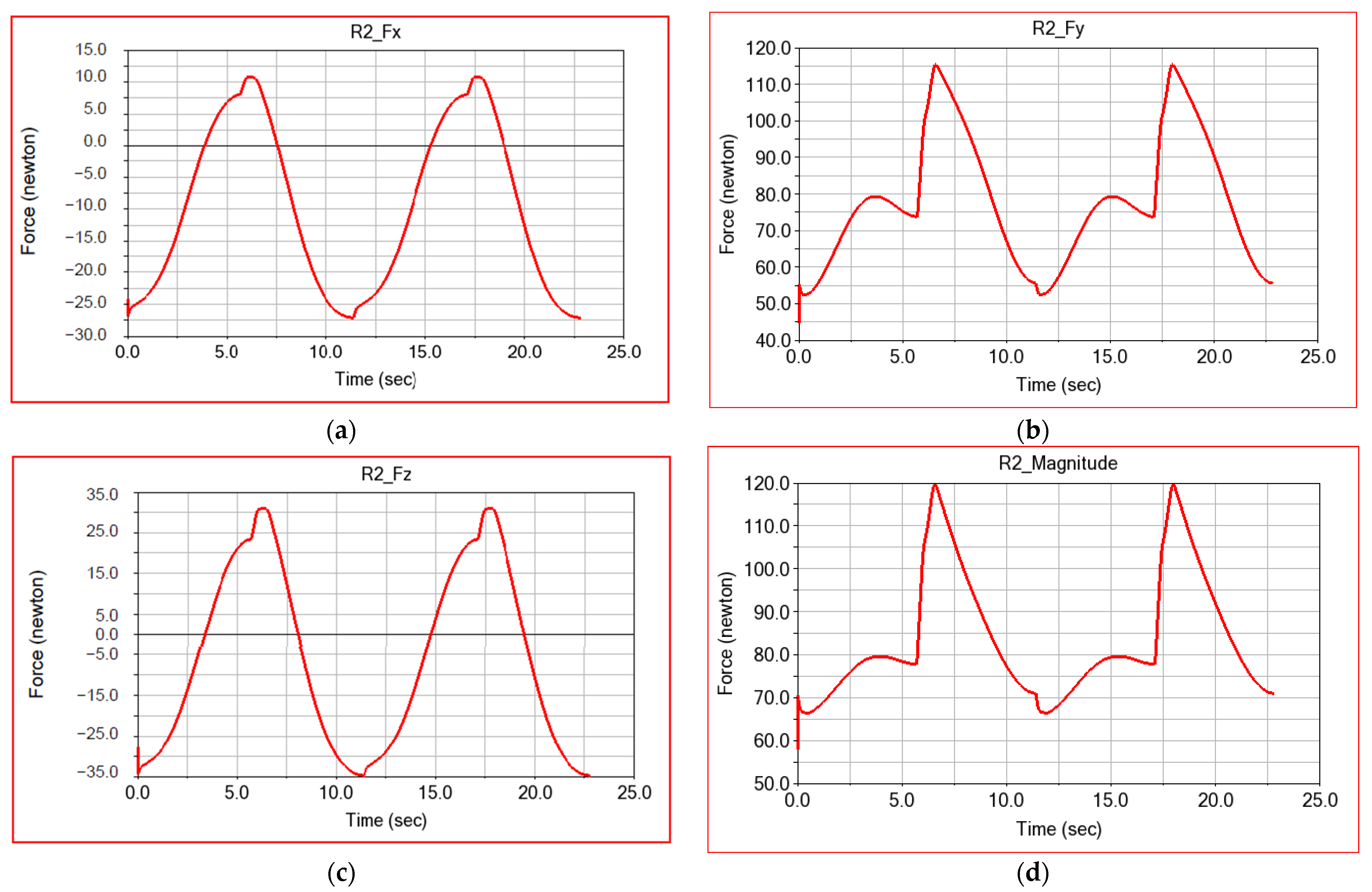
Connecting forces in rotational Joint R2 of the flexion/extension module: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 6.
Joint R1 connection force components.
Table 7.
Joint R2 connection force components.
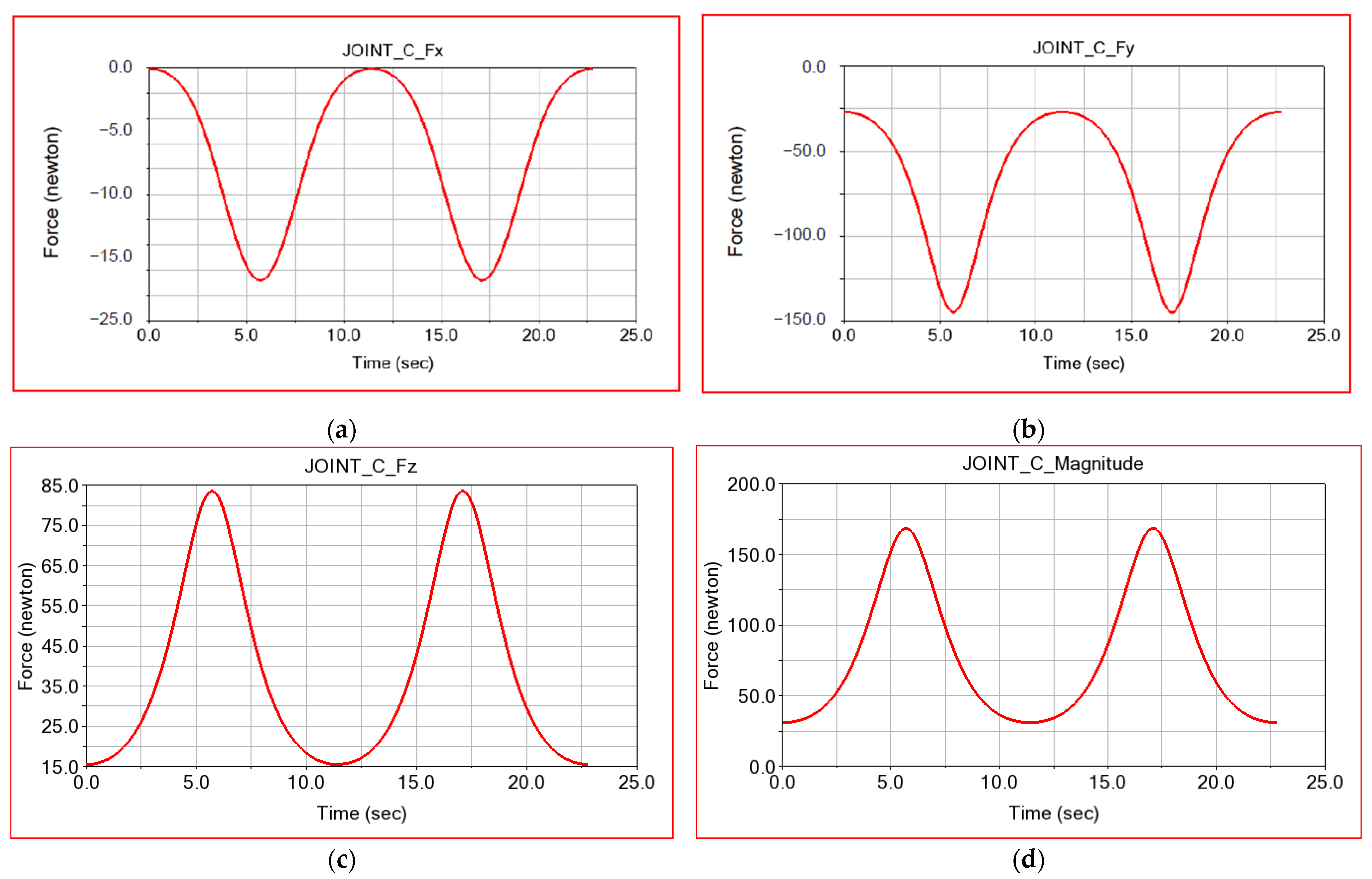
For the situation in which the ParReEx robot is used by a patient and the frictional forces in the kinematic torques are not taken into account, the following results are obtained for the connecting forces in the Joint C, as presented in Figure 13.
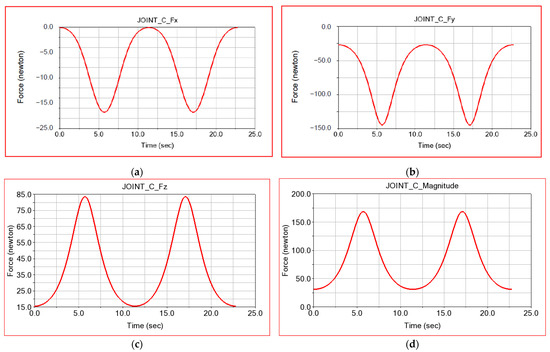
Figure 13.
Connecting forces in rotational Joint C: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 8 shows the values of the components and the resultant reaction in coupling C for the first case of study, i.e., without friction in the coupling and with the kinematic elements considered as rigid solids.
Table 8.
Joint C connection force components.
3.2. Dynamic Analysis in MSC.ADAMS of the ParReEx-Wrist Robot Considering Joint Friction
This subchapter is dedicated to a virtual dynamic study in ADAMS of the actuation moments and the connection forces in the kinematic Joints A, B, C, R1 and R2 considering the friction in the kinematic joints—a case that simulates the real situation and is different from the previous simulation in which simplistic hypotheses were used.
In principle, we are interested in simulating the dynamics of the robot in the context of its use by a patient. Therefore, in all dynamics studies, we consider this context.
To define the parameters required for the study of dynamics considering friction, existing data in the literature were used [50]. The following values were adopted for this study: static friction coefficient of 0.2 and dynamic friction coefficient of 0.15 (Table 9).
Table 9.
Joint friction parameters.
Using numerical simulation in ADAMS considering the friction in joints, results were obtained in the form of laws of variation of the moments necessary to operate the flexion–extension module and the radial–ulnar deviation module (Figure 14).
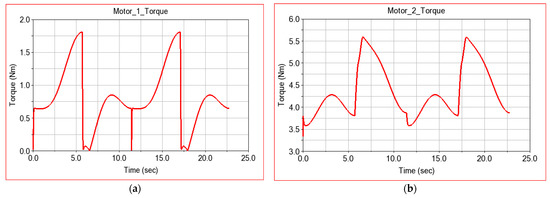
Figure 14.
Second case—ADAMS-simulation-computed torque for: (a) the flexion–extension module and (b) the radial–ulnar deviation module.
Table 10 shows the characteristic values for the actuation moments of the two robot modules for the second case study, namely when we considered the friction in the kinematic couplings.
Table 10.
Robot motion parameters.
There is an increase in the motor torque required to operate the modules in this case, as well as a steeper variation, which is similar to that determined experimentally [18].
The graphs of the laws of variation of the connection forces considering friction as calculated in ADAMS are presented in Figure 15 for Joint A and in Figure 16 for Joint B.
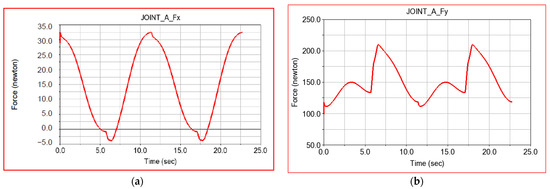
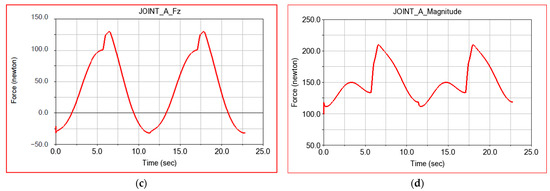
Figure 15.
Connecting forces in rotation Joint A computed with friction consideration: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
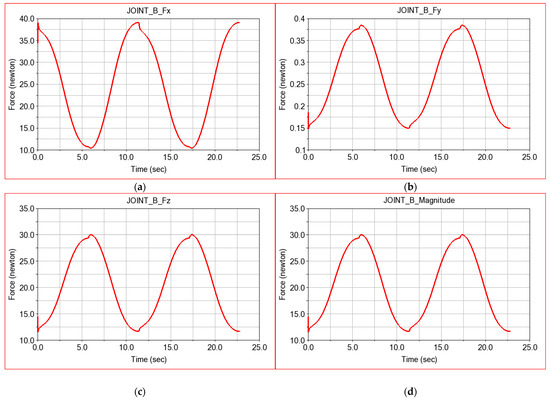
Figure 16.
Connecting forces in Joint B calculated assuming friction: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
The relevant results for the connecting force in Coupling A and its components are also given in Table 11.
Table 11.
Joint A connection force components.
We compare the results of the second simulation in the Discussion. The results obtained for Joint B in Case 2 are presented in Table 12.
Table 12.
Joint B connection force components.
To model the contact between the radial bearings and the circular guideway, we defined in ADAMS superior rolling couplings of the outer ring of the bearing on the circular guideway. The ParReEx robot has four bearings that ensure contact between the circular guide and the conjugate element.
Figure 17 shows the numerical results obtained by numerical simulation in ADAMS. View for the connection forces in the R1 coupling.
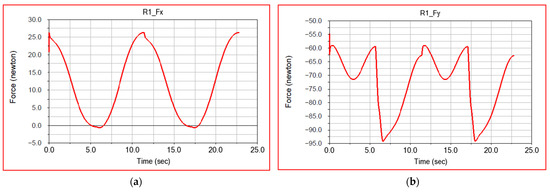
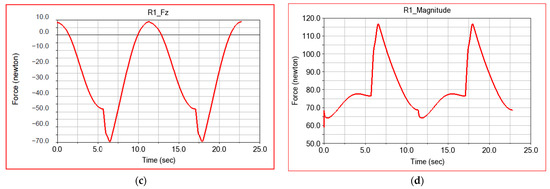
Figure 17.
Connecting forces in rotational Joint R1: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 13 shows the values of the components of the connection forces as well as the resulting reaction in the kinematic joint R1 for the second case study.
Table 13.
Joint R1 connection force components.
Figure 18 shows the numerical results obtained by numerical simulation in ADAMS. View for the connection forces in the R2 coupling.
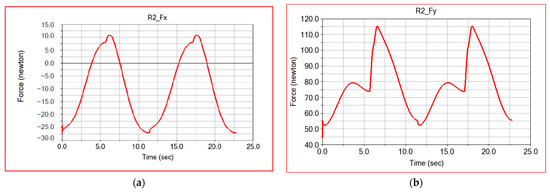
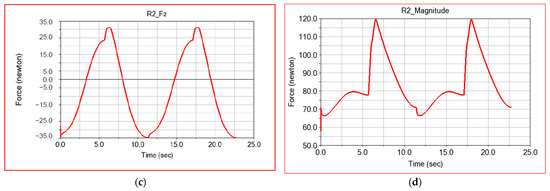
Figure 18.
Connecting forces in rotational Joint R2: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 14 shows the values of the components of the connection forces as well as the resulting reaction in the kinematic joint R2 for the second case study.
Table 14.
Joint R2 connection force components.
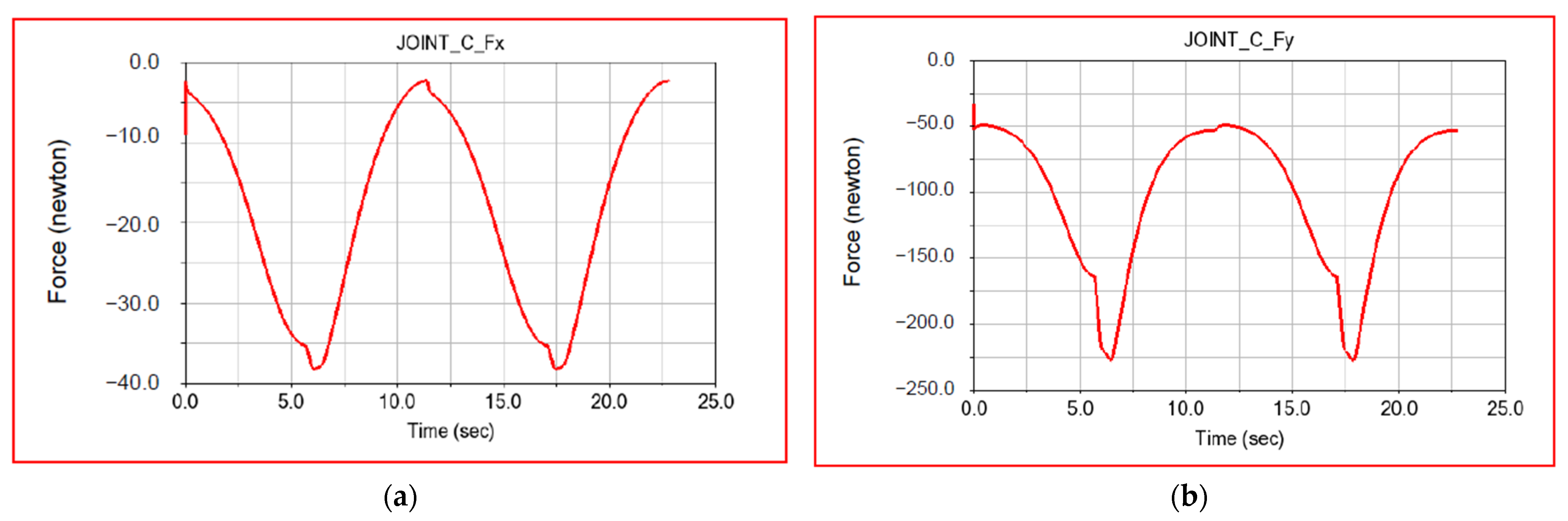
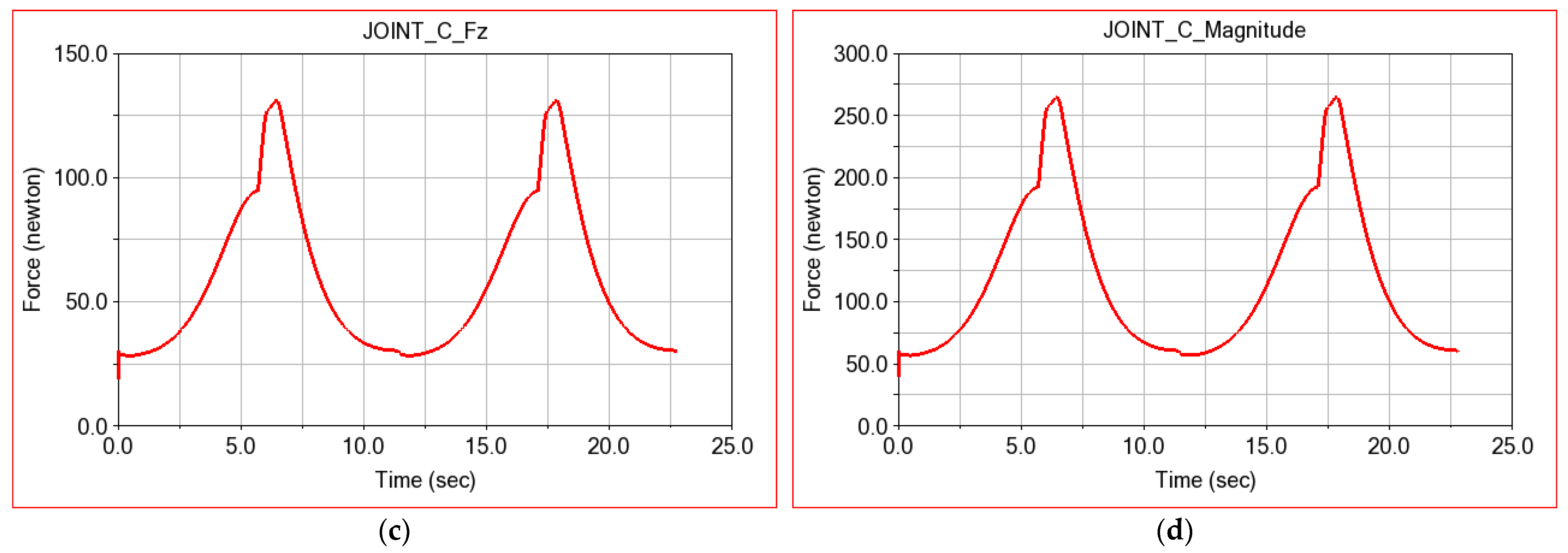
For the situation when the ParReEx robot is used by a patient and we consider the frictional forces in the kinematic joints, the following results are obtained for connecting forces in Joint C, as presented in Figure 19.
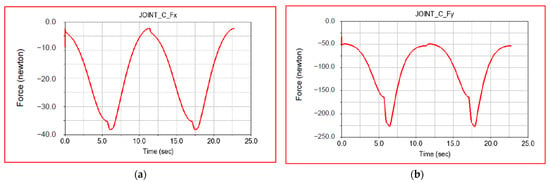
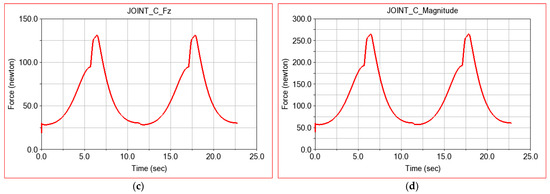
Figure 19.
Connecting forces in rotational Joint C: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 15 shows the values of the components of the connection forces as well as the resulting reaction in the kinematic joint C for the second case study.
Table 15.
Joint C connection force components.
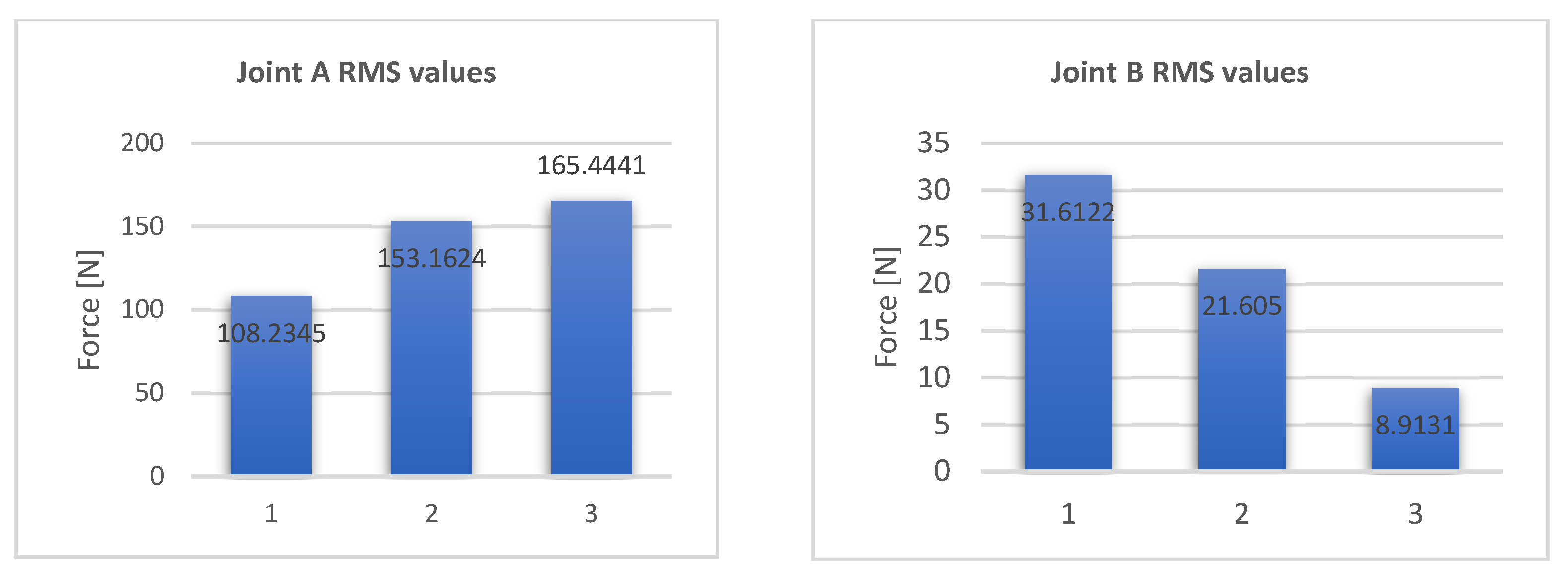
For Joint A, the maximum RMS values increase from 108.2345 N in Case 1 (no joint friction) to 153.1624 N in Case 2 (with joint friction).
Numerical simulation in ADAMS is performed for the manikin-robot rehabilitation assembly considering friction in the rotating joints. The connection forces in the joints have obvious increases compared to the previously studied cases because friction plays an important role in the real operation of the robot.
3.3. Dynamic Analysis in MSC.ADAMS of the ParReEx-Wrist Robot Considering Flexible Elements and Joint Friction
This subchapter is dedicated to the virtual dynamic study in ADAMS of the actuation moments and the connection forces in kinematic joints A, B, C, R1 and R2 considering friction in the kinematic joints and element flexibility, a case that simulates the real situation and is different from the first one, in which simplifying hypotheses have been used.
This simulation assumption is necessary because, in operation, the robot elements deform, and this influences the dynamic operating parameters. The way to transform a rigid body into a deformable one in ADAMS involves:
- -
- Discretizing the body into finite elements and performing modal dynamics analysis, in which vibration modes are calculated based on modal superposition;
- -
- Dynamic analysis considering the solid deformable body;
- -
- Determination of torsional and flexural deformations of the flexible body.
Table 16 shows the vibration modes of the flexible element, namely the circular guide. Since in operation this element has the highest elasticity, it is very important to study the dynamics of the robot considering this circular guide as a deformable solid. Figure 20 shows that Vibration Mode 8 is flexural and occurs at 1538 Hz. Vibration modes consider the external connections of the element and can be flexural, torsional or a combination of the two.
Table 16.
Circular guide modal parameters.
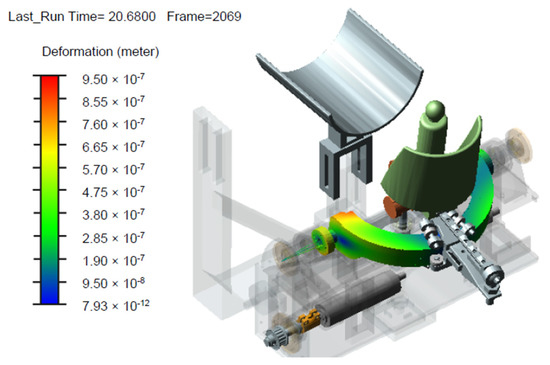
Figure 20.
The deformable body in ADAMS and view of body deformation map.
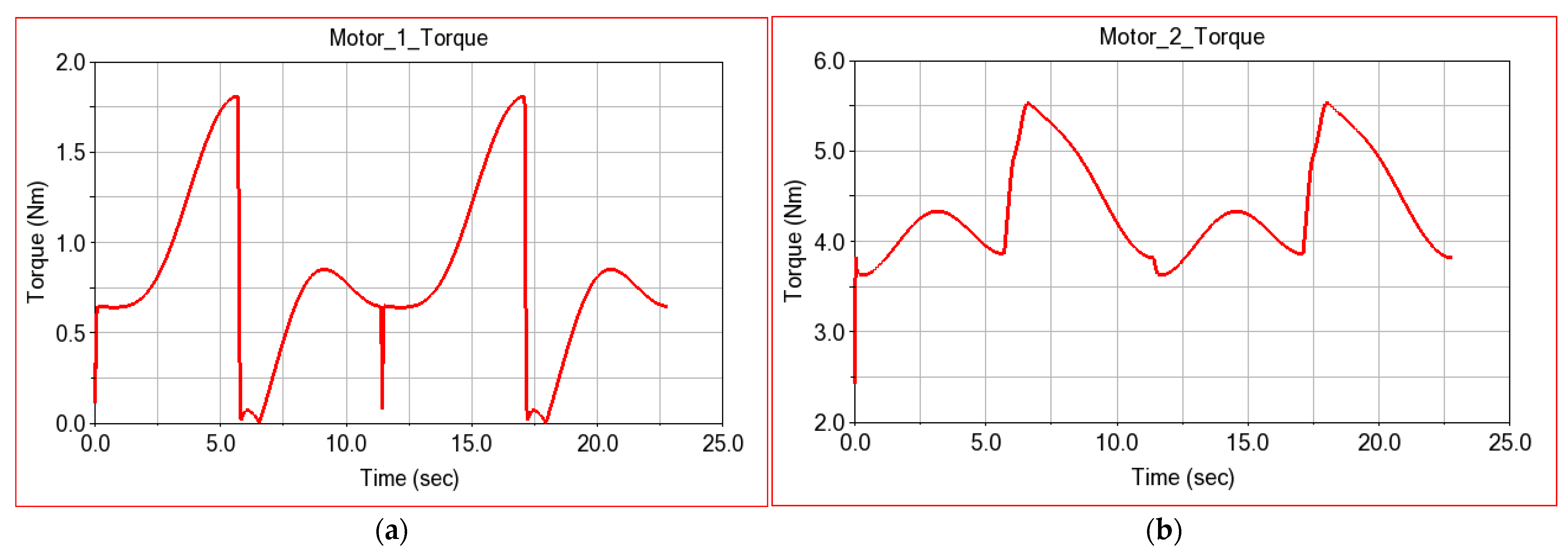
Numerical simulation in ADAMS considering the friction in joints and the flexibility of the circular guide element resulted in laws of variation of the torque necessary to operate the flexion–extension module as well as the radial–ulnar module (Figure 21).
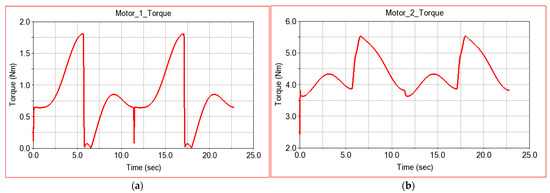
Figure 21.
The laws of variation of computed torque for: (a) the flexion–extension module and (b) the radial–ulnar module.
There is an increase in the motor torque required to operate the modules in this case as well as a steeper variation, similar to values determined experimentally [18].
In Table 17, the characteristic values for the actuation moments of the two modules of the robot are presented for case 3 of the study, i.e., considering the flexibility of the elements and the friction in the couplings.
Table 17.
Robot motion parameters in Case 3.
Figure 22 shows the laws of variation for the components of the connection forces in coupling A as well as for the resultant reaction. These results are obtained in case 3 of the simulation, i.e., the one in which we considered simultaneously the friction in the kinematic couplings and the flexibility of the elements.
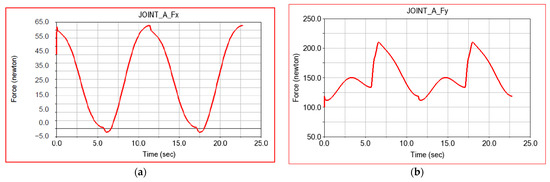
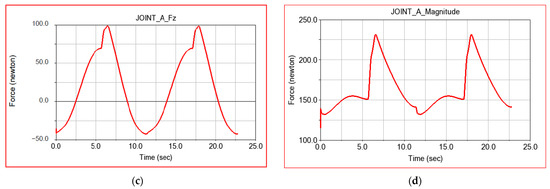
Figure 22.
Connecting forces in rotation Joint A computed with friction and flexible links: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 18 shows the numerical results obtained for the components of the forces and the resulting reaction in joint A for simulation case 3.
Table 18.
Joint A connection force components.
Figure 23 shows the laws of variation for the components of the connection forces in coupling B as well as for the resultant reaction, for the third simulation case.
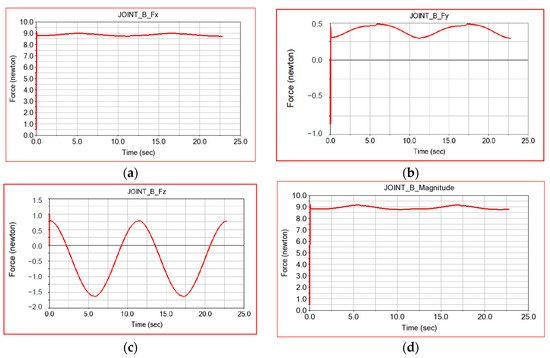
Figure 23.
Connecting forces in Joint B calculated assuming friction and flexible links: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 19 shows the numerical results obtained for the components of the forces and the resulting reaction in joint B for simulation case 3.
Table 19.
Joint B connection force components.
Figure 24 shows the laws of variation for the components of the connection forces in coupling R1 as well as for the resultant reaction, for the third simulation case.
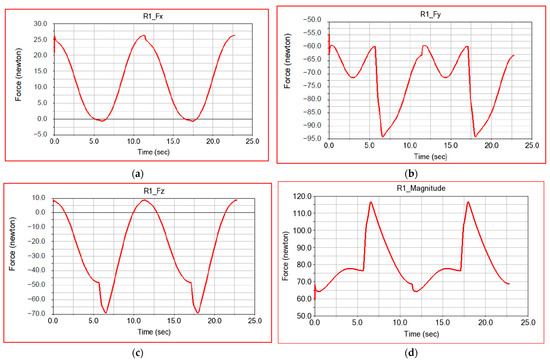
Figure 24.
Connecting forces in rotational Joint R1 in Case 3: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 20 shows the numerical results obtained for the components of the forces and the resulting reaction in joint R1 for simulation case 3.
Table 20.
Joint R1 connection force components.
Figure 25 shows the laws of variation for the components of the connection forces in coupling R2 as well as for the resultant reaction, for the third simulation case.
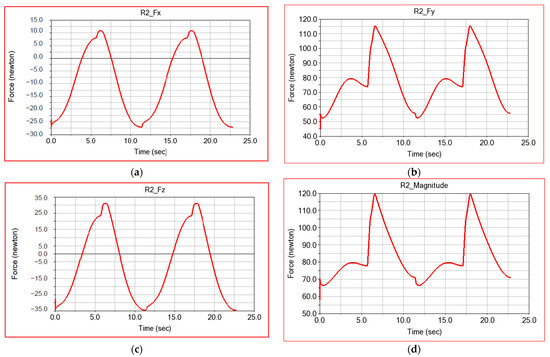
Figure 25.
Connecting forces in rotational Joint R2 in Case 3: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 21 shows the numerical results obtained for the components of the forces and the resulting reaction in joint R2 for simulation case 3.
Table 21.
Joint R2 connection force components.
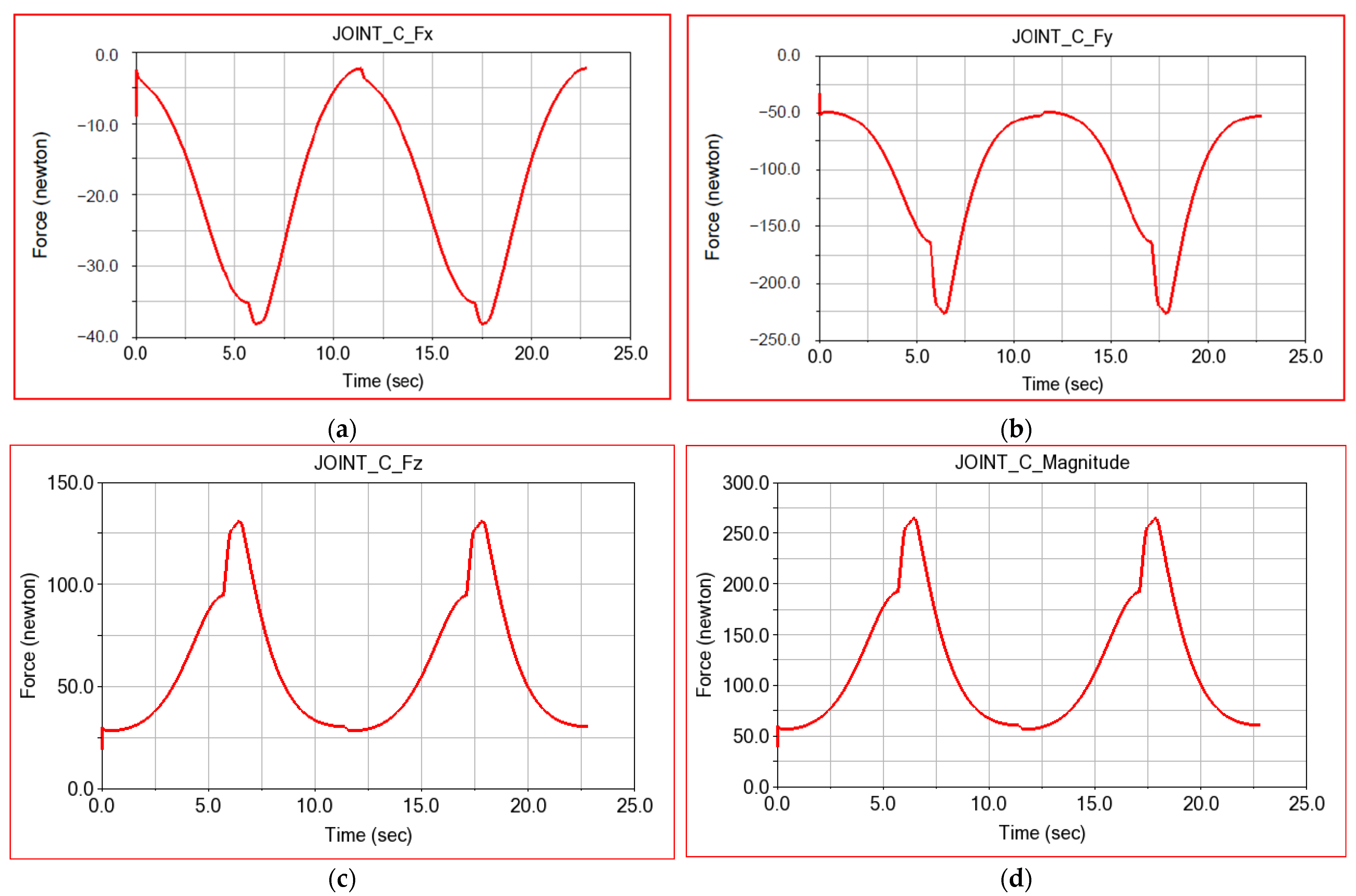
For the situation when the ParReEx robot is used by a patient considering the frictional forces in the kinematic joints and the flexibility of the elements, the following results are obtained for connecting forces in Joint C, as shown in Figure 26.
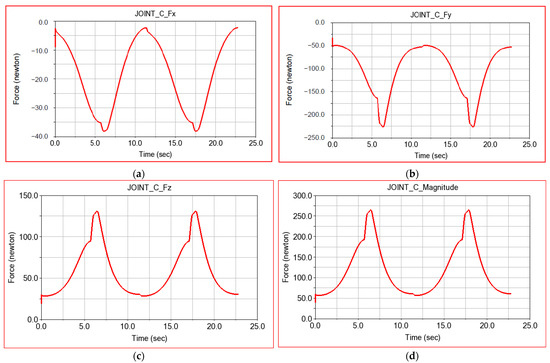
Figure 26.
Connecting forces in rotational Joint C in Case 3: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 22 shows the numerical results obtained for the components of the forces and the resulting reaction in joint C for simulation case 3.
Table 22.
Joint C connection force components.
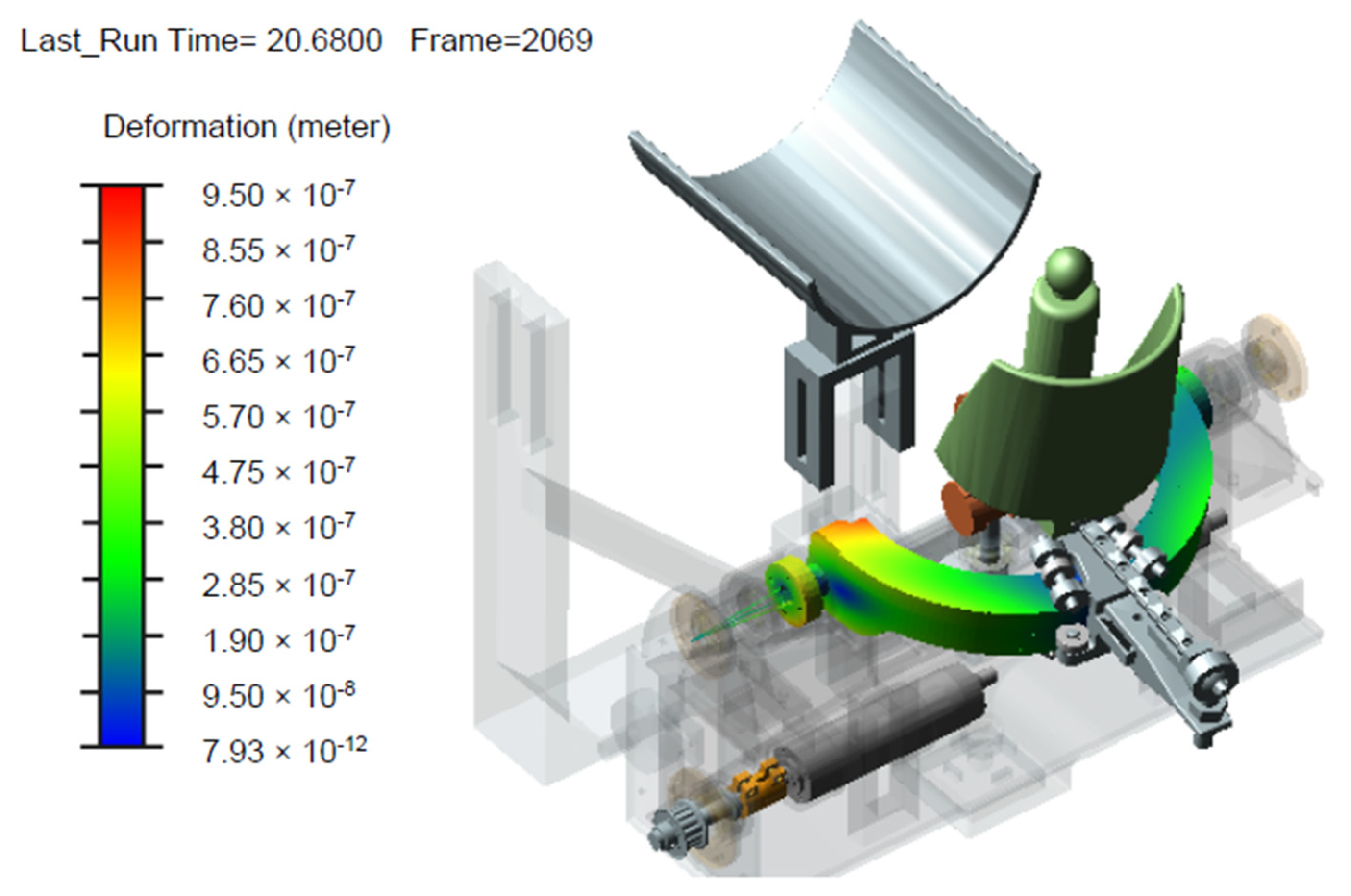
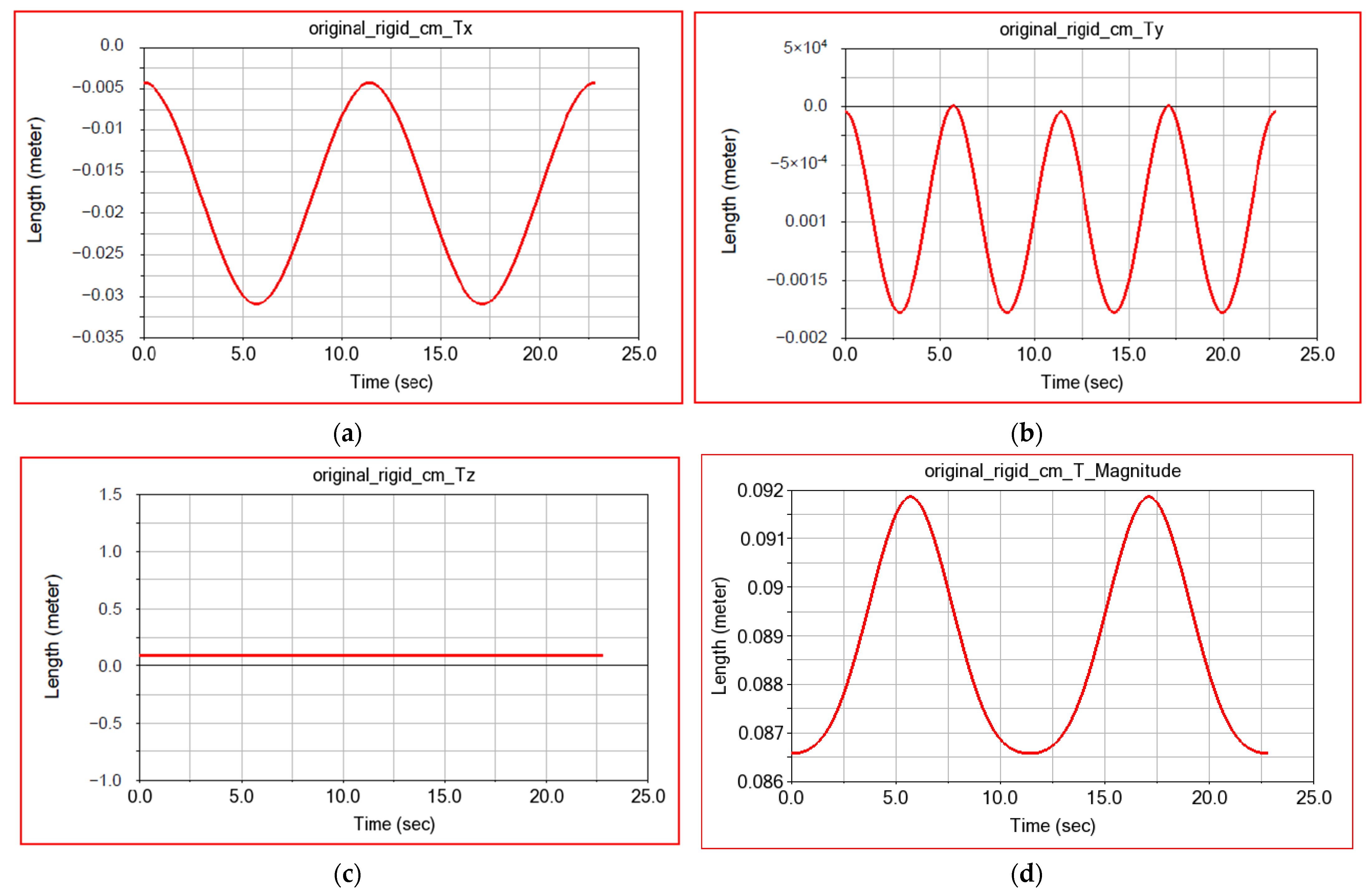
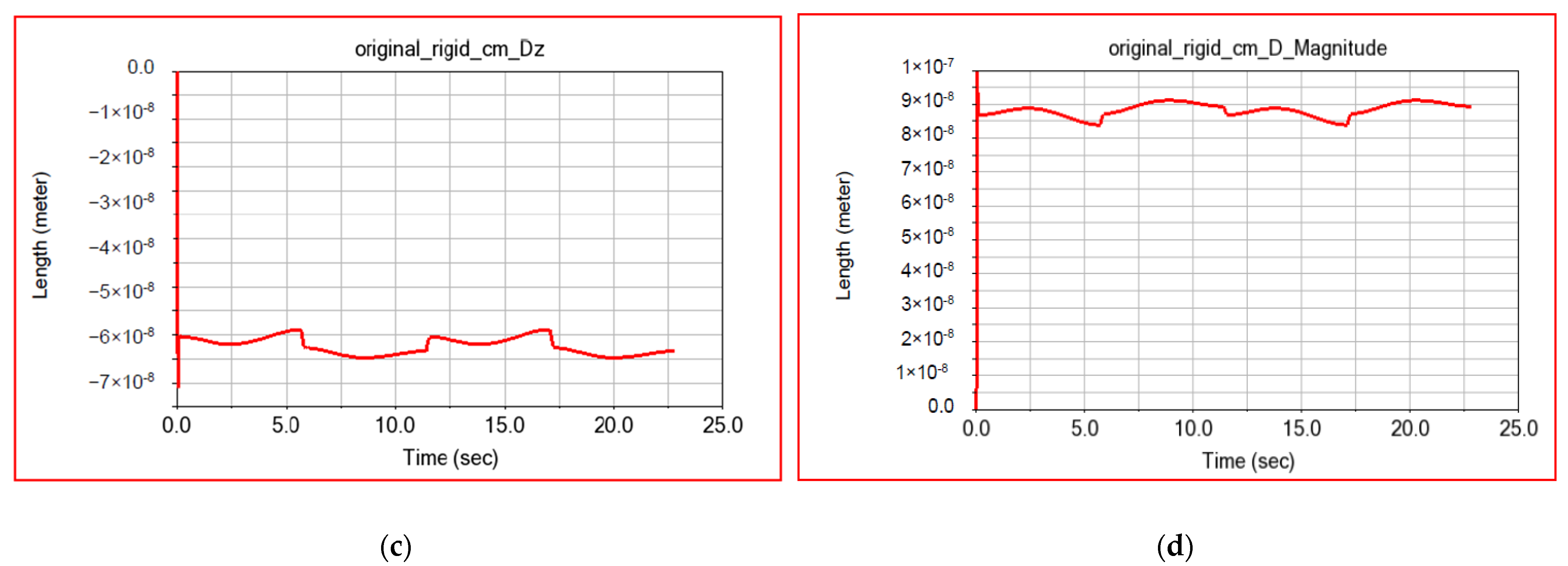
As previously specified, in this simulation case, we are interested in the translational displacements associated with the marker attached to the center of mass of the circular guide relative to its undeformed location. In addition to the displacements, we are also interested in the specific deformations of this marker. These results are shown in Figure 27 and Figure 28.
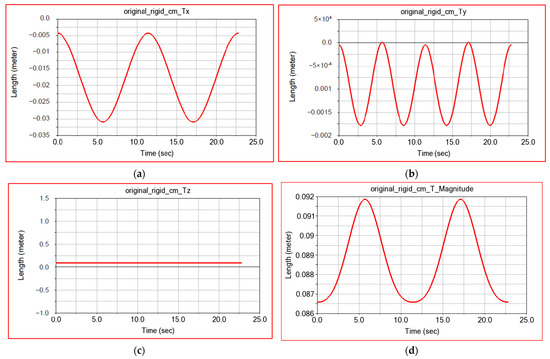
Figure 27.
Displacement of the center of mass of the circular guide: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
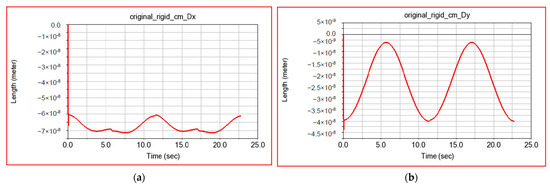
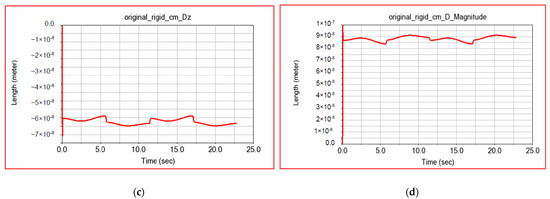
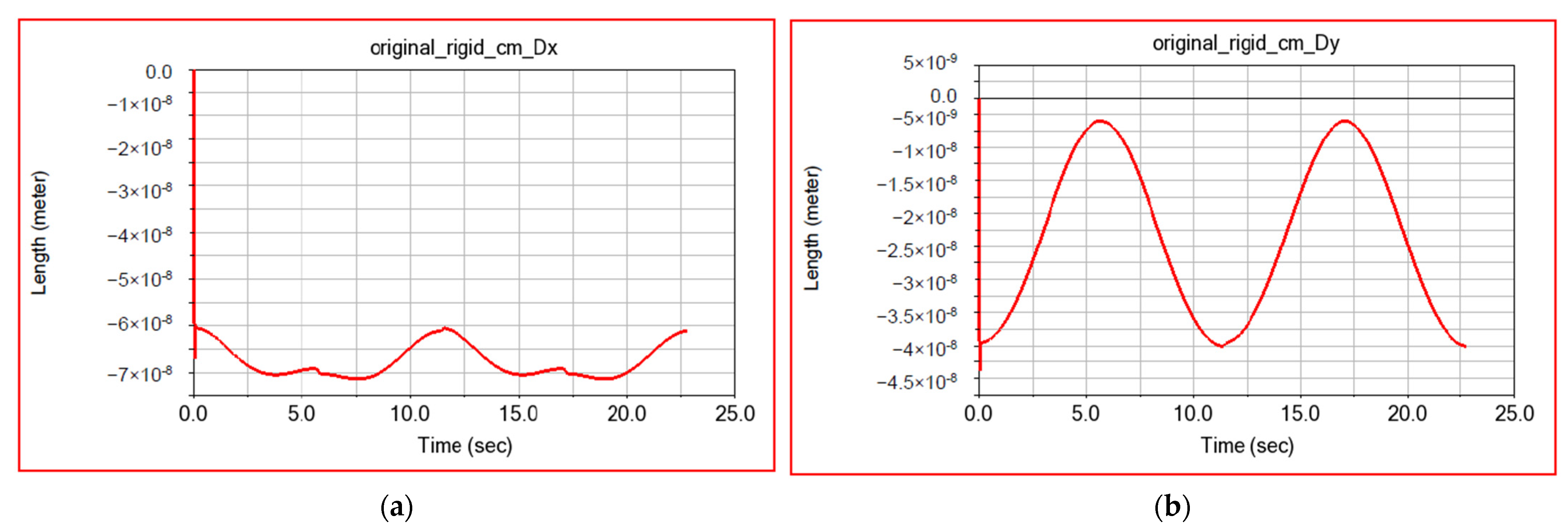
Figure 28.
Deformation of the center of mass of the circular guide: (a) in the x-direction; (b) in the y-direction; (c) in the z-direction; and (d) the resultant.
Table 23 shows the numerical results obtained for the components and the resulting displacement of the marker attached to the center of mass of the circular guide.
Table 23.
Displacement of the center of mass of the circular guide.
Table 24 shows the numerical results obtained for the components and the resulting deformations of the marker attached to the center of mass of the circular guide.
Table 24.
Deformation of the center of mass of the circular guide.
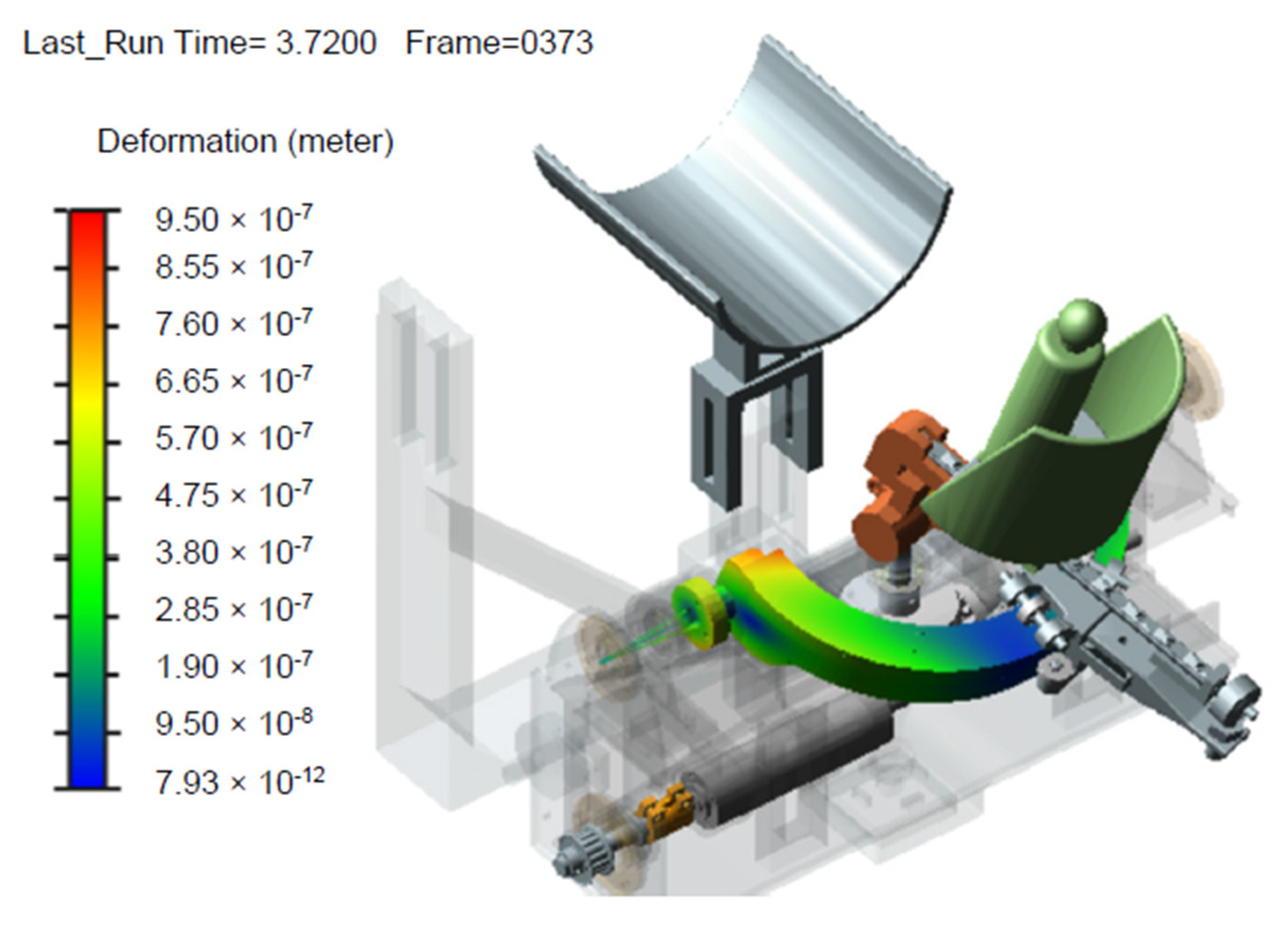
A map of the specific strain distribution of the robot’s circular guide is shown in Figure 29. These deformations have very small values, so this guide is designed with sufficient stiffness. Its mass can be reduced by structural stiffening, which will be discussed in the next paragraph.
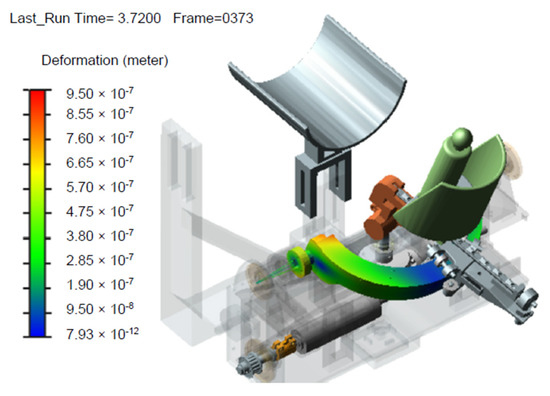
Figure 29.
Deformation map of the robot circular guide.
4. Structural Optimization of the Circular Guide of the ParReEx Robot
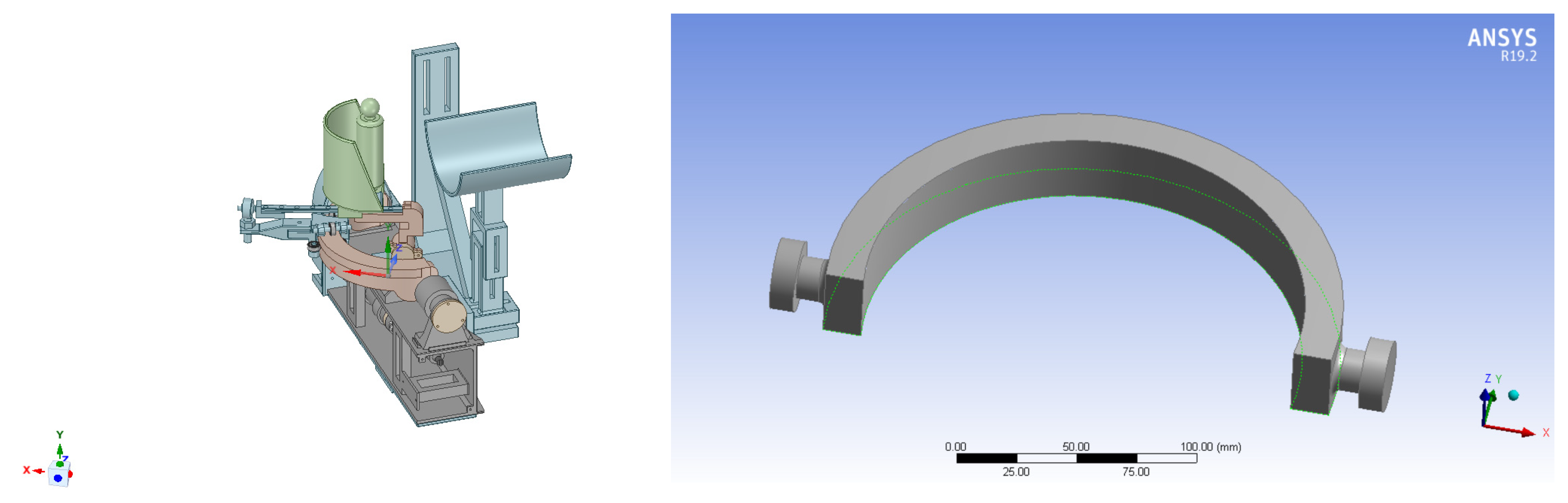
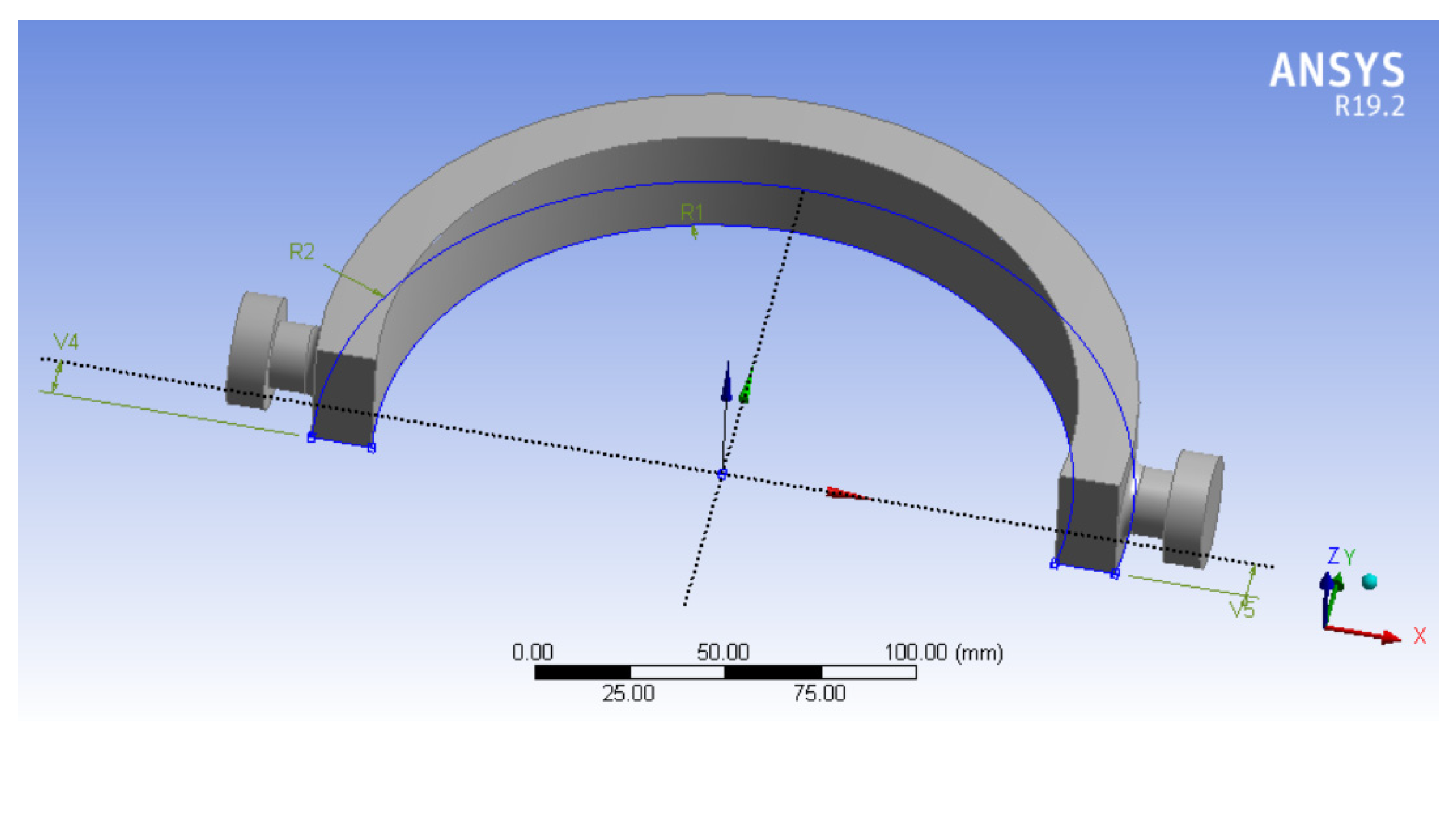
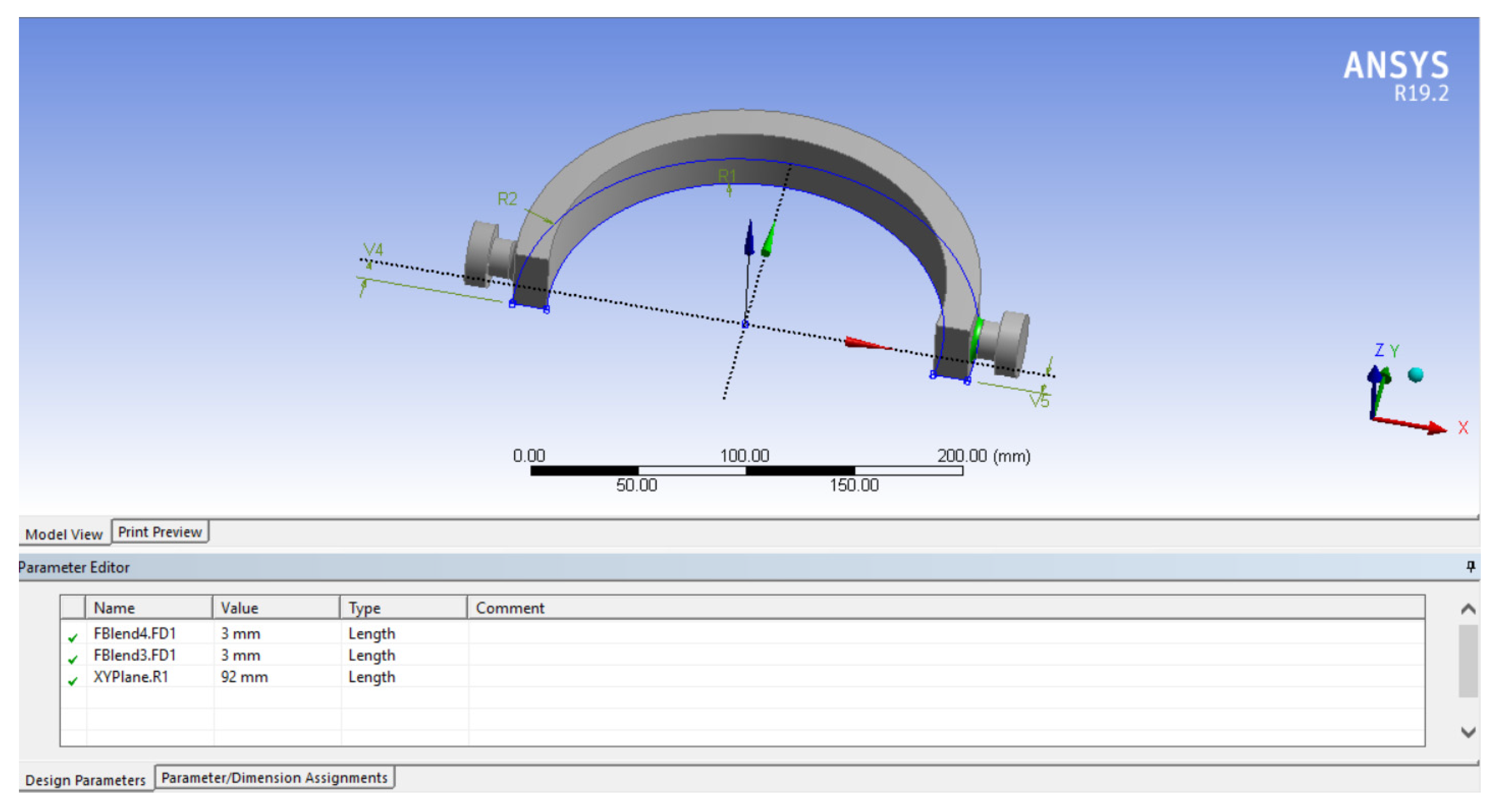
The circular guide in the structure of the ParReEx robot is an important part that must maintain a certain torsional and bending rigidity and a corresponding resistance to fatigue. To achieve structural optimization of the circular guide, we start from its existing geometry, which we model parametrically with the help of the ANSYS Workbench-Design Modeler preprocessor, as shown in Figure 30.
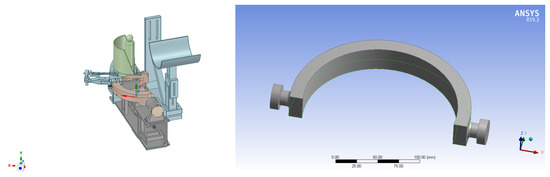
Figure 30.
Parameterized model of the circular guide in ANSYS Design Modeler.
Structural optimization involves two objectives:
- Reducing the mass of the circular guide, which is made of aluminum alloy, by respecting the constraint of a maximum equivalent stress;
- Increased fatigue resistance by reducing peak tensions in areas with stress concentrators. These areas are the two spindles through which the guide is supported in the bearing housings.
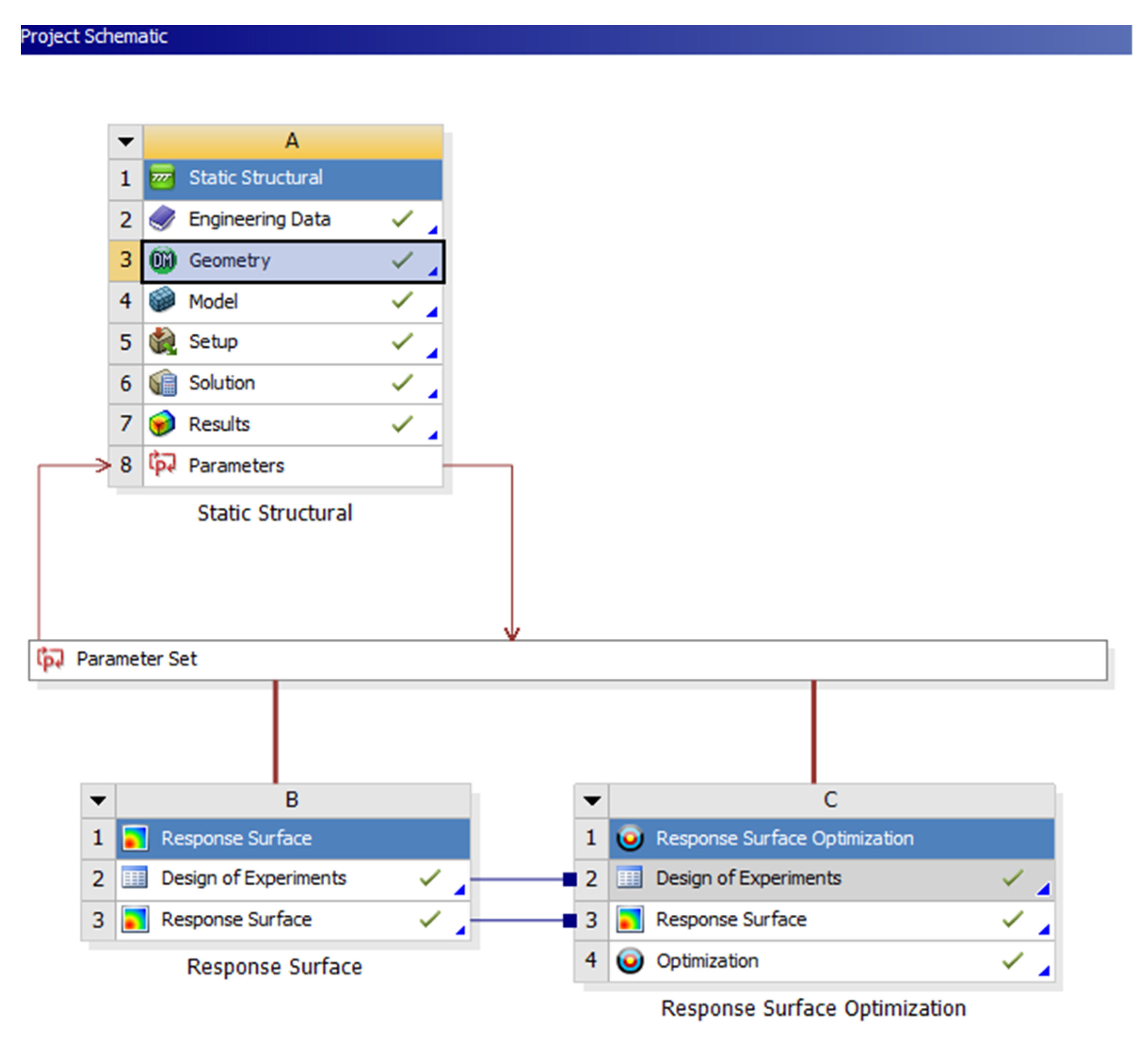
The optimization block diagram is shown in Figure 31.
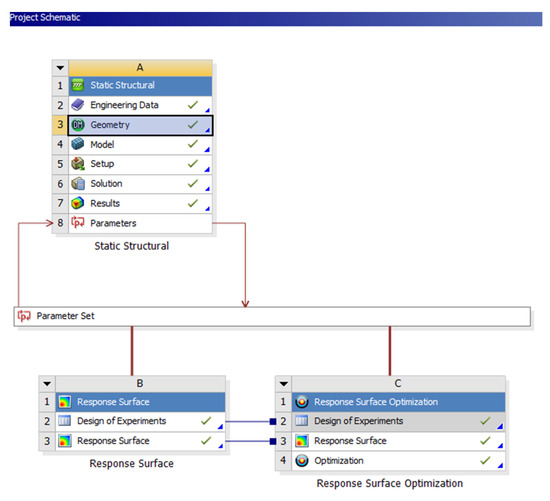
Figure 31.
Block diagram of the structural optimization process of the guide.
The steps of the structural optimization process of the circular guide in accordance with the block diagram in Figure 31 are described in the following.
4.1. Parameterized Geometric Modelling of Circular Guidance Using the Design Modeler Preprocessor
Three geometrical parameters of the guide are selected as input data, namely: the radii of the two spindles connecting the circular guide, and the inner radius of the guide, named R1, as shown in Figure 32. At this stage, the physically possible ranges of variation of the geometrical parameters included in the optimization process are checked and determined. Thus, the range of variation of the two radii is between 2.7 and 3.3 mm. For the inner radius of the circular guide, the variation limits are from 82.8 to 101.2 mm.
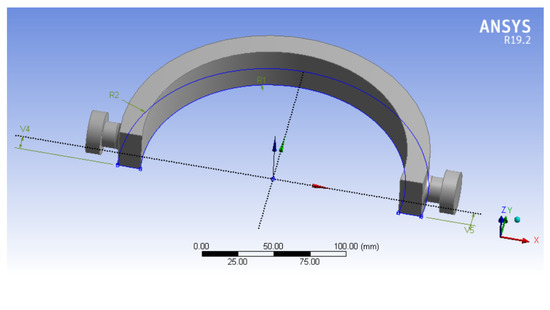
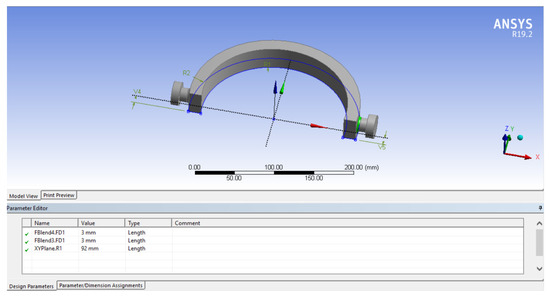
Figure 32.
Parameters selected as input in the optimization process.
The output parameters are the guide mass as well as the von Mises equivalent stress. The initial guide mass is calculated based on the definition of the guide material and has a value of 0.54397 kg. The von Mises equivalent stress is calculated after running structural static analysis.
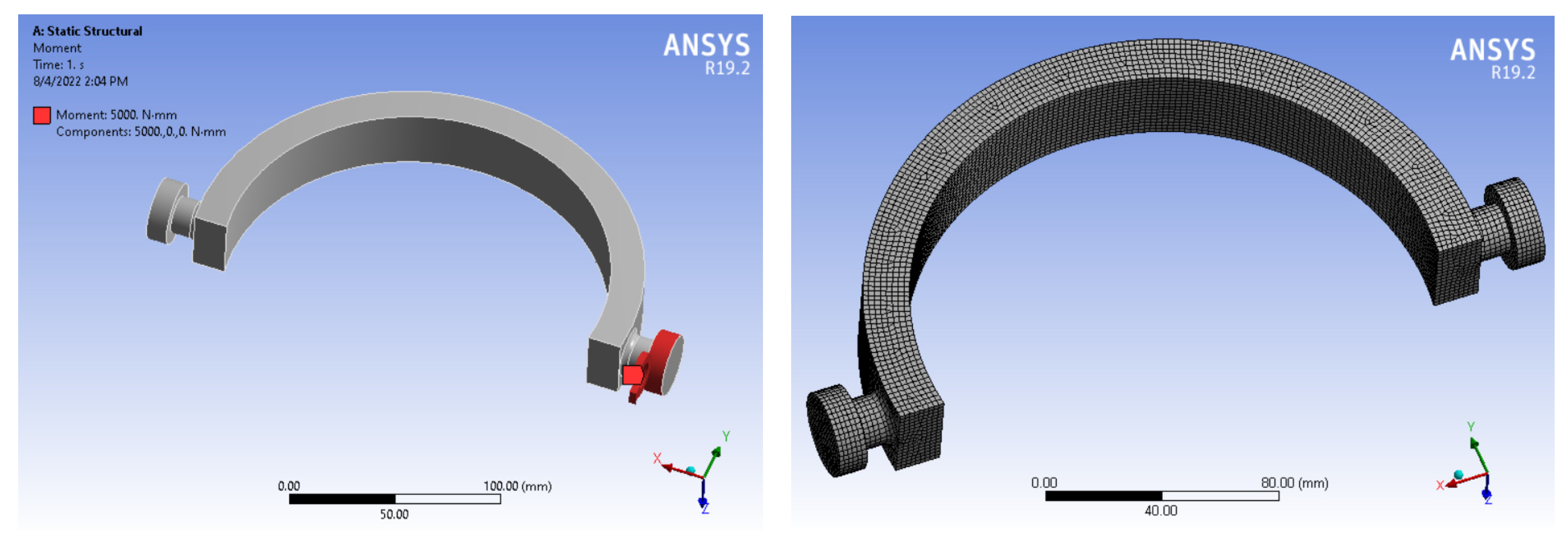
The worst-case loading condition of the circular guide is when the element that rests on the guide is in the extreme position, in which case the guide is subject to a compound stress of both twisting and bending. For finite element analysis, we specified the boundary conditions and loads according to the real model. Thus, we defined rotation Joints A and B between the circular guide and the casing. A torque of 5000 N mm acts on the drive end of the guide, while a fixed support is defined on the opposite end. For discretization of the guide into finite elements, we used hexahedral elements and specified a finite element size of 2 mm. The discretized structure comprises 130,489 elements and 316,68 nodes.
Figure 33 shows two important aspects for the construction of the finite element model, namely the definition of the torsional moment and the finite element discretization of the circular guide.
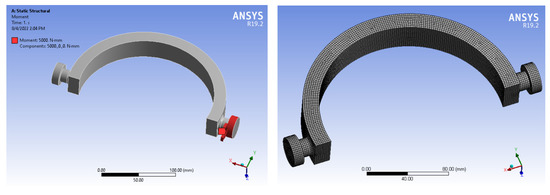
Figure 33.
Definition of boundary conditions and discretization into finite elements.
4.2. Running Transient Structural Analysis
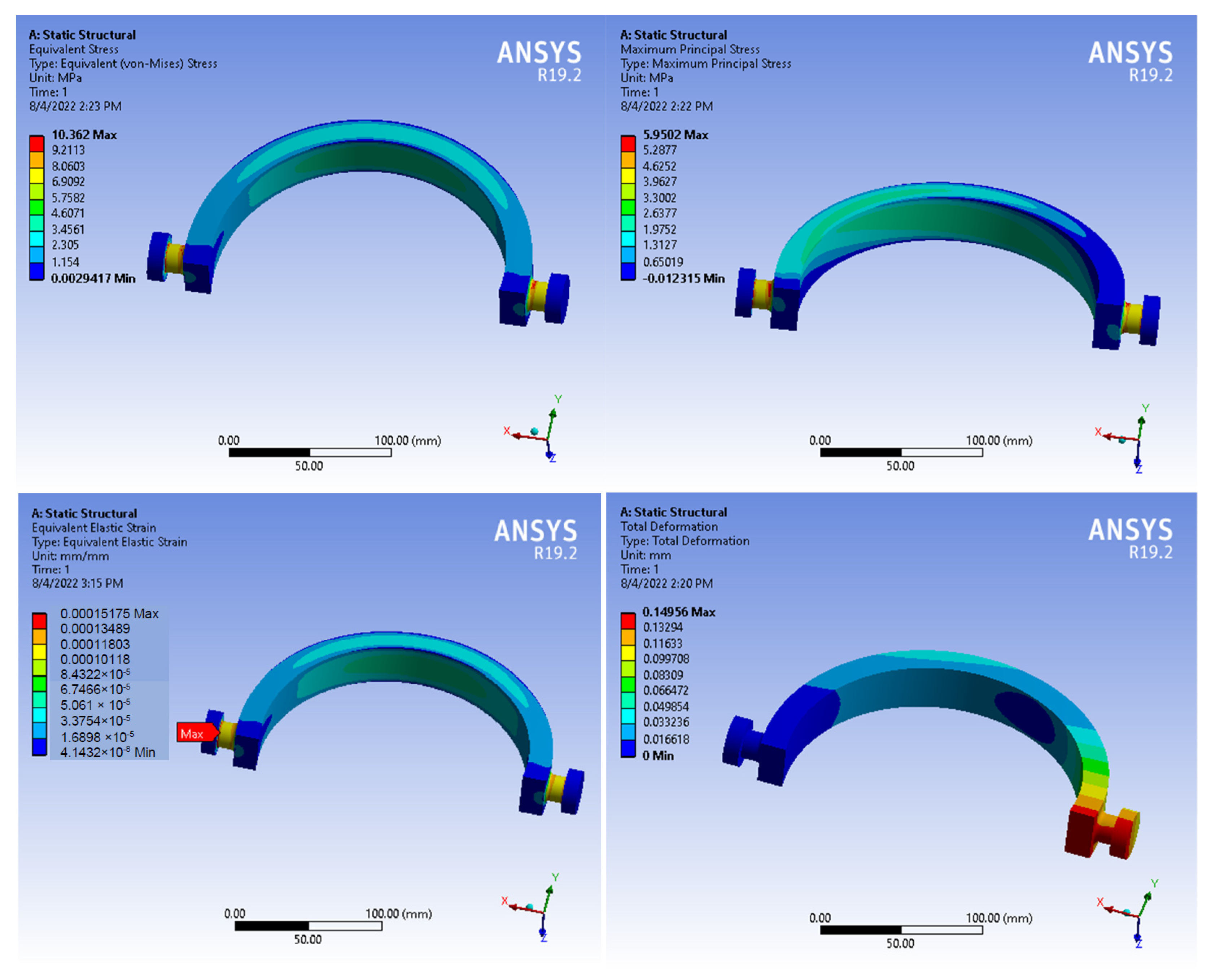
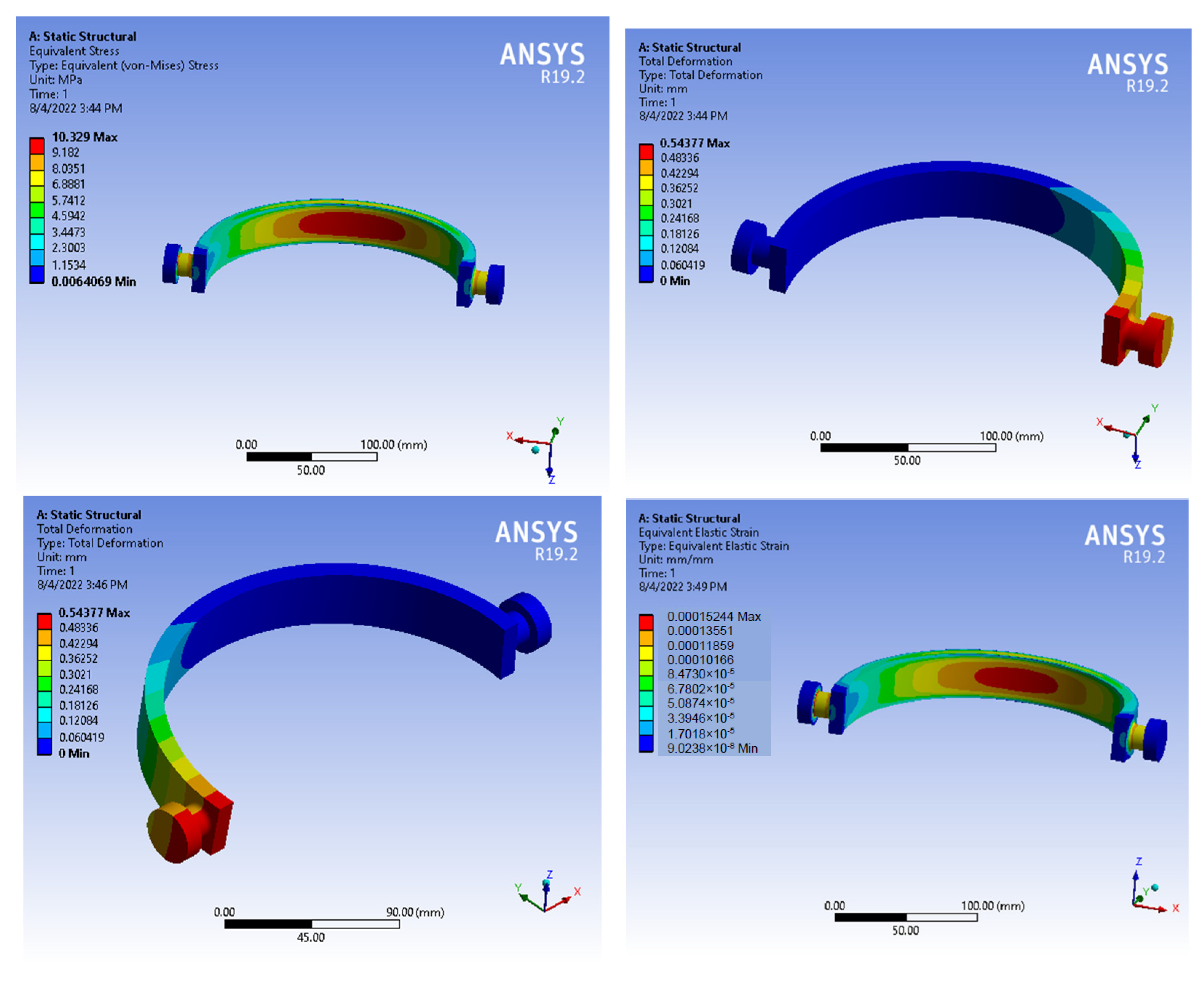
Thus, Figure 34 shows the distribution of the equivalent von Mises stresses, the maximum principal stresses, the distribution of the equivalent specific strains, and the total displacements.
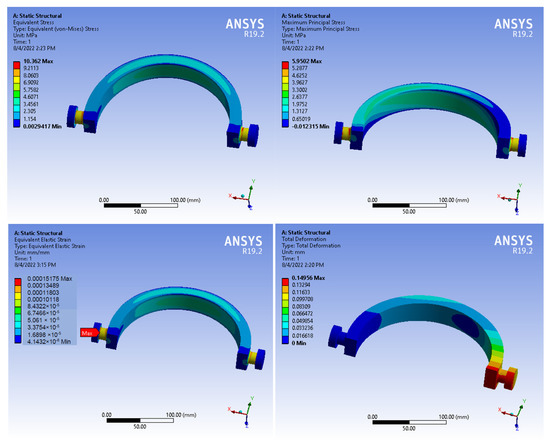
Figure 34.
Results of mechanical stresses, displacements, and strains for non-optimized structure.
At this stage, the maximum von Mises equivalent stress of 10.362 MPa is defined as the output parameter.
4.3. Conduct a Design-of-Experiments Study
Based on a design-of-experiments (DE) study, central composite design, several possible design variants are calculated, as shown in Table 25. There are 15 possible design solutions of the considered structure. For each design point of the structure, we present on the line related to the respective DP the values of the input parameters (P1, P2-radii of the connection (Blend), and P3-radius R1) and the output parameters (P4-Solid Mass and P5-Equivalent Stress Maximum). From these results, the following is found:
Table 25.
Design points of design-of-experiments.
- -
- For the output parameter P4-Solid Mass, the minimum calculated value is 0.27269 kg, and the maximum is 0.79132 kg;
- -
- For the output parameter P5-Equivalent Stress, the minimum calculated value is 10.125 MPa, and the maximum is 19.837 MPa.
5. Obtaining a Response Surface
A response surface is a 2D or 3D graph showing the variation of output parameters relative to an input parameter. Table 26 shows the results of a Min–Max Search analysis. The table shows the minimum (lines 3 and 4) and maximum (lines 6 and 7) values of the output parameters P4 and P5. Obviously, increasing the input parameter P1 causes a decrease in output parameter P4 (Mass) and an increase in parameter P5 (Equivalent Stress).
Table 26.
Min–Max Search.
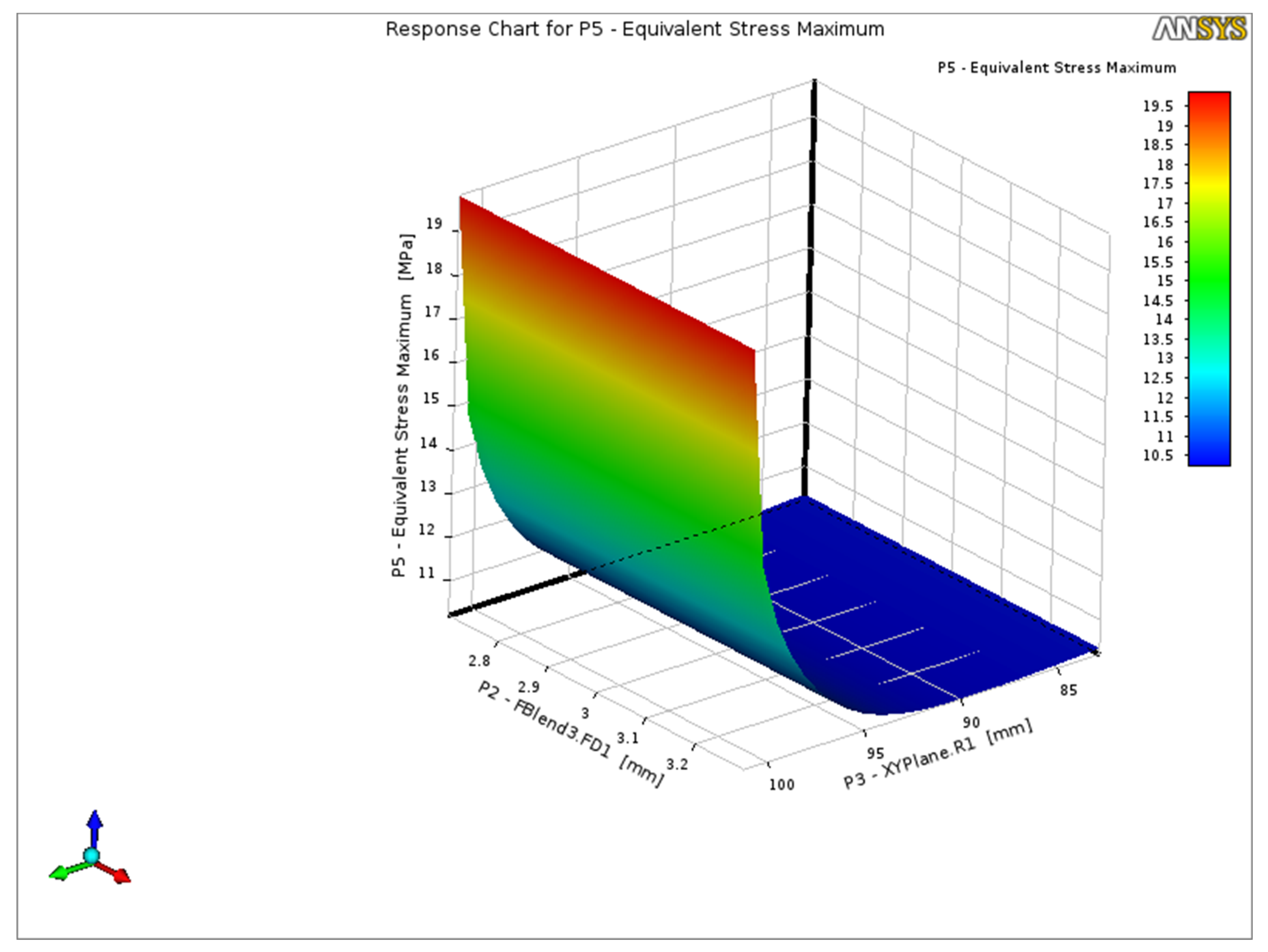
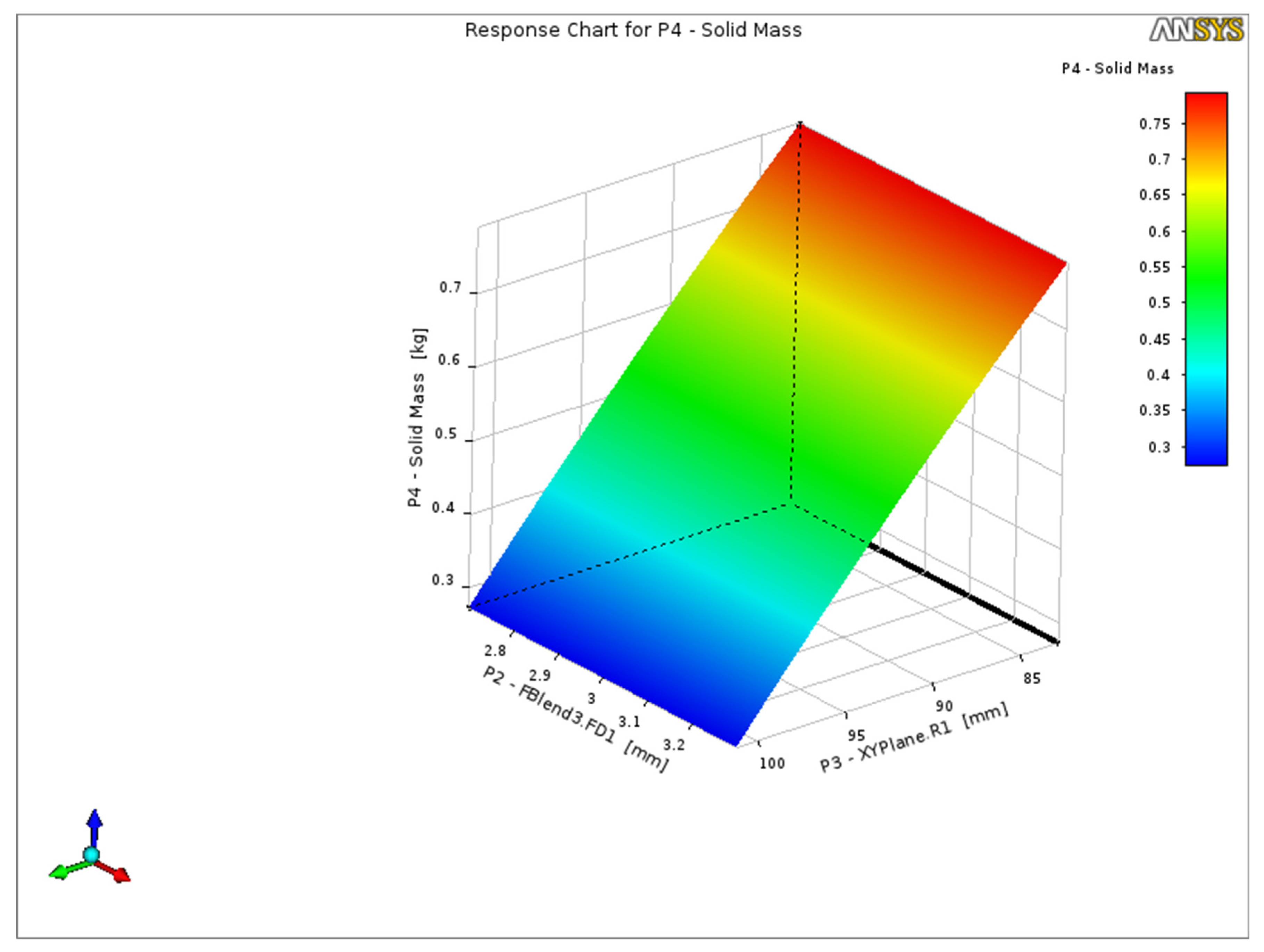
The response surfaces obtained are shown in Figure 35 and Figure 36. Calculation of response surfaces is necessary because the next step is to optimize these surfaces in order to obtain an optimal solution.
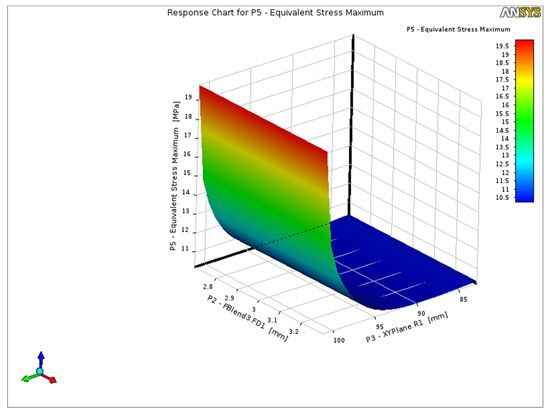
Figure 35.
Response chart for P6—Equivalent Stress Maximum vs. P1 and P3.
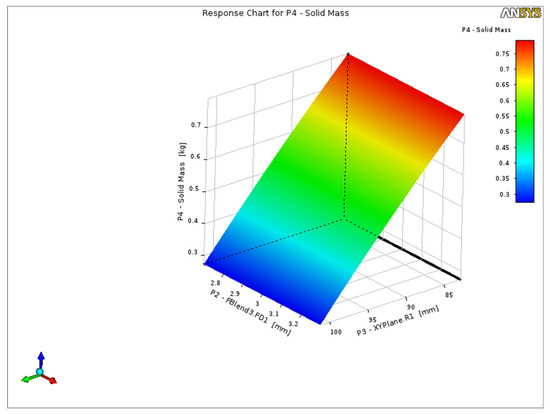
Figure 36.
Response chart for P4—Solid Mass vs. P1 and P3.
The computed response surface design parameters (Solid Mass and Equivalent Stress Maximum) characteristics are shown in the Table 27.
Table 27.
Response surface parameters.
Response Surface Optimization
Optimization involves minimizing the output parameter P5, maximum equivalent von Mises stress, and minimizing parameter P4, mass. The defined optimization constraint assumes that the equivalent von Mises stress does not exceed 14 MPa.
Table 28 shows the purpose of the optimization, i.e., the minimization of the input parameters P4 and P5, specifies the optimization method used, and details the 3 points of the optimization surface that are candidates for the optimal solution.
Table 28.
Optimization study.
Table 29 shows the results obtained for the three design solutions (candidate points). Candidate Point 2 is identified as the optimal solution, for which the values of the input parameters are: P1 = 3.0327 mm, P2 = 3.2963 mm, and P3 = 98.151 mm, and the values obtained for the output parameters are: P4 = 0.36531 mm and P5 = 11.919 MPa.
Table 29.
Optimization candidate points.
The goal of structural optimization is to achieve more-uniform distribution of stresses and strains to eliminate stress concentrators, to increase fatigue strength, and, most importantly, to reduce the mass of the guide.
As shown in Figure 37 this objective has been achieved. Symmetrical stress distribution is observed, and the optimization constraint of keeping the maximum stresses below the imposed limit is fulfilled.
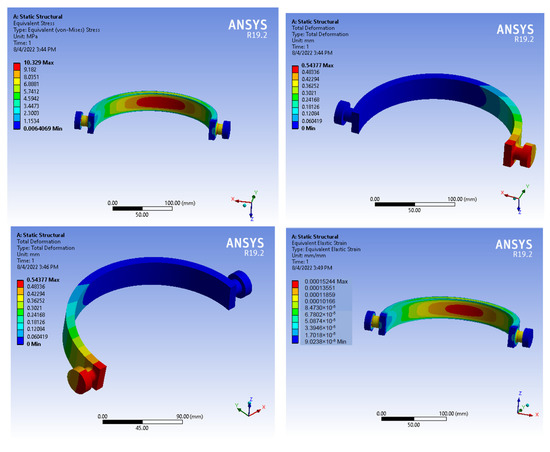
Figure 37.
Results of mechanical stresses, displacements, and deformations for the optimized structure.
6. Experimental Determination of the Robot Module Actuation Torques
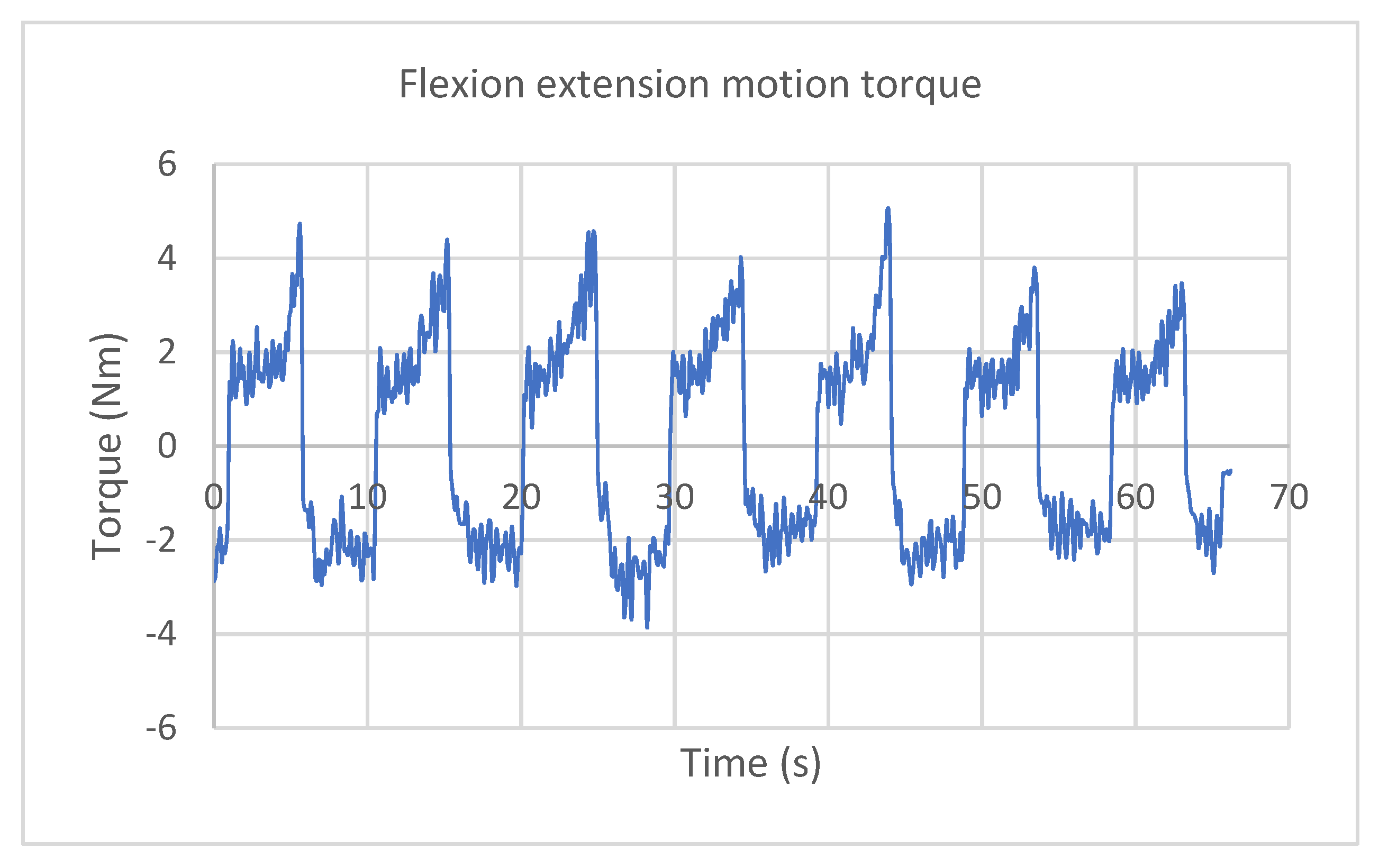
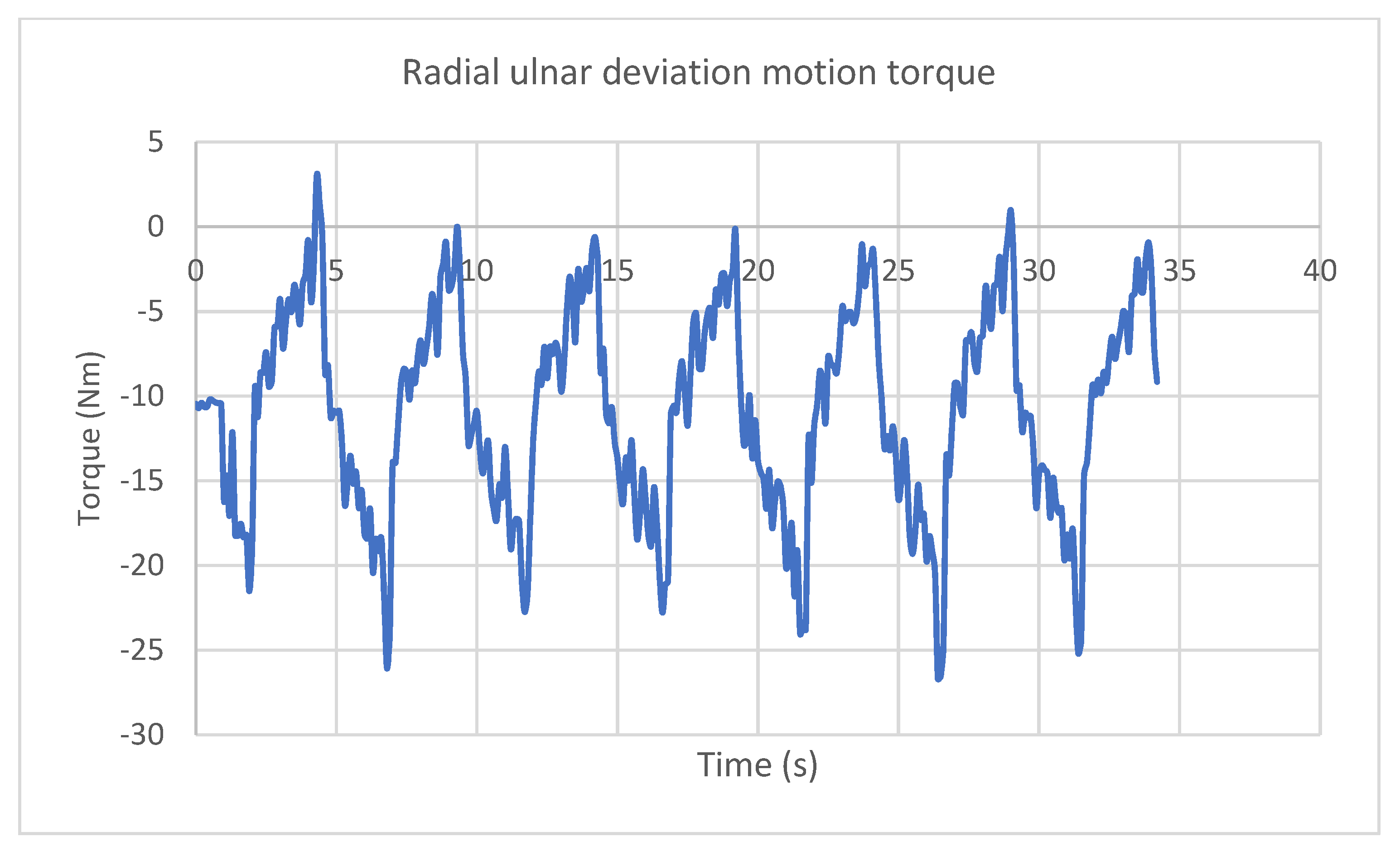
The robotic system is tested in laboratory conditions using a healthy subject (with informed consent). The tested subject is 1.85 m height and weighs 88 kg, which leads to hand weight (according to [51]) similar to the simulation loads presented in Figure 21. The results are shown in Figure 38, which presents the time history diagram of the torque required for the flexion–extension motion for seven cycles with the following motion parameters: motion amplitude (range of motion) of 60° (both for flexion and extension) and speed of 30°/s. The torque is estimated using the MC_ReadActualTorque (FB) function in Automation Studio, B & R Automation [47], which provides an approximate value of the required motor torque. The maximum required value of the torque is 4.5 Nm, while the average is 0.0821 Nm. Figure 39 presents the time history diagram of the radial–ulnar deviation motion for seven cycles using the following motion parameters: radial motion amplitude of 20°, ulnar motion amplitude of 30° and speed of 30°/s. The maximum required torque value is −26 Nm, while the average is −10.887 Nm.
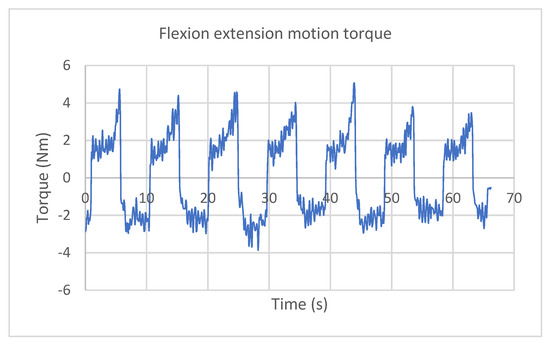
Figure 38.
The time history diagram for the flexion–extension motion of the ParReEx-wrist robotic system.
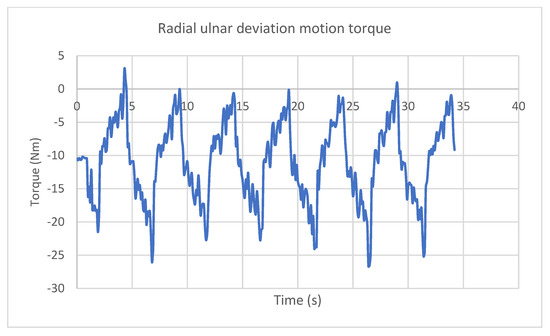
Figure 39.
The time history diagram for the radial–ulnar deviation motion of the ParReEx-wrist robotic system.
7. Discussion
Simulations of ParReEx robot dynamics were performed in three simulation cases: (1) without friction in the couplings, (2) with friction, and (3) with friction and flexible elements.
The evolution of the RMS value of the resulting connecting forces in Couplings A and B for the three simulation scenarios is shown in Figure 40. The RMS value of a set of values (or a continuous-time waveform) is the square root of the arithmetic mean of the squares of the values, or the square of the function that defines the continuous waveform.
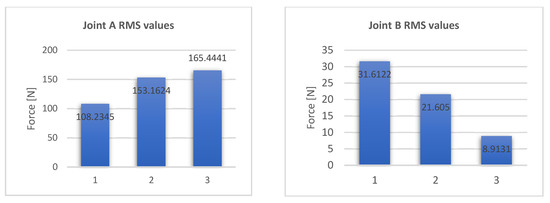
Figure 40.
Evolution of the RMS values for the connection forces in Couplings A and B.
The presence of friction in the coupling increases the reaction in Coupling A and decreases the reaction in Coupling B. This can be explained by the fact that charging Coupling A unloads Coupling B. The presence of a toothed belt drive in Coupling A causes additional loading of this driving joint. In this case, the bearing in Coupling B will be a driving one, i.e., it will also take up the axial forces that occur in the circular guide element.
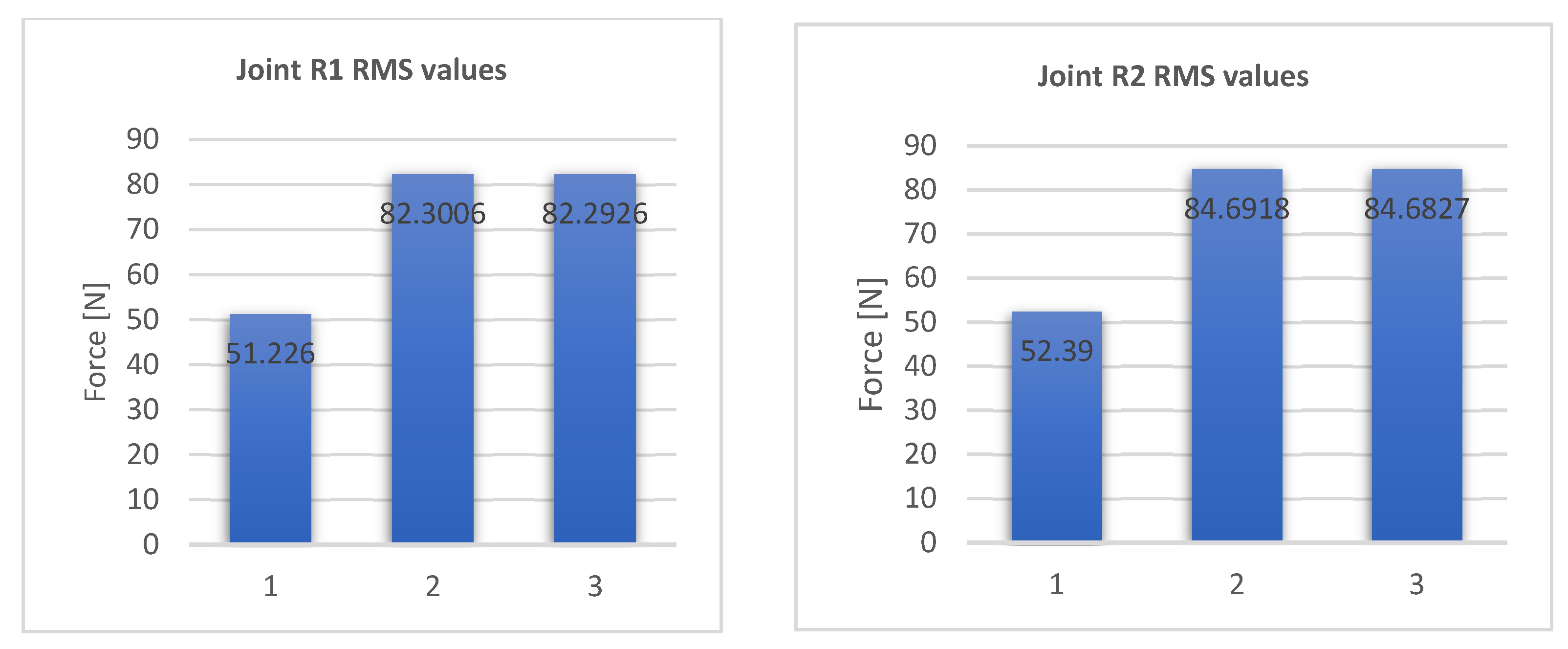
For the other couplings, friction increases the RMS values of the resulting connecting forces. Thus, Figure 41 shows the evolution of the RMS values for the resultant coupling forces in R1 and R2.
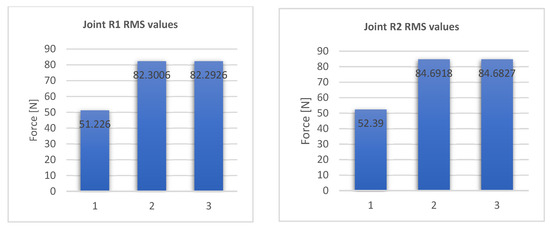
Figure 41.
Evolution of the RMS values for the connection forces in Joints R1 and R2.
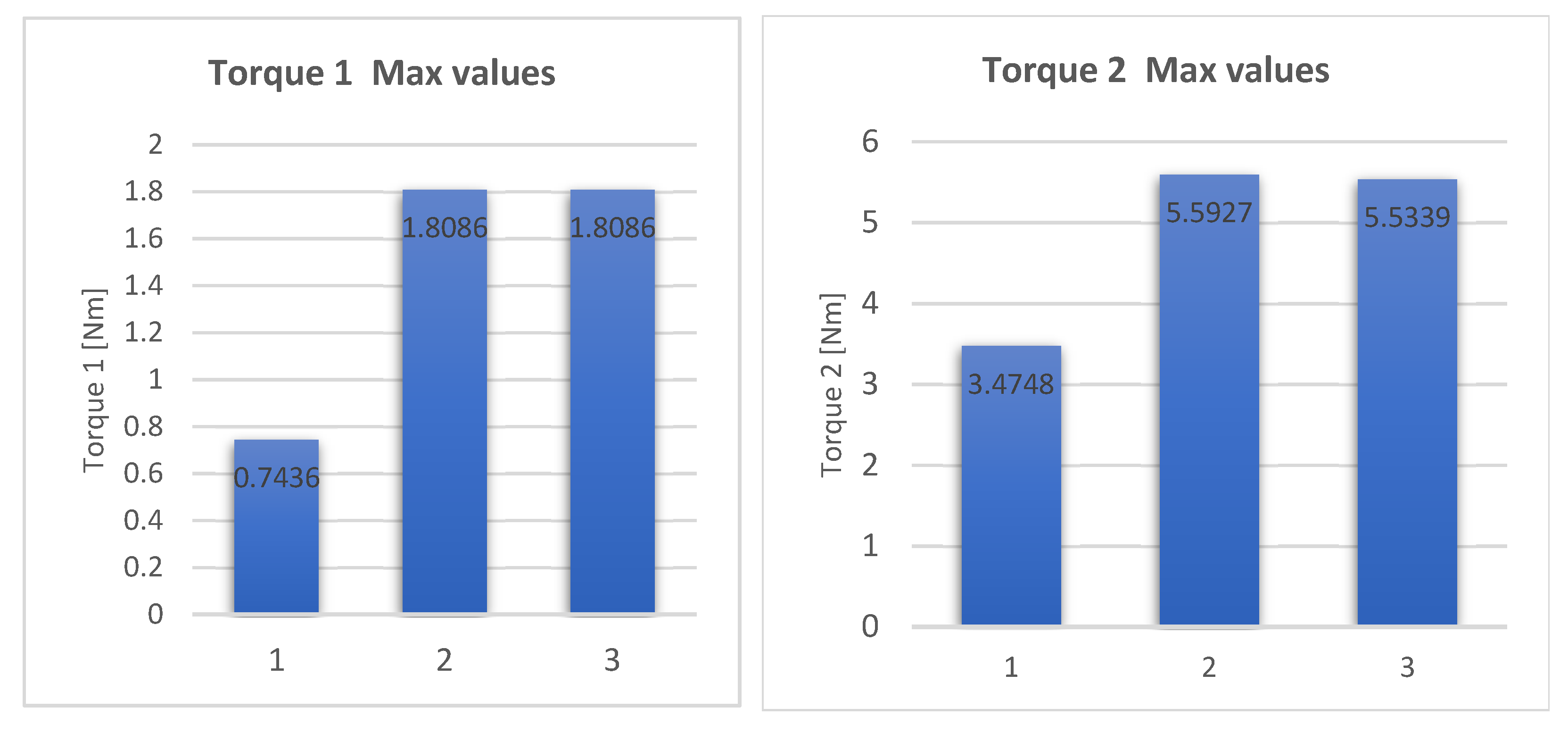
Further, friction increased the actuation moment for flexion–extension (Torque 1) and radial–ulnar deviation (Torque 2), as Figure 42 illustrates.
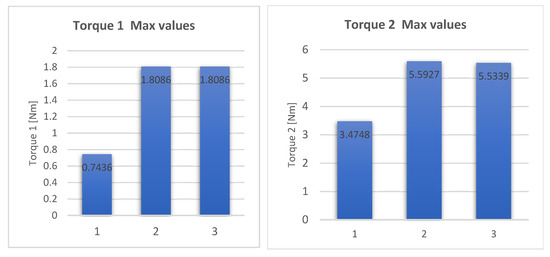
Figure 42.
Evolution of the maximum values for the moments of actuation for flexion–extension and radial–ulnar deviation motions.
Numerical simulation in ADAMS (Figure 21) showed that flexion–extension motion of the wrist joint required a maximum moment of 1.8086 Nm, and radial–ulnar deviation required a maximum moment of 5.5339 Nm. Experimentally, higher values were obtained for these parameters: 4.5 Nm for flexion–extension and 20 Nm for radial–ulnar deviation. As a remark on the experimentally determined values, it is found that these quantities do not start from zero, so in the initial starting position, the system is preloaded by the human subject’s arm. The same happened in the numerical simulation in ADAMS, only in the simulation we considered the load produced by the patient’s arm of 30 N as a constant load.
We also found that the experimentally measured values for the actuation moments have similar variation. The differences between the experimentally measured values and those obtained by numerical simulation can be explained as follows:
- ✓
- In the case of numerical simulation, we defined the motion law by the STEP function, and at the end of the stroke the angular velocity is reduced, which is not the case in the experimental case;
- ✓
- The virtual prototype does not consider the presence of clearance in the kinematic joints. In the case of the experimental prototype, these clearances are inherent, so the components could not be assembled. The presence of these clearances produces jumps of moments at the end of the stroke, which is not the case with the virtual simulation.
8. Conclusions
In this paper, we conducted a study on the dynamics of the ParReEx robot used for the wrist joint. Dynamic analysis was performed using MSC.ADAMS in three simulation scenarios:
- (a)
- Kinematic elements were considered rigid bodies and friction in the kinematic couplings was not considered;
- (b)
- Kinematic elements were considered rigid bodies and friction in the robot couplings was considered;
- (c)
- Both flexibility of kinematic elements and friction in the couplings were considered.
Structural optimization of the circular guide of the ParReEx robot using ANSYS software was performed.
The differences between the experimentally measured values and those obtained by numerical simulation are acceptable for the following reasons:
- -
- Parts made by 3D printing have tolerances within 0.2 mm. For this reason, the experimental model is in real assembly conditions;
- -
- Similar variations of torsional moments were determined experimentally and by numerical simulation in ADAMS, which validates the two models.
Dynamic analysis allows us to draw conclusions about the operational safety of a robotic system. A next step is dynamic optimization of the robotic structure. Structural optimization can eliminate stress concentrators in the robot structure, which contributes to increased operational safety.
The results obtained by numerical simulation were validated by experimental measurements. Thus, the actuation moments for the two movements of the wrist joint—flexion–extension and radial–ulnar deviation—were determined experimentally. Concordance between the variations determined by numerical simulation and those determined experimentally was observed.
Author Contributions
Conceptualization, D.T., I.D.G., D.P. and G.C.; methodology, D.T., I.D.G. and D.P.; software, I.D.G. and D.T.; validation, P.T., B.G., N.T., C.A. and D.N.T.; formal analysis, I.D.G., P.T. and B.G.; investigation, I.D.G., D.T. and D.P.; resources, D.T.; writing—original draft preparation, I.D.G. and D.T.; writing—review and editing, D.P., B.G. and G.C.; visualization, D.N.T., N.T. and C.A.; supervision, D.T., D.P. and G.C.; project administration, D.P. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by a grant from the Romanian Ministry of Research and Innovation, CCCDI—UEFISCDI, project number PN-III-P2-2.1-PED-2019-3022/546PED/2020 (NeuroAssist) within PNCDI III, and by the project POCU/380/6/13/123927—ANTREDOC, “Entrepreneurial competencies and excellence research in doctoral and postdoctoral studies programs”, co-funded from the European Social Fund through the Human Capital Operational Program 2014–2020.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
All subjects gave their informed consent for inclusion before they participated in the study. The study was conducted in accordance with the Declaration of Helsinki, and the protocol was approved by the Ethics Committee of NeuroAssist project.
Data Availability Statement
The data presented in this study are openly available in the reference number.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Klamroth-Marganska, V.; Blanco, J.; Campen, K.; Curt, A.; Dietz, V.; Ettlin, T.; Felder, M.; Fellinghauer, B.; Guidali, M.; Kollmar, A.; et al. Three-dimensional, task-specific robot therapy of the arm after stroke: A multicentre, parallel-group randomised trial. Lancet Neurol. 2014, 13, 159–166. [Google Scholar] [CrossRef]
- Lindsay, M.P.; Norrving, B.; Sacco, R.L.; Brainin, M.; Hacke, W.; Martins, S.; Pandian, J.; Feigin, V. World stroke organization (WSO): Global stroke fact sheet 2019. Int. J. Stroke 2019, 14, 806–817. [Google Scholar] [CrossRef] [PubMed]
- Feigin, V.L.; Norrving, B.; Mensah, G.A. Global Burden of Stroke. Circ. Res. 2017, 120, 439–448. [Google Scholar] [CrossRef] [PubMed]
- Virani, S.S.; Alonso, A.; Benjamin, E.J.; Bittencourt, M.S.; Callway, C.W.; Carson, A.P.; Chamberlain, A.M.; Chang, A.R.; Cheng, S.; Delling, F.N.; et al. Heart disease and stroke statistics-2020 update: A report from the Americanheart association. Circulation 2020, 141, e1–e458. [Google Scholar] [CrossRef] [PubMed]
- Skilbeck, C.E.; Wade, D.T.; Hewer, R.L.; Wood, V.A. Recovery after stroke. J. Neurol. Neurosurg. Psychiatry 1982, 46, 5–8. [Google Scholar] [CrossRef] [Green Version]
- Kwakkel, G.; Kollen, B.J.; Van der Grond, J.; Prevo, A.J. Probability of regaining dexterity in the flaccid upper limb: Impact of severity of paresis and the time since onset in acute stroke. Stroke 2003, 34, 2181–2186. [Google Scholar] [CrossRef] [Green Version]
- Sivan, M.; Gallagher, J.; Makower, S.; Keeling, D.; Bhakta, B.; O’Connor, R.J.; Levesley, M. Home-based computer assisted arm rehabilitation robotic device for upper limb exercise after stroke: Result of feasibility study in home setting. J. Neuroeng. Rehabil. 2014, 11, 163. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, P.B. The global burden of stroke: Persistent and disabling. Lancet Neurol. 2019, 18, 417–418. [Google Scholar] [CrossRef] [Green Version]
- Murie-Fernandez, M.; Irimia, P.; Martinez-Vila, E.; Meyer, M.J.; Teasell, R. Neuro-rehabilitation after stroke. Neurol. 2010, 25, 189–196. [Google Scholar] [CrossRef]
- Van Peppen, R.P.; Kwakkel, G.; Wood-Dauphinee, S.; Hendriks, H.J.; Van der Wees, P.J.; Dekker, J. The impact of physical therapy on functional outcomes after stroke: What’s the evidence? Clin. Rehabil. 2004, 18, 833. [Google Scholar] [CrossRef]
- Jarrassé, N.; Proietti, T.; Crocher, V.; Robertson, J.; Sahbani, A.; Morel, G.; Roby-Brami, A. Robotic exoskeletons: A perspective for the rehabilitation of arm coordination in stroke patients. Front. Hum. Neurosci. 2014, 8, 1845–1846. [Google Scholar] [CrossRef] [PubMed]
- Yamamoto, I.; Inagawa, N.; Matsui, M.; Hachisuka, K.; Wada, F.; Hachisuka, A. Research and development of compact wrist rehabilitation robot system. Bio-Med. Mater. Eng. 2014, 24, 123–128. [Google Scholar] [CrossRef] [PubMed]
- Loureiro, R.C.V.; Harwin, W.; Nagai, K.; Johnson, M. Advances in upper limb stroke rehabilitation: A technology push. Med. Biol. Eng. Comput. 2011, 49, 1103–1118. [Google Scholar] [CrossRef] [PubMed]
- Volpe, B.T.; Huerta, P.T.; Zipse, J.L.; Rykman, A.; Edwards, D.; DiPietro, L.; Hogan, N.; Krebs, H.I. Robotic Devices as Therapeutic and Diagnostic Tools for Stroke Recovery. Arch. Neurol. 2009, 66, 1086–1090. [Google Scholar] [CrossRef] [Green Version]
- Reinkensmeyer, D.J. Robotic Assistance for Upper Extremity Training after Stroke. In Advanced Technologies in Rehabilitation; Gaggioli, A., Keshner, E.A., Weiss, P.L., Riva, E., Eds.; IOS Press: Amsterdam, The Netherlands, 2009; pp. 25–39. [Google Scholar]
- Huang, J.; Tu, X.; He, J. Design and evaluation of RUPERT wearable upper extremity exoskeleton robot for clinical and in home therapies. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 926–935. [Google Scholar] [CrossRef]
- Vaida, C.; Plitea, N.; Carbone, G.; Birlescu, I.; Ulinici, I.; Pisla, A.; Pisla, D. Innovative development of a spherical parallel robot for upper limb rehabilitation. Int. J. Mech. Robot. Syst. 2018, 4, 256–276. [Google Scholar] [CrossRef]
- Pisla, D.; Tarnita, D.; Tucan, P.; Tohanean, N.; Vaida, C.; Geonea, I.D.; Bogdan, G.; Abrudan, C.; Carbone, G.; Plitea, N. A Parallel Robot with Torque Monitoring for Brachial Monoparesis Rehabilitation Tasks. Appl. Sci. 2021, 11, 9932. [Google Scholar] [CrossRef]
- Geonea, I.D.; Tarnita, D.; Pisla, D.; Carbone, G.; Bolcu, A.; Tucan, P.; Georgescu, M.; Tarniță, D.N. Dynamic Analysis of a Spherical Parallel Robot Used for Brachial Monoparesis Rehabilitation. Appl. Sci. 2021, 11, 11849. [Google Scholar] [CrossRef]
- Tarnita, D.; Marghitu, D. Analysis of a hand arm system. Robot. Comput. Integr. Manuf. 2013, 29, 493–501. [Google Scholar] [CrossRef]
- Gull, M.A.; Bai, S.; Bak, T. A Review on Design of Upper Limb Exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Veerbeek, J.M.; Langbroek-Amersfoort, A.C.; Van Wegen, E.E.; Meskers, C.G.; Kwakkel, G. Effects of robot-assisted therapy for the upper limb after stroke. Neurorehabilit. Neural Repair 2017, 31, 107–121. [Google Scholar] [CrossRef] [PubMed]
- Zengin-Metli, D.; Özbudak-Demir, S.; Eraktaş, İ.; Binay-Safer, V.; Ekiz, T. Effects of robot assistive upper extremity rehabilitation on motor and cognitive recovery, the quality of life, and activities of daily living in stroke patients. J. Back Musculoskelet. Rehabil. 2018, 31, 1059–1064. [Google Scholar] [CrossRef] [PubMed]
- Kim, G.; Lim, S.; Kim, H.; Lee, B.; Seo, S.; Cho, K.; Lee, W. Is robot-assisted therapy effective in upper extremity recovery in early stage stroke?—A systematic literature review. J. Phys. Therapy Sci. 2017, 29, 1108–1112. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shahar, N.; Schwartz, I.; Portnoy, S. Differences in muscle activity and fatigue of the upper limb between Task-Specific training and robot assisted training among individuals post stroke. J. Biomech. 2019, 89, 28–33. [Google Scholar] [CrossRef] [PubMed]
- Bian, H.; Chen, Z.; Wang, H.; Zhao, T. Mechanical design of EFW Exo II: A hybrid exoskeleton for elbow-forearm-wrist rehabilitation. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 689–694. [Google Scholar] [CrossRef]
- Geonea, I.D.; Tarnita, D. Design and evaluation of a new exoskeleton for gait rehabilitation. Mech. Sci. 2017, 8, 307–321. [Google Scholar] [CrossRef]
- Tarnita, D.; Geonea, I.; Petcu, A.; Tarnita, D.N. Numerical simulations and experimental human gait analysis using wearable sensors. In International Workshop on Medical and Service Robots; Springer: Cham, Switzerland, 2016; pp. 289–304. [Google Scholar]
- Berceanu, C.; Tarnita, D.; Filip, D. About an experimental approach used to determine the kinematics of the human movement. J. Solid State Phenom. Robot. Autom. Syst. 2010, 166–167, 45–50. [Google Scholar] [CrossRef]
- Tarnita, D.; Pisla, D.; Geonea, I.; Vaida, C.; Catana, M.; Tarnita, D.N. Static and Dynamic Analysis of Osteoarthritic and Orthotic Human Knee. J. Bionic Eng. 2019, 16, 514–525. [Google Scholar] [CrossRef]
- Tarnita, D.; Catana, M.; Dumitru, N.; Tarnita, D.N. Design and simulation of an orthotic device for patients with osteoarthritis. In New Trends in Medical and Service Robots; Springer: Cham, Switzerland, 2016; pp. 61–77. [Google Scholar]
- Hussain, S.; Jamwal, P.K.; Van Vliet, P.; Ghayesh, M.H. State-of-the-Art Robotic Devices for Wrist Rehabilitation: Design and Control Aspects. IEEE Trans. Hum. Mach. Syst. 2020, 50, 361–372. [Google Scholar] [CrossRef]
- Krebs, H.I.; Volpe, B.T.; Williams, D.; Celestino, J.; Charles, S.K.; Lynch, D.; Hogan, N. Robot-Aided Neurorehabilitation: A robot for wrist rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 327. [Google Scholar] [CrossRef] [Green Version]
- Hogan, N.; Krebs, H.I.; Charnnarong, J.; Srikrishna, P.; Sharon, A. MIT-MANUS: A workstation for manual therapy and training II. In Proceedings IEEE International Workshop on Robot and Human Communication; IEEE: New York, NY, USA, 1992; Volume 1833, pp. 161–165. [Google Scholar]
- Krebs, H.I.; Celestino, J.; Williams, D.; Ferraro, M.; Volpe, B.; Hogan, N. A Wrist extension for MIT-MANUS. Adv. Rehabil. Robot. 2004, 306, 377–390. [Google Scholar]
- Cappello, L.; Elangovan, N.; Contu, S.; Khosravani, S.; Konczak, J.; Masia, L.; Konczak, J. Robot-aided assessment of wrist proprioception. Front. Hum. Neurosci. 2015, 9, 198. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pehlivan, A.U.; Sergi, F.; Erwin, A.; Yozbatiran, N.; Francisco, G.E.; O’Malley, M.K. Design and validation of the RiceWrist-S exoskeleton for robotic rehabilitation after incomplete spinal cord injury. Robotica 2014, 32, 1415–1431. [Google Scholar] [CrossRef] [Green Version]
- Amirabdollahian, F.; Ates, S.; Basteris, A.; Cesario, A.; Buurke, J.; Hermens, H.; Hofs, D.; Johansson, E.; Mountain, G.; Nasr, N.; et al. Design, development and deployment of a hand/wrist exoskeleton for home-based rehabilitation after stroke—SCRIPT project. Robotica 2014, 32, 1331–1346. [Google Scholar] [CrossRef] [Green Version]
- Yin, L.; Huang, L.; Huang, J.; Tian, L.; Li, F. Solution-region-based synthesis approach for selecting optimal four-bar linkages with the Ball–Burmester point. Mech. Sci. 2019, 10, 25–33. [Google Scholar] [CrossRef]
- Saadatzi, M.; Long, D.C.; Celik, O. Comparison of human–robot interaction torque estimation methods in a wrist rehabilitation exoskeleton. J. Intell. Robot. Syst. 2018, 94, 565–581. [Google Scholar] [CrossRef]
- Bae, S.J.; Jang, S.H.; Seo, J.P.; Chang, P.H. The optimal speed for cortical activation of passive wrist movements performed by a rehabilitation robot: A functional NIRS study. Front. Hum. Neurosci. 2017, 11, 194. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Li, J.; Cui, Y.; Dong, M.; Fang, B.; Zhang, P. Design and performance analysis of a parallel wrist rehabilitation robot (PWRR). Robot. Auton. Syst. 2020, 125, 103390. [Google Scholar] [CrossRef]
- Carbone, G.; Gherman, B.; Ulinici, I.; Vaida, C.; Pisla, D. Design issues for an inherently safe robotic rehabilitation device. Mech. Mach. Sci. 2018, 49, 1025–1032. [Google Scholar]
- Bhattacharya, S.; Nenchev, D.N.; Uchiyama, M. A recursive formula for the inverse of the inertia matrix of a parallel manipulator. J. Mech. Mach. Theory 1998, 33, 957–964. [Google Scholar] [CrossRef]
- Codourey, A.; Burdet, E. A body oriented method for finding a linear form of the dynamic equatiojns of fully parallel robot. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; pp. 1612–1619. [Google Scholar]
- Dasgupta, B.; Mruthyunjaya, T.S. Closed-form dynamic equations of the general Stewart platform through the Newton–Euler approach. J. Mech. Mach. Theory 1998, 33, 993–1012. [Google Scholar] [CrossRef]
- Tucan, P.; Gherman, B.; Major, K.; Vaida, C.; Major, Z.; Plitea, N.; Carbone, G.; Pisla, D. Fuzzy Logic-Based Risk Assessment of a Parallel Robot for Elbow and Wrist Rehabilitation. Int. J. Environ. Res. Public Health 2020, 17, 654. [Google Scholar] [CrossRef] [Green Version]
- Tarnita, D.; Geonea, I.; Petcu, A.; Tarnita, D.-N. Experimental Characterization of Human Walking on Stairs Applied to Humanoid Dynamics. Adv. Robot. Des. Intell. Control. 2017, 540, 293–301. [Google Scholar]
- Gherman, B.; Pisla, D.; Plitea, N.; Vaida, C.; Carbone, G.; Pisla, A.; Banica, A. Parallel Robotic System for Upper Limb Medical Recovery. Patent Number OSIM: 132,234, 14 June 2017. [Google Scholar]
- Pennestri, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and Comparison of Dry Friction Force Models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Contini, R.; Drillis, R.J.; Bluestein, M. Determination of Body Segment Parameters. Hum. Factors 1963, 5, 493–504. [Google Scholar] [CrossRef] [PubMed]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).