
Acoustic Roughness Measurement of Railway Tracks: Implementation of a Chord-Based Optical Measurement System on a Train

Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
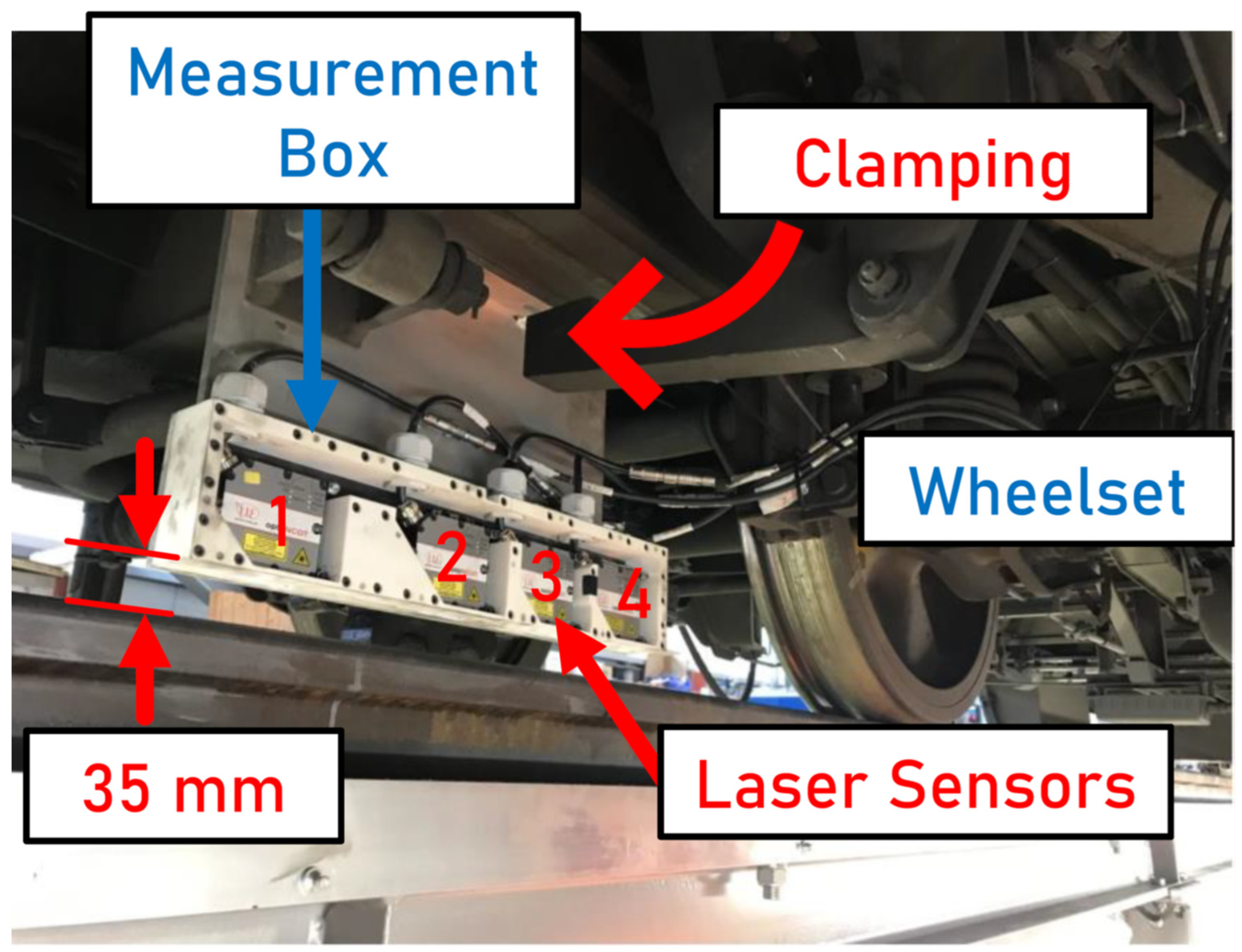
2.1. Setup
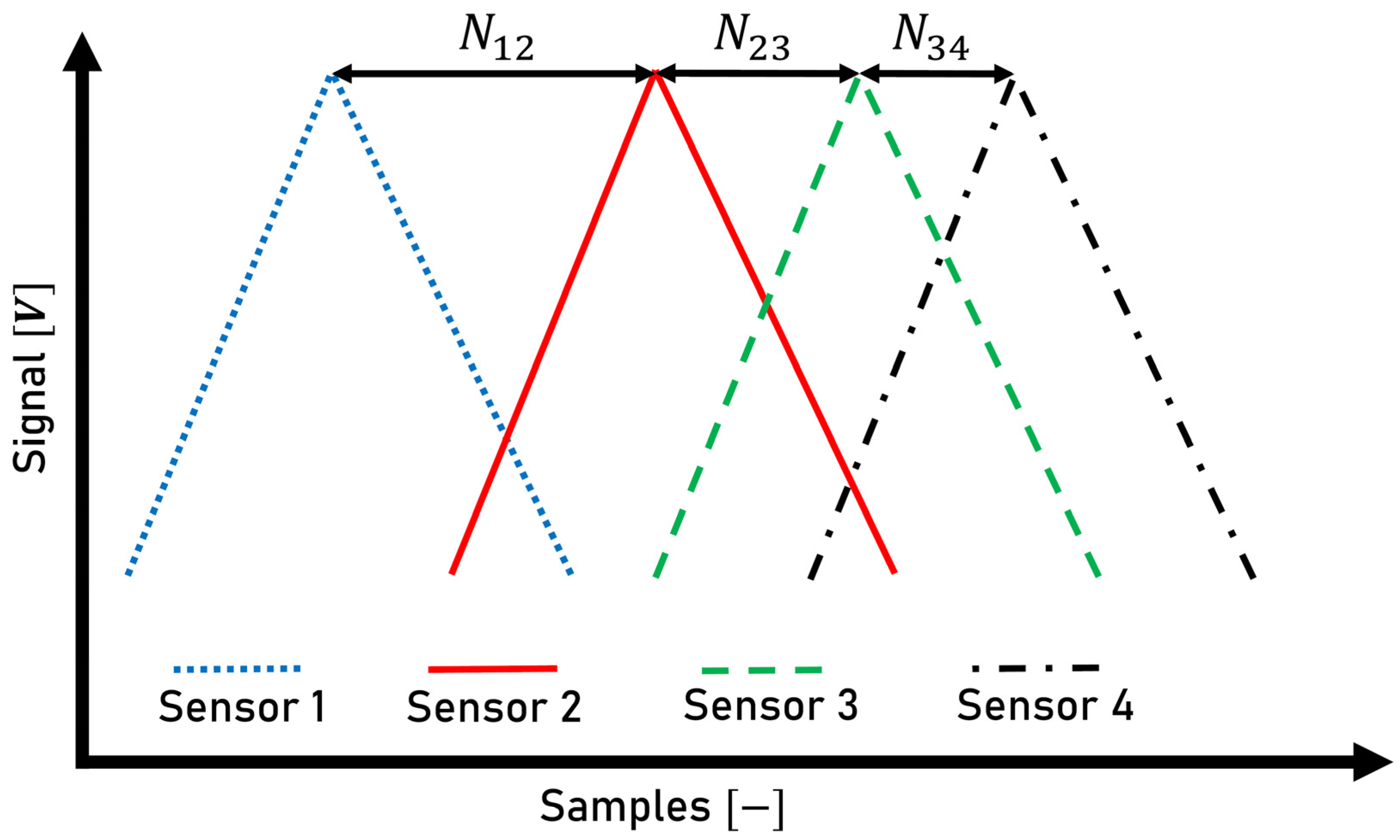
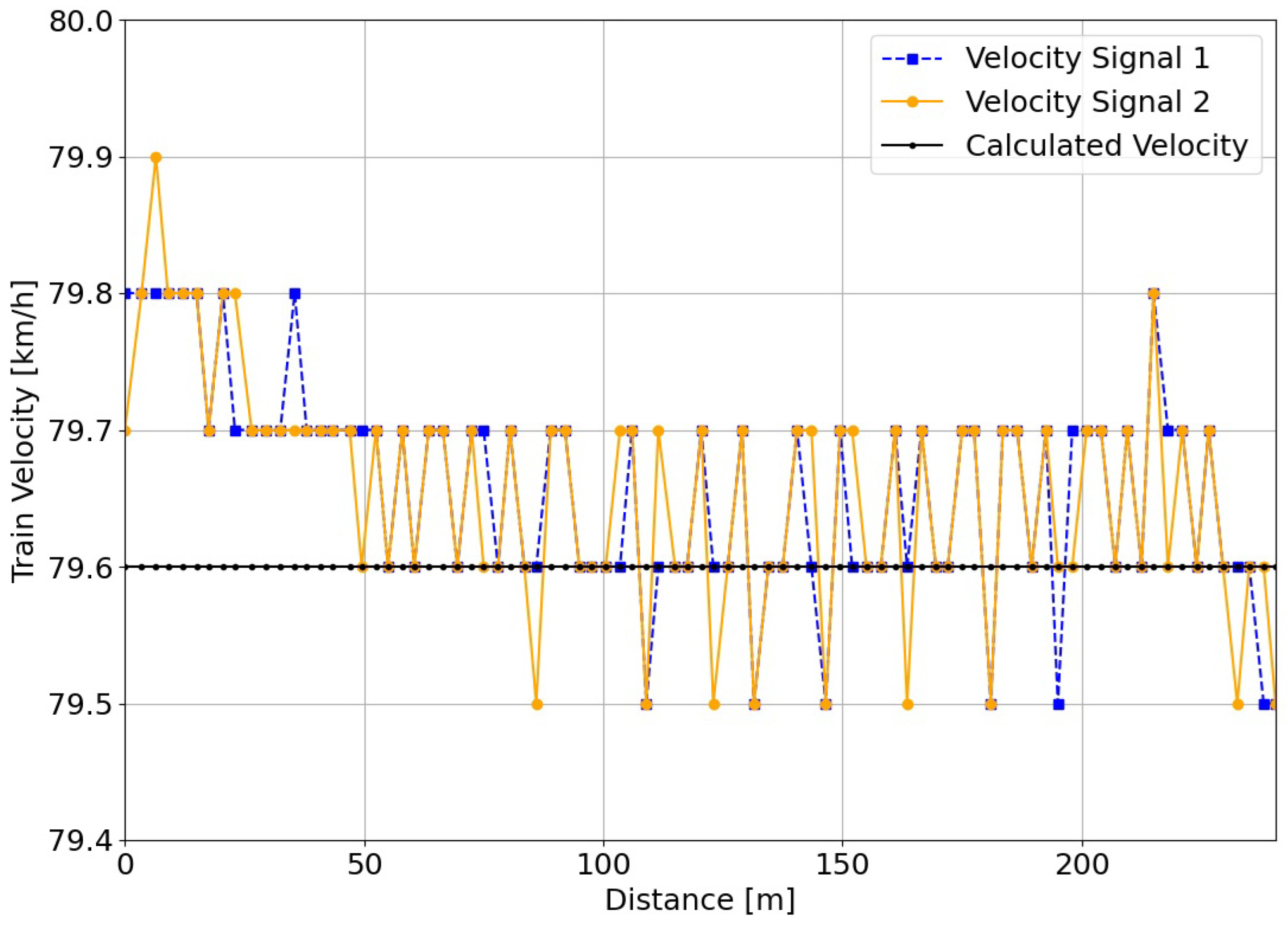
2.2. Velocity Calculation
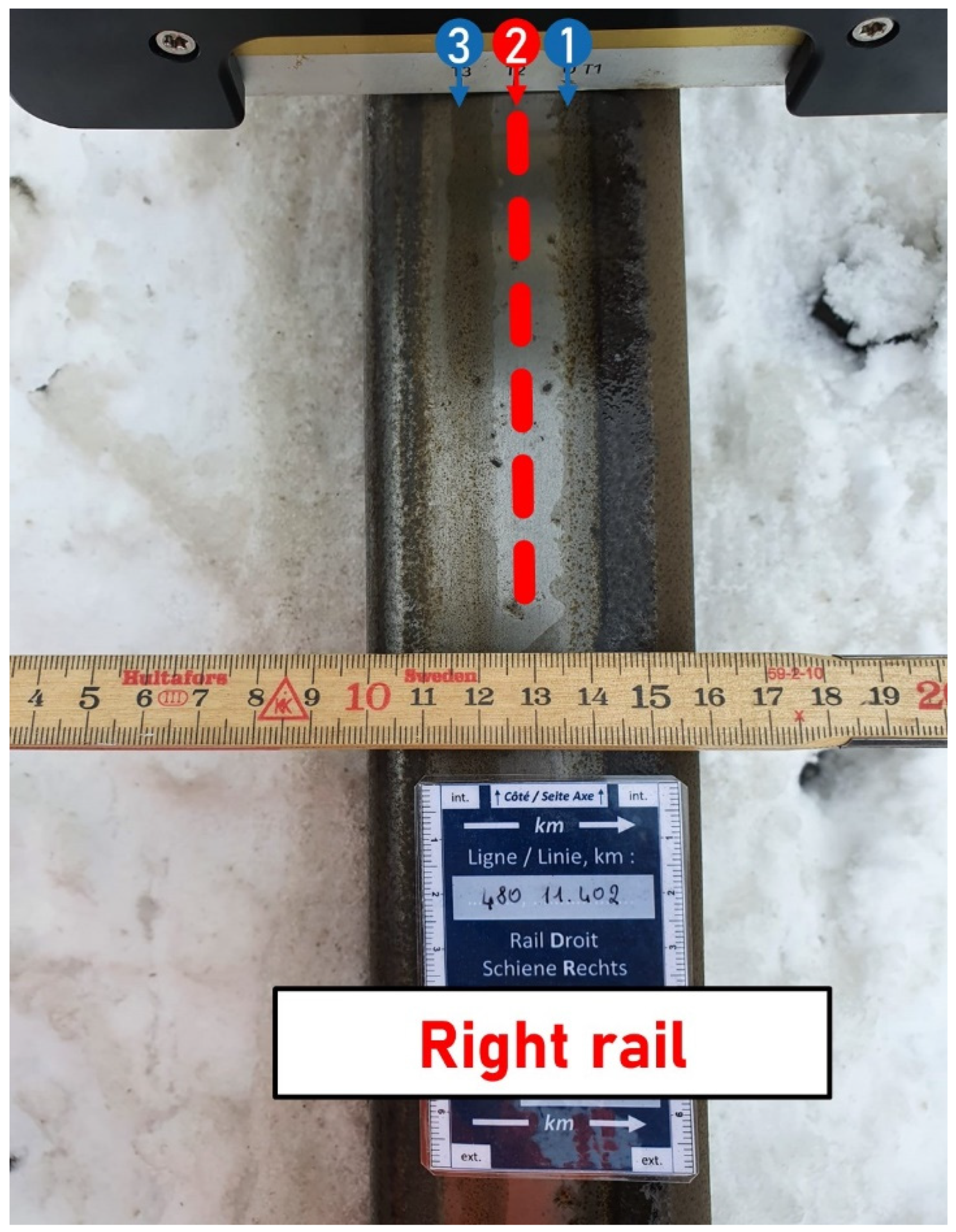
2.3. Reference Measurement
3. Results
3.1. Velocity Calculation
3.2. Reference Section Evaluation for SBB Measurement Data
3.3. Measurement with the Optical System in the Tunnel at
3.4. Measurement with the Optical System at
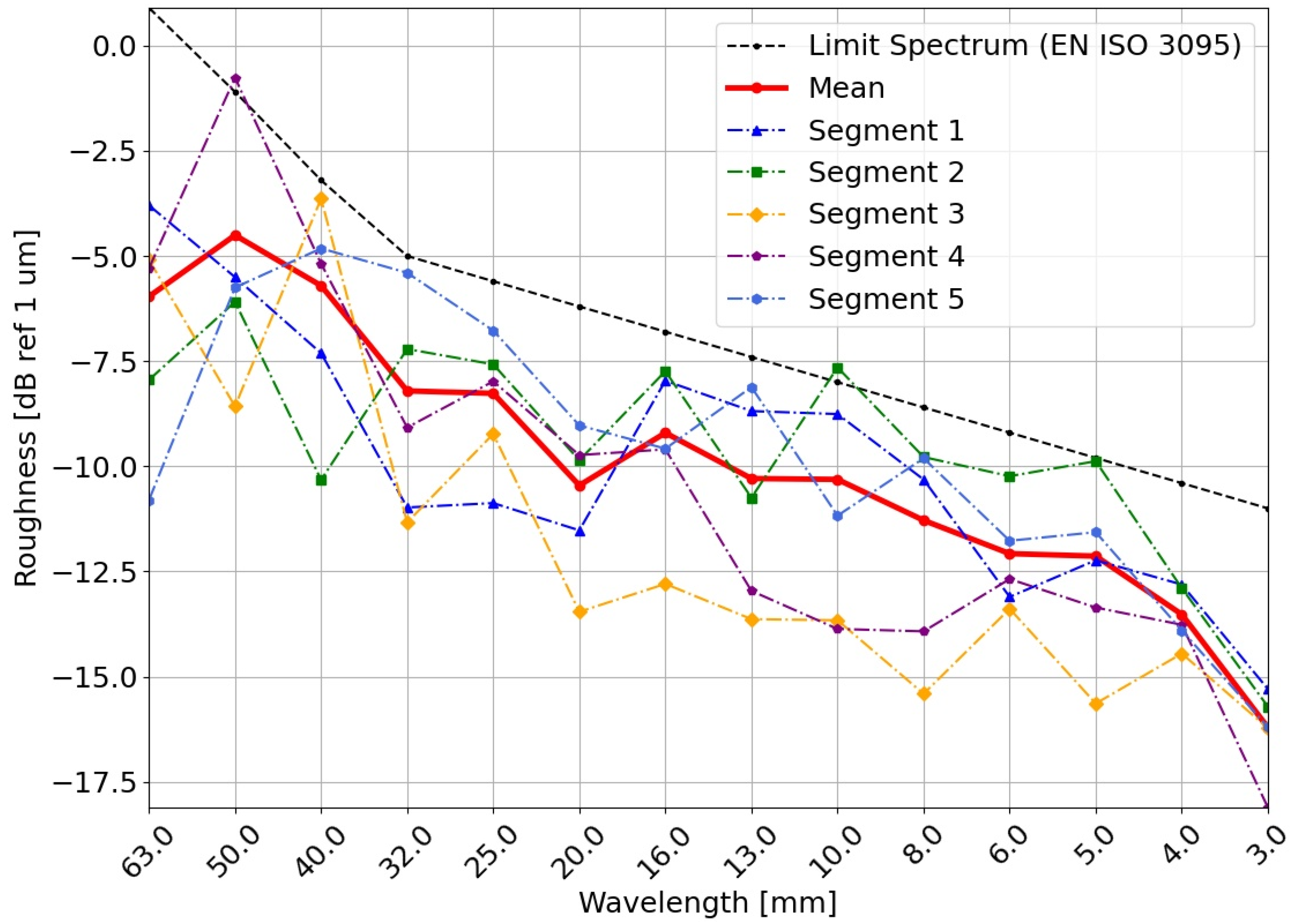
3.5. Measurement with the Optical System in the Reference Section
4. Discussion
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
References
- Magiera, A.; Solecka, J. Environmental noise, its types and effects on health. Rocz. Panstw. Zakl. Hig. 2021, 72, 41–48. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Ma, H. Investigation of Chinese residents’ community response to high-speed railway noise. Appl. Acoust. 2021, 172, 107615. [Google Scholar] [CrossRef]
- Fiorini, C.V. Railway noise in urban areas: Assessment and prediction on infrastructure improvement combined with settlement development and regeneration in central Italy. Appl. Acoust. 2022, 185, 108413. [Google Scholar] [CrossRef]
- Szwarc, M.; Kostek, B.; Kotus, J.; Szczodrak, M.; Czyżewski, A. Problems of Railway Noise-A Case Study. Int. J. Occup. Saf. Ergon. 2011, 17, 309–325. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polak, K.; Korzeb, J. Identification of the major noise energy sources in rail vehicles moving at a speed of 200 km/h. Energies 2021, 14, 3957. [Google Scholar] [CrossRef]
- Thompson, D.J. On the Relationship between Wheel and Rail Surface Roughness and Rolling Noise. J. Sound Vib. 1996, 193, 149–160. [Google Scholar] [CrossRef]
- Kuffa, M.; Ziegler, D.; Peter, T.; Kuster, F.; Wegener, K. A new grinding strategy to improve the acoustic properties of railway tracks. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 214–221. [Google Scholar] [CrossRef]
- Tufano, A.R.; Chiello, O.; Pallas, M.A.; Faure, B.; Chaufour, C.; Reynaud, E.; Vincent, N. On-Board Indirect Measurements of the Acoustic Quality of Railway Track: State-Of-The Art and Simulations. INTER-NOISE 2019 MADRID—48th International Congress Exhibition Noise Control Engineering, 2019. Available online: https://www.ingentaconnect.com/content/ince/incecp/2019/00000259/00000005/art00003 (accessed on 19 October 2022).
- Grassie, S.L.; Saxon, M.J.; Smith, J.D. Measurement of longitudinal rail irregularities and criteria for acceptable grinding. J. Sound Vib. 1999, 227, 949–964. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, H.; Shimizu, A.; Sano, K. Development and verification of monitoring tools for realizing effective maintenance of rail corrugation. IET Conf. Publ. 2014, 2014, 14737938. [Google Scholar] [CrossRef]
- Jeong, D.; Choi, H.S.; Choi, Y.J.; Jeong, W. Measuring acoustic roughness of a longitudinal railhead profile using a multi-sensor integration technique. Sensors 2019, 19, 1610. [Google Scholar] [CrossRef]
- Lewis, R.B. Track-recording techniques used on British Rail. IEE Proc. B Electr. Power Appl. 1984, 131, 73–81. [Google Scholar] [CrossRef]
- Bocciolone, M.; Caprioli, A.; Cigada, A.; Collina, A. A measurement system for quick rail inspection and effective track maintenance strategy. Mech. Syst. Signal Process. 2007, 21, 1242–1254. [Google Scholar] [CrossRef]
- Carrigan, T.D.; Talbot, J.P. Extracting Information from Axle-Box Acceleration: On the Derivation of Rail Roughness Spectra in the Presence of Wheel Roughness. Notes Numer. Fluid Mech. Multidiscip. Des. 2021, 150, 286–294. [Google Scholar] [CrossRef]
- Hauck, G.; Onnich, H.; Prögler, H. Entwicklung eines Messwagens zur Erfassung der Fahrgeräuschanhebungen durch Schienenriffeln. ETR Eisenb. Rundsch. 1997, 46, 153–159. [Google Scholar]
- Kuijpers, A.H.W.M.; Schwanen, W.; Bongini, E. Indirect Rail Roughness Measurement: The ARRoW System within the LECAV Project. Notes Numer. Fluid Mech. Multidiscip. Des. 2012, 118, 563–570. [Google Scholar] [CrossRef]
- Squicciarini, G.; Thompson, D.J.; Toward, M.G.R.; Cottrell, R.A. The effect of temperature on railway rolling noise. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2015, 230, 1777–1789. [Google Scholar] [CrossRef] [Green Version]
- Mauz, F.; Wigger, R.; Wahl, T.; Kuffa, M.; Wegener, K. Acoustic Roughness Measurement of Railway Tracks: Laboratory Investigation of External Disturbances on the Chord-Method with an Optical Measurement Approach. Appl. Sci. 2022, 12, 7732. [Google Scholar] [CrossRef]
- Grassie, S.L. Measurement of railhead longitudinal profiles: A comparison of different techniques. WEAR Int. J. Sci. Technol. Frict. Lubr. Wear 1996, 191, 245–251. [Google Scholar] [CrossRef]
- DIN EN 15610; Bahnanwendungen. Akustik. Messung der Schienen- und Radrauheit im Hinblick auf Die Entstehung von Rollgeräuschen. Deutsche Fassung. EN 15610:2019; Beuth Verlag: Berlin, Germany, 2021.
- Mauz, F.; Wigger, R.; Wahl, T.; Kuffa, M.; Wegener, K. Acoustic roughness measurement of railway tracks: Implementation of an optical measurement approach & possible improvements to the standard. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 2022, 1210–1217. [Google Scholar] [CrossRef]
- DIN EN ISO 3095; Akustik—Bahnanwendungen—Messung der Geräuschemission von Spurgebundenen Fahrzeugen (ISO 3095). Beuth Verlag: Berlin, Germany, 2013. [CrossRef]
- Schimmel, M. Phase cross-correlations: Design, comparisons, and applications. Bull. Seismol. Soc. Am. 1999, 89, 1366–1378. [Google Scholar] [CrossRef]
- Zhou, L.; Ding, L.; Yi, X. A review of snow melting and de-icing technologies for trains. Impact Factor 2022, 2022, 095440972110596. [Google Scholar] [CrossRef]
- Liu, X.; Thompson, D.; Squicciarini, G.; Rissmann, M.; Bouvet, P.; Xie, G.; Martínez-Casas, J.; Carballeira, J.; Arteaga, I.L.; Garralaga, M.A.; et al. Measurements and modelling of dynamic stiffness of a railway vehicle primary suspension element and its use in a structure-borne noise transmission model. Appl. Acoust. 2021, 182, 108232. [Google Scholar] [CrossRef]
- Knothe, K.; Stichel, S. Introduction to Lateral Dynamics of Railway Vehicles. In Rail Vehicle Dynamics; Springer International Publishing: Cham, Switzerland, 2017; pp. 159–168. ISBN 978-3-319-45376-7. [Google Scholar]
- Carrigan, T.D.; Fidler, P.R.A.; Talbot, J.P. On the Derivation of Rail Roughness Spectra from Axle-box Vibration: Development of a New Technique. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; ICE Publishing: Cambridge, UK, 2019; Volume 2019, pp. 549–557. [Google Scholar]
- Chen, L.; Li, Y.; Zhong, X.; Zheng, Q.; Liu, H. An Automated System for Position Monitoring and Correction of Chord-Based Rail Corrugation Measuring Points. IEEE Trans. Instrum. Meas. 2019, 68, 250–260. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kilometer | Location |
|---|---|
| 2.69 | Stansstad (Start) |
| 11.28 | Reference Section A |
| 11.40 | Reference Section B |
| 18.60 | Start Toothed Rack (Tunnel) |
| 21.73 | End Toothed Rack (Tunnel) |
| 24.78 | Engelberg (End) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mauz, F.; Wigger, R.; Wahl, T.; Kuffa, M.; Wegener, K. Acoustic Roughness Measurement of Railway Tracks: Implementation of a Chord-Based Optical Measurement System on a Train. Appl. Sci. 2022, 12, 11988. https://doi.org/10.3390/app122311988
Mauz F, Wigger R, Wahl T, Kuffa M, Wegener K. Acoustic Roughness Measurement of Railway Tracks: Implementation of a Chord-Based Optical Measurement System on a Train. Applied Sciences. 2022; 12(23):11988. https://doi.org/10.3390/app122311988
Chicago/Turabian StyleMauz, Florian, Remo Wigger, Tobias Wahl, Michal Kuffa, and Konrad Wegener. 2022. "Acoustic Roughness Measurement of Railway Tracks: Implementation of a Chord-Based Optical Measurement System on a Train" Applied Sciences 12, no. 23: 11988. https://doi.org/10.3390/app122311988