
A GIS Partial Discharge Defect Identification Method Based on YOLOv5



Abstract
:1. Introduction
2. Acquisition of Partial Discharge Datasets
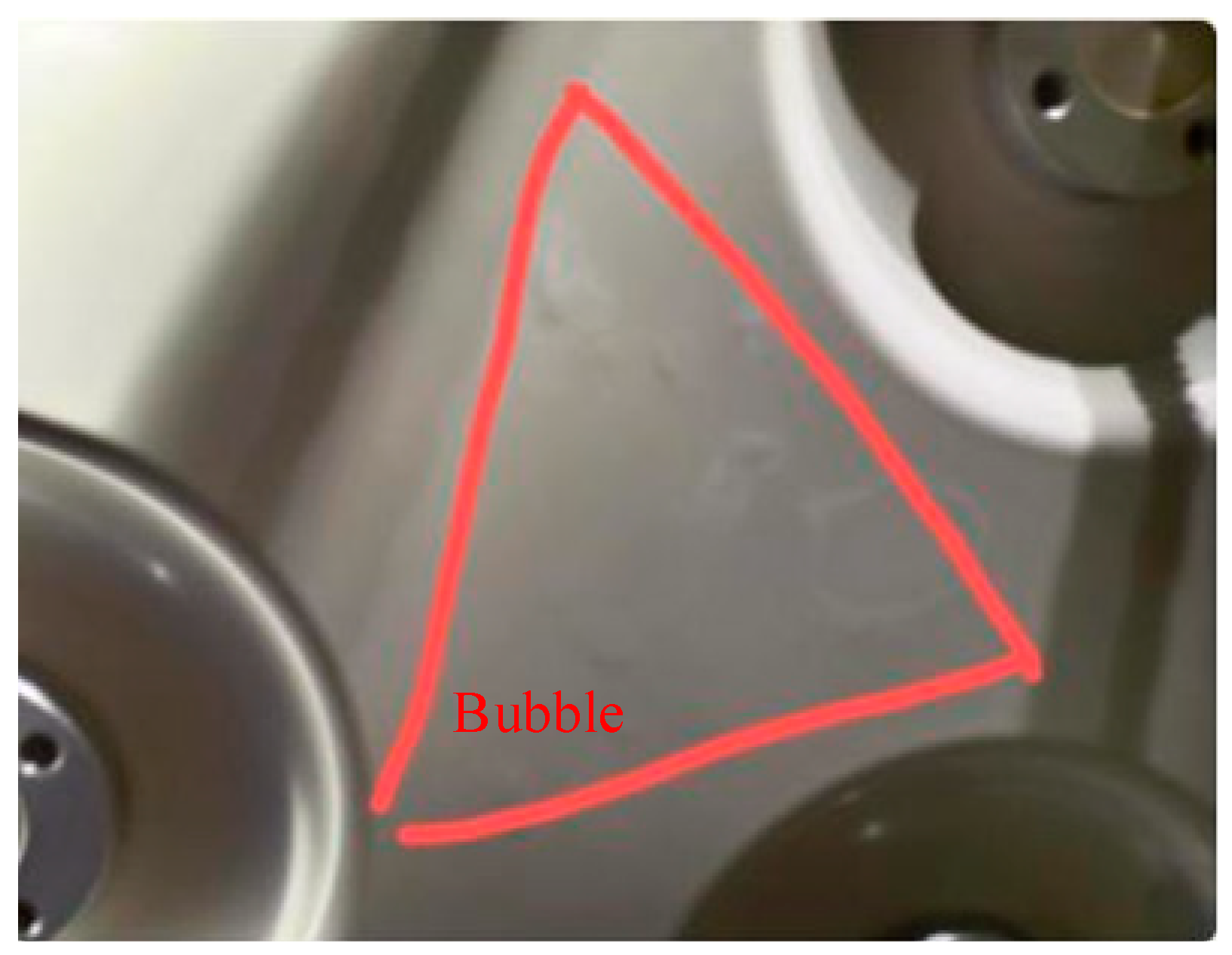
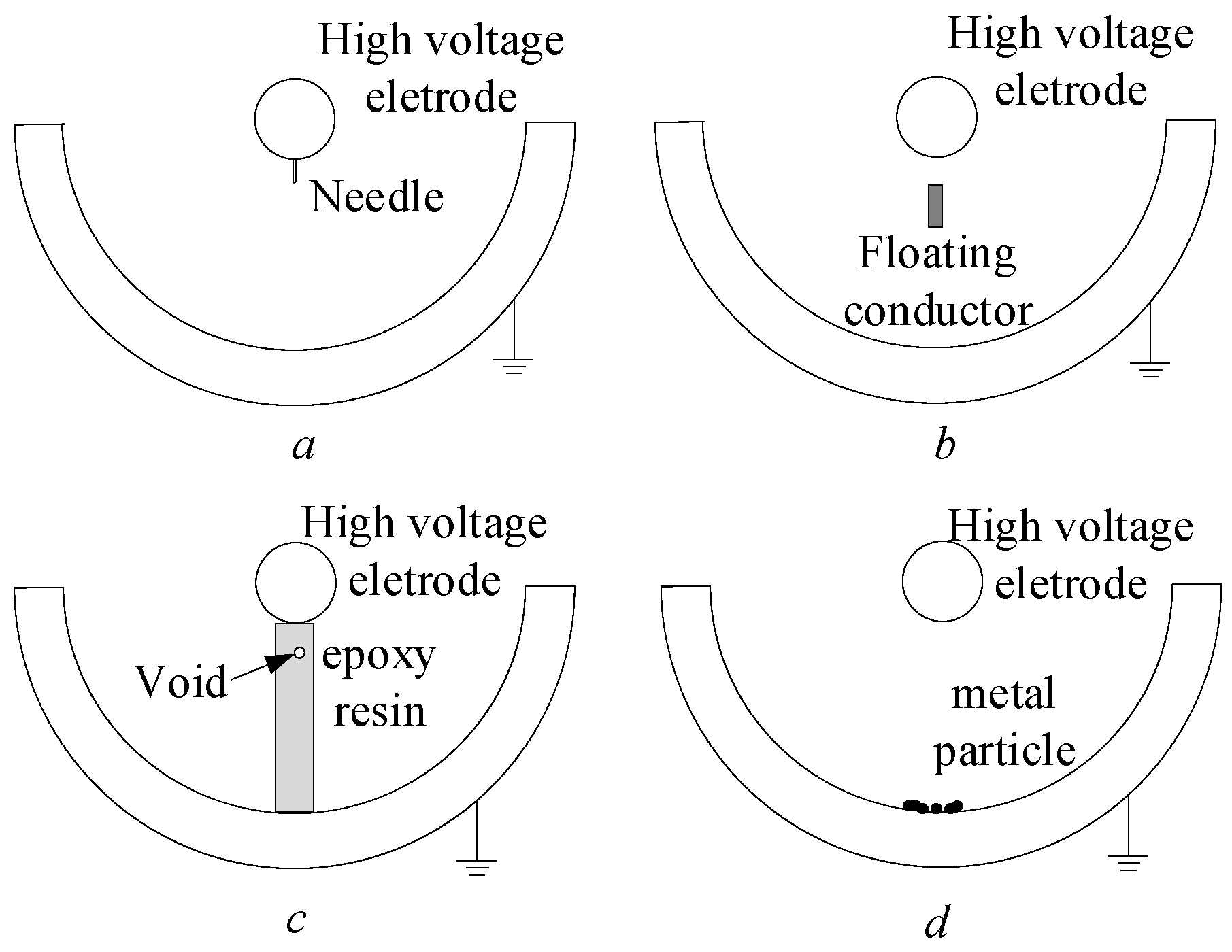
2.1. Partial Discharge Defect Model
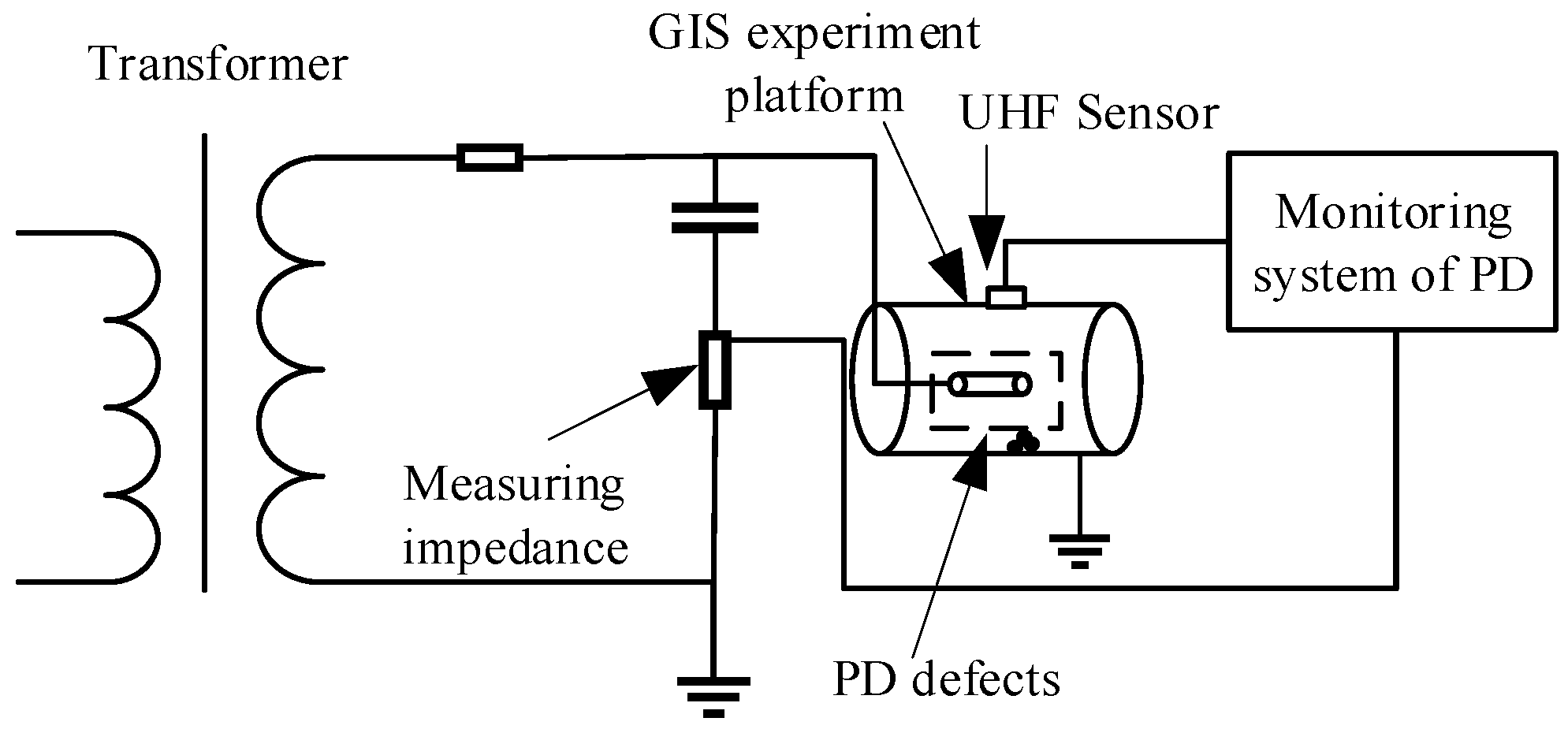
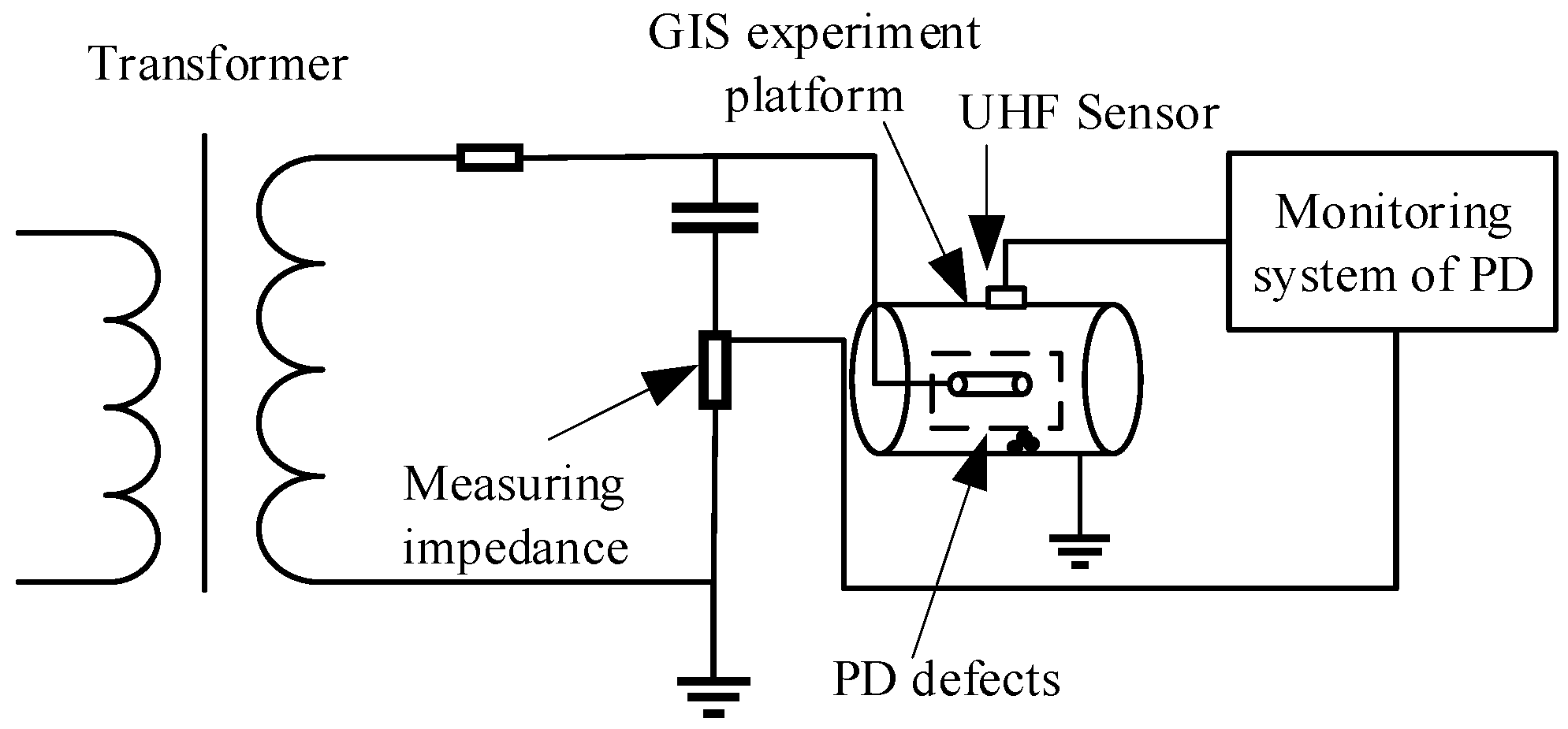
2.2. Partial Discharge Detection Platform and Pressurization Method
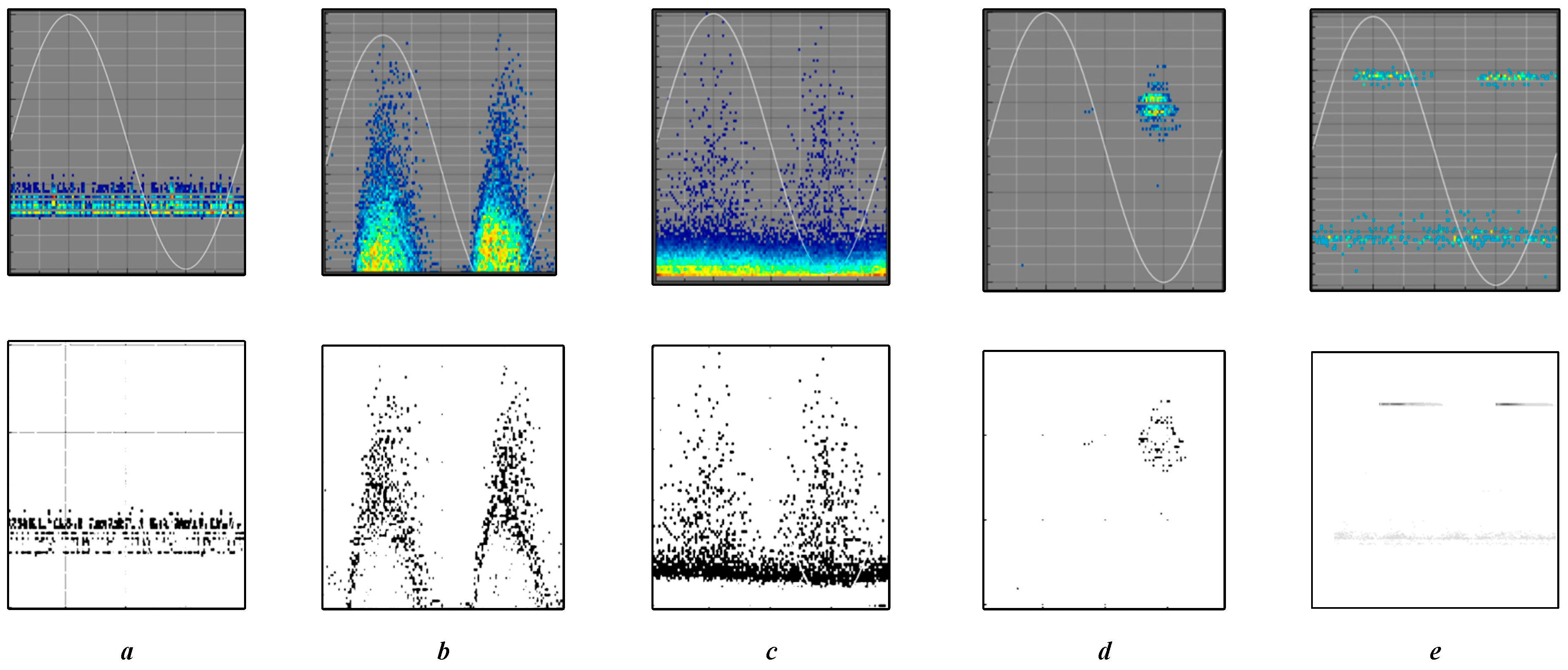
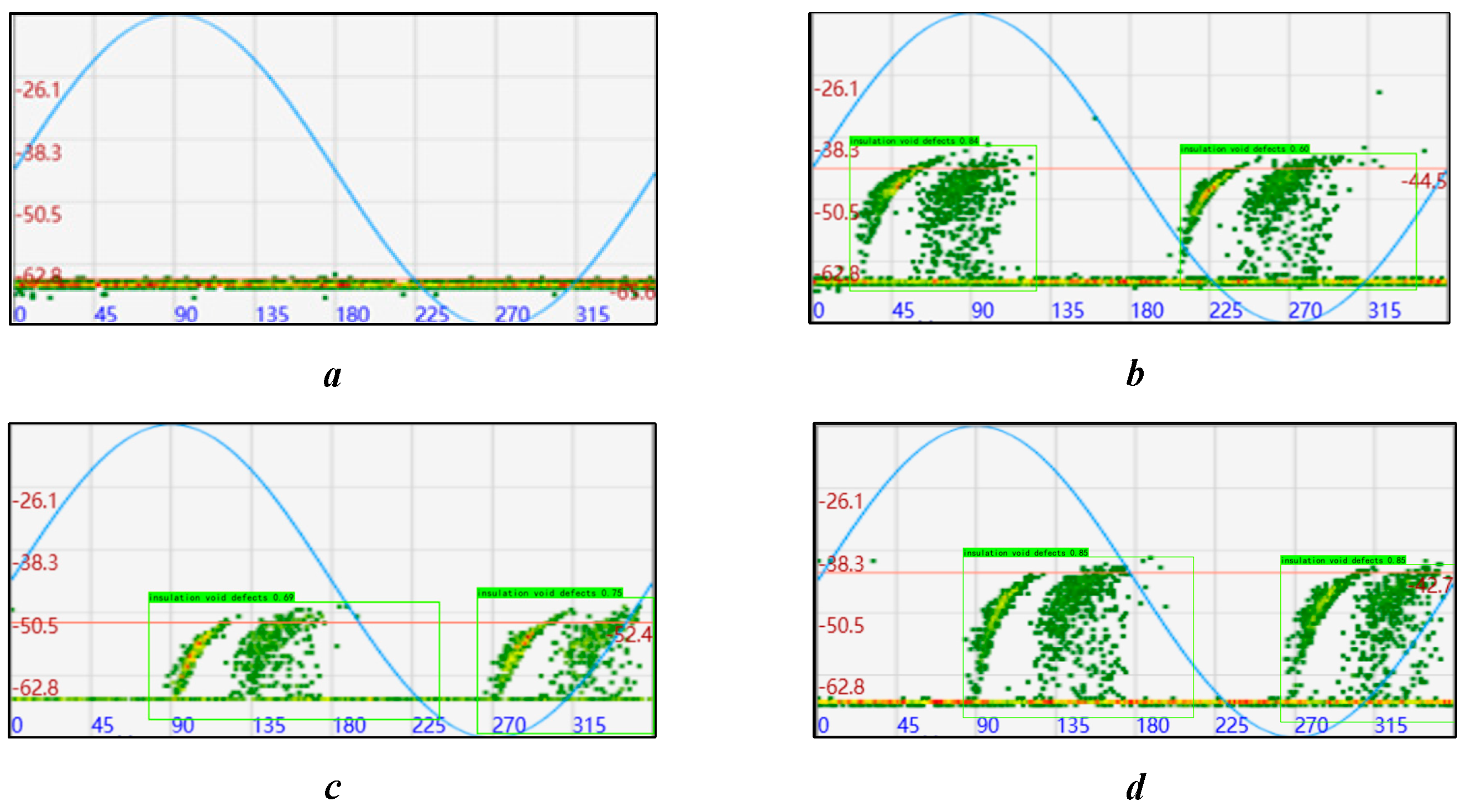
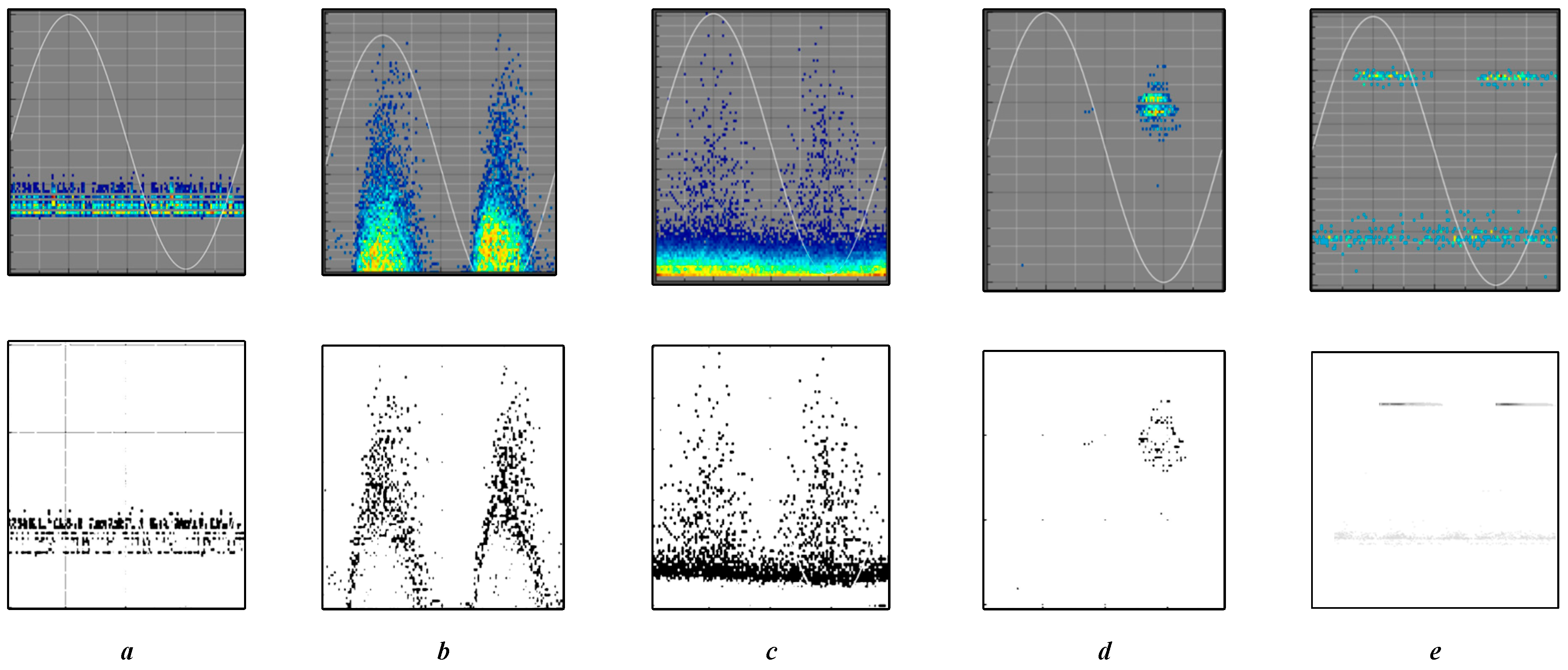
2.3. Partial Discharge MAP
3. GIS Defect PD Pattern Recognition Based on YOLOv5 Algorithm
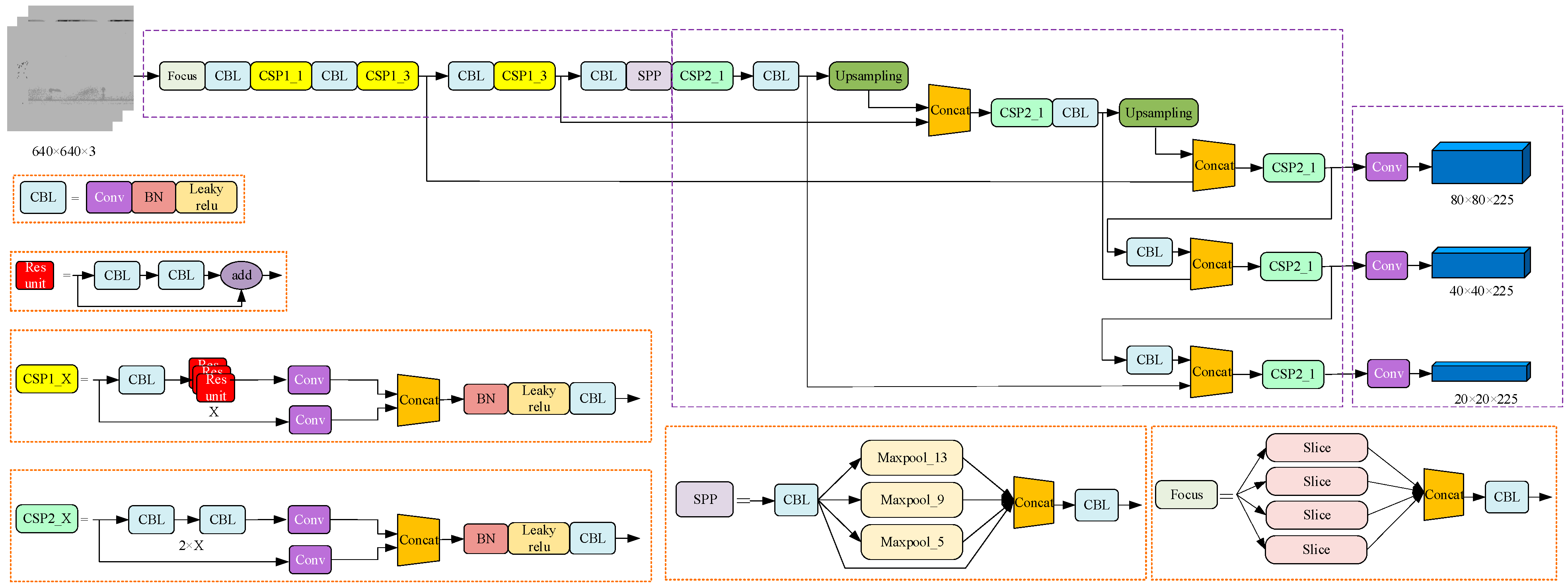
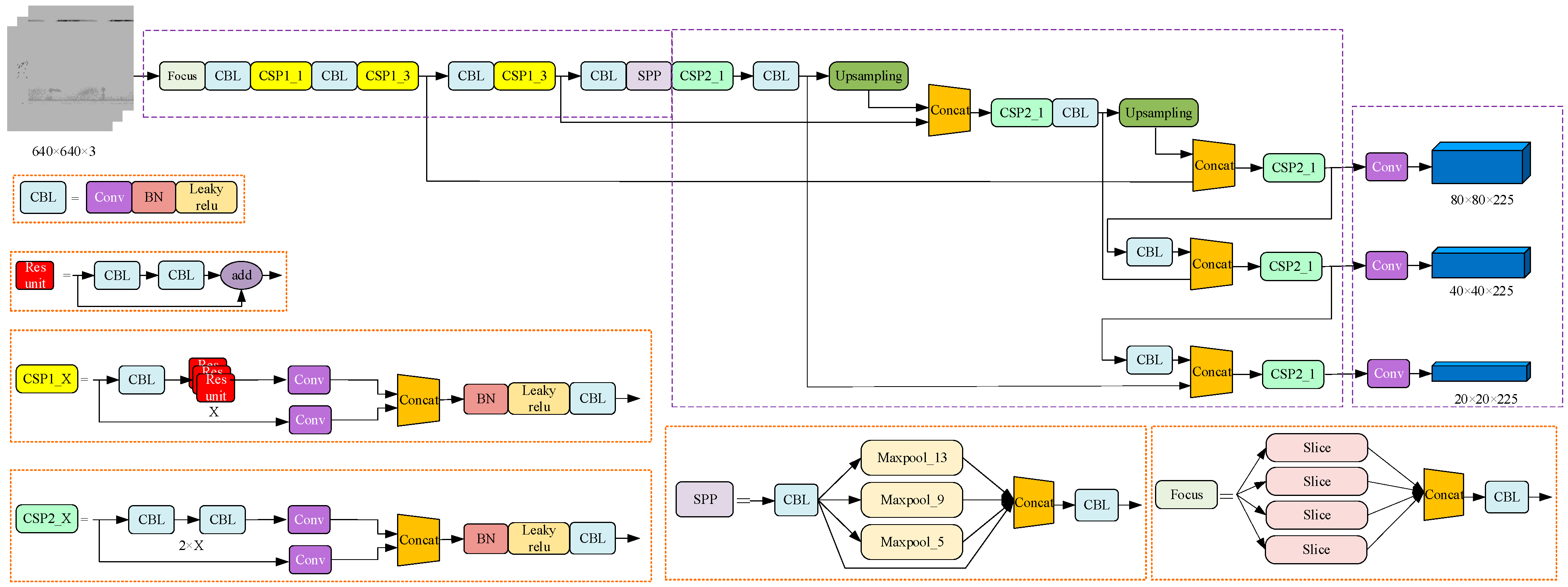
3.1. YOLOv5 Detection Algorithm
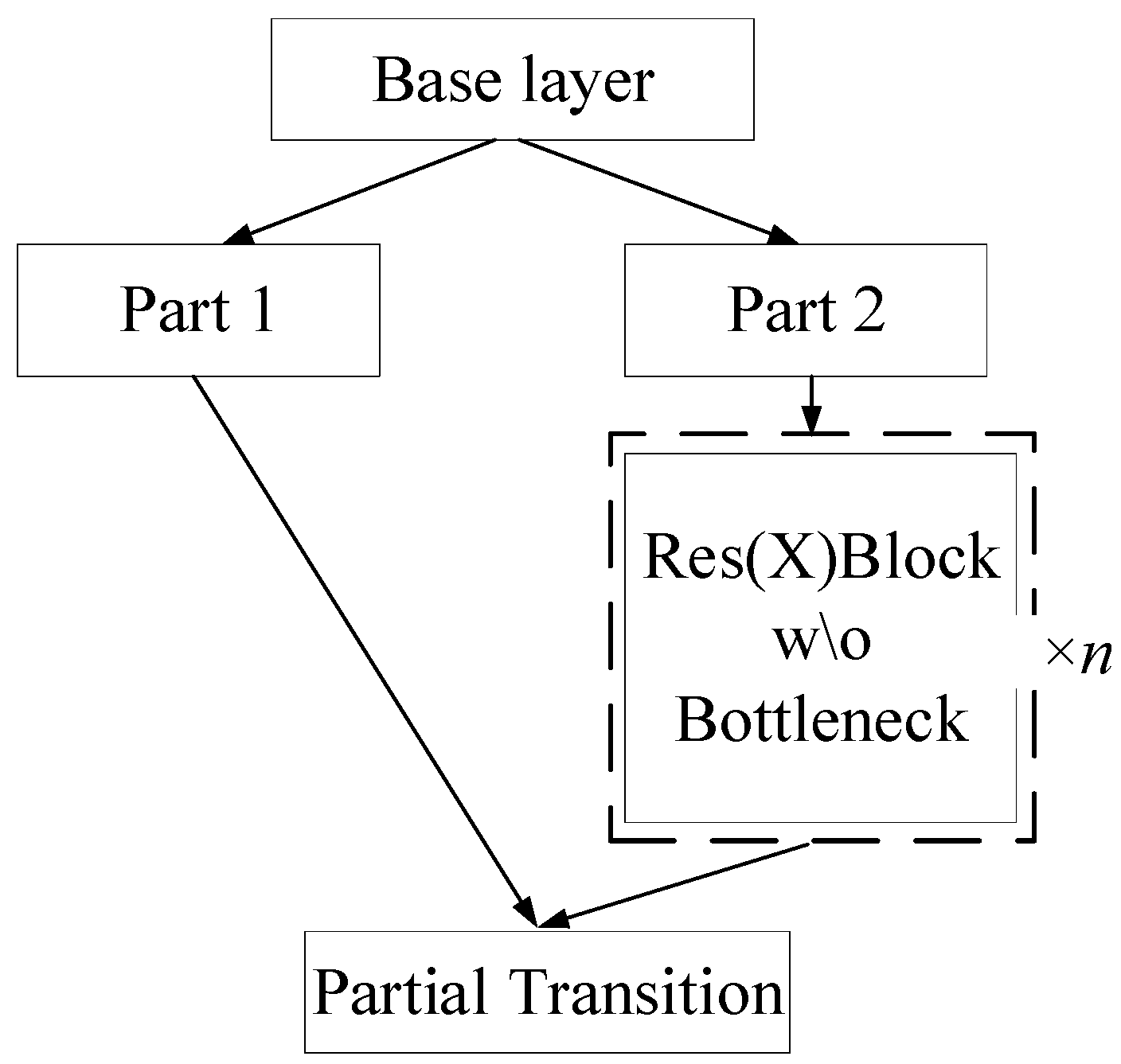
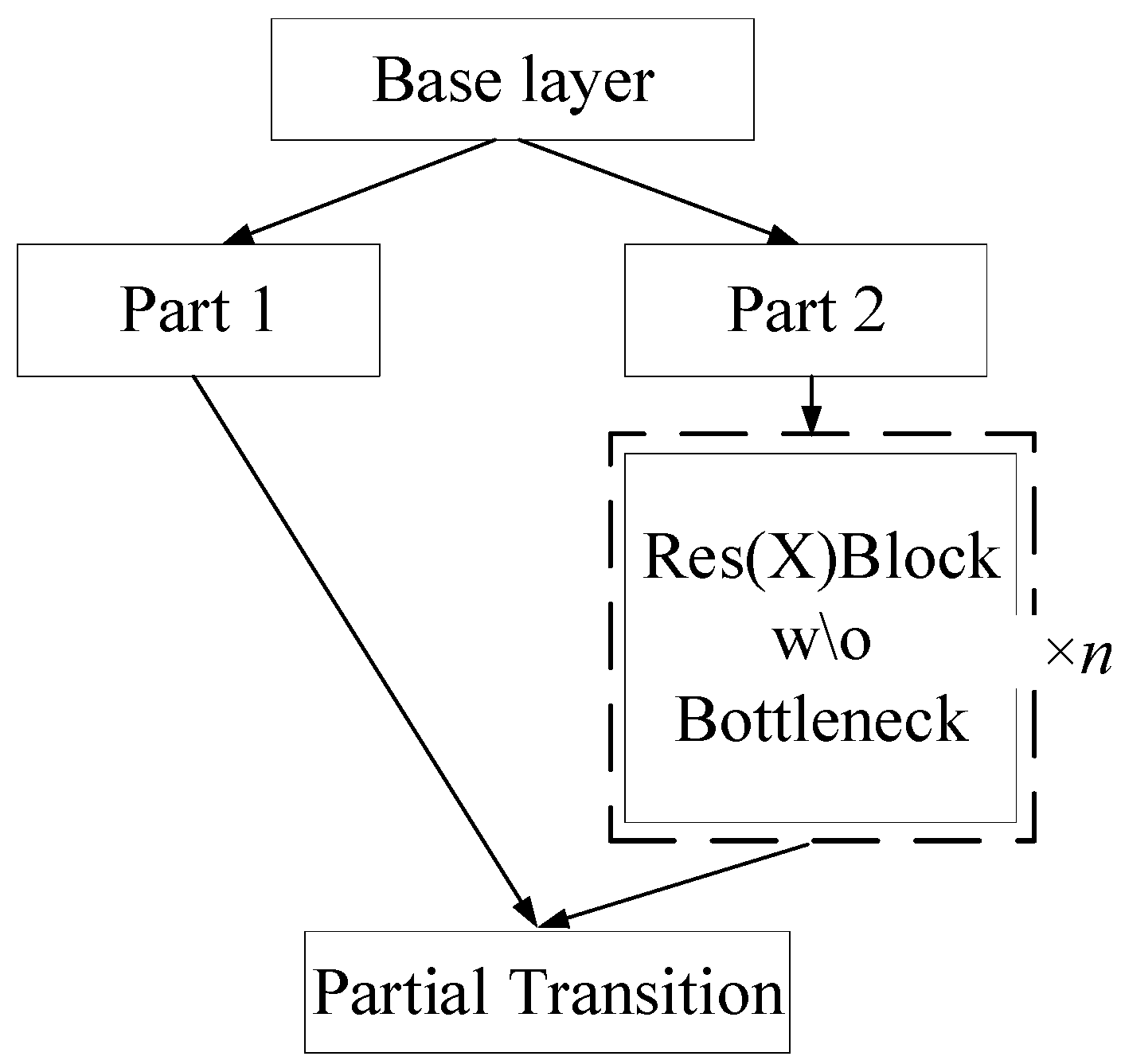
3.1.1. Backbone Feature Extraction Network
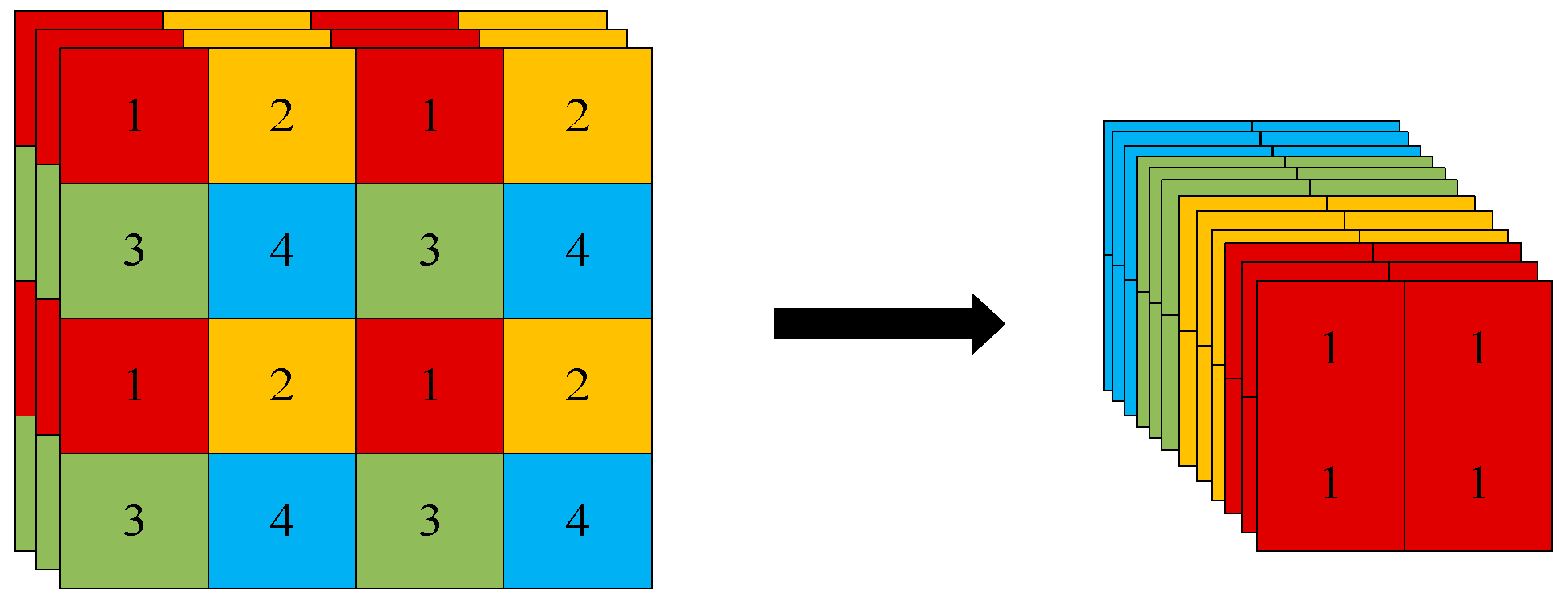
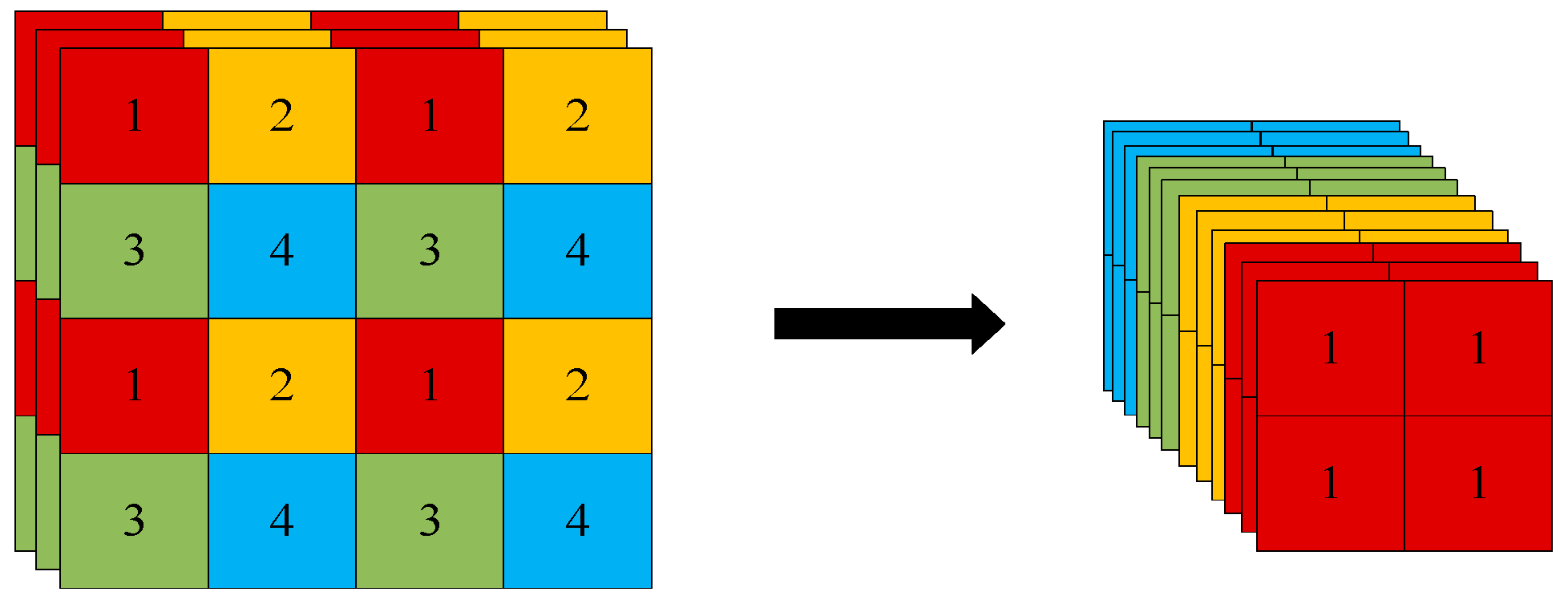
3.1.2. Focus Network Structure
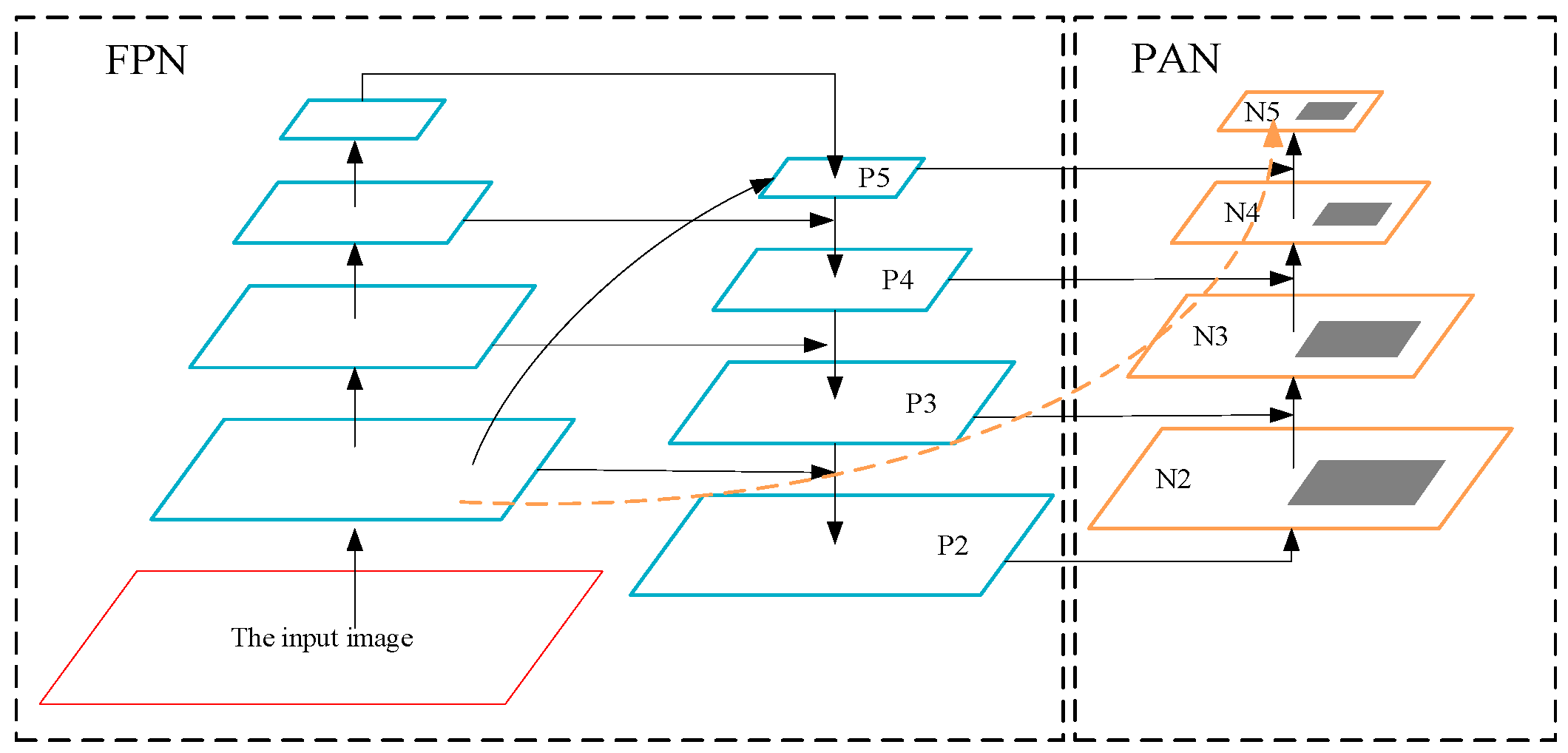
3.1.3. SPP Module and PANet Network Structure
3.1.4. Activation Function and Loss Function
3.1.5. Prediction Network
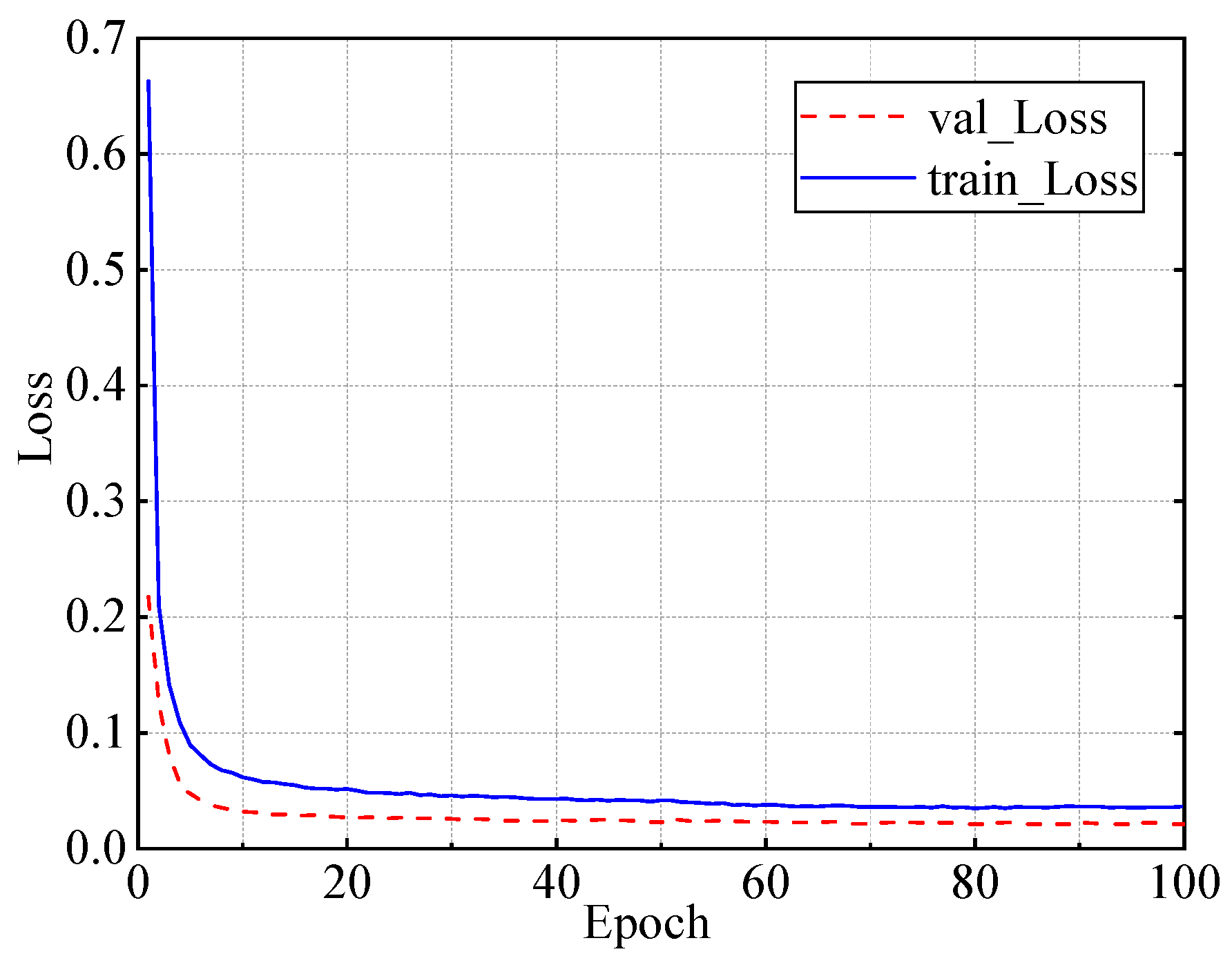
3.2. Model Training Method
3.3. Model Performance Metrics
4. GIS Partial Discharge Defect Detection Algorithm
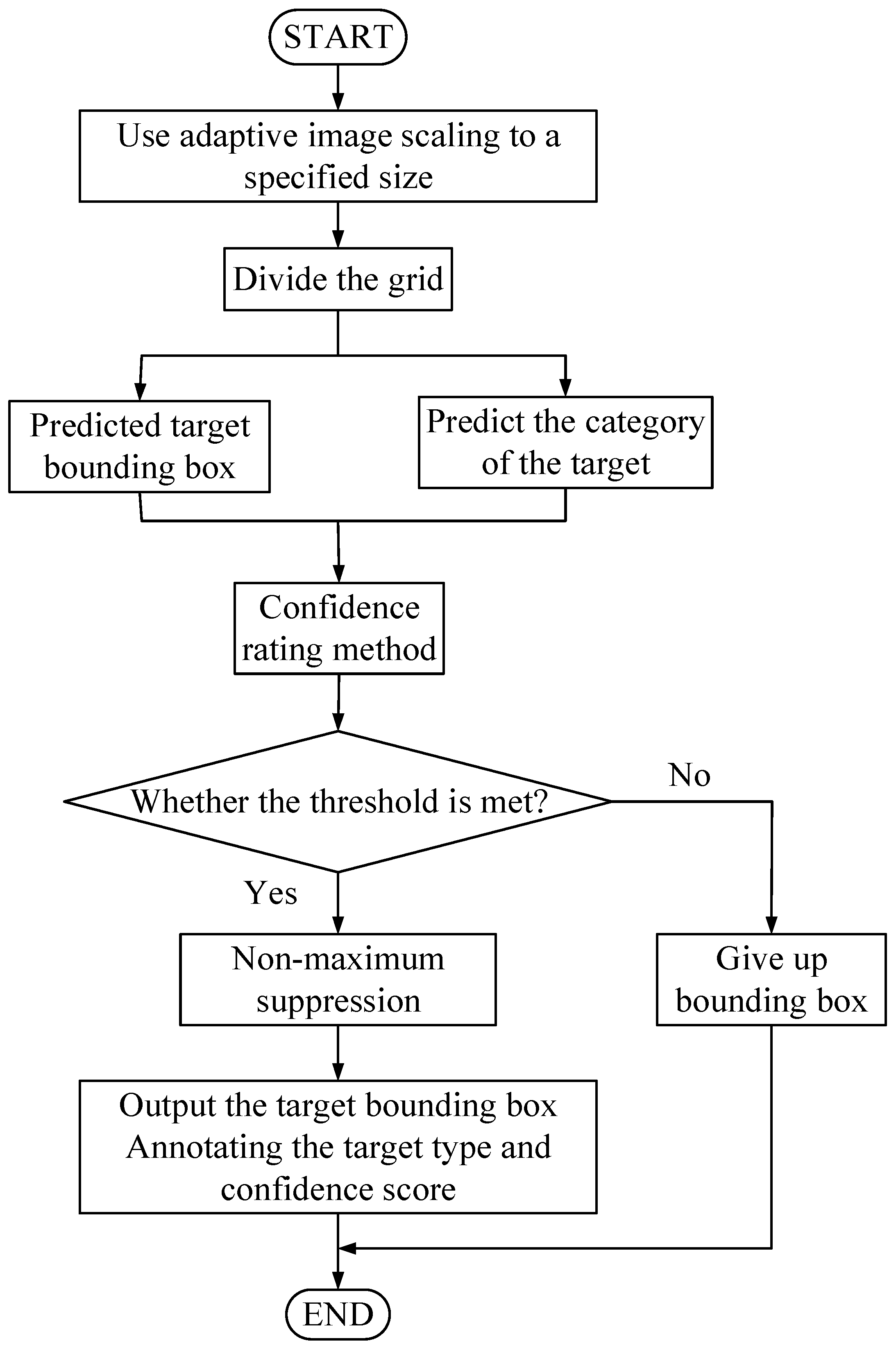
4.1. YOLOv5 Detection Process
- (1)
- GIS partial discharge PRPD map is normalized to the prescribed input size of 640 × 640 using adaptive images and input to a target detection network for image feature extraction.
- (2)
- The target detection image has meshed, the target border and the classification to which the target belongs are predicted, and then whether the specified threshold value is met is judged according to the confidence score ranking.
- (3)
- The predicted edges that meet the specified threshold are retained, and the boundary edges generated by the detection are filtered using non-maximum suppression to eliminate redundant edges.
- (4)
- After eliminating all the redundant borders and marking out all the bounding boxes, output the target bounding box, label the target type and confidence score.
4.2. Model Training and Testing Effects
4.2.1. Test Environment Configuration and Data Preparation
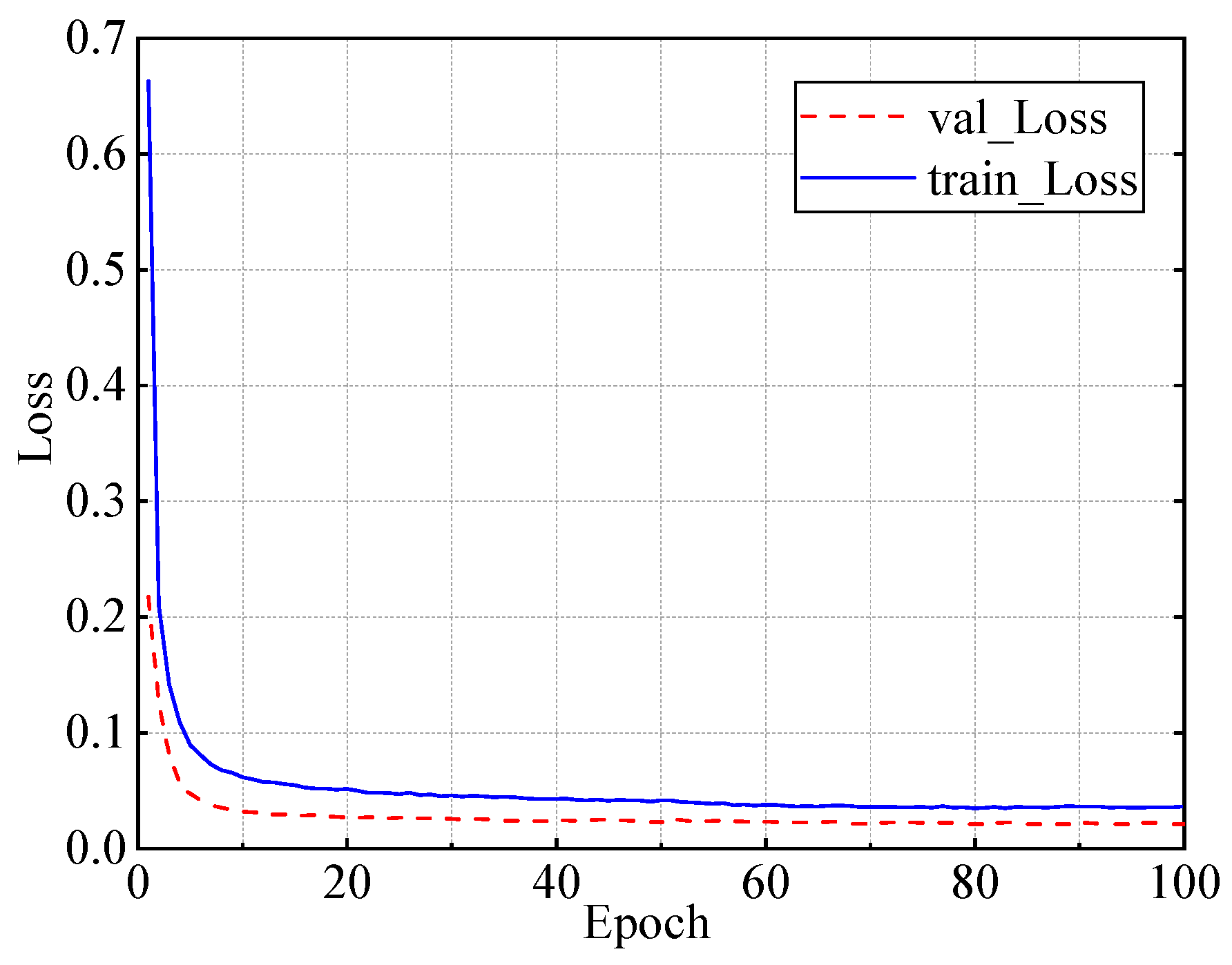
4.2.2. Comparison of Training Methods
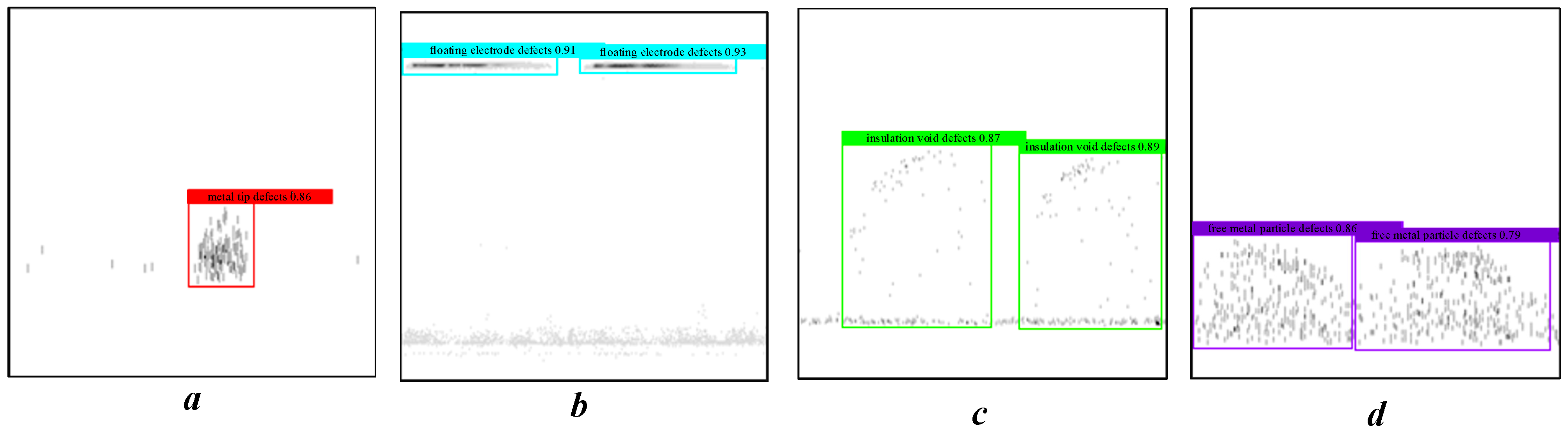
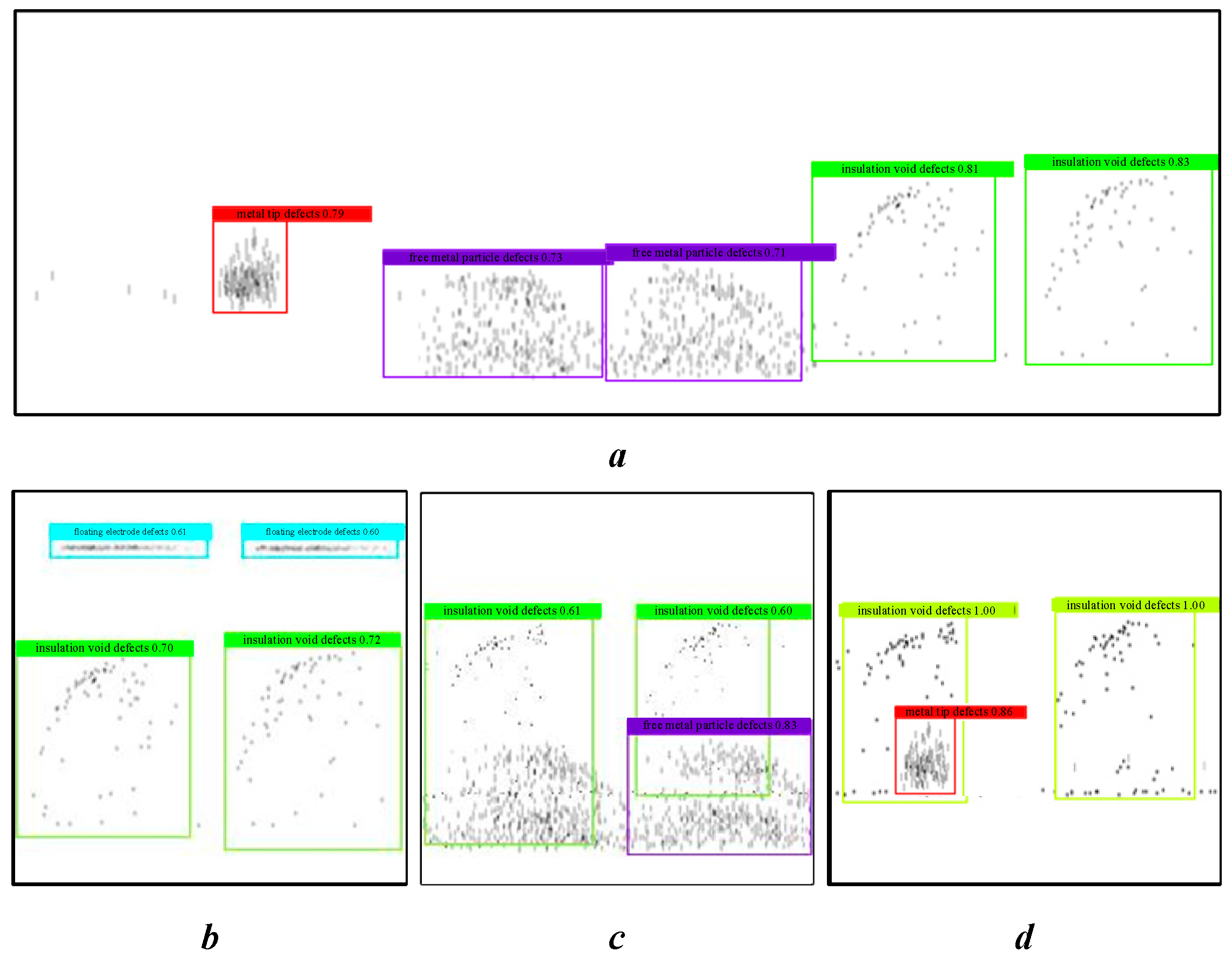
4.3. Comparison of Detection Methods
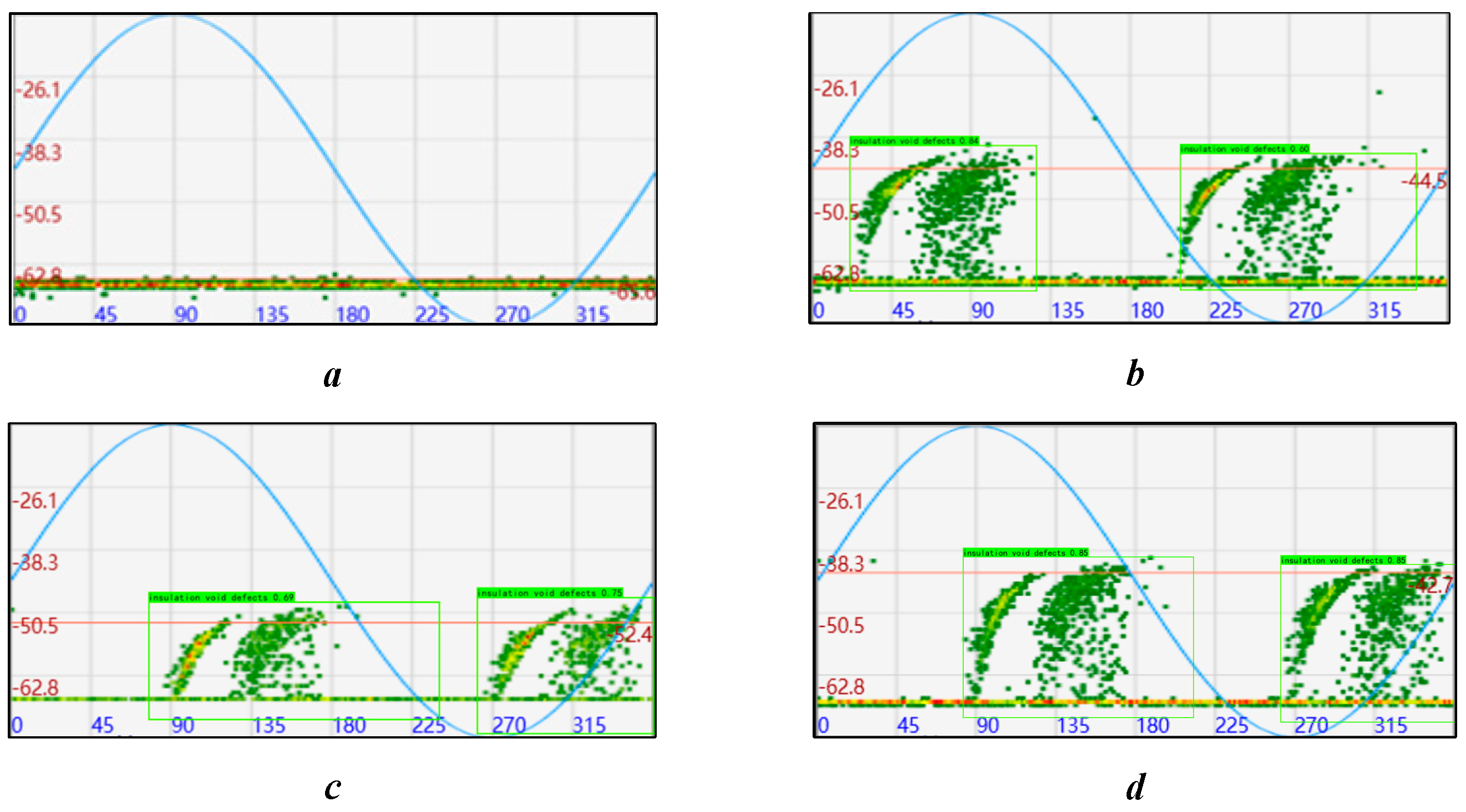
5. Case Study
6. Conclusions
- The different combinations of three training techniques, Mosaic data enhancement, cosine annealing decay, and smoothing labeling, are performed. The detection result and detection efficiency of the models under different training methods are compared and analyzed. The optimal detection model can be obtained by using a combination of cosine annealing attenuation and label smoothing training techniques.
- The YOLOv5 model is compared with other deep learning target detection models. The results show that other models always have a lower accuracy rate in detecting a certain type of partial discharge defect, and the YOLOv5 model has higher target recognition accuracy and recognition result, with a mAP value of 95.89% and an FPS of 28.89.
- Based on laboratory verification results, the GIS partial discharge defect detection model can identify multiple fault types at the same time. It can be applied to the scene where one or more fault types of GIS failure occur at the same time, and it can also be applied to the scene where GIS failure occurs in a short period of time.
- The GIS partial discharge defect identification model proposed is trained and used for practical application, and the consistency of the identification results and the disintegration results verifies the accuracy of the model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ren, M.; Zhou, J.; Miao, J. Adopting spectral analysis in partial discharge fault diagnosis of GIS with a micro built-in optical sensor. IEEE Trans. Power Deliv. 2021, 36, 1237–1240. [Google Scholar] [CrossRef]
- Niu, X.; Shao, S.; Xin, C.; Zhou, J.; Guo, S.; Chen, X.; Qi, F. Workload allocation mechanism for minimum service delay in edge computing-based power Internet of things. IEEE Access 2019, 7, 2169–3536. [Google Scholar] [CrossRef]
- Hu, W.; Yao, W.; Hu, Y.; Li, H. Selection of cluster heads for wireless sensor network in ubiquitous power internet of things. Int. J. Comput. Commun. Control 2019, 14, 344–358. [Google Scholar] [CrossRef]
- Shahsavarian, T.; Pan, Y.; Zhang, Z.; Pan, C.; Naderiallaf, H.; Guo, J.; Li, C.; Cao, Y. A Review of knowledge-based defect identification via PRPD patterns in high voltage apparatus. IEEE Access 2021, 9, 77705–77728. [Google Scholar] [CrossRef]
- Reffas, A.; Beroual, A.; Moulai, H. Comparison of creeping discharges propagating over pressboard immersed in olive oil, mineral oil and other natural and synthetic ester liquids under DC voltage. IEEE Trans. Dielectr. Electr. Insul. 2019, 26, 2019–2026. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, C.; Dong, M.; He, Z. Fault prediction of gas-insulated system with hypersensitive optical monitoring and spectral information. Int. J. Electr. Power Energy Syst. 2020, 119, 105945. [Google Scholar] [CrossRef]
- Li, G.; Wang, X.; Li, X.; Yang, A.; Rong, M. Partial discharge recognition with a multi-resolution convolutional neural network. Sensors 2018, 18, 3512. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Yan, J.; Sun, Q.; Li, J.; Yang, Z. A MobileNets Convolutional Neural Network for GIS Partial Discharge Pattern Recognition in the Ubiquitous Power Internet of Things Context Optimization Comparison and Application. IEEE Access 2019, 7, 150226–150236. [Google Scholar] [CrossRef]
- Song, H.; Dai, J.; Sheng, G.; Jiang, X. GIS Partial Discharge Pattern Recognition via Deep Convolutional Neural Network under Complex Data Sources. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 678–685. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Yang, W.; Jiang, D. A Novel Adversarial Learning Framework in Deep Convolutional Neural Network for Intelligent Diagnosis of Mechanical Faults. Knowl. Based Syst. 2019, 165, 474–4875. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, J.; Yang, Z.; Zhao, Y.; Liu, T. Optimizing GIS partial discharge pattern recognition in the ubiquitous power internet of things context: A MixNet deep learning model. Int. J. Electr. Power Energy Syst. 2021, 125, 106484. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2015; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Lian, H. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Zheng, J.; Sun, S.; Zhao, S. Fast ship detection based on lightweight YOLOv5 network. IET Image Process. 2022, 16, 1585–1593. [Google Scholar] [CrossRef]
- Wang, C.Y.; Liao, H.Y.M.; Yeh, I.H.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the 2000 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 8759–8768. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, W.; Wang, X.; Zeng, X.; Shi, Q.; Luo, P.; Tian, Y.; Li, H.; Yang, S.; Zhe, W.; Loy, C.C. DeepID-net: Deformable deep convolutional neural networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 2403–2412. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Liu, M.; Li, Z.; Li, Y.; Liu, Y. A fast and accurate method of power line intelligent inspection based on edge computing. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Du, S.; Zhang, B.; Zhang, P. Scale-Sensitive IOU Loss: An improved regression loss function in remote sensing object detection. IEEE Access 2021, 9, 141258–141272. [Google Scholar] [CrossRef]
- Bodla, N.; Singh, B.; Chellappa, R.; Davis, L.S. Soft-NMS—Improving object detection with one line of code. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5561–5569. [Google Scholar]
- Wen, L.; Gao, L.; Li, X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern. Syst. Hum. 2019, 49, 136–144. [Google Scholar] [CrossRef]
- Kermany, D.S.; Goldbaum, M.; Cai, W.; Valentim, C.C.S.; Liang, H.; Baxter, S.L.; McKeown, A.; Yang, G.; Wu, X.; Yan, F.; et al. Identifying medical diagnoses and treatable diseases by image-based deep learning. Cell 2018, 172, 1122–1131. [Google Scholar] [CrossRef]
- Qiu, Z.; Zhu, X.; Liao, C.; Shi, D.; Qu, W. Detection of transmission line insulator defects based on an improved lightweight YOLOv4 model. Appl. Sci. 2022, 12, 121207. [Google Scholar] [CrossRef]
- Müller, R.; Kornblith, S.; Hinton, G.E. When does label smoothing help? Adv. Neural Inf. Proces. Syst. 2019, 32, 4694–4703. [Google Scholar]
- Qiu, Z.; Zhu, X.; Liao, C.; Shi, D.; Kuang, Y.; Li, Y.; Zhang, Y. Detection of bird species related to transmission line faults based on lightweight convolutional neural network. IET Gener. Transm. Distrib. 2021, 16, 1–13. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | YOLOv5s | YOLOv5m | YOLOv5l | YOLOv5x |
|---|---|---|---|---|
| Depth-multiple | 0.33 | 0.67 | 1.0 | 1.33 |
| Width-multiple | 0.50 | 0.75 | 1.0 | 1.25 |
| CSPN Number(Backbone) | 1, 3, 3 | 2, 6, 6 | 3, 9, 9 | 4, 12, 12 |
| CSPN Number(Neck) | 1 | 2 | 3 | 4 |
| Conv kernel number | 32, 64, 128, 256, 512 | 48, 96, 192, 384, 768 | 64, 128, 256, 512, 1024 | 80, 160, 320, 640, 1280 |
| Learning Step | Model Parameter | |||
|---|---|---|---|---|
| Training Sample | Batch-Size | Learning Rate | Epoch | |
| Freeze | 3435 | 16 | 1 × 10−3 | 50 |
| Unfreeze | 3435 | 8 | 1 × 10−4 | 50 |
| Project | Environment |
|---|---|
| Operating System | Windows10 (×64) |
| CPU | Intel Xeon E5-2678 v3 |
| GPU(MB) | NVIDIA GeForce GTX3080 Ti (16 G) |
| RAM | 64 G |
| Python | 3.9.1 |
| CUDA | 11.1 |
| Group | Training Methods | mAP/% | FPS | ||
|---|---|---|---|---|---|
| Mosaic | Cos | Label-s | |||
| 1 | × | × | × | 94.28 | 25.36 |
| 2 | × | ✓ | × | 95.07 | 27.46 |
| 3 | × | ✓ | ✓ | 95.89 | 28.89 |
| 4 | ✓ | ✓ | ✓ | 91.73 | 26.53 |
| Method | Resolution | AP/% | mAP/% | FPS | |||
|---|---|---|---|---|---|---|---|
| Corona Discharge | Insulation Discharge | Floating Electrode Discharge | Free Particle Discharge | ||||
| SSD | 300 × 300 | 94.57 | 96.74 | 92.49 | 97.31 | 95.28 | 29.34 |
| Faster-RCNN | 600 × 600 | 97.20 | 98.71 | 82.81 | 95.73 | 93.16 | 18.42 |
| YOLOv3 | 416 × 416 | 93.57 | 96.06 | 95.99 | 96.17 | 95.45 | 27.39 |
| YOLOv4 | 416 × 416 | 92.88 | 70.51 | 90.17 | 68.21 | 80.44 | 27.45 |
| YOLOv5 | 640 × 640 | 96.74 | 97.01 | 93.76 | 96.06 | 95.89 | 28.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Qiu, Z.; Liao, C.; Zhou, Z.; Li, T.; Wu, Z. A GIS Partial Discharge Defect Identification Method Based on YOLOv5. Appl. Sci. 2022, 12, 8360. https://doi.org/10.3390/app12168360
Lu Y, Qiu Z, Liao C, Zhou Z, Li T, Wu Z. A GIS Partial Discharge Defect Identification Method Based on YOLOv5. Applied Sciences. 2022; 12(16):8360. https://doi.org/10.3390/app12168360
Chicago/Turabian StyleLu, Yao, Zhibin Qiu, Caibo Liao, Zhibiao Zhou, Tonghongfei Li, and Zijian Wu. 2022. "A GIS Partial Discharge Defect Identification Method Based on YOLOv5" Applied Sciences 12, no. 16: 8360. https://doi.org/10.3390/app12168360
APA StyleLu, Y., Qiu, Z., Liao, C., Zhou, Z., Li, T., & Wu, Z. (2022). A GIS Partial Discharge Defect Identification Method Based on YOLOv5. Applied Sciences, 12(16), 8360. https://doi.org/10.3390/app12168360