

Applications of Metaheuristics Inspired by Nature in a Specific Optimisation Problem of a Postal Distribution Sector

Abstract
:1. Introduction
- Scenario analysis of strategic decisions in the context of cost optimisation and quality performance of the postal operator’s logistics network;
- Modelling the shape of the product portfolio in the context of service opportunities in the logistics network;
- The impact of the planned implementation of new services or acquisition of significant volumes from new customers on the cost position of services in the logistics network problems;
- The possibility of optimising the handling of individual products in line with the changing (increasing) quality requirements of the market, e.g., the possibility of changing the pick-up and delivery times of parcel shipments (of individual product groups) in different regions of the country and the delivery times (of individual product groups) in different regions of the country;
- Analysis of the possibility of bottlenecks in the logistics network with the expected increase in the volumes handled;
- Analysis of the schedules of planned investments in the network of logistics points, taking into account its efficiency parameters;
- Simulation of the demand for transport resources (quantity, type) and the feasibility of transport plans. Selection of optimal development models in the context of the adopted cost and environmental priorities.
- VRP;
- CRP;
- Time and delays;
- Penalty function.
2. Problem Description
2.1. Basic Logistic Problem
- vertices;
- arcs;
- streams;
- vehicle types;
- dimensions; ;
- logistic functions; ; the set is ordered;
- logistics function performing activities at a node in the logistics network such as receiving, unloading, loading and dispatch of postal goods;
- logistics function performing activities at a node in the logistics network such as processing and sorting postal goods;
- logistics function that does not perform any activity in a logistics network node;
- acceptable delays; ; the set is ordered;
- means that a package with a posting date t must be delivered by day from the sender to the recipient;
- set of arcs entering vertex ;
- set of arcs leaving vertex .
- source of stream ; ;
- destination of stream ; ;
- size of stream in dimension ;
- maximum acceptable delay of stream ; ;
- travel cost for vehicle type on arc ;
- capacity of vehicle type in dimension ;
- acceptable delay following acceptable delay , e.g., ;
- logistic function following logistic function , e.g., .
- amount of stream with acceptable delay after being subjected to logistic function on arc ; integer value;
- number of vehicles of type on arc ; integer value;
- amount of stream in vertex after being subjected to logistic function changing its acceptable delay to ; integer value;
- amount of stream in vertex with acceptable delay being subjected to logistic function ; integer value.
2.2. Extended Logistic Problem
- travel time on arc ;
- cost for stream being subjected to logistic function at vertex ;
- time needed for stream to be subjected to logistic function at vertex ;
- stream that is gathered together with stream s, i.e., both streams have to travel together before being subjected to logistic function ; , if s is independent, then ;
- time available to stream s with acceptable delay d; e.g., for D+2 stream s available at 7 a.m. that has to be delivered before 4 p.m., we have , , , .
3. Methods
3.1. Representation
- represents a vector of taken objects, i.e., stream realizations (both models);
- represents a vector of a drawn route from the set of prepared paths between all vertices (both models);
- represents capacity of a vehicle on each arc of the processed route (both models).
3.2. Variation Operators
- ReplaceCarsOperator during each invocation removes the number of cars set by the parameter and releases streams that they were transporting. Then, it attempts to fill already existing cars with free streams. If there are any remaining streams left, new cars are generated for them;
- ExchangeRealisationOperator removes a single stream from the number of cars set by the parameter. Then, it attempts to randomly fill already existing cars with free streams. If there are any remaining streams left, new cars are generated for them;
- MixRealisationsOperator unloads all cars and then it attempts to fill already existing cars with free streams. If there are any remaining streams left, new cars are generated for them.
- ReplaceCarsOperator—40%;
- ExchangeRealisationOperator—50%;
- MixRealisationsOperator—10%.
3.3. Evolutionary Algorithm
| Algorithm 1: Evolutionary Algorithm | ||
| Input: i, c, r Output: Best solution found Specimen ← RandomSolution stopCounter ← 0  |
3.4. Artificial Bee Colony Algorithm
| Algorithm 2: Artificial Bee Colony Algorithm | |||
| Input: N, m, i, c, r Output: Best solution found bees ← RandomSolutions(N);  |
4. Results
- Size of the workers population—30;
- Number of iterations—17000;
- Maximum number of iterations without improvement for a single bee—40;
- Weight of penalty factor that is penalizing not completely full cars—16.6%.
- Minimal part of cars/streams modified during a single call—6.25%;
- Maximal part of cars/streams modified during a single call—12.5%.
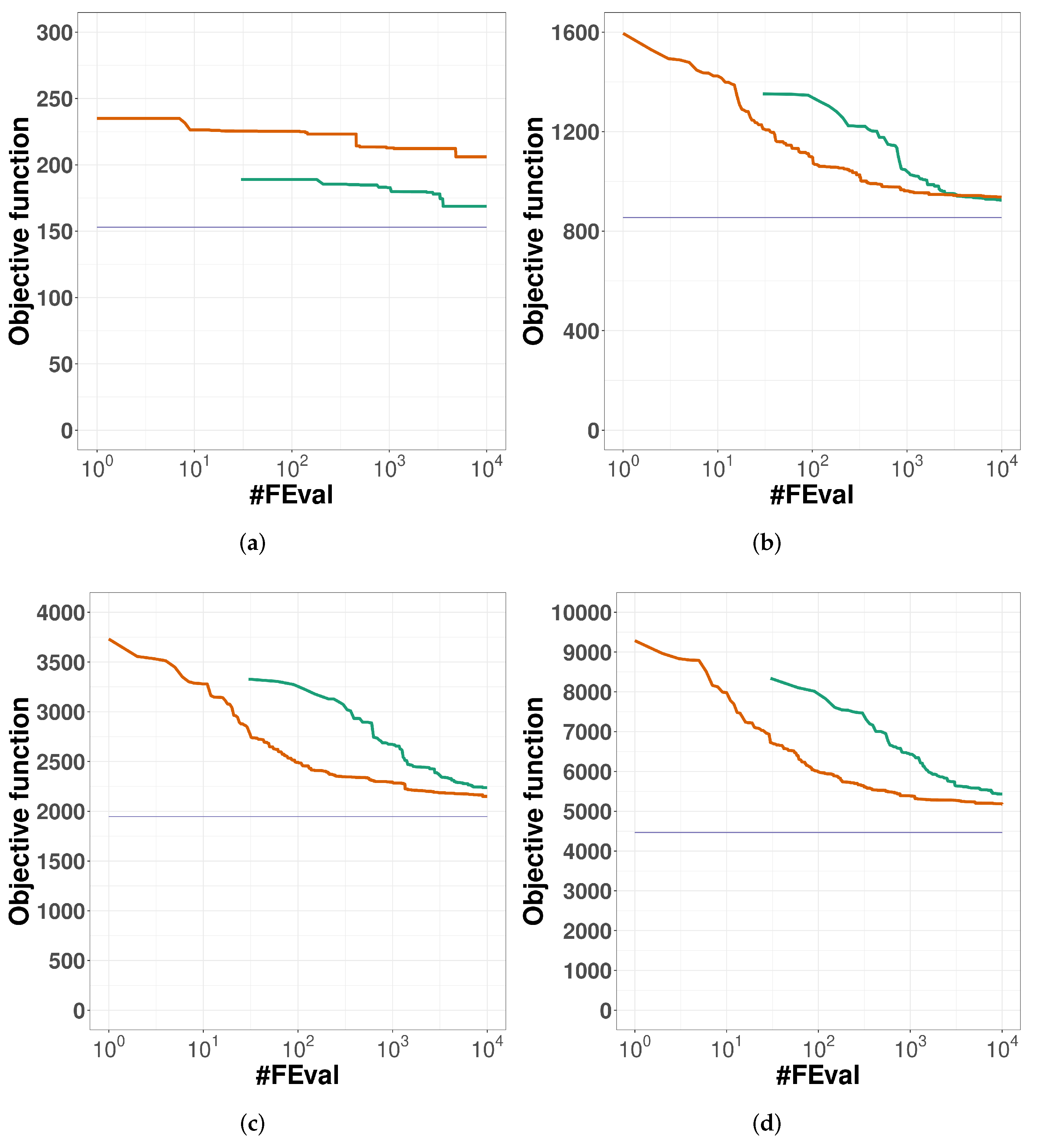
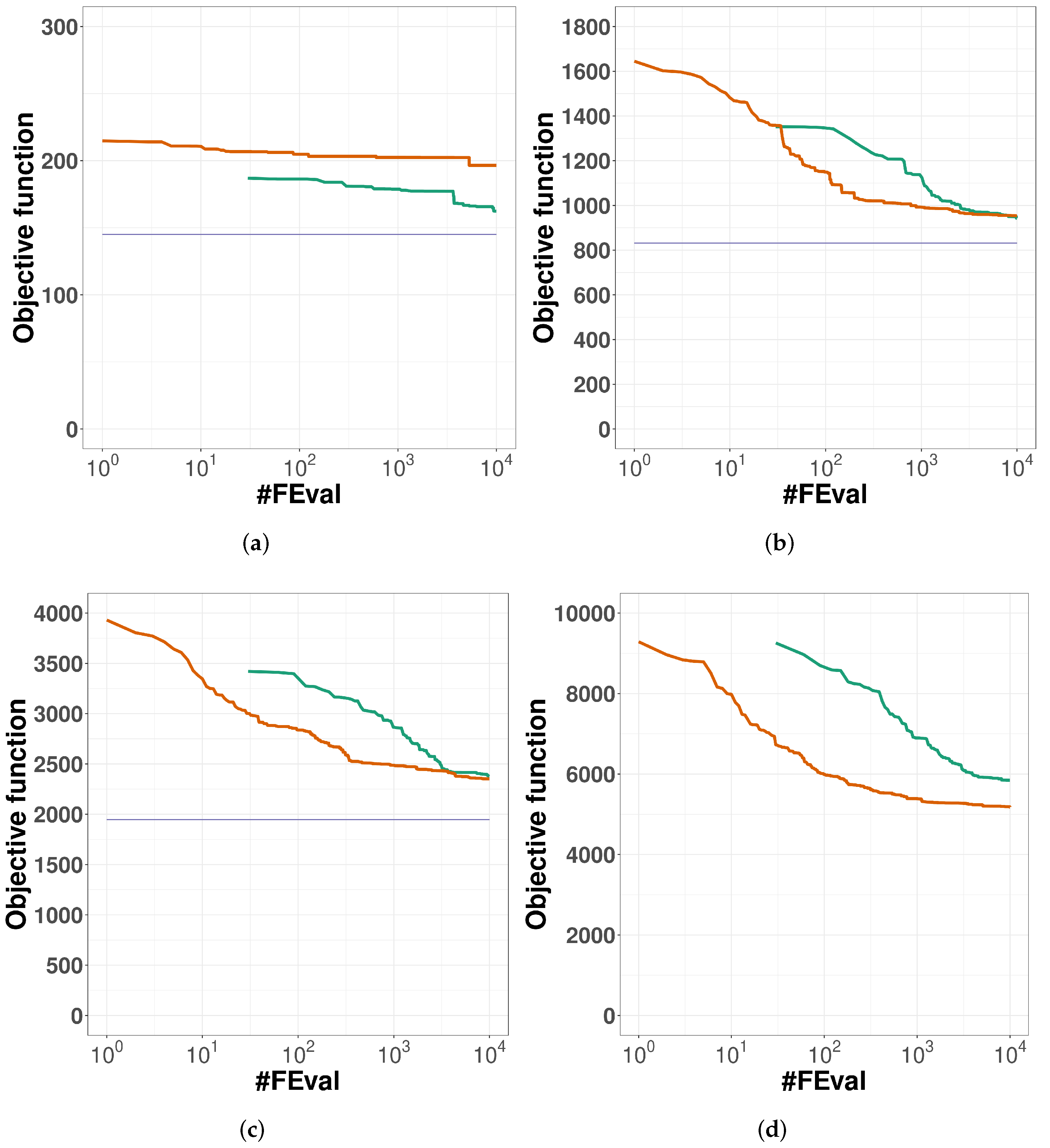
- For the BLP model (Figure 1), the MIP method found a solution in every case, with only NetworkSize = 5 being the optimal solution;
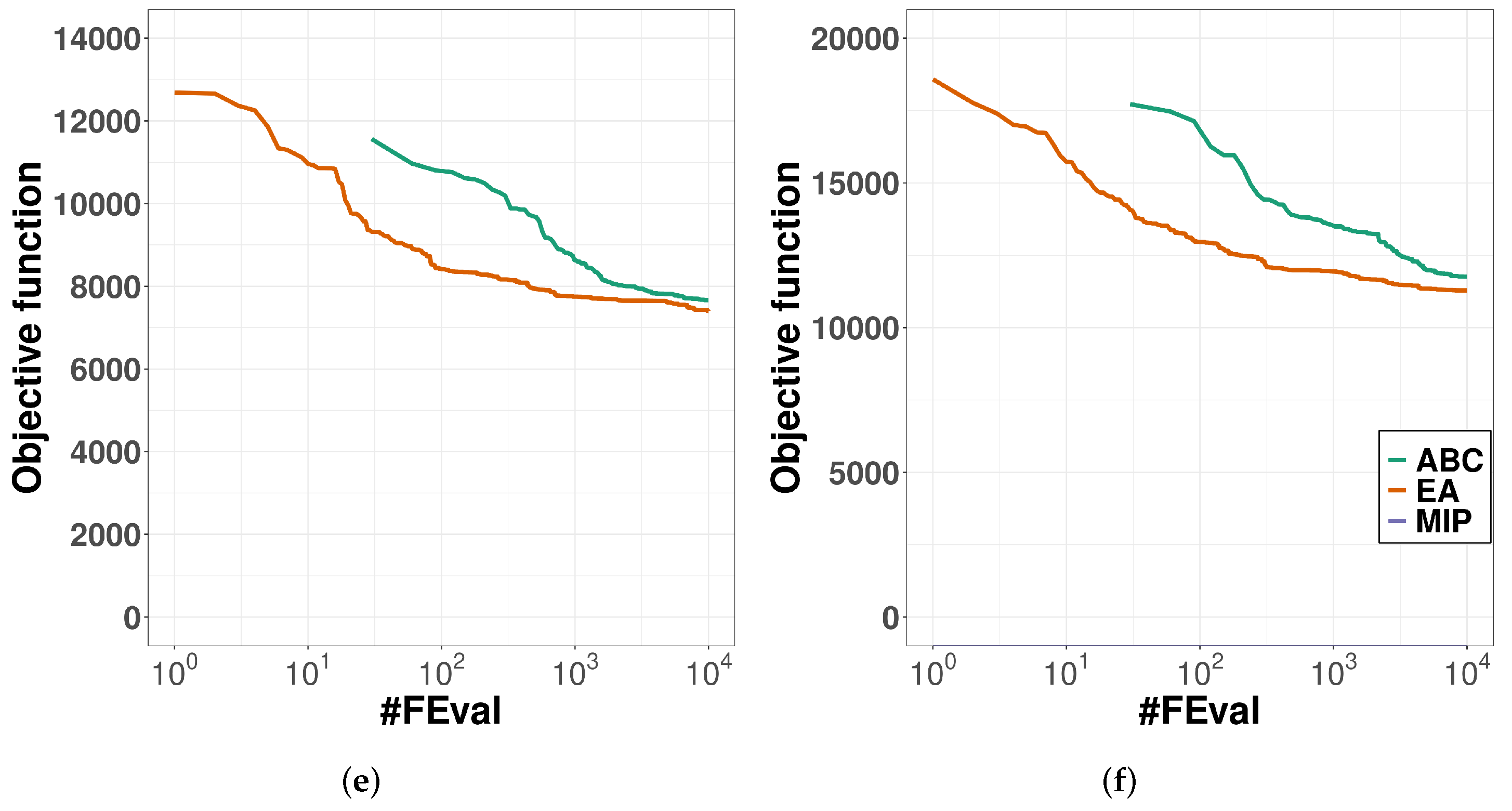
- In the case of the ELP model (Figure 2), the MIP method only found an optimum for the five-node network. However, for NetworkSize = 20, 25 and 30, it did not find an integer solution at all;
- Both heuristic methods found a sub-optimal solution in every case considered;
- In most cases, EA gives better results. However, for smaller network instances, the ABC method is comparable or slightly better. Such observation is strengthened by the results of the Mann–Whitney test (column T in Table 1 and Table 3). In most cases, for both problem variants, there is a significant difference in a location shift in favour of the EA algorithm.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | EA | ABC | MIP | Wilcoxon–Mann– | ||
|---|---|---|---|---|---|---|
| #Node | Mean | std | Mean | std | Whitney Test | |
| 5 | 12 | 0.3 | 1.98 | 0.1 | 4 | − |
| 7 | 26 | 1.3 | 7 | 0.3 | 83 | − |
| 10 | 83 | 1.1 | 129 | 8.2 | 83 | + |
| 12 | 132 | 1.54 | 162 | 16.4 | 43,200 | + |
| 15 | 325 | 3.35 | 518 | 37.5 | 43,200 | + |
| 17 | 463 | 10 | 773 | 53.1 | 43,200 | + |
| 20 | 1023 | 22 | 1816 | 155 | 43,200 | + |
| 22 | 1392 | 16 | 2568 | 230 | 43,200 | + |
| 25 | 2813 | 44.4 | 5353 | 298 | 43,200 | + |
| 30 | 5885 | 84 | 12,146 | 1949 | 43,200 | + |
| Network | EA | ABC | MIP | Wilcoxon–Mann– | ||
|---|---|---|---|---|---|---|
| #Node | Mean | Best | Mean | Best | Whitney Test | |
| 5 | 155 | 151 | 162 | 158 | 145 | + |
| 7 | 342 | 331 | 355 | 350 | 318 | + |
| 10 | 908 | 897 | 942 | 926 | 831 | + |
| 12 | 1308 | 1287 | 1369 | 1341 | 1189 | + |
| 15 | 2162 | 2134 | 2355 | 2281 | 1945 | + |
| 17 | 2808 | 2779 | 2924 | 2873 | 2507 | + |
| 20 | 4229 | 4125 | 4208 | 4055 | = | |
| 22 | 5520 | 5391 | 5797 | 5655 | + | |
| 25 | 7073 | 7030 | 7519 | 7286 | + | |
| 30 | 10,928 | 10,842 | 10,947 | 10,877 | = | |
| Network | EA | ABC | MIP | Wilcoxon–Mann– | ||
|---|---|---|---|---|---|---|
| #Node | Mean | std | Mean | std | Whitney Test | |
| 5 | 14 | 0.2 | 2 | 0.1 | 11 | − |
| 7 | 26 | 0.9 | 7 | 0.2 | 121 | − |
| 10 | 76 | 1.93 | 75 | 11 | 43,200 | = |
| 12 | 132 | 3.6 | 161 | 13 | 43,200 | + |
| 15 | 317 | 4.7 | 533 | 23 | 43,200 | + |
| 17 | 440 | 8.4 | 682 | 45 | 43,200 | + |
| 20 | 1355 | 60 | 2580 | 149 | 43,200 | + |
| 22 | 1355 | 60 | 2588 | 150 | 43,200 | + |
| 25 | 2281 | 80 | 3908 | 528 | 43,200 | + |
| 30 | 4963 | 86 | 11,212 | 1213 | 43,200 | + |
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EA | Evolutionary Algorithm |
| ABC | Artificial Bee Colony |
| ES | Evolution Strategy |
| MIP | Mixed Integer Programming |
| CAPEX | Capital Expenditure |
| OPEX | Operational Expenditure |
| VRP | Vehicle Routing Problem |
| NP-hard | Non Polynomial |
| CRP | Container Relocation Problem |
| EDN | Expedition and Dispaching Node |
| PSN | Processing and Sorting Node |
| NEN | None Expedition and Processing Node |
| BLP | Basic Logistic Problem |
| ELP | Extended Logistic Problem |
| NSGA | Non-Dominated Sorting Genetic Algorithm |
| gap | difference between current best integer solution |
| and optimal value of LP relaxation | |
| CPLEX | Mixed Integer Programming solver |
| CMA-ES | Covariance Matrix Adaptation Evolution Strategy |
| DWDM | Dense Wavelength Division Multiplexing |
References
- Campelo, P.; Neves-Moreira, F.; Amorim, P.; Almada-Lobo, B. Consistent vehicle routing problem with service level agreements: A case study in the pharmaceutical distribution sector. Eur. J. Oper. Res. 2019, 273, 131–145. [Google Scholar] [CrossRef]
- ILOG. CPLEX 11.0 User’s Manual; ILOG: Paris, France, 2007. [Google Scholar]
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Hokama, P.; Miyazawa, F.K.; Xavier, E.C. A branch-and-cut approach for the vehicle routing problem with loading constraints. Expert Syst. Appl. 2016, 47, 1–13. [Google Scholar] [CrossRef]
- Chaabane, A.; Montecinos, J.; Ouhimmou, M.; Khabou, A. Vehicle routing problem for reverse logistics of End-of-Life Vehicles (ELVs). Waste Manag. 2021, 120, 209–220. [Google Scholar] [CrossRef] [PubMed]
- Garey, M.R.; Johnson, D.S. Computers and Intractability; A Guide to the Theory of NP-Completeness; W. H. Freeman & Co.: New York, NY, USA, 1990. [Google Scholar]
- Vélez-Gallego, M.C.; Teran-Somohano, A.; Smith, A.E. Minimizing late deliveries in a truck loading problem. Eur. J. Oper. Res. 2020, 286, 919–928. [Google Scholar] [CrossRef]
- Baniasadi, P.; Foumani, M.; Smith-Miles, K.; Ejov, V. A transformation technique for the clustered generalized traveling salesman problem with applications to logistics. Eur. J. Oper. Res. 2020, 285, 444–457. [Google Scholar] [CrossRef]
- Gulić, M.; Maglić, L.; Krljan, T.; Maglić, L. Solving the container relocation problem by using a metaheuristic genetic algorithm. Appl. Sci. 2022, 12, 7397. [Google Scholar] [CrossRef]
- ElWakil, M.; Gheith, M.; Eltawil, A. A new simulated annealing based method for the container relocation problem. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 1432–1437. [Google Scholar] [CrossRef]
- Rajabi-Bahaabadi, M.; Shariat-Mohaymany, A.; Babaei, M.; Ahn, C.W. Multi-objective path finding in stochastic time-dependent road networks using non-dominated sorting genetic algorithm. Expert Syst. Appl. 2015, 42, 5056–5064. [Google Scholar] [CrossRef]
- Bhusiri, N.; Qureshi, A.G.; Taniguchi, E. The trade-off between fixed vehicle costs and time-dependent arrival penalties in a routing problem. Transp. Res. Part E Logist. Transp. Rev. 2014, 62, 1–22. [Google Scholar] [CrossRef]
- Kozdrowski, S.; Żotkiewicz, M.; Wnuk, K.; Sikorski, A.; Sujecki, S. A comparative evaluation of nature inspired algorithms for telecommunication network design. Appl. Sci. 2020, 10, 6840. [Google Scholar] [CrossRef]
- Konieczka, M.; Poturała, A.; Arabas, J.; Kozdrowski, S. A modification of the PBIL algorithm inspired by the CMA-ES algorithm in discrete knapsack problem. Appl. Sci. 2021, 11, 9136. [Google Scholar] [CrossRef]
- Fourer, R.; Gay, D.M.; Kernighan, B.W. A modeling language for mathematical programming. Manag. Sci. 1990, 36, 519–554. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. Artificial Bee Colony (ABC) optimization algorithm for solving constrained optimization problems. In Proceedings of the 12th International Fuzzy Systems Association World Congress, IFSA 2007, Cancun, Mexico, 18–21 June 2007; Volume 4529, pp. 789–798. [Google Scholar] [CrossRef]
- Rey, D.; Neuhäuser, M. Wilcoxon-signed-rank test. In International Encyclopedia of Statistical Science; Lovric, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 1658–1659. [Google Scholar] [CrossRef]





| Network | EA | ABC | MIP | Wilcoxon–Mann– | ||
|---|---|---|---|---|---|---|
| #Node | Mean | Best | Mean | Best | Whitney Test | |
| 5 | 206 | 206 | 167 | 165 | 153 | − |
| 7 | 402 | 401 | 362 | 354 | 341 | − |
| 10 | 935 | 930 | 923 | 911 | 855 | = |
| 12 | 1296 | 1284 | 1325 | 1293 | 1156 | + |
| 15 | 2135 | 2104 | 2241 | 2191 | 1947 | + |
| 17 | 2746 | 2688 | 2850 | 2762 | 2489 | + |
| 20 | 4134 | 4080 | 4201 | 4054 | 3601 | + |
| 22 | 5134 | 5170 | 5111 | 5187 | 4464 | + |
| 25 | 7182 | 7262 | 7154 | 7331 | 6280 | = |
| 30 | 11,378 | 11,260 | 11,331 | 11,113 | 9379 | = |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berliński, M.; Warchulski, E.; Kozdrowski, S. Applications of Metaheuristics Inspired by Nature in a Specific Optimisation Problem of a Postal Distribution Sector. Appl. Sci. 2022, 12, 9384. https://doi.org/10.3390/app12189384
Berliński M, Warchulski E, Kozdrowski S. Applications of Metaheuristics Inspired by Nature in a Specific Optimisation Problem of a Postal Distribution Sector. Applied Sciences. 2022; 12(18):9384. https://doi.org/10.3390/app12189384
Chicago/Turabian StyleBerliński, Michał, Eryk Warchulski, and Stanisław Kozdrowski. 2022. "Applications of Metaheuristics Inspired by Nature in a Specific Optimisation Problem of a Postal Distribution Sector" Applied Sciences 12, no. 18: 9384. https://doi.org/10.3390/app12189384
APA StyleBerliński, M., Warchulski, E., & Kozdrowski, S. (2022). Applications of Metaheuristics Inspired by Nature in a Specific Optimisation Problem of a Postal Distribution Sector. Applied Sciences, 12(18), 9384. https://doi.org/10.3390/app12189384