
One Novel Dynamic-Load Time-Domain-Identification Method Based on Function Principle



Abstract
:1. Introduction
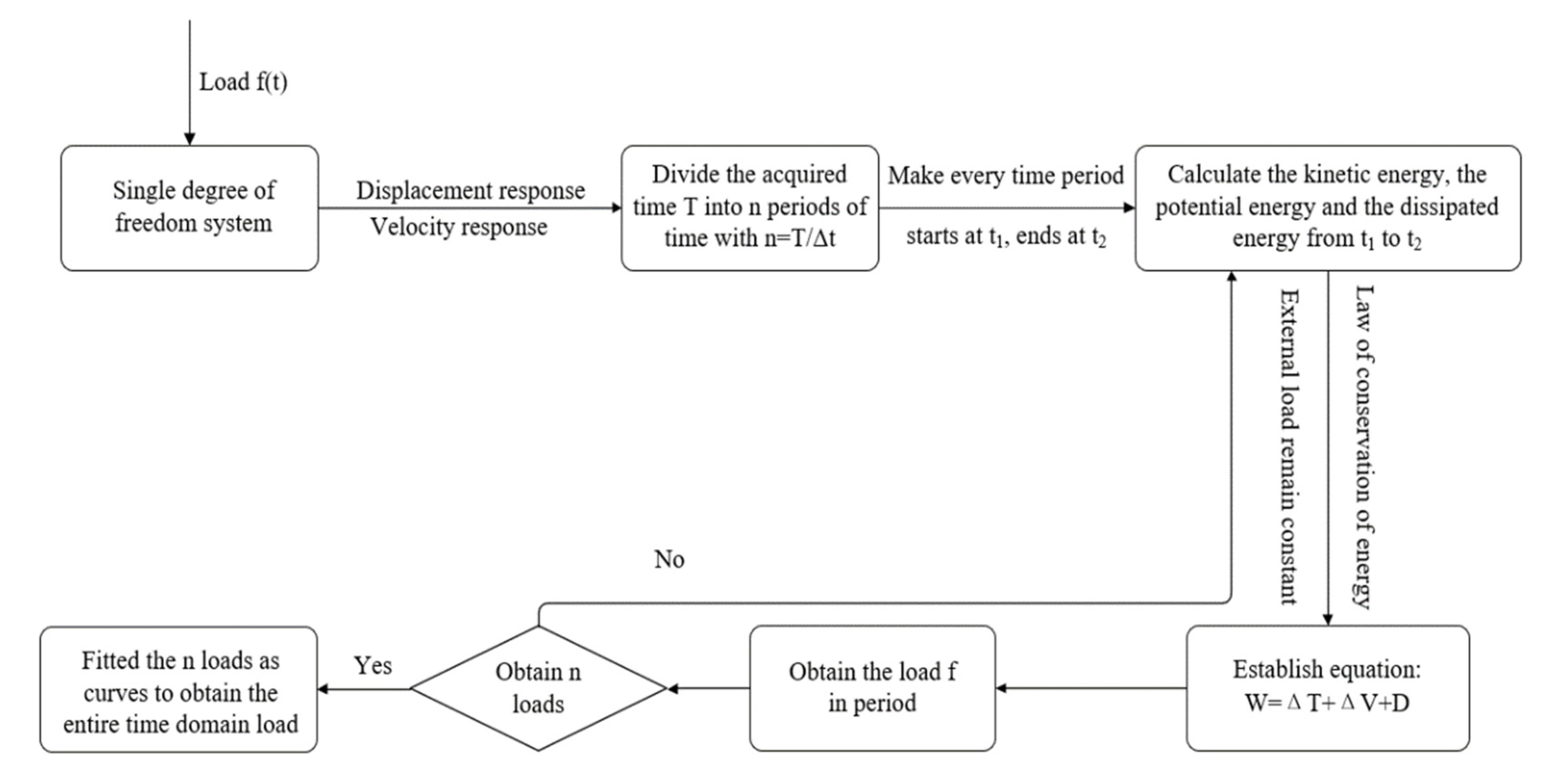
2. Function Principle Dynamic Load Identification Method
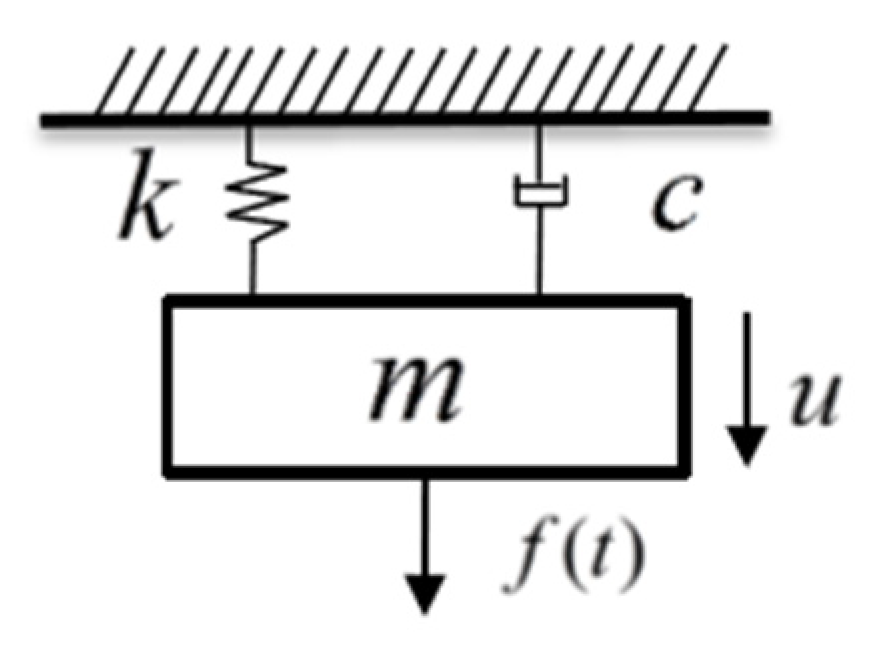
2.1. Time-Domain Identification Method of Dynamic Load Based on Function Principle for Single-Degree-of-Freedom System
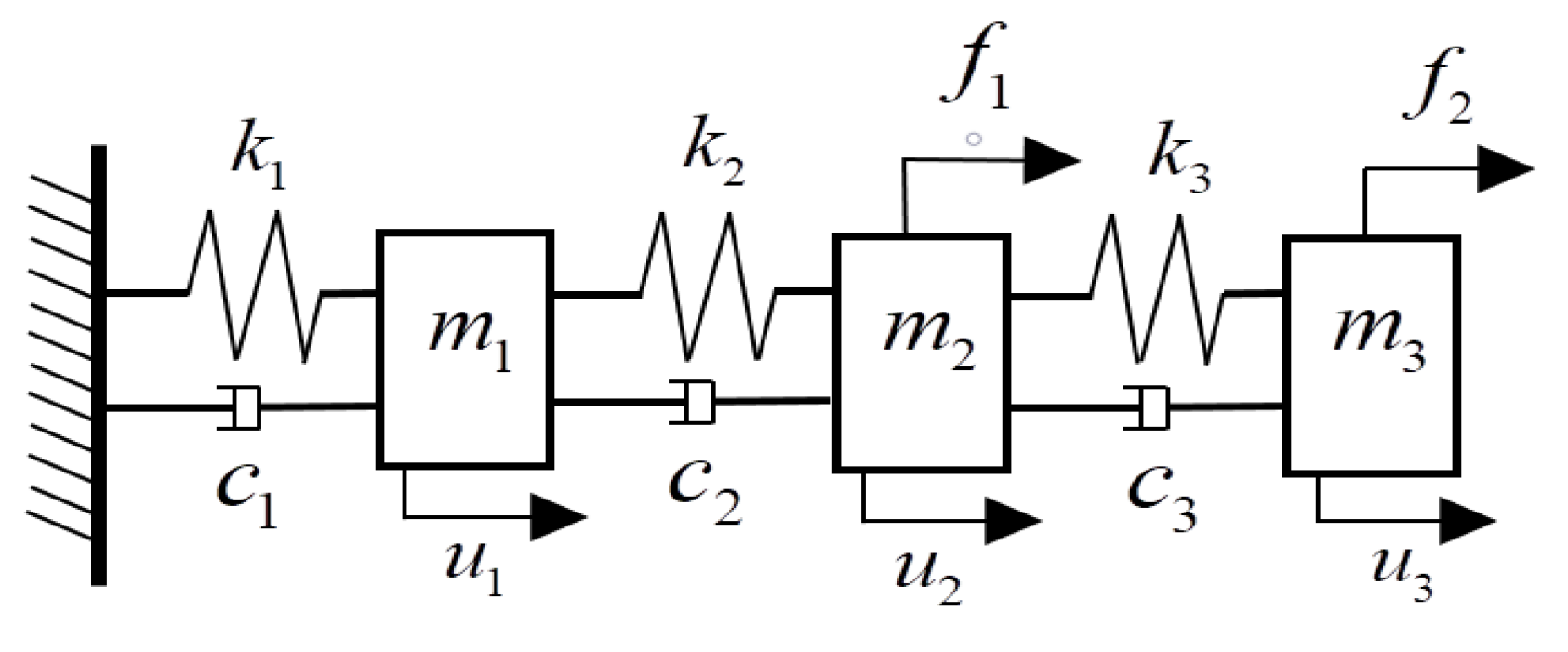
2.2. Time-Domain Identification Method of Multi-Point Dynamic Loads Based on Function Principle for Multiple-Degree-of-Freedom System
3. Simulation Example
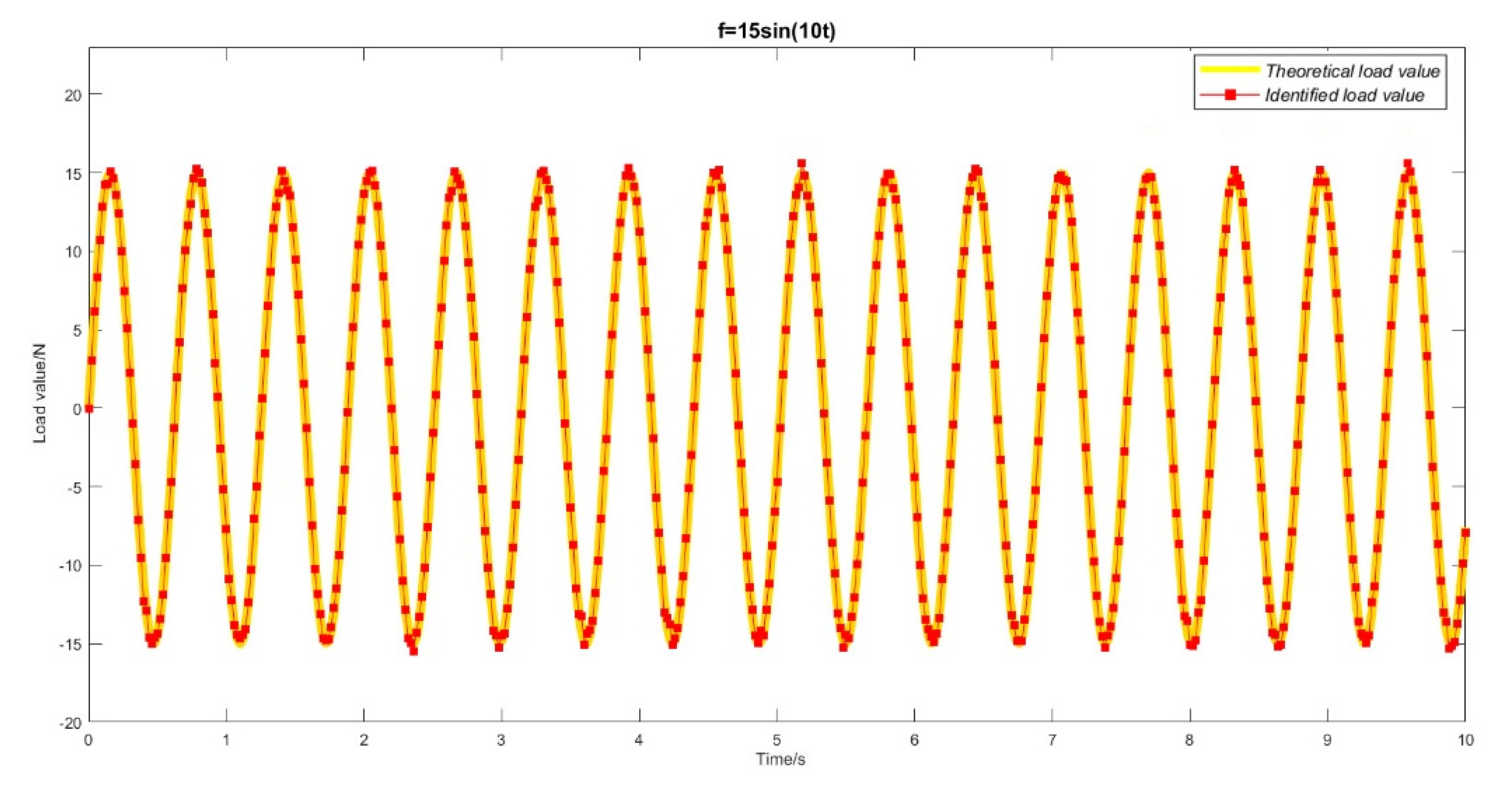
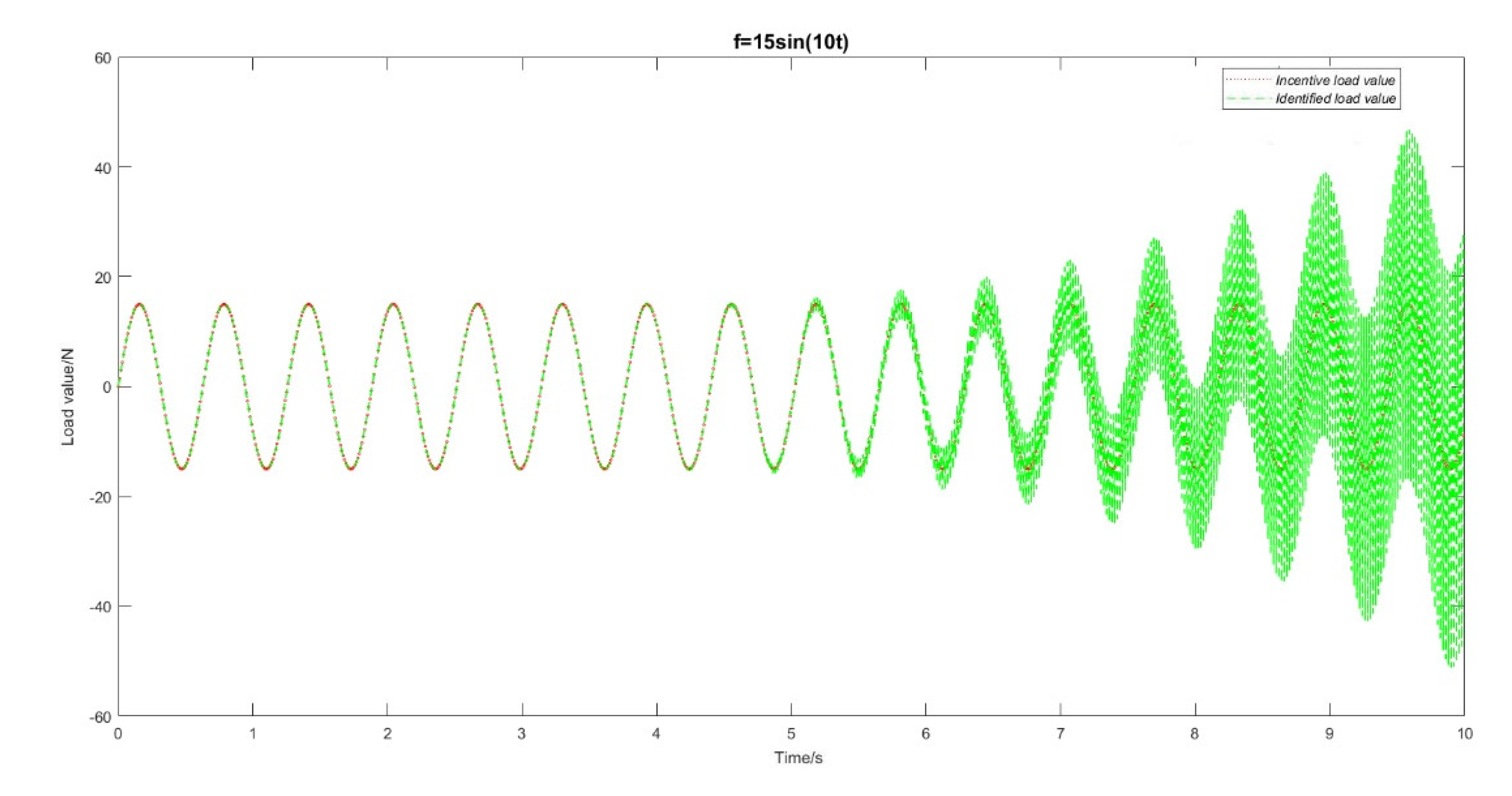
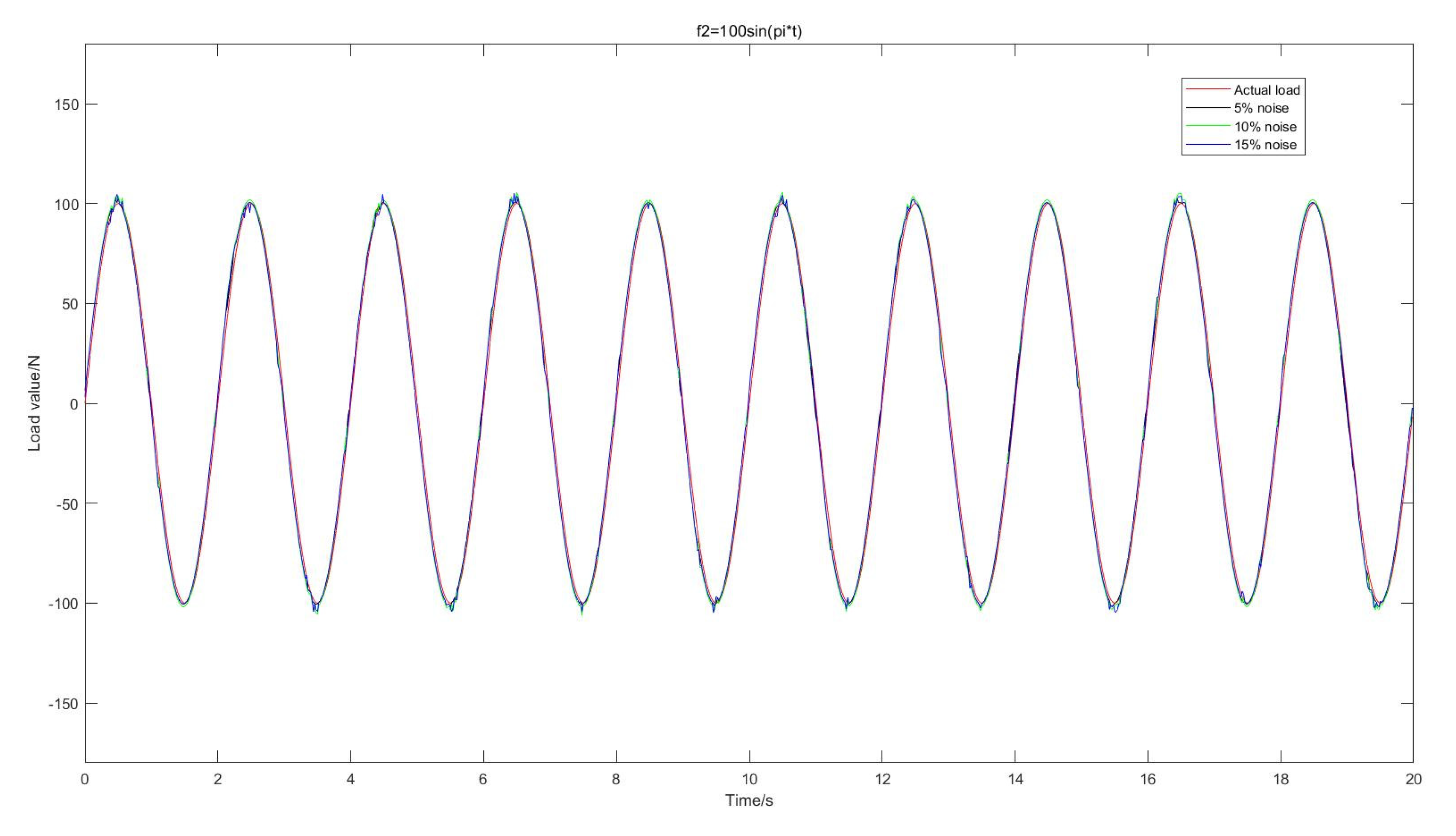
3.1. Example 1: Single-Degree-of-Freedom System
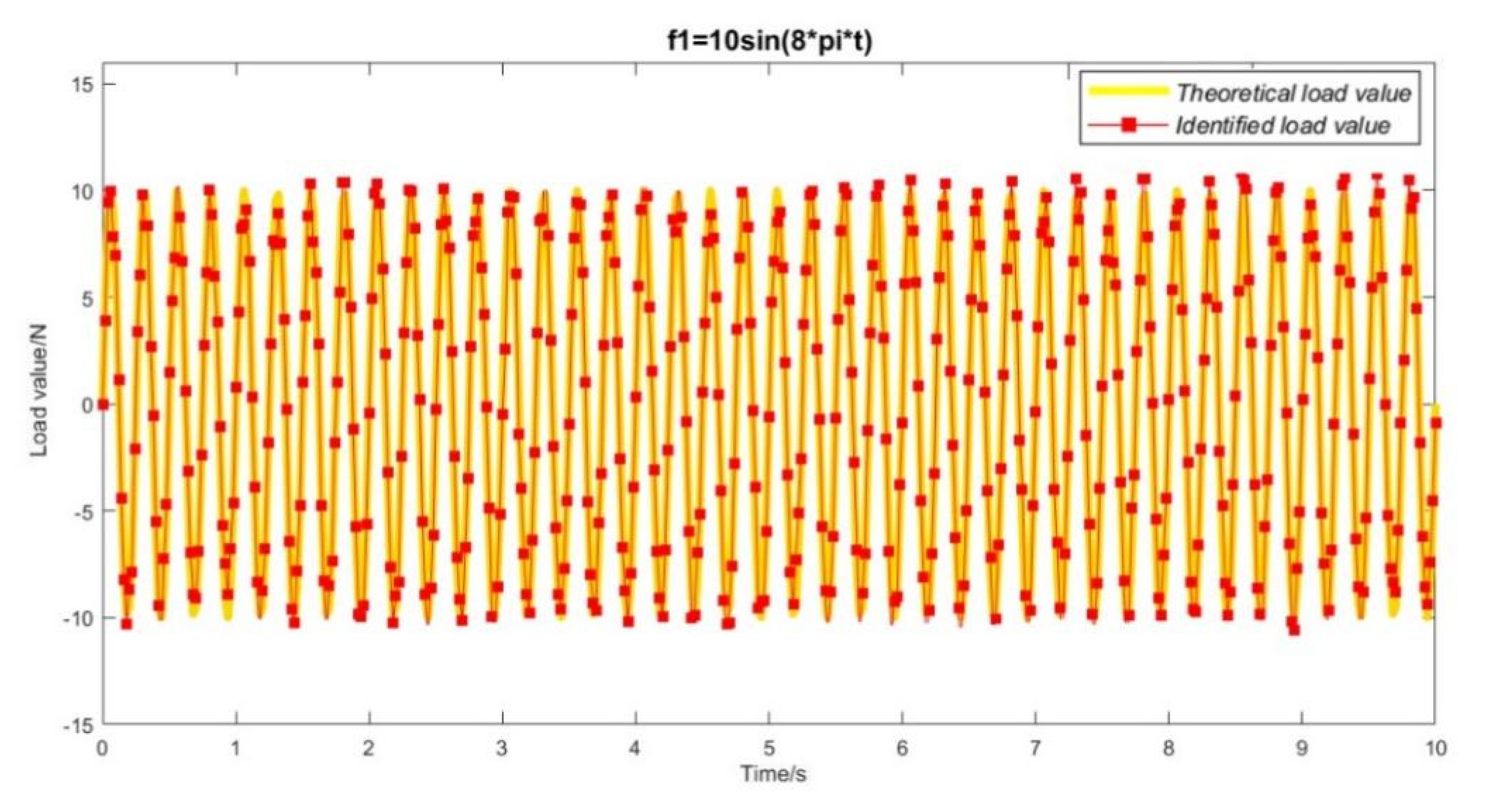
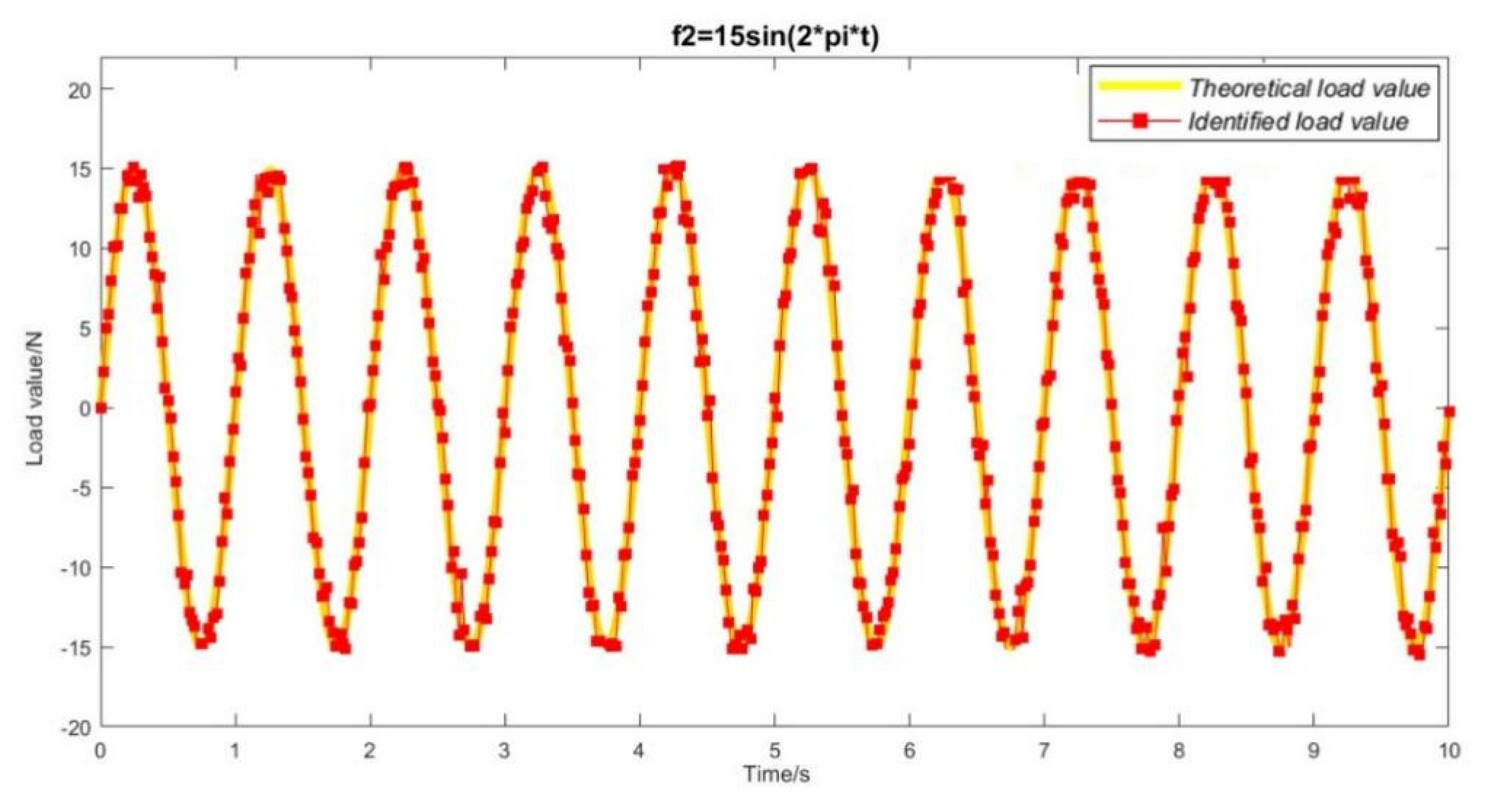
3.2. Multiple-Degree-of-Freedom System
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, Z.; You, J. Identification Method of Dynamic Loads. J. Adv. Mech. 2015, 45, 29–54. [Google Scholar]
- Qin, Y. Research on Application Technology of Dynamic Load Identification. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2007. [Google Scholar]
- Yang, Z.; You, Y. Research Progress of Dynamics Load Identification Method. Chin. J. Theor. Appl. Mech. 2015, 47, 384. [Google Scholar]
- Hu, Y. Research on Load Identification Method Based on Least Square in Frequency Domain and Its Application. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2011. [Google Scholar]
- Hu, J.; Zhang, X. An Optimization Method of Load Identification in Frequency Domain. J. Noise Vib. Control 2009, 29, 34–36. [Google Scholar]
- Qin, Y. A Frequency Method: Two-dimension Distributed Load Identification. In Chinese Society of Theoretical and Applied Mechanics, Chinese Society of Vibration Engineering, Chinese Society of Aeronautics and Astronautics, Chinese Mechanical Engineering Society, Chinese Society of Astronautics. Abstract of Papers of the 9th National Conference on Vibration Theory and Application, Hangzhou, China, 17–19 October 2007; Chinese Society For Vibration Engineering: Nanjing, China, 2007; p. 2. [Google Scholar]
- Zhou, P.; Zhang, Q.; Shuai, Z.; Li, W. Review of Research and Development Status of Dynamic Load Identification in Time Domain. J. Noise Vib. Control 2014, 34, 6–11. [Google Scholar]
- Ma, X. Research of Some Issues of Dynamic Load Location Identification in Time Domain. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2012. [Google Scholar]
- Mao, Y. The Theoretical Approach and Experimental Study on the Inverse Problem of Dynamic Force Identification in Time Domain. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2010. [Google Scholar]
- Jiang, J.; Luo, S.; Zhang, F. One novel dynamical calibration method to identify two-dimensional distributed load. J. Sound Vib. 2021, 515, 116465. [Google Scholar] [CrossRef]
- Ory, H.; Glaser, H.; Holzdeppe, D. The Reconstruction of Forcing Function Based on Measured Structural Responses. In Proceedings of the 2nd International Symposium on Aeroelasticity and Structural Dynamics, Aachen, Germany, 1–3 April 1985. [Google Scholar]
- Kreitinger, T.; Luo, H.L. Force Identification from Structural Response. In Proceedings of the 1987 SEM Spring Conference, Houston, TX, USA, 14–19 June 1987; pp. 851–855. [Google Scholar]
- Lu, D.; Wu, M. Study on SWAT Method for Dynamic Load Identification. J. Vib. Impact 1999, 18, 78–82. [Google Scholar]
- Chen, L.; Zhou, H. Weighted Acceleration Method of Dynamic Load Identification. J. Noise Vib. Control 2002, 14–16. [Google Scholar]
- Doyle, J.F. A Wavelet Deconvolution Method for Impact Force Identification. J. Exp. Mech. Exp. Mech. 1997, 37, 403–408. [Google Scholar] [CrossRef]
- Cheng, L.; Song, Z.; Wang, Z.; Ma, H. Impact Force Identification Based on Wavelet Deconvolution. J. Jinan Univ. (Nat. Sci. Ed.) 2008, 29, 443–446. [Google Scholar]
- Gunawan, F.E.; Homma, H.; Kanto, Y. Two-step B-splines Regularization Method for Solving an Ill-posed Problem of Impact Force Reconstruction. J. Sound Vib. 2006, 297, 200–214. [Google Scholar] [CrossRef]
- Hu, N.; Fukunaga, H.; Matsumoto, S.; Yan, B.; Peng, X.H. An Efficient Approach for Identifying Impact Force Using Embedded Piezoelectric Sensors. Int. J. Impact Eng. 2007, 34, 1258–1271. [Google Scholar] [CrossRef]
- Gunawan, F.E.; Homma, H.; Morisawa, Y. Impact Force Estimation by Quadratic Spline Approximation. J. Solid Mech. Mater. Eng. 2008, 2, 1092–1103. [Google Scholar] [CrossRef]
- Mao, Y.; Guo, X. Experiment Study on Dynamic Force Identification by a Parameter Estimation Method. In Proceedings of the SEM Annual Conference, Albuquerque, NM, USA, 1–4 June 2009; pp. 1–4. [Google Scholar]
- Guo, X.; Mao, Y.; Zhao, Y. Research on Load Identification Based on Markov Parameter Precise Integration Method. J. Vib. Impact 2009, 28, 27–30. [Google Scholar]
- Jiang, J.; Seaid, M.; Mohamed, M.S. Inverse algorithm for real-time road roughness estimation for autonomous vehicles. Arch. Appl. Mech. 2020, 90, 1333–1348. [Google Scholar] [CrossRef]
- Hand, L.; Finch, J. Analytical Mechanics; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Jiang, J.; Ding, M.; Li, J. A novel time-domain dynamic load identification numerical algorithm for continuous systems. Mech. Syst. Signal Process. 2021, 160, 107881. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
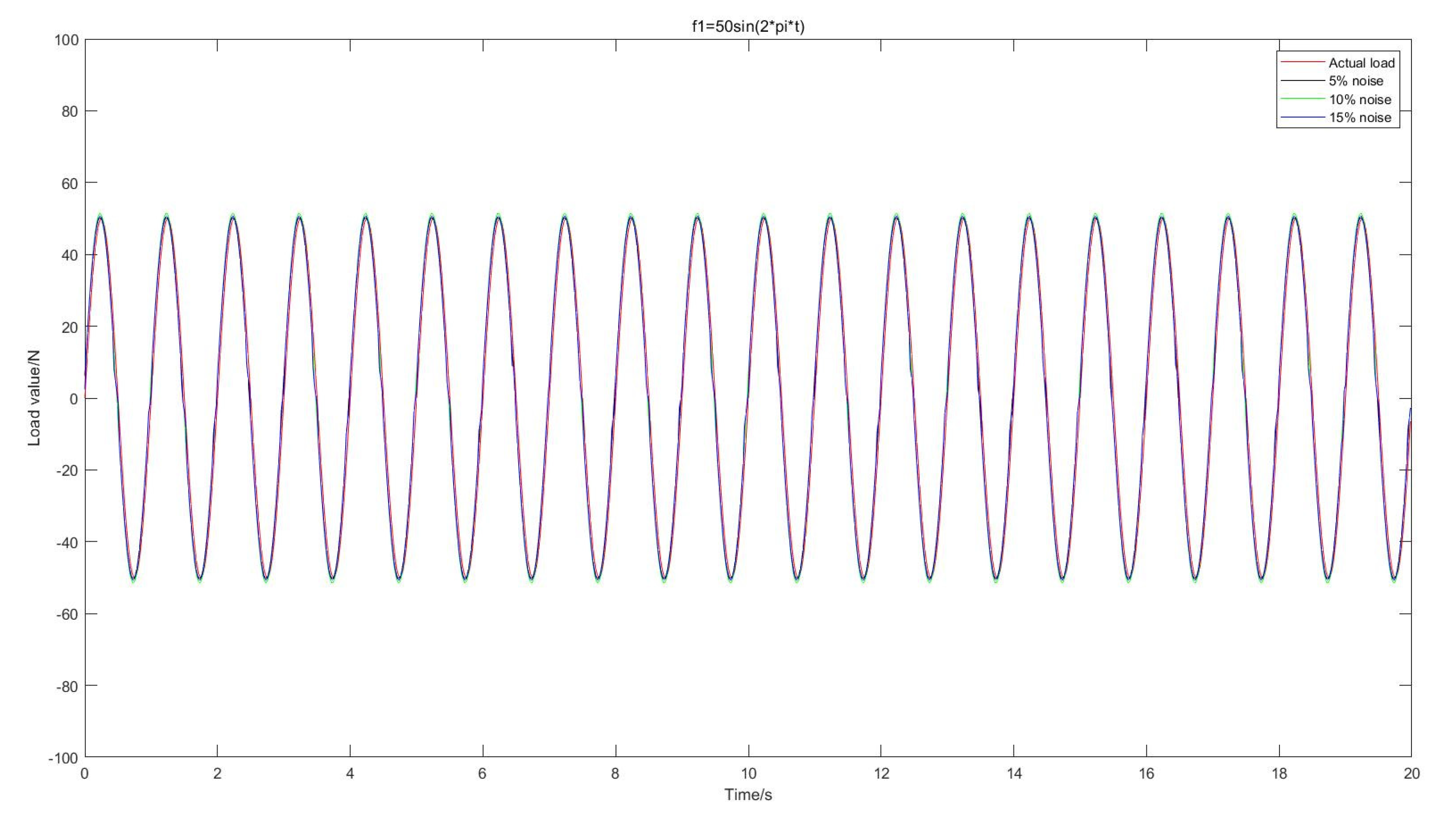
| Noise Level | 5% | 10% | 15% |
|---|---|---|---|
| f1 | 1.43% | 2.02% | 3.72% |
| f2 | 2.48% | 3.28% | 4.12% |
| 0.5 | 0.02 | 0.002 | 200 |
| Equipment Type | Model |
|---|---|
| Exciter | Labworks LW161.138 |
| Displacement laser sensors | OptoNCDT 2310 |
| Velocity laser sensors | Polytec PDV-100 |
| Force sensors | PCB 208C03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Jiang, J.; Cui, W.; Zhao, J.; Mohamed, M.S. One Novel Dynamic-Load Time-Domain-Identification Method Based on Function Principle. Appl. Sci. 2022, 12, 9623. https://doi.org/10.3390/app12199623
Li H, Jiang J, Cui W, Zhao J, Mohamed MS. One Novel Dynamic-Load Time-Domain-Identification Method Based on Function Principle. Applied Sciences. 2022; 12(19):9623. https://doi.org/10.3390/app12199623
Chicago/Turabian StyleLi, Hongqiu, Jinhui Jiang, Wenxu Cui, Jiamin Zhao, and M. Shadi Mohamed. 2022. "One Novel Dynamic-Load Time-Domain-Identification Method Based on Function Principle" Applied Sciences 12, no. 19: 9623. https://doi.org/10.3390/app12199623