
Adaptive Neural Network for a Stabilizing Shunt Active Power Filter in Distorted Weak Grids


 ,
,  ,
,
Abstract
:1. Introduction
2. System Configuration
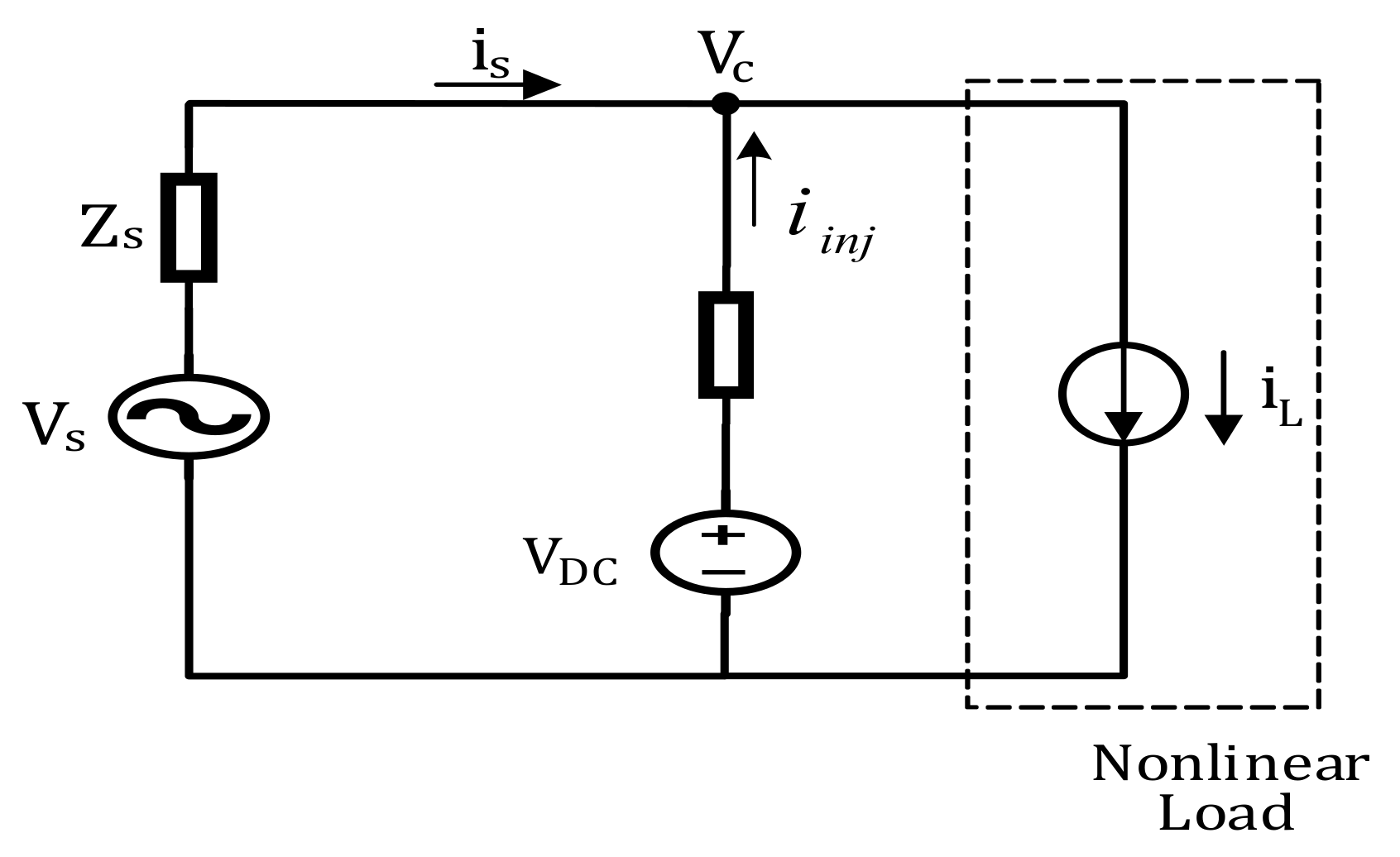
2.1. The SAPF Structure
2.2. Application of the SAPF in the Grid
2.3. The ADALINE Neural Network
2.4. Robust Synchronizer Filter (RSF)
2.5. Robust Synchronizer Quasi-Static Filter (RSQSF) PLL Model for WEAK-GRID Conditions
2.5.1. Conventional PLL
2.5.2. PLL Model Considering the Grid Impedance
2.5.3. Stable PLL under Weak-Grid Conditions
2.6. DC-Link Voltage Regulation
3. Simulation Results
3.1. Nonlinear Load with a Balanced Voltage Source
3.2. Nonlinear Load and Unbalanced Voltage Source under Grid Impedance
3.3. Nonlinear Load and Unbalanced Voltage Source under Weak-Grid Conditions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Garces-Gomez, Y.A.; Hoyos, F.E.; Candelo-Becerra, J.E. Classic Discrete Control Technique and 3D-SVPWM Applied to a Dual Unified Power Quality Conditioner. Appl. Sci. 2019, 9, 5087. [Google Scholar] [CrossRef]
- Das, S.; Ray, P.; Sahoo, A.; Ramasubbareddy, S.; Babu, T.; Kumar, N.; Elavarasan, R.; Mihet-Popa, L. A Comprehensive Survey on Different Control Strategies and Applications of Active Power Filters for Power Quality Improvement. Energies 2021, 14, 4589. [Google Scholar] [CrossRef]
- Hoon, Y.; Radzi, M.A.M.; Zainuri, M.A.A.M.; Zawawi, M.A. Shunt Active Power Filter: A Review on Phase Synchronization Control Techniques. Electronics 2019, 8, 791. [Google Scholar] [CrossRef]
- Hoon, Y.; Radzi, M.A.M.; Hassan, M.K.; Mailah, N.F. Three-phase three-level shunt active power filter with simplified synchronous reference frame. In Proceedings of the IEEE Industrial Electronics and Applications Conference, Kota Kinabalu, Malaysia, 20–22 November 2016; pp. 1–6. [Google Scholar]
- Hoon, Y.; Radzi, M.A.M.; Hassan, M.K.; Mailah, N.F. A Dual-Function Instantaneous Power Theory for Operation of Three-Level Neutral-Point-Clamped Inverter-Based Shunt Active Power Filter. Energies 2018, 11, 1592. [Google Scholar] [CrossRef]
- Chen, D.; Xiao, L.; Yan, W.; Li, Y.; Guo, Y. A harmonics detection method based on triangle orthogonal principle for shunt active power filter. Energy Rep. 2021, 7, 98–104. [Google Scholar] [CrossRef]
- Hu, Y.-C.; Lin, Y.-H.; Lin, C.-H. Artificial Intelligence, Accelerated in Parallel Computing and Applied to Nonintrusive Appliance Load Monitoring for Residential Demand-Side Management in a Smart Grid: A Comparative Study. Appl. Sci. 2020, 10, 8114. [Google Scholar] [CrossRef]
- Iqbal, M.; Jawad, M.; Jaffery, M.H.; Akhtar, S.; Rafiq, M.N.; Qureshi, M.B.; Ansari, A.R.; Nawaz, R. Neural Networks Based Shunt Hybrid Active Power Filter for Harmonic Elimination. IEEE Access 2021, 9, 69913–69925. [Google Scholar] [CrossRef]
- Janpong, S.; Areerak, K.; Areerak, K. Harmonic detection for shunt active power filter using ADALINE neural network. Energies 2021, 14, 4351. [Google Scholar] [CrossRef]
- Wang, H.; Fei, J. Nonsingular Terminal Sliding Mode Control for Active Power Filter Using Recurrent Neural Network. IEEE Access 2018, 6, 67819–67829. [Google Scholar] [CrossRef]
- Qasim, M.; Kanjiya, P.; Khadkikar, V. Optimal Current Harmonic Extractor Based on Unified ADALINEs for Shunt Active Power Filters. IEEE Trans. Power Electron. 2014, 29, 6383–6393. [Google Scholar] [CrossRef]
- Hoon, Y.; Radzi, M.A.M.; Al-Ogaili, A.S. Adaptive Linear Neural Network Approach for Three-Phase Four-Wire Active Power Filtering under Non-Ideal Grid and Unbalanced Load Scenarios. Appl. Sci. 2019, 9, 5304. [Google Scholar] [CrossRef]
- Sang, S.; Pei, B.; Huang, J.; Zhang, L.; Xue, X. Low-Voltage Ride-Through of the Novel Voltage Source-Controlled PMSG-Based Wind Turbine Based on Switching the Virtual Resistor. Appl. Sci. 2021, 11, 6204. [Google Scholar] [CrossRef]
- Sevilmiş, F.; Karaca, H. An advanced hybrid pre-filtering/in-loop-filtering based PLL under adverse grid conditions. Eng. Sci. Technol. Int. J. 2021, 24, 1144–1152. [Google Scholar] [CrossRef]
- Maiti, A.; Syam, P.; Mukherjee, K. Alternate computation of the unit vectors synthesis towards synchronization of current-controlled grid-tie converter for renewable power system: An embedded outlook. Eng. Sci. Technol. Int. J. 2022, 28, 101023. [Google Scholar] [CrossRef]
- Meng, L.; Shu, Z.; Lei, Y.; Yan, H.; Li, Z.; Ma, L.; Yin, X.; He, X. Optimal Input and Output Power Quality Control of Single-Phase AC–DC–DC Converter with Significant DC-Link Voltage Ripple. IEEE Trans. Ind. Electron. 2019, 67, 10366–10376. [Google Scholar] [CrossRef]
- Gu, B.-G.; Nam, K. A DC-link capacitor minimization method through direct capacitor current control. IEEE Trans. Ind. Appl. 2006, 42, 573–581. [Google Scholar] [CrossRef]
- Zhou, J.; Yuan, Y.; Dong, H. Adaptive DC-Link Voltage Control for Shunt Active Power Filters Based on Model Predictive Control. IEEE Access 2020, 8, 208348–208357. [Google Scholar] [CrossRef]
- Fang, J.; Li, X.; Tang, Y. A review of passive power filters for voltage-source converters. In Proceedings of the 2016 Asian Conference on Energy, Power and Transportation Electrification (ACEPT), Singapore, 25–27 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Martinek, R.; Rzidky, J.; Jaros, R.; Bilik, P.; Ladrova, M. Least Mean Squares and Recursive Least Squares Algorithms for Total Harmonic Distortion Reduction Using Shunt Active Power Filter Control. Energies 2019, 12, 1545. [Google Scholar] [CrossRef]
- Panchbhai, A.; Parmar, S.; Prajapati, N. Shunt active filter for harmonic and reactive power compensation using pq theory. In Proceedings of the 2017 International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 16–18 March 2017; pp. 260–264. [Google Scholar]
- Chen, K.F.; Mei, S.L. Composite Interpolated Fast Fourier Transform with the Hanning Window. IEEE Trans. Instrum. Meas. 2010, 59, 1571–1579. [Google Scholar] [CrossRef]
- Eskandari, M.; Savkin, A.V. Robust PLL Synchronization Unit for Grid-Feeding Converters in Micro/Weak Grids. IEEE Trans. Ind. Informatics 2022, 19. [Google Scholar] [CrossRef]
- Hicham, F.; Yousfi, D.; Larbi, E.M.; Youness, A.D. Four-Switch Three-Phase PMSM Converter with Output Voltage Balance and DC-Link Voltage Offset Suppression. Information 2017, 8, 11. [Google Scholar] [CrossRef]
- Butt, O.M.; Butt, T.M.; Ashfaq, M.H.; Talha, M.; Raihan, S.R.S.; Hussain, M.M. Simulative Study to Reduce DC-Link Capacitor of Drive Train for Electric Vehicles. Energies 2022, 15, 4499. [Google Scholar] [CrossRef]
- Longhui, W.; Fang, Z.; Pengbo, Z.; Hongyu, L.; Zhaoan, W. Study on the Influence of Supply-Voltage Fluctuation on Shunt Active Power Filter. IEEE Trans. Power Deliv. 2007, 22, 1743–1749. [Google Scholar] [CrossRef]
- Suresh, D.; Singh, S.P. Performance investigation of the shunt active power filter using neural network. In Proceedings of the 2014 IEEE Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 1–2 March 2014. [Google Scholar]
- Qasim, M.; Khadkikar, V. Application of Artificial Neural Networks for Shunt Active Power Filter Control. IEEE Trans. Ind. Informatics 2014, 10, 1765–1774. [Google Scholar] [CrossRef]
- Cirrincione, M.; Pucci, M.; Vitale, G.; Miraoui, A. Current Harmonic Compensation by a Single-Phase Shunt Active Power Filter Controlled by Adaptive Neural Filtering. IEEE Trans. Ind. Electron. 2009, 56, 3128–3143. [Google Scholar] [CrossRef]
- Benhabib, M.C.; Saadate, S. A New Robust Experimentally Validated Phase Locked Loop for Power Electronic Control. EPE J. 2005, 15, 36–48. [Google Scholar] [CrossRef]
- Djazia, K.; Krim, F.; Chaoui, A.; Sarra, M. Active Power Filtering Using the ZDPC Method under Unbalanced and Distorted Grid Voltage Conditions. Energies 2015, 8, 1584–1605. [Google Scholar] [CrossRef]
- Chaoui, A.; Gaubert, J.P.; Krim, F.; Champenois, G. PI Controlled Three-phase Shunt Active Power Filter for Power Quality Improvement. Electr. Power Compon. Syst. 2007, 35, 1331–1344. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage and frequency | |
| Line impedance | |
| Three-phase diode rectifiers parameters | |
| Shunt active power filter parameters | |
| Voltage loop controller parameters | |
| DC-Link Voltage | 800 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asadi, Y.; Eskandari, M.; Mansouri, M.; Chaharmahali, S.; Moradi, M.H.; Tahriri, M.S. Adaptive Neural Network for a Stabilizing Shunt Active Power Filter in Distorted Weak Grids. Appl. Sci. 2022, 12, 8060. https://doi.org/10.3390/app12168060
Asadi Y, Eskandari M, Mansouri M, Chaharmahali S, Moradi MH, Tahriri MS. Adaptive Neural Network for a Stabilizing Shunt Active Power Filter in Distorted Weak Grids. Applied Sciences. 2022; 12(16):8060. https://doi.org/10.3390/app12168060
Chicago/Turabian StyleAsadi, Yousef, Mohsen Eskandari, Milad Mansouri, Sajjad Chaharmahali, Mohammad H. Moradi, and Mohammad Sajjad Tahriri. 2022. "Adaptive Neural Network for a Stabilizing Shunt Active Power Filter in Distorted Weak Grids" Applied Sciences 12, no. 16: 8060. https://doi.org/10.3390/app12168060
APA StyleAsadi, Y., Eskandari, M., Mansouri, M., Chaharmahali, S., Moradi, M. H., & Tahriri, M. S. (2022). Adaptive Neural Network for a Stabilizing Shunt Active Power Filter in Distorted Weak Grids. Applied Sciences, 12(16), 8060. https://doi.org/10.3390/app12168060