
Study on the Shearer Attitude Sensing Error Compensation Method Based on Strapdown Inertial Navigation System

Abstract
:1. Introduction
2. State of the Art
3. Principle of the Shearer Attitude Sensing System
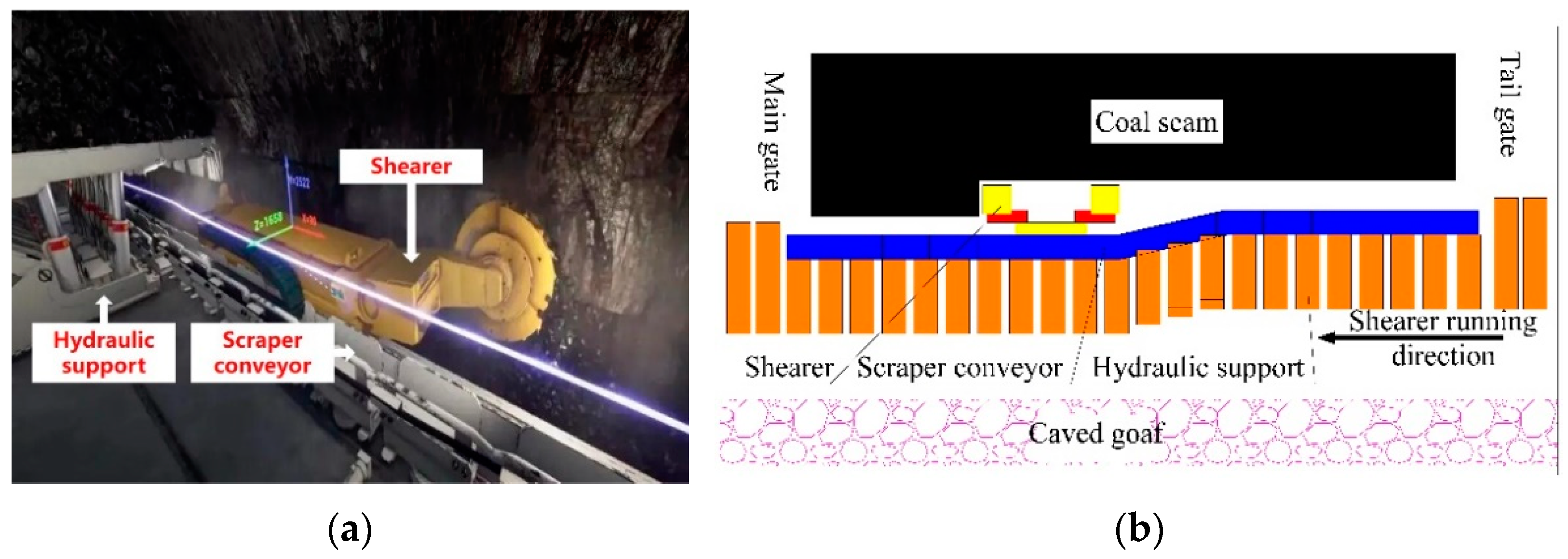
3.1. Motion Characteristics of the Shearer
3.2. Principle of the Shearer Attitude Sensing System
3.3. Calculating Algorithm of the Shearer Attitude
4. Error Sources of SINS
- (1)
- Initial alignment error
- (2)
- Installation error
- (3)
- Inertia sensor error
- (4)
- Calculation error
5. Initial Alignment Error Compensation for Shearer’s SINS
5.1. Initial Alignment of SINS
5.2. Fine Alignment Stage Based on Optimized UKF Algorithm
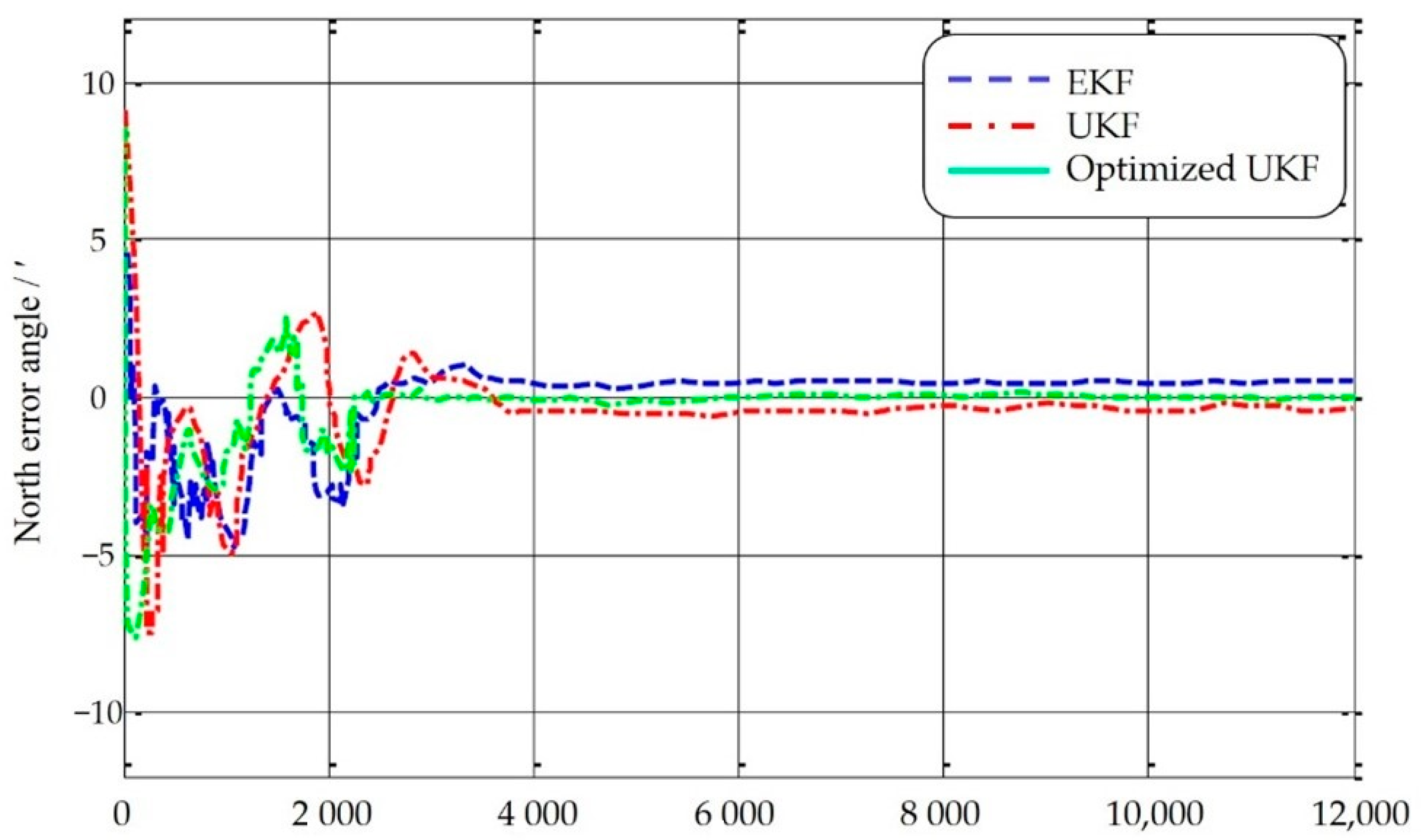
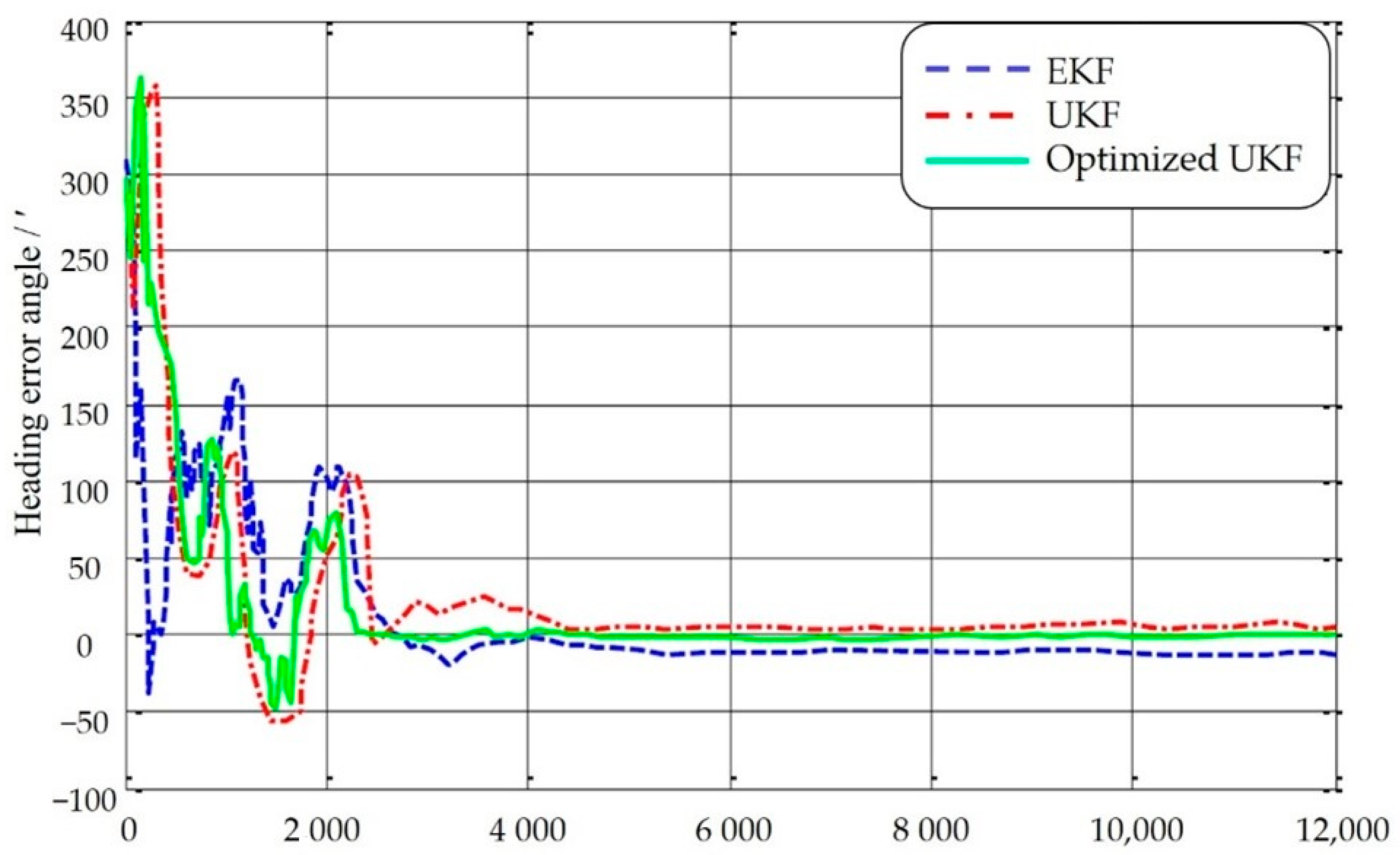
5.3. Simulation Comparison of Filtering Effects for Optimized UKF
6. Installation Error Compensation for the Shearer’s SINS
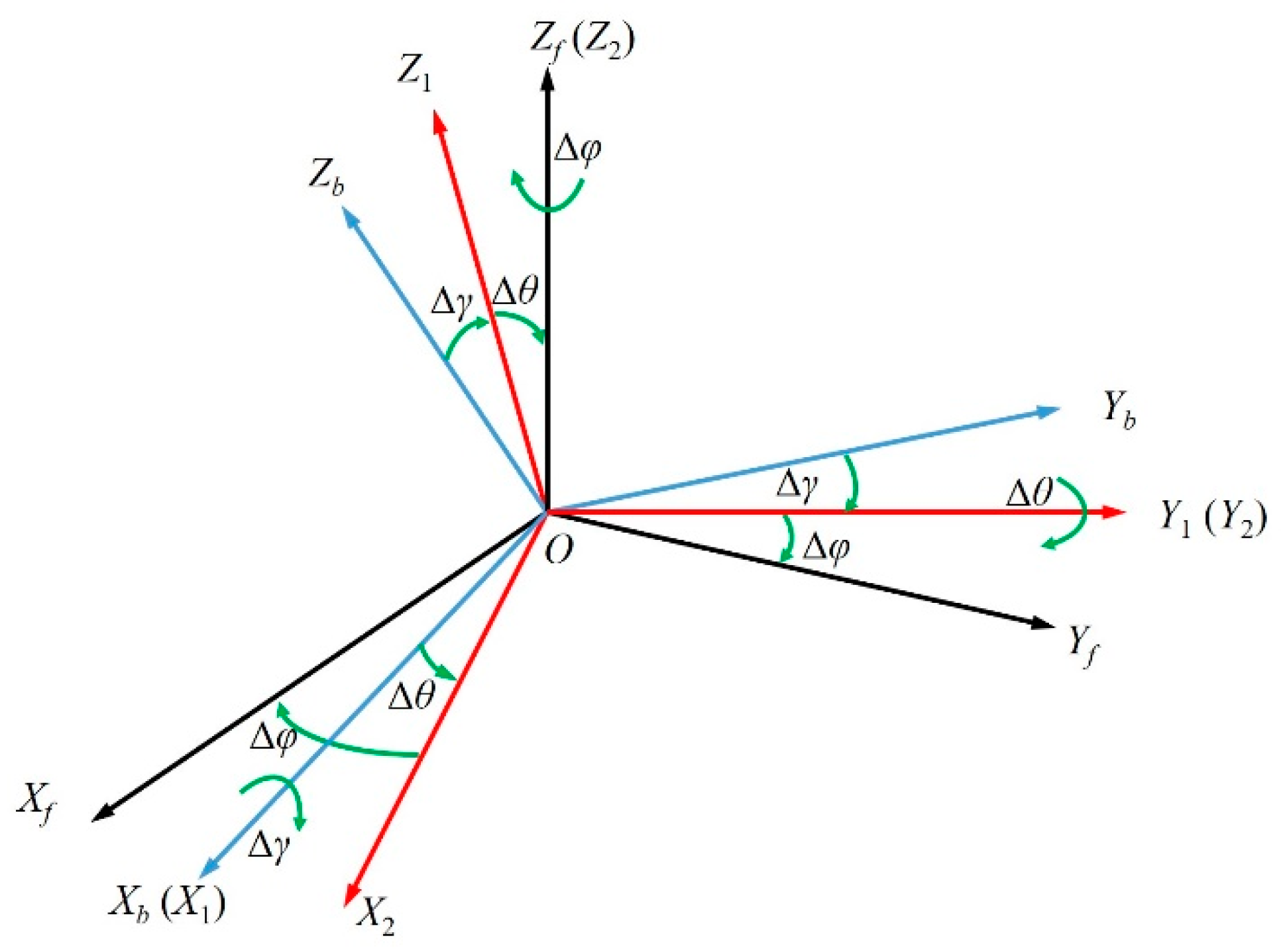
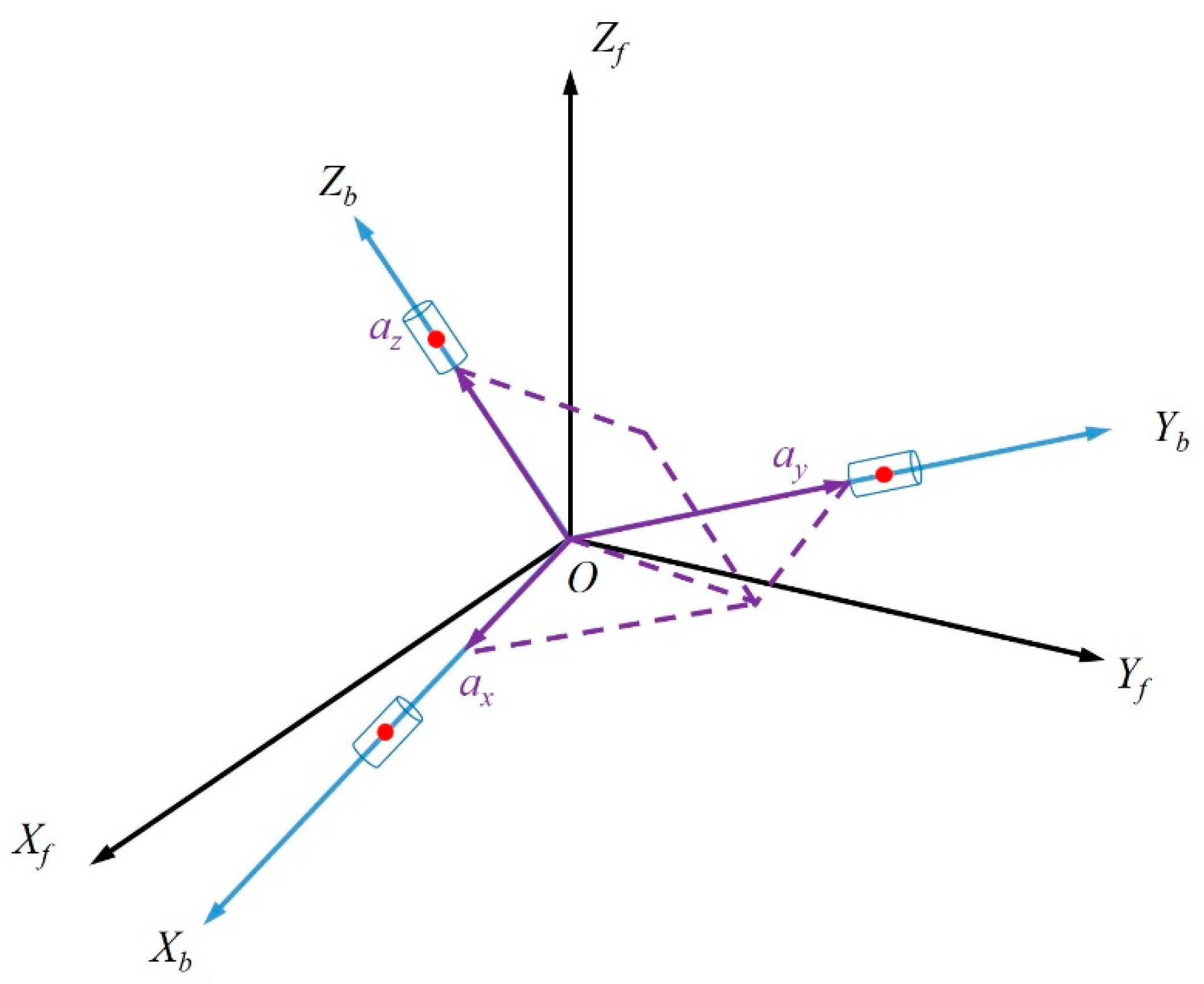
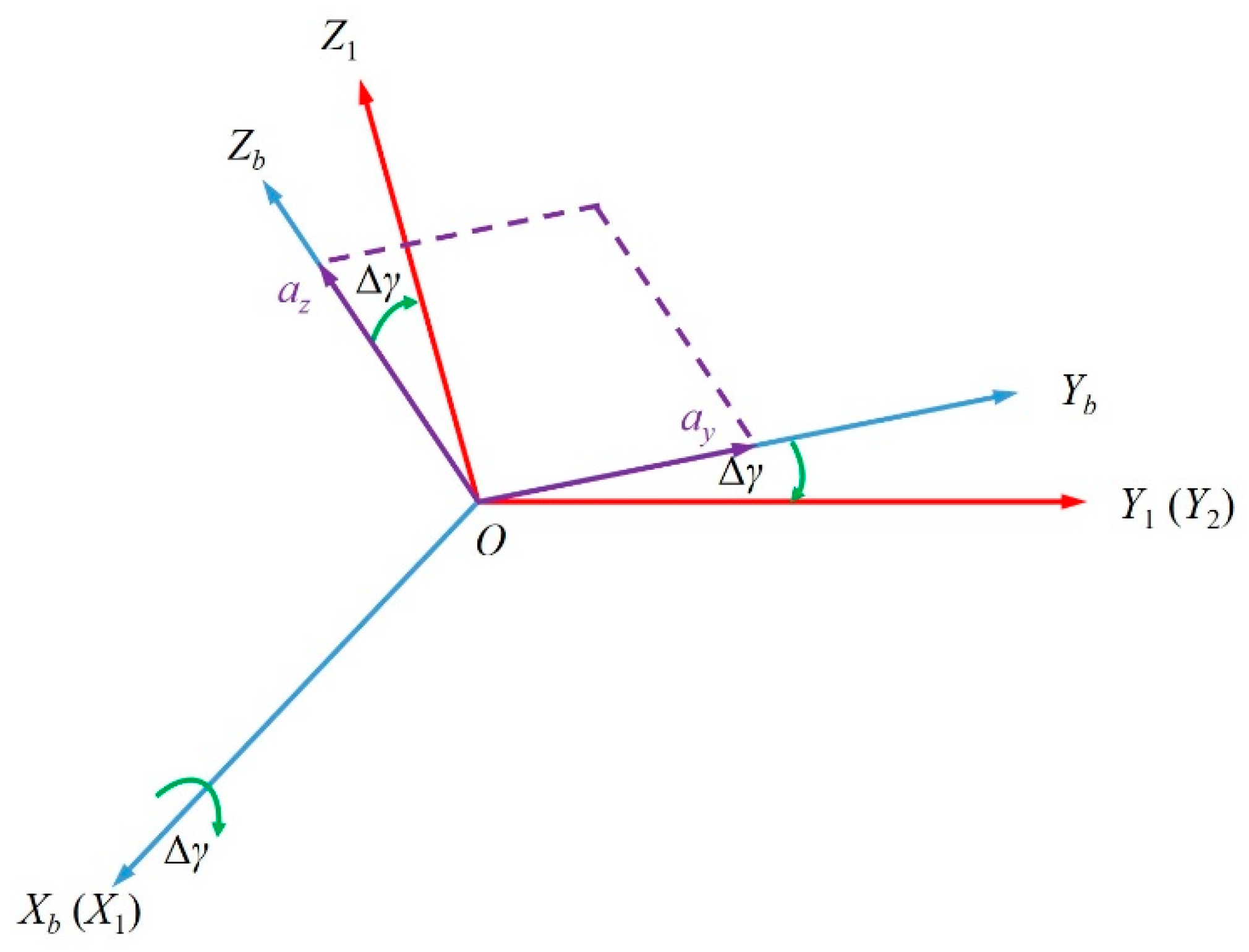
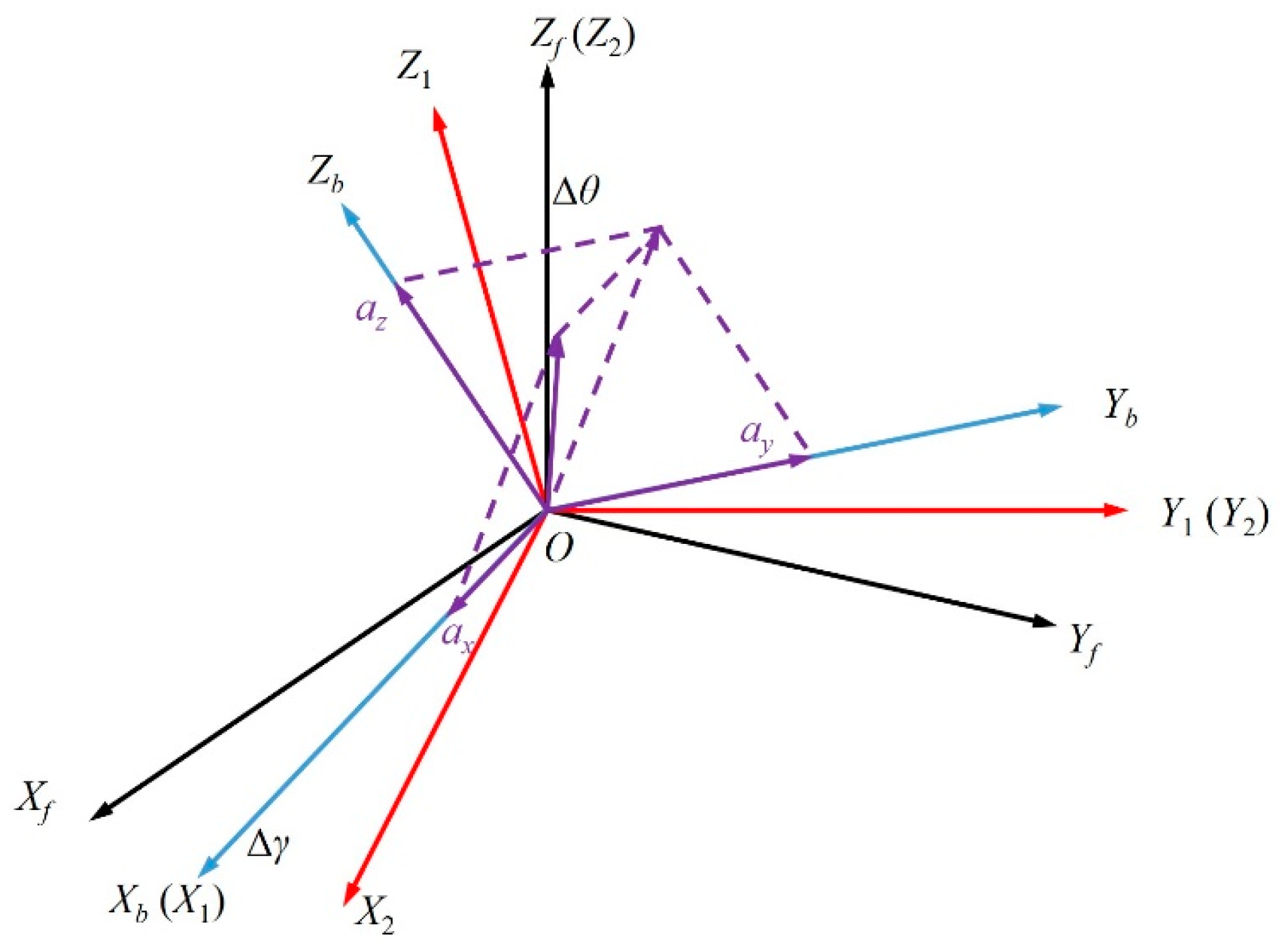
6.1. Static Calibration Model of Installation Deviation Angle
6.2. Influence of Installation Deviation Angle Error
- (1)
- Accelerometer error caused by the installation deviation angle
- (2)
- Angular velocity error caused by the installation deviation angle
6.3. Lever Arm Effect Error and Compensation Algorithm
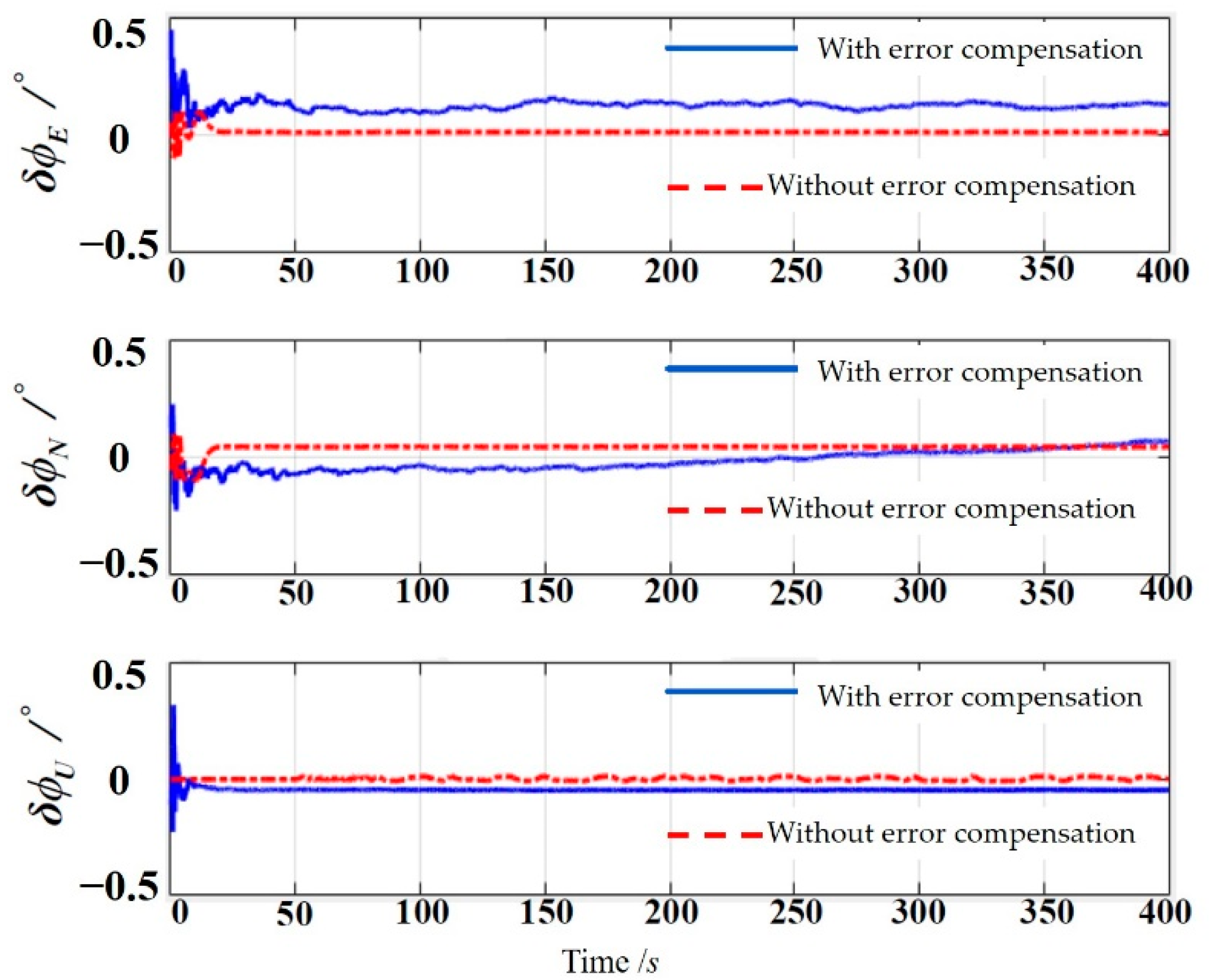
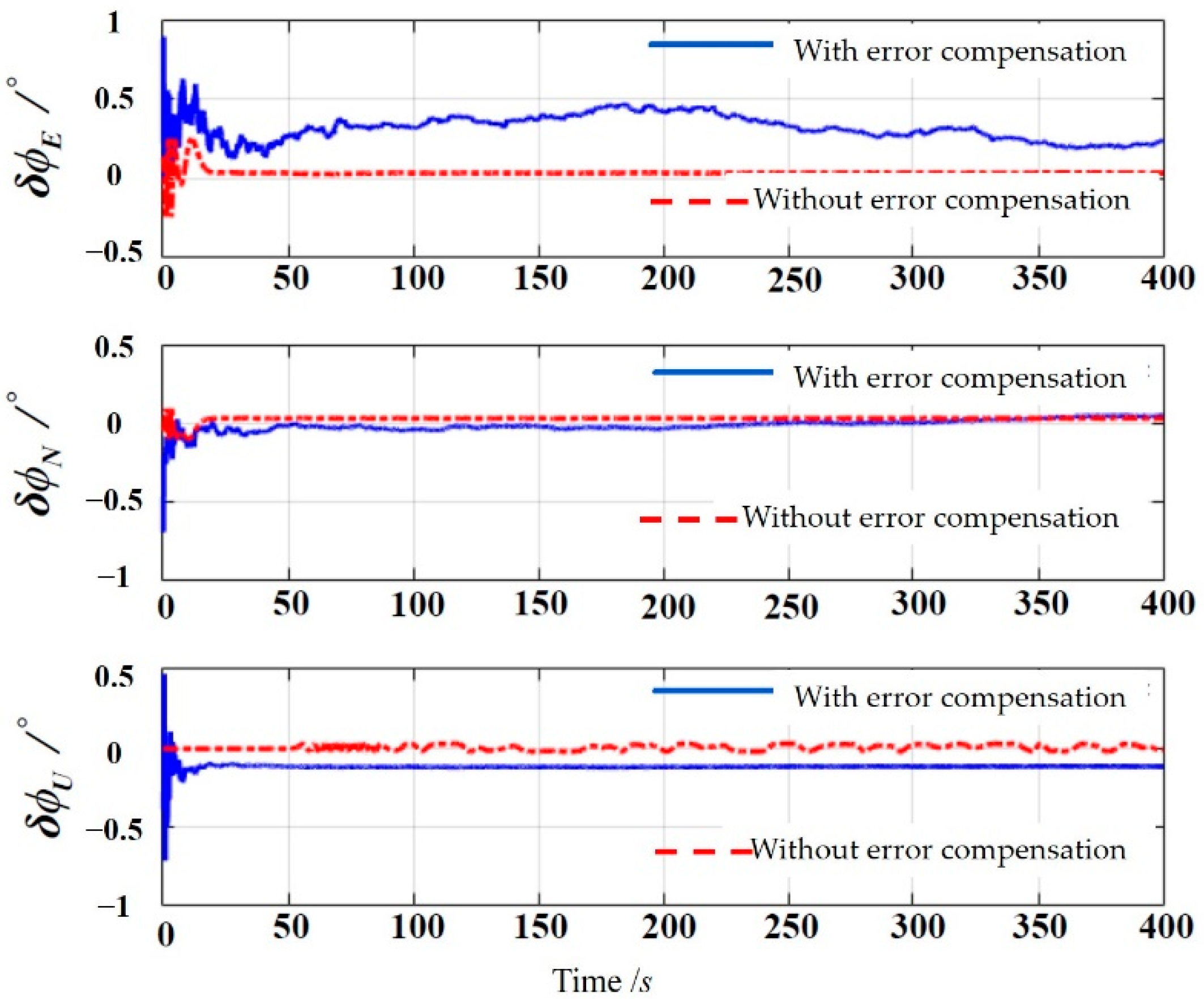
6.4. Simulation Analysis of Lever Arm Effect Error Compensation
7. Shearer Vibration Error and Compensation Algorithm
7.1. Coning Error and Compensation Algorithm
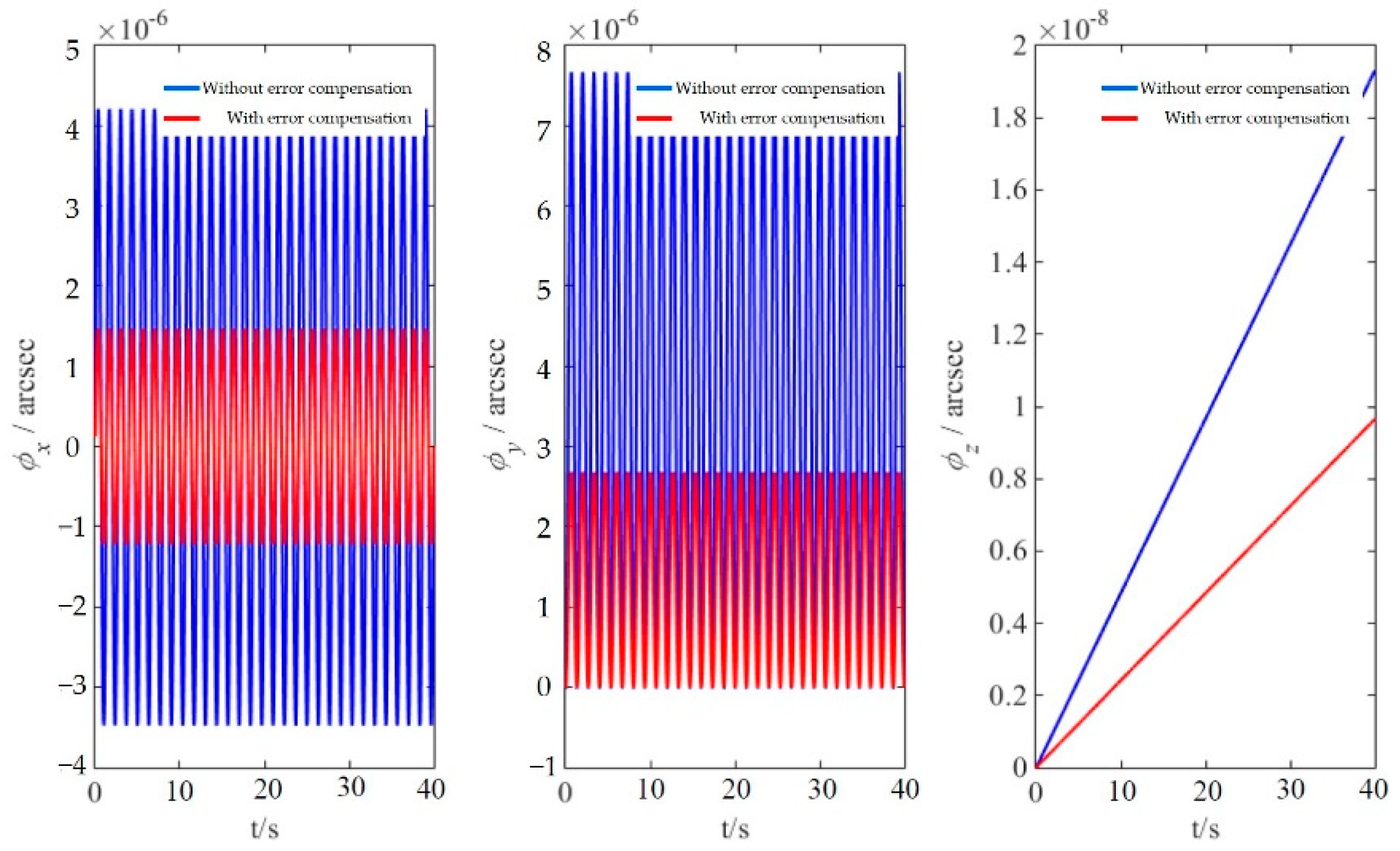
7.2. Simulation Analysis of Coning Error Compensation
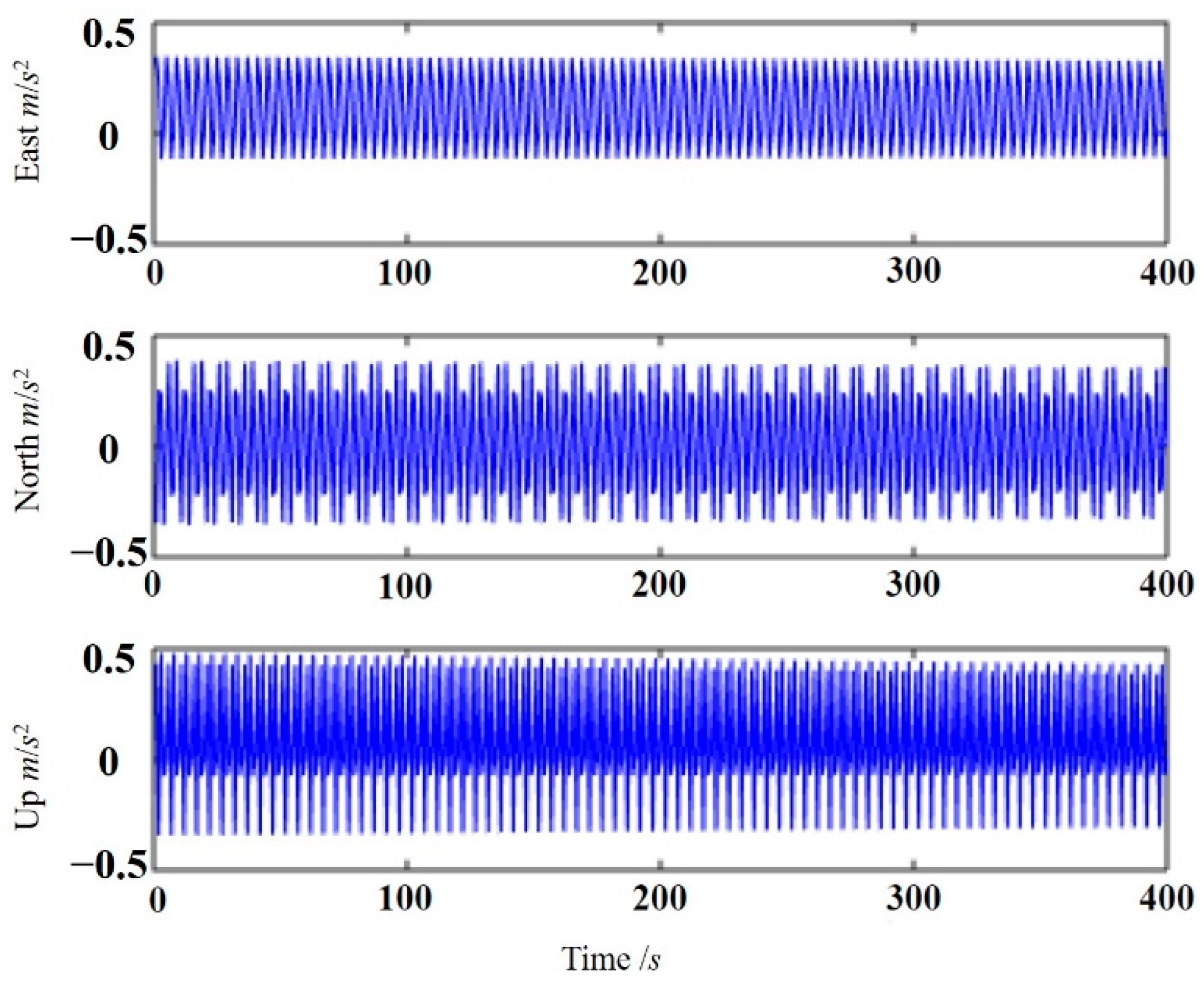
7.3. Sculling Error and Compensation Algorithm
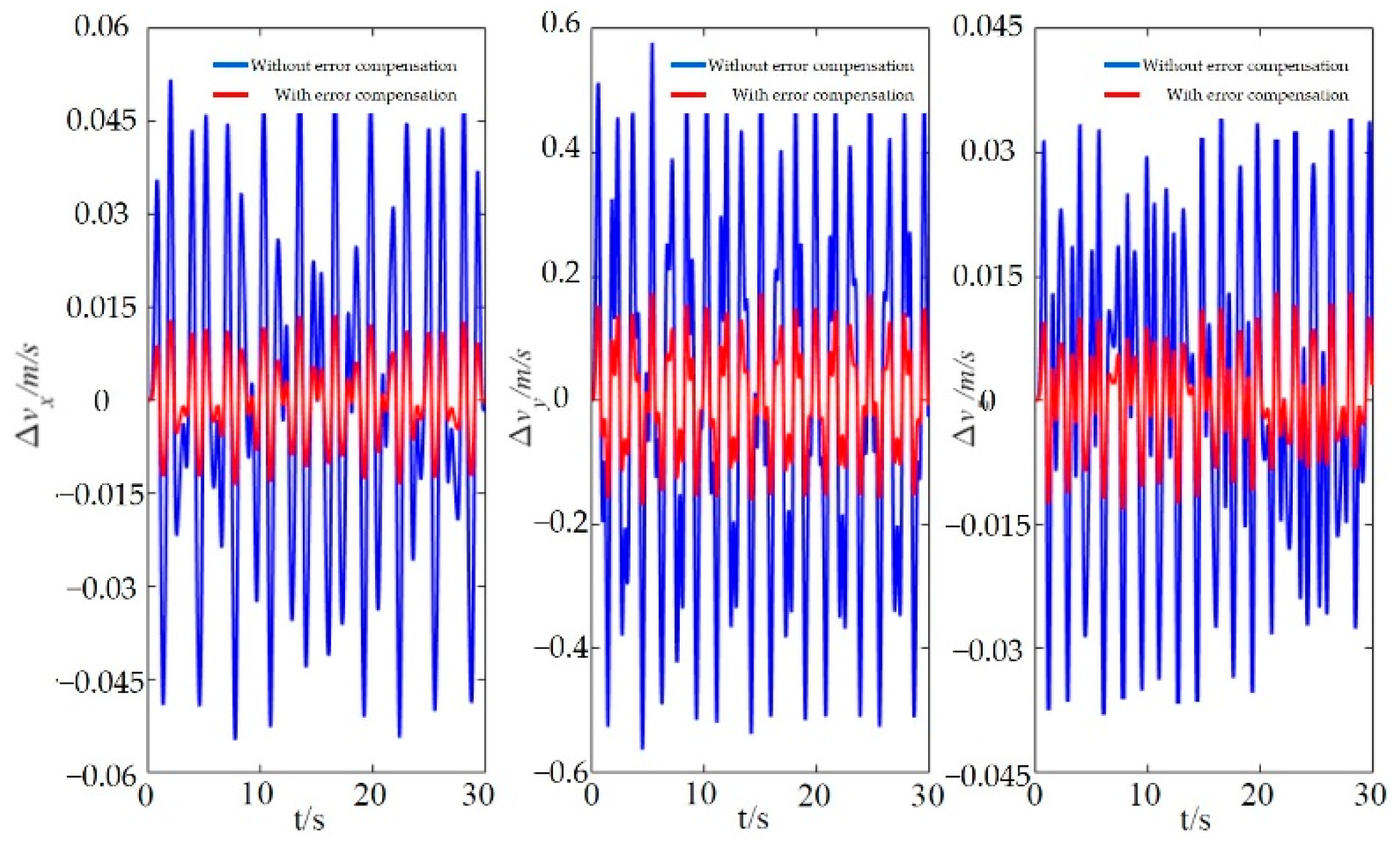
7.4. Simulation Analysis of Sculling Error Compensation
8. Conclusions
- Based on the basic principle of the SINS, a real-time algorithm for solving the attitude, velocity, and position of the shearer is constructed, and the specific process of the coarse alignment and fine alignment of the SINS is studied. The main error terms affecting the accuracy of SINS are analyzed for the shortcoming that the accumulated errors of SINS at long endurance are difficult to be effectively corrected.
- The initial alignment of SINS is carried out based on the optimized unscented Kalman filter algorithm. The influence of installation deviation angle on SINS error is clarified, an effective installation error compensation algorithm is proposed, and the lever arm effect error compensation method is optimized, the influence of lever arm effect on the system accuracy is analyzed through simulation. Given the influence of the strong vibration environment of the shearer on the accuracy of SINS, the coning error and sculling error caused by the shearer vibration are compensated based on the rotation vector method.
- This paper conducts an in-depth study on the real-time and accurate shearer attitude sensing and provides a complete set of theories and methods to improve the attitude sensing accuracy of the underground shearer, simulation results also verify that the theories and methods can significantly improve the perception accuracy, which not only helps enrich the research results of intelligent sensing at fully mechanized mining face, but also can provide theoretical and technical reference for production state prediction at fully mechanized mining face and intelligent control of underground mining equipment.
9. Future Developments
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Wang, G.; Xu, Y.; Ren, H. Intelligent and ecological coal mining as well as clean utilization technology in China: Review and prospects. Int. J. Min. Sci. Technol. 2019, 29, 161–169. [Google Scholar] [CrossRef]
- Xie, H.; Ju, Y.; Gao, F.; Gao, M.; Zhang, R. Groundbreaking theoretical and technical conceptualization of fluidized mining of deep underground solid mineral resources. Tunn. Undergr. Space Technol. 2017, 67, 68–70. [Google Scholar] [CrossRef]
- Ge, S.; Hao, S.; Zhang, S.; Zhang, X.F.; Zhang, L.; Wang, S.B. Status of intelligent coal mining technology and potential key technologies in China. Coal Sci. Technol. 2020, 48, 28–46. [Google Scholar]
- Xie, H.; Wang, J.; Wang, G. New ideas of coal revolution and layout of coal science and technology development. J. China Coal Soc. 2018, 43, 1187–1197. [Google Scholar]
- Xinqiu, F.; Minfu, L.; Shuang, L. Research on the key technologies of multi-parameter accurate perception and security decision in intelligent working face. J. China Coal Soc. 2020, 45, 493–507. [Google Scholar]
- Thrybom, L.; Neander, J.; Hansen, E.; Landernas, K. Future Challenges of Positioning in Underground Mines. IFAC-Pap. Line 2015, 48, 222–226. [Google Scholar] [CrossRef]
- Wang, G.; Fan, J.; Xu, Y. Innovation progress and prospect on key technologies of intelligent coal mining. Ind. Mine Autom. 2018, 44, 5–12. [Google Scholar]
- Ren, H.; Wang, G.; LI, S.; Niu, J. Development of intelligent sets equipment for fully-mechanized 7 m height mining face. Coal Sci. Technol. 2015, 43, 116–121. [Google Scholar]
- Ge, S.; Wang, Z.; Wang, S. Study on key technology of internet plus intelligent coal shearer. Coal Sci. Technol. 2016, 44, 1–9. [Google Scholar]
- Wang, S.; Zhang, B.; Wang, S.; Ge, S. Dynamic Precise Positioning Method of Shearer Based on Closing Path Optimal Estimation Model. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1468–1475. [Google Scholar]
- Zhang, B.; Wang, S.; Ge, S. Effects of initial alignment error and installation noncoincidence on the shearer positioning accuracy and calibration method. J. China Coal Soc. 2017, 42, 789–795. [Google Scholar]
- Yang, H.; Li, W.; Zhang, H. Fault tolerant integrated positioning system based on SINS/UWB in complex environment. Chin. J. Sci. Instrum. 2017, 38, 2177–2185. [Google Scholar]
- Wu, G.; Fang, X.; Zhang, L.; Liang, M.; Lv, J.; Quan, Z. Positioning accuracy of the shearer based on a strapdown inertial navigation system in underground coal mining. Appl. Sci. 2020, 10, 2176. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Wang, S. Improving the Shearer Positioning Accuracy Using the Shearer Motion Constraints in Longwall Panels. IEEE Access 2020, 8, 52466–52474. [Google Scholar] [CrossRef]
- Cao, B.; Wang, S.; Ge, S.; Liu, W. Improving the Positioning Accuracy of UWB System for Complicated Underground NLOS Environments. IEEE Syst. J. 2022, 16, 1808–1819. [Google Scholar] [CrossRef]
- Zhang, Z.B.; Xu, X.L.; Yan, L.L. Underground localization algorithm of wireless sensor network based on Zigbee. J. China Coal Soc. 2009, 34, 125–128. [Google Scholar]
- Xu, C.Y.; Song, Y.; Song, J.C. Development of the device to detect the position of coal mining machine by infrared ray based on MCU. J. China Coal Soc. 2011, 36, 167–171. [Google Scholar]
- Jonathon, C.R.; Chad, O.H.; Mark, T.D. Longwall automation: Trends, challenges and opportunities. Int. J. Min. Sci. Technol. 2017, 27, 733–739. [Google Scholar]
- Ge, S. The development of coal shearer technology (part nine)- environment sensing technology. China Coal 2021, 47, 1–17. [Google Scholar]
- Dziurzyński, W.; Krach, A.; Krawczyk, J.; Pałka, T. Numerical Simulation of Shearer Operation in a Longwall District. Energies 2020, 13, 5559. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, P.; Zheng, W.; Ji, X.; Jiang, H.; Wu, M. Error Compensation of Strapdown Inertial Navigation System for the Boom-Type Roadheader under Complex Vibration. Axioms 2021, 10, 224. [Google Scholar] [CrossRef]
- Fang, X.; Wu, G. Researches on simultaneous extraction of coal and gas in protective layer with a manless working face. Disaster Adv. 2013, 6, 200–207. [Google Scholar]
- Fang, X.; Zhao, J.; Hu, Y. Tests and error analysis of a self-positioning shearer operating at a manless working face. Min. Sci. Technol. 2010, 20, 53–58. [Google Scholar] [CrossRef]
- Fang, X.Q.; He, J.; Guo, M.J.; Zhang, B. Study on Unmaned Workface Mining Technology. Sci. Technol. Rev. 2008, 9, 56–61. [Google Scholar]
- Fang, X.Q.; He, J.; Zhang, B. Autonomous positioning system of Shearer in unmanned working face. J. Xian Univ. Sci. Technol. 2008, 28, 349–353. [Google Scholar]
- Hai, Y.; Wei, L.I.; Luo, C.M.; Fan, M.; Yng, B.H. Experimental study on position and attitude technique for shearer using SINS measurement. J. China Coal Soc. 2014, 39, 2550–2556. [Google Scholar]
- Zhang, B.; Fang, X.; Zou, Y.; Yu, R.; Cheng, Y. Auto-positioning system of shearer operating on manless working face based on gyroscope and odometer. Min. Process. Equip. 2010, 9, 10–13. [Google Scholar] [CrossRef]
- Si, Z.; Li, W.; Tong, J. Research on lever arm effect error compensation method for strap-down inertial navigation system of shearer. Ind. Mine Autom. 2019, 45, 56–61. [Google Scholar]
- Kushner, H.J. Dynamical Equations for Optimal Nonlinear Filtering. J. Differ. Equ. 1967, 3, 179–190. [Google Scholar] [CrossRef] [Green Version]
- Song, W.; Jianye, L.; Jizou, L. Research on influence induced by installation error in SINS. Transducer Microsyst. Technol. 2007, 26, 29–31. [Google Scholar]
- Ben, Y.; Zhang, Q.; Zang, X.; Huang, L.; Li, Q.; Wang, G. Effect of the outer lever arm on in-motion gyrocompass alignment for fiber-optic gyro strapdown inertial navigation system. Opt. Eng. 2017, 56, 044106. [Google Scholar] [CrossRef]
- Wang, L.; Wu, W.; Pan, X.; Li, G. Estimation and compensation for dynamic bending error parameters of mechanical dithered RLG sensitive axis. J. Chin. Inert. Technol. 2016, 24, 828–831. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| φE | φN | φU | ||||
|---|---|---|---|---|---|---|
| Error | Variance | Error | Variance | Error | Variance | |
| EKF | −0.510 | 0.0103 | 0.325 | 0.0056 | −18.478 | 9.4679 |
| UKF | 0.302 | 0.0118 | −0.253 | 0.0068 | 8.935 | 7.6143 |
| Optimized UKF | −0.123 | 0.0127 | 0.102 | 0.0059 | −4.239 | 4.8291 |
| Without error compensation | 0.45° | 0.25° | 0.35° |
| With error compensation | 0.12° | 0.10° | 0.05° |
| Without error compensation | 0.90° | 0.70° | 0.70° |
| With error compensation | 0.20° | 0.15° | 0.08° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Fang, X.; Song, Y.; Liang, M.; Chen, N. Study on the Shearer Attitude Sensing Error Compensation Method Based on Strapdown Inertial Navigation System. Appl. Sci. 2022, 12, 10848. https://doi.org/10.3390/app122110848
Wu G, Fang X, Song Y, Liang M, Chen N. Study on the Shearer Attitude Sensing Error Compensation Method Based on Strapdown Inertial Navigation System. Applied Sciences. 2022; 12(21):10848. https://doi.org/10.3390/app122110848
Chicago/Turabian StyleWu, Gang, Xinqiu Fang, Yang Song, Minfu Liang, and Ningning Chen. 2022. "Study on the Shearer Attitude Sensing Error Compensation Method Based on Strapdown Inertial Navigation System" Applied Sciences 12, no. 21: 10848. https://doi.org/10.3390/app122110848