Abstract
Active suspension control and direct yaw-moment control (DYC) are widely used in the vehicle control field. To solve the coupling between those two controllers, a coordinated control of active suspension and DYC is proposed to further improve the vehicle roll and yaw stability. To enhance the adaptive ability of the active suspension, a proportional integral control optimized by the genetic fuzzy algorithm is introduced. DYC is proposed based on the sliding mode control. To restrain the chattering, the parameters of the sliding mode control is optimized by a genetic algorithm. Finally, a coordinated controller is presented based on the adaptive distribution of the anti-roll torque in the front and rear suspension. The simulation results show that the proposed active suspension and DYC can greatly improve the roll and yaw stability, respectively. The expected vehicle status can be well tracked. In addition, the coordinated control is compared by simply using two independent controllers under a different tire–road friction coefficient and different steering maneuver. The results show that the coordinated control has an even better performance under each working condition.
1. Introduction
In the era of the electrification of vehicles, multiple researches based on vehicle dynamics continuously emerge, particularly controls that use electrical drive units [1]. Among numerous control methods, active suspension is an effective way to restrain the body roll by generating an anti-roll torque from suspensions. Direct yaw-moment control (DYC) is able to improve the lateral stability by creating an additional yaw moment from each wheel. However, the active suspension control and DYC are not mutually independent but coupled with each other. When the active suspension controls the body roll, it also leads to a lateral transfer of the vertical load, which is an increase in the outer wheels and a decrease in the inner wheels. As a result, the average lateral force of the inner and outer wheels decreases. Accordingly, the lateral stability is affected. Traditional chassis controls usually focus on each subsystem separately, without considering the coupling between them. Consequently, it is hard to achieve the optimal overall performance of the vehicle.
At present, the studies on the active suspension control are mainly focused on driving comfort, while the studies on the vehicle roll control under a steering condition are relatively scarce. To meet the different requirements of driving comfort and safety under different road conditions, Han et al. proposed a road estimating algorithm based on the fuzzy proportional integral derivative (PID) control which can deal with the uncertainty of vehicle suspension parameters and road disturbance [2]. Fuzzy logic control (FLC) is widely used in the vehicle control field due to its excellent robustness. Kumar et al. took the velocity and acceleration of the front and rear wheels as the input and the active forces of suspension as the output of the FLC, which improves the driving comfort, safety, and handling [3]. Mrazgua et al. proposed a fuzzy fault-tolerant H-infinity control of active suspension based on the Takagi Sugeno model, which can solve actuator failures while effectively controlling the driving comfort and handling [4]. Considering the uncertainty of the adaptive backstepping for the nonlinear active suspension and the input delay of the actuator, Pang et al. proposed a novel adaptive backstepping controller, which can deal with the input delay of the actuator and achieve a better dynamic performance [5]. The mu-synthesis is used to optimize the active suspension vibration controller in the literature [6]. Compared with the H-infinity controller and passive suspension, it can further restrain the negative vibration of the active suspension system.
The DYC is a relatively mature technology which has been studied by many scholars. Park et al. presented a DYC controller composed of three control levels with the desired yaw moment as the intermediate value, which can improve the lateral stability and agility even at sharp steering [7]. Wang et al. added additional control items to the feedback of the traditional linear quadratic regulator (LQR) to reduce the model uncertainty and improve the interference immunity of the traditional LQR [8]. Yin et al. proposed a new torque distribution method based on the tire state and the yaw moment generating efficiency [9]. Through the method, the lateral force can be fully utilized and a better vehicle stability can be achieved. Zhang et al. proposed an adaptive DYC controller with fuzzy sliding mode control (SMC) and designed a continuous discrete sign function through fuzzy control so that the sign function can self-adjust adaptively [10]. Compared with the ordinary sliding mode control without optimization, chattering is effectively suppressed.
To improve the coordination performance between different control systems, controllers are usually integrated to get a better effect. For example, active front-wheel steering (AFS) and the DYC are generally integrated to improve the vehicle stability. The two-layer control structure is widely used in this field. The desired front-wheel steering angle and yaw moment are calculated in the upper layer while the real front-wheel steering angle and yaw moment are realized by actuators in the lower layer. Adaptive laws are used in the upper layer while the steering and braking system are controlled by a constraint optimization algorithm in the lower layer which leads to a better tracking performance and lower control efforts [11]. Meng et al. solved the additional steering angle and correction torque with a non-smooth control, which greatly improves the anti-interference capability of the controller [12]. In addition, a dual sliding mode control is used to calculate the additional steering angle and yaw moment while the Lagrange optimization algorithm is used in the distribution of the tire forces which effectively improves the handling of the vehicle [13]. In the literature [14], a multi-agent system (MAS) is introduced where AFS and the DYC act as agents that work together to improve the vehicle’s lateral stability and reduce the workloads of the drivers. At the same time, the Pareto-optimality theory is used to ensure the optimal performance of both AFS and the DYC. However, the vehicle uncertainties and time-varying parameters could affect the stability control performance. Accordingly, Cheng et al. proposed a robust linear matrix inequality (LMI)-based H-infinite feedback algorithm for the integration of AFS and the DYC [15]. Based on the active disturbance rejection control and SMC, Feng et al. proposed a coordinated controller of the DYC and AFS where an improved particle swarm optimization algorithm is used to obtain the coordination work weight [16]. As well as integrating AFS and the DYC, Liang et al. used a multi-constrained distributed model predictive control (MDMPC) to integrate the AFS and active suspension [17]. Hu et al. proposed a rule-based coordinated control of DYC and active suspension [18]. Tan et al. used the active suspension force and electronic stability program (ESP) brake torque to improve the yaw and roll stability [19]. The active suspension is also directly used to control the yaw stability [20,21]. Cho et al. proposed an improved electronic control suspension system consisting of multiple sensors and controllers that can improve the yaw–roll–pitch motion at the same time [22]. The AFS, DYC, active roll control (ARC) and AFS, DYC, and active suspension are, respectively, integrated in the literature [23,24]. In the literature [25], Zhao et al., integrated and optimized a differential steering system, differential braking system, and active suspension system by using an adaptive weight particle swarm optimization algorithm, which significantly improved the driving comfort and steering stability at the same time.
However, there are still some problems in this field such as the control chattering and overshoot, an insufficient control accuracy, an excessive control duration, tremendous computation, coupling effects between the controllers, and so on.
In this paper, we intend to explore a coordinated control that can combine active suspension and the DYC to further improve both the roll and yaw stability. The detailed contributions are summarized as: with the genetic and fuzzy algorithm optimized proportional integral (PI) active suspension, the body roll angle can be reduced up to 88% less than the passive suspension. With the genetic algorithm optimized sliding mode DYC, the yaw’s stability performance is good. More importantly, the chattering is greatly suppressed compared with the traditional SMC. Additionally, the proposed adaptive distribution strategy enables the active suspension and DYC to work in coordination. The roll and yaw stability performance are both further improved.
The rest of this article is organized as follows. Section 2 gives the modeling of a ten degree of freedom (10-DOF) vehicle model. In Section 3, the active suspension roll controller, genetic sliding mode DYC, and the coordinated control are developed. The simulation results are provided in Section 4 followed by the conclusions in Section 5.
2. 10-DOF Vehicle Dynamics Model
In this section, a 10-DOF vehicle model is established considering the lateral, longitudinal, yaw, vertical, roll, pitch, and vertical runout of four wheels. The modeling process makes the following assumptions: ignore the influence of the road slope, cross wind, and the impact of a suspension deformation and wheel alignment on the steering performance and assume that the front wheels are the only steering wheels, and the angles of the left and right front wheel are basically the same. The vehicle parameters are as Table 1.

Table 1.
Vehicle parameters in this paper.
The expressions of lateral, longitudinal, and yaw motion of the whole vehicle are:
where is the total mass, is the sprung mass, is the yaw rate, is the body roll angle, and are the longitudinal and lateral speed of the CG, is the altitude difference between the roll center and sprung mass CG, is the altitude difference between the pitch center and sprung mass CG, and are the longitudinal and lateral force of the th wheel, = 1, 2, 3, 4, representing the left front, the right front, the right rear, and the left rear wheel, is the front wheel steering angle, is the rolling resistance coefficient, is the frontal area, is the air resistance coefficient, is the rotating mass conversion factor, is the acceleration of gravity, and are the distance between the front, rear axles, and vehicle CG, is the yaw moment of inertia, and is the wheel track.
Vertical motion of sprung mass:
Vertical motion of unsprung mass:
Roll and pitch motion:
where is the vehicle vertical displacement, is the suspension force, =1, 2, 3, 4, representing the left front, the right front, the right rear, and the left rear suspension, and are the stiffness and damping coefficients of the th suspension, is the active force of the th suspension, is the vertical displacement of the unsprung mass at the th suspension, is the vertical displacement of the sprung mass at the th suspension, is the vertical displacement of the th wheel, is the unsprung mass at the th suspension, is the stiffness coefficient of the th wheel, and are the roll and pitch moment of inertia, and is the pitch angle.
The magic formula model is used for the tire state parameters computing. Additionally, its expressions are:
where is the longitudinal or lateral force, is the slip ratio or tire slip angle, and and are the horizontal and vertical drift of the formula curve. In this paper, it is assumed that the drift is zero. , , , and are the stiffness factor, shape factor, peak factor, and curvature factor.
The equations of the wheel torque and slip ratio are:
where is the wheel moment of inertia, , , , , and are the driving torque, braking torque, slip ratio, rotational speed, and wheel center speed of the th wheel, and is the rolling radius of the wheel. The expressions of the center speed of each wheel are:
The tire slip angle expression is:
where and are the slip angles of the front and rear wheels and is the sideslip angle.
The vertical load of the wheel consists of a static and dynamic load. The static load is determined by the weight distribution of the whole vehicle in a static state. The dynamic load is caused by the load transfer when there is an acceleration. Since the longitudinal speed is assumed to be constant in this paper, the lateral and vertical acceleration are the only factors to affect dynamic load. The expression of the vertical load is as:
3. Stability Based Coordinated Control of Active Suspension and DYC
In this section, the active suspension roll controller is designed to improve the vehicle roll stability. A genetic sliding mode DYC controller is designed to improve the vehicle’ yaw stability. Finally, a coordinated controller is designed to solve the coupling between the active suspension and DYC to improve the stability of the vehicle.
3.1. Active Suspension Roll Controller
Active suspension can produce an anti-roll torque by adjusting the active forces of the four suspensions. It can modify the body posture to avoid rollover accidents. For example, when the vehicle turns to the left, there will be a rightward roll tendency. What the active suspension does is to generate a reverse torque to suppress this tendency. The left and right suspensions, respectively, produce an active force with the same magnitude but the opposite direction. In Section 3.1, the active forces generated by the front and rear suspensions are the same. Then, the genetic fuzzy PI algorithm is used to design the roll controller. The flow chart is shown in Figure 1.
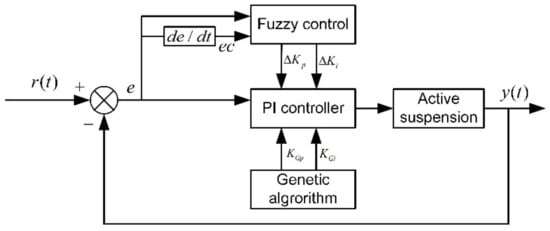
Figure 1.
Flow chart of genetic fuzzy PI algorithm.
The roll controller takes the error between the body roll angle and its ideal value which is zero as the input and the suspension active forces as the output. The initial parameters of the PI controller are optimized by the genetic algorithm. Additionally, fuzzy control is used to deal with the changes in the working conditions. The inputs are the error and its first derivative . So, the parameters are adaptively modified. The expression is:
where and are the initial proportional and integral coefficient optimized by the genetic algorithm and and are the correction value of and obtained by fuzzy control.
3.1.1. Initial Values Optimized by Genetic Algorithm
In order to further improve the roll stability, the body roll angle should be reduced as much as possible while ensuring that the dynamic displacement of the suspension and the tire are not too large. To achieve the maximum reduction in the energy consumption, the active force of the actuator is also considered. In addition, the overshoot and oscillation should be reduced as well. Therefore, the fitness function of the genetic algorithm is:
where is the simulation duration, to are the weight coefficient, and , , and are the average of the four suspension dynamic strokes, four tire dynamic displacements, and four suspension active forces, respectively.
The parameters of the genetic algorithm are shown in Table 2.
Table 2.
Parameters of genetic algorithm.
Additionally, the genetic optimization results are shown in Figure 2.
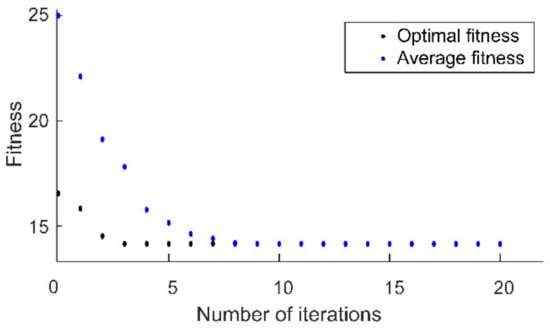
Figure 2.
Optimization results of fitness.
3.1.2. Universe and Membership Function of Fuzzy Control
The inputs of the fuzzy control are the error between the body roll angle and zero, and its first derivative. The outputs are the correction value and . The input and output of the fuzzy controller proposed in this paper are expressed by five fuzzy quantities including NB, NS, ZE, PS, and PB representing negative large, negative small, zero, positive small, and positive large, respectively. The input takes the generalized bell shape membership function, and the output takes the triangular membership function. The variation range of the correction amount of the fuzzy control output is taken as above or below 10% of the initial parameter.
3.2. Genetic Sliding Mode DYC
The DYC is able to produce an extra yaw moment by adjusting the longitudinal force of each wheel to improve the yaw’s stability. The flow chart of the proposed DYC controller is shown in Figure 3.
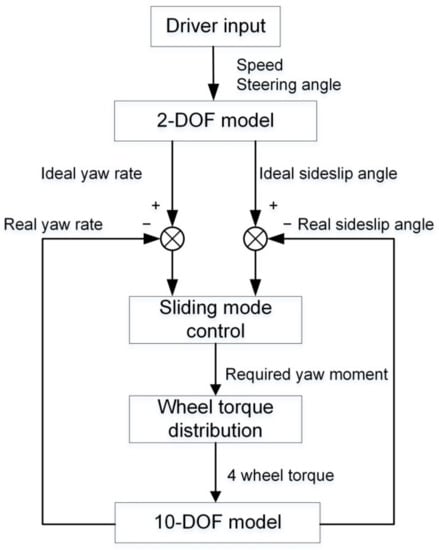
Figure 3.
Flow chart of genetic sliding mode DYC.
First, according to the 2-DOF model, the ideal vehicle yaw rate is:
where is the wheelbase and is the stability factor. The ideal value of the sideslip angle is 0.
The sliding mode control is used to track the ideal yaw rate and sideslip angle. The switching function is set as:
where and are the maximum allowable yaw rate error and the sideslip angle error, and is the weight coefficient ranging from 0 to 1.
Equation (23) uses variable normalization and absolute values for the two errors, solving the problem that the dimension of the weight coefficient is meaningless and falsely reaches the switching surface. The derivative of the above expression is:
To avoid excessive chattering, the exponential approaching law is taken:
where and are the approaching law parameters which are both greater than 0.
The total yaw moment is:
The total required yaw moment can be obtained from Equations (24)–(26):
To avoid chattering caused by the sign function, the saturation function is used to replace it.
where is the thickness of the boundary layer.
In order to further suppress the chattering of the sliding mode control, the genetic algorithm is used to optimize the and of the approaching law. The fitness function is:
where is the amount of simulation sampling points, and to are the weight coefficients.
The required yaw moment can be achieved by the longitudinal forces of four wheels. Additionally, the longitudinal force of the front and rear wheels is distributed according to the proportion of the vertical load of the front and rear wheels. For the computing of the driving/braking torque of the four wheels, we take the slip ratio as the intermediate variable. The target slip ratio is computed by the target longitudinal force. Then, track the target value by controlling the slip ratio to obtain the wheel torque.
According to the magic formula, the tire longitudinal force is affected by the tire slip angle , vertical load , tire–road friction coefficient , and slip ratio . The relationship is:
If , and are known, the relationship between and can be expressed as a univariate function. Additionally, the target slip ratio is:
Sliding mode control is used to track the target slip ratio, and the sliding mode surface is taken as:
The exponential approach law is taken:
where and are the approaching law parameters which are both greater than 0.
The wheel torque can be obtained from Equations (11), (12), (32), and (33):
Due to the constraint of the maximum value of the motor and braking torque, the wheel torque needs to meet:
where is the peak output torque of the motor. is the maximum braking torque of the brake.
3.3. Coordinated Controller
The lateral force is affected by the tire cornering stiffness . While the tire cornering stiffness is not fixed, it will change with the tire pressure and vertical load. Among them, the vertical load is affected by the active suspension. So, the working of the active suspension will affect the lateral force by affecting the vertical load.
When the active suspension creates an anti-roll torque, it also causes a load transfer between the left and right wheels. Figure 4 shows the influence of the vertical load on the tire cornering stiffness [26]. With the increase in the vertical load, the tire cornering stiffness increases at a decreasing speed. When the vertical load exceeds a certain limit, it decreases. Here, is the average of and . However, the cornering stiffness of B is greater than the average of A and C. It indicates that the vertical load transfer leads to a decrease in the average cornering stiffness. Additionally, the larger the difference between left and right is, the smaller the average lateral force is.
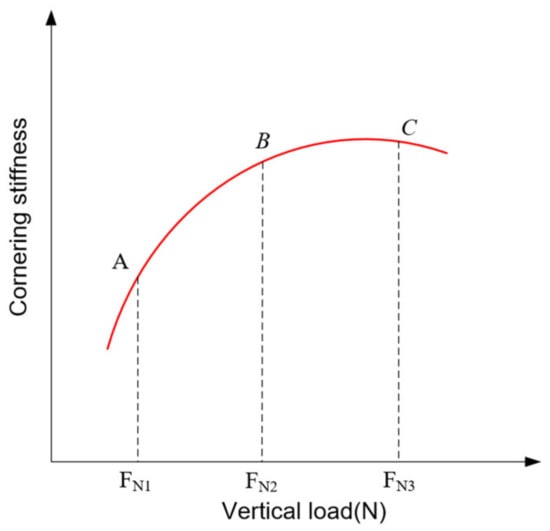
Figure 4.
The influence of vertical load on tire cornering stiffness.
For the active suspension, if more anti-roll torque is allocated to the front suspension, the vertical load difference between the two front wheels will increase. Then, the total lateral force of the front wheels will decrease, which tends to reduce the vehicle yaw rate. If more anti-roll torque is allocated to the rear axle, the vertical load difference between the two rear wheels will increase. The total lateral force of the rear wheels will decrease, which tends to increase the vehicle yaw rate. So, while tracking the expected yaw rate, in addition to the DYC, the active suspension can also play a role by adjusting the distribution of the anti-roll torque.
Based on this, a coordinated controller, as shown in Figure 5, is proposed to adjust the active forces distribution of the active suspension according to the state feedback of the vehicle yaw stability. For the coordinated controller, the deviation between the actual and expected value of the yaw rate is taken as the input. Additionally, the distribution of the anti-roll torque weight is the output. When the actual yaw rate is greater than the expected value, the yaw rate needs to be reduced. So, the anti-roll torque distribution weight of the front suspension should be increased. When the actual yaw rate is less than the expected value, the yaw rate needs to be increased. So, the anti-roll torque distribution weight of the rear suspension should be increased.
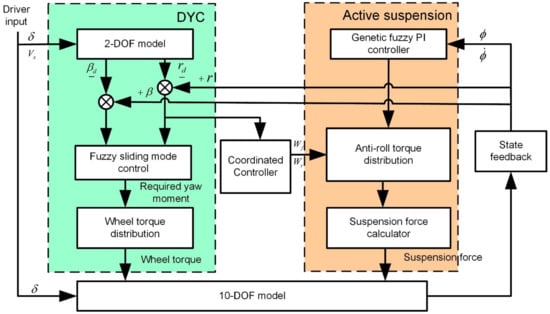
Figure 5.
Principle framework of active suspension and DYC coordinated control.
Based on the flow chart, Equation (36) is established for the coordinated controller as the distribution scheme of the anti-roll torque. Through the adaptive adjustment of the weight distribution coefficient, the active suspension can cooperate with the DYC controller which can further improve the yaw stability. The weight coefficients of the anti-roll torque distribution are defined as:
where and are the weight coefficient of the anti-roll torque in the front and rear suspension. is the control parameter.
Different from the active suspension roll controller in Section 3.1, an anti-roll torque distribution is introduced. When the active suspension controller receives the and from the coordinated controller, the required anti-roll torque from the PI controller is distributed according to the weight coefficients.
where and are the required anti-roll torque from the front and rear suspensions. is the total required anti-roll torque.
4. Simulation
This section describes the simulation results of the proposed active suspension roll controller, genetic sliding mode DYC, and coordinated control under different road and steering conditions in a MATLAB/Simulink environment. The MATLAB/Simulink version used in this paper is 2021a, and the computer processor is Intel (R) Core (TM) i5-8400 CPU @ 2.80 GHz. The relevant modeling and control parameters in Section 3 are shown in Table 3.
Table 3.
Modeling and control parameters in Section 3.
4.1. Active Suspension Roll Controller
To verify the effect of the fuzzy genetic PI roll controller proposed in Section 3.1, we compared it with a passive suspension under a ramp steering maneuver. The speed is set to 80 km/h, and the tire–road friction coefficient is 0.9. The steering wheel angel input is shown in Figure 6a, and the roll stability performance is shown in Figure 6b. Anti-roll torque is evenly distributed between the front and rear axles. So, the suspension force in the front and rear axles is the same, which is shown in Figure 6c.
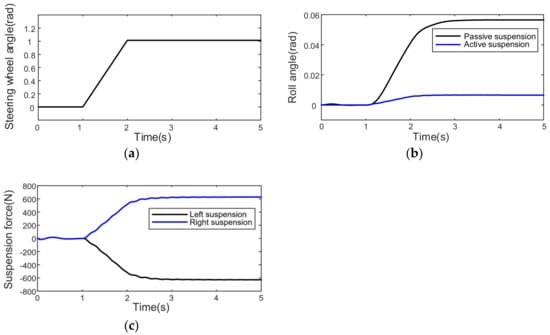
Figure 6.
Simulation of active suspension roll controller. (a) steering wheel angle; (b) roll angle; and (c) suspension force.
As shown in Figure 6b, when the passive suspension is used, the body roll angle is large, which is 0.056 rad. After the active suspension is applied, the body roll angle finally remains at 0.006 rad, which is 88% less than the passive suspension. The active suspension can effectively suppress the vehicle body roll by adjusting the active forces of the left and right suspensions to generate an anti-roll torque. Compared with the passive suspension, the roll stability is greatly improved.
4.2. Genetic Sliding Mode DYC
To test the effect of the genetic sliding mode DYC in Section 3.2, the simulation tests were carried out on a high and low tire–road friction coefficient road and compared with the ordinary sliding mode DYC.
4.2.1. High Tire–Road Friction Coefficient Road
The vehicle drives at a constant speed of 80 km/h on a flat road with a tire–road friction coefficient of 0.9. The steering wheel input is shown in Figure 7a, the yaw’s stability performance is shown in Figure 7b,c, and the torque of each wheel is shown in Figure 7d–g, where a torque less than 0 means the braking toque.
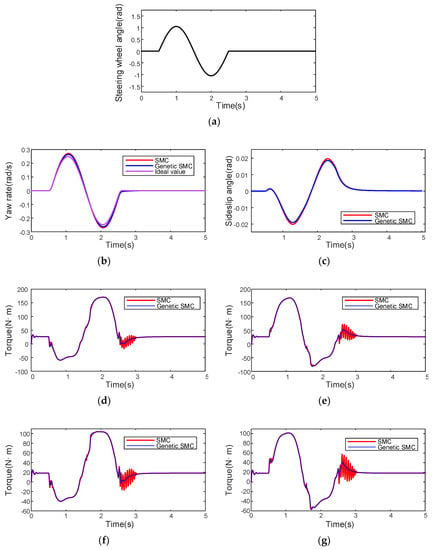
Figure 7.
DYC controller on high tire–road friction coefficient road. (a) steering wheel angle; (b) yaw rate; (c) sideslip angle; (d) front left driving torque; (e) front right driving torque; (f) rear left driving torque; and (g) rear right driving torque.
On the high tire–road friction coefficient road, both the genetic sliding mode DYC and the ordinary sliding mode DYC can track the ideal yaw rate well and maintain a small sideslip angle. In comparison, the genetic sliding mode DYC has a higher tracking accuracy, as shown in Figure 7b, and a smaller sideslip angle, as shown in Figure 7c, which means that the optimization works. In terms of the wheel torque in Figure 7d–g, the ordinary sliding mode DYC has an obvious chattering, while the genetic algorithm greatly suppresses the chattering.
4.2.2. Low Tire–Road Friction Coefficient Road
The tire–road friction coefficient is set to 0.3. Such a road condition is a more severe test for vehicles. Other simulation conditions are the same as those in Section 4.2.1. The simulation results are shown in Figure 8.
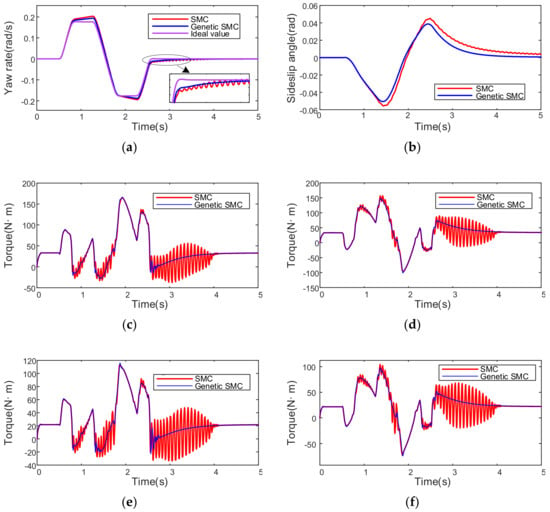
Figure 8.
DYC controller on low tire–road friction coefficient road. (a) yaw rate; (b) sideslip angle; (c) front left driving torque; (d) front right driving torque; (e) rear left driving torque; and (f) rear right driving torque.
As shown in Figure 8a,b, on a low tire–road friction coefficient road, there is chattering in both the yaw rate and sideslip angle when the ordinary sliding mode control is applied, which is unsafe and uncomfortable, and the deviation from the ideal value is large. However, the genetic sliding mode DYC almost eliminates the chattering in the yaw rate and sideslip angle, and the tracking accuracy is also improved. As shown in Figure 8c–f, the ordinary sliding mode control has an excessive chattering in the wheel torque which is impossible to be applied in practice. However, even on the low tire–road friction coefficient road, the genetic sliding mode control can still suppress the chattering effectively, which makes it more practical.
To sum up, the proposed genetic sliding mode DYC is able to maintain the yaw stability effectively, even on the low tire–road friction coefficient road. Chattering is common in the sliding mode control. Different from other studies, the genetic algorithm is introduced to compute the two parameters of the approaching law in the sliding mode control. The simulation results show that the tracking effects have been further improved. More importantly, the chattering caused by the sliding mode control is effectively suppressed.
4.3. Coordinated Controller
To test the effect of the proposed coordinated controller of active suspension and DYC, the stability performance under no control, independent control, and coordinated control are compared and analyzed under a ramp and sinusoidal steering maneuver. First, no control refers to the use of passive suspension in the vertical direction and no DYC control in the horizontal direction. Second, an independent control means that the active suspension and the DYC controller works independently where the anti-roll torque is evenly distributed between the front and rear axles. Finally, a coordinated control refers to the integrated control of the active suspension and DYC with the coordinated controller.
4.3.1. Simulation of Ramp Steering Maneuver
The vehicle drives at a constant speed of 80 km/h on a flat road with a tire–road friction coefficient of 0.9. The ramp steering wheel angel input is shown in Figure 9a. Additionally, the simulation results are shown in Figure 9. The wheel torque of the coordinated control is shown in Figure 9f where the values less than 0 refer to the braking torque.
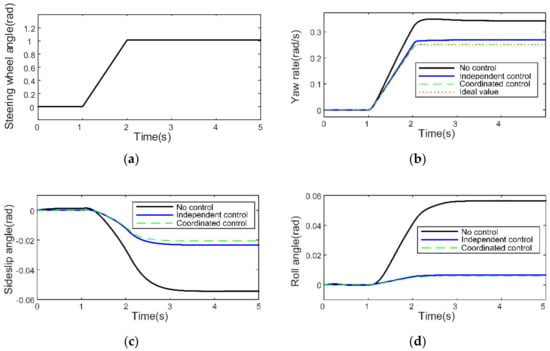
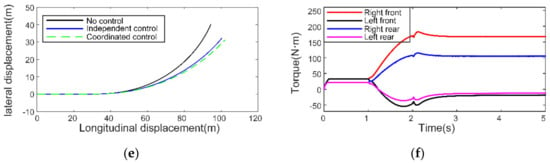
Figure 9.
Stability performance under ramp steering. (a) steering wheel angle; (b) yaw rate; (c) sideslip angle; (d) row angle; (e) vehicle trajectory; and (f) wheel torque.
For the yaw’s stability performance, in Figure 9b, when no control is taken, the yaw rate changes at a large speed and eventually remains at a value that is much larger than the ideal value. However, when controls are taken, the yaw rate can track the ideal value well. Among them, the coordinated control has a smaller deviation. In Figure 9c, the ideal sideslip angle is zero. When no control is taken, the sideslip angle increases fast and end with a large deviation. However, when controls are taken, the sideslip angle is much smaller. Among them, the coordinated control has a smaller sideslip angle which means a better yaw stability performance.
For the roll stability performance in Figure 9d, it is obvious that the vehicle roll angle without a control is too large, indicating a bad and dangerous driving experience. When controls are taken, the roll angle remains at a value that is almost zero. However, the roll angle of the coordinated control is slightly smaller, which means a better roll stability than the independent control.
For the vehicle trajectory in Figure 9e, the turning radius is too small under the condition of no control, while both independent and coordinated control can achieve the expected trajectory.
4.3.2. Simulation of Sinusoidal Steering Maneuver
The sinusoidal steering wheel angle input is shown in Figure 10a. The other simulation parameters are the same as those in Section 4.3.1. The simulation results are shown in Figure 10.
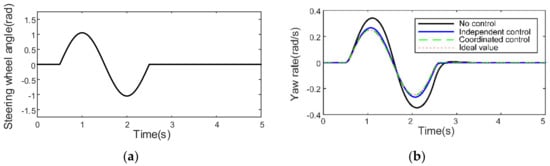
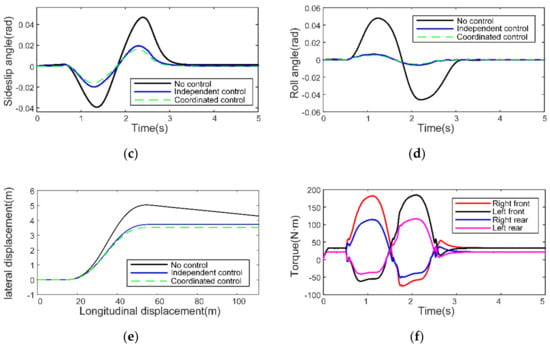
Figure 10.
Stability performance under sinusoidal steering. (a) steering wheel angle; (b) yaw rate; (c) sideslip angle; (d) row angle; (e) vehicle trajectory; and (f) wheel torque.
For the yaw’s stability performance in Figure 10b, the yaw rate is much larger than the ideal value through the whole process when no control is taken. This is quite dangerous, given that the vehicle might be out of control. The tracking accuracy is good under an independent control, while the coordinated control has an even better tracking accuracy which is nearly the same as the ideal yaw rate. In Figure 10c, the sideslip angle is large when no control is taken. However, when controls are taken, the sideslip angle is much smaller. As before, the coordinated control has a slightly smaller sideslip angle.
For the roll stability performance in Figure 10d, the roll angle under no control is apparently too large compared with taking control, which may lead to a dangerous rollover. Once the control is taken, the roll angle is effectively reduced. The roll angle of the coordinated control is slightly smaller.
For the driving trajectory in Figure 10e, the real trajectory under no control is far from the ideal one, which is so dangerous that it needs to be avoided. Meanwhile, both an independent and coordinated control can track the expected trajectory. Figure 10f shows the required wheel torque of each wheel.
To sum up, when the coordinated controller is introduced. The active suspension can play a role in the control of the yaw’s stability. The active suspension and DYC can work in coordination. The yaw rate tracking is great, and the sideslip angle and vehicle roll angle are small. The yaw and roll stability are further improved compared with simply using two independent controllers.
5. Conclusions
To improve the roll and yaw stability of a four-wheel independent drive electric vehicle, a genetic fuzzy PI control is used to design the active suspension roll controller. The genetic sliding mode control is used to design the DYC controller. With the two controllers, the roll and yaw stability are highly improved, and the chattering of the sliding mode control is effectively suppressed. To solve the coupling between the active suspension and DYC, a coordinated controller is proposed based on the adaptive distribution of an anti-roll torque in the front and rear suspension. The simulation results show that the proposed coordinated control has a better performance than simply using two independent controllers.
In a future work, the proposed model and controllers will be optimized and tested repeatedly, and real vehicle verification will be introduced. Additionally, estimators for the vehicle state and tire–road friction coefficient can be introduced. Economy can also be considered in addition to the driving comfort and stability to improve the comprehensive performance of the vehicle.
Author Contributions
Conceptualization, J.H.; data curation, F.X. and Z.L.; funding acquisition, J.H. and C.D.; investigation, F.X.; methodology, J.H. and Y.L.; project administration, J.H.; software, Y.L.; validation, Z.L.; visualization, Y.L.; writing—original draft, J.H., Y.L., and C.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Fundamental Research Funds for the Central Universities under Grant No. 2022CDJDX-004 and the National Key Research and Development Program of China under Grant No. 2018YFB0106100.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Katsuyama, E.; Yamakado, M.; Abe, M. A state-of-the-art review: Toward a novel vehicle dynamics control concept taking the driveline of electric vehicles into account as promising control actuators. Veh. Syst. Dyn. 2021, 59, 976–1025. [Google Scholar] [CrossRef]
- Han, S.Y.; Dong, J.F.; Zhou, J.; Chen, Y.H. Adaptive Fuzzy PID Control Strategy for Vehicle Active Suspension Based on Road Evaluation. Electronics 2022, 11, 921. [Google Scholar] [CrossRef]
- Kumar, S.; Medhavi, A.; Kumar, R.; Mall, P.K. Modeling and Analysis of Active Full Vehicle Suspension Model Optimized Using the Advanced Fuzzy Logic Controller. Int. J. Acoust. Vib. 2022, 27, 26–36. [Google Scholar] [CrossRef]
- Mrazgua, J.; Tisssir, E.H.; Ouahi, M. Fuzzy Fault-Tolerant H∞ Control Approach for Nonlinear Active Suspension Systems with Actuator Failure. Procedia Comput. Sci. 2019, 148, 465–474. [Google Scholar] [CrossRef]
- Pang, H.; Zhang, X.; Yang, J.J.; Shang, Y.T. Adaptive backstepping-based control design for uncertain nonlinear active suspension system with input delay. Int. J. Robust Nonlinear Control 2019, 29, 5781–5800. [Google Scholar] [CrossRef]
- Jin, X.J.; Wang, J.D.; Yan, Z.Y.; Xu, L.W.; Yin, G.D.; Chen, N. Robust Vibration Control for Active Suspension System of In-Wheel-Motor-Driven Electric Vehicle Via mu-Synthesis Methodology. J. Dyn. Syst. Meas. Control Trans. Asme 2022, 144, 051007. [Google Scholar] [CrossRef]
- Park, J.Y.; Na, S.; Cha, H.; Yi, K. Direct Yaw Moment Control with 4WD Torque-Vectoring for Vehicle Handling Stability and Agility. Int. J. Automot. Technol. 2022, 23, 555–565. [Google Scholar] [CrossRef]
- Wang, Z.; Montanaro, U.; Fallah, S.; Sorniotti, A.; Lenzo, B. A gain scheduled robust linear quadratic regulator for vehicle direct yaw moment Control. Mechatronics 2018, 51, 31–45. [Google Scholar] [CrossRef]
- Yin, D.J.; Wang, J.J.; Du, J.J.; Chen, G.; Hu, J.S. A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. Actuators 2021, 10, 122. [Google Scholar] [CrossRef]
- Zhang, H.Z.; Liang, J.S.; Jiang, H.B.; Cai, Y.F.; Xu, X. Stability Research of Distributed Drive Electric Vehicle by Adaptive Direct Yaw Moment Control. IEEE Access 2019, 7, 106225–106237. [Google Scholar] [CrossRef]
- Ahmadian, N.; Khosravi, A.; Sarhadi, P. Driver assistant yaw stability control via integration of AFS and DYC. Veh. Syst. Dyn. 2022, 60, 1742–1762. [Google Scholar] [CrossRef]
- Meng, Q.H.; Zhao, T.T.; Qian, C.J.; Sun, Z.Y.; Ge, P.P. Integrated stability control of AFS and DYC for electric vehicle based on non-smooth control. Int. J. Syst. Sci. 2018, 49, 1518–1528. [Google Scholar] [CrossRef]
- Lu, M.X.; Xu, Z.C. Integrated Handling and Stability Control with AFS and DYC for 4WID-EVs via Dual Sliding Mode Control. Autom. Control Comput. Sci. 2021, 55, 243–252. [Google Scholar] [CrossRef]
- Liang, J.H.; Lu, Y.B.; Yin, G.D.; Fang, Z.W.; Zhuang, W.C.; Ren, Y.J.; Xu, L.W.; Li, Y.J. A Distributed Integrated Control Architecture of AFS and DYC Based on MAS for Distributed Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 5565–5577. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Liu, C.Z.; Wu, X.H.; Fang, S.N.; Yong, J.W. Robust LMI-Based H-Infinite Controller Integrating AFS and DYC of Autonomous Vehicles With Parametric Uncertainties. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6901–6910. [Google Scholar] [CrossRef]
- Feng, T.; Wang, Y.P.; Li, Q. Coordinated control of active front steering and active disturbance rejection sliding mode-based DYC for 4WID-EV. Meas. Control 2020, 53, 1870–1882. [Google Scholar] [CrossRef]
- Liang, J.H.; Lu, Y.B.; Pi, D.W.; Yin, G.D.; Zhuang, W.C.; Wang, F.A.; Feng, J.W.; Zhou, C.B. A Decentralized Cooperative Control Framework for Active Steering and Active Suspension: Multi-Agent Approach. IEEE Trans. Transp. Electrif. 2022, 8, 1414–1429. [Google Scholar] [CrossRef]
- Hu, J.J.; Han, Y.; Chen, J. Integrated control of direct yaw moment control and active suspension system for 4wd vehicles. Mechanika 2017, 23, 412–424. [Google Scholar] [CrossRef][Green Version]
- Tan, B.H.; Zhang, B.J.; Zhang, N.; Chen, Y.C.; Qin, A. Integrated control of electronic stability program and active suspension system using a priority-weighting mechanism. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Men, Y.Z.; Yu, H.B.; Li, X.S.; Li, Y.W. Control Strategy of Vehicle Suspension Damping System Based on MATLAB. In Proceedings of the 2nd International Conference on Civil Engineering and Transportation (ICCET 2012), Guilin, China, 27–28 October 2012; pp. 2117–2120. [Google Scholar]
- Jia, F.J.; Jing, H.H.; Liu, Z.Y.; Gu, M.Q. Cooperative control of yaw and roll motion for in-wheel motor vehicle with semi-active suspension. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 3–15. [Google Scholar] [CrossRef]
- Cho, W.; Suh, J.; You, S.H. Integrated Motion Control Using a Semi-Active Damper System to Improve Yaw-Roll-Pitch Motion of a Vehicle. IEEE Access 2021, 9, 52464–52473. [Google Scholar] [CrossRef]
- Li, X.; Xu, X.Y.; Zhang, H.; Ma, M.Y. Mixed H-2/H-∞ Tracking Control for Rollover Prevention and Yaw Stability of Commercial Buses. In Proceedings of the 16th IEEE International Conference on Control and Automation (ICCA), Singapore, 9–11 October 2020; pp. 1193–1198. [Google Scholar]
- Zhao, J.; Wong, P.K.; Ma, X.B.; Xie, Z.C. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy. Veh. Syst. Dyn. 2017, 55, 72–103. [Google Scholar] [CrossRef]
- Zhao, W.Z.; Yang, Z.S.; Wang, C.Y. Multi-objective optimization of chassis integrated system for electric wheel vehicle. Proc. Inst. Mech. Eng. Part C J. Eng. Mech. Eng. Sci. 2019, 233, 7–17. [Google Scholar] [CrossRef]
- Yu, Z.S. Automotive Theory; China Machine Press: Beijing, China, 2009. [Google Scholar]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).