
Super-Twisting Sliding Mode Control with SVR Disturbance Observer for PMSM Speed Regulation


 ,
,
Abstract
:1. Introduction
2. Sliding Mode Control for PMSM
2.1. PMSM Modeling
2.2. SMC Controller Design for PMSM
3. STRL Controller Design
3.1. Super-Twisting Reaching Law
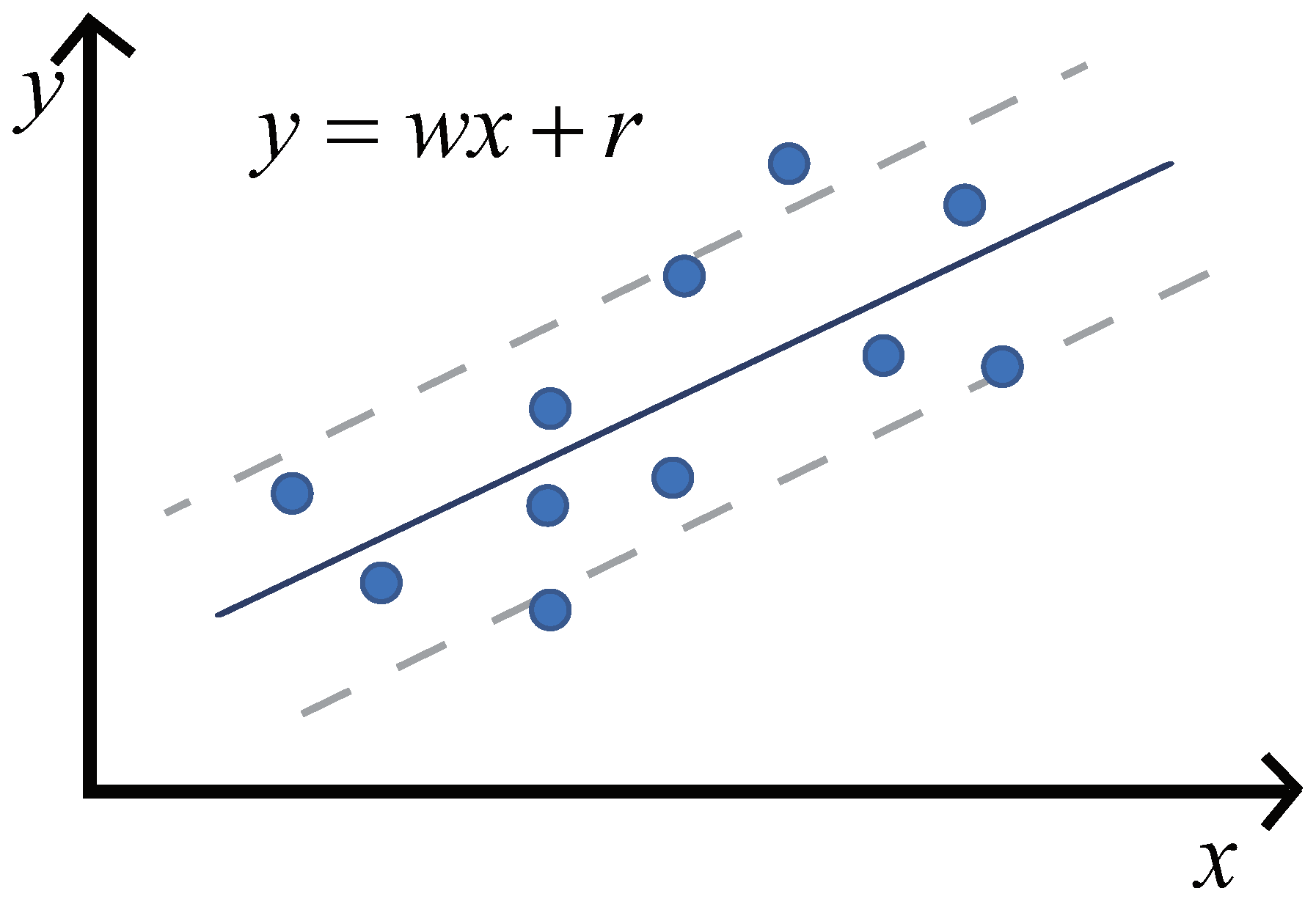
3.2. Support Vector Regression-Disturbance Observer
3.3. Stability Analysis
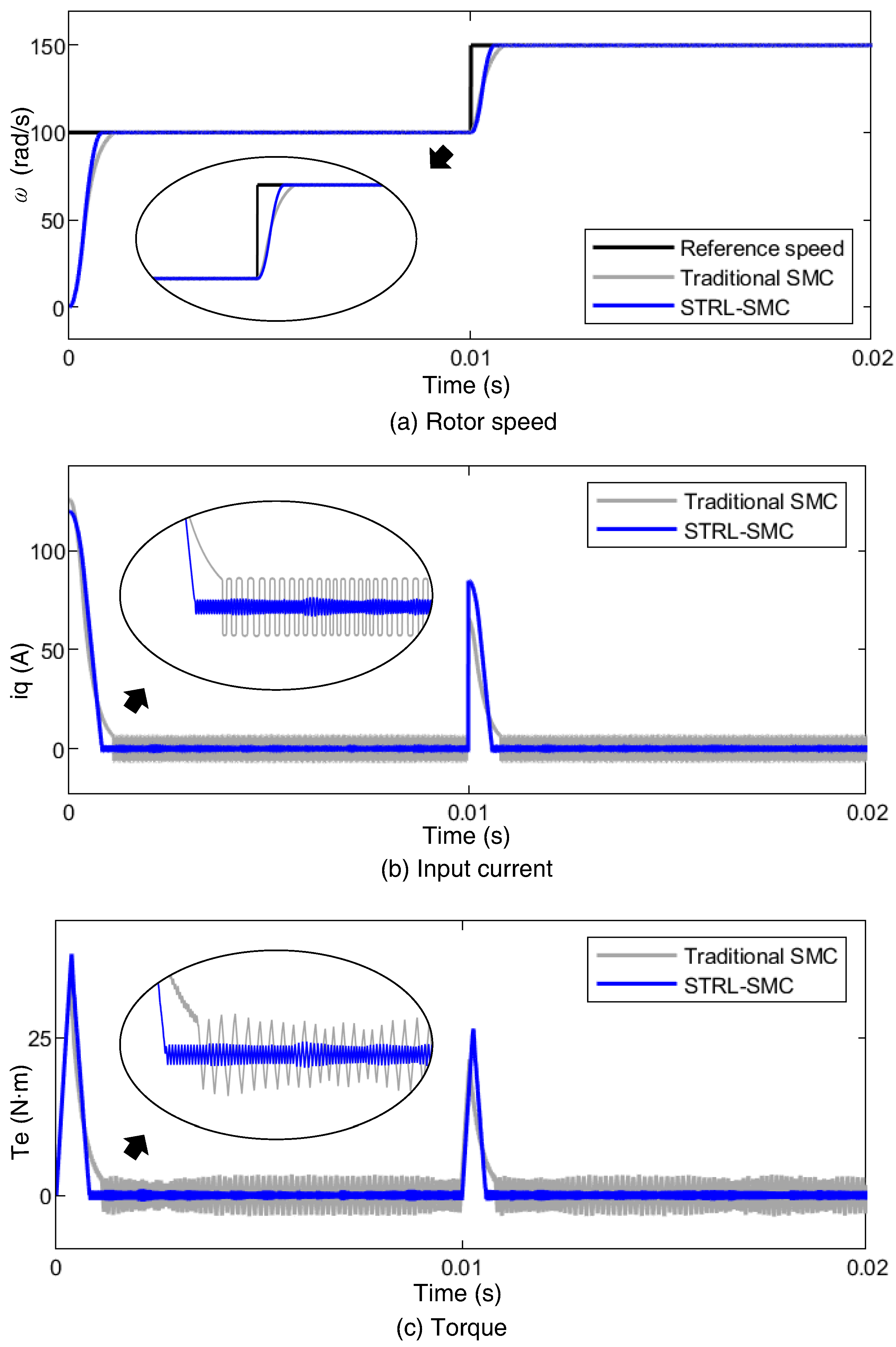
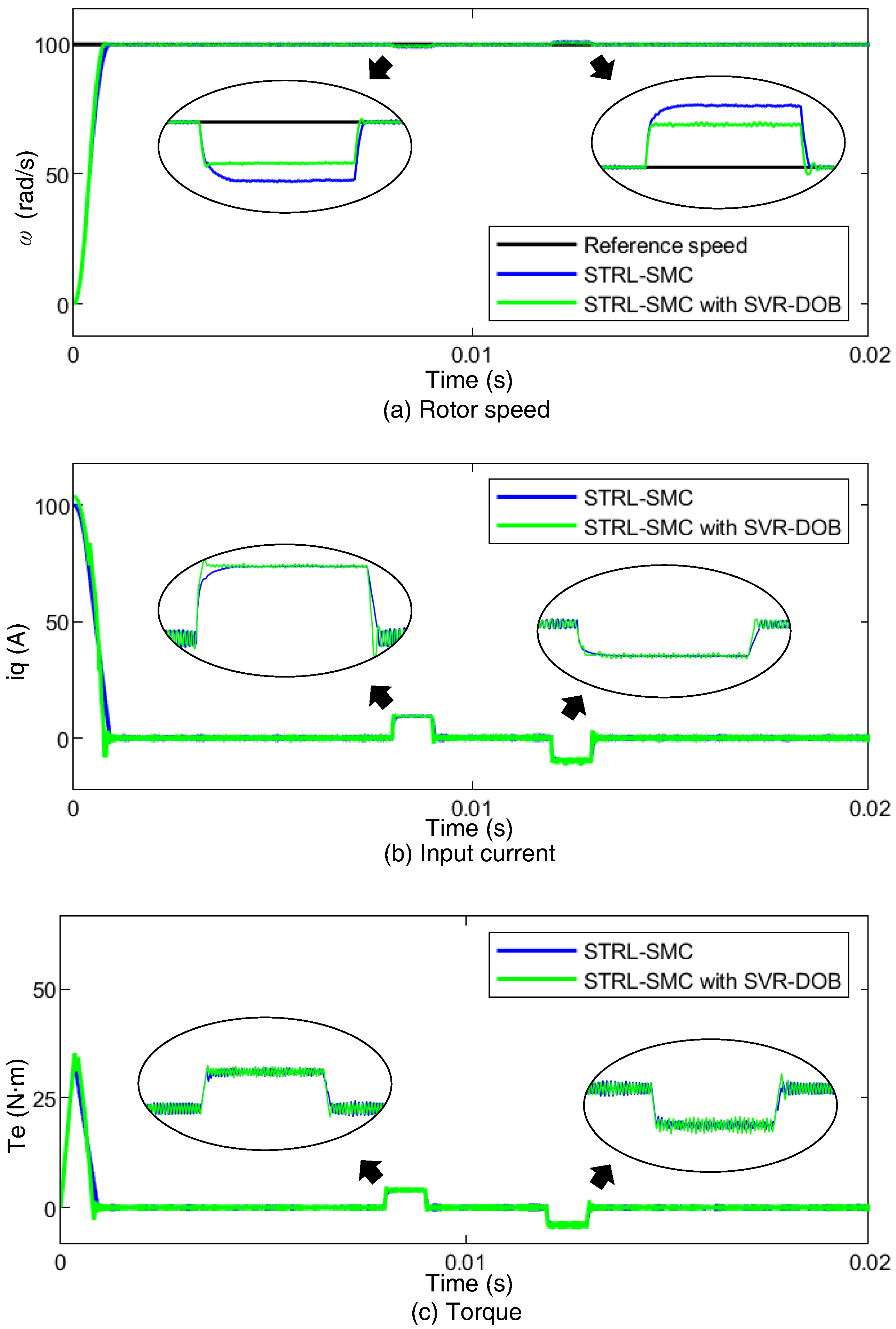
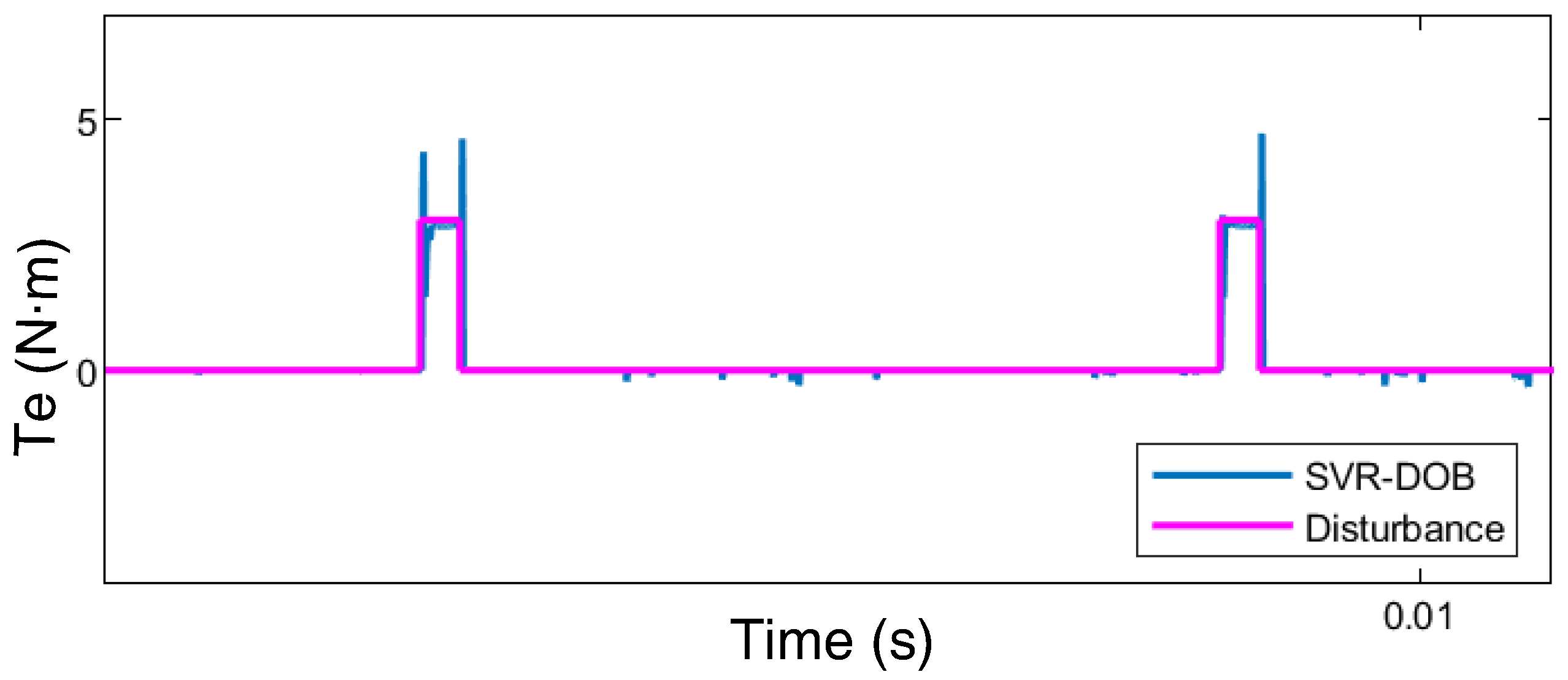
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, K.; Li, P.; Zhang, C.; Li, X.; He, J.; Lin, Y. Sliding mode observer-based current sensor fault reconstruction and unknown load disturbance estimation for PMSM driven system. Sensors 2017, 17, 2833. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, Z.; Sun, X.; Cai, Y.; Yang, Z.; Lei, G.; Guo, Y.; Zhu, J. Torque analysis and dynamic performance improvement of a PMSM for EVs by skew angle optimization. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Jung, J.W.; Leu, V.Q.; Do, T.D.; Kim, E.K.; Choi, H.H. Adaptive PID speed control design for permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 2014, 30, 900–908. [Google Scholar] [CrossRef]
- Xiaoguang, Z.; Ke, Z.; Li, S. A PMSM sliding mode control system based on a novel reaching law. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Ali, N.; Ur Rehman, A.; Alam, W.; Maqsood, H. Disturbance observer based robust sliding mode control of permanent magnet synchronous motor. J. Electr. Eng. Technol. 2019, 14, 2531–2538. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Zhao, K.; Sun, L. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- Wang, H.; Li, S.; Lan, Q.; Zhao, Z.; Zhou, X. Continuous terminal sliding mode control with extended state observer for PMSM speed regulation system. Trans. Inst. Meas. Control 2017, 39, 1195–1204. [Google Scholar] [CrossRef]
- Hou, H.; Yu, X.; Xu, L.; Rsetam, K.; Cao, Z. Finite-time continuous terminal sliding mode control of servo motor systems. IEEE Trans. Ind. Electron. 2020, 67, 5647–5656. [Google Scholar] [CrossRef]
- Ding, S.; Park, J.H.; Chen, C.C. Second-order sliding mode controller design with output constraint. Automatica 2020, 112, 108704. [Google Scholar] [CrossRef]
- Fortuna, L.; Muscato, G. A roll stabilization system for a monohull ship: Modeling, identification, and adaptive control. IEEE Trans. Control Syst. Technol. 1996, 4, 18–28. [Google Scholar] [CrossRef]
- Chu, V.K.; Tomizuka, M. Sliding mode control with nonlinear sliding surfaces. IFAC Proc. Vol. 1996, 29, 2877–2882. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles. IEEE J. Ocean. Eng. 2018, 44, 363–385. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Yu, X. Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Trans. Ind. Inf. 2013, 9, 1879–1891. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S.; Yu, X. Composite super-twisting sliding mode control design for PMSM speed regulation problem based on a novel disturbance observer. IEEE Trans. Energy Convers. 2020, 36, 2591–2599. [Google Scholar] [CrossRef]
- Xu, W.; Jiang, Y.; Mu, C. Novel composite sliding mode control for PMSM drive system based on disturbance observer. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Kim, E.; Kim, J.; Nguyen, H.T.; Choi, H.H.; Jung, J.W. Compensation of parameter uncertainty using an adaptive sliding mode control strategy for an interior permanent magnet synchronous motor drive. IEEE Access 2019, 7, 11913–11923. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, B.; Fang, S. Sliding mode control of PMSM based on a novel disturbance observer. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 1990–1994. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. A composite sliding mode control for SPMSM drives based on a new hybrid reaching law with disturbance compensation. IEEE Trans. Transp. Electrif. 2021, 7, 1427–1436. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Y.; Zhang, X.; Liang, J. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system. IEEE Trans. Power Electron. 2019, 35, 4117–4126. [Google Scholar] [CrossRef]
- Burton, J.A.; Zinober, A.S.I. Continuous approximation of variable structure control. Int. J. Syst. Sci. 1986, 17, 875–885. [Google Scholar] [CrossRef]
- Cruz-Zavala, E.; Moreno, J.A.; Fridman, L.M. Adaptive gains super-twisting algorithm for systems with growing perturbations. IFAC Proc. Vol. 2011, 44, 3039–3044. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S. GPIO based super-twisting sliding mode control for PMSM. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 747–751. [Google Scholar] [CrossRef]
- Weijie, L.; Dongliang, L.; Qiuxuan, W.; Xiaodan, Z. On sliding mode control of permanent magnet synchronous motor. In Proceedings of the The 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 4555–4559. [Google Scholar] [CrossRef]
- Shtessel, Y.; Taleb, M.; Plestan, F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Zhang, L.; Bai, J.; Wu, J. SPMSM sliding mode control based on the new super twisting algorithm. Complexity 2021, 2021, 2886789. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Moreno, J.A.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Automat. Contr. 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Uçak, K.; Öke Günel, G. An adaptive sliding mode controller based on online support vector regression for nonlinear systems. Soft Comput. 2020, 24, 4623–4643. [Google Scholar] [CrossRef]
- Xu, C.; Wang, K.; Wang, Y.; Chen, C.; Zhang, B. Super-twisting sliding mode control of permanent magnet synchronous motor based on predictive adaptive law. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 2731–2736. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| R | Stator phase resistance | 2.875 |
| L | Inductance | 153 mH |
| Flux linkage | 0.175 Wb | |
| J | Inertia | 5.5 × 10−3 kg·m |
| Pole pairs | 4 |
| Traditional SMC | STRL-SMC | |
|---|---|---|
| Maximum overshoot (rad/s) | 2.926 | 2.284 |
| Settling time (s) | 0.00143 | 0.00140 |
| Steady-state error (rad/s) | 3.493 | 3.449 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, A.; Kim, H.; Hu, M.; Kim, Y.; Ahn, H.; You, K. Super-Twisting Sliding Mode Control with SVR Disturbance Observer for PMSM Speed Regulation. Appl. Sci. 2022, 12, 10749. https://doi.org/10.3390/app122110749
Choi A, Kim H, Hu M, Kim Y, Ahn H, You K. Super-Twisting Sliding Mode Control with SVR Disturbance Observer for PMSM Speed Regulation. Applied Sciences. 2022; 12(21):10749. https://doi.org/10.3390/app122110749
Chicago/Turabian StyleChoi, Ahyeong, Hyunchang Kim, Mingyuan Hu, Youngjae Kim, Hyeongki Ahn, and Kwanho You. 2022. "Super-Twisting Sliding Mode Control with SVR Disturbance Observer for PMSM Speed Regulation" Applied Sciences 12, no. 21: 10749. https://doi.org/10.3390/app122110749