
Battery Energy Storage Participation in Automatic Generation Control of Island Systems, Coordinated with State of Charge Regulation


Abstract
:1. Introduction
2. Frequency and Active Power Control Schemes
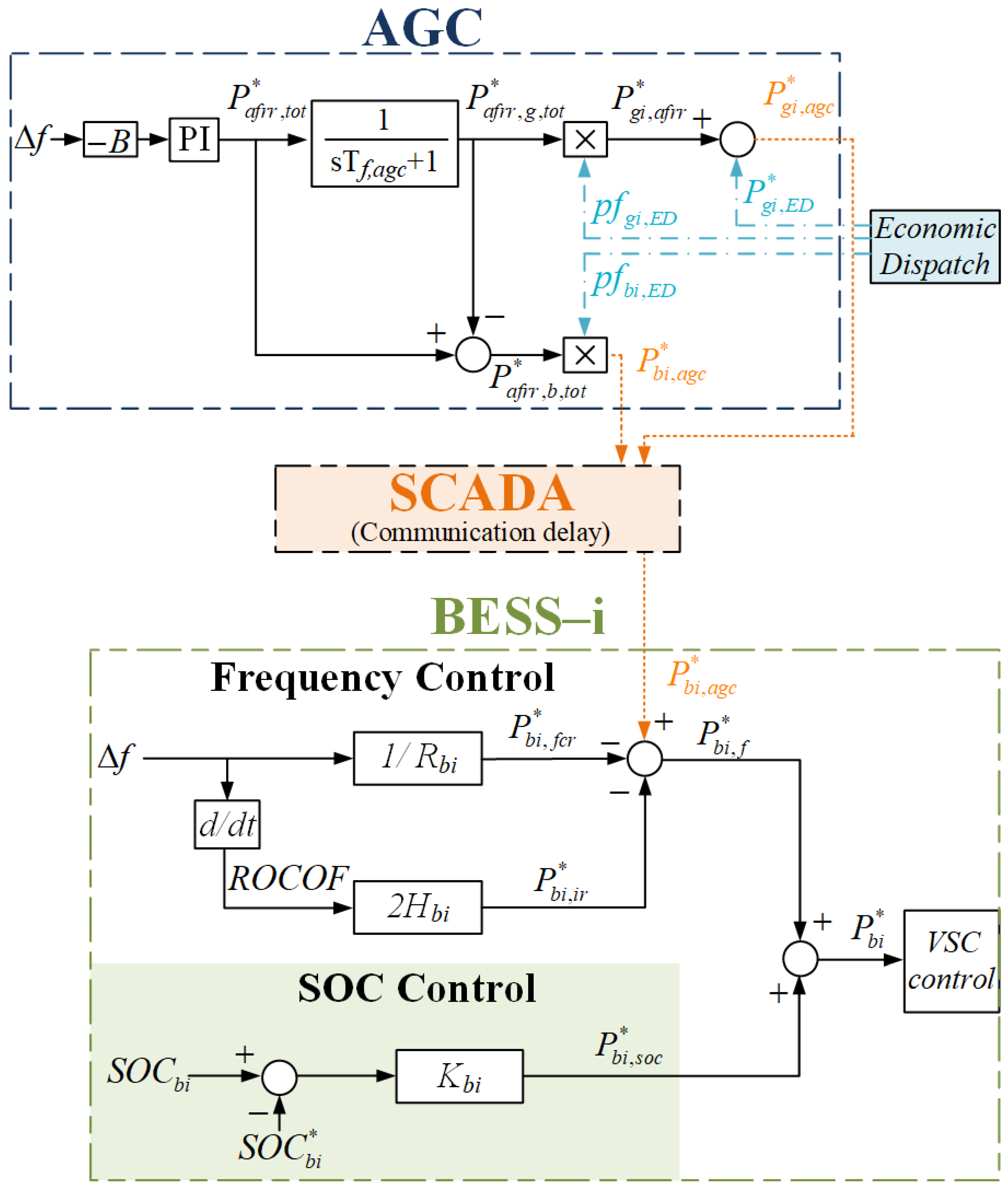
2.1. Proposed Method
2.2. Alternative aFRR Participation Methods for BESS
2.2.1. Filter-Based AGC
2.2.2. BAU SOC Control
2.2.3. SOC Control with No AGC Communication
3. Economic Dispatch Process
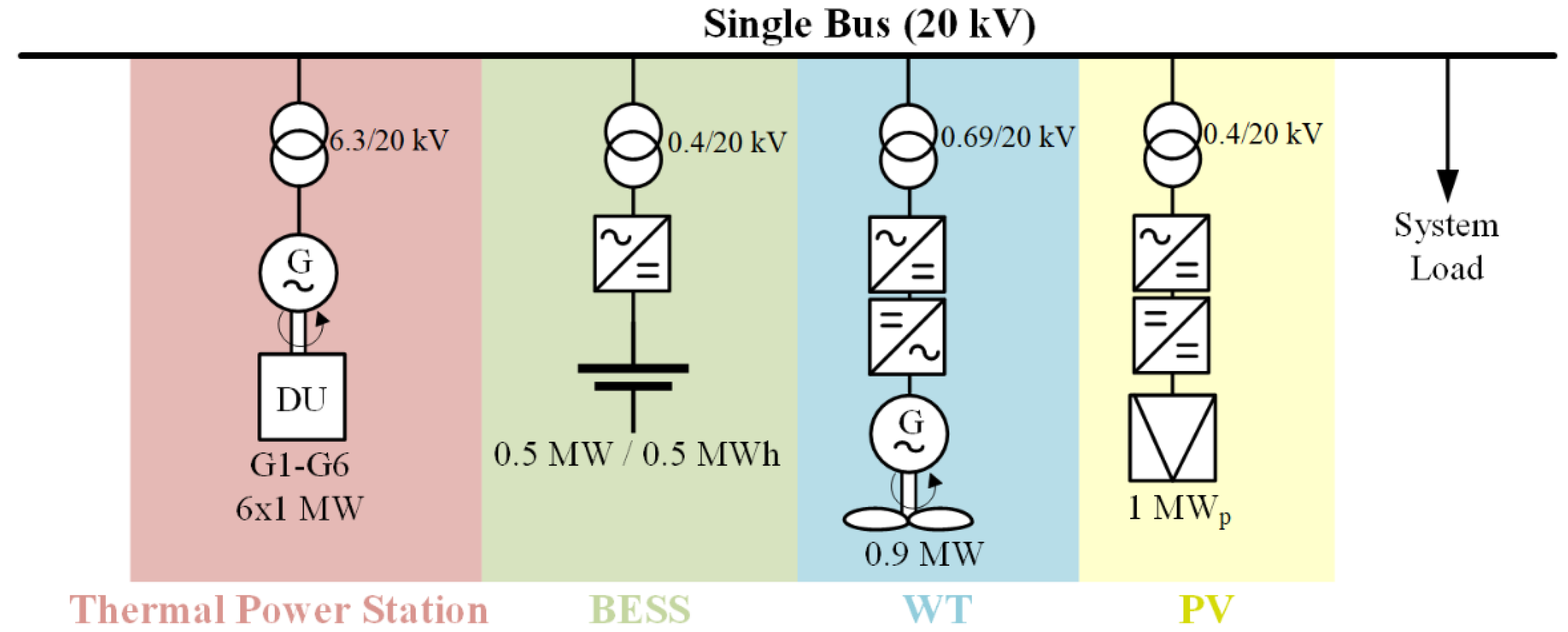
4. Study Case System
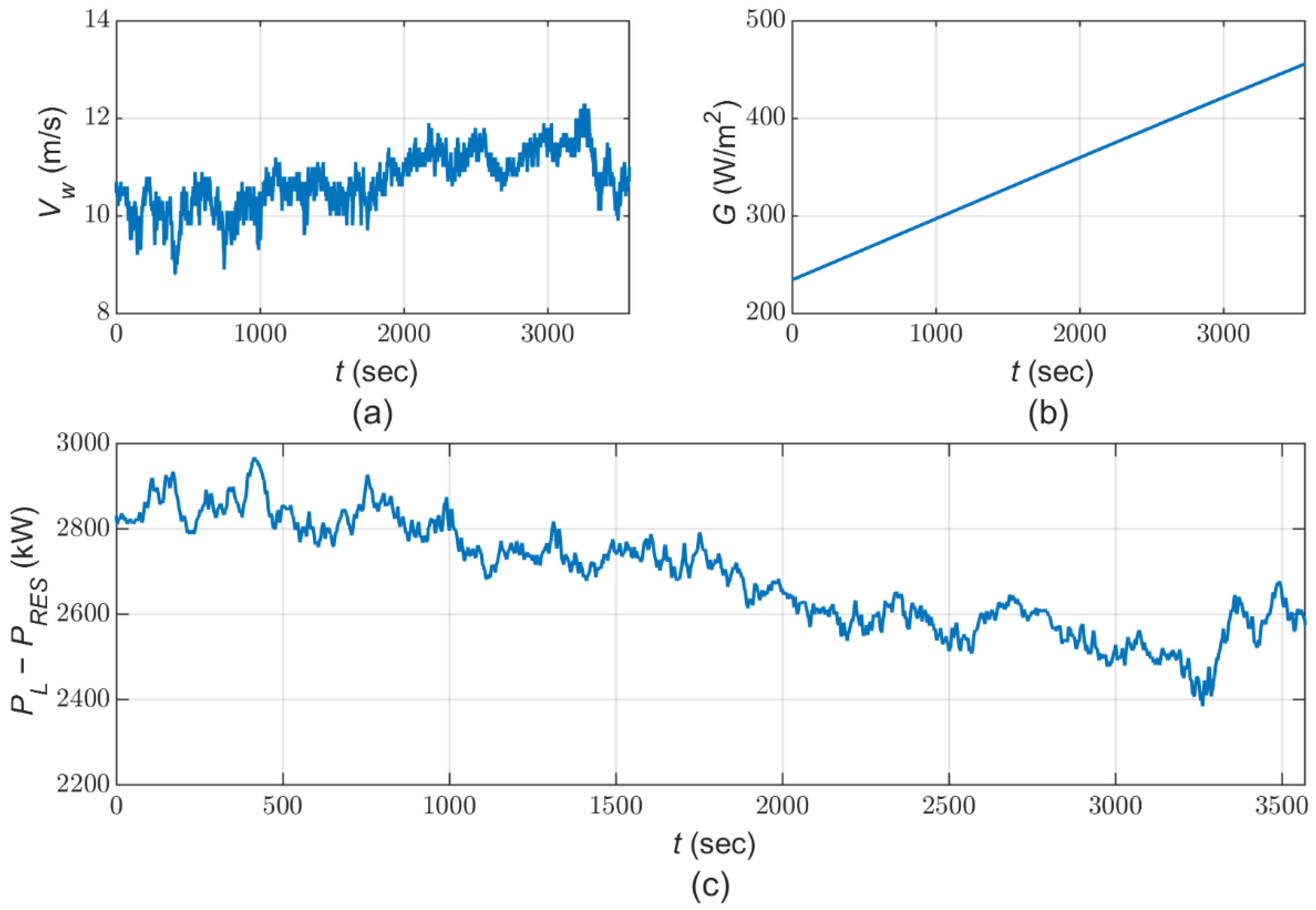
5. Simulation Results
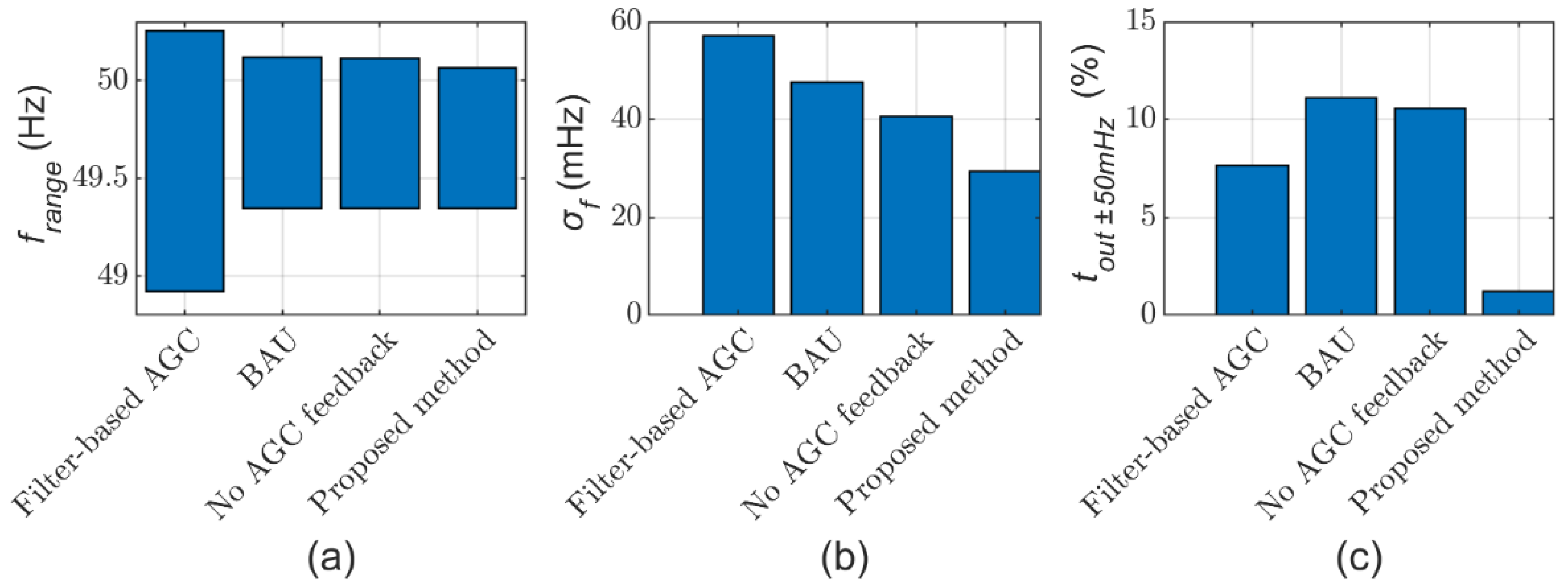
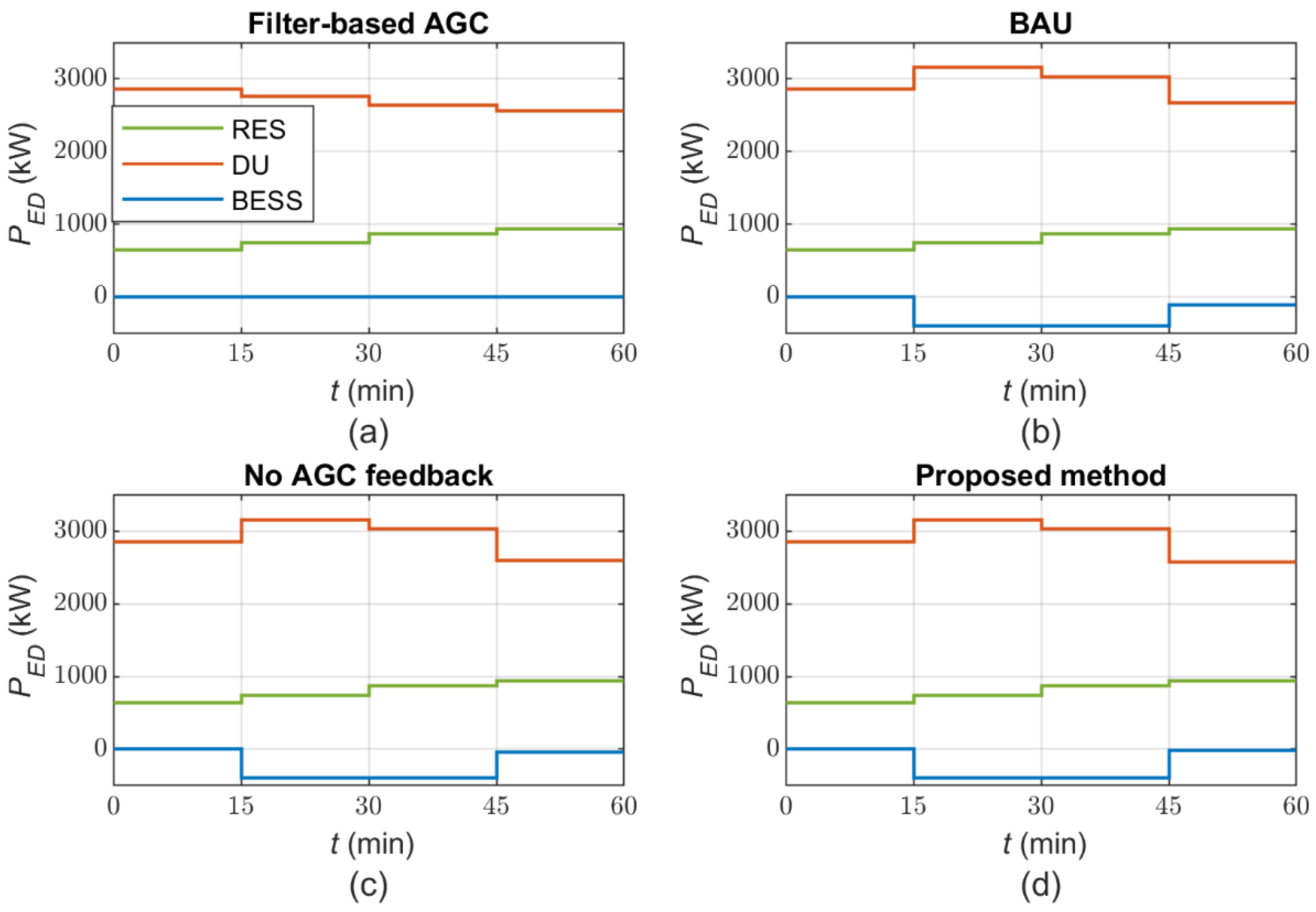
5.1. Comperative Assesment of Different Power Control Schemes
- (i)
- Filter-based AGC (Section 2.2.1)—red dash-dotted line.
- (ii)
- BAU SOC control (Section 2.2.2)—orange dotted line.
- (iii)
- SOC control with no AGC feedback (Section 2.2.3)—green dashed line.
- (iv)
- Proposed method (Section 2.1)—blue continuous line.
- Present applications in systems with multiple BESS units, operated independently or in portfolios. For the case of BESS portfolios, modification of the proposed method is necessary to aggregate all units in a single virtual entity, using its total active power and equivalent SOC for control purposes.
- Address operating conditions with no on-line thermal units, where the system relies solely on RESs and storage, including conditions of 100% inverter-based resources.
- Accommodate more sophisticated market functionalities in the economic dispatch module and address the case of larger storages, performing energy arbitrage alongside balancing.
5.2. Parametric Evaluation of the Proposed Method
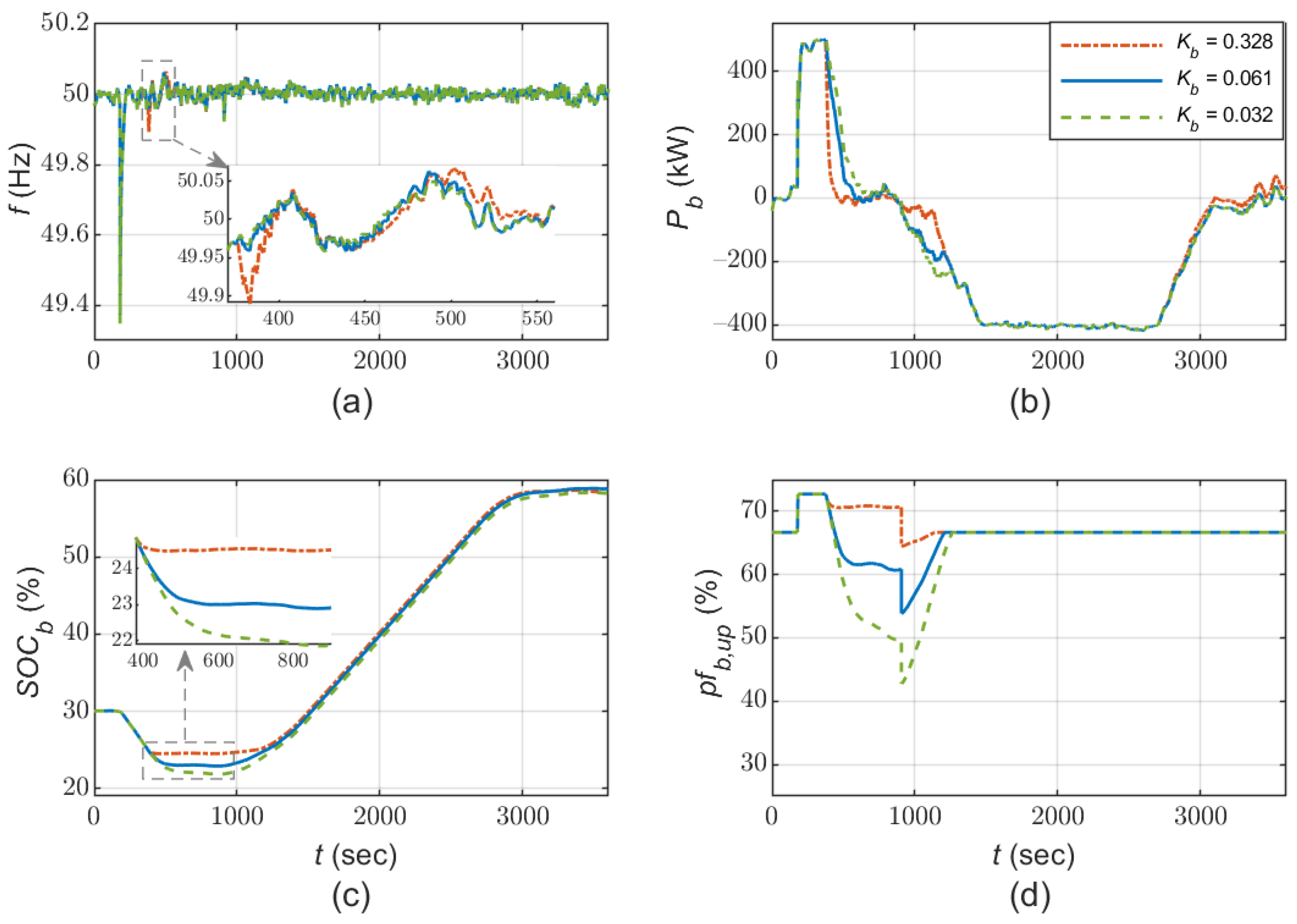
5.2.1. Kb Gain
5.2.2. SOC Activation Zone Range
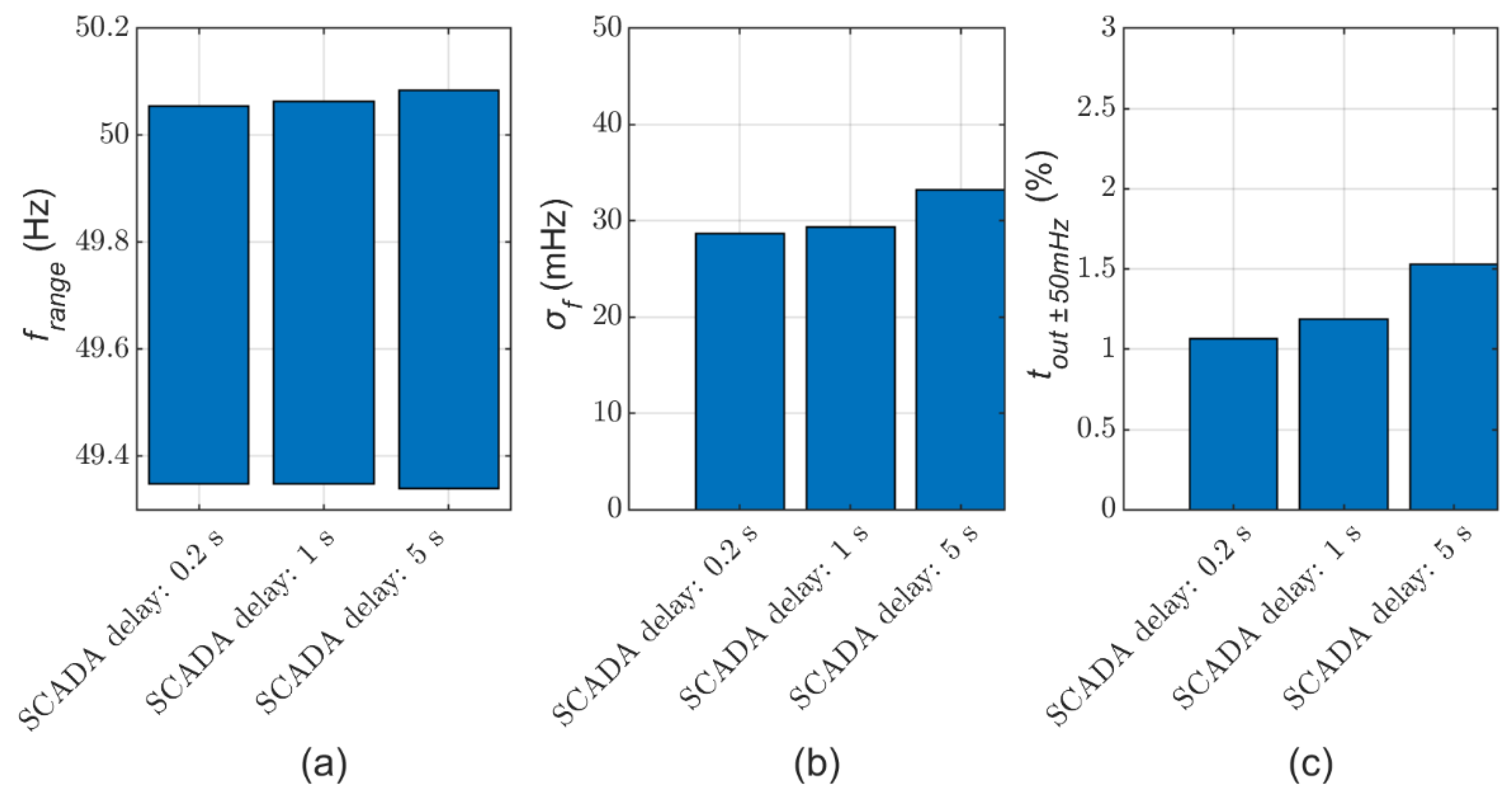
5.2.3. AGC Communication Delay
6. Conclusions
Author Contributions
Funding

Conflicts of Interest
Appendix A. Economic Dispatch and Frequency Control Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| ED time interval | Δt | 0.25 h |
| Set of available DUs | G | {G1–6} |
| Maximum capacity of each DU | 1 MW | |
| Minimum loading (technical minimum) of each DU | 0.5 MW | |
| BESS maximum charge/discharge power | 0.5 MW | |
| BESS energy capacity | 0.5 MWh | |
| SOC reference | 55% | |
| BESS charge/discharge efficiency | 0.92 | |
| Variable cost of each DU | 100 €/MWh | |
| SOC limit violation cost | 200 €/MWh | |
| Downward reserve violation cost | 4000 €/MWh | |
| Upward reserve violation cost | 8000 €/MWh | |
| Energy equilibrium violation cost | 20,000 €/MWh |
| Parameter | Symbol | Value |
|---|---|---|
| DU type | 4-stroke | |
| DU droop coefficient | 5% | |
| DU inertia constant | 2.5 s | |
| DU active power rate limiter | 0.3 pu/s | |
| DU AGC dispatch order rate limiter | 0.02 pu/s | |
| PV capacity | 1 MWp | |
| WT capacity | 0.9 MW | |
| BESS frequency measurement dead band | 0.01 Hz | |
| BESS droop coefficient | 2% | |
| BESS ROCOF measurement filter time constant | 0.05 s | |
| BESS ROCOF measurement dead band | 0.05 Hz/s | |
| BESS inertia constant | 3 s | |
| Lower limit of minimum SOC control activation zone | 20% | |
| Upper limit of minimum SOC control activation zone | 25% | |
| Lower limit of maximum SOC control activation zone | 85% | |
| Upper limit of maximum SOC control activation zone | 90% | |
| Minimum SOC for BAU SOC control | 22.5% | |
| Maximum SOC for BAU SOC control | 87.5% | |
| SOC control gain | 0.0615 | |
| BESS active power rate limiter | 10 pu/s | |
| BESS AGC dispatch order and SOC controller power reference rate limiter | 0.1 pu/s | |
| PI gains of BESS current controller | (0.1,5) | |
| DU AGC time constant in filter-based AGC | 60 s | |
| PI gains of AGC | (0.005,0.05) | |
| AGC cycle | 4 s | |
| SCADA communication delay | 1 s |
References
- European Commission. Study on Energy Storage—Contribution to the Security of the Electricity Supply in Europe; European Commission: Brussels, Belgium, 2020. [Google Scholar]
- Electricity Storage Valuation Framework: Assessing System Value and Ensuring Project Viability; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2020.
- Iris, Ç.; Lam, J.S.L. Optimal energy management and operations planning in seaports with smart grid while har-nessing renewable energy under uncertainty. Omega 2021, 103, 102445. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Margaris, I.; Stavropoulou, I.; Papathanassiou, S.; Dimeas, A. Noninterconnected Island Systems: The Greek Case. IEEE Electrif. Mag. 2017, 5, 17–27. [Google Scholar] [CrossRef]
- Psarros, G.N.; Papakonstantinou, A.G.; Papathanassiou, S.A. Integration of storage into large island power systems: The case of Cyprus. In Proceedings of the 12th Mediterranean Conference on Power Generation, Transmission, Distribution and Energy Conversion (MEDPOWER 2020), Paphos, Cyprus, 9–12 November 2020; Institution of Engineering and Technology (IET): London, UK, 2021; pp. 270–275. [Google Scholar]
- Psarros, G.N.; Karamanou, E.G.; Papathanassiou, S.A. Feasibility Analysis of Centralized Storage Facilities in Isolated Grids. IEEE Trans. Sustain. Energy 2018, 9, 1822–1832. [Google Scholar] [CrossRef]
- Psarros, G.N.; Kokkolios, S.P.; Papathanassiou, S.A. Centrally Managed Storage Facilities in Small Non-Interconnected Island Systems. In Proceedings of the 2018 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–6. [Google Scholar]
- Psarros, G.N.; Papakonstantinou, A.G.; Papathanassiou, S.A.; Anagnostopoulos, J.S.; Boulaxis, N.G. Contribution of energy storage to capacity adequacy—Application to island power systems. In Proceedings of the 48th CIGRE Sess, Paris, France, 23–28 August 2020; pp. 1–11. [Google Scholar]
- Dratsas, P.A.; Psarros, G.N.; Papathanassiou, S.A. Battery Energy Storage Contribution to System Adequacy. Energies 2021, 14, 5146. [Google Scholar] [CrossRef]
- Meng, L.; Zafar, J.; Khadem, S.K.; Collinson, A.; Murchie, K.C.; Coffele, F.; Burt, G.M. Fast Frequency Response From Energy Storage Systems—A Review of Grid Standards, Projects and Technical Issues. IEEE Trans. Smart Grid 2019, 11, 1566–1581. [Google Scholar] [CrossRef] [Green Version]
- Kundur, P. Power System Stability and Control; McGraw-Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
- Wood, A.J.; Wollenberg, B.F.; Sheble, G.B. Power Generation, Operation, and Control, 3rd ed.; John Wiley & Sons Inc.: New Jersey, NJ, USA, 2013. [Google Scholar]
- Lazard’s Levelized Cost of Storage Analysis—Version 7.0; Lazard: Hamilton, Bermuda, 2021; Available online: https://www.lazard.com/media/451882/lazards-levelized-cost-of-storage-version-70-vf.pdf (accessed on 4 December 2021).
- Stroe, D.-I.; Knap, V.; Swierczynski, M.J.; Stroe, A.-I.; Teodorescu, R. Operation of a Grid-Connected Lithium-Ion Battery Energy Storage System for Primary Frequency Regulation: A Battery Lifetime Perspective. IEEE Trans. Ind. Appl. 2017, 53, 430–438. [Google Scholar] [CrossRef]
- Aznavi, S.; Fajri, P.; Sabzehgarm, R.; Asrari, A. Optimal management of residential energy storage systems in presence of intermittencies. J. Build. Eng. 2020, 29, 101149. [Google Scholar] [CrossRef]
- Hartmann, B.; Divényi, D.; Vokony, I. Evaluation of business possibilities of energy storage at commercial and industrial consumers—A case study. Appl. Energy 2018, 222, 59–66. [Google Scholar] [CrossRef]
- Del Granado, P.C.; Pang, Z.; Wallace, S.W. Synergy of smart grids and hybrid distributed generation on the value of energy storage. Appl. Energy 2016, 170, 476–488. [Google Scholar] [CrossRef] [Green Version]
- Iris, Ç.; Lam, J.S.L. A review of energy efficiency in ports: Operational strategies, technologies and energy management systems. Renew. Sustain. Energy Rev. 2019, 112, 170–182. [Google Scholar] [CrossRef]
- Moura, S.J.; Callaway, D.S.; Fathy, H.K.; Stein, J.L. Tradeoffs between battery energy capacity and stochastic optimal power management in plug-in hybrid electric vehicles. J. Power Sources 2010, 195, 2979–2988. [Google Scholar] [CrossRef]
- Margaris, I.D.; Papathanassiou, S.A.; Hatziargyriou, N.D.; Hansen, A.D.; Sørensen, P.E. Frequency Control in Autonomous Power Systems With High Wind Power Penetration. IEEE Trans. Sustain. Energy 2012, 3, 189–199. [Google Scholar] [CrossRef]
- Papaefthymiou, S.V.; Lakiotis, V.G.; Margaris, I.D.; Papathanassiou, S.A. Dynamic analysis of island systems with wind-pumped-storage hybrid power stations. Renew. Energy 2015, 74, 544–554. [Google Scholar] [CrossRef]
- Nanou, S.I.; Papakonstantinou, A.G.; Papathanassiou, S.A. A generic model of two-stage grid-connected PV systems with primary frequency response and inertia emulation. Electr. Power Syst. Res. 2015, 127, 186–196. [Google Scholar] [CrossRef]
- Bevrani, H.; Golpîra, H.; Messina, A.R.; Hatziargyriou, N.; Milano, F.; Ise, T. Power system frequency control: An updated review of current solutions and new challenges. Electr. Power Syst. Res. 2021, 194, 107114. [Google Scholar] [CrossRef]
- Karapanos, V.; Kotsampopoulos, P.; Hatziargyriou, N. Performance of the linear and binary algorithm of virtual synchronous generators for the emulation of rotational inertia. Electr. Power Syst. Res. 2015, 123, 119–127. [Google Scholar] [CrossRef]
- Serban, I.; Marinescu, C. Control Strategy of Three-Phase Battery Energy Storage Systems for Frequency Support in Microgrids and with Uninterrupted Supply of Local Loads. IEEE Trans. Power Electron. 2013, 29, 5010–5020. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Lin, J. Decentralized Vehicle-to-Grid Control for Primary Frequency Regulation Considering Charging Demands. IEEE Trans. Power Syst. 2013, 28, 3480–3489. [Google Scholar] [CrossRef]
- Akram, U.; Khalid, M.; Shafiq, S. A Novel Operation Strategy of Battery-Supercapacitor Hybrid Energy Storage System Providing Frequency Regulation Service. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2018; pp. 31–36. [Google Scholar]
- Xu, X.; Bishop, M.; Oikarinen, D.G.; Hao, C. Application and modeling of battery energy storage in power systems. CSEE J. Power Energy Syst. 2016, 2, 82–90. [Google Scholar] [CrossRef]
- Greenwood, D.; Lim, K.; Patsios, C.; Lyons, P.; Lim, Y.; Taylor, P. Frequency response services designed for energy storage. Appl. Energy 2017, 203, 115–127. [Google Scholar] [CrossRef]
- Tan, Z.; Li, X.; He, L.; Li, Y.; Huang, J. Primary frequency control with BESS considering adaptive SoC recovery. Int. J. Electr. Power Energy Syst. 2020, 117, 105588. [Google Scholar] [CrossRef]
- Boyle, J.; Littler, T.; Foley, A. Battery energy storage system state-of-charge management to ensure availability of frequency regulating services from wind farms. Renew. Energy 2020, 160, 1119–1135. [Google Scholar] [CrossRef]
- Commission Regulation (EU) 2017/2195 of 23 November 2017 establishing a guideline on electricity balancing. Off. J. Eur. Union 2017, 312, 6–53.
- Brouwer, A.S.; van den Broek, M.; Seebregts, A.; Faaij, A. Impacts of large-scale Intermittent Renewable Energy Sources on electricity systems, and how these can be modeled. Renew. Sustain. Energy Rev. 2014, 33, 443–466. [Google Scholar] [CrossRef]
- Supporting Document for the Network Code on Load-Frequency Control and Reserves; European Network of Transmission System Operators for Electricity (ENTSO-E): Brussels, Belgium, 2013.
- Zhang, F.; Hu, Z.; Xie, X.; Zhang, J.; Song, Y. Assessment of the Effectiveness of Energy Storage Resources in the Frequency Regulation of a Single-Area Power System. IEEE Trans. Power Syst. 2017, 32, 3373–3380. [Google Scholar] [CrossRef]
- Amano, H.; Ohshiro, Y.; Kawakami, T.; Inoue, T. Utilization of battery energy storage system for load frequency control toward large-scale renewable energy penetration. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–7. [Google Scholar]
- Kim, Y.-J. Experimental study of battery energy storage systems participating in grid frequency regulation. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Dallas, TX, USA, 3–5 May 2016; pp. 1–5. [Google Scholar]
- Song, J.; Pan, X.; Lu, C.; Xu, H. A Simulation-Based Optimization Method for Hybrid Frequency Regulation System Configuration. Energies 2017, 10, 1302. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Liu, H.; Wang, F.; Yan, T.; Wang, K. Secondary frequency control strategy for BESS considering their degree of participation. Energy Rep. 2020, 6, 594–602. [Google Scholar] [CrossRef]
- Cheng, Y.; Tabrizi, M.; Sahni, M.; Povedano, A.; Nichols, D. Dynamic Available AGC Based Approach for Enhancing Utility Scale Energy Storage Performance. IEEE Trans. Smart Grid 2014, 5, 1070–1078. [Google Scholar] [CrossRef]
- Doenges, K.; Egido, I.; Sigrist, L.; Miguelez, E.L.; Rouco, L. Improving AGC Performance in Power Systems With Regulation Response Accuracy Margins Using Battery Energy Storage System (BESS). IEEE Trans. Power Syst. 2019, 35, 2816–2825. [Google Scholar] [CrossRef]
- Datta, U.; Kalam, A.; Shi, J. Battery Energy Storage System Control for Mitigating PV Penetration Impact on Primary Frequency Control and State-of-Charge Recovery. IEEE Trans. Sustain. Energy 2020, 11, 746–757. [Google Scholar] [CrossRef] [Green Version]
- Orihara, D.; Saitoh, H. Battery-assisted load frequency control coordinated with economic load dispatching. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Auckland, New Zealand, 4–7 December 2017; pp. 1–5. [Google Scholar]
- Liang, L.; Zhong, J.; Jiao, Z. Frequency regulation for a power system with wind power and battery energy storage. In Proceedings of the IEEE International Conference on Power System Technology (POWERCON), Auckland, New Zealand, 30 October–2 November 2012; pp. 1–6. [Google Scholar]
- Aditya, S.; Das, D. Battery energy storage for load frequency control of an interconnected power system. Electr. Power Syst. Res. 2001, 58, 179–185. [Google Scholar] [CrossRef]
- Borsche, T.; Ulbig, A.; Koller, M.; Andersson, G. Power and energy capacity requirements of storages providing frequency control reserves. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Koller, M.; Borsche, T.; Ulbig, A.; Andersson, G. Review of grid applications with the Zurich 1MW battery energy storage system. Electr. Power Syst. Res. 2015, 120, 128–135. [Google Scholar] [CrossRef]
- Chang, J.-W.; Lee, G.-S.; Moon, H.-J.; Glick, M.B.; Moon, S.-I. Coordinated Frequency and State-of-Charge Control with Multi-Battery Energy Storage Systems and Diesel Generators in an Isolated Microgrid. Energies 2019, 12, 1614. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.-S.; Kim, E.-S.; Moon, S.-I. Frequency and Voltage Control Strategy of Standalone Microgrids with High Penetration of Intermittent Renewable Generation Systems. IEEE Trans. Power Syst. 2016, 31, 718–728. [Google Scholar] [CrossRef]
- Datta, M.; Senjyu, T. Fuzzy Control of Distributed PV Inverters/Energy Storage Systems/Electric Vehicles for Frequency Regulation in a Large Power System. IEEE Trans. Smart Grid 2013, 4, 479–488. [Google Scholar] [CrossRef]
- Tan, J.; Zhang, Y. Coordinated Control Strategy of a Battery Energy Storage System to Support a Wind Power Plant Providing Multi-Timescale Frequency Ancillary Services. IEEE Trans. Sustain. Energy 2017, 8, 1140–1153. [Google Scholar] [CrossRef]
- Li, P.; Tan, Z.; Zhou, Y.; Li, C.; Li, R.; Qi, X. Secondary Frequency Regulation Strategy With Fuzzy Logic Method and Self-Adaptive Modification of State of Charge. IEEE Access 2018, 6, 43575–43585. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Zhu, D.; Hug-Glanzmann, G. Robust control design for integration of energy storage into frequency regulation. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–8. [Google Scholar]
- Bevrani, H.; Hiyama, T. Intelligent Automatic Generation Control; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Koller, M.; Borsche, T.; Ulbig, A.; Andersson, G. Defining a degradation cost function for optimal control of a battery energy storage system. In Proceedings of the 2013 IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–6. [Google Scholar]
- All CE TSOs’ Proposal for Additional Properties of FCR in Accordance with Article 154(2) of the Commission Regulation (EU) 2017/1485 of 2 August 2017 Establishing a Guideline on Electricity Transmission System Operation; ENTSO-e: Brussels, Belgium, 2019.
- Cyprus Transmission and Distribution Rules 5.3.0; Transmission System Operator: Strovolos, Cyprus, 2020. (In Greek)
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems; Wiley-VCH Verlag GmbH: New York, NY, USA, 2010. [Google Scholar]
- Psarros, G.; Nanou, S.; Papaefthymiou, S.V.; Papathanassiou, S.A. Generation scheduling in non-interconnected islands with high RES penetration. Renew. Energy 2018, 115, 338–352. [Google Scholar] [CrossRef]
- Amano, H.; Shima, W.; Kawakami, T.; Inoue, T.; Uehara, Y.; Nakama, H.; Oshiro, Y.; Toguchi, M. Field verification of control performance of a LFC system to make effective use of existing power generation and battery energy storage system. In Proceedings of the IEEE PES ISGT Europe 2013, Lyngby, Denmark, 6–9 October 2013; pp. 1–5. [Google Scholar]
- Dai, J.; Castro, H.; Guo, J.; Khandelwal, T.; Shokooh, S.; Shokooh, F. Automatic generation control system for an industrial facility with onsite generation. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009; pp. 1–8. [Google Scholar]
- Roy, S.; Malik, O.; Hope, G. Adaptive control of speed and equivalence ratio dynamics of a diesel driven power-plant. IEEE Trans. Energy Convers. 1993, 8, 13–19. [Google Scholar] [CrossRef]
- Turbine-Governor Models, Standard Dynamic Turbine-Governor Systems in NEPLAN Power System Analysis Tool; NEPLAN: Küsnacht, Switzerland, 2013.
- PSS/E Model Libray; Siemens Industry, Inc.: Munich, Germany, 2013.
- Tremblay, O.; Dessaint, L.-A. Experimental Validation of a Battery Dynamic Model for EV Applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef] [Green Version]
- Erlich, I.; Wilch, M. Primary frequency control by wind turbines. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E. State of the art perturb and observe MPPT algorithms based wind energy conversion systems: A technology review. Int. J. Electr. Power Energy Syst. 2021, 126, 106598. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, W.; Wang, J.; Gu, S. A coordinated primary frequency regulation from Permanent Magnet Synchronous Wind Turbine Generation. In Proceedings of the 2012 IEEE in Power Electronics and Machines in Wind Applications (PEMWA), Denver, CO, USA, 16–18 July 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Malatestas, P.; Papadopoulos, M.; Stavrakakis, G. Modeling and identification of diesel-wind turbines systems for wind penetration assessment. IEEE Trans. Power Syst. 1993, 8, 1091–1097. [Google Scholar] [CrossRef]
- Bründlinger, R.; Schaupp, T.; Arnold, G.; Schäfer, N.; Graditi, G.; Adinolfi, G. Implementation of the European Network Code on Requirements for Generators on the European National Level. In Proceedings of the 8th Sol Integr Work, Stockholm, Sweden, 13–14 July 2018. [Google Scholar]
- Non-Interconnected Island Power Systems (NIIs) Management Code; Hellenic Electricity Distribution System Operator: Athens, Greece, 2020. (In Greek)







| Reserves | ||||||
|---|---|---|---|---|---|---|
| Case (i) | 600 | 300 | 300 | 0 | 550 | 0 |
| Cases (ii)–(iv) | 600 | 300 | 100 | 200 | 50 (0–15 min) 450 (15–60 min) | 500 (0–15 min) 100 (15–60 min) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papakonstantinou, A.G.; Papathanassiou, S.A. Battery Energy Storage Participation in Automatic Generation Control of Island Systems, Coordinated with State of Charge Regulation. Appl. Sci. 2022, 12, 596. https://doi.org/10.3390/app12020596
Papakonstantinou AG, Papathanassiou SA. Battery Energy Storage Participation in Automatic Generation Control of Island Systems, Coordinated with State of Charge Regulation. Applied Sciences. 2022; 12(2):596. https://doi.org/10.3390/app12020596
Chicago/Turabian StylePapakonstantinou, Apostolos G., and Stavros A. Papathanassiou. 2022. "Battery Energy Storage Participation in Automatic Generation Control of Island Systems, Coordinated with State of Charge Regulation" Applied Sciences 12, no. 2: 596. https://doi.org/10.3390/app12020596