
Mechanical Structure Design and Experimental Study of Gamma-ray Monitor for Small Satellite Payload
Abstract
:1. Introduction
2. Materials and Methods
2.1. Mechanical Structure Design of Novel GRM
2.2. Comparison of Traditional and Novel GRM
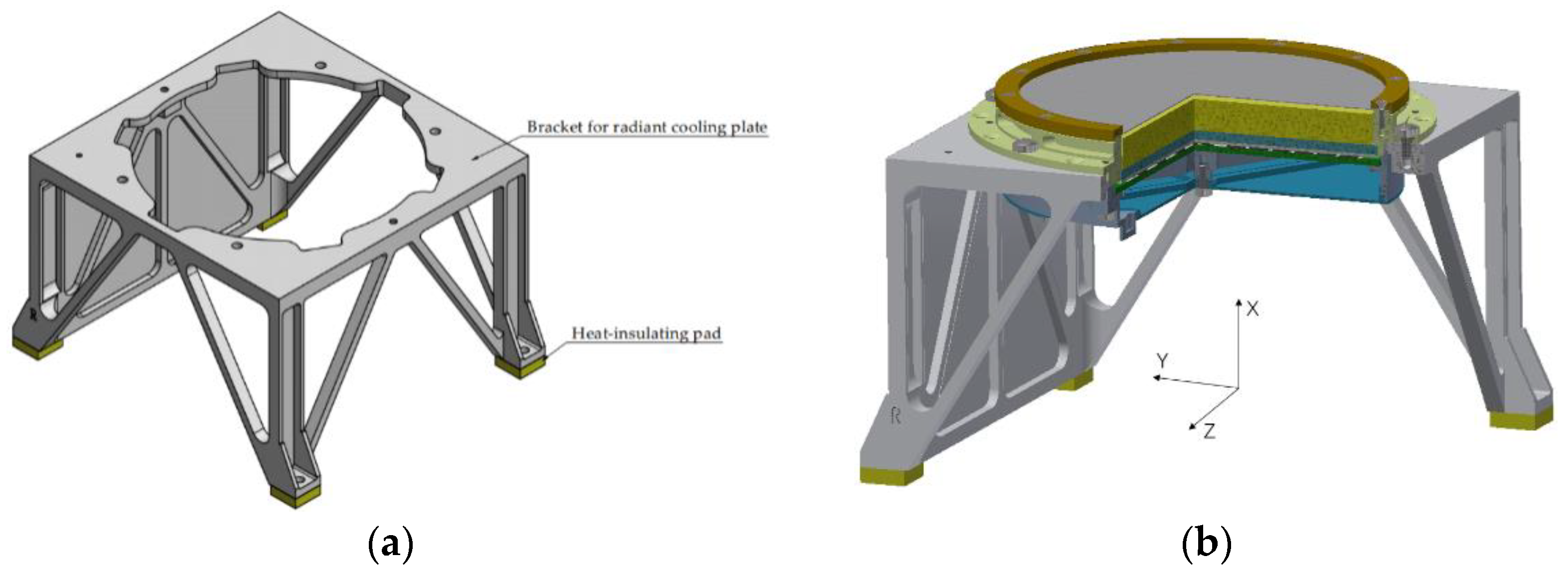
2.3. Mechanical Structure Design of the Bracket for the Radiant Cooling Plate
3. Modeling
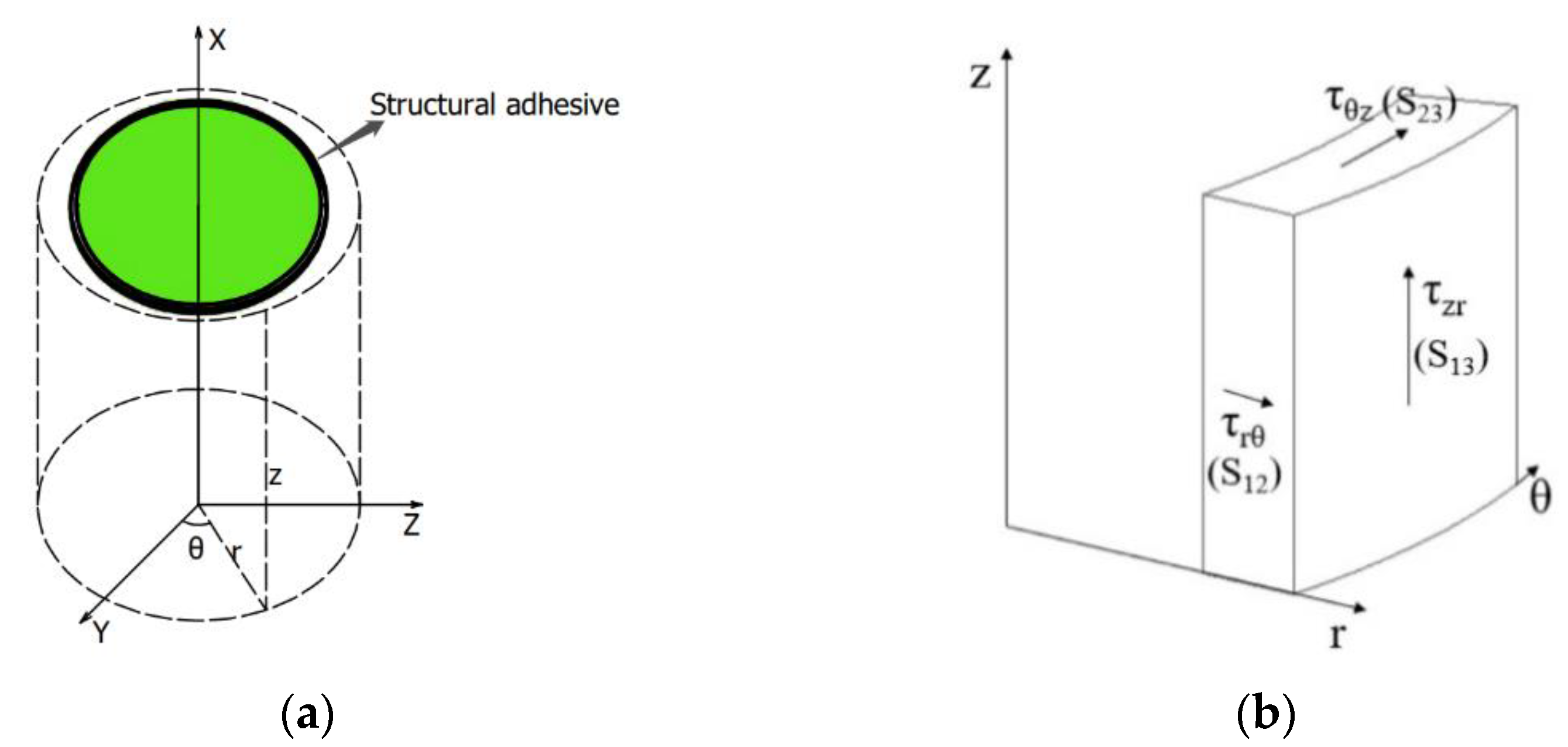
3.1. Structural Finite Element Static Analysis Equations
3.2. Structural Finite Element Dynamic Analysis Equations
3.2.1. Modal Analysis Equations
3.2.2. Sinusoidal Vibration Analysis Equations
3.2.3. Random Vibration Analysis Equations
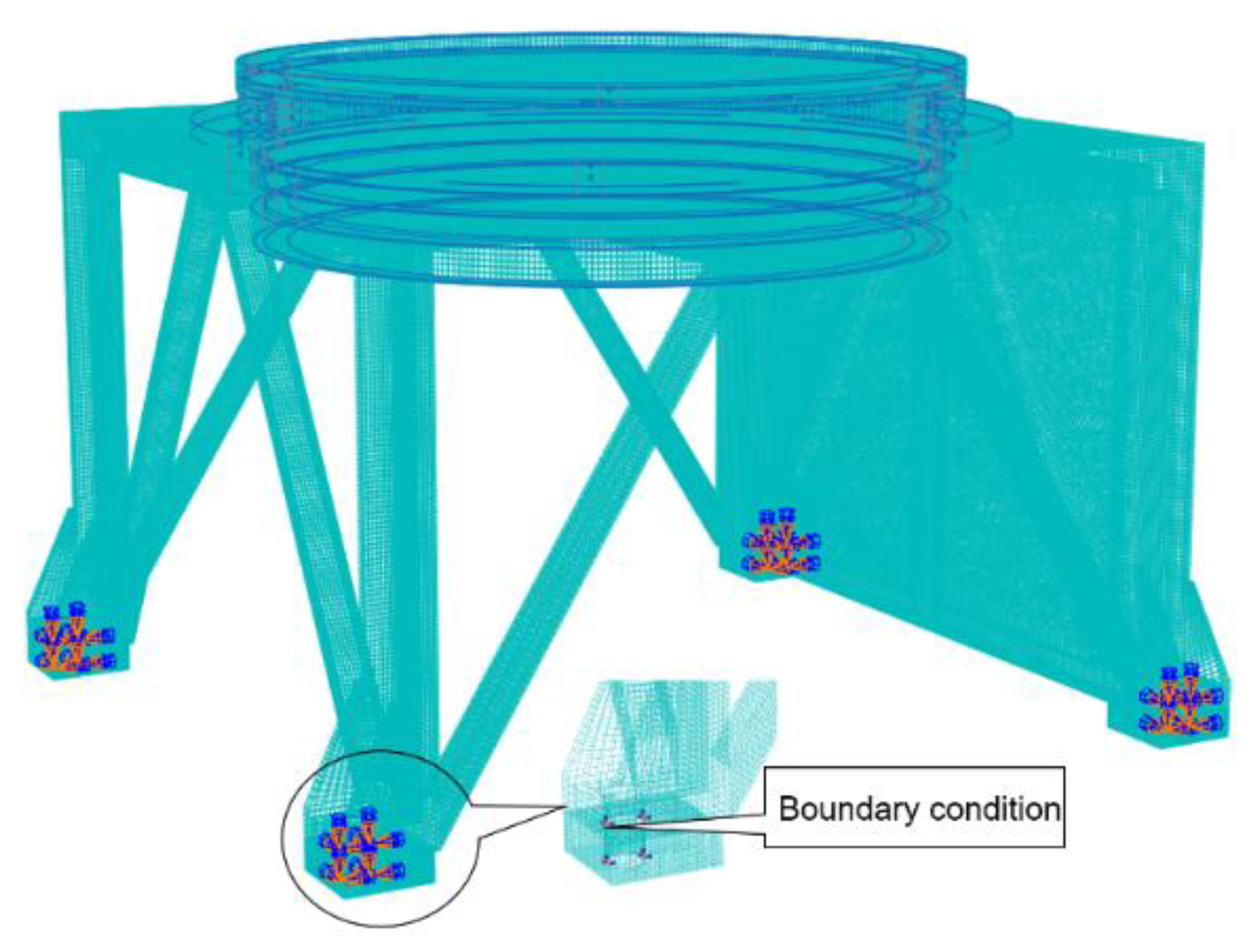
3.3. Establishment of Finite Element Model to the System
3.4. Material Parameters
3.5. Load and Boundary Conditions
4. Simulation and Experimental Results
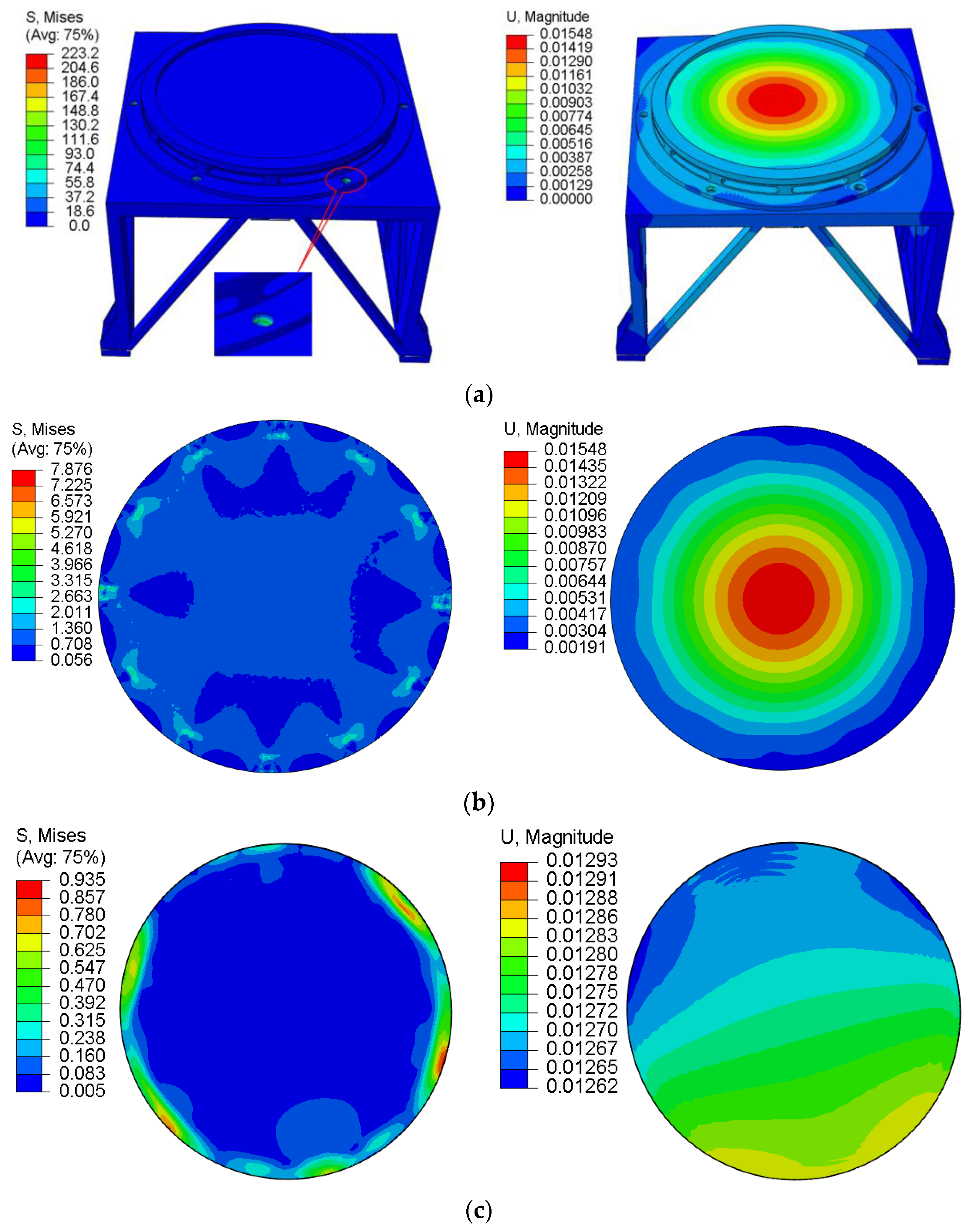
4.1. Static Analysis
4.2. Dynamical Analysis
4.2.1. Modal Analysis
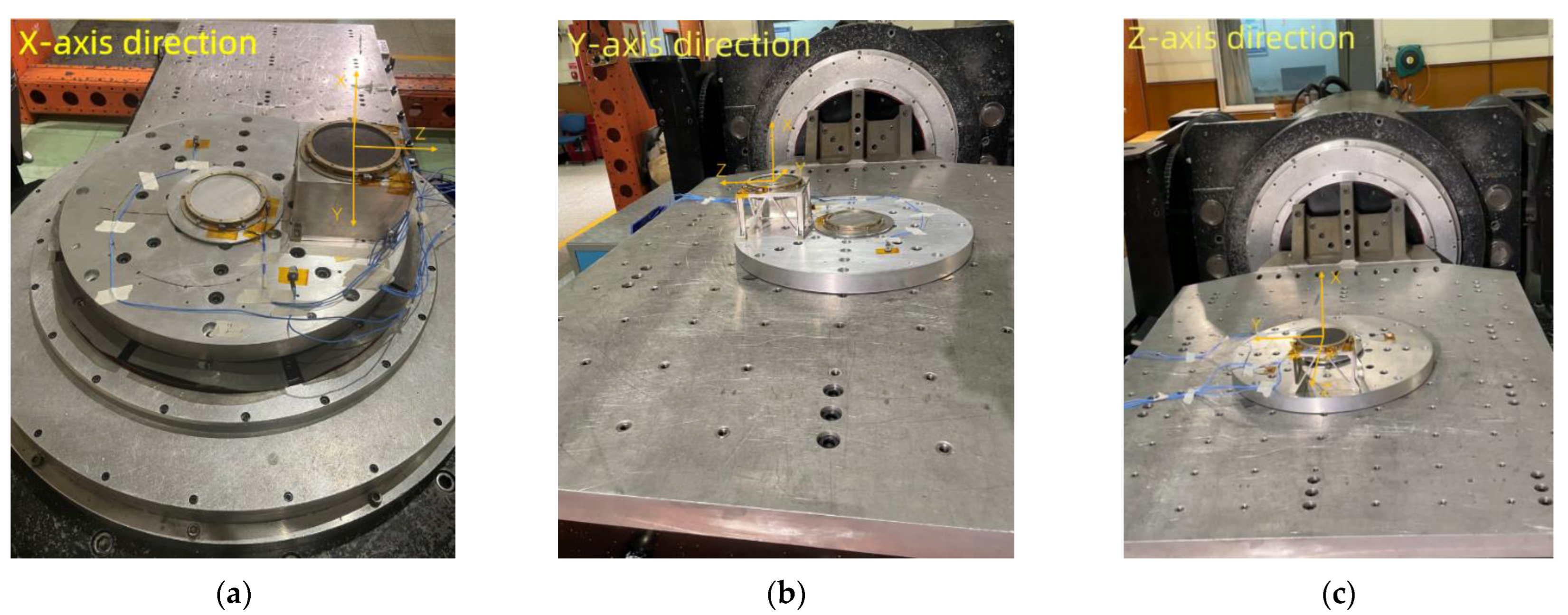
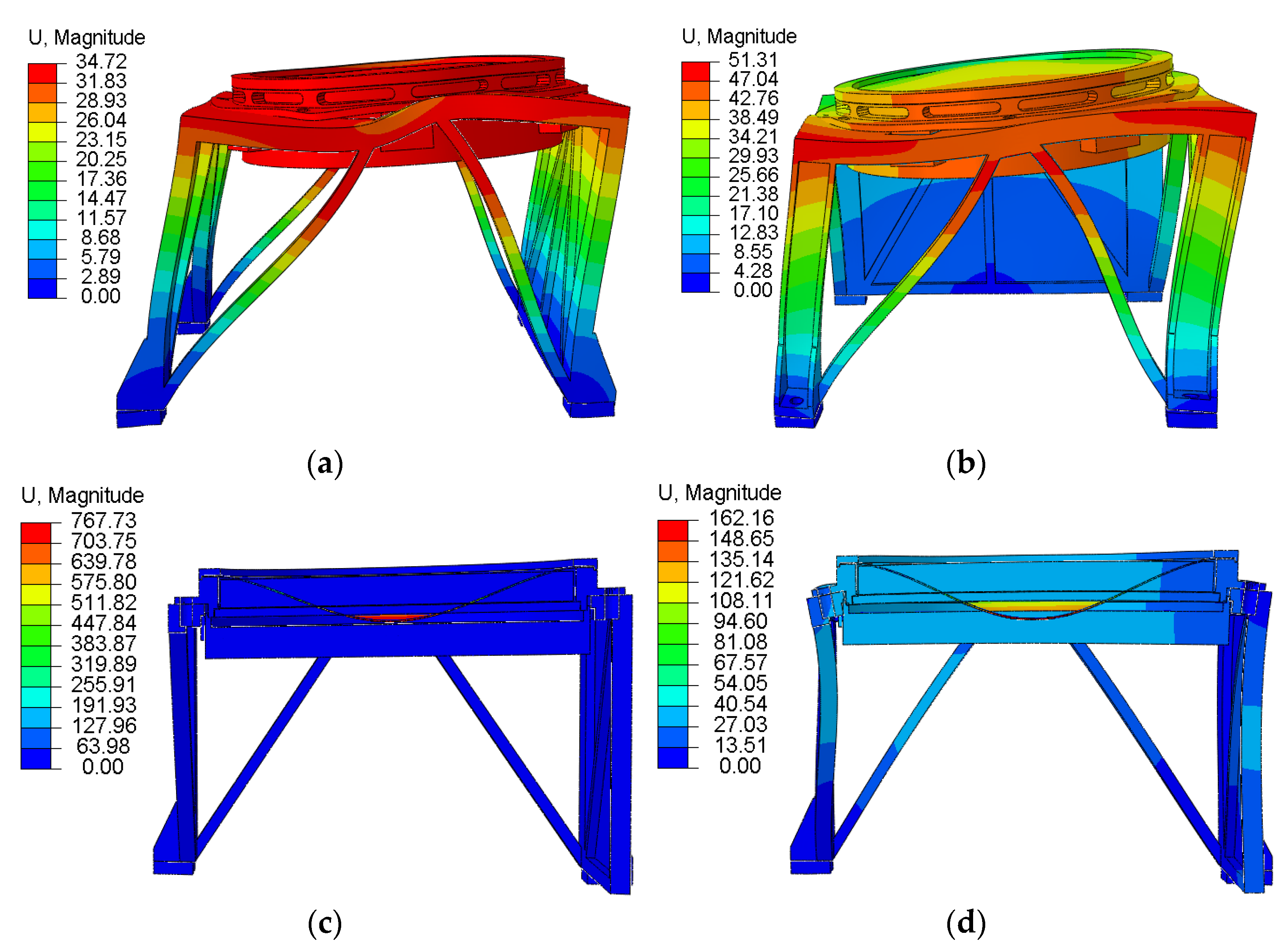
4.2.2. Sinusoidal Vibration Analysis
4.2.3. Random Vibration Analysis
- (1)
- The deviation of finite element modeling. In order to simplify the finite element calculation, the tie constraint and MPC algorithm are used to simulate the screw connection, so that the stiffness of the connection area is deviated from the actual stiffness. This is also the reason for the deviation between the natural frequencies obtained by the analysis of the test in each stage.
- (2)
- Uncertainty of modal damping selection. In the process of finite element simulation and calculation, the damping value was adopted the empirical value of 0.03, which deviates from the actual damping value of the model.
- (3)
- Test error. In the test stage, there is a coupling effect in the transmission process of random excitation applied by the vibration platform. There are deviations between the idealized treatment of factors (such as inter-part friction and inter-part clearance) and the random vibration test.
- (4)
- High frequency characteristics are more sensitive to structural details, and the finite element mesh needs to be gradually encrypted with the increase in frequency band width, but the calculation scale will expand rapidly, so the high frequency numerical results have large errors [36].
5. Discussion
6. Conclusions
- (1)
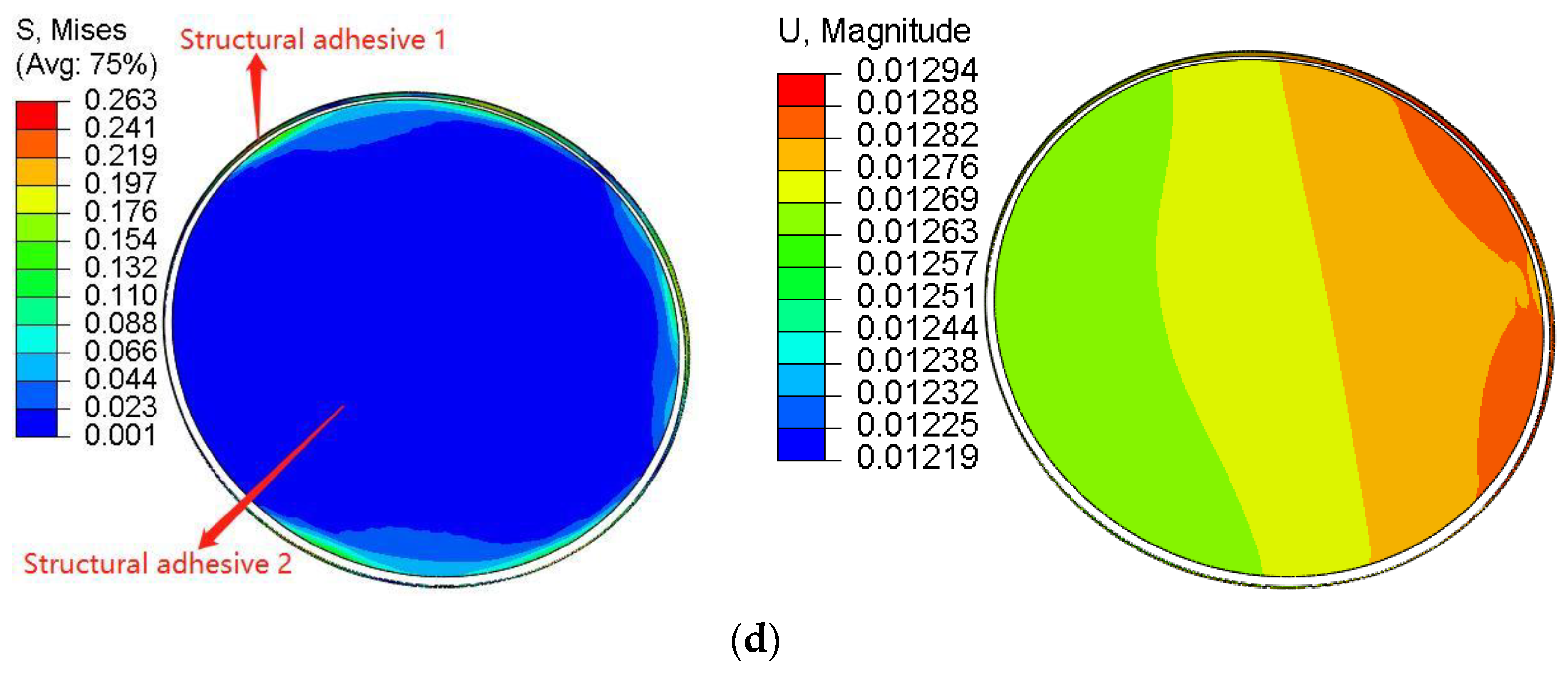
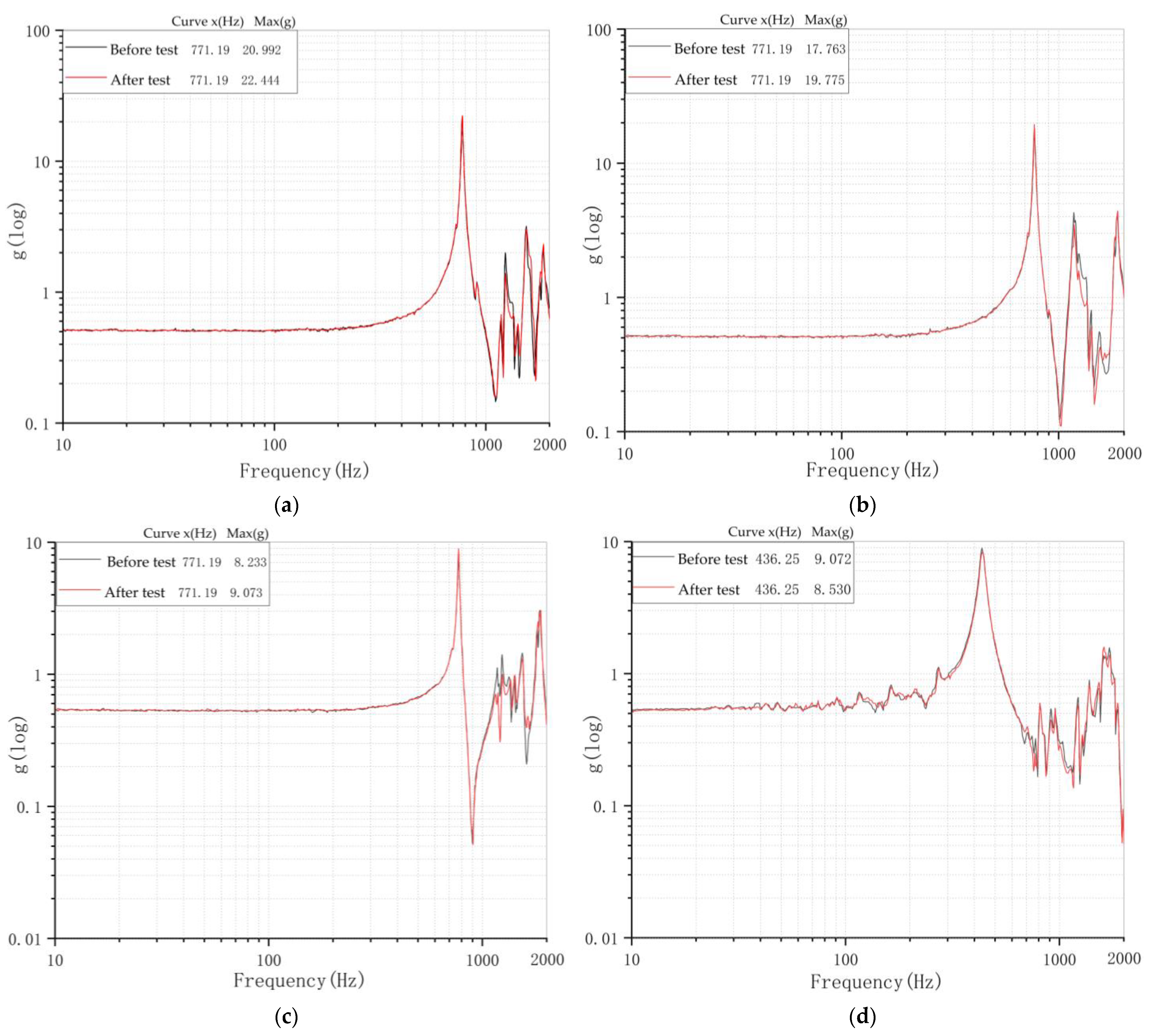
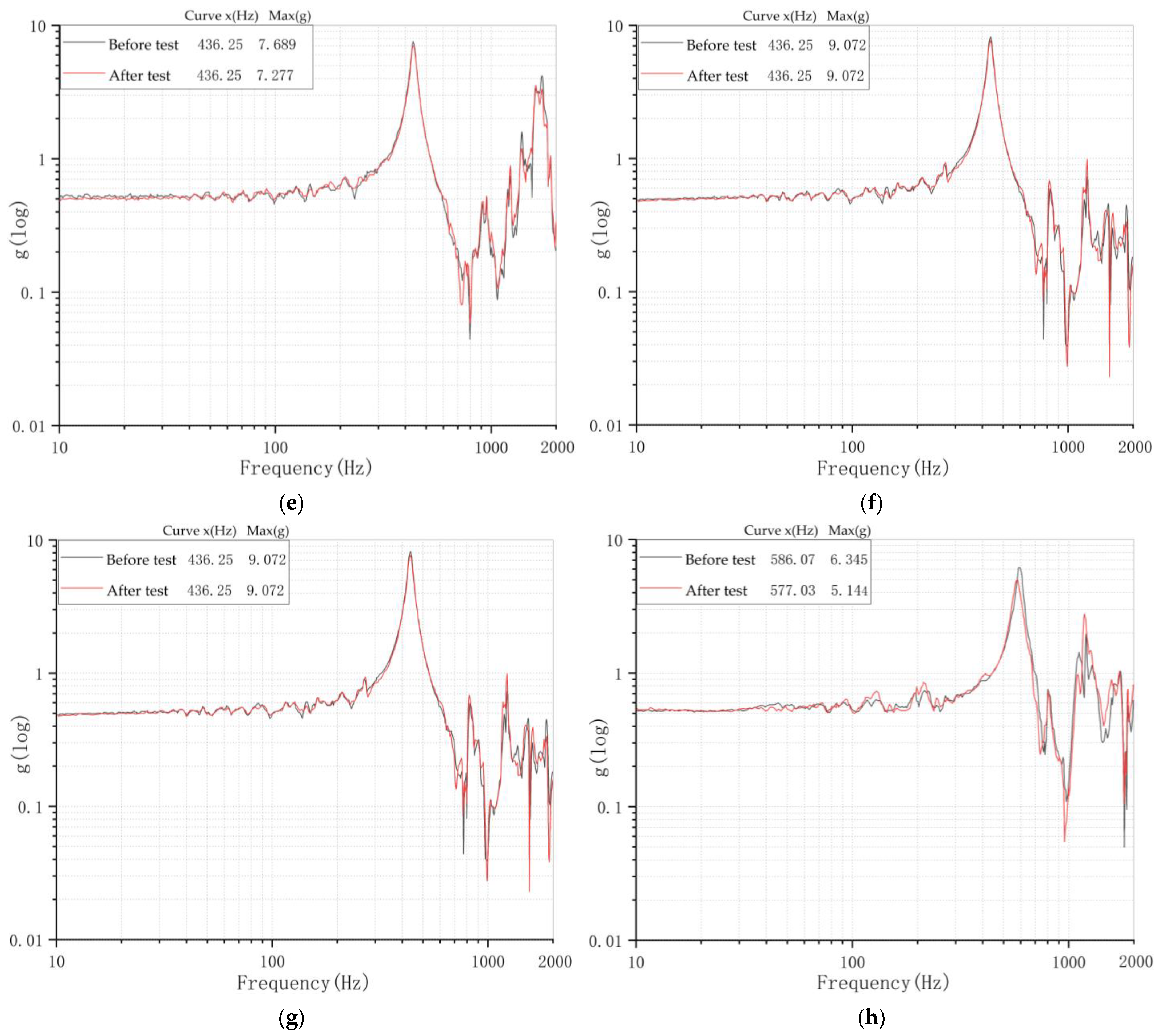
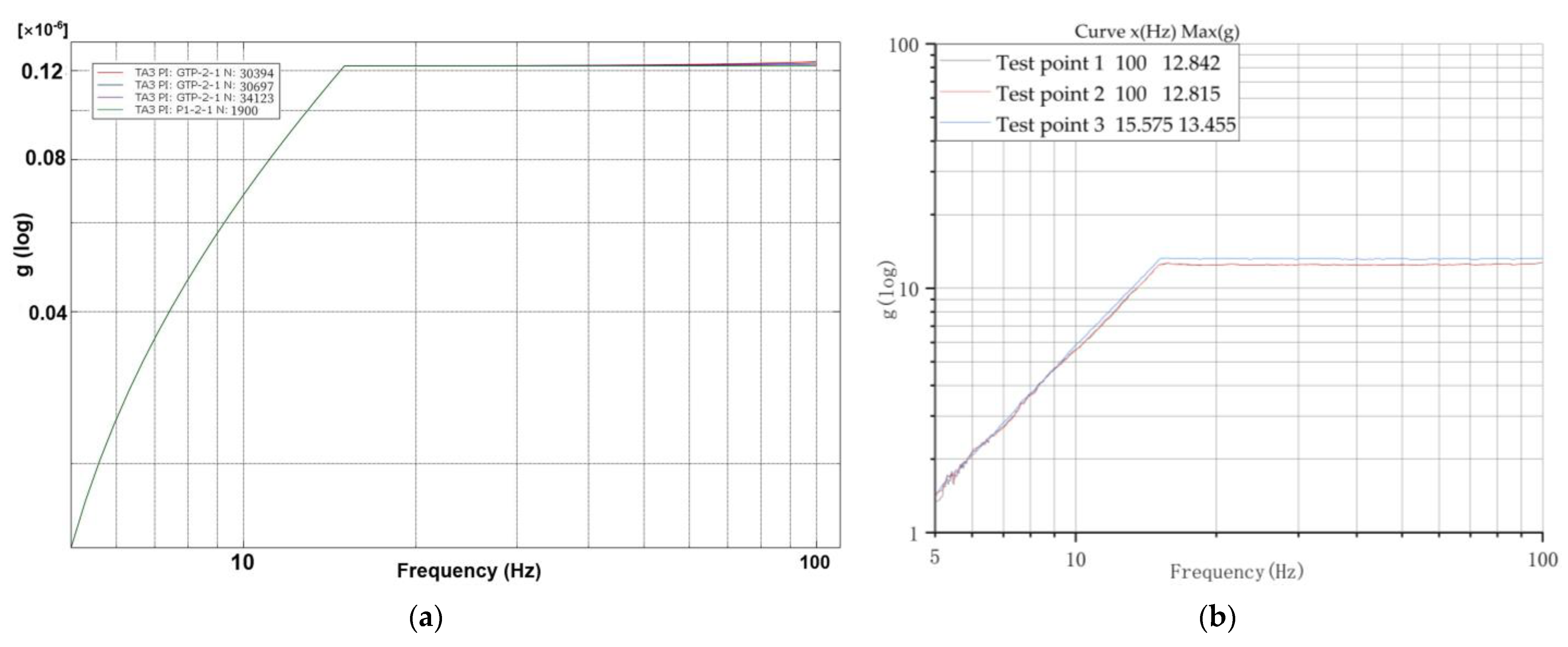
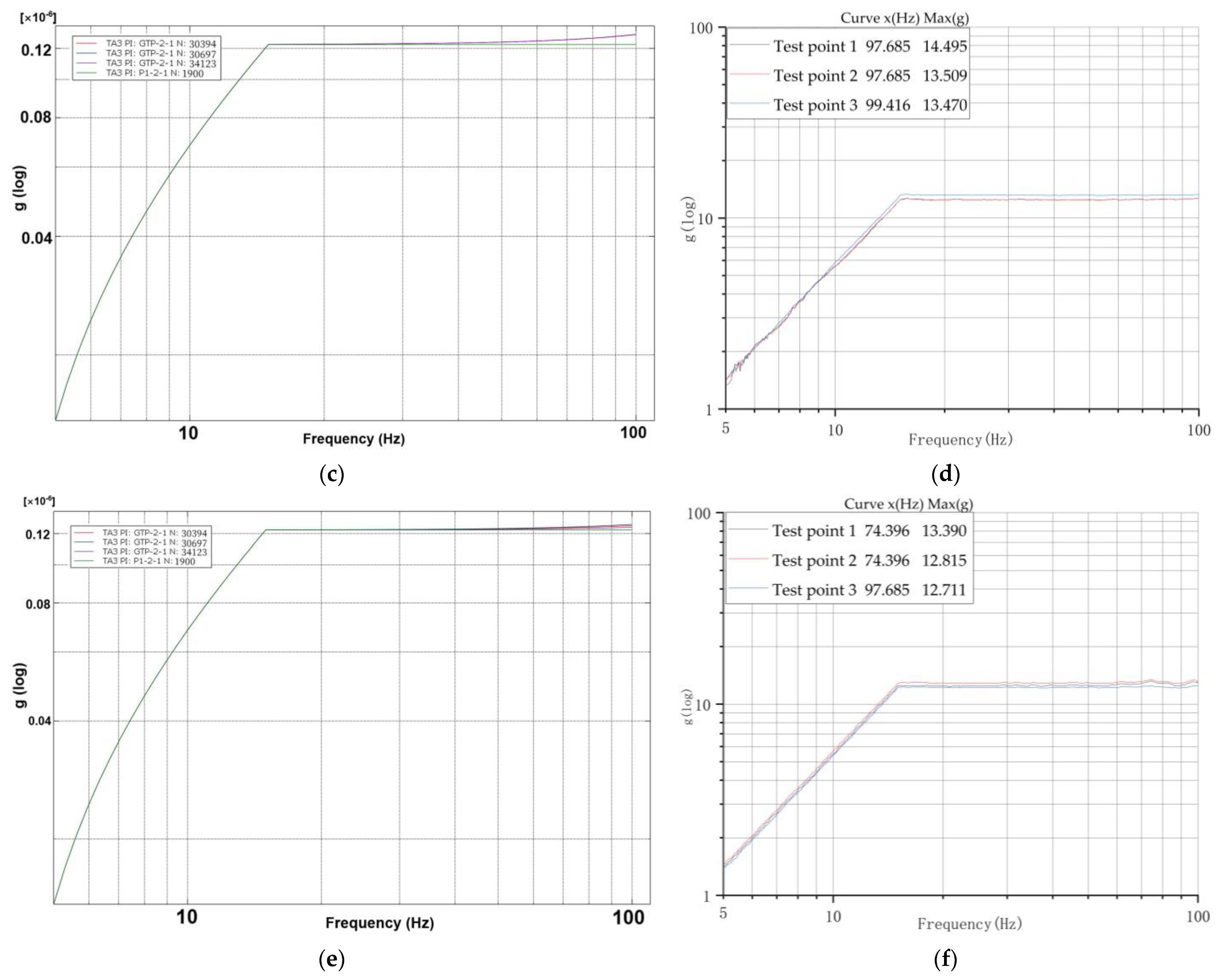
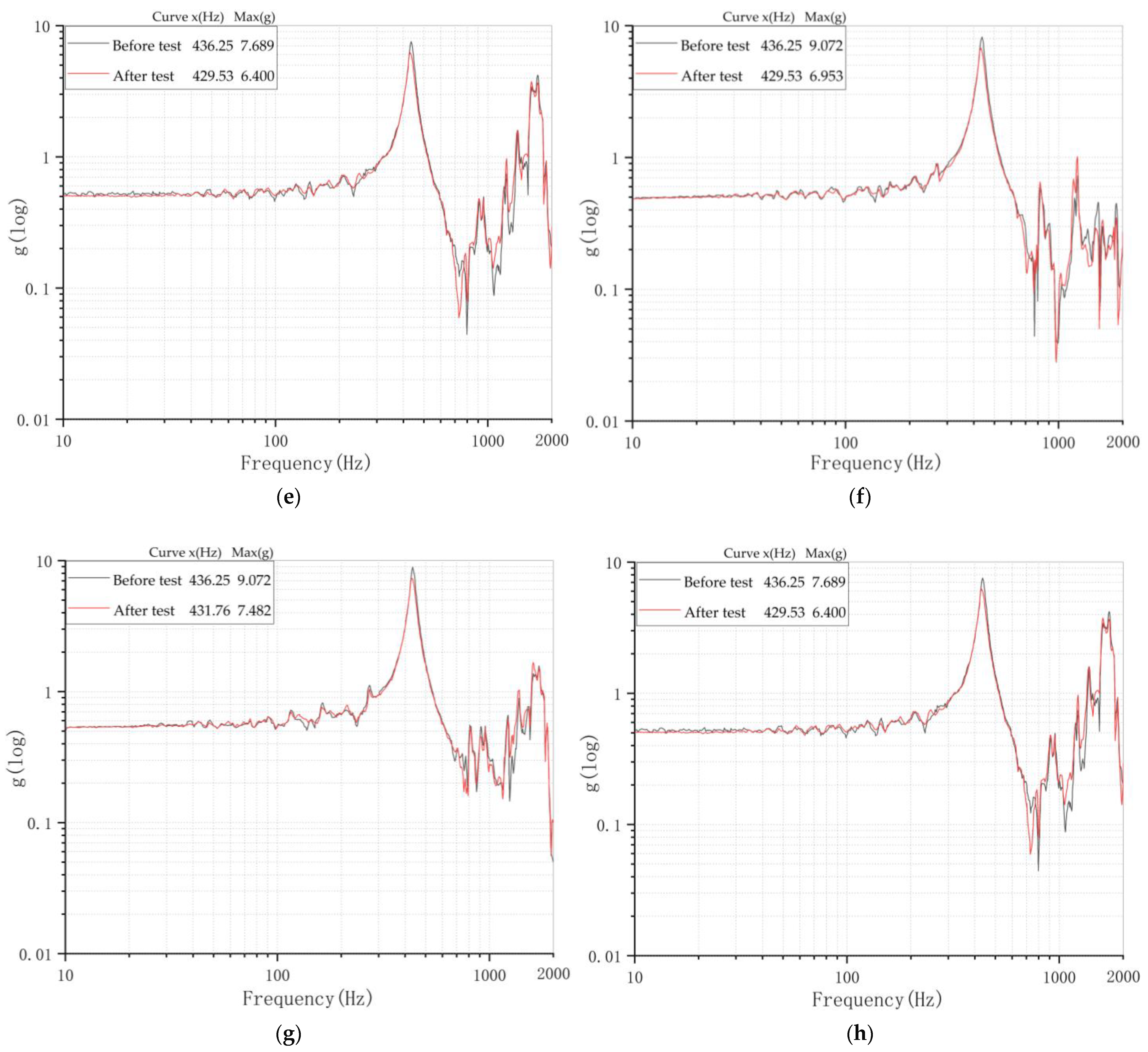
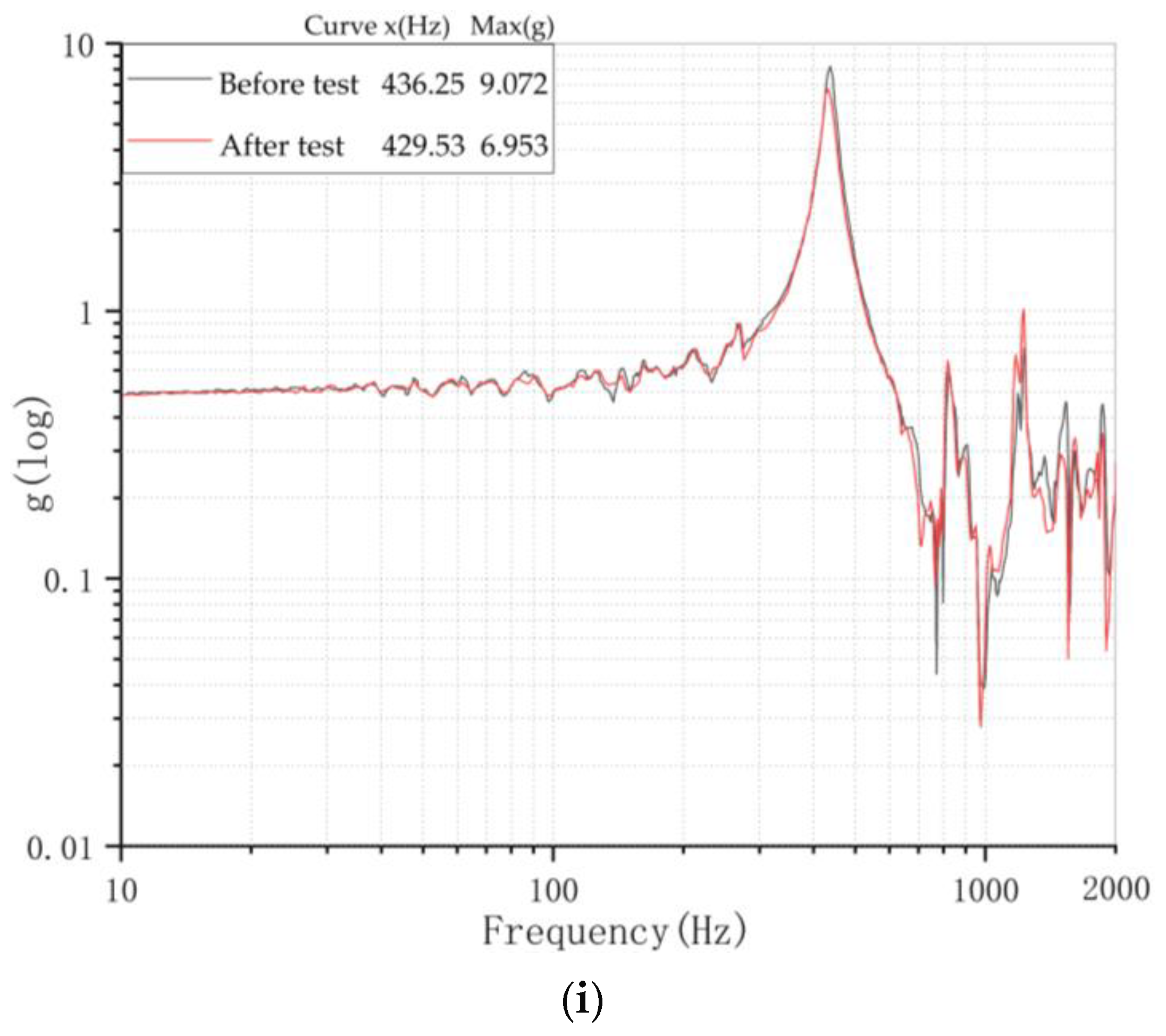
- From the static strain cloud diagram, it can be found that the maximum displacement occurs at the center of the beryllium sheet of 15.48 μm, the maximum deformation is in the elastic deformation stage of the material, and the calculation result of the safety margin is dozens of times the specified standard.The sinusoidal characteristic sweep frequency test shows that the frequency of the first order main mode of the structure is 436.25 Hz, which is greater than the 100 Hz specified in the spacecraft. Through the sinusoidal characteristic frequency sweep before and after the mechanical vibration test, it is concluded that the first order frequency change in X, Y and Z directions of the structure is not more than the 5% specified for the spacecraft, which shows that the structure is not damaged under the mechanical vibration test. From the results discussed above, the stiffness and strength of the structure designed in this paper meet the mission requirements.
- (2)
- The empirical value of 0.03 adopted in the finite element calculation is deviated from the actual value. The finite element model is modified using the damping value calculated from the vibration test and half-power bandwidth method. The modified calculation results are in high agreement with the experimental values, which provides a damping reference value for the subsequent finite element calculation.
- (3)
- The comparison between modal analysis and sinusoidal characteristic sweep frequency test shows that the first order frequency error in each direction is within the allowable error range of 10% in the engineering analysis. The first order frequency is 420.25 Hz, which meets the requirement that the product must be greater than 100 Hz.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Frontera, F.; Costa, E.; Fiume, D.D.; Feroci, M.; Nicastro, L.; Orlandini, M.; Palazzi, E.; Zavattini, G. The high energy instrument PDS on-board the BeppoSAX X-ray astronomy satellite. Astron. Astrophys. Suppl. Ser. 1997, 122, 357–369. [Google Scholar] [CrossRef] [Green Version]
- Matsuoka, M.; Kawai, N.; Yoshida, A.; Tamagawa, T.; Torii, K.; Shirasaki, Y.; Ricker, G.; Doty, J.; Vanderspek, R.; Crew, G.; et al. The gamma-ray burst alert system and the results of HETE-2. Balt. Astron. 2004, 13, 201–206. [Google Scholar]
- Tavani, M.; Barbiellini, G.; Argan, A.; Auricchio, N.; Bernabeo, A.; Bulgarelli, A.; Caraveo, P.A.; Celesti, E.; Chen, A.W.; Cocco, V.; et al. The AGILE instrument. In Proceedings of the Conference on X-ray and Gamma-ray Telescopes and Instruments for Astronomy, Waikoloa, HI, USA, 24–28 August 2003; pp. 1151–1162. [Google Scholar]
- Barbiellini, G.; Tavani, M.; Argan, A.; Auricchio, N.; Caraveo, P.; Chen, A.; Cocco, V.; Costa, E.; Di Cocco, G.; Fedel, G.; et al. The AGILE scientific instrument. In Proceedings of the Gamma-ray Astrophysics 2001 Symposium, Baltimore, MD, USA, 4–6 April 2001; pp. 774–778. [Google Scholar]
- Tavani, M.; Barbiellini, G.; Caraveo, P.; Cocco, V.; Costa, E.; Di Cocco, G.; Labanti, C.; Longo, F.; Mereghetti, S.; Morselli, A.; et al. The AGILE contribution to GRBs studies. Astron. Astrophys. Suppl. Ser. 1999, 138, 569–570. [Google Scholar] [CrossRef]
- Vercellone, S.; Chen, A.W.; Cocco, V.; Feroci, M.; Galli, M.; Giuliani, A.; Lapshov, I.Y.; Lipari, P.; Longo, F.; Mereghetti, S.; et al. Imaging of high energy sources with AGILE. AIP Conf. Proc. 2001, 587, 764–768. [Google Scholar]
- Bhat, P.N.; Meegan, C.A.; Lichti, G.G.; Briggs, A.S.; Connaughton, V.; Diehl, R.; Fishman, G.J.; Greiner, J.; Kippen, R.M.; Kouveliotou, C.; et al. The Fermi Gamma-ray Burst Monitor Instrument. In Proceedings of the 6th Huntsville Symposium on Gamma-Ray Burst, Huntsville, AL, USA, 20–23 October 2009; p. 34. [Google Scholar]
- Fangjun, L.; Shuangnan, Z. The Hard X-ray Modulation Telescope—China’s first X-ray astronomical satellite. Physics 2017, 46, 341–347. [Google Scholar]
- YongWei, D.; BoBing, W.; Li, Y.; Zhang, Y.; Zhang, S. SVOM gamma ray monitor. Sci. China-Phys. Mech. Astron. 2010, 53, 40–42. [Google Scholar]
- Wen, J.; Long, X.; Zheng, X.; An, Y.; Cai, Z.; Cang, J.; Che, Y.; Chen, C.; Chen, L.; Chen, Q. GRID: A student project to monitor the transient gamma-ray sky in the multi-messenger astronomy era. Exp. Astron. 2019, 48, 77–95. [Google Scholar] [CrossRef] [Green Version]
- Tajima, H.; Watanabe, S.; Fukazawa, Y.; Blandford, R.D.; Enoto, T.; Goldwurm, A.; Hagino, K.; Hayashi, K.; Ichinohe, Y.; Kataoka, J. Design and performance of Soft Gamma-ray Detector onboard the Hitomi (ASTRO-H) satellite. J. Astron. Telesc. Instrum. Syst. 2018, 4, 021411. [Google Scholar] [CrossRef] [Green Version]
- Frank, J.; Beitler, C.; Pietschner, D.; Strecker, R.; Antonelli, V.; Plattner, M.; Meidinger, N. Structural Analysis of Athena WFI Large Detector Array. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation Conference, Los Angeles, CA, USA, 14–18 December 2021; Volume 11444. [Google Scholar]
- Mangan, J.; Murphy, D.; Dunwoody, R.; Ulyanov, A.; Thompson, J.; Javaid, U.; O’Toole, C.; Doyle, M.; Emam, M.; Erkal, J.; et al. The environmental test campaign of GMOD: A novel gamma-ray detector. In Proceedings of the International Conference on Space Optics, Antibes, France, 30 March–2 April 2021; Volume 11852. [Google Scholar]
- Liu, R.; Zhu, C.; Chen, W.; He, T.; Zhang, A.M.; Xu, Y.P.; Yu, J.P.; Zhu, Z.C.; Zhang, S.N.; Lu, F.J. Mechanical design and analysis of the eXTP satellite. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation Conference, Los Angeles, CA, USA, 14–18 December 2021; Volume 11444. [Google Scholar]
- Zins; John, W. Structural Analysis of the Space Telescope Wide-Field/Planetary Camera (Wf/Pc). In Proceedings of the OE LASE’87 and EO Imaging Symposium, Los Angeles, CA, USA, 12–16 January 1987; Volume 0748. [Google Scholar]
- Jurcevich, B.; Bruner, M.; Gowen, K. Structural mechanics of the solar-A soft X-ray telescope. Design of optical instruments. In Proceedings of the Meeting, Orlando, FL, USA, 22–24 April 1992; Volume 1690. [Google Scholar]
- Xue, Y.; Chen, Z.; Zhixing, L.; Ge, J.; Longhui, L.; Weimin, Y.; Shuangnan, Z. The Finite Element Analysis Modeling of Micro Pore Optic Plate. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation Conference, Austin, TX, USA, 10–15 June 2018; Volume 10699. [Google Scholar]
- McClelland, R.; Carnahan, T.; Choi, M.; Robinson, D.; Saha, T. Preliminary design of the International X-ray Observatory flight mirror assembly. In Proceedings of the SPIE Optical Engineering + Applications Conference, San Diego, CA, USA, 2–6 August 2009; Volume 7437. [Google Scholar]
- McClelland, R.; Carnahan, T.; Robinson, D.; Zhang, W. Design and analysis of the International X-Ray Observatory mirror modules. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation Conference, San Diego, CA, USA, 27 June–2 July 2010; Volume 7732. [Google Scholar]
- McClelland, R.; Powell, C.; Saha, T.; Zhang, W. Design and analysis of mirror modules for IXO and beyond. In Proceedings of the SPIE Optical Engineering + Applications Conference, San Diego, CA, USA, 21–25 August 2011; Volume 8147. [Google Scholar]
- Jimenez-Martinez, M.; Alfaro-Ponce, M. Effects of synthetic data applied to artificial neural networks for fatigue life prediction in nodular cast iron. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 10. [Google Scholar] [CrossRef]
- Yang, Q.W.; Sun, B.X.; Lu, C. An improved spectral decomposition flexibility perturbation method for finite element model updating. Adv. Mech. Eng. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Jifeng, D.; Zengyao, H.; Xingrui, M. Research evolution on the test verification of spacecraft dynamic model. Adv. Mech. 2012, 42, 395–405. [Google Scholar]
- Jun-Yao, L.; Song, G.; Shan-bo, C. Mechanical Analysis of Microsatellite Structure Design Based on Moon Jellyfish. Comput. Simul. 2021, 38, 32–36.74. [Google Scholar]
- Chao-bo, L.; Jing-jun, L.; Zhen-hai, Z. Simplified Model and Response Analysis for Crankshaft of Air Compressor. In Proceedings of the 4th International Conference on Advanced Materials, Mechanics and Structural Engineering (AMMSE), Tianjin, China, 22–24 September 2017; Volume 269. [Google Scholar]
- Fulong, Z. The Structural Finite Element Analysis of the Mirror Module of eXTP-SFA/PFA; Institute of High Energy Physics Chinese Academy of Sciences: Beijing, China, 2021. [Google Scholar]
- Naito, T.; Tsuboi, H. A simplification method for reflective and rotational symmetry model in electromagnetic field analysis. IEEE Trans. Magn. 2001, 37, 3554–3557. [Google Scholar] [CrossRef]
- Hjelmervik, J.M.; Leon, J.-C. Simplification of FEM-Models on Cell BE. In Proceedings of the 7th International Conference on Mathematical Methods for Curves and Surfaces, Tonsberg, Norway, 26 June–1 July 2008; p. 261. [Google Scholar]
- Langer, P.; Jelich, C.; Guist, C.; Peplow, A.; Marburg, S. Simplification of Complex Structural Dynamic Models: A Case Study Related to a Cantilever Beam and a Large Mass Attachment. Appl. Sci. 2021, 11, 5428. [Google Scholar] [CrossRef]
- Yanqing, B.; Sankaran, M. Diagnosis of interior damage with a convolutional neural network using simulation and measurement data. Struct. Health Monit.-Int. J. 2022, 21, 2312–2328. [Google Scholar]
- Cheng, D. Mechanical Design Handbook, 5th ed.; Chemical Industry Publishing House: Beijing, China, 2007; pp. 6–10. [Google Scholar]
- Yuan, J. Satellite Structure Design and Analysis, 1st ed.; China Aerospace Publishing House: Beijing, China, 2004; Volume 1, pp. 163–203. [Google Scholar]
- Zhao, X.; Zhao, C.; Li, J.; Guan, Y.; Chen, S.; Zhang, L. Research on Design, Simulation, and Experiment of Separation Mechanism for Micro-Nano Satellites. Appl. Sci. 2022, 12, 5997. [Google Scholar] [CrossRef]
- Wang, J.; Li, T.; Zhao, H.; Ren, Q.; Zong, Y.; Liu, Q.; Fan, X. Dynamic Simulation and Vibration Test of the Active Potential Controller. In Proceedings of the 5th Asia Conference on Mechanical Engineering and Aerospace Engineering (MEAE), Wuhan, China, 1–3 June 2019; Volume 288. [Google Scholar]
- Jun, Z.; Yong, C.; ZhiYi, Z.; Hongxing, H. Research on the Random Vibration Test of the Satellite. J. Mech. Strength 2006, 28, 16–19. [Google Scholar]
- Guo-bin, M. Random Vibration Response Prediction of Some Spacecraft Attitude-Control Thruster Set. Aerospace 2007, 24, 54–57. [Google Scholar]
- Mahamdi, A.; Benkouda, S.; Aris, S.; Denidni, T.A. Resonant Frequency and Bandwidth of Superconducting Microstrip Antenna Fed through a Slot Cut into the Ground Plane. Electronics 2021, 10, 147. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Number of Elements | Number of Deformed Elements | Deformed Ratio (%) |
|---|---|---|---|
| Bracket for radiant cooling plate | 333,632 | 12,486 | 3.7 |
| Crystal box | 37,095 | 1734 | 4.67 |
| Sodium iodide crystal | 15,930 | 0 | 0 |
| Quartz | 6844 | 0 | 0 |
| Be sheet | 25,464 | 0 | 0 |
| Be sheet gland | 4943 | 0 | 0 |
| Structural adhesive 1 | 12,574 | 174 | 1.384 |
| Structural adhesive 2 | 1128 | 0 | 0 |
| Electronic box | 93,619 | 1592 | 1.7 |
| Heat-insulating pads | 8620 | 0 | 0 |
| Total | 539,849 | 15,968 | 2.96 |
| Component | Materials | Density (g/cm3) | Elastic Modulus (E/MPa) | Poisson’s Ratio | Tensile Strength (MPa) |
|---|---|---|---|---|---|
| Bracket for radiant cooling plate | ZK61M | 1.8 | 43,000 | 0.34 | 280 |
| Electronic box | 2A12-H112 | 2.8 | 68,000 | 0.33 | 390 |
| Sodium iodide crystal | NaI | 3.671 | 20,000 | 0.314 | / |
| Be sheet | Be | 1.85 | 290,000 | 0.08 | 180 |
| Be sheet gland | ZK61M | 1.8 | 43,000 | 0.34 | 280 |
| Crystal box | ZK61M | 1.8 | 43,000 | 0.34 | 280 |
| Quartz | K9 | 2.51 | 82,000 | 0.206 | 1050 |
| Structural adhesive | GN522 | 1.03 | 1.2 | 0.48 | 2 (Shear stress) |
| Heat-insulating pad | FR4 | 1.8 | 25,000 | 0.2 | 300 |
| Frequency Range (Hz) | Vibration Magnitude (o-p) g | Sweep Frequency Direction | Loading Rate | |
|---|---|---|---|---|
| Quasi-accreditation level | 5–15 | 13.8 mm | X, Y, Z | 2 oct/min |
| 15–100 | 12.5 g |
| Frequency Range (Hz) | Acceleration Power Spectral Density | Grms (g2/Hz) | Direction | Vibration Time | |
|---|---|---|---|---|---|
| Quasi-accreditation level | 10–150 | +6 dB/oct. | 10.575 | X, Y, Z | 180 s/direction |
| 150–800 | 0.0782 g2/Hz | ||||
| 800–2000 | −3 dB/oct. |
| Name | Materials | Maximum Stress (MPa) | Safety Margin (MS) |
|---|---|---|---|
| Structural adhesive | GN522 | 0.263 | 4.07 |
| Photoconductive glass | K9 | 0.94 | >10 |
| Beryllium sheet | Be | 7.88 | >10 |
| Direction | Modal Analysis (Hz) | Modal Test (Hz) | Relative Error |
|---|---|---|---|
| X | 732.34 | 771.19 | 5.04% |
| Y | 420.25 | 436.25 | 3.67% |
| Z | 615.66 | 586.07 | −4.80% |
| Measurement Points | Categories | X-Direction | Y-Direction | Z-Direction | |||
|---|---|---|---|---|---|---|---|
| g | Magnification | g | Magnification | g | Magnification | ||
| 1 | Analysis | 12.67 | 1.01 | 13.27 | 1.06 | 12.91 | 1.03 |
| Test | 12.84 | 1.03 | 14.5 | 1.16 | 13.39 | 1.07 | |
| Error | 1.3% | 8.5% | 3.6% | ||||
| 2 | Analysis | 12.75 | 1.02 | 13.25 | 1.06 | 12.82 | 1.03 |
| Test | 12.82 | 1.03 | 13.51 | 1.08 | 12.82 | 1.03 | |
| Error | 0.5% | 1.9% | 0% | ||||
| 3 | Analysis | 12.59 | 1.01 | 13.27 | 1.06 | 12.69 | 1.015 |
| Test | 13.46 | 1.08 | 13.47 | 1.077 | 12.71 | 1.02 | |
| Error | 6.5% | 1.5% | 0.1% | ||||
| Measurement Points | Categories | X-Direction | Y-Direction | Z-Direction | |||
|---|---|---|---|---|---|---|---|
| Grms (g2/Hz) | Magnification | Grms (g2/Hz) | Magnification | Grms (g2/Hz) | Magnification | ||
| 1 | Analysis | 37.50 | 3.55 | 29.07 | 2.75 | 32.66 | 3.09 |
| Test | 56.16 | 5.31 | 29.31 | 2.77 | 54.29 | 5.13 | |
| Error | −33% | −0.8% | −39.8% | ||||
| 2 | Analysis | 27.90 | 2.64 | 29.81 | 2.82 | 46.98 | 4.44 |
| Test | 57.04 | 5.39 | 25.81 | 2.44 | 47.31 | 4.47 | |
| Error | −51% | 15% | −0.7% | ||||
| 3 | Analysis | 15.85 | 1.50 | 29.80 | 2.82 | 23.95 | 2.26 |
| Test | 25.32 | 2.39 | 33.16 | 3.14 | 29.69 | 2.81 | |
| Error | −37% | −10% | −19% | ||||
| Measurement Points | Categories | X-Direction | Y-Direction | Z-Direction | |||
|---|---|---|---|---|---|---|---|
| Grms (g2/H) | Magnification | Grms (g2/Hz) | Magnification | Grms (g2/Hz) | Magnification | ||
| 1 | Analysis | 50.35 | 4.76 | 30.16 | 2.85 | 57.90 | 5.48 |
| Test | 56.16 | 5.31 | 29.31 | 2.77 | 54.29 | 5.13 | |
| Error | −10.4% | 2.9% | 6.6% | ||||
| 2 | Analysis | 57.67 | 5.45 | 29.4 | 2.78 | 42.90 | 4.06 |
| Test | 57.04 | 5.39 | 25.81 | 2.44 | 47.31 | 4.47 | |
| Error | 1.1% | 13.9% | −9.3% | ||||
| 3 | Analysis | 28.93 | 2.74 | 30.10 | 2.85 | 29.81 | 2.82 |
| Test | 25.32 | 2.39 | 33.16 | 3.14 | 29.69 | 2.81 | |
| Error | 14.2% | −9.2% | 0.4% | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, P.; Xin, H.; Yang, S.; Xiong, S.; Li, X.; An, Z.; Zhang, D. Mechanical Structure Design and Experimental Study of Gamma-ray Monitor for Small Satellite Payload. Appl. Sci. 2022, 12, 11025. https://doi.org/10.3390/app122111025
Guo P, Xin H, Yang S, Xiong S, Li X, An Z, Zhang D. Mechanical Structure Design and Experimental Study of Gamma-ray Monitor for Small Satellite Payload. Applied Sciences. 2022; 12(21):11025. https://doi.org/10.3390/app122111025
Chicago/Turabian StyleGuo, Pengfei, Hongbing Xin, Sheng Yang, Shaolin Xiong, Xinqiao Li, Zhenghua An, and Dali Zhang. 2022. "Mechanical Structure Design and Experimental Study of Gamma-ray Monitor for Small Satellite Payload" Applied Sciences 12, no. 21: 11025. https://doi.org/10.3390/app122111025