
A Feasibility Study of the Use of PZT Actuators for Active Control to Enrich Engine Sound
Abstract
:1. Introduction
2. Active Sound Enrichment Using PZT Actuators
2.1. Sound Radiation by a PZT-Plate Actuator
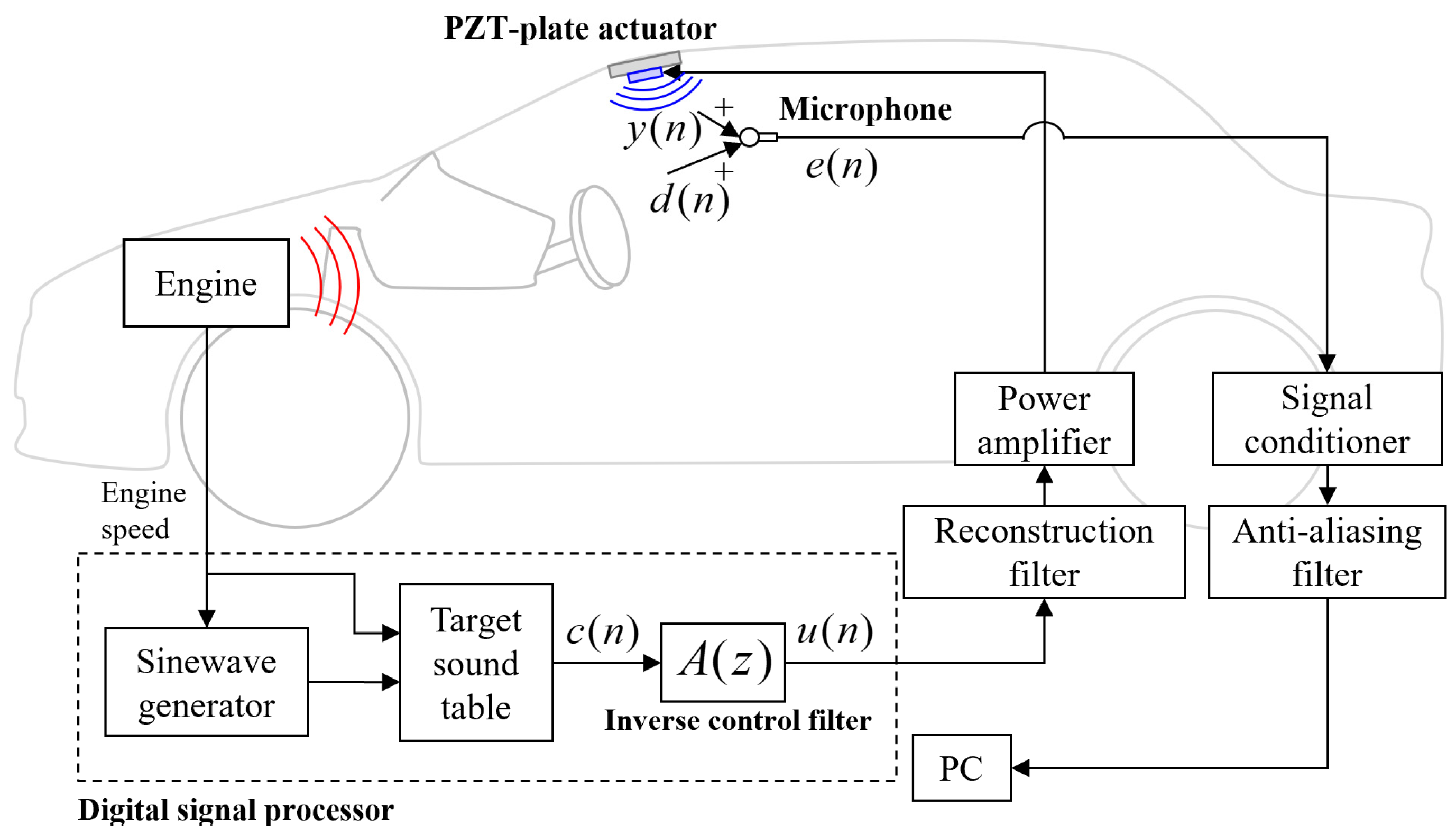
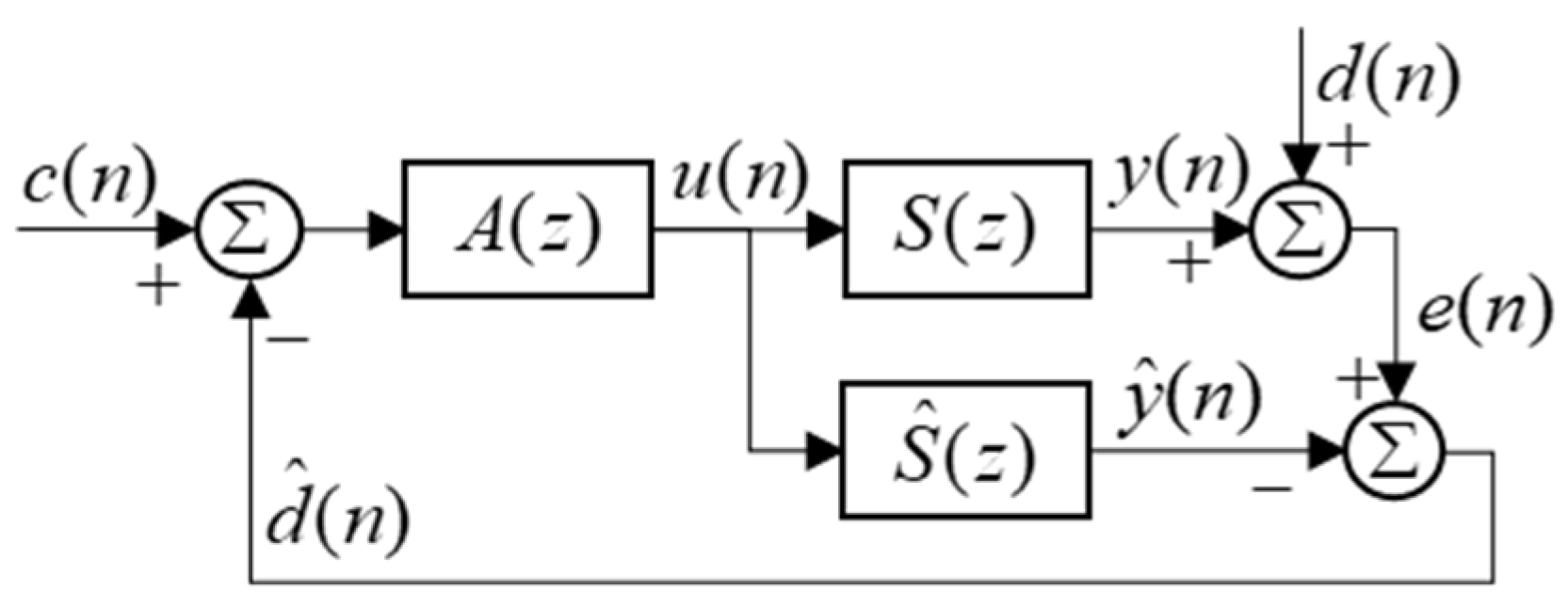
2.2. Novel ASE System Using a PZT-Plate Actuator and ASE Algorithm
3. Experimental Set-Up
3.1. Implementation of the Proposed ASE System
3.2. Implementation of the PZT-Plate Actuator for Sound Radiation
4. Experiment Results and Discussions
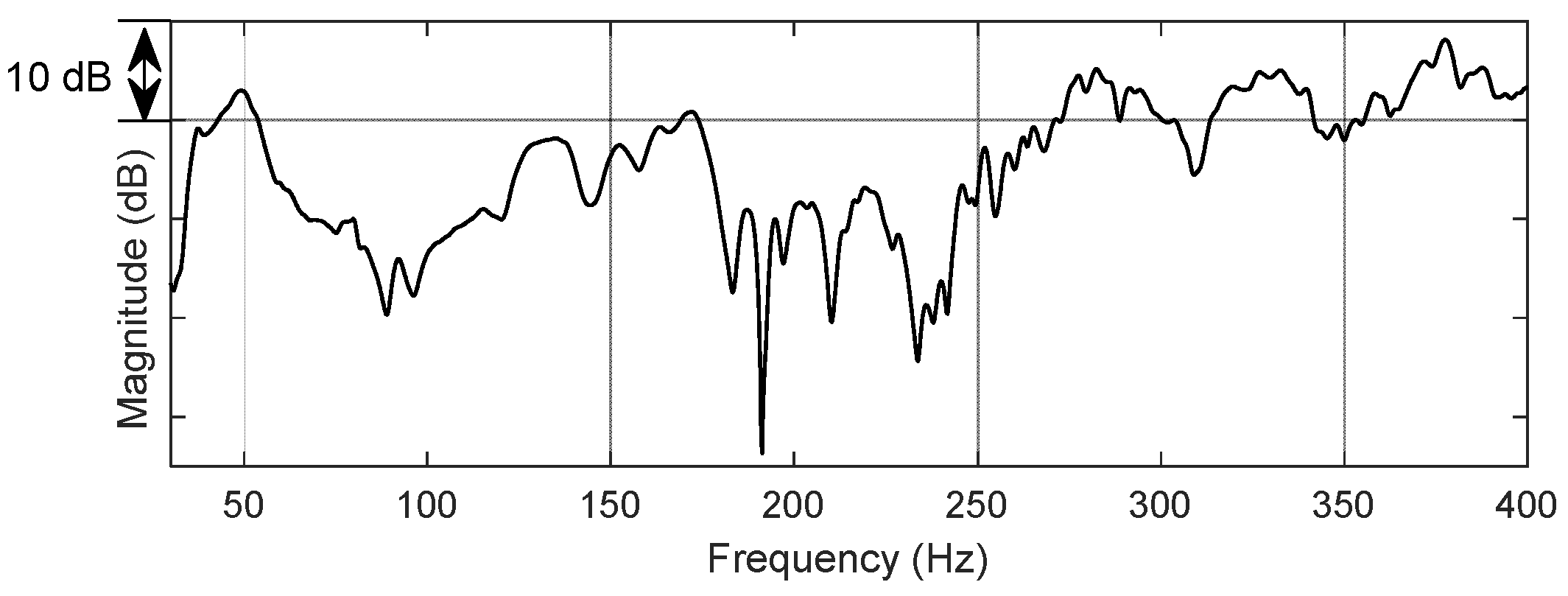
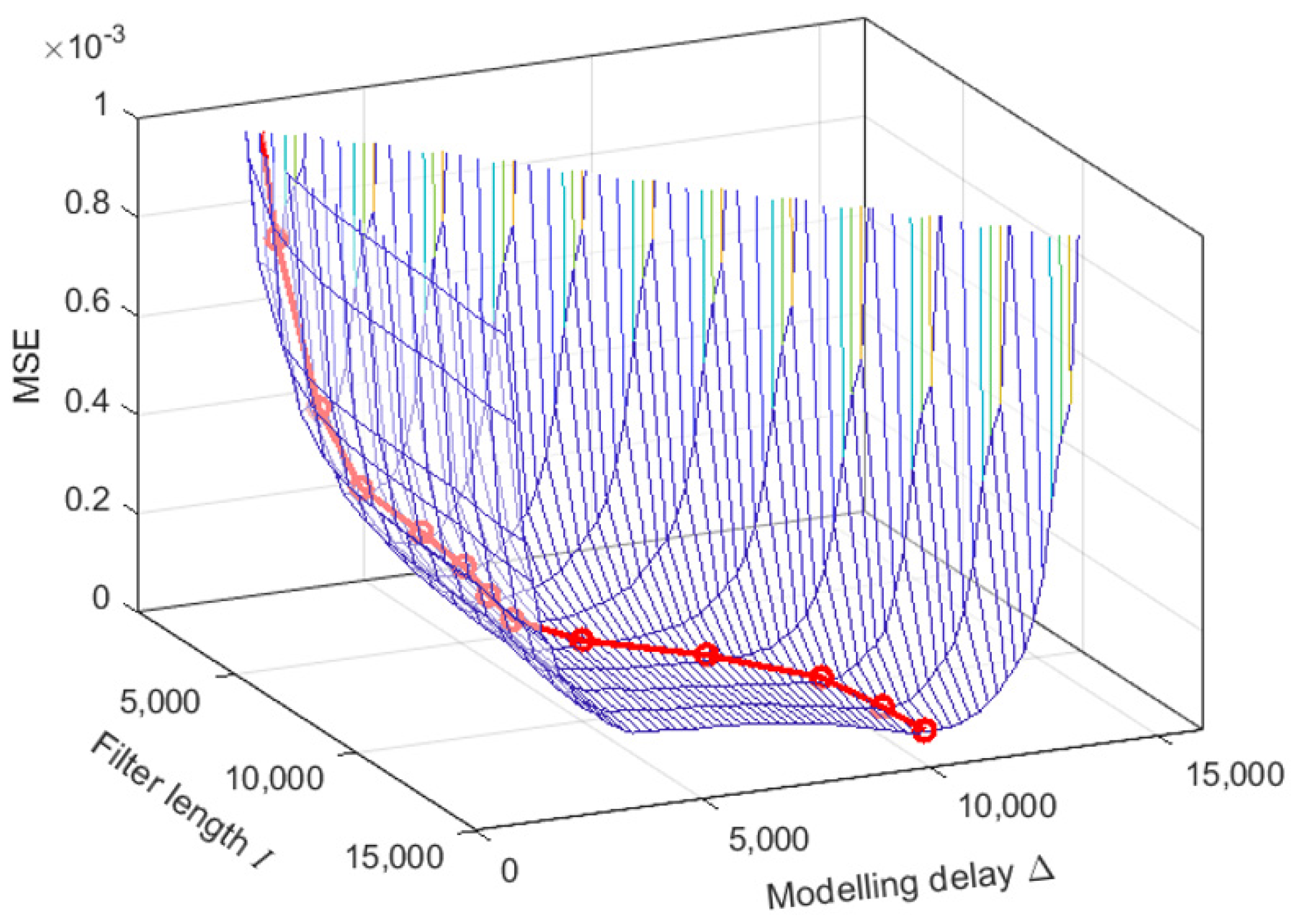
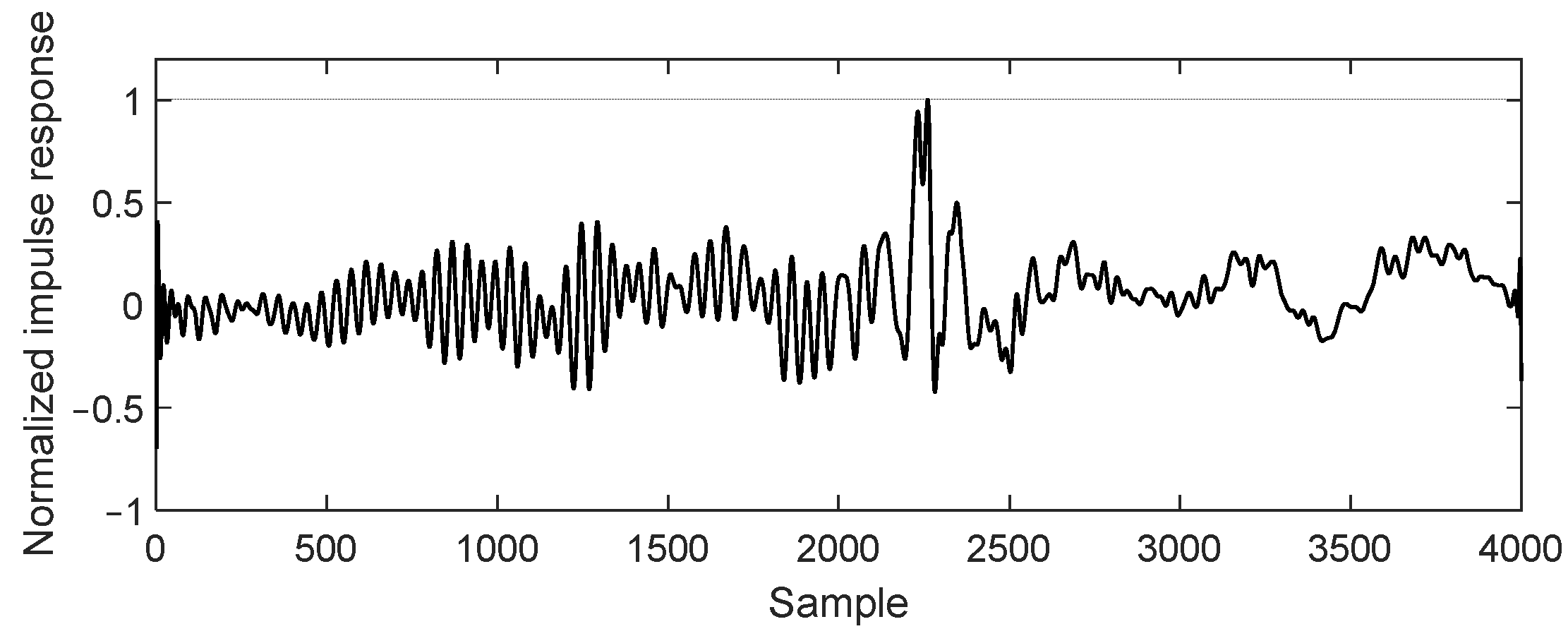
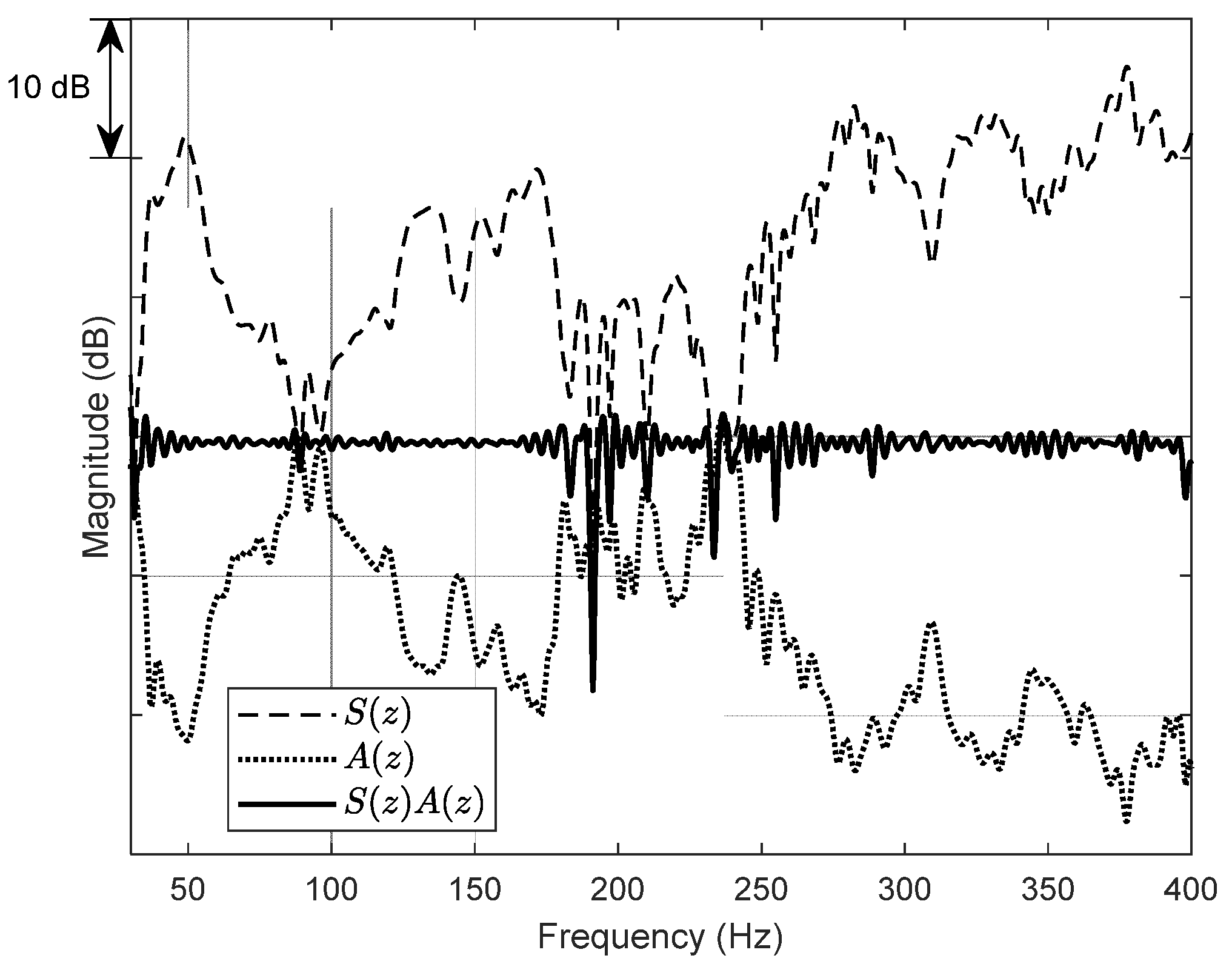
4.1. Properties of the Secondary Path
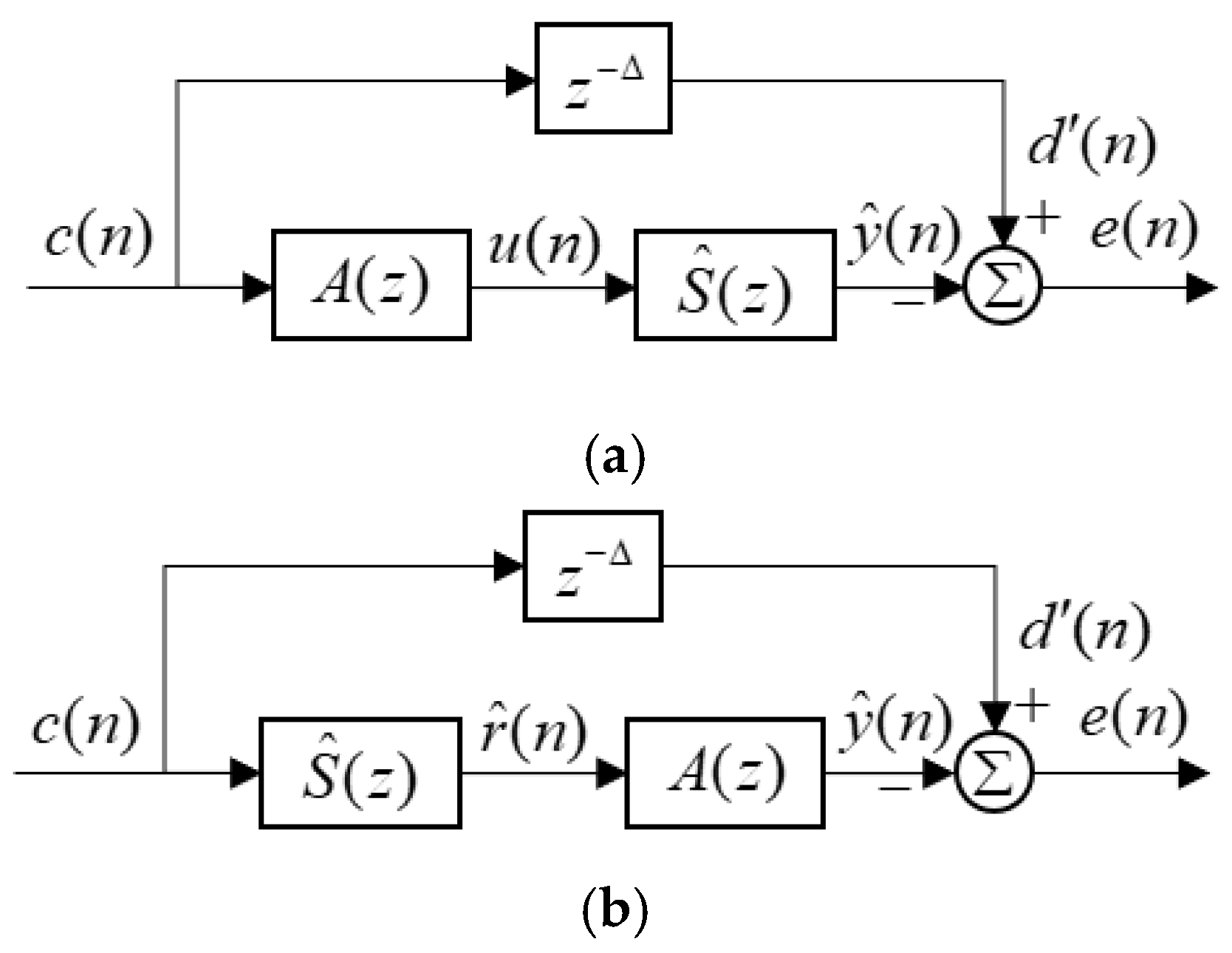
4.2. Implementation of A(z) of the Proposed ASE Algorithm
4.3. Spectrogram Analysis after ASE
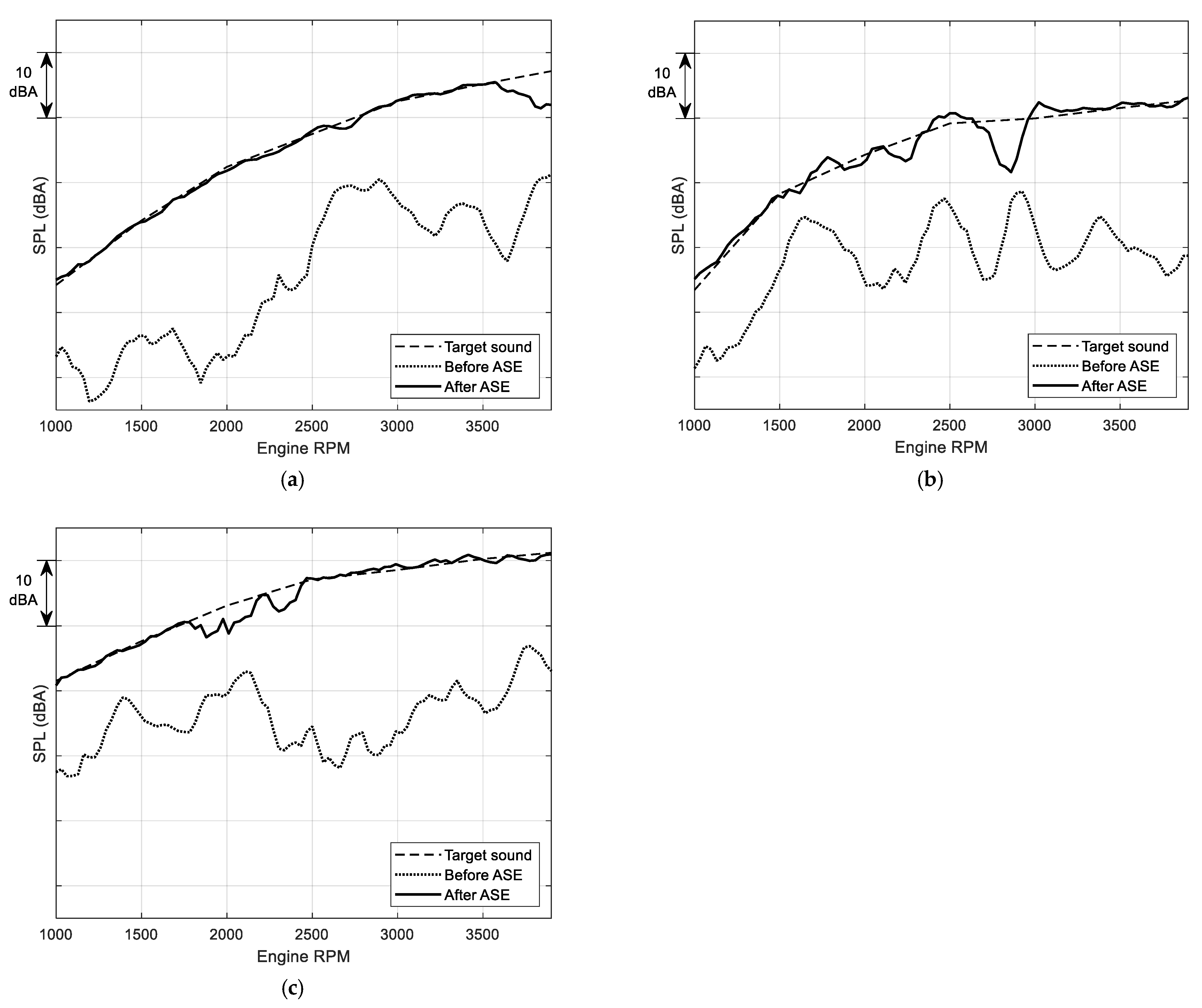
4.4. Performance Analysis after ASE
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fuller, C.R.; Elliott, S.J.; Nelson, P.A. Active Control of Vibration; Academic Press: London, UK, 1996. [Google Scholar]
- Lee, Y.-S. Active Control of Smart Structures Using Distributed Piezoelectric Transducers. Ph.D. Thesis, University of Southampton, Southampton, UK, 2000. [Google Scholar]
- Lee, Y.-S.; Gardonio, P.; Elliott, S.J. Volume velocity vibration control of a smart panel using a uniform force actuator and an accelerometer array. Smart Mater. Struct. 2002, 11, 863–873. [Google Scholar] [CrossRef]
- Schirmacher, R. Active design of automotive engine sound. In Proceedings of the Audio Engineering Society Convention, München, Germany, 10–13 May 2002; p. 112. [Google Scholar]
- Moon, S.; Park, S.; Park, D.; Yun, M.; Chang, K.; Park, D. Active sound design development based on the harmonics of main order form engine sound. J. Audio Eng. Soc. 2020, 68, 532–544. [Google Scholar] [CrossRef]
- Park, D.C.; Jo, E.S.; Hong, S.; Ksakan, M. Development of personalized engine sound system using active sound design technology. SAE Int. J. Passeng. Cars-Mech. Syst. 2015, 8, 862–867. [Google Scholar] [CrossRef]
- Kim, S.; Lee, S.M.; Park, D.C.; Chang, K.J.; Lee, S.K. A Systematic approach to engine sound design for enhancing sound character by active sound design. ASE Int. J. Passeng. Cars-Mech. Syst. 2017, 10, 691–702. [Google Scholar] [CrossRef]
- Bodden, M.; Belschner, T. Comprehensive automotive active sound design-Part 1: Electric and combustion vehicles. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference, Daejeon, Republic of Korea, 16–19 November 2014; Volume 249, pp. 3214–3219. [Google Scholar]
- Pruetz, J.E.; Eisele, G.; Govindswamy, K.; Steffens, C. Active Sound Design Methodologies for Hybrid and Electric Vehicles; SAE Technical Paper 2021; No. 2021-01-1019; SAE: Warrendale, PA, USA, 2021. [Google Scholar] [CrossRef]
- Gwak, D.Y.; Yoon, K.; Seong, Y.; Lee, S. Application of subharmonics for active sound design of electric vehicles. J. Acoust. Soc. Am. 2014, 136, EL391–EL397. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Hou, H.; Liu, Y.; Tang, L.; Li, Y. Engine order sound simulation by active sound generation for electric vehicles. SAE Int. J. Veh. Dyn. Stab. NVH 2020, 4, 151–164. [Google Scholar] [CrossRef]
- Elliott, S.J.; Stothers, I.M.; Nelson, P.A.; McDonald, A.M.; Quinn, D.C.; Saunders, T. The active control of engine noise inside cars. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference, Christchurch, New Zealand, 16–18 November 1998; pp. 987–990. [Google Scholar]
- Couche, J.; Fuller, C. Active control of power train and road noise in the cabin and a sports utility vehicle with advanced speakers. In Proceedings of the 1999 International Symposium on Active Control of Sound and Vibration, Fort Lauderdale, FL, USA, 2–4 December 1999; pp. 2–4. [Google Scholar]
- Lee, Y.-S.; Ryu, S.; Yoo, E.; Lim, C. A feasibility study of an ESG to suppress road noise of a Car. Appl. Sci. 2022, 12, 2697. [Google Scholar] [CrossRef]
- Christian, C.; Benbara, N.; Rebillant, M.; Mechbal, N. Piezoelectric transducer for low frequency sound generation on surface loudspeakers. In Proceedings of the IX ECCOMAS Thematic Conference on Smart Structures and Materials, Paris, France, 8–11 July 2019; pp. 1–10. [Google Scholar]
- Simonich, J.; Partick, W.; Bolleman, B. Characterization of SpeakerTpae-a new thin film actuator for active noise control. In Proceedings of the 4th AIAA/CEAS Aeroacoustics Conference, Toulouse, France, 2–4 June 1998; p. 2352. [Google Scholar]
- Fahy, F.; Gardonio, P. Sound and Structural Vibration, 2nd ed.; Academic Press: London, UK, 2007. [Google Scholar]
- Warnaka, G.E.; Warnaka, M.E.; Parrella, M.J. Vehicular Loudspeaker System. U.S. Patent No. 6,356,641 B1, 12 March 2002. [Google Scholar]
- Zenker, B.; Dannemannm, M.; Geller, S.; Holeczek, K.; Weissenborn, O.; Altinsoy, M.E.; Modler, N. Structure-integrated loudspeaker using fiber-reinforced plastics and piezoelectric transducers—Design, manufacturing and validation. Appl. Sci. 2020, 10, 3438. [Google Scholar] [CrossRef]
- Widrow, B.; Walach, E. Adaptive Inverse Control; Prentice-Hall International Ed.: Hoboken, NJ, USA, 1996. [Google Scholar]
- Elliott, S.J. Signal Processing for Active Control; Academic Press: London, UK, 2001. [Google Scholar]
- Ryu, S.; Lim, J.; Lee, Y.-S.; Yoo, E.; Lim, C. Enhancing engine order sound using additive feedforward control for a secondary path with uncertainty at higher frequencies. Appl. Sci. 2022, 12, 4486. [Google Scholar] [CrossRef]
- Rees, L.E.; Elliott, S.J. Adaptive algorithms for active sound-profiling. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 711–719. [Google Scholar] [CrossRef]
- Fuji Ceramics, Product Catalog, Fuji Ceramics. Available online: https://www.fujicera.co.jp/download/ (accessed on 13 November 2022).
- Ryu, S.; Kim, J.; Lee, Y.-S. Active sound profiling of narrowband signals for improving sound quality in an enclosed space. Multimed. Tools Appl. 2017, 76, 24595–24607. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Elliott, S.J. Active position control of a flexible smart beam using internal model control. J. Sound Vib. 2001, 242, 767–791. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (dBA) | |||
|---|---|---|---|
| Engine order | C3 | C5 | C6 |
| Before ASE | 20.0 | 17.4 | 19.1 |
| After ASE | 0.9 | 1.5 | 1.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.-S.; Ryu, S.; Lim, J.; Yoo, E. A Feasibility Study of the Use of PZT Actuators for Active Control to Enrich Engine Sound. Appl. Sci. 2022, 12, 12017. https://doi.org/10.3390/app122312017
Lee Y-S, Ryu S, Lim J, Yoo E. A Feasibility Study of the Use of PZT Actuators for Active Control to Enrich Engine Sound. Applied Sciences. 2022; 12(23):12017. https://doi.org/10.3390/app122312017
Chicago/Turabian StyleLee, Young-Sup, Seokhoon Ryu, Jihea Lim, and Eunsuk Yoo. 2022. "A Feasibility Study of the Use of PZT Actuators for Active Control to Enrich Engine Sound" Applied Sciences 12, no. 23: 12017. https://doi.org/10.3390/app122312017