
Analysis of Malicious Node Identification Algorithm of Internet of Vehicles under Blockchain Technology: A Case Study of Intelligent Technology in Automotive Engineering

Abstract
:1. Introduction
2. Application of Regional Chain Technology in the Internet of Vehicles
3. Research Status Quo
4. Application of Blockchain Technology in the Internet of Vehicles
4.1. Blockchain Technology
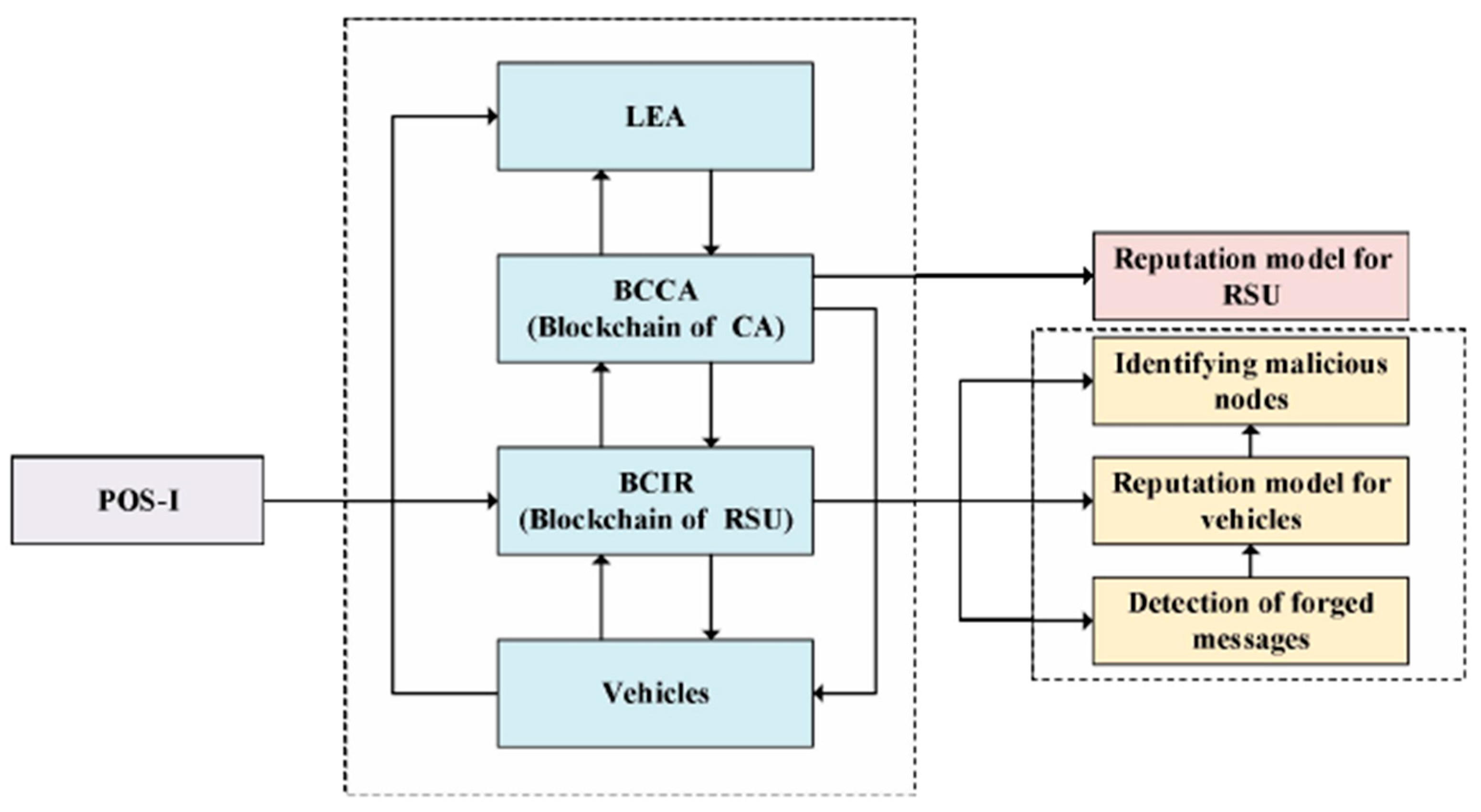
4.2. Structure of the Malicious Node Identification Algorithm
4.3. Authentication Algorithm
4.4. POS Consensus Algorithm Improvement
| Algorithm 1 Consensus mechanism POS-I |
| Input: Egy0, k, ThEgy, TPOS, a, J, Pr; |
| Output: committer peer; |
| 1: RSU sends a request to CA: |
| 2: BCCA initializes an election for selecting committer peer; |
| 3: for all RSU participating in the election do |
| 4: submITS as deposit; |
| 5: Calculate |
| 6: if Then; |
| 7: cannot participate in the election; |
| 8: else |
| 9: is regarded as a candidate; |
| 10: end if |
| 11: Calculate ; |
| 12: end for |
| 13: Selecting the node whose has as the committer peer; |
| 14: Calculate |
| 15: Calculate |
| 16: Output committer peer. |
5. Results Analysis of the Malicious Node Identification Algorithm of Blockchain Technology
5.1. Simulation Software Setting
- Suppose an attacker cannot attack more than half the vehicles on the network.
- Authorities and the RSU are equipped with customized hardware with high computing abilities.
- Certification bodies and RSU are equipped with custom hardware, with a much higher computing power than general computers.
- As long as the public or private keys are not stolen, encryption technology can be used to provide secure communication channels between entities.
5.2. Evaluating Indicator
5.3. Simulation Software and Simulation Environment
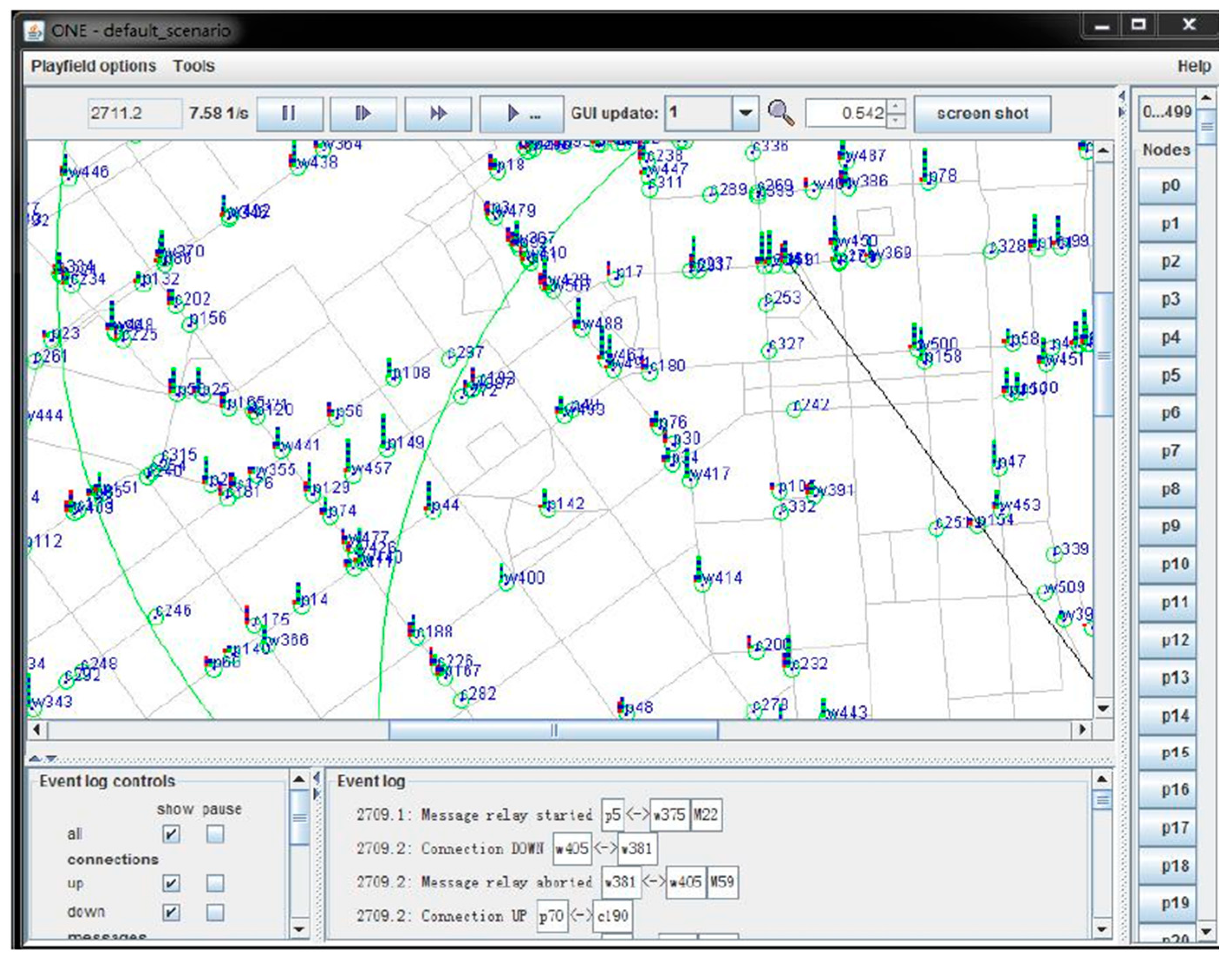
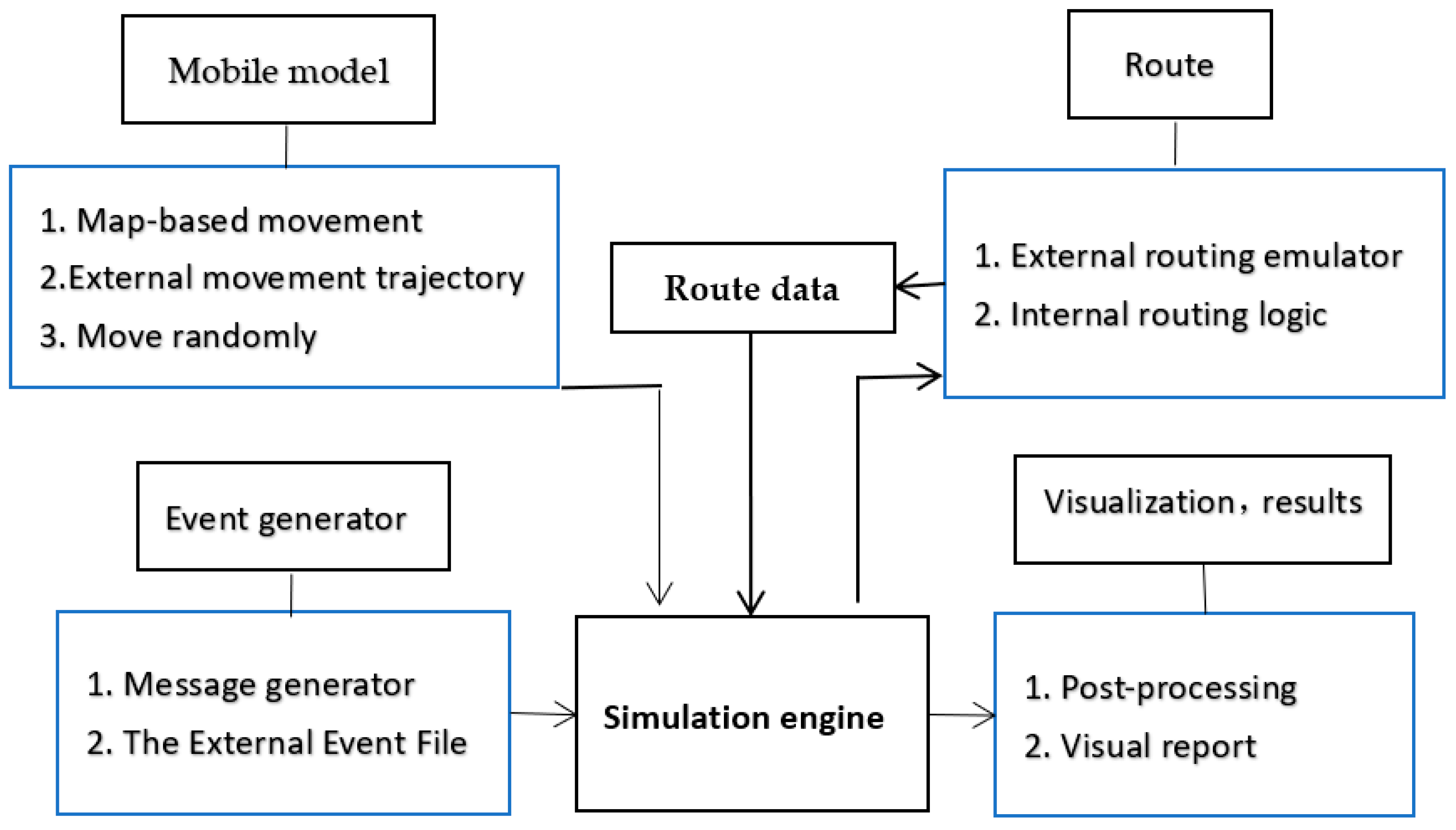
5.3.1. Simulation Software
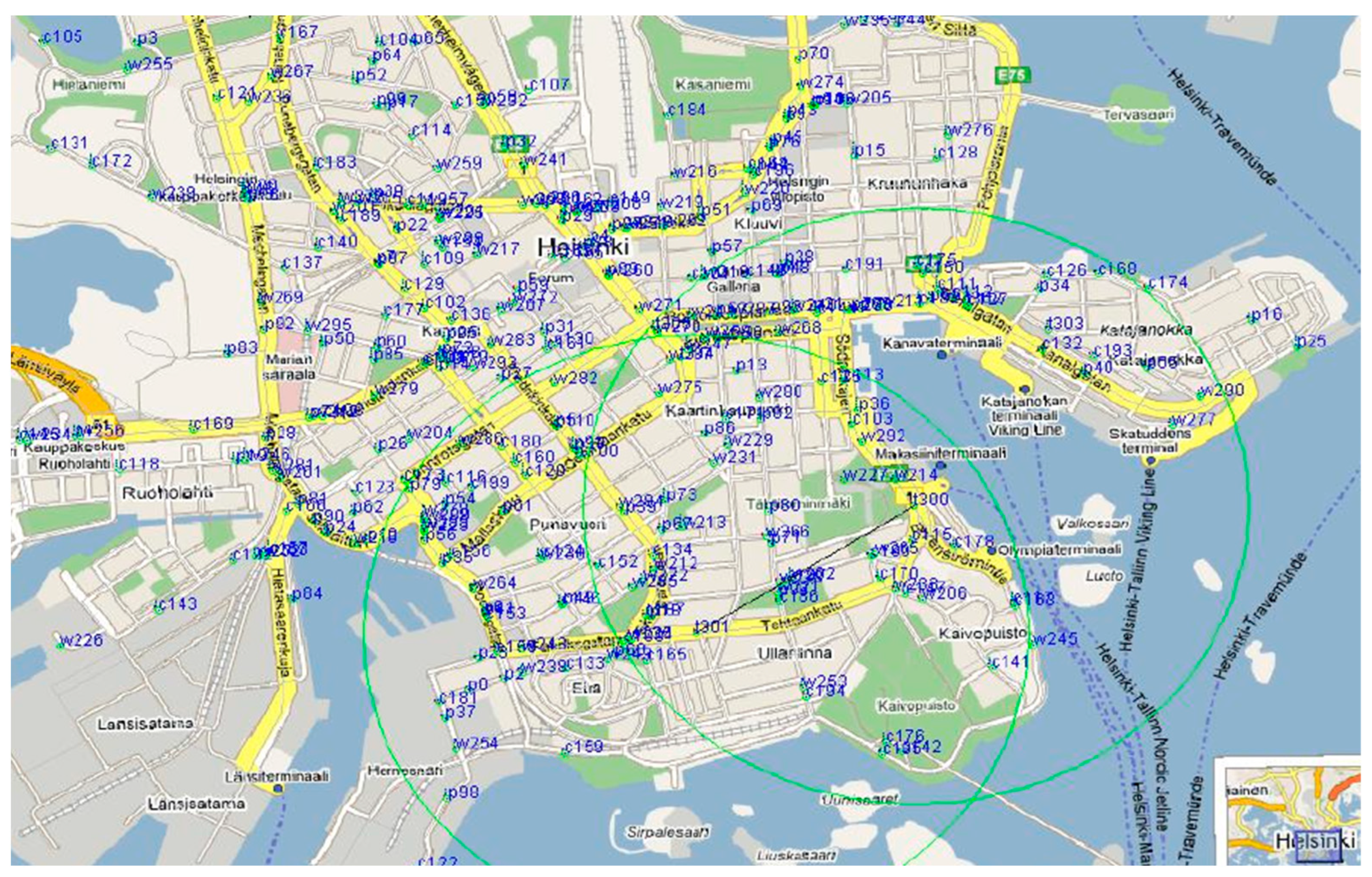
5.3.2. Simulation Environment
- Suppose that an attacker cannot attack more than half of the vehicles in the network.
- Authorities and the RSU are equipped with customized hardware with high computing abilities.
- Certification bodies and RSU are equipped with custom hardware with a much higher computing power than general computers.
- As long as the public or private keys are not stolen, encryption technology can be used to provide secure communication channels between entities.
5.4. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abboud, K.; Omar, H.A.; Zhuang, W. Inter working of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Zhongmei, L.; Wei, C.; Jie, W.; Haitao, Y. Very low latency and high reliability communication of Internet of Vehicles: Status and Outlook. Signal Process. 2019, 35, 1773–1783. [Google Scholar]
- Nasrollahi, M.; Fathi, M.R. Modeling Big Data Enablers for Service Operations Management. In Big Data and Blockchain for Service Operations Management; Springer: Cham, Switzerland, 2022; pp. 49–94. [Google Scholar]
- Ravari, S.S.M.; Fathi, M.R.; Mohammadi, M.; Bandarian, R. Investigating the concept of effectiveness in technology development projects in a research and technology organizations; evaluating eight technology development projects in the Research Institute of Petroleum Industry (RIPI). Pet. Bus. Rev. 2020, 4, 21–41. [Google Scholar] [CrossRef]
- Yu, H.; Zhao, C.; Li, S.; Wang, Z.; Zhang, Y. Pre-Work for the Birth of Driver-Less Scraper (LHD) in the Underground Mine: The Path Tracking Control Based on an LQR Controller and Algorithms Comparison. Sensors 2021, 21, 7839. [Google Scholar] [CrossRef]
- Parsajoo, M.; Armaghani, D.J.; Mohammed, A.S.; Khari, M.; Jahandari, S. Tensile strength prediction of rock material using non-destructive tests: A comparative intelligent study. Transp. Geotech. 2021, 31, 100652. [Google Scholar] [CrossRef]
- Arushi, A.; Kumar, Y.S. Block Chain Based Security Mechanism for Internet of Vehicles (IoV). In Proceedings of the 3rd International Conference on Internet of Things and Connected Technologies (ICIoTCT), Jaipur, India, 26–27 March 2018; pp. 267–272. [Google Scholar]
- Wagner, M.; Mcmillin, B. Cyber-Physical Transactions: A Method for Securing VANETs with Blockchains. In Proceedings of the IEEE Pacific Rim International, Symposium on Dependable Computing, Taipei, Taiwan, 4–7 December 2018; pp. 64–73. [Google Scholar]
- Yu, H.; Li, S. The Function Design for the Communication-Based Train Control (CBTC) System: How to Solve the Problems in the Underground Mine Rail Transportation? Appl. Syst. Innov. 2021, 4, 31. [Google Scholar] [CrossRef]
- Campanile, L.; Iacono, M.; Marulli, F.; Mastroianni, M. Designing a GDPR compliant blockchain-based IoV distributed information tracking system. Inf. Process. Manag. 2021, 58, 102511. [Google Scholar] [CrossRef]
- Chen, W.; Yuan, L.; Wei, L. Progress of Internet of Vehicles Industry and Key Technology Analysis. Zte Technol. 2020, 26, 5–11. [Google Scholar]
- Lin, L.; Lu, L.; Yuming, G. Analysis of Internet of Vehicles Communication Standardization and Industry Development. Telecommun. Sci. 2020, 36, 15–26. [Google Scholar]
- Rongyue, Y.; Pengzhou, Z.; Qing, S. Research and Outlook of Intelligent Internet of Vehicles based on 5G Technology. Telecommun. Sci. 2020, 36, 106–114. [Google Scholar]
- Jiahui, Q.; Zhichao, Z.; Xiaobo, L.; Yu, X.; Chao, C.; Liu, L. Research and Application of Internet of Vehicles Technology based on MEC. Telecommun. Sci. 2020, 36, 45–55. [Google Scholar]
- Junhao, Y.; Zongpu, J.; Dongying, L. Intelligent Mine Internet of Vehicles System Architecture and Key Technologies. Coal Sci. Technol. 2020, 48, 249–254. [Google Scholar]
- Rundong, W.; Wanwei, L.; Xiuliang, M.; Wenjun, Y. Summary of Mutual trust Certification and safe Communication of Internet of Vehicles. Comput. Sci. 2020, 47, 1–9. [Google Scholar]
- Xiaolong, X.; Zijie, F.; Lianyong, Q.; Wanchun, D.; Qiang, H.; Yucong, D. Distributed service uninstallation method based on deep reinforcement learning in the edge computing environment of Internet of Vehicles. J. Comput. Sci. 2021, 44, 2382–2405. [Google Scholar]
- Li, S.; Wang, G.; Yu, H.; Wang, X. Engineering Project: The Method to Solve Practical Problems for the Monitoring and Control of Driver-Less Electric Transport Vehicles in the Underground Mines. World Electr. Veh. J. 2021, 12, 64. [Google Scholar] [CrossRef]
- Momeni, E.; Nazir, R.; Armaghani, D.J.; Maizir, H. Prediction of pile bearing capacity using a hybrid genetic algorithm-based ANN. Measurement 2014, 57, 122–131. [Google Scholar] [CrossRef]
- Tao, S.; Xiuhua, L.; Hui, L.; Junhao, W.; Qingyu, X.; Jie, C. Summary of research on the car network security encryption authentication technology in the era of big data. Comput. Sci. 2022, 49, 340–353. [Google Scholar]
- Xiao, W.; Tingting, T.; Shuangshuang, H.; Dongpu, C.; Feiyue, W. Parallel vehicle networking: Intelligent vehicle network management and control based on ACP. J. Autom. 2018, 44, 1391–1404. [Google Scholar]
- Xinghua, L.; Cheng, Z.; Ying, C.; Huilin, Z.; Jian, W. A Review of Internet of Vehicles Security. J. Inf. Secur. 2019, 4, 17–33. [Google Scholar]
- Wang, R.; Deng, X.; Xu, Z.; Zhao, X. Review of Simulation Test and Evaluation Technology of Internet of Vehicles. Comput. Appl. Res. 2019, 36, 1921–1926, 1939. [Google Scholar]
- Paschek, D.; Mocan, A.; Draghici, A. Industry 5.0–The Expected Impact of Next Industrial Revolution. In Thriving on Future Education, Industry, Business and Society, Proceedings of the MakeLearn and TIIM International Conference, Piran, Slovenia, 15–17 May 2019; ToKnowPress: Bangkok, Thailand, 2019. [Google Scholar]
- Hasanipanah, M.; Monjezi, M.; Shahnazar, A.; Armaghani, D.J.; Farazmand, A. Feasibility of indirect determination of blast induced ground vibration based on support vector machine. Measurement 2015, 75, 289–297. [Google Scholar] [CrossRef]
- Garg, S.; Singh, A.; Aujla, G.S.; Kaur, S.; Batra, S.; Kumar, N. A Probabilistic Data Structures-Based Anomaly Detection Scheme for Software-Defined Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3557–3566. [Google Scholar] [CrossRef]
- Junejo, M.H.; Ab Rahman AA, H.; Shaikh, R.A.; Mohamad Yusof, K.; Memon, I.; Fazal, H.; Kumar, D. A Privacy-Preserving Attack-Resistant Trust Model for Internet of Vehicles Ad Hoc Networks. Sci. Program. 2020, 2020, 1–21. [Google Scholar] [CrossRef]
- Lamba, K.; Singh, S.P. Modeling Big Data Enablers for Operations and Supply Chain Management. Int. J. Logist. Manag. 2018, 29, 629–658. [Google Scholar] [CrossRef]
- Chen, J.M.; Li, T.T.; Panneerselvam, J. TMEC: A Trust Management Based on Evidence Combination on Attack-Resistant and Collaborative Internet of Vehicles. IEEE Access 2018, 7, 148913–148922. [Google Scholar] [CrossRef]
- Farooq, S.M.; Hussain, S.M.S.; Ustun, T.S. A Survey of Authentication Techniques in Vehicular Ad-Hoc Networks. IEEE Intell. Transp. Syst. Mag. 2021, 13, 39–52. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event ID | Event Type | TTLEvent (Lifecycle of the Warning Message) | Ranmsg (Transmission Range of the Alert Message) |
|---|---|---|---|
| I | Traffic congestion | Tht-I | Thd-I |
| II | Traffic accident | Tht-II | Thd-II |
| III | Road construction | Tht-III | Thd-III |
| IV | Road icing | Tht-IV | Thd-IV |
| The Parameter Name | Parameter Values |
|---|---|
| Simulation Scene Range (m2) | 4500 × 3400 |
| Simulation Time (s) | 0–43,200 |
| Vehicle mobility model | Shortest path movement model |
| Vehicle node type grouping (group) | 11 |
| Total number of vehicle nodes (individual) | 200–600 |
| Vehicle communication range (m) | 10 |
| Node speed (m/s) | 2 |
| RSU quantity (s) | 10 |
| Vehicle Cache Size (M) | 40 |
| Packet lifecycle (min) | 15 |
| Number of Malicious Vehicle Nodes in the Network | FAR | MDR | ||
|---|---|---|---|---|
| Low Flow Density | High Flow Density | Low Flow Density | High Flow Density | |
| 15% | 0.156 | 0.112 | 0.100 | 0.105 |
| 25% | 0.168 | 0.125 | 0.125 | 0.119 |
| 35% | 0.171 | 0.135 | 0.129 | 0.120 |
| 45% | 0.182 | 0.152 | 0.130 | 0.125 |
| Number of Malicious Vehicle Nodes in the Network | Dr (%) | Ad (s) | Or (KB/S) | |||
|---|---|---|---|---|---|---|
| Low Flow Density | High Flow Density | Low Flow Density | High Flow Density | Low Flow Density | High Flow Density | |
| 10% | 70.02 | 94.25 | 0.102 | 0.118 | 29.52 | 129.20 |
| 15% | 69.52 | 90.21 | 0.161 | 0.156 | 40.20 | 134.56 |
| 20% | 68.65 | 88.68 | 0.175 | 0.167 | 43.25 | 142.30 |
| 25% | 67.25 | 86.98 | 0.201 | 0.210 | 50.20 | 149.52 |
| 30% | 66.82 | 86.70 | 0.214 | 0.234 | 53.29 | 150.29 |
| 35% | 66.30 | 84.02 | 0.226 | 0.301 | 58.63 | 167.98 |
| 40% | 65.48 | 80.20 | 0.238 | 0.365 | 61.30 | 165.32 |
| 45% | 65.00 | 78.68 | 0.262 | 0.402 | 67.05 | 172.02 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Li, T.; Zhu, R. Analysis of Malicious Node Identification Algorithm of Internet of Vehicles under Blockchain Technology: A Case Study of Intelligent Technology in Automotive Engineering. Appl. Sci. 2022, 12, 8362. https://doi.org/10.3390/app12168362
Chen J, Li T, Zhu R. Analysis of Malicious Node Identification Algorithm of Internet of Vehicles under Blockchain Technology: A Case Study of Intelligent Technology in Automotive Engineering. Applied Sciences. 2022; 12(16):8362. https://doi.org/10.3390/app12168362
Chicago/Turabian StyleChen, Jing, Tong Li, and Rui Zhu. 2022. "Analysis of Malicious Node Identification Algorithm of Internet of Vehicles under Blockchain Technology: A Case Study of Intelligent Technology in Automotive Engineering" Applied Sciences 12, no. 16: 8362. https://doi.org/10.3390/app12168362
APA StyleChen, J., Li, T., & Zhu, R. (2022). Analysis of Malicious Node Identification Algorithm of Internet of Vehicles under Blockchain Technology: A Case Study of Intelligent Technology in Automotive Engineering. Applied Sciences, 12(16), 8362. https://doi.org/10.3390/app12168362