
Fuzzy Neural Network Dynamic Inverse Control Strategy for Quadrotor UAV Based on Atmospheric Turbulence


Abstract
1. Introduction
2. Establishment of the Atmospheric Wind Field Model
- Turbulent flow is smooth and uniform, and statistical characteristics do not change with position and time. In research, it is usually regarded as a continuous random spectrum function superimposed on the wind speed;
- The turbulent velocity follows a standard normal distribution.
2.1. Spectrum Function
2.2. Shaping Filter
- U-direction shaping filter
- V-direction shaping filter
- W-direction shaping filter
2.3. Generate Atmospheric Turbulence Sequence
3. Dynamic Model
- The center of mass of UAV is the origin of the body coordinate system;
- The system structure is strictly symmetrical rigid body bullet;
- Ignoring the effect of the surface curvature on the UAV bullet.
3.1. Nonlinear Dynamic Model of Quadrotor UAV
3.2. Dynamic Model under Disturbance of Wind Field
4. Control System Design
4.1. Model Inverse Error
4.2. Fuzzy Neural Network Controller Design
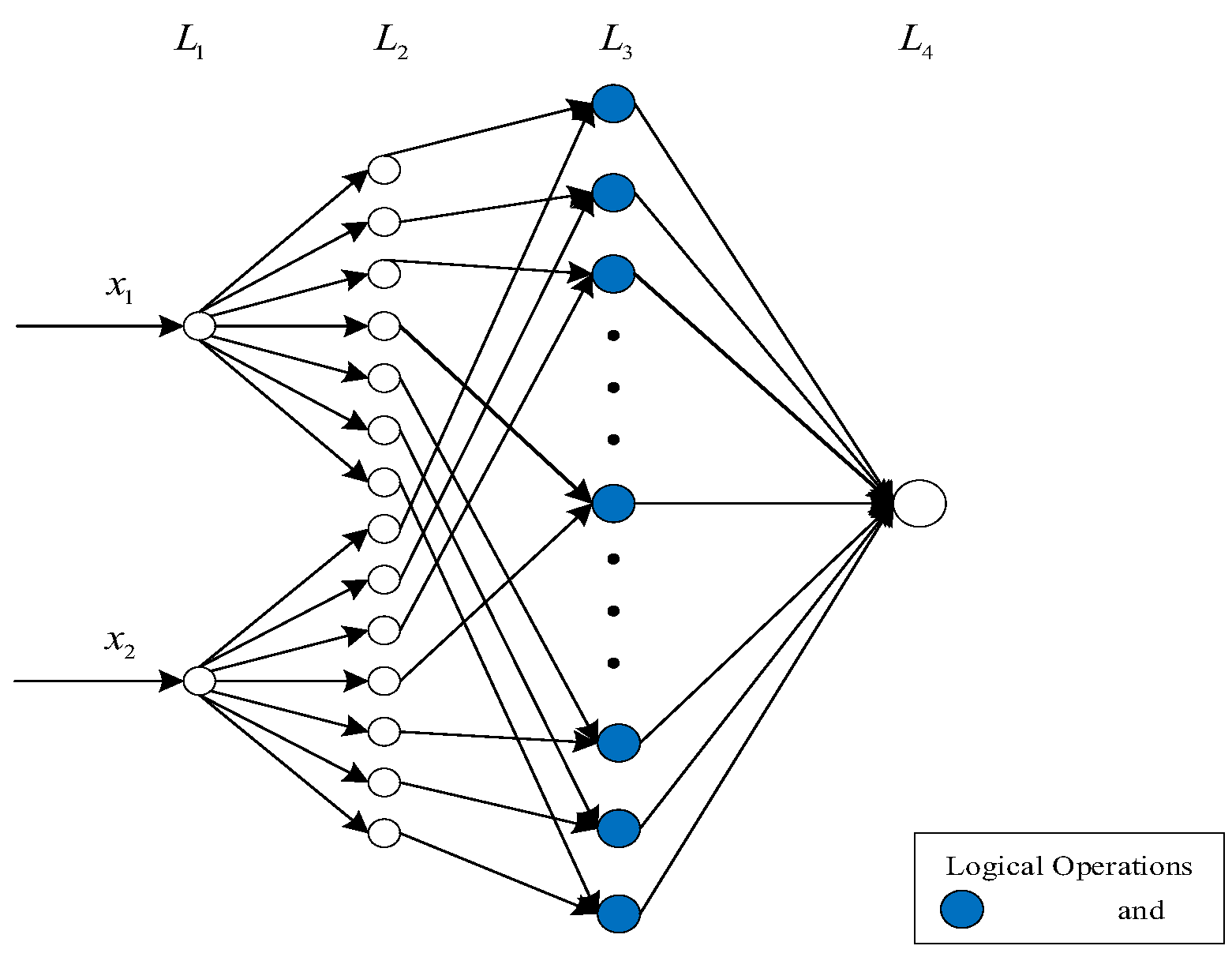
4.2.1. Controller Structure
- L1: The fuzzy neural network structure has two inputs, which are the error of the state variable in the attitude system and the error rate of change . Therefore, the number of neurons in this layer is . At the same time, the input volume is transferred to the next layer. The input and output of this layer can be expressed as
- L2: Fuzzy the variables transmitted by the above formula. Give the same fuzzy subset to the two outputs of the layer. The number of nodes in this layer is , and the membership function is selected as Gaussian.
- L3: This layer is connected with the node to generate corresponding fuzzy rules, and the number of nodes is . The output of the node is obtained by multiplying all the inputs of the node by fuzzy operation. The nodes of this layer are called rule nodes, and each node has its corresponding fuzzy rules. The output of this layer can be expressed as:
- L4: After the defuzzification is completed, each node variable of this layer is transformed into the network output. The obtained data are transmitted to the flight control system. In this fuzzy neural network structure,where is the connection weight matrix between the layer and the upper node, and .
4.2.2. Approximation Algorithm of Fuzzy RBF Network
4.3. Controller Analysis
4.4. Nonlinear Dynamic Inverse Controller
5. Simulation Results
5.1. Dynamic Response Characteristic Experiment
5.2. Attitude Angle Tracking Experiment without Interference
5.3. Attitude Angle Experiment under Turbulent Disturbance
6. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Tran, V.P.; Santoso, F.; Garrat, M.A.; Anavatti, S.G. Neural network-based self-learning of an adaptive strictly negative imaginary tracking controller for a quadrotor transporting a cable-suspended payload with minimum swing. IEEE Trans. Ind. Electron. 2021, 68, 10258–10268. [Google Scholar] [CrossRef]
- Kim, S.; Kim, D.; Jeong, S.; Ham, J.W.; Lee, J.K.; Oh, K.Y. Fault diagnosis of power transmission lines using a uav-mounted smart inspection system. IEEE Access 2020, 8, 149999–150009. [Google Scholar] [CrossRef]
- Zhang, H.T.; Hu, B.B.; Xu, Z.C.; Cai, Z.; Liu, B.; Wang, X.D.; Geng, T.; Zhong, S.; Zhao, J. Visual navigation and landing control of an unmanned aerial vehicle on a moving autonomous surface vehicle via adaptive learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5345–5355. [Google Scholar] [CrossRef] [PubMed]
- He, H.X.; Duan, H.B. A multi-strategy pigeon-inspired optimization approach to active disturbance rejection control parameters tuning for vertical take-off and landing fixed-wing uav. Chin. J. Aeronaut. 2022, 35, 19–30. [Google Scholar] [CrossRef]
- Wang, C.L.; Herbst, A.; Zeng, A.J.; Wongsuk, S.; Qiao, B.Y.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.L.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 14. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Park, D.; Ngoc, D.N.; Xuan-Mung, N.; Huynh, T.T.; Nguyen, T.N.; Hong, S.K. Quadrotor formation control via terminal sliding mode approach: Theory and experiment results. Drones 2022, 6, 172. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, S.D.; Wang, G.B.; Lan, Y.B. Drift evaluation of a quadrotor unmanned aerial vehicle (uav) sprayer: Effect of liquid pressure and wind speed on drift potential based on wind tunnel test. Appl. Sci. 2021, 11, 7258. [Google Scholar] [CrossRef]
- Najm, A.A.; Ibraheem, I.K. Altitude and attitude stabilization of uav quadrotor system using improved active disturbance rejection control. Arab. J. Sci. Eng. 2020, 45, 1985–1999. [Google Scholar] [CrossRef]
- Ji, H.L.; Chen, R.L.; Li, P. Real-time simulation model for helicopter flight task analysis in turbulent atmospheric environment. Aerosp. Sci. Technol. 2019, 92, 289–299. [Google Scholar] [CrossRef]
- Meenu, R.N.; Sunilkumar, K.; Singh, V.P.; Pandithurai, G.; Kalapureddy, M.C.R. Atmospheric turbulence characteristics in the troposphere and lower stratosphere of core monsoon zone. Atmos. Res. 2022, 279, 14. [Google Scholar] [CrossRef]
- Andrade, F.A.A.; Guedes, I.P.; Carvalho, G.F.; Zachi, A.R.L.; Haddad, D.B.; Almeida, L.F.; de Melo, A.G.; Pinto, M.F. Unmanned aerial vehicles motion control with fuzzy tuning of cascaded-pid gains. Machines 2022, 10, 12. [Google Scholar] [CrossRef]
- El Gmili, N.; Mjahed, M.; El Kari, A.; Ayad, H. Particle swarm optimization based proportional-derivative parameters for unmanned tilt-rotor flight control and trajectory tracking. Automatika 2020, 61, 189–206. [Google Scholar] [CrossRef]
- Song, J.; Hu, Y.; Su, J.; Zhao, M.; Ai, S. Fractional-order linear active disturbance rejection control design and optimization based improved sparrow search algorithm for quadrotor uav with system uncertainties and external disturbance. Drones 2022, 6, 229. [Google Scholar] [CrossRef]
- Kaba, A. Improved pid rate control of a quadrotor with a convexity-based surrogated model. Aircr. Eng. Aerosp. Technol. 2021, 93, 1287–1301. [Google Scholar] [CrossRef]
- Elkhatem, A.S.; Engin, S.N. Robust lqr and lqr-pi control strategies based on adaptive weighting matrix selection for a uav position and attitude tracking control. Alex. Eng. J. 2022, 61, 6275–6292. [Google Scholar] [CrossRef]
- Smeur, E.J.J.; de Croon, G.; Chu, Q. Cascaded incremental nonlinear dynamic inversion for mav disturbance rejection. Control Eng. Pract. 2018, 73, 79–90. [Google Scholar] [CrossRef]
- Zheng, B.C.; Wu, Y.W.; Li, H.; Chen, Z.P. Adaptive sliding mode attitude control of quadrotor uavs based on the delta operator framework. Symmetry 2022, 14, 498. [Google Scholar] [CrossRef]
- Ahmed, N.; Shah, S.A.A. Adaptive output-feedback robust active disturbance rejection control for uncertain quadrotor with unknown disturbances. Eng. Comput. 2022, 39, 1473–1491. [Google Scholar] [CrossRef]
- Yang, W.; Cui, G.Z.; Li, Z.; Tao, C.B. Fuzzy approximation-based adaptive finite-time tracking control for a quadrotor uav with actuator faults. Int. J. Fuzzy Syst. 2022, 24, 3756–3769. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.Q.; Sun, M.W. Trajectory tracking control for a quadrotor unmanned aerial vehicle based on dynamic surface active disturbance rejection control. Trans. Inst. Meas. Control 2020, 42, 2198–2205. [Google Scholar] [CrossRef]
- Noordin, A.; Mohd Basri, M.A.; Mohamed, Z.; Mat Lazim, I. Adaptive pid controller using sliding mode control approaches for quadrotor uav attitude and position stabilization. Arab. J. Sci. Eng. 2020, 46, 963–981. [Google Scholar] [CrossRef]
- Li, K.W.; Wei, Y.R.; Wang, C.; Deng, H.B. Longitudinal attitude control decoupling algorithm based on the fuzzy sliding mode of a coaxial-rotor uav. Electronics 2019, 8, 107. [Google Scholar] [CrossRef]
- Sun, C.; Liu, M.; Liu, C.a.; Feng, X.; Wu, H. An industrial quadrotor uav control method based on fuzzy adaptive linear active disturbance rejection control. Electronics 2021, 10, 376. [Google Scholar] [CrossRef]
- Muthusamy, P.K.; Garratt, M.; Pota, H.; Muthusamy, R. Real-time adaptive intelligent control system for quadcopter unmanned aerial vehicles with payload uncertainties. IEEE Trans. Ind. Electron. 2022, 69, 1641–1653. [Google Scholar] [CrossRef]
- Muliadi, J.; Kusumoputro, B. Neural network control system of uav altitude dynamics and its comparison with the pid control system. J. Adv. Transp. 2018, 2018, 3823201. [Google Scholar] [CrossRef]
- Kayacan, E.; Khanesar, M.A.; Rubio-Hervas, J.; Reyhanoglu, M. Learning control of fixed-wing unmanned aerial vehicles using fuzzy neural networks. Int. J. Aerosp. Eng. 2017, 2017, 5402809. [Google Scholar] [CrossRef]
- Wai, R.J.; Prasetia, A.S. Adaptive neural network control and optimal path planning of uav surveillance system with energy consumption prediction. IEEE Access 2019, 7, 126137–126153. [Google Scholar] [CrossRef]
- Sarabakha, A.; Imanberdiyev, N.; Kayacan, E.; Khanesar, M.A.; Hagras, H. Novel levenberg-marquardt based learning algorithm for unmanned aerial vehicles. Inf. Sci. 2017, 417, 361–380. [Google Scholar] [CrossRef]
- Tran, V.P.; Mabrok, M.A.; Garratt, M.A.; Petersen, I.R. Hybrid adaptive negative imaginary- neural-fuzzy control with model identification for a quadrotor. IFAC J. Syst. Control 2021, 16, 100156. [Google Scholar] [CrossRef]
- Rai, S.N.; Jawahar, C.V. Removing atmospheric turbulence via deep adversarial learning. IEEE Trans. Image Process. 2022, 31, 2633–2646. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Z.X.; Yang, L.B.; Wang, D.; Tang, Y.M. Modeling and controller design of tilt-rotor uav under wind disturbance. Flight Dyn. 2021, 39, 38–44. [Google Scholar] [CrossRef]
- Wang, B.; Shen, Y.; Zhang, Y. Active fault-tolerant control for a quadrotor helicopter against actuator faults and model uncertainties. Aerosp. Sci. Technol. 2020, 99, 105745. [Google Scholar] [CrossRef]
- Liu, X.Y.; Wang, W.T.; Wang, Y.D.; Shao, C.; Cong, Q.M. Coordinated optimization control of shield machine based on dynamic fuzzy neural network direct inverse control. Trans. Inst. Meas. Control 2021, 43, 1445–1451. [Google Scholar] [CrossRef]
- Rao, J.; Li, B.; Zhang, Z.; Chen, D.; Giernacki, W. Position control of quadrotor uav based on cascade fuzzy neural network. Energies 2022, 15, 1763. [Google Scholar] [CrossRef]
- Yu, H.; Lu, J.; Zhang, G.Q. Topology learning-based fuzzy random neural networks for streaming data regression. IEEE Trans. Fuzzy Syst. 2022, 30, 412–425. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 143.59 | 71.79 | 10 | 1.93 | 3.72 | 1 |
| Parameter | Unit | Value | Parameter | Unit | Value |
| Controller | Maximum Overshoot | Rise Time(s) | Settling Time(s) | Steady-State Error |
|---|---|---|---|---|
| 31.6% | 0.231 | 2.577 | 5% | |
| 0% | 0.663 | 1.242 | 0% | |
| 0% | 0.142 | 0.271 | 0% |
| Parameter Name | Channel | |||
|---|---|---|---|---|
| Maximum Overshoot | Roll | 5% | 0% | 0% |
| Pitch | 6.6% | 0% | 0% | |
| Yaw | 9.34% | 0% | 0% | |
| Settling Time(s) | Roll | 2.377 | 0.694 | 0.399 |
| Pitch | 2.738 | 0.558 | 0.252 | |
| Yaw | 1.515 | 0.518 | 0.133 | |
| Recovery Time(s) | Roll | 2.269 | 0.507 | 0.271 |
| Pitch | 2.410 | 0.505 | 0.219 | |
| Yaw | 1.324 | 0604 | 0.140 |
| Channel | |||
|---|---|---|---|
| 0.098 | 0.013 | 0.006 | |
| 0.625 | 0.127 | 0.032 | |
| 0.047 | 0.011 | 0.003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Cheng, B.; Lv, C.; Wang, Y.; Lu, P. Fuzzy Neural Network Dynamic Inverse Control Strategy for Quadrotor UAV Based on Atmospheric Turbulence. Appl. Sci. 2022, 12, 12232. https://doi.org/10.3390/app122312232
Yang Z, Cheng B, Lv C, Wang Y, Lu P. Fuzzy Neural Network Dynamic Inverse Control Strategy for Quadrotor UAV Based on Atmospheric Turbulence. Applied Sciences. 2022; 12(23):12232. https://doi.org/10.3390/app122312232
Chicago/Turabian StyleYang, Zhibo, Ben Cheng, Chengxing Lv, Yanqian Wang, and Peng Lu. 2022. "Fuzzy Neural Network Dynamic Inverse Control Strategy for Quadrotor UAV Based on Atmospheric Turbulence" Applied Sciences 12, no. 23: 12232. https://doi.org/10.3390/app122312232
APA StyleYang, Z., Cheng, B., Lv, C., Wang, Y., & Lu, P. (2022). Fuzzy Neural Network Dynamic Inverse Control Strategy for Quadrotor UAV Based on Atmospheric Turbulence. Applied Sciences, 12(23), 12232. https://doi.org/10.3390/app122312232