

Acoustic Propagation Characteristics of Unsaturated Porous Media Containing CO2 and Oil




Abstract
:1. Introduction
2. Fundamental Theory
3. Numerical Analysis
3.1. Wave Modes Characteristics
3.2. Sensitivity Analysis
4. Fluid Parameters Model Correction
4.1. Density Correction for the CO2–Oil Mixture
4.2. Velocity Correction for the CO2–Oil Mixture
5. Propagation Characteristics under the Modified Model
6. Conclusions
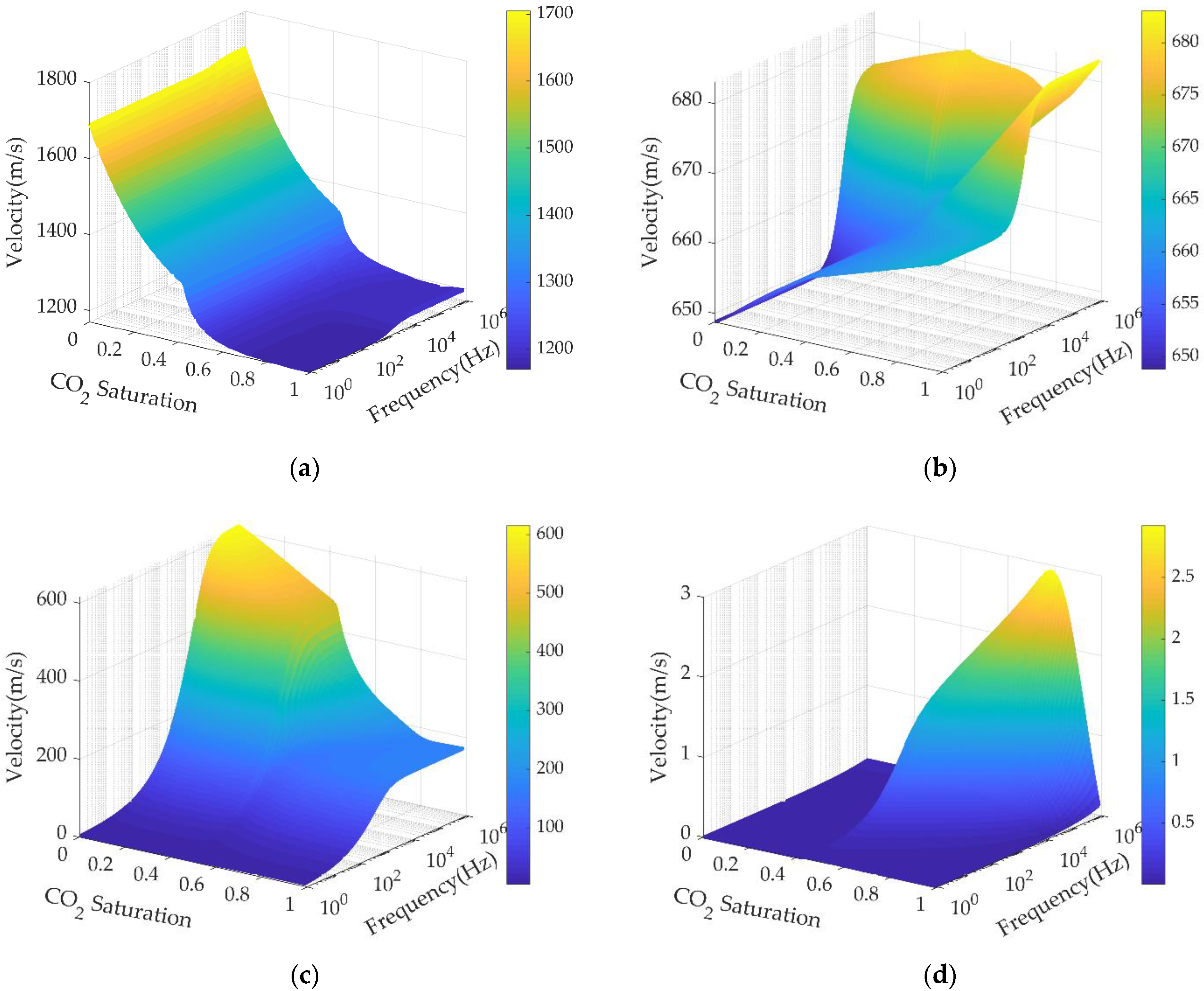
- There are four kinds of mode waves (three compressional waves and one shear wave) in the unsaturated porous media with pore fluid composed by CO2 and oil. However, only two mode waves, P1 and S, can be observed at seismic frequencies. The velocity and attenuation characteristics are sensitive to CO2 saturation, and the combined P1 and S waves can monitor the CO2 migration more accurately.
- In the analysis of acoustic wave modes, the accuracy of the features of pore fluid is crucial. The pore fluid density has an effect on both the velocities and attenuations of P1 and S, while the pore fluid velocity only has an effect on the velocity and attenuation of P1.
- The fluid parameter of Batzle’s model is based on hydrocarbon gas, which cannot accurately describe the physical parameters of the CO2–oil mixture. Compared with experimental data, the modified model can provide more exact data.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C

References
- Lee, H.S.; Cho, J.; Lee, Y.W.; Lee, K.S. Compositional Modeling of Impure CO2 Injection for Enhanced Oil Recovery and CO2 Storage. Appl. Sci. 2021, 11, 7907. [Google Scholar] [CrossRef]
- Harbert, W.; Goodman, A.; Spaulding, R.; Haljasmaa, I.; Crandall, D.; Sanguinito, S.; Kutchko, B.; Tkach, M.; Fuchs, S.; Werth, C.J.; et al. CO2 induced changes in Mount Simon sandstone: Understanding links to post CO2 injection monitoring, seismicity, and reservoir integrity. Int. J. Greenh. Gas Control 2020, 100, 103109. [Google Scholar] [CrossRef]
- Li, D.; Peng, S.; Guo, Y.; Lu, Y.; Cui, X. CO2 storage monitoring based on time-lapse seismic data via deep learning. Int. J. Greenh. Gas Control 2021, 108, 103336. [Google Scholar] [CrossRef]
- Maurya, S.P.; Singh, N.P. Seismic modelling of CO2 fluid substitution in a sandstone reservoir: A case study from Alberta, Canada. J. Earth Syst. Sci. 2019, 128, 236. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, X.; Wang, X. Wave Propagation Characteristics in Gas Hydrate-Bearing Sediments and Estimation of Hydrate Saturation. Energies 2021, 14, 804. [Google Scholar] [CrossRef]
- Biot, M.A. Mechanics of deformation and acoustic propagation in porous media. J. Appl. Phys. 1962, 33, 1482–1498. [Google Scholar] [CrossRef]
- Biot, M.A. Generalized theory of acoustic propagation in porous dissipative media. J. Acoust. Soc. Am. 1962, 34, 1254–1264. [Google Scholar] [CrossRef]
- Mavko, G.; Mukerji, T.; Dvorkin, J. The Rock Physics Handbook; Cambridge University Press: Cambridge, UK, 2009; pp. 175–177. ISBN 978-0-511-65062-8. [Google Scholar]
- White, J.E. Computed seismic speeds and attenuation in rocks with partial gas saturation. Geophysics 1975, 40, 224–232. [Google Scholar] [CrossRef]
- Johnson, D.L. Theory of frequency dependent acoustics in patchy-saturated porous media. J. Acoust. Soc. Am. 2001, 110, 682–694. [Google Scholar] [CrossRef]
- Ba, J.; Carcione, J.M.; Cao, H.; Du, Q.Z.; Yuan, Z.Y.; Lu, M.H. Velocity dispersion and attenuation of P waves in partially-saturated rocks: Wave propagation equations in double-porosity medium. Chin. J. Geophys. 2012, 55, 219–231. [Google Scholar]
- Santos, J.E.; Douglas Jr, J.; Corberó, J.; Lovera, O.M. A model for wave propagation in a porous medium saturated by a two-phase fluid. J. Acoust. Soc. Am. 1990, 87, 1439–1448. [Google Scholar] [CrossRef]
- Lo, W.C.; Sposito, G.; Majer, E. Wave propagation through elastic porous media containing two immiscible fluids. Water Resour. Res. 2005, 41. [Google Scholar] [CrossRef]
- Lo, W.C.; Yeh, C.L.; Lee, J.-W. Effect of viscous cross coupling between two immiscible fluids on elastic wave propagation and attenuation in unsaturated porous media. Adv. Water Resour. 2015, 83, 207–222. [Google Scholar] [CrossRef]
- Toms, J.; Mueller, T.M.; Gurevich, B. Seismic attenuation in porous rocks with random patchy saturation. Geophys. Prospect. 2007, 55, 671–678. [Google Scholar] [CrossRef]
- Sun, W.; Ba, J.; Mueller, T.M.; Carcione, J.M.; Cao, H. Comparison of P-wave attenuation models of wave-induced flow. Geophys. Prospect. 2015, 63, 378–390. [Google Scholar] [CrossRef]
- Carcione, J.M.; Picotti, S.; Gei, D.; Rossi, G. Physics and seismic modeling for monitoring CO2 storage. Pure Appl. Geophys. 2006, 163, 175–207. [Google Scholar] [CrossRef]
- Khasi, S.; Fayazi, A.; Kantzas, A. Effects of Acoustic Stimulation on Fluid Flow in Porous Media. Energy Fuels 2021, 35, 17580–17601. [Google Scholar] [CrossRef]
- Berryman, J.G.; Thigpen, L.; Chin, R.C.Y. Bulk elastic wave propagation in partially saturated porous solids. J. Acoust. Soc. Am. 1988, 84, 360–373. [Google Scholar] [CrossRef]
- Tuncay, K.; Corapcioglu, M.Y. Wave propagation in poroelastic media saturated by two fluids. J. Appl. Mech.-Trans. ASME 1997, 64, 313–320. [Google Scholar] [CrossRef]
- Jardani, A.; Revil, A. Seismoelectric couplings in a poroelastic material containing two immiscible fluid phases. Geophys. J. Int. 2015, 202, 850–870. [Google Scholar] [CrossRef]
- Wang, H.; Tian, L.; Zhang, K.; Liu, Z.; Huang, C.; Jiang, L.; Chai, X. How Is Ultrasonic-Assisted CO2 EOR to Unlock Oils from Unconventional Reservoirs? Sustainability 2021, 13, 10010. [Google Scholar] [CrossRef]
- Batzle, M.; Wang, Z.J. Seismic properties of pore fluids. Geophysics 1992, 57, 1396–1408. [Google Scholar] [CrossRef]
- Han, D.-h.; Sun, M.; Liu, J. Velocity and density of oil-HC-CO2 miscible mixtures. In Proceedings of the 2013 SEG Annual Meeting, Houston, TX, USA, 22–27 September 2013. [Google Scholar]
- Leclaire, P.; Cohen-Ténoudji, F.; Aguirre-Puente, J. Extension of Biot’s theory of wave propagation to frozen porous media. J. Acoust. Soc. Am. 1994, 96, 3753–3768. [Google Scholar] [CrossRef]
- Span, R.; Wagner, W. A new equation of state for carbon dioxide covering the fluid region from the triple-point temperature to 1100 K at pressures up to 800 MPa. J. Phys. Chem. Ref. Data 1996, 25, 1509–1596. [Google Scholar] [CrossRef]
- Mosavat, N.; Abedini, A.; Torabi, F. Phase behaviour of CO2–brine and CO2–oil systems for CO2 storage and enhanced oil recovery: Experimental studies. Energy Procedia 2014, 63, 5631–5645. [Google Scholar] [CrossRef]
- Emera, M.K.; Sarma, H.K. Prediction of CO2 solubility in oil and the effects on the oil physical properties. Energy Sources Part A-Recovery Util. Environ. Eff. 2007, 29, 1233–1242. [Google Scholar] [CrossRef]
- Cheng, C.H.; Toksoz, M.N.; Willis, M.E. Determination of in situ attenuation from full waveform acoustic logs. J. Geophys. Res. Solid Earth 1982, 87, 5477–5484. [Google Scholar] [CrossRef]
- Han, D.-h.; Liu, J.; Sun, M. Improvement of density model for oils. In SEG Technical Program Expanded Abstracts 2010; Society of Exploration Geophysicists: Houston, TX, USA, 2010; pp. 2459–2463. [Google Scholar]
- Saryazdi, F.; Motahhari, H.; Schoeggl, F.F.; Taylor, S.D.; Yarranton, H.W. Density of hydrocarbon mixtures and bitumen diluted with solvents and dissolved gases. Energy Fuels 2013, 27, 3666–3678. [Google Scholar] [CrossRef]
- Calabrese, C. Viscosity and Density of Reservoir Fluids with Dissolved CO2. Ph.D. Dissertation, Imperial College London, London, UK, 2017. [Google Scholar]
- Deruiter, R.A.; Nash, L.J.; Singletary, M.S. Solubility and displacement behavior of a viscous crude with CO2 and hydrocarbon gases. SPE Reserv. Eng. 1994, 9, 101–106. [Google Scholar] [CrossRef]
- Al Ghafri, S.Z.; Maitland, G.C.; Trusler, J.P.M. Experimental and modeling study of the phase behavior of synthetic crude oil + CO2. Fluid Phase Equilibria 2014, 365, 20–40. [Google Scholar] [CrossRef]
- Ratnakar, R.R.; Lewis, E.J.; Dindoruk, B. Effect of Dilution on Acoustic and Transport Properties of Reservoir Fluid Systems and Their Interplay. SPE J. 2020, 25, 2867–2880. [Google Scholar] [CrossRef]
- Berryman, J.G. Confirmation of Biot’s theory. Appl. Phys. Lett. 1980, 37, 382–384. [Google Scholar] [CrossRef]
- Ayub, M.; Bentsen, R.G. Experimental testing of interfacial coupling in two-phase flow in porous media. Pet. Sci. Technol. 2005, 23, 863–897. [Google Scholar] [CrossRef]
- Luckner, L.; Vangenuchten, M.T.; Nielsen, D.R. A consistent set of parametric models for the two-phase flow of immiscible fluids in the subsurface. Water Resour. Res. 1989, 25, 2187–2193. [Google Scholar] [CrossRef]
- Boxberg, M.S.; Prevost, J.H.; Tromp, J. Wave Propagation in Porous Media Saturated with Two Fluids Is it Feasible to Detect Leakage of a CO2 Storage Site Using Seismic Waves? Transp. Porous Media 2015, 107, 49–63. [Google Scholar] [CrossRef]
- Vangenuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameters | Value |
|---|---|---|
| Utsira sand | grain bulk modulus, Ks (GPa) | 40 1 |
| frame bulk modulus, Km (GPa) | 1.37 1 | |
| shear modulus, N (GPa) | 0.82 1 | |
| (kg/m3) | 2600 1 | |
| 0.36 1 | ||
| (D) | 1.6 1 | |
| Nonwetting fluid—CO2, (p = 10.3 MPa, T = 45 °C) | (kg/m3) | 539.07 2 |
| bulk modulus, K1 (MPa) | 30.6 2 | |
| ) | 38.9 2 | |
| CO2 gravity, G | 1.5281 2 | |
| Wetting fluid—oil, (p = 0.101 MPa, T = 25 °C) | (kg/m3) | 799 3 |
| ) | 2.76 3 | |
| Molar Weight, MW (g/mol) | 223 3 |
| bij | j = 0 | j = 1 | j = 2 |
|---|---|---|---|
| i = 0 | 4.034 × 10−3 | 1.319 × 10−4 | −5.814 × 10−7 |
| i = 1 | −7.016 × 10−5 | −1.286 × 10−6 | |
| i = 2 | −5.85 × 10−4 | 2.477 × 10−2 |
| Range of Experimental Data (46 Data Points in Total) | R2 of Correction for (Mg, Ng) | R2 of Correction for (Ms1, Ms2) | R2 of Correction for (Ns1, Ns2) |
|---|---|---|---|
| P ≤ 40 MPa (22 data points) | 0.9927 | 0.9634 | 0.9633 |
| T ≤ 40 °C (23 data points) | 0.9931 | 0.9629 | 0.9630 |
| XCO2 ≥ 40% (15 data points) | 0.9644 | 0.9637 | 0.9637 |
| XCO2 ≥ 8% (31 data points) | 0.9943 | 0.9637 | 0.9636 |
| Random (20 data points) | 0.9940 | 0.9636 | 0.9633 |
| Random (10 data points) | 0.9896 | 0.9637 | 0.9608 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, Y.; Zhang, X.; Liu, L. Acoustic Propagation Characteristics of Unsaturated Porous Media Containing CO2 and Oil. Appl. Sci. 2022, 12, 8899. https://doi.org/10.3390/app12178899
Qi Y, Zhang X, Liu L. Acoustic Propagation Characteristics of Unsaturated Porous Media Containing CO2 and Oil. Applied Sciences. 2022; 12(17):8899. https://doi.org/10.3390/app12178899
Chicago/Turabian StyleQi, Yujuan, Xiumei Zhang, and Lin Liu. 2022. "Acoustic Propagation Characteristics of Unsaturated Porous Media Containing CO2 and Oil" Applied Sciences 12, no. 17: 8899. https://doi.org/10.3390/app12178899
APA StyleQi, Y., Zhang, X., & Liu, L. (2022). Acoustic Propagation Characteristics of Unsaturated Porous Media Containing CO2 and Oil. Applied Sciences, 12(17), 8899. https://doi.org/10.3390/app12178899