
Real-Time Metaheuristic Algorithm for Dynamic Fuzzification, De-Fuzzification and Fuzzy Reasoning Processes




Abstract
:1. Introduction
- We evaluated how the type-2 FLS are more capable of performing under uncertain conditions and designed and developed a mechanism to integrate them into the proposed type-1 FLC;
- We designed and developed an adaptive metaheuristic FIM for type-1 FLS to overcome the problems that are currently faced when developing realistic fuzzy rules (as shown in Table 1, column 6);
- We designed and developed a fuzzification and de-fuzzification mechanism while integrating the features that were abstracted from the type-2 FLS into type-1 FLS;
- A real-time dynamic metaheuristic algorithm to automatically optimize all of the abovementioned processes related to dynamic fuzzification, de-fuzzification and fuzzy reasoning was designed and developed;
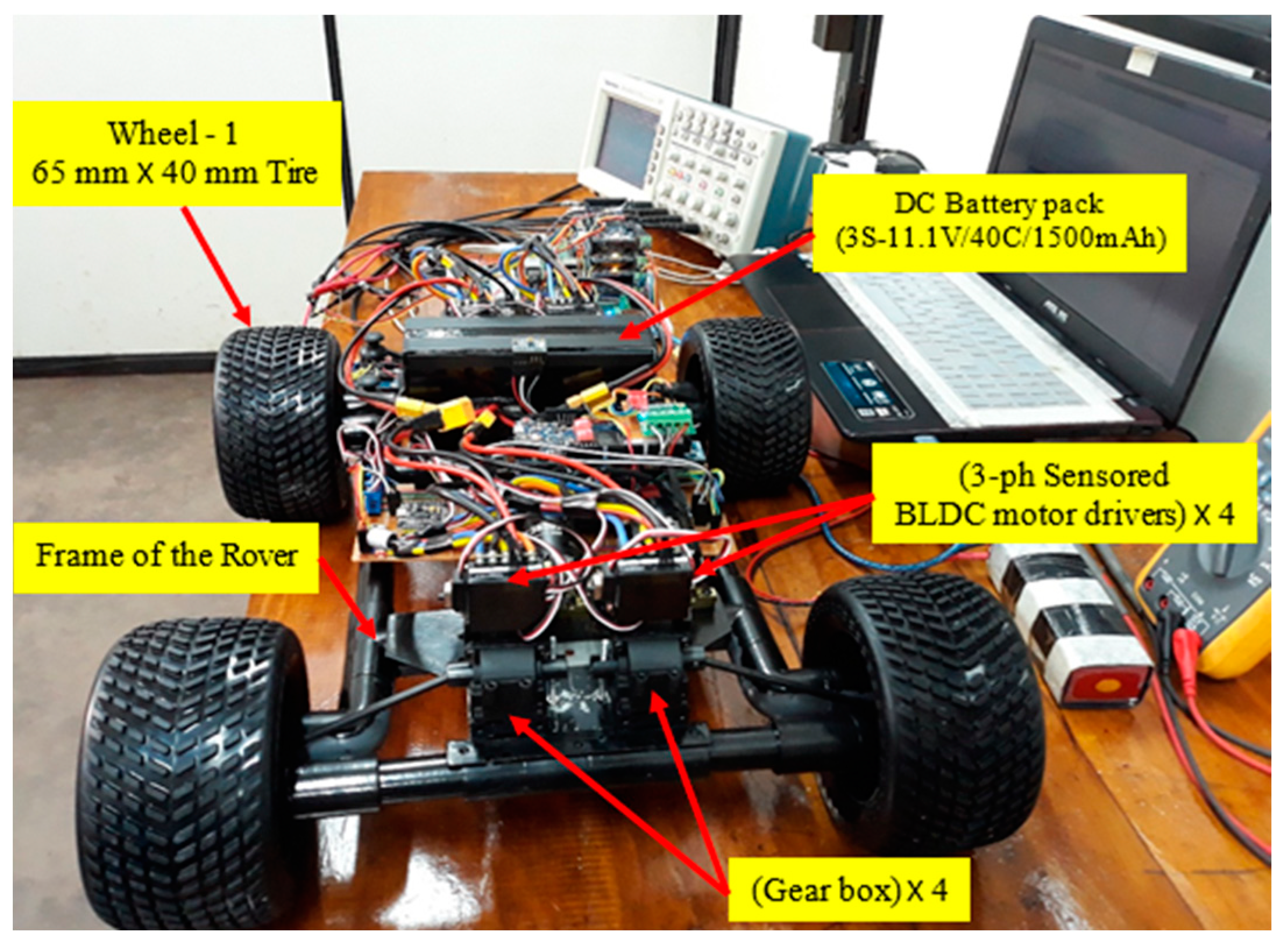
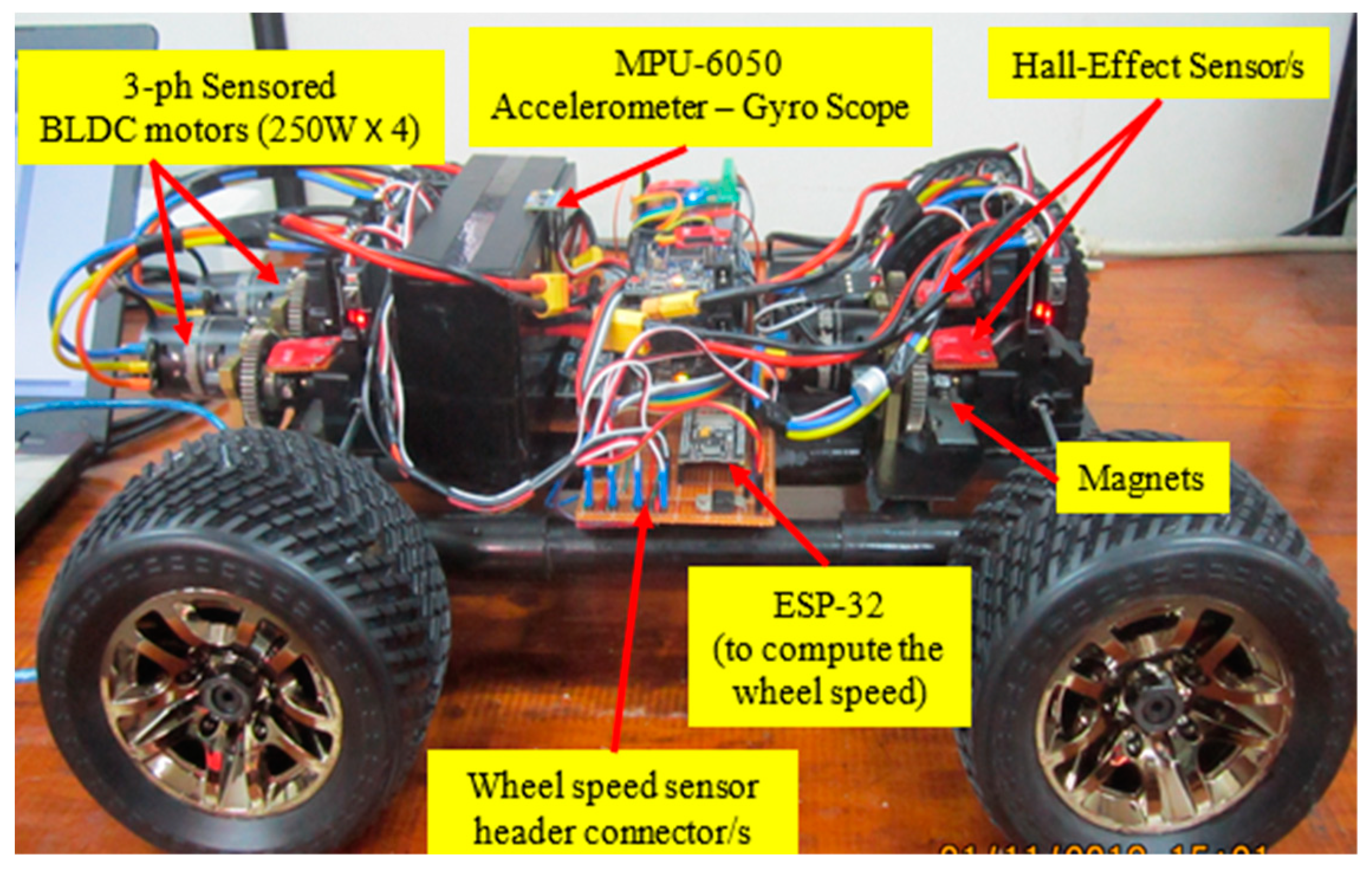
- To examine the performance of the proposed controller as a complex physical phenomenon, a four-wheeled independent-drive electric rover was designed and developed to regulate the wheel slip (under high-speed conditions on slippery roads).
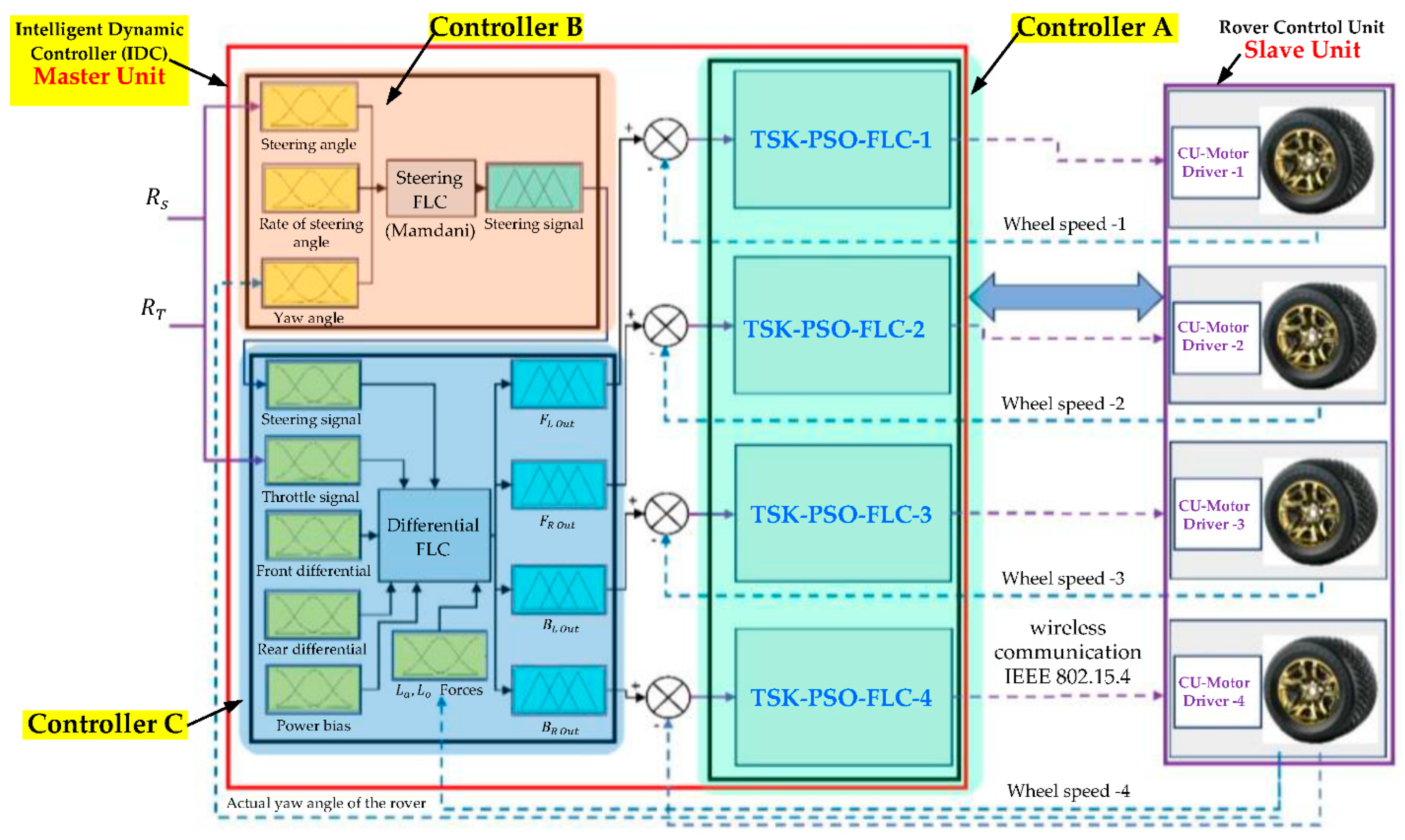
2. Overall System Design
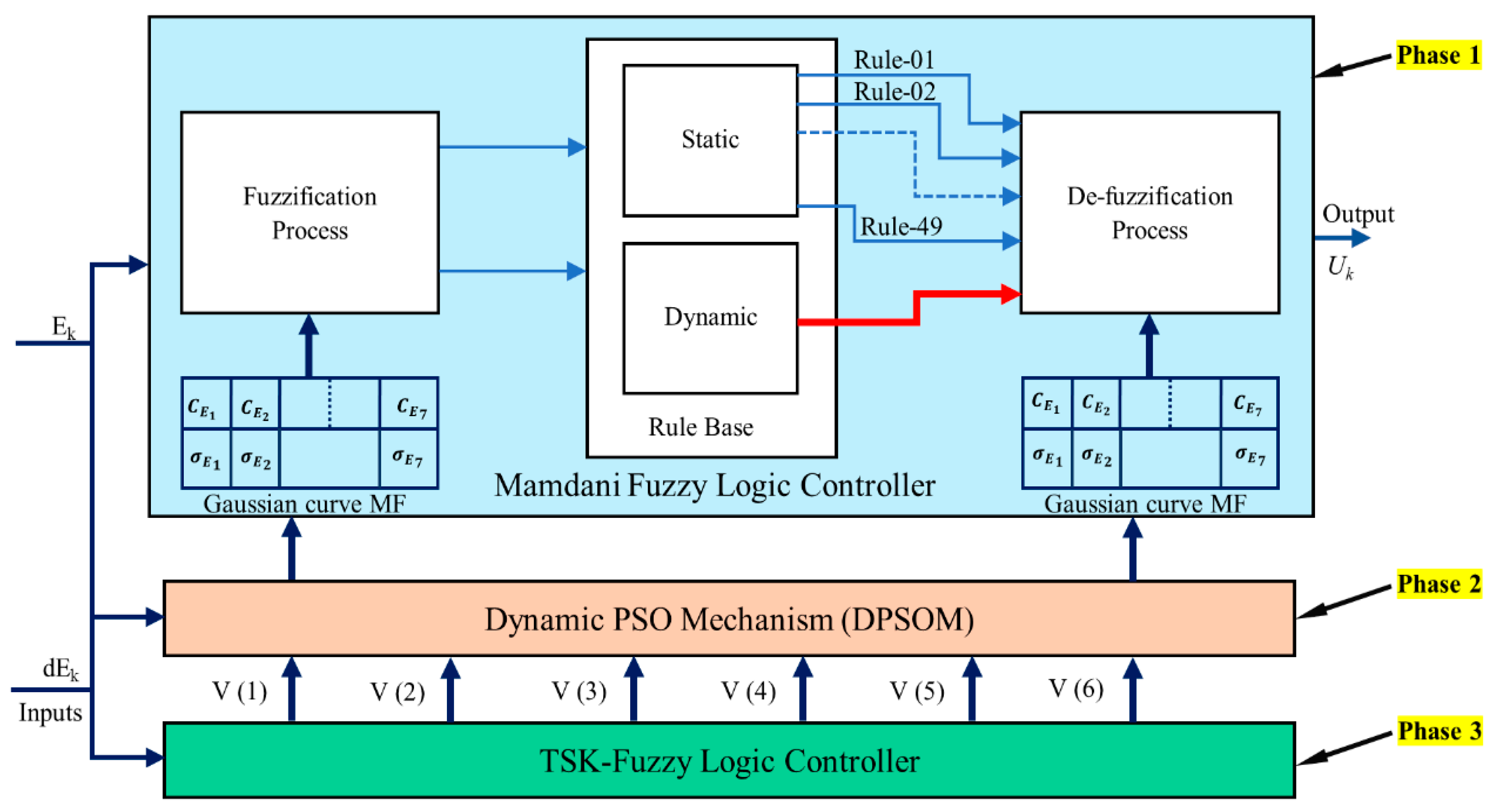
3. Implementation of the Dynamic Metaheuristic Fuzzy Logic Controller (TSK-PSO-FLC)
4. Implementation of the Static Fuzzy Logic Controller (Static FLC)
4.1. Fuzzification Process of the Static Fuzzy Logic Controller
4.2. Implementation of the Fuzzy Inference Mechanism of the Static Fuzzy Logic Controller
| 1.0 | 0.4 | 0.5 | and | 0.7 | 0.1 | ||||
| = | 0.3 | 0.0 | 0.7 | = | 0.2 | 0.9 | |||
| 0.6 | 0.8 | 0.2 | 0.8 | 0.4 |
| V | W | ||||||||||||||
| x | y | z | & | ∗ | |||||||||||
| = | a | 1.0 | 0.4 | 0.5 | = | x | 0.7 | 0.1 | |||||||
| U | b | 0.3 | 0.0 | 0.7 | V | y | 0.2 | 0.9 | |||||||
| c | 0.6 | 0.8 | 0.2 | z | 0.8 | 0.4 | |||||||||
4.3. De-Fuzzification Process of the Static Fuzzy Logic Controller
5. Dynamic Particle Swarm Optimization (PSO) Mechanism
Implementation of the Dynamic PSO Mechanism
6. Implementation of the Dynamic Fuzzy Logic Controller (Dynamic FLC)
6.1. Dynamic Fuzzification Process for the Fuzzy Antecedent and Consequent Dimensions with the Dynamic PSO Mechanism
6.2. Dynamic Fuzzy Reasoning Process Optimized by the PSO
6.3. Optimization of the Dynamic PSO Mechanism to Tune the Proposed Metaherustic FLC
7. Implementation of the Takagi–Sugeno–Kang (TSK) FLC
8. Modelling of Mechanical Dynamics of the Four-Wheeled Independent-Drive Electric Rover
9. Results and Discussion
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameter | Amount with Units |
|---|---|
| Rover Width (W) | 0.415 m |
| Rover Height (H) (Ground clearance) | 0.06 m |
| Rover Length (L) | 0.465 m |
| Diameter of a wheel | 0.13 m |
| Weight of the rover body (MB) | 3.288 kg |
| Weight of a wheel (MWh) | 0.064 kg |
| Total weight of the rover (MR) | 5.066 kg |
References
- Lewandowski, M. A Review of the Commercially Available ECG Detection and Transmission Systems—The Fuzzy Logic Approach in the Prevention of Sudden Cardiac Arrest. Micromachines 2021, 12, 1489. [Google Scholar] [CrossRef] [PubMed]
- Zadeh, L.A. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Gupta, G.S.; Mukhopadhyay, S. Chew Moi Tin A Project Based Approach to Teach Mixed-Signal Embedded Microcontroller for DC Motor Control. In Proceedings of the Third IEEE International Workshop on Electronic Design, Test and Applications (DELTA’06), Kuala Lumpur, Malaysia, 17–19 January 2006; pp. 6–128. [Google Scholar]
- Bárdossy, A.; Duckstein, L. Fuzzy Rule-Based Modeling with Applications to Geophysical, Biological, and Engineering Systems; Systems Engineering Series; CRC Press: Boca Raton, FL, USA, 1995; ISBN 978-0-8493-7833-1. [Google Scholar]
- Jubair, A.M.; Hassan, R.; Aman, A.H.M.; Sallehudin, H.; Al-Mekhlafi, Z.G.; Mohammed, B.A.; Alsaffar, M.S. Optimization of Clustering in Wireless Sensor Networks: Techniques and Protocols. Appl. Sci. 2021, 11, 11448. [Google Scholar] [CrossRef]
- Badillo-Márquez, A.E.; Aguilar-Lasserre, A.A.; Miranda-Ackerman, M.A.; Sandoval-González, O.O.; Villanueva-Vásquez, D.; Posada-Gómez, R. An Agent-Based Model-Driven Decision Support System for Assessment of Agricultural Vulnerability of Sugarcane Facing Climatic Change. Mathematics 2021, 9, 3061. [Google Scholar] [CrossRef]
- Ivančan, J.; Lisjak, D. New FMEA Risks Ranking Approach Utilizing Four Fuzzy Logic Systems. Machines 2021, 9, 292. [Google Scholar] [CrossRef]
- Ilyas, T.; Mahmood, D.; Ahmed, G.; Akhunzada, A. Symptom Analysis Using Fuzzy Logic for Detection and Monitoring of COVID-19 Patients. Energies 2021, 14, 7023. [Google Scholar] [CrossRef]
- Shehab, E.; Meiirbekov, A.; Amantayeva, A.; Suleimen, A.; Tokbolat, S.; Sarfraz, S.; Ali, M.H. A Fuzzy Logic-Based Cost Modelling System for Recycling Carbon Fibre Reinforced Composites. Polymers 2021, 13, 4370. [Google Scholar] [CrossRef] [PubMed]
- Saoudi, A.; Krim, S.; Mimouni, M.F. Enhanced Intelligent Closed Loop Direct Torque and Flux Control of Induction Motor for Standalone Photovoltaic Water Pumping System. Energies 2021, 14, 8245. [Google Scholar] [CrossRef]
- Santosa, S.H.; Hidayat, A.P.; Siskandar, R. SAFEA Application Design on Determining the Optimal Order Quantity of Chicken Eggs Based on Fuzzy Logic. IAES Int. J. Artif. Intell. IJ-AI 2021, 10, 858. [Google Scholar] [CrossRef]
- Biber, P.; Schwaiger, F.; Poschenrieder, W.; Pretzsch, H. A Fuzzy Logic-Based Approach for Evaluating Forest Ecosystem Service Provision and Biodiversity Applied to a Case Study Landscape in Southern Germany. Eur. J. For. Res. 2021, 140, 1559–1586. [Google Scholar] [CrossRef]
- Yang, H.; Chen, Z.; Ye, Y.; Chen, G.; Zeng, F.; Zhao, C. A Fuzzy Logic Model for Early Warning of Algal Blooms in a Tidal-Influenced River. Water 2021, 13, 3118. [Google Scholar] [CrossRef]
- Żyluk, A.; Kuźma, K.; Grzesik, N.; Zieja, M.; Tomaszewska, J. Fuzzy Logic in Aircraft Onboard Systems Reliability Evaluation—A New Approach. Sensors 2021, 21, 7913. [Google Scholar] [CrossRef] [PubMed]
- Nirmala, R.; Venkatesan, S. Inverter Current Control for Reactive Power Compensation in Solar Grid System Using Self-Tuned Fuzzy Logic Controller. Automatika 2022, 63, 102–121. [Google Scholar] [CrossRef]
- Muhammad, R. A Fuzzy Logic Model for the Analysis of Ultrasonic Vibration Assisted Turning and Conventional Turning of Ti-Based Alloy. Materials 2021, 14, 6572. [Google Scholar] [CrossRef] [PubMed]
- Binkowski, T. Fuzzy Logic Based Synchronization Method for Solar Powered High Frequency On-Board Grid. Energies 2021, 14, 8194. [Google Scholar] [CrossRef]
- Babanezhad, M.; Zabihi, S.; Behroyan, I.; Nakhjiri, A.T.; Marjani, A.; Shirazian, S. Prediction of Gas Velocity in Two-Phase Flow Using Developed Fuzzy Logic System with Differential Evolution Algorithm. Sci. Rep. 2021, 11, 2380. [Google Scholar] [CrossRef] [PubMed]
- Otwinowski, H.; Krzywanski, J.; Urbaniak, D.; Wylecial, T.; Sosnowski, M. Comprehensive Knowledge-Driven AI System for Air Classification Process. Materials 2021, 15, 45. [Google Scholar] [CrossRef] [PubMed]
- Fannakh, M.; Larbi Elhafyani, M.; Zouggar, S.; Zahboune, H. Overall Fuzzy Logic Control Strategy of Direct Driven PMSG Wind Turbine Connected to Grid. Int. J. Electr. Comput. Eng. IJECE 2021, 11, 5515. [Google Scholar] [CrossRef]
- Omar, H.M. Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles. Aerospace 2021, 8, 400. [Google Scholar] [CrossRef]
- Castro, L.; Bueno-López, M.; Mora-Flórez, J. Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids. Computation 2021, 9, 134. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Liu, W.; Wang, Q. A Novel Fuzzy PI Control Method for Variable Frequency Brushless Synchronous Generators. Energies 2021, 14, 7950. [Google Scholar] [CrossRef]
- Giel, R.; Kierzkowski, A. A Fuzzy Multi-Criteria Model for Municipal Waste Treatment Systems Evaluation Including Energy Recovery. Energies 2021, 15, 31. [Google Scholar] [CrossRef]
- Chen, J.; Lu, Q.; Bai, J.; Xu, X.; Yao, Y.; Fang, W. A Temperature Control Method for Microaccelerometer Chips Based on Genetic Algorithm and Fuzzy PID Control. Micromachines 2021, 12, 1511. [Google Scholar] [CrossRef]
- Fahassa, C.; Zahraoui, Y.; Akherraz, M.; Kharrich, M.; Elattar, E.E.; Kamel, S. Induction Motor DTC Performance Improvement by Inserting Fuzzy Logic Controllers and Twelve-Sector Neural Network Switching Table. Mathematics 2022, 10, 1357. [Google Scholar] [CrossRef]
- Kumar, Y.V.P.; Rao, S.N.V.B.; Padma, K.; Reddy, C.P.; Pradeep, D.J.; Flah, A.; Kraiem, H.; Jasiński, M.; Nikolovski, S. Fuzzy Hysteresis Current Controller for Power Quality Enhancement in Renewable Energy Integrated Clusters. Sustainability 2022, 14, 4851. [Google Scholar] [CrossRef]
- Khoi, P.B.; Nguyen Xuan, H. Fuzzy Logic-Based Controller for Bipedal Robot. Appl. Sci. 2021, 11, 11945. [Google Scholar] [CrossRef]
- Ntakolia, C.; Lyridis, D.V. A Swarm Intelligence Graph-Based Pathfinding Algorithm Based on Fuzzy Logic (SIGPAF): A Case Study on Unmanned Surface Vehicle Multi-Objective Path Planning. J. Mar. Sci. Eng. 2021, 9, 1243. [Google Scholar] [CrossRef]
- Fuzzy Logic and Modified Butterfly Optimization with Efficient Fault Detection and Recovery Mechanisms for Secured Fault-Tolerant Routing in Wireless Sensor Networks. Int. J. Intell. Eng. Syst. 2021, 14, 402–416. [CrossRef]
- Zulaikha Beevi, S.; Alabdulatif, A. Optimal Routing Protocol for Wireless Sensor Network Using Genetic Fuzzy Logic System. Comput. Mater. Contin. 2022, 70, 4107–4122. [Google Scholar] [CrossRef]
- Correa-Caicedo, P.J.; Rostro-González, H.; Rodriguez-Licea, M.A.; Gutiérrez-Frías, Ó.O.; Herrera-Ramírez, C.A.; Méndez-Gurrola, I.I.; Cano-Lara, M.; Barranco-Gutiérrez, A.I. GPS Data Correction Based on Fuzzy Logic for Tracking Land Vehicles. Mathematics 2021, 9, 2818. [Google Scholar] [CrossRef]
- Razali, N.A.; Abdul Ghani, N.M.; Bari, B.S. Lifting and Stabilizing of Two-Wheeled Wheelchair System Using Interval Type-2 Fuzzy Logic Control Based Spiral Dynamic Algorithm. Bull. Electr. Eng. Inform. 2021, 10, 3019–3031. [Google Scholar] [CrossRef]
- Stefek, A.; Frantis, P. Optimization of Fuzzy Logic Based Virtual Pilot for Wargaming. Mathematics 2021, 9, 3169. [Google Scholar] [CrossRef]
- Sibilska-Mroziewicz, A.; Ordys, A.; Możaryn, J.; Alinaghi Hosseinabadi, P.; Soltani Sharif Abadi, A.; Pota, H. LQR and Fuzzy Logic Control for the Three-Area Power System. Energies 2021, 14, 8522. [Google Scholar] [CrossRef]
- Méndez, J.I.; Meza-Sánchez, A.V.; Ponce, P.; McDaniel, T.; Peffer, T.; Meier, A.; Molina, A. Smart Homes as Enablers for Depression Pre-Diagnosis Using PHQ-9 on HMI through Fuzzy Logic Decision System. Sensors 2021, 21, 7864. [Google Scholar] [CrossRef] [PubMed]
- Arboleda, E.R.; De Jesus, C.L.T.; Tia, L.M.S. Pineapple Maturity Classifier Using Image Processing and Fuzzy Logic. IAES Int. J. Artif. Intell. IJ-AI 2021, 10, 830. [Google Scholar] [CrossRef]
- Guevara, C.; Bonilla, D. Algorithm for Preventing the Spread of COVID-19 in Airports and Air Routes by Applying Fuzzy Logic and a Markov Chain. Mathematics 2021, 9, 3040. [Google Scholar] [CrossRef]
- Tholen, C.; El-Mihoub, T.A.; Nolle, L.; Zielinski, O. Artificial Intelligence Search Strategies for Autonomous Underwater Vehicles Applied for Submarine Groundwater Discharge Site Investigation. J. Mar. Sci. Eng. 2021, 10, 7. [Google Scholar] [CrossRef]
- Nasser, A.R.; Azar, A.T.; Humaidi, A.J.; Al-Mhdawi, A.K.; Ibraheem, I.K. Intelligent Fault Detection and Identification Approach for Analog Electronic Circuits Based on Fuzzy Logic Classifier. Electronics 2021, 10, 2888. [Google Scholar] [CrossRef]
- Wang, N.; Peng, X.; Kong, L. Optimum Design of a Composite Optical Receiver by Taguchi and Fuzzy Logic Methods. Micromachines 2021, 12, 1434. [Google Scholar] [CrossRef] [PubMed]
- Tian, G.; Zheng, Y.; Liu, G.; Zhang, J. SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid. Energies 2022, 15, 2943. [Google Scholar] [CrossRef]
- Malyszko, M. Fuzzy Logic in Selection of Maritime Search and Rescue Units. Appl. Sci. 2021, 12, 21. [Google Scholar] [CrossRef]
- Hao, Y.; Li, S.; Xia, Q.; Wang, M. Type-2 Combined T-S Adaptive Fuzzy Control. Math. Probl. Eng. 2020, 2020, 3479389. [Google Scholar] [CrossRef]
- Woźniak, M.; Zielonka, A.; Sikora, A. Driving Support by Type-2 Fuzzy Logic Control Model. Expert Syst. Appl. 2022, 207, 117798. [Google Scholar] [CrossRef]
- Sanchez, M.A.; Castillo, O.; Castro, J.R. Generalized Type-2 Fuzzy Systems for Controlling a Mobile Robot and a Performance Comparison with Interval Type-2 and Type-1 Fuzzy Systems. Expert Syst. Appl. 2015, 42, 5904–5914. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, C.; Zhao, T.; Tong, W.; Bao, Q.; Mao, Y. Dynamic High-Type Interval Type-2 Fuzzy Logic Control for Photoelectric Tracking System. Processes 2022, 10, 562. [Google Scholar] [CrossRef]
- Fadzlina Jamin, N.; Abdul Ghani, N.M.; Ibrahim, Z.; Kasruddin Nasir, A.N.; Rashid, M.; Osman Tokhi, M. Stabilizing Control of Two-Wheeled Wheelchair with Movable Payload Using Optimized Interval Type-2 Fuzzy Logic. J. Low Freq. Noise Vib. Act. Control 2021, 40, 1585–1606. [Google Scholar] [CrossRef]
- Hemeyine, A.V.; Abbou, A.; Bakouri, A.; Mokhlis, M.; El Moustapha, S.M. ould M. A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator. Inventions 2021, 6, 21. [Google Scholar] [CrossRef]
- Azwan bin Abdul Razak, A.; Nor Kasruddin bin Nasir, A.; Maniha Abdul Ghani, N.; Mohammad, S.; Falfazli Mat Jusof, M.; Amira Mhd Rizal, N. Hybrid Genetic Manta Ray Foraging Optimization and Its Application to Interval Type 2 Fuzzy Logic Control of An Inverted Pendulum System. IOP Conf. Ser. Mater. Sci. Eng. 2020, 917, 012082. [Google Scholar] [CrossRef]
- Muthugala, M.A.V.J.; Samarakoon, S.M.B.P.; Mohan Rayguru, M.; Ramalingam, B.; Elara, M.R. Wall-Following Behavior for a Disinfection Robot Using Type 1 and Type 2 Fuzzy Logic Systems. Sensors 2020, 20, 4445. [Google Scholar] [CrossRef]
- Tang, G.; Chiclana, F.; Lin, X.; Liu, P. Interval Type-2 Fuzzy Multi-Attribute Decision-Making Approaches for Evaluating the Service Quality of Chinese Commercial Banks. Knowl.-Based Syst. 2020, 193, 105438. [Google Scholar] [CrossRef]
- Tafti, B.E.F.; Teshnehlab, M.; Khanesar, M.A. Recurrent Interval Type-2 Fuzzy Wavelet Neural Network with Stable Learning Algorithm: Application to Model-Based Predictive Control. Int. J. Fuzzy Syst. 2020, 22, 351–367. [Google Scholar] [CrossRef]
- Murugeswari, P.; Vijayalakshmi, S. New Method of Internal Type-2 Fuzzy-Based CNN for Image Classification. Int. J. FUZZY Log. Intell. Syst. 2020, 20, 336–345. [Google Scholar] [CrossRef]
- Giripunje, L.M.; Vidyarthi, A.; Shandilya, S.K. Adaptive Congestion Prediction in Vehicular Ad-Hoc Networks (VANET) Using Type-2 Fuzzy Model to Establish Reliable Routes. Wirel. Pers. Commun. 2022, 125, 3527–3548. [Google Scholar] [CrossRef]
- Marjani, A.; Babanezhad, M.; Shirazian, S. Application of Adaptive Network-Based Fuzzy Inference System (ANFIS) in the Numerical Investigation of Cu/Water Nanofluid Convective Flow. Case Stud. Therm. Eng. 2020, 22, 100793. [Google Scholar] [CrossRef]
- Rozman, J.; Hagras, H.; Perez, J.A.; Clarke, D.; Muller, B.; Data, S.F. Privacy-Preserving Gesture Recognition with Explainable Type-2 Fuzzy Logic Based Systems. In Proceedings of the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- D’Alterio, P.; Garibaldi, J.M.; John, R.I. Constrained Interval Type-2 Fuzzy Classification Systems for Explainable AI (XAI). In Proceedings of the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Chimatapu, R.; Hagras, H.; Kern, M.; Owusu, G. Hybrid Deep Learning Type-2 Fuzzy Logic Systems for Explainable AI. In Proceedings of the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, UK, 19–24 July; 2020; pp. 1–6. [Google Scholar]
- Bustan and Hoda Moodi, D. Adaptive Interval Type-2 Fuzzy Controller for Variable-Speed Wind Turbine. J. Mod. Power Syst. Clean Energy 2022, 10, 524–530. [Google Scholar] [CrossRef]
- Zouari, M.; Baklouti, N.; Sanchez-Medina, J.; Kammoun, H.M.; Ayed, M.B.; Alimi, A.M. PSO-Based Adaptive Hierarchical Interval Type-2 Fuzzy Knowledge Representation System (PSO-AHIT2FKRS) for Travel Route Guidance. IEEE Trans. Intell. Transp. Syst. 2022, 23, 804–818. [Google Scholar] [CrossRef]
- Luo, G.; Li, H.; Ma, B.; Wang, Y. Design and Experimental Research of Observer-Based Adaptive Type-2 Fuzzy Steering Control for Automated Vehicles with Prescribed Performance. Mechatronics 2022, 81, 102700. [Google Scholar] [CrossRef]
- Amirkhani, A.; Shirzadeh, M.; Molaie, M. An Indirect Type-2 Fuzzy Neural Network Optimized by the Grasshopper Algorithm for Vehicle ABS Controller. IEEE Access 2022, 10, 58736–58751. [Google Scholar] [CrossRef]
- Boukhalfa, A.; Khettab, K.; Essounbouli, N. Novel Hybrid Interval Type-2 Fuzzy Adaptive Backstepping Control for a Class of Uncertain Discrete-Time Nonlinear Systems. J. Eur. Systèmes Autom. 2021, 54, 733–741. [Google Scholar] [CrossRef]
- He, C.; Mahfouf, M.; Torres-Salomao, L.A. An Adaptive General Type-2 Fuzzy Logic Approach for Psychophysiological State Modeling in Real-Time Human–Machine Interfaces. IEEE Trans. Hum.-Mach. Syst. 2021, 51, 1–11. [Google Scholar] [CrossRef]
- Shadoul, M.; Yousef, H.; Al Abri, R.; Al-Hinai, A. Adaptive Interval Type-2 Fuzzy Tracking Control of PV Grid-Connected Inverters. IEEE Access 2021, 9, 130853–130861. [Google Scholar] [CrossRef]
- Chen, X.; Tong, W.; Mao, Y.; Zhao, T. Interval Type-2 Fuzzy Dynamic High Type Control of Permanent Magnet Synchronous Motor with Vector Decoupling Method. Actuators 2021, 10, 293. [Google Scholar] [CrossRef]
- Prasad, R.R.; Durgasukuamar, G. Performance Analysis of PI, T1NFC, and T2NFC of Indirect Vector Control-Based Induction Motor Using DSpace-2812. J. Eur. Systèmes Autom. 2021, 54, 671–682. [Google Scholar] [CrossRef]
- Dilmi, I.; Bouguerra, A.; Djrioui, A.; Chrifi-Alaoui, L. Interval Type-2 Fuzzy Logic-Second Order Sliding Mode Based Fault Detection and Active Fault-Tolerant Control of Brushless DC Motor. J. Eur. Systèmes Autom. 2021, 54, 475–485. [Google Scholar] [CrossRef]
- Henini, N.; Tlemcani, A.; Barkat, S. Adaptive Interval Type-2 Fuzzy Controller Based Direct Torque Control of Permanent Magnet Synchronous Motor. Adv. Electr. Comput. Eng. 2021, 21, 15–22. [Google Scholar] [CrossRef]
- Saritas, I.; Buyukyildiz, C. Sensorless Brushless DC Motor Control Using Type-2 Fuzzy Logic. Int. J. Intell. Syst. Appl. Eng. 2020, 8, 184–190. [Google Scholar] [CrossRef]
- Abed, H.Y.; Humod, A.T.; Humaidi, A.J. Type 1 versus Type 2 Fuzzy Logic Speed Controllers for Brushless Dc Motors. Int. J. Electr. Comput. Eng. IJECE 2020, 10, 265. [Google Scholar] [CrossRef]
- Ullah, I.; Youn, H.Y.; Han, Y.-H. Integration of Type-2 Fuzzy Logic and Dempster–Shafer Theory for Accurate Inference of IoT-Based Health-Care System. Future Gener. Comput. Syst. 2021, 124, 369–380. [Google Scholar] [CrossRef]
- Rozman, J.; Hagras, H.; Andreu-Perez, J.; Clarke, D.; Muller, B.; Fitz, S. A Type-2 Fuzzy Logic Based Explainable AI Approach for the Easy Calibration of AI Models in IoT Environments. In Proceedings of the 2021 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Luxembourg, Luxembourg, 11 July 2021; pp. 1–8. [Google Scholar]
- Sennan, S.; Ramasubbareddy, S.; Balasubramaniyam, S.; Nayyar, A.; Abouhawwash, M.; Hikal, N.A. T2FL-PSO: Type-2 Fuzzy Logic-Based Particle Swarm Optimization Algorithm Used to Maximize the Lifetime of Internet of Things. IEEE Access 2021, 9, 63966–63979. [Google Scholar] [CrossRef]
- Jana, D.K.; Basu, S. Novel Internet of Things (IoT) for Controlling Indoor Temperature via Gaussian Type-2 Fuzzy Logic. Int. J. Model. Simul. 2021, 41, 92–100. [Google Scholar] [CrossRef]
- Tolga, A.C. Real Options Valuation of an IoT Based Healthcare Device with Interval Type-2 Fuzzy Numbers. Socioecon. Plann. Sci. 2020, 69, 100693. [Google Scholar] [CrossRef]
- Hosseinpour, M.; Ghaemi, S.; Khanmohammadi, S.; Daneshvar, S. A Hybrid High-order Type-2 FCM Improved Random Forest Classification Method for Breast Cancer Risk Assessment. Appl. Math. Comput. 2022, 424, 127038. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, L.; Zhou, J.; Li, T.; Chen, C.L.P. Interval Type-2 Outlier-Robust Picture Fuzzy Clustering and Its Application in Medical Image Segmentation. Appl. Soft Comput. 2022, 122, 108891. [Google Scholar] [CrossRef]
- Ghozzi, Y.; Baklouti, N.; Hagras, H.; Ayed, M.B.; Alimi, A.M. Interval Type-2 Beta Fuzzy Near Sets Approach to Content-Based Image Retrieval. IEEE Trans. Fuzzy Syst. 2022, 30, 805–817. [Google Scholar] [CrossRef]
- Sharma, T.; Verma, N.K. Estimating Depth and Global Atmospheric Light for Image Dehazing Using Type-2 Fuzzy Approach. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 6, 93–102. [Google Scholar] [CrossRef]
- Ali, N.A.; abbassi, A.E.; Cherradi, B. The Performances of Iterative Type-2 Fuzzy C-Mean on GPU for Image Segmentation. J. Supercomput. 2022, 78, 1583–1601. [Google Scholar] [CrossRef]
- Tavoosi, J.; Zhang, C.; Mohammadzadeh, A.; Mobayen, S.; Mosavi, A.H. Medical Image Interpolation Using Recurrent Type-2 Fuzzy Neural Network. Front. Neuroinformatics 2021, 15, 667375. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.-P.; Singh, P.; Kuo, W.-L.; Chu, H.-C. A Type-2 Fuzzy Clustering and Quantum Optimization Approach for Crops Image Segmentation. Int. J. Fuzzy Syst. 2021, 23, 615–629. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, Q.; Guo, H.; Zhang, H. A Type-2 Fuzzy Approach to Driver-Automation Shared Driving Lane Keeping Control of Semi-Autonomous Vehicles Under Imprecise Premise Variable. Chin. J. Mech. Eng. 2022, 35, 46. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, K.; Guo, P.; Jiang, W.; Wu, X.; Sun, W. Design of Type-2 Fuzzy Fractional-Order Proportional-Integral-Derivative Controller and Multi-Objective Parameter Optimization under Load Reduction Condition of the Pumped Storage Unit. J. Energy Storage 2022, 50, 104227. [Google Scholar] [CrossRef]
- Zeng, Y.; Lam, H.-K.; Xiao, B.; Wu, L. ℓ₂–ℓ∞ Control of Discrete-Time State-Delay Interval Type-2 Fuzzy Systems via Dynamic Output Feedback. IEEE Trans. Cybern. 2022, 52, 4198–4208. [Google Scholar] [CrossRef] [PubMed]
- Sain, D.; Praharaj, M.; Bosukonda, M.M. A Simple Modelling Strategy for Integer Order and Fractional Order Interval Type-2 Fuzzy PID Controllers with Their Simulation and Real-Time Implementation. Expert Syst. Appl. 2022, 202, 117196. [Google Scholar] [CrossRef]
- Tahamipour-Z, S.M.; Akbarzadeh-T, M.-R.; Baghbani, F. Interval Type-2 Generalized Fuzzy Hyperbolic Modelling and Control of Nonlinear Systems. Appl. Soft Comput. 2022, 123, 108859. [Google Scholar] [CrossRef]
- Wei, X.-J.; Zhang, D.-Q.; Huang, S.-J. A Variable Selection Method for a Hierarchical Interval Type-2 TSK Fuzzy Inference System. Fuzzy Sets Syst. 2022, 438, 46–61. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, Z. Entropy and Semi-Entropies of Regular Symmetrical Triangular Interval Type-2 Fuzzy Variables. Symmetry 2022, 14, 930. [Google Scholar] [CrossRef]
- Wu, H.; Zhao, T. Design of Interval Type-2 Fuzzy Fractional Order PID Controller Based on Particle Swarm Optimization. J. Phys. Conf. Ser. 2022, 2258, 012063. [Google Scholar] [CrossRef]
- Sun, D.; Liao, Q.; Loutfi, A. Type-2 Fuzzy Model-Based Movement Primitives for Imitation Learning. IEEE Trans. Robot. 2022, 38, 2462–2480. [Google Scholar] [CrossRef]
- Karimi, M.; Tahayori, H.; Tirdad, K.; Sadeghian, A. A Perceptual Computer for Hierarchical Portfolio Selection Based on Interval Type-2 Fuzzy Sets. Granul. Comput. 2022. [Google Scholar] [CrossRef]
- Sarbaz, M.; Zamani, I.; Manthouri, M.; Ibeas, A. Decentralized Robust Interval Type-2 Fuzzy Model Predictive Control for Takagi–Sugeno Large-Scale Systems. Automatika 2022, 63, 49–63. [Google Scholar] [CrossRef]
- Khairuddin, S.H.; Hasan, M.H.; Akhir, E.A.P.; Hashmani, M.A. Generating Type 2 Trapezoidal Fuzzy Membership Function Using Genetic Tuning. Comput. Mater. Contin. 2022, 71, 717–734. [Google Scholar] [CrossRef]
- Wang, M.; Wang, Y.; Chen, G. Interval Type-2 Fuzzy Neural Network Based Constrained GPC for NH$$_{3}$$ Flow in SCR de-NO$$_{x}$$ Process. Neural Comput. Appl. 2021, 33, 16057–16078. [Google Scholar] [CrossRef]
- Ontiveros-Robles, E.; Melin, P.; Castillo, O. An Efficient High-Order α-Plane Aggregation in General Type-2 Fuzzy Systems Using Newton–Cotes Rules. Int. J. Fuzzy Syst. 2021, 23, 1102–1121. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, H.; Jiang, H.; Han, J. Unknown Input Based Observer Synthesis for an Interval Type-2 Polynomial Fuzzy System with Time Delays and Uncertainties. Neurocomputing 2019, 339, 171–181. [Google Scholar] [CrossRef]
- Pal, S.S.; Kar, S. A Hybridized Forecasting Method Based on Weight Adjustment of Neural Network Using Generalized Type-2 Fuzzy Set. Int. J. Fuzzy Syst. 2019, 21, 308–320. [Google Scholar] [CrossRef]
- Guzay, C.; Kumbasar, T. Aggressive Maneuvering of a Quadcopter via Differential Flatness-Based Fuzzy Controllers: From Tuning to Experiments. Appl. Soft Comput. 2022, 126, 109223. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. A Review on Interval Type-2 Fuzzy Logic Applications in Intelligent Control. Inf. Sci. 2014, 279, 615–631. [Google Scholar] [CrossRef]
- Gupta, G.S.; Mukhopadhyay, S.C.; Messom, C.H.; Demidenko, S.N. Master–Slave Control of a Teleoperated Anthropomorphic Robotic Arm With Gripping Force Sensing. IEEE Trans. Instrum. Meas. 2006, 55, 2136–2145. [Google Scholar] [CrossRef]
- Jayetileke, H.R.; de Mel, W.R.; Ratnayake, H.U.W. Dynamic Optimization Self-Adaptive AI Controller for a Four-Wheel Independent Drive Electric Rover. Adv. Technol. 2021, 1, 127–145. [Google Scholar] [CrossRef]
- Jayetileke, H.R.; de Mei, W.R.; Ratnayake, H.U.W. Real-Time Fuzzy Logic Speed Tracking Controller for a DC Motor Using Arduino Due. In Proceedings of the 7th International Conference on Information and Automation for Sustainability, Colombo, Sri Lanka, 22–24 December 2014; pp. 1–6. [Google Scholar]
- Gui, P.; Tang, L.; Mukhopadhyay, S. Tree Pruning Robot Tilting Control Using Fuzzy Logic. In Proceedings of the 2017 Eleventh International Conference on Sensing Technology (ICST), Sydney, Australia, 4–6 December 2017; pp. 1–5. [Google Scholar]
- Eberhart, R.; Kennedy, J. A New Optimizer Using Particle Swarm Theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science (MHS’95), Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Schutte, J.F.; Groenwold, A.A. A Study of Global Optimization Using Particle Swarms. J. Glob. Optim. 2005, 31, 93–108. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.C.; Ohji, T.; Iwahara, M.; Yamada, S. Modeling and Control of a New Horizontal-Shaft Hybrid-Type Magnetic Bearing. IEEE Trans. Ind. Electron. 2000, 47, 100–108. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.C.; Ohjj, T.; Iwahara, M.; Yamada, S. Design, Analysis and Control of a New Repulsive-Type Magnetic Bearing System. IEE Proc.-Electr. Power Appl. 1999, 146, 33. [Google Scholar] [CrossRef]
- Ling, H.; Huang, B. Research on Torque Distribution of Four-Wheel Independent Drive Off-Road Vehicle Based on PRLS Road Slope Estimation. Math. Probl. Eng. 2021, 2021, 5399588. [Google Scholar] [CrossRef]
- Ha, V.Q.; Pham, S.H.-T.; Vu, N.T.-T. Adaptive Fuzzy Type-II Controller for Wheeled Mobile Robot with Disturbances and Wheelslips. J. Robot. 2021, 2021, 6946210. [Google Scholar] [CrossRef]
- Liang, Z.; Wang, Y.; Chen (Shen), G. Control for Four-Wheel Independently Driven Electric Vehicles to Improve Steering Performance Using H ∞ and Moore–Penrose Theory. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2019, 233, 1466–1479. [Google Scholar] [CrossRef]
- Yin, D.; Wang, J.; Du, J.; Chen, G.; Hu, J.-S. A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. Actuators 2021, 10, 122. [Google Scholar] [CrossRef]
- Khessam, M.; Lousdad, A.; Hazzab, A.; Rezkallah, M.; Chandra, A. A New Application for Fast Prediction and Protection of Electrical Drive Wheel Speed Using Machine Learning Methodology. Indones. J. Electr. Eng. Comput. Sci. 2022, 26, 1290. [Google Scholar] [CrossRef]
- Zhang, D.; Song, Q.; Wang, G.; Liu, C. A Novel Longitudinal Speed Estimator for Four-Wheel Slip in Snowy Conditions. Appl. Sci. 2021, 11, 2809. [Google Scholar] [CrossRef]
- Wang, J.; Lv, S.; Sun, N.; Gao, S.; Sun, W.; Zhou, Z. Torque Vectoring Control of RWID Electric Vehicle for Reducing Driving-Wheel Slippage Energy Dissipation in Cornering. Energies 2021, 14, 8143. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, J.; Chang, B.; Wang, J. Research on Anti-Skid Control Strategy for Four-Wheel Independent Drive Electric Vehicle. World Electr. Veh. J. 2021, 12, 150. [Google Scholar] [CrossRef]






| Ref. | Year | Contribution | Number of Input Fuzzy Membership Functions | Number of Output Fuzzy Membership Functions | Number of Fuzzy Rules |
|---|---|---|---|---|---|
| [6] | 2021 | An Agent-Based Model-Driven Decision Support System for Assessment of Agricultural Vulnerability of Sugarcane Facing Climatic Change: Crop yield model (Scopus-Indexed) | 8 | 5 | 768 |
| [7] | 2021 | New FMEA Risks Ranking Approach Utilizing Four Fuzzy Logic Systems (Scopus-Indexed) | 4 | 1 | 625 |
| [8] | 2021 | Symptom Analysis Using Fuzzy Logic for Detection and Monitoring of COVID-19 Patients (Scopus-Indexed) | 6 | 1 | 512 |
| [9] | 2021 | A Fuzzy Logic-Based Cost Modelling System for Recycling Carbon Fibre Reinforced Composites (Scopus-Indexed) | 5 | 1 | 243 |
| [10] | 2021 | Enhanced Intelligent Closed Loop Direct Torque and Flux Control of Induction Motor for Standalone Photovoltaic Water Pumping System (Scopus-Indexed) | 3 | 1 | 180 |
| [11] | 2021 | SAFEA application design on determining the optimal order quantity of chicken eggs based on fuzzy logic (Scopus-Indexed) | 3 | 1 | 144 |
| [12] | 2021 | A fuzzy logic-based approach for evaluating forest ecosystem service provision and biodiversity applied to a case study landscape in Southern Germany (Scopus-Indexed) | 5 | 5 | 125 |
| [13] | 2021 | A Fuzzy Logic Model for Early Warning of Algal Blooms in a Tidal-Influenced River (Scopus-Indexed) | 3 | 1 | 125 |
| [14] | 2021 | Fuzzy Logic in Aircraft Onboard Systems Reliability Evaluation: A New Approach (Scopus-Indexed) | 3 | 1 | 125 |
| [6] | 2021 | An Agent-Based Model-Driven Decision Support System for Assessment of Agricultural Vulnerability of Sugarcane Facing Climatic Change: Crop vulnerability model (Scopus-Indexed) | 5 | 3 | 120 |
| [15] | 2021 | Inverter current control for reactive power compensation in solar grid system using Self-Tune Fuzzy Logic Controller (Scopus-Indexed) | 2 | 1 | 91 |
| [16] | 2021 | A Fuzzy Logic Model for the Analysis of Ultrasonic Vibration Assisted Turning and Conventional Turning of Ti-Based Alloy (Scopus-Indexed) | 4 | 4 | 81 |
| [17] | 2021 | Fuzzy Logic Based Synchronization Method for Solar Powered High Frequency On-Board Grid (Scopus-Indexed) | 2 | 1 | 81 |
| [6] | 2021 | An Agent-Based Model-Driven Decision Support System for Assessment of Agricultural Vulnerability of Sugarcane Facing Climatic Change: Uncertain parameters model (Scopus-Indexed) | 5 | 3 | 72 |
| [6] | 2021 | An Agent-Based Model-Driven Decision Support System for Assessment of Agricultural Vulnerability of Sugarcane Facing Climatic Change: Non-nutritional disorders model (Scopus-Indexed) | 5 | 3 | 72 |
| [18] | 2021 | Prediction of gas velocity in two-phase flow using developed fuzzy logic system with differential evolution algorithm (Scopus-Indexed) | 3 | 1 | 64 |
| [19] | 2021 | Comprehensive Knowledge-Driven AI System for Air Classification Process (Scopus-Indexed) | 5 | 3 | 55 |
| [20] | 2021 | Overall fuzzy logic control strategy of direct driven PMSG wind turbine connected to grid (Scopus-Indexed) | 2 | 1 | 49 |
| [21] | 2021 | Optimal Geno-Fuzzy Lateral Control of Powered Parachute Flying Vehicles (Scopus-Indexed) | 2 | 1 | 49 |
| [22] | 2021 | Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids (Scopus-Indexed) | 2 | 1 | 49 |
| [23] | 2021 | A Novel Fuzzy PI Control Method for Variable Frequency Brushless Synchronous Generators (Scopus-Indexed) | 2 | 1 | 49 |
| [24] | 2021 | A Fuzzy Multi-Criteria Model for Municipal Waste Treatment Systems Evaluation including Energy Recovery: Workstation evaluation (Scopus-Indexed) | 2 | 1 | 49 |
| [24] | 2021 | A Fuzzy Multi-Criteria Model for Municipal Waste Treatment Systems Evaluation including Energy Recovery: Treatment system evaluation (Scopus-Indexed) | 4 | 1 | 49 |
| [25] | 2021 | A Temperature Control Method for Micro-accelerometer Chips Based on Genetic Algorithm and Fuzzy PID Control (Scopus-Indexed) | 2 | 1 | 49 |
| [26] | 2022 | Induction Motor DTC Performance Improvement by Inserting Fuzzy Logic Controllers and Twelve-Sector Neural Network Switching Table (Scopus-Indexed) | 7 | 7 | 49 |
| [27] | 2022 | Fuzzy Hysteresis Current Controller for Power Quality Enhancement in Renewable Energy Integrated Clusters (Scopus-Indexed) | 7 | 7 | 49 |
| [28] | 2021 | Fuzzy Logic-Based Controller for Bipedal Robot (Scopus-Indexed) | 2 | 1 | 30 |
| [29] | 2021 | A Swarm Intelligence Graph-Based Pathfinding Algorithm Based on Fuzzy Logic (SIGPAF): A Case Study on Unmanned Surface Vehicle Multi-Objective Path Planning (Scopus-Indexed) | 3 | 1 | 27 |
| [30] | 2021 | Fuzzy Logic and Modified Butterfly Optimization with Efficient Fault Detection and Recovery Mechanisms for Secured Fault-Tolerant Routing in Wireless Sensor Networks (Scopus-Indexed) | 3 | 1 | 27 |
| [31] | 2021 | Optimal Routing Protocol for Wireless Sensor Network Using Genetic Fuzzy Logic System (Scopus-Indexed) | 3 | 1 | 27 |
| [32] | 2021 | GPS Data Correction Based on Fuzzy Logic for Tracking Land Vehicles: Fuzzy system 1 (Scopus-Indexed) | 2 | 1 | 25 |
| [33] | 2021 | Lifting and stabilizing of two-wheeled wheelchair system using interval type-2 fuzzy logic control based spiral dynamic algorithm (Scopus-Indexed) | 2 | 1 | 25 |
| [34] | 2021 | Optimization of Fuzzy Logic Based Virtual Pilot for Wargaming (Scopus-Indexed) | 2 | 1 | 25 |
| [35] | 2021 | LQR and Fuzzy Logic Control for the Three-Area Power System (Scopus-Indexed) | 5 | 5 | 25 |
| [36] | 2021 | Smart Homes as Enablers for Depression Pre-Diagnosis Using PHQ-9 on HMI through Fuzzy Logic Decision System (Scopus-Indexed) | 2 | 1 | 20 |
| [37] | 2021 | Pineapple maturity classifier using image processing and fuzzy logic (Scopus-Indexed) | 3 | 1 | 18 |
| [38] | 2021 | Algorithm for Preventing the Spread of COVID-19 in Airports and Air Routes by Applying Fuzzy Logic and a Markov Chain (Scopus-Indexed) | 4 | 1 | 14 |
| [39] | 2021 | Artificial Intelligence Search Strategies for Autonomous Underwater Vehicles Applied for Submarine Groundwater Discharge Site Investigation (Scopus-Indexed) | 3 | 2 | 13 |
| [40] | 2021 | Intelligent Fault Detection and Identification Approach for Analog Electronic Circuits Based on Fuzzy Logic Classifier (Scopus-Indexed) | 3 | 1 | 12 |
| [32] | 2021 | GPS Data Correction Based on Fuzzy Logic for Tracking Land Vehicles: Fuzzy system 2 (Scopus-Indexed) | 2 | 1 | 9 |
| [41] | 2021 | Optimum Design of a Composite Optical Receiver by Taguchi and Fuzzy Logic Methods (Scopus-Indexed) | 3 | 1 | 9 |
| [42] | 2022 | SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid (Scopus-Indexed) | 3 | 3 | 9 |
| [43] | 2021 | Fuzzy Logic in Selection of Maritime Search and Rescue Units (Scopus-Indexed) | 2 | 1 | 6 |
| Error (Ek) | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| Rate of Change of Error (dEk) | NB | PB | PB | PB | PS | PS | PS | ZE |
| NM | PB | PM | PM | PS | PS | ZE | NS | |
| NS | PB | PM | PS | ZE | ZE | NS | NS | |
| ZE | PM | PS | ZE | ZE | ZE | NS | NS | |
| PS | PM | PS | ZE | ZE | NS | NS | NM | |
| PM | PS | PS | NS | NS | NS | NS | NM | |
| PB | ZE | NS | NS | NM | NB | NB | NB | |
| Ci (Optimized Peak Value or the Center Value) | j | σi (Optimized Standard Deviation) | j |
|---|---|---|---|
| 1 | 2 | ||
| 3 | 4 | ||
| 5 | 6 | ||
| 7 | 8 | ||
| 9 | 10 | ||
| 11 | 12 | ||
| 13 | 14 |
| Optimized Gain Factors for the Input Variable Ek (Error) | ||
|---|---|---|
| ci (Optimized Peak Value) | σi (Optimized Standard Deviation or the Width of the Curve) | Membership Function (MF) |
| NB | ||
| NM | ||
| NS | ||
| Z | ||
| PS | ||
| PM | ||
| PB | ||
| Optimized Gain Factors for the Input Variable dEk (Error) | ||
|---|---|---|
| ci (Optimized Peak Value) | σi (Optimized Standard Deviation or the Width of the Curve) | Membership Function (MF) |
| NB | ||
| NM | ||
| NS | ||
| Z | ||
| PS | ||
| PM | ||
| PB | ||
| Optimized Gain Factors for the Input Variable Uk (Error) | ||
|---|---|---|
| ci (Optimized Peak Value) | σi (Optimized Standard Deviation or the Width of the Curve) | Membership Function (MF) |
| NB | ||
| NM | ||
| NS | ||
| Z | ||
| PS | ||
| PM | ||
| PB | ||
| Linguistic Variables | |||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| Rounded decimal value in Axis 18, 19 and 20. | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Fuzzy variables | : | |||
| Decimal representation | : | 3 | 5 | 6 |
| Corresponding fuzzy rule | : | is PM | ||
| TSK-FL Controller Outputs | ||||||
|---|---|---|---|---|---|---|
| Linguistic Variables | nPop | |||||
| PVS | 5 | 0.800 | 0.100 | 0.975 | 0.975 | None |
| PS | 10 | 0.825 | 0.300 | 0.985 | 0.985 | 0.009 |
| PM | 15 | 0.875 | 0.400 | 0.995 | 0.995 | None |
| PB | 20 | 0.900 | 0.500 | 1.000 | 1.000 | None |
| No. | Inputs | Outputs | ||||||
|---|---|---|---|---|---|---|---|---|
| Ek | dEk | nPop | ωmax | ωmin | a1 | a2 | af | |
| 01 | PVS | PVS | PS | PM | PM | PM | PM | None |
| 02 | PS | PVS | PS | PM | PM | PM | PM | None |
| 03 | PM | PVS | PM | PB | PM | PM | PM | None |
| 04 | PB | PVS | PB | PB | PB | PB | PB | PS |
| 05 | PVS | PS | PS | PM | PM | PS | PS | None |
| 06 | PS | PS | PM | PM | PM | PM | PM | None |
| 07 | PM | PS | PM | PB | PB | PM | PM | None |
| 08 | PB | PS | PB | PB | PB | PB | PB | PS |
| 09 | PVS | PM | PM | PM | PM | PM | PM | None |
| 10 | PS | PM | PM | PB | PM | PM | PM | None |
| 11 | PM | PM | PM | PB | PB | PM | PM | None |
| 12 | PB | PM | PB | PB | PB | PB | PB | PS |
| 13 | PVS | PB | PM | PM | PM | PM | PM | None |
| 14 | PS | PB | PM | PB | PB | PM | PM | None |
| 15 | PM | PB | PB | PB | PB | PM | PM | None |
| 16 | PB | PB | PB | PB | PB | PB | PB | PS |
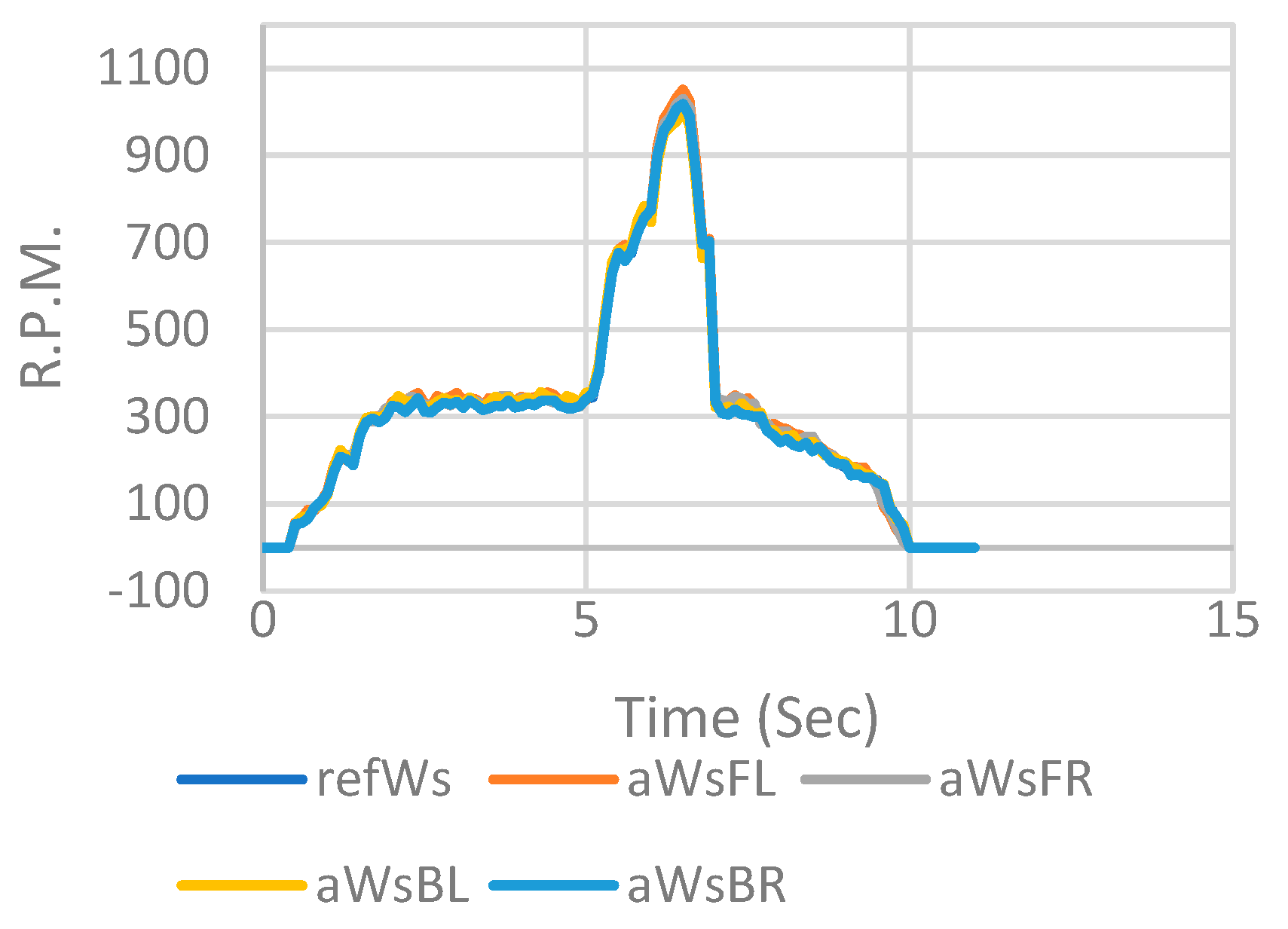
| Wheel of the Rover | Steady-State Error (Ess) (r.p.m.) | Steady-State Error % (Ess%) (r.p.m.) |
|---|---|---|
| Front-Left (FL) | 58.16 | 5.24 |
| Front-Right (FR) | 68.81 | 6.27 |
| Back-Left (BL) | −28.65 | −2.95 |
| Back-Right (BR) | −51.82 | −5.36 |
| Reference | Similar Research Works Recently Published | Compared Parameter(s) | Advantages of the Proposed Metaheuristic FLC System | Established Mechanism to Verify the Control Strategy | ||||
|---|---|---|---|---|---|---|---|---|
| Research Title and the Published Year | Control Strategy | The Controlled Physical Phenomenon | Controlled Parameter(s) of the Research Work | Controlled Parameter(s) of the Proposed Metaheuristic FLC | The Mechanism Used in the Research Work | The Mechanism Used in the Proposed Metaheuristic FLC | ||
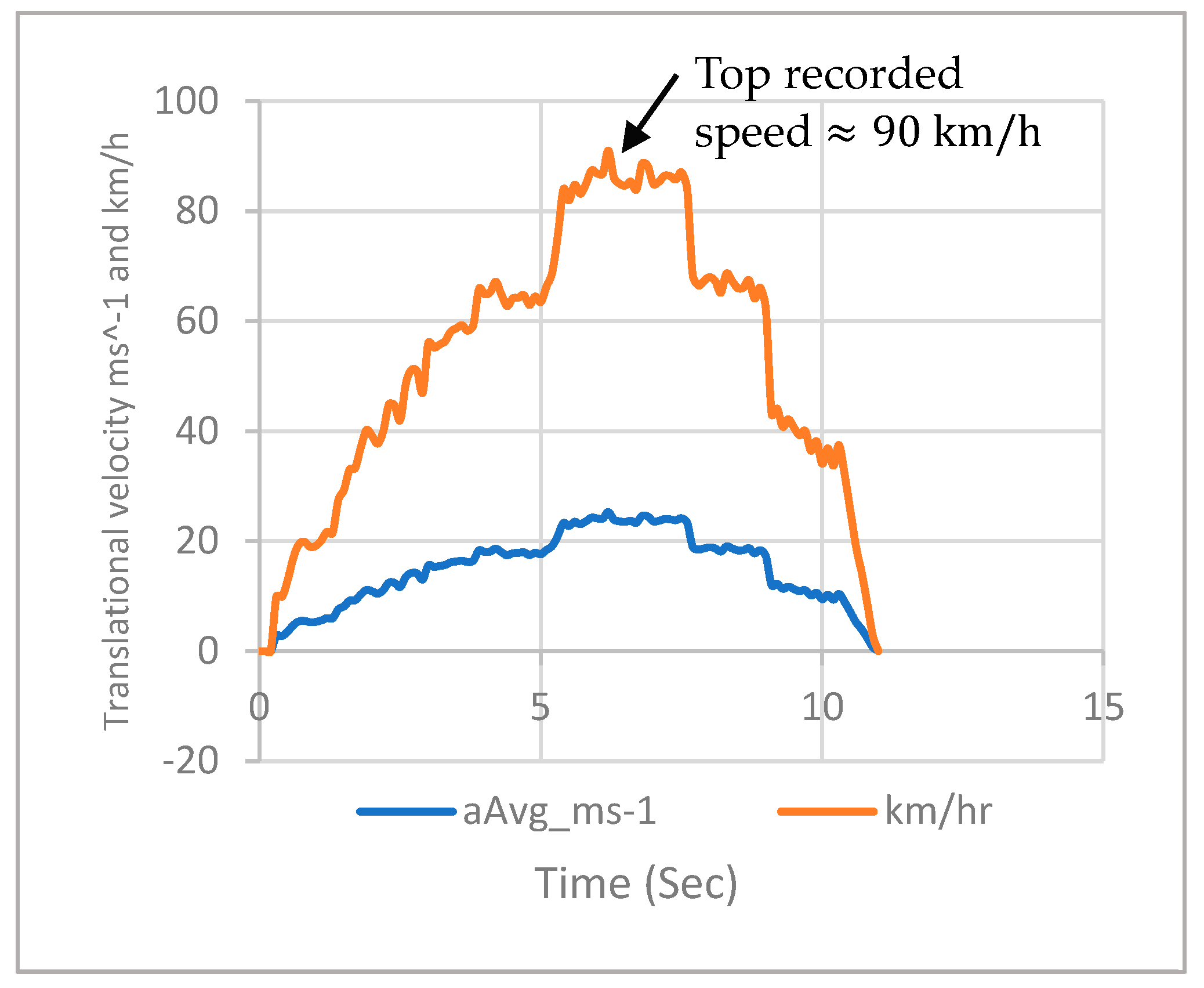
| [111] | Research on Torque Distribution of Four-Wheel Independent Drive Off-Road Vehicle Based on PRLS Road Slope Estimation. 2021. | PRLS Road Slope Estimation. | Wheel slip and orientation of the vehicle. | Wheel torque distribution. The maximum translational velocity was tested at around 25 km/h. The average wheel slip of all four wheels was 0.8 The maximum wheel torque was achieved at 2.4 kN·m | The angular speed of each wheel. The angular torque of each wheel. The desired orientation of the rover under high-speed conditions (sudden acceleration and deceleration). The rover had lateral stability, longitudinal stability and radial stability under high-speed conditions. The top recorded translational speed of the rover was approximately 90 km/h. The maximum translational (longitudinal) acceleration on wet grass slippery surface () was 3.4 . The recorded wheel slip of the rover was less than 0.35. | The proposed metaheuristic FLC is independent of mathematical governing equation(s). | Hardware-in-the-loop real-time simulation and real vehicle tests. | The proposed dynamic metaheuristic FLC was tested via a four-wheel independent-drive electric rover model. Figure A9 and Figure A10. |
| [112] | Adaptive Fuzzy Type-II Controller for Wheeled Mobile Robot with Disturbances and Wheel slips. 2021. | Adaptive Fuzzy Type-II Control mechanism. | Wheel slip and trajectory follower. | Wheel torque distribution. The maximum recorded translational velocity was around 12.4 m/s. | As the authors stated: “the control scheme is the complication in the mathematic proof”. The proposed metaheuristic FLC system is independent of the system-governing equation(s). | Simulation setup. The authors have done a simulation with two types of reference trajectory: elliptical and Trifolium shapes. | ||
| [113] | Control for four-wheel independently driven electric vehicles to improve steering performance using . and Moore–Penrose theory. 2019. | H_∞ and Moore–Penrose theory. In this case, the authors developed a “logarithmic functional relationship between wheel cornering stiffness”. | Wheel slip and orientation (yaw moment) of the vehicle. | Regulated the wheel cornering stiffness. Controlled the yaw moment of the 4WID EV. | As the authors stated, the “decrease of adhesive force caused by the wear of the tyre could change the vehicle’s dynamic property, and the design of a more robust controller adjusting to a varying vehicle system would bring some new challenges”. This issue is not a problem for the proposed metaheuristic FLC because it is independent of the system-governing equation(s)/(mathematical model) | A simulation test setup has been established for the following three cornering stiffness () categories. Category 1: If Category 2: If Category 3: If | ||
| [114] | A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. 2021. | Torque distribution control. | Vehicle stability and handling performance, especially under extreme driving conditions. | Wheel torque distribution. Torque control was considered to achieve the desired yaw moment of the 4WIDEV. As the authors stated, they made “quicker and fuller use of lateral force to generate yaw moment and gained better vehicle stability”. | In this similar research work, an “ideal motion state estimator” was developed. However, when the mathematical model needed to become more realistic, all system information needed to be captured. The proposed FLC was tested in real-time through a hardware application (4WDI ER) and compared to similar research work. | HIL simulation has been utilized by the authors to verify the effectiveness of the proposed optimal torque distribution approach (two approaches have been considered). Approach 1: Sine with Dwell: The initial speed was set to 80 km/h. The friction coefficient was 0.8. Approach 2: Double Lane Change Closed-loop simulations have been conducted at a constant speed of 60 km/h. The friction coefficient was 0.8. | ||
| [115] | A new application for fast prediction and protection of electrical drive wheel speed using machine learning methodology. 2022. | Artificial neural network (ANN) coupled with particle swarm optimization (ANN-PSO). | Steering angle and steering ahead are achieved via an electronic differential control. | Angular velocity and wheel slip. The longitudinal forces, lateral forces and radial forces. The maximum recorded translational velocity was around 80 km/h. The maximum wheel torque was 138 N·m (total wheel torque) | In this similar research work to stabilize a vehicle under uncertain conditions, the wheel speed or torque have to be regulated. Therefore, to achieve the desired electric current or voltage of the permanent magnet synchronize motor (PMSM), Lyapunov’s stability analysis theory is taken into consideration. The proposed metaheuristic FLC is independent of non-linear mathematical (Lyapunov’s, etc.) models. | The electric rear-wheel-drive PMSM speed regulation is simulated using the DTFC command. | ||
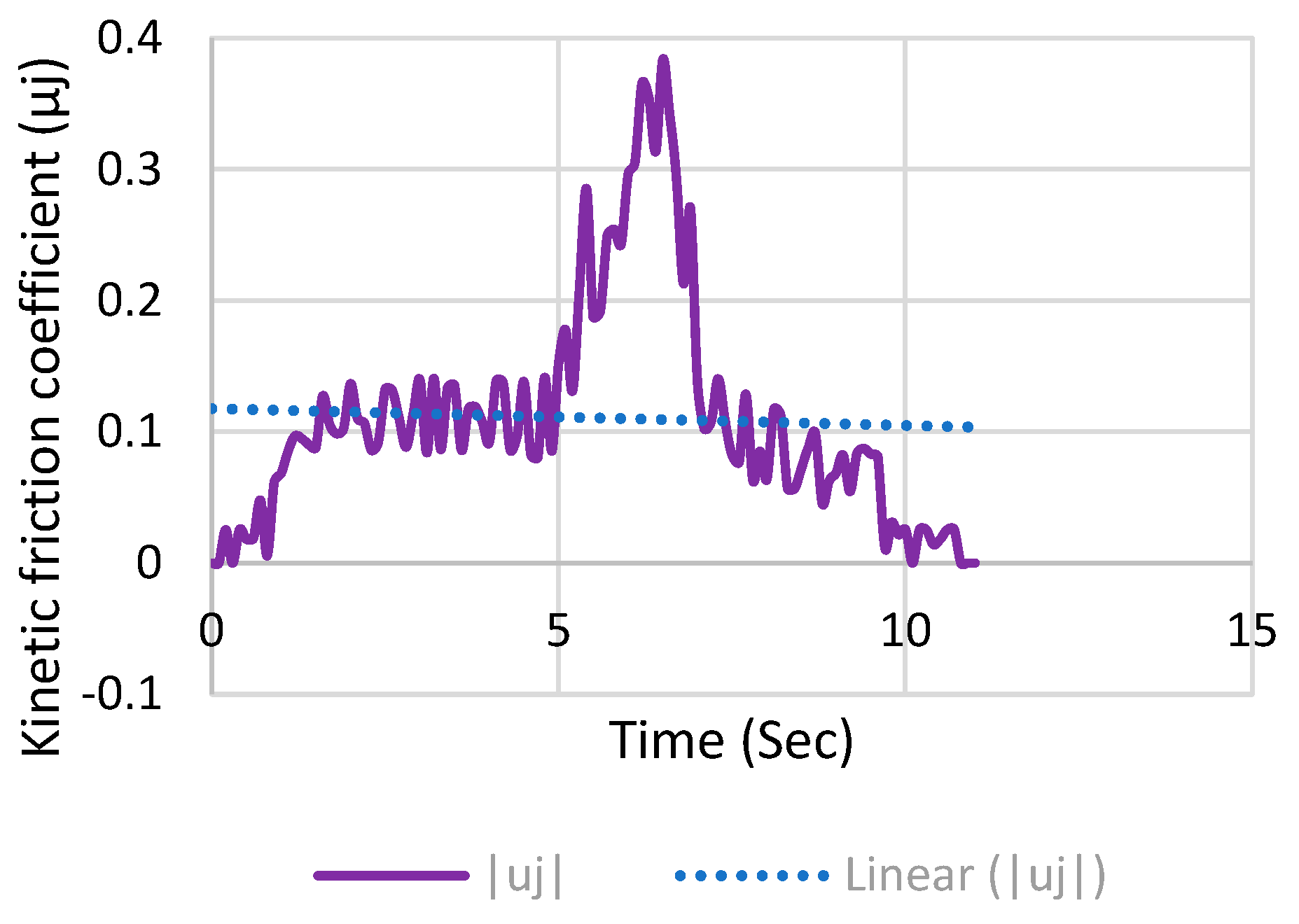
| [116] | A Novel Longitudinal Speed Estimator for Four-Wheel Slip in Snowy Conditions. 2021. | Longitudinal vehicle speed estimator based on fuzzy logic control. | Wheel angular velocity/torque and wheel slip. | Angular velocity and wheel slip. The translational velocity of the vehicle. Longitudinal acceleration of the vehicle. | The authors stated in similar research work that “the estimated result is not accurate in high-slip conditions”. However, when considering the proposed FLC mechanism, the observed test results show that the controller performed at an admirable level. The maximum translational speed of the rover is approximately 90 km/h, while synchronizing the all-wheel speed to achieve a fixed orientation. The average kinetic friction coefficient is around 0.1. Therefore, the proposed FLC has the ability to perform well under high wheel slip conditions. | Experimental and simulation tests have been carried out. Three driving condition cases have been taken into consideration. 1st Case: No wheel Slip. 2nd Case: At least one-wheel slips. 3rd Case: All four wheels slip. | ||
| [117] | Torque Vectoring Control of RWID Electric Vehicle for Reducing Driving-Wheel Slippage Energy Dissipation in Cornering. 2021. | Vector control mechanism. | Wheel angular velocity/torque and wheel slip. | Longitudinal linear stiffness of each driving wheel. The initial differential torque. Tire slippage energy dissipation. Acceleration slip regulation (ASR). | Simulations of typical maneuvering have been considered. | |||
| [118] | Research on Anti-Skid Control Strategy for Four-Wheel Independent Drive Electric Vehicle, 2021. | Fuzzy PID Control strategy (Artificial Intelligence and classical control-based control strategy). | Anti-skid control. Wheel slip rate in real time. | Angular velocity and wheel slip. The maximum electric vehicle driving translational velocity was around 10 km/h. The driving torque of each independent driving wheel was 500 N·m. | The authors stated that “he entire road surface identification process is in line with the assumptions”. The proposed FLC has the ability to compensate for unexpected disturbances. | Based on Carsim and MATLAB/Simulink, the vehicle dynamics model, tire model and driving anti-skid control simulation model(s) have been established. | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jayetileke, H.R.; de Mel, W.R.; Mukhopadhyay, S.C. Real-Time Metaheuristic Algorithm for Dynamic Fuzzification, De-Fuzzification and Fuzzy Reasoning Processes. Appl. Sci. 2022, 12, 8242. https://doi.org/10.3390/app12168242
Jayetileke HR, de Mel WR, Mukhopadhyay SC. Real-Time Metaheuristic Algorithm for Dynamic Fuzzification, De-Fuzzification and Fuzzy Reasoning Processes. Applied Sciences. 2022; 12(16):8242. https://doi.org/10.3390/app12168242
Chicago/Turabian StyleJayetileke, Hasitha R., W. R. de Mel, and Subhas Chandra Mukhopadhyay. 2022. "Real-Time Metaheuristic Algorithm for Dynamic Fuzzification, De-Fuzzification and Fuzzy Reasoning Processes" Applied Sciences 12, no. 16: 8242. https://doi.org/10.3390/app12168242
APA StyleJayetileke, H. R., de Mel, W. R., & Mukhopadhyay, S. C. (2022). Real-Time Metaheuristic Algorithm for Dynamic Fuzzification, De-Fuzzification and Fuzzy Reasoning Processes. Applied Sciences, 12(16), 8242. https://doi.org/10.3390/app12168242