
Development of Permanently Installed Magnetic Eddy Current Sensor for Corrosion Monitoring of Ferromagnetic Pipelines

 , ,
, ,
Abstract
:1. Introduction
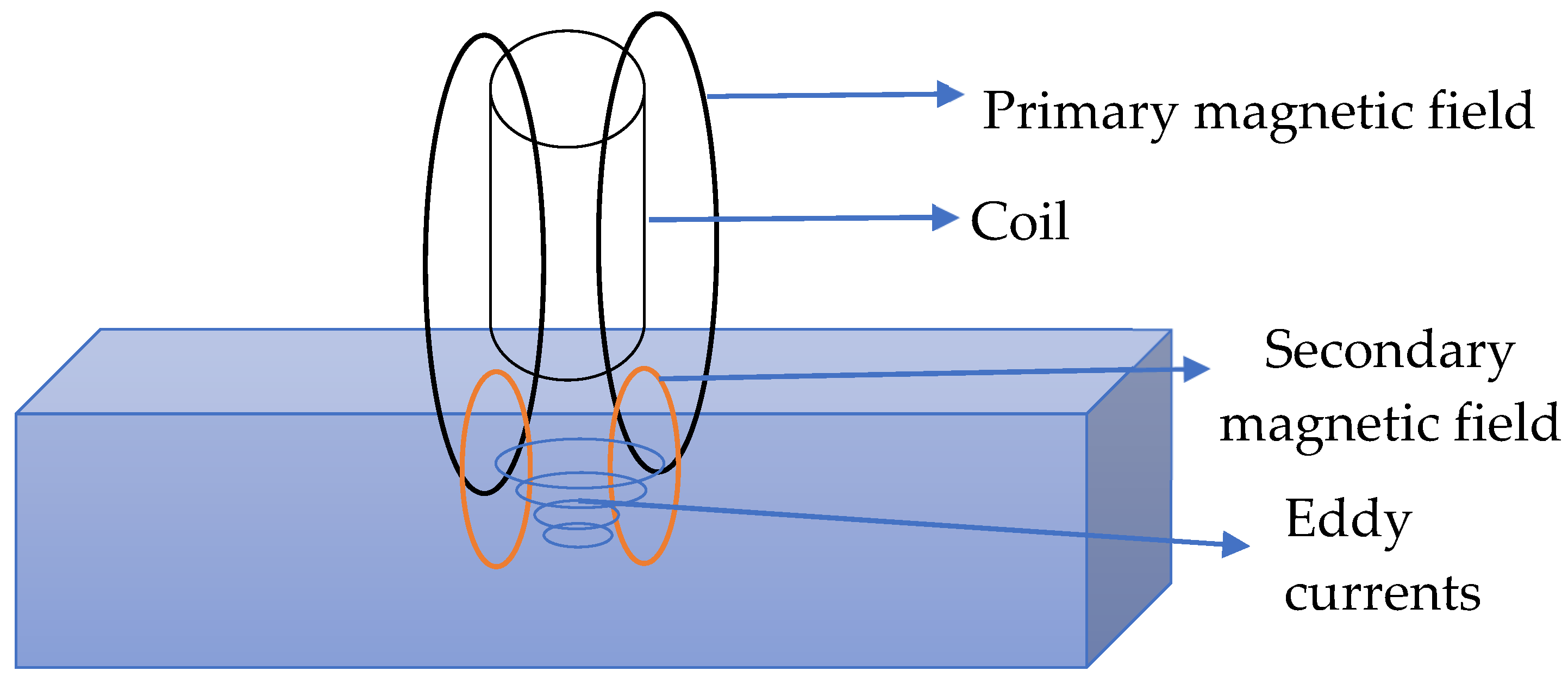
2. Working Principle
3. Sensitivity Optimization
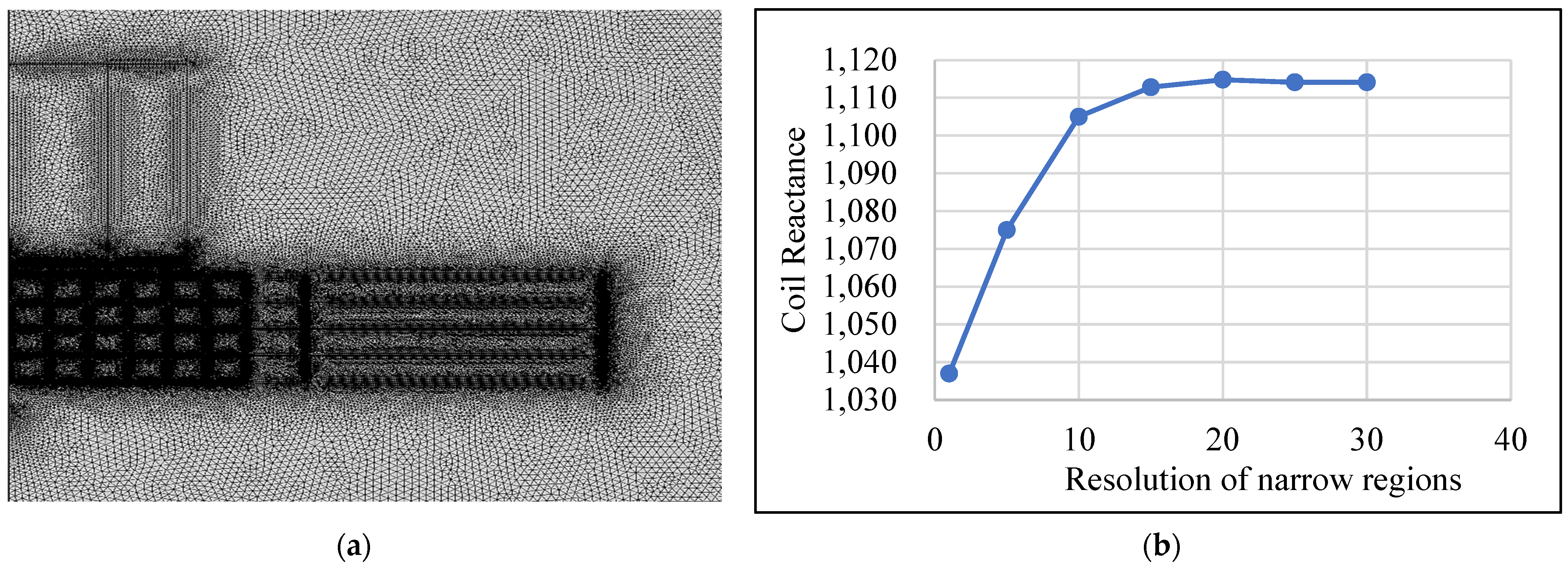
3.1. Finite Element Modelling
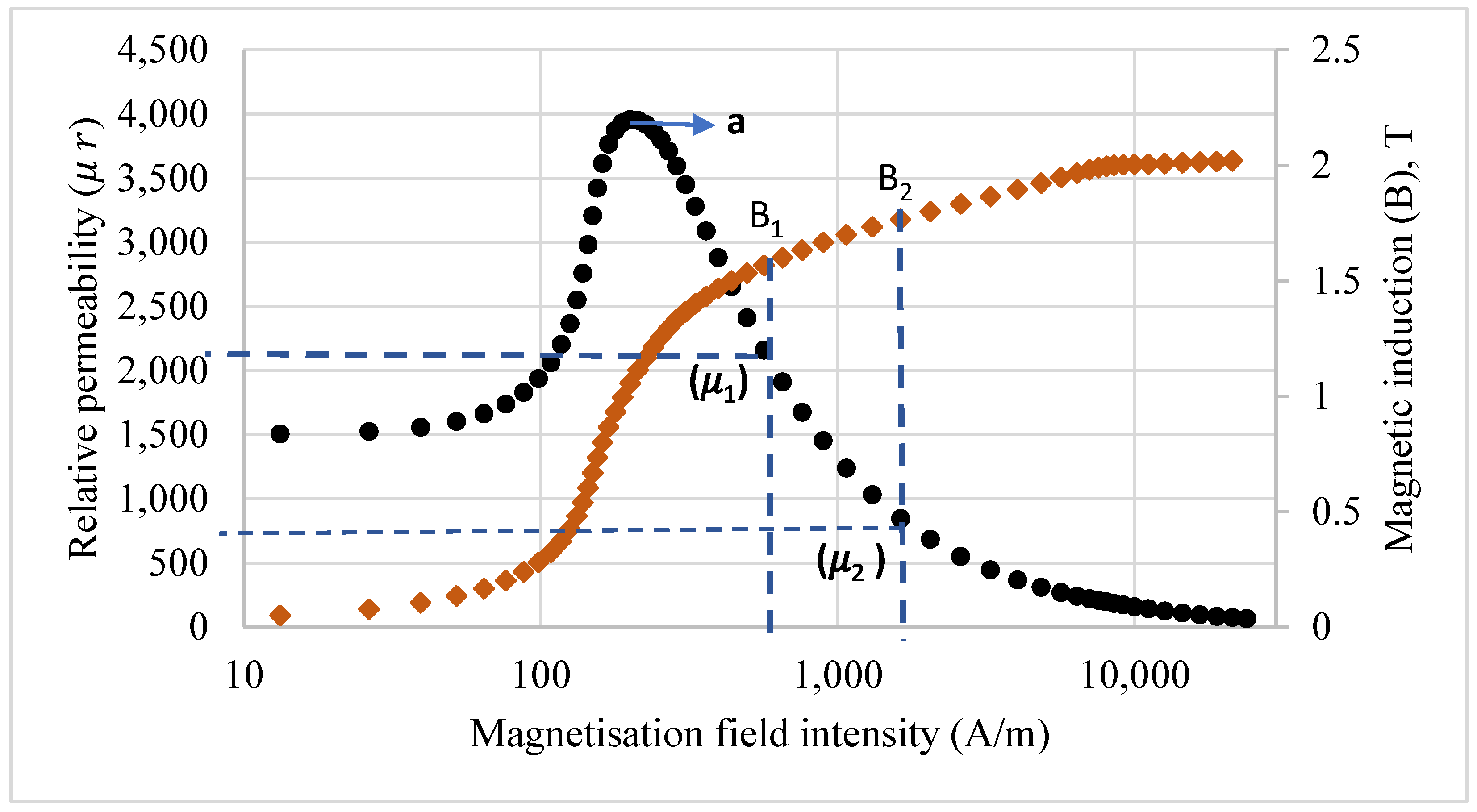
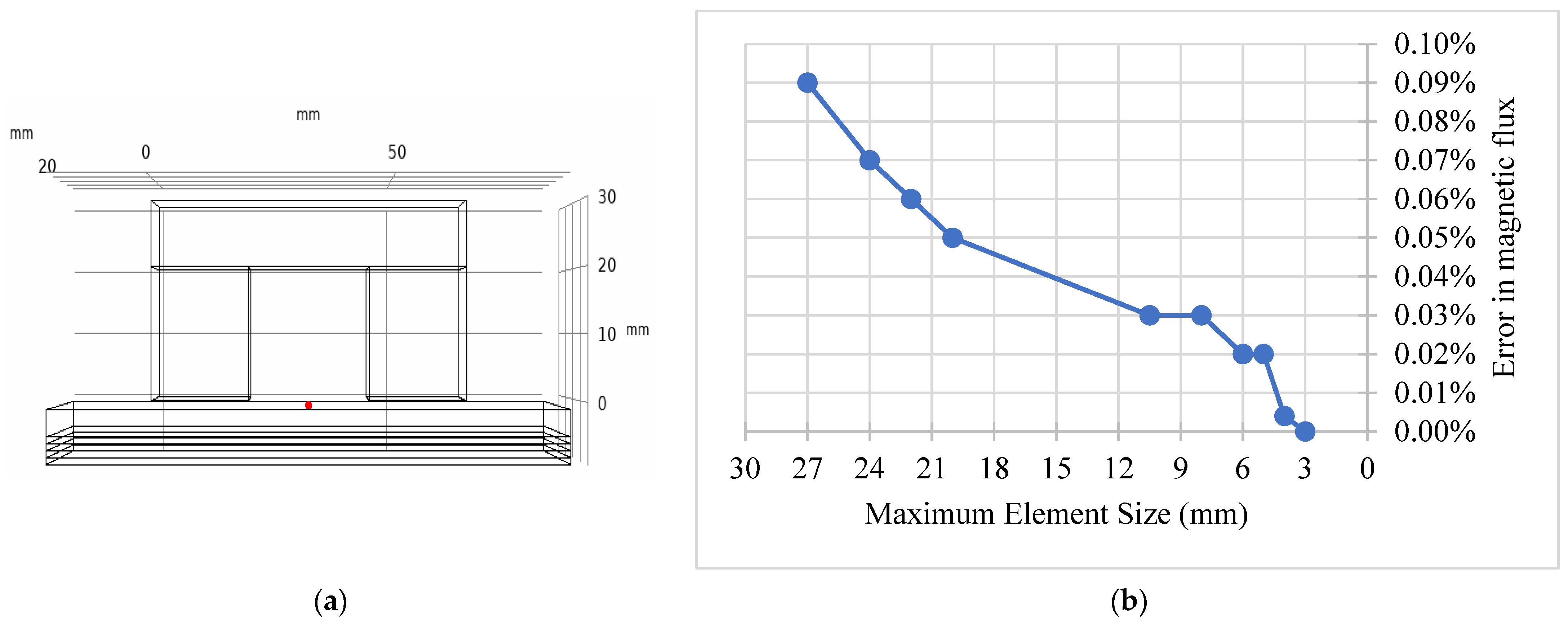
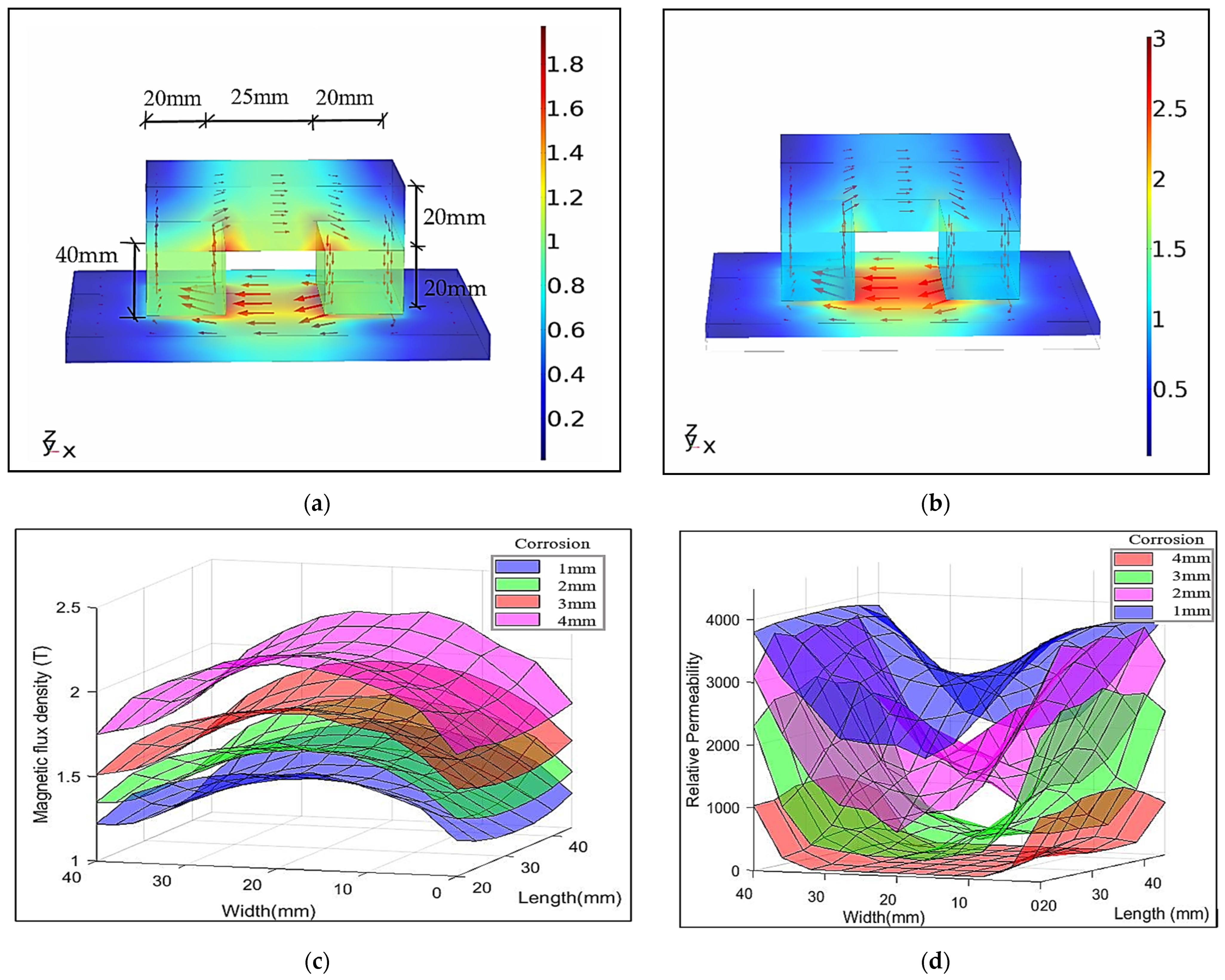
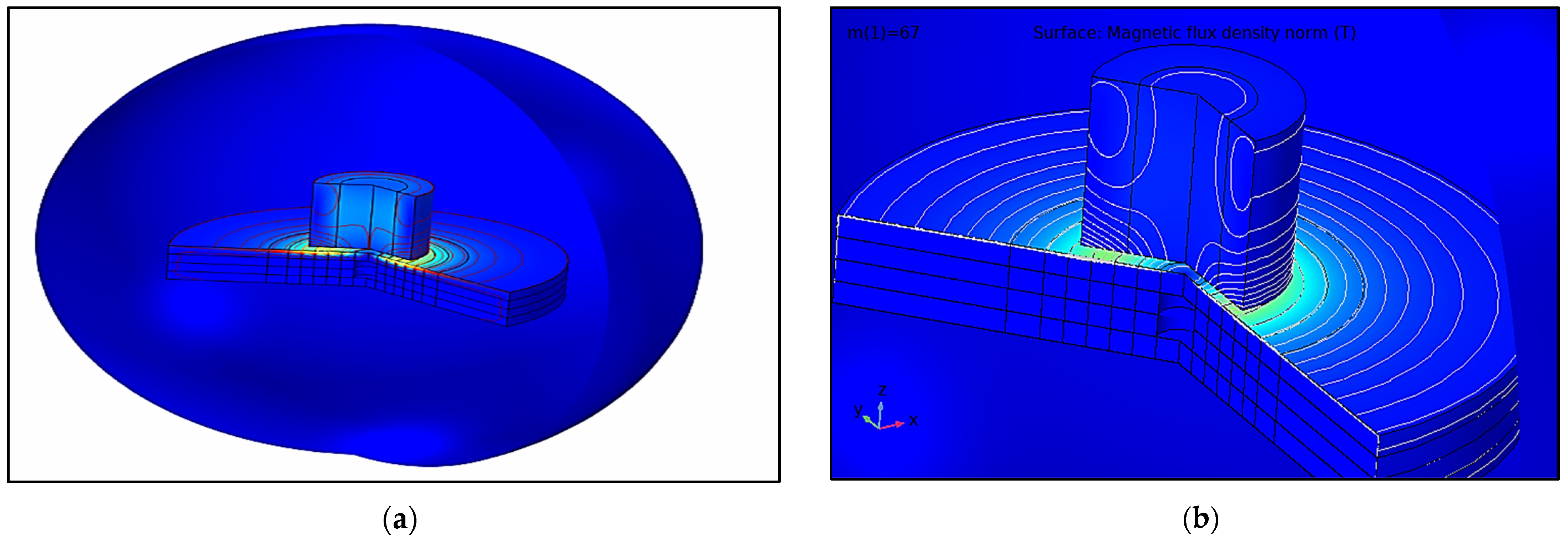
3.1.1. Magneto-Static Modelling
3.1.2. AC Modelling
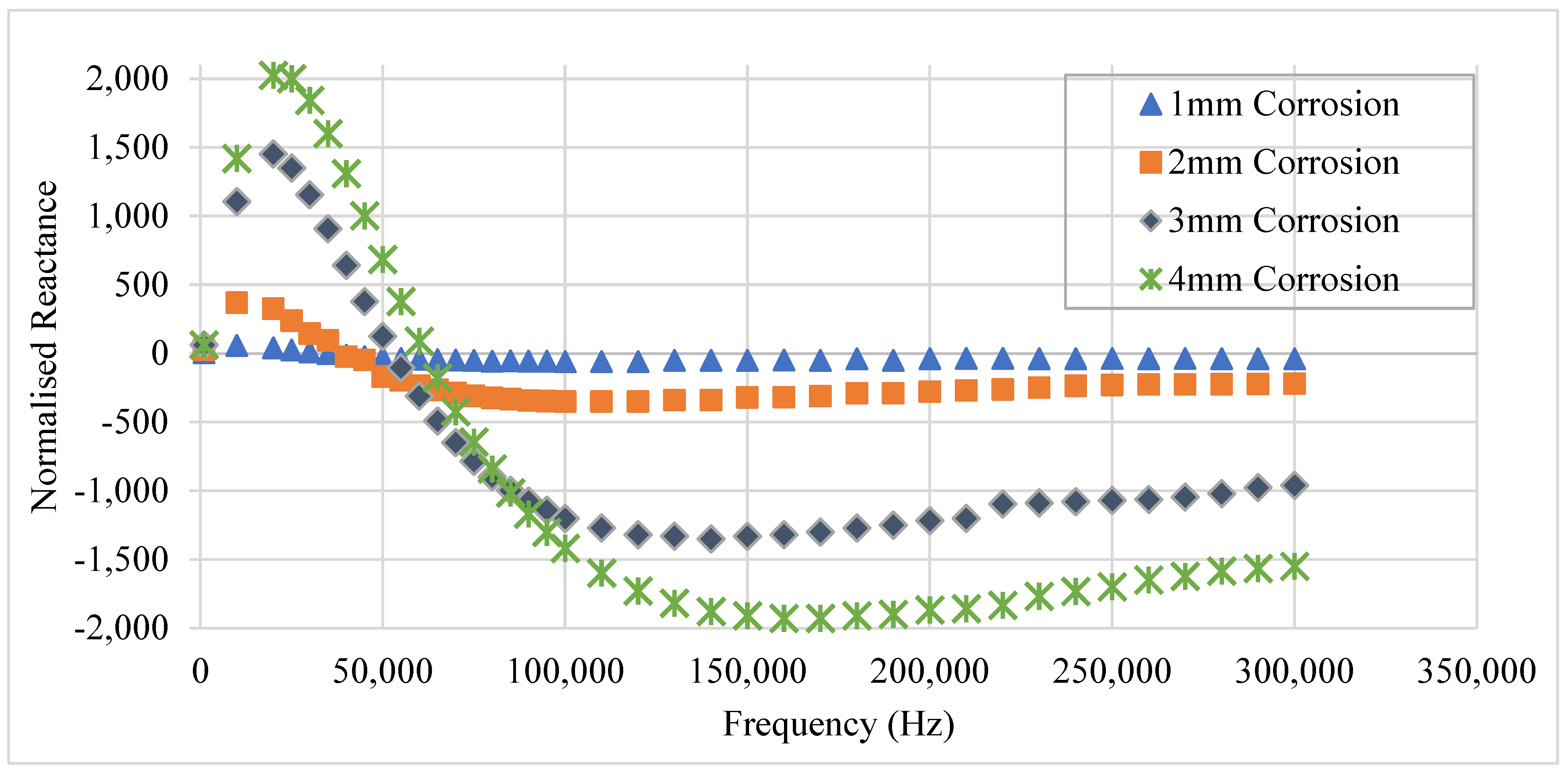
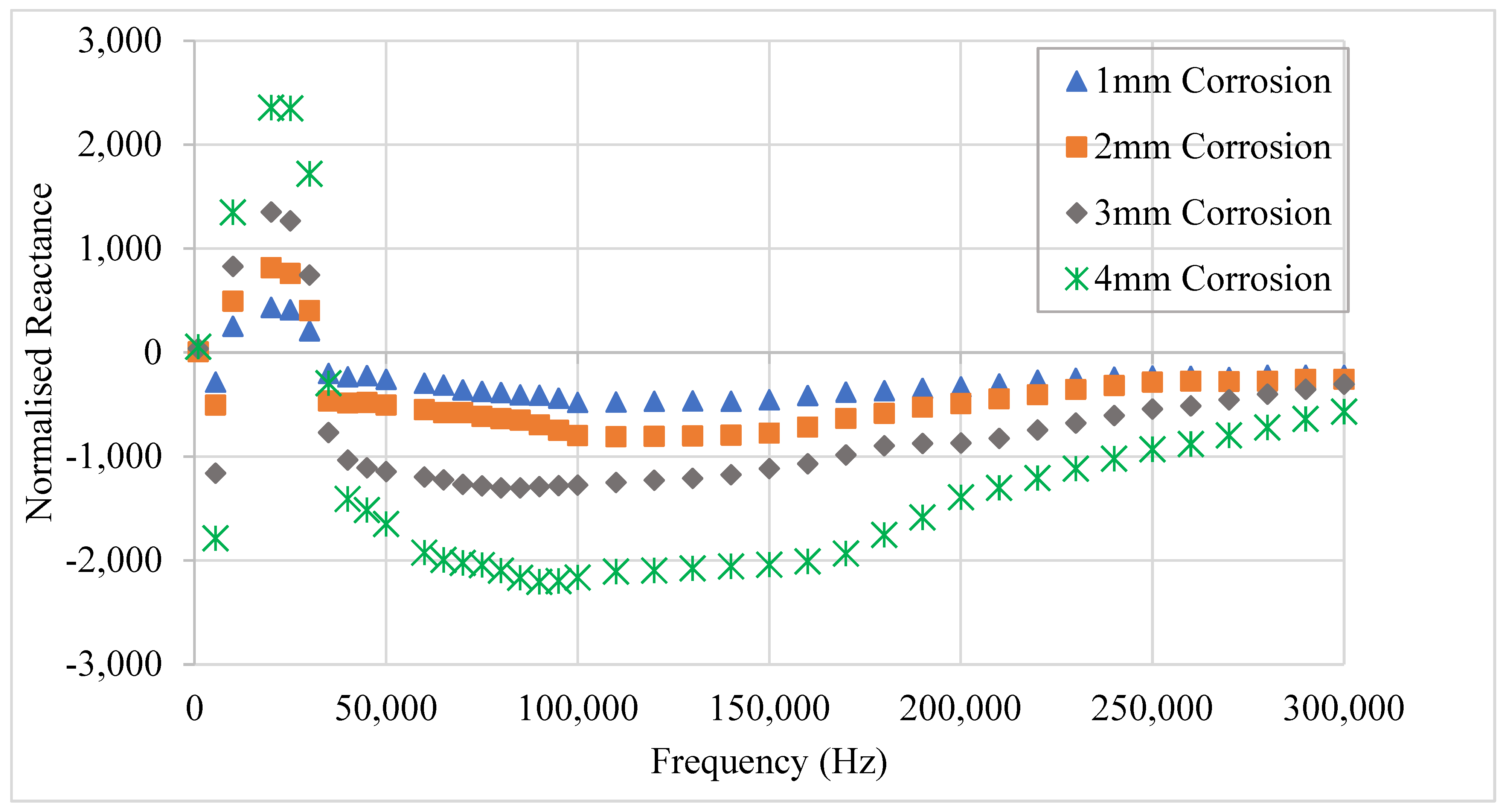
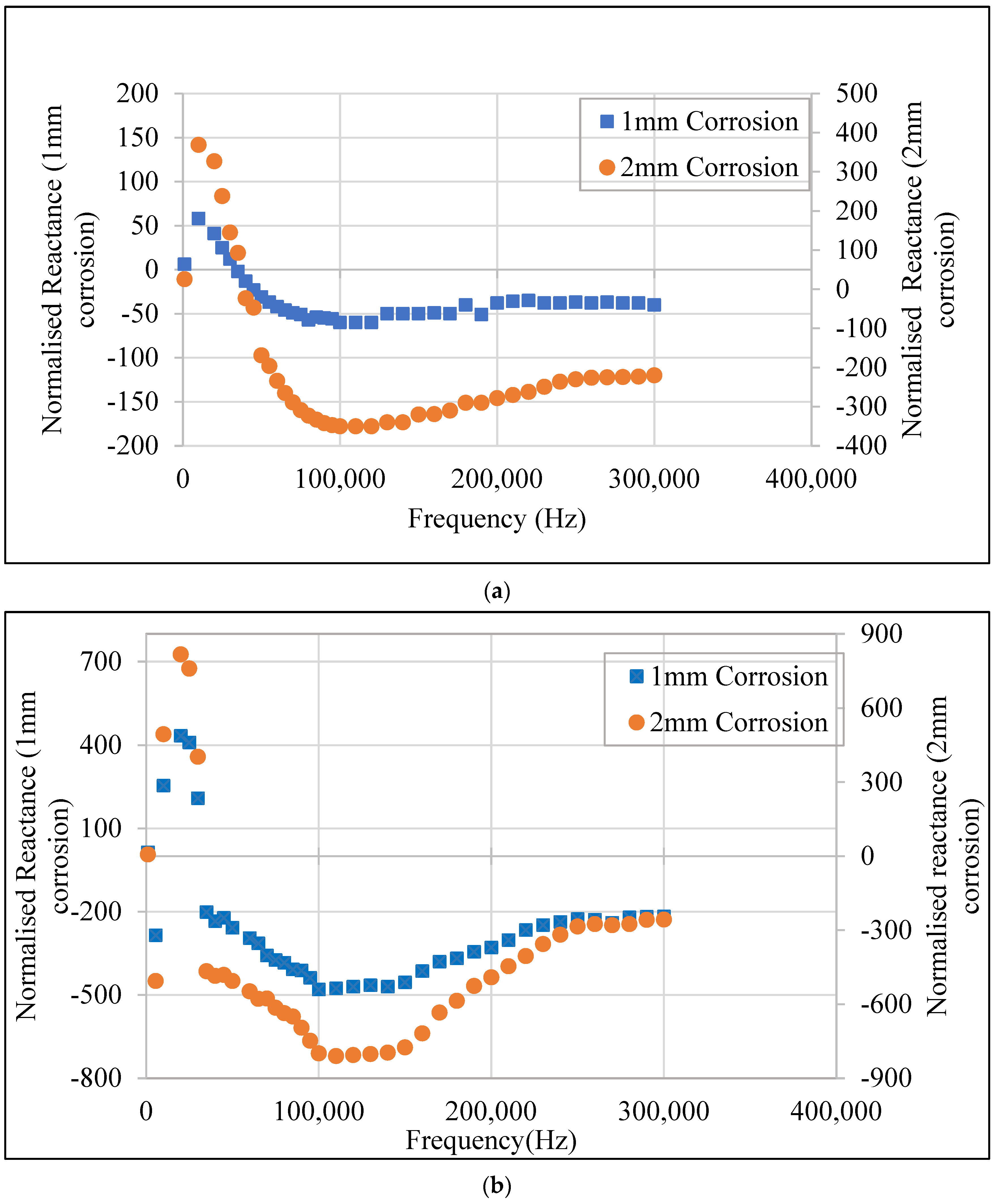
3.1.3. Experimental Studies for Frequency Optimization
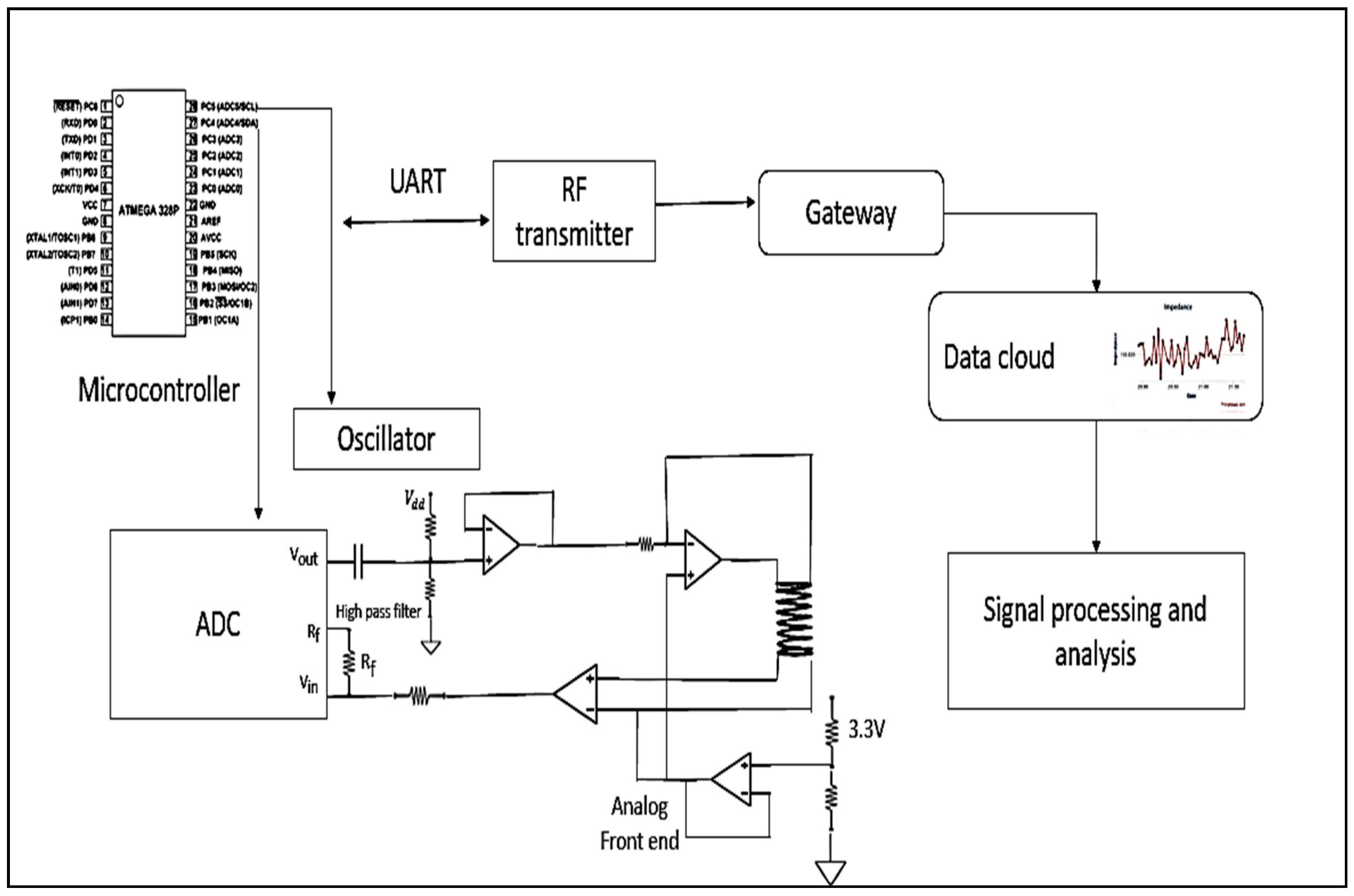
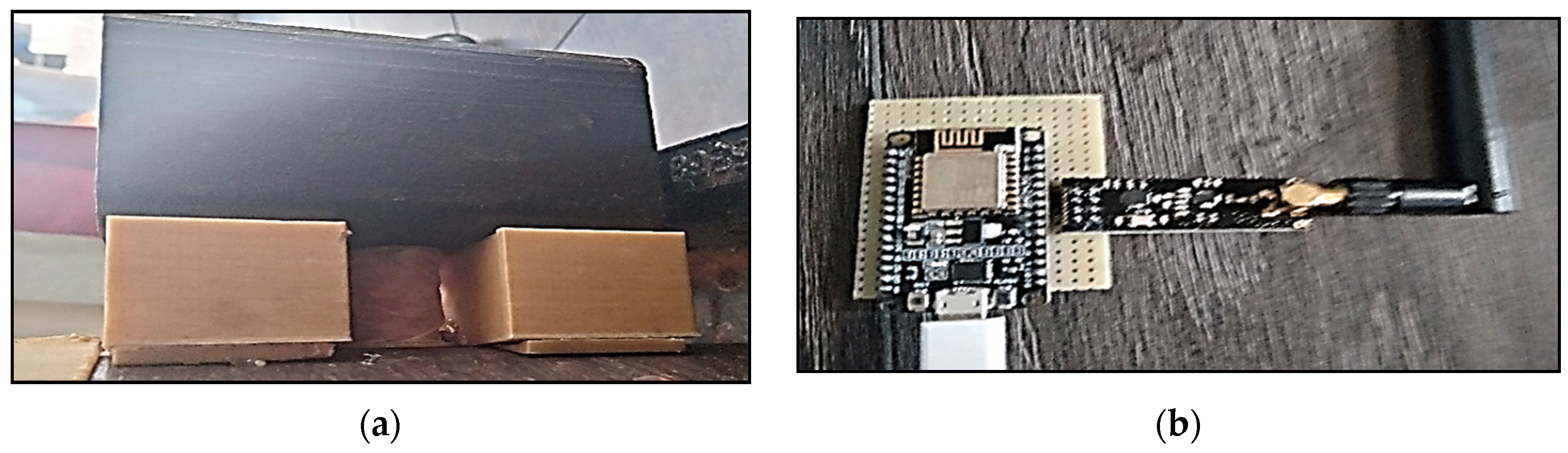
4. Design of the Wireless MEC Sensor
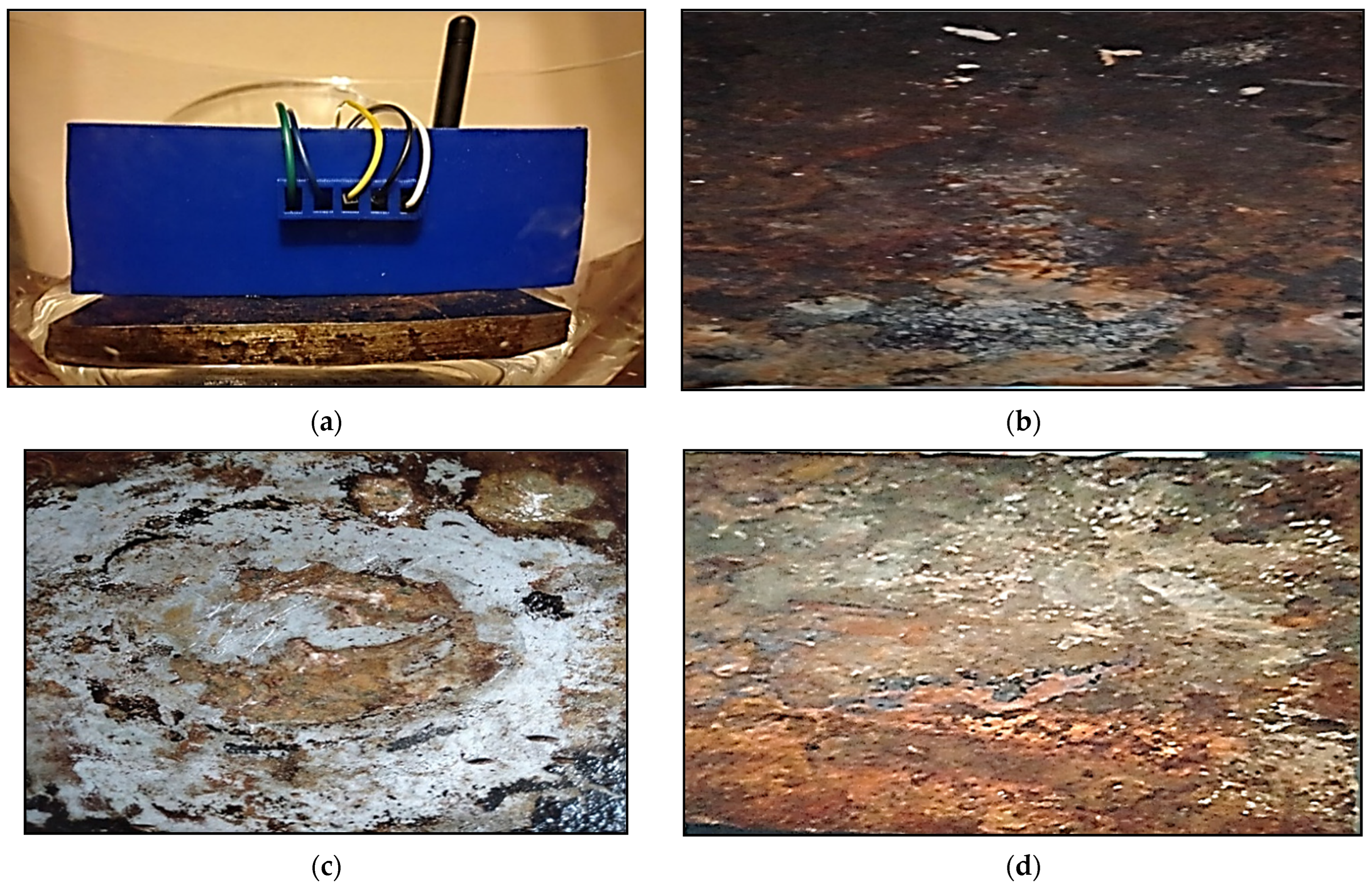
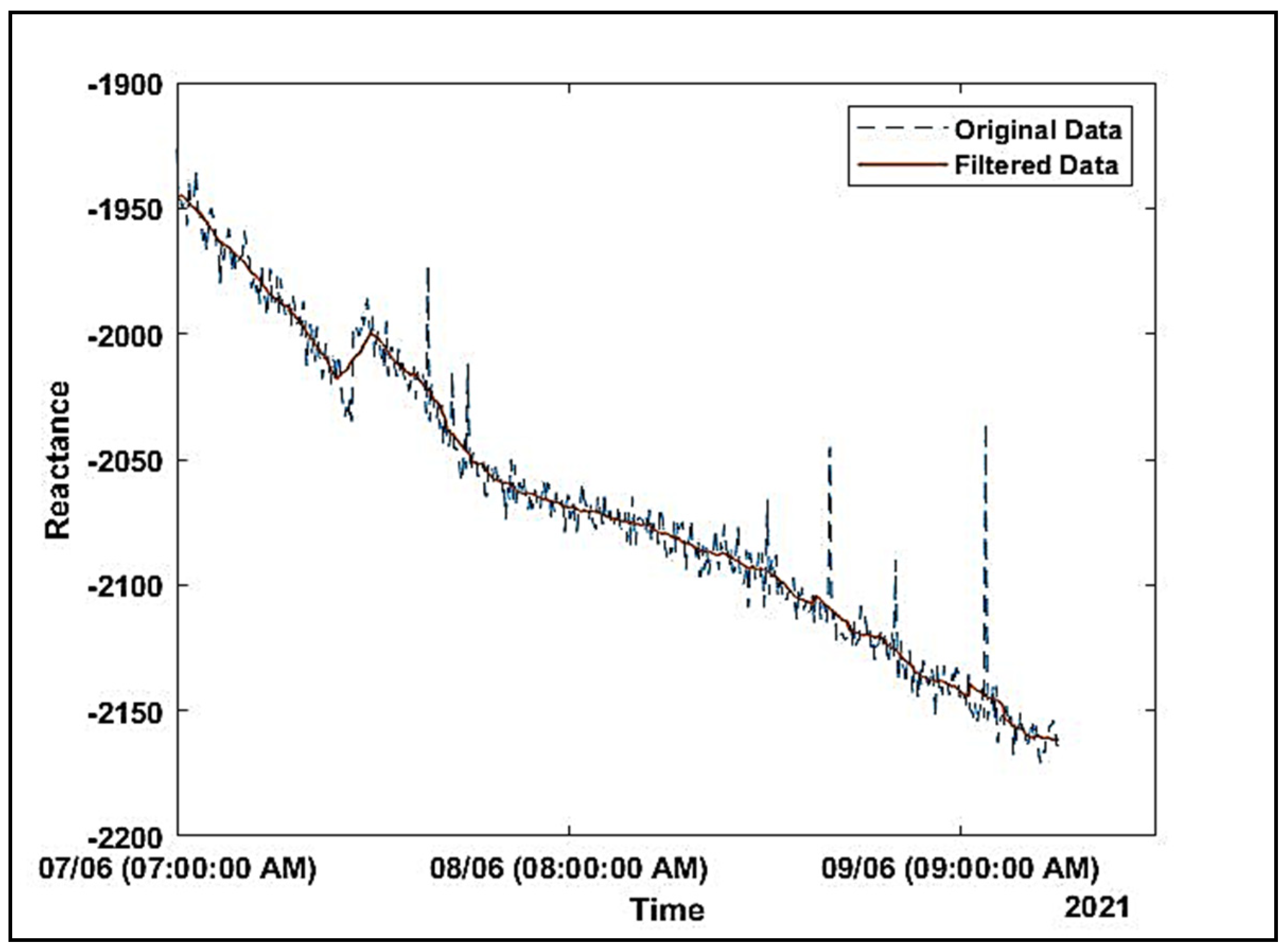
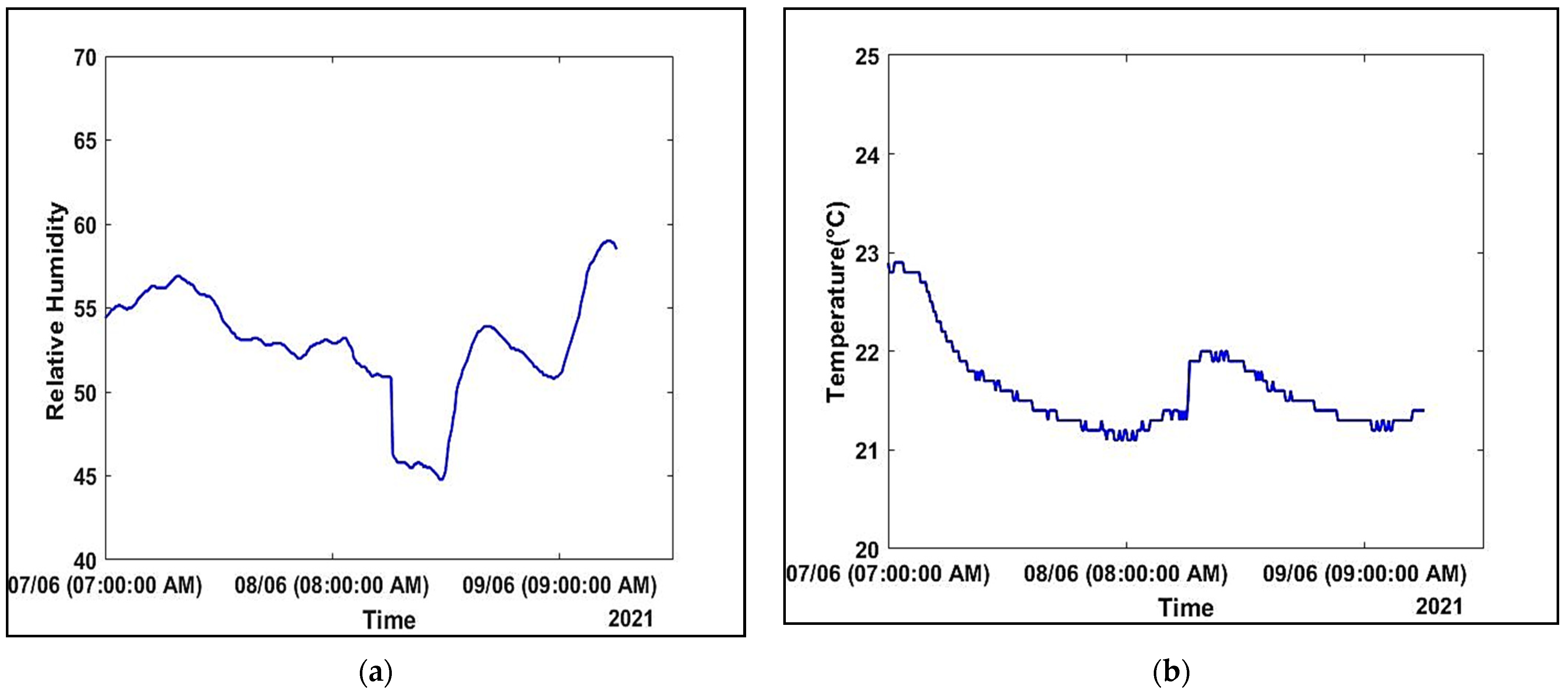
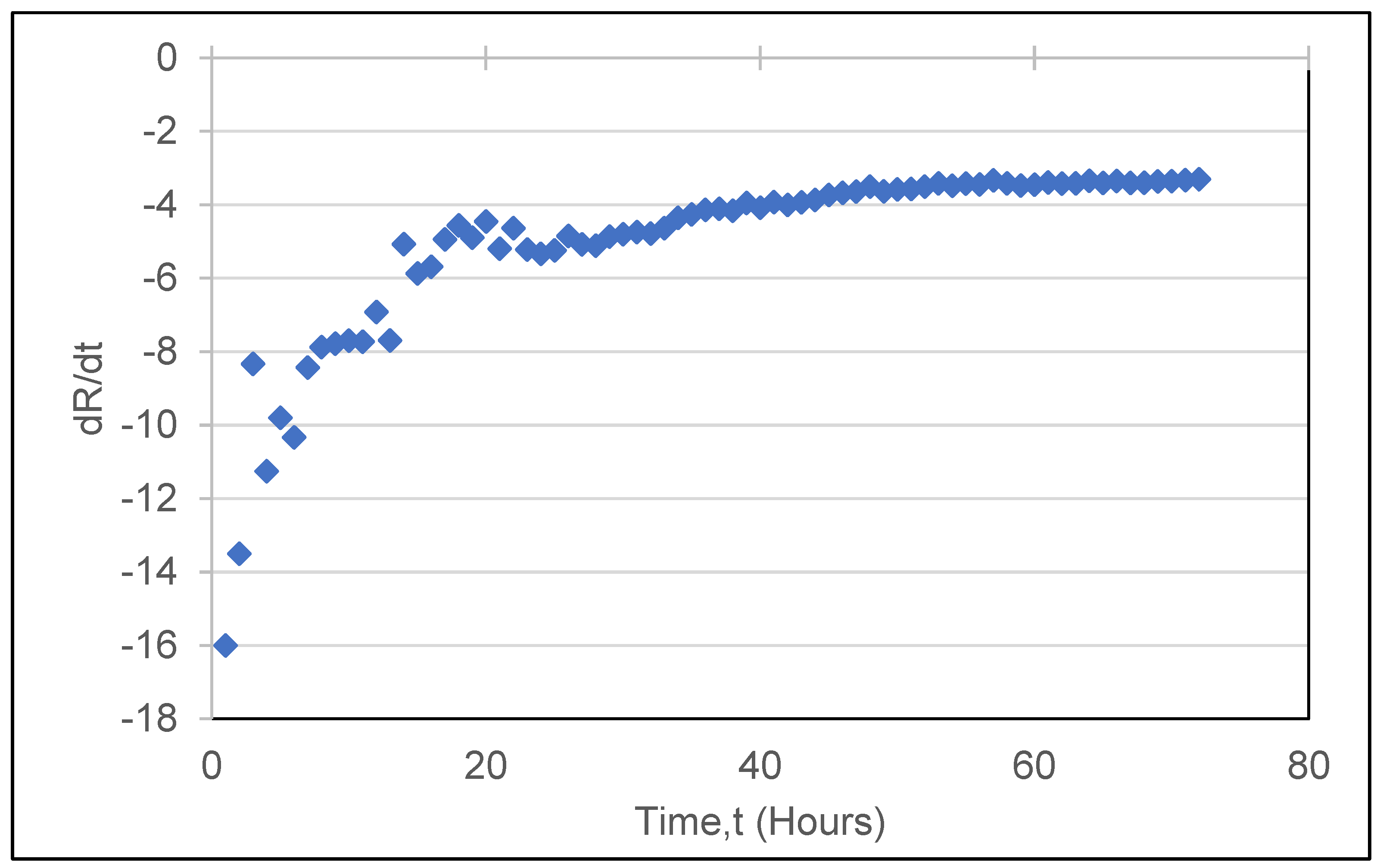
Accelerated Corrosion Test Setup and Results
5. Discussion
6. Conclusions
7. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jacobson, G.A. NACE International’s IMPACT Study Breaks New Ground in Corrosion Management Research and Practice. In The Bridge; National Academy of Engineering: Washington, DC, USA, 2016; Volume 46. [Google Scholar]
- European Gas Pipeline Incident Data Group (EGIG). 11th Report of the European Gas Pipeline Incident Data Group (Period 1970–2019), December 2020. Available online: https://www.egig.eu/reports (accessed on 10 August 2021).
- Phmsa.dot.gov. Pipeline Incident 20 Year Trends|PHMSA. 2021. Available online: https://www.phmsa.dot.gov/data-and-statistics/pipeline/pipeline-incident-20-year-trends (accessed on 25 August 2021).
- Elankavi, R.S.; Dinakaran, D.; Jose, J. Developments in inpipe inspection robot: A review. J. Mech. Cont. Math. Sci. 2020, 15, 238–248. [Google Scholar]
- Alnaimi, F.B.I.; Mazraeh, A.A.; Sahari, K.S.M.; Weria, K.; Moslem, Y. Design of a multi-diameter in-line cleaning and fault detection pipe pigging device. In Proceedings of the 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Langkawi, Malaysia, 18–20 October 2015; pp. 258–265. [Google Scholar]
- Mazraeh, A.A.; Ismail, F.B.; Khaksar, W.; Sahari, K. Development of Ultrasonic Crack Detection System on Multi-diameter PIG Robots. Procedia Comput. Sci. 2017, 105, 282–288. [Google Scholar] [CrossRef]
- Ramirez-Martinez, A.; Rodríguez-Olivares, N.A.; Torres-Torres, S.; Ronquillo-Lomelí, G.; Soto-Cajiga, J.A. Design and Validation of an Articulated Sensor Carrier to Improve the Automatic Pipeline Inspection. Sensors 2019, 19, 1394. [Google Scholar] [CrossRef] [Green Version]
- Wright, R.F.; Lu, P.; Devkota, J.; Lu, F.; Ziomek-Moroz, M.; Ohodnicki, J.P.R. Corrosion Sensors for Structural Health Monitoring of Oil and Natural Gas Infrastructure: A Review. Sensors 2019, 19, 3964. [Google Scholar] [CrossRef] [Green Version]
- Xie, M.; Tian, Z. A review on pipeline integrity management utilizing in-line inspection data. Eng. Fail. Anal. 2018, 92, 222–239. [Google Scholar] [CrossRef]
- Cegla, F.; Allin, J. Ultrasonic Monitoring of Pipeline Wall Thickness with Autonomous, Wireless Sensor Networks. Oil Gas Pipelines 2015, 571–578. [Google Scholar] [CrossRef]
- Goedecke, H. Ultrasonic or MFL inspection: Which technology is better for you. Pipeline Gas J. 2003, 230, 34–41. [Google Scholar]
- Vujic, D. Wireless sensor networks applications in aircraft structural health monitoring. J. Appl. Eng. Sci. 2015, 13, 79–86. [Google Scholar] [CrossRef]
- Deivasigamani, A.; Daliri, A.; Wang, C.H.; John, S. A review of passive wireless sensors for structural health monitoring. Mod. Appl. Sci. 2013, 7, 57. [Google Scholar] [CrossRef]
- Zhou, S.; Sheng, W.; Deng, F.; Wu, X.; Fu, Z. A Novel Passive Wireless Sensing Method for Concrete Chloride Ion Concentration Monitoring. Sensors 2017, 17, 2871. [Google Scholar] [CrossRef] [Green Version]
- Perveen, K.; Bridges, G.E.; Bhadra, S.; Thomson, D.J. Corrosion Potential Sensor for Remote Monitoring of Civil Structure Based on Printed Circuit Board Sensor. IEEE Trans. Instrum. Meas. 2014, 63, 2422–2431. [Google Scholar] [CrossRef]
- Twigg, H.K.; Molinari, M. Test results for a capacitance-based corrosion sensor. In Proceedings of the Thirteenth International Conference on Condition Monitoring and Machine Failure Prevention Technologies, Paris, France, 10–12 October 2016. [Google Scholar]
- Malik, A.F.; Burhanudin, Z.A.; Jeoti, V. A flexible polyimide based SAW delay line for corrosion detection. In Proceedings of the 2011 National Postgraduate Conference, Perak, Malaysia, 19–20 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–6. [Google Scholar]
- Cawley, P.; Cegla, F.; Galvagni, A. Guided waves for NDT and permanently-installed monitoring. Insight-Non-Destr. Test. Cond. Monit. 2012, 54, 594–601. [Google Scholar] [CrossRef]
- Cegla, F. Ultrasonic Monitoring of Corrosion with Permanently Installed Sensors (PIMS). In Sensors, Algorithms and Applications for Structural Health Monitoring; Springer: Singapore, 2018; pp. 13–20. [Google Scholar]
- Jarvis, R.; Cawley, P.; Nagy, P.B. Permanently installed corrosion monitoring using magnetic measurement of current deflection. Struct. Health Monit. 2018, 17, 227–239. [Google Scholar] [CrossRef]
- Krivoi, G.S. No Pig: A new inspection technique for non-piggable pipelines. In Proceedings of the Germany: Pipeline Technology Conference, Hannover, Germany, 16–17 April 2007. [Google Scholar]
- Li, E.; Wu, J.; Zhu, J.; Kang, Y. Quantitative Evaluation of Buried Defects in Ferromagnetic Steels Using DC Magnetization-Based Eddy Current Array Testing. IEEE Trans. Magn. 2020, 56, 1–11. [Google Scholar] [CrossRef]
- Chikami, T.; Fukuoka, K. Consideration of magnetic saturation ECT using AC magnetisation. Int. J. Appl. Electromagn. Mech. 2019, 59, 1331–1339. [Google Scholar] [CrossRef]
- Long, Y.; Huang, S.; Zheng, Y.; Wang, S.; Zhao, W. A Method Using Magnetic Eddy Current Testing for Distinguishing ID and OD Defects of Pipelines under Saturation Magnetization. Appl. Comput. Electromagn. Soc. J. 2020, 35, 1089–1098. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, Y.; Kang, Y.; Song, K.; Wang, R. A Permeability-Measuring Magnetic Flux Leakage Method for Inner Surface Crack in Thick-Walled Steel Pipe. J. Nondestruct. Eval. 2017, 36, 68. [Google Scholar] [CrossRef]
- Deng, Z.; Kang, Y.; Zhang, J.; Song, K. Multi-source effect in magnetizing-based eddy current testing sensor for surface crack in ferromagnetic materials. Sens. Actuators A Phys. 2018, 271, 24–36. [Google Scholar] [CrossRef]
- Sukhikh, A.V.; Sagalov, S.S. Application of the magnetic saturation method for eddy-current inspection of spent fuel elements from fast reactors. At. Energy 2007, 102, 139–145. [Google Scholar] [CrossRef]
- Ren, X.; Ren, S.; Fan, Q. Influence of excitation current characteristics on sensor sensitivity of permeability testing technology based on constant current source. In Proceedings of the 2018 7th International Conference on Energy, Environment and Sustainable Development (ICEESD 2018), Shenzhen, China, 30–31 March 2018; Atlantis Press: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Xu, J.; Wu, J.; Xin, W.; Ge, Z. Measuring Ultrathin Metallic Coating Properties Using Swept-Frequency Eddy-Current Technique. IEEE Trans. Instrum. Meas. 2020, 69, 5772–5781. [Google Scholar] [CrossRef]
- Lu, M.; Zhu, W.; Yin, L.; Peyton, A.; Yin, W.; Qu, Z. Reducing the Lift-Off Effect on Permeability Measurement for Magnetic Plates from Multifrequency Induction Data. IEEE Trans. Instrum. Meas. 2017, 67, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Rose, J.H.; Uzal, E.; Moulder, J.C. Magnetic Permeability and Eddy-Current Measurements. Rev. Prog. Quant. Nondestruct. Eval. 1995, 315–322. [Google Scholar] [CrossRef] [Green Version]
- Helifa, B.; Oulhadj, A.; Benbelghit, A.; Lefkaier, I.K.; Boubenider, F.; Boutassouna, D. Detection and measurement of surface cracks in ferromagnetic materials using eddy current testing. NDT E Int. 2006, 39, 384–390. [Google Scholar] [CrossRef]
- Al-Ali, A.; Elwakil, A.; Ahmad, A.; Maundy, B. Design of a portable low-cost impedance analyzer. In International Conference on Biomedical Electronics and Devices; SciTePress: Setúbal, Portugal, 2017; Volume 2, pp. 104–109. [Google Scholar]
- Tawie, R.; Da’ud, E. Low-cost impedance approach using AD5933 for sensing and monitoring applications. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 429, p. 012104. [Google Scholar]
- Chabowski, K.; Piasecki, T.; Dzierka, A.; Nitsch, K. Simple Wide Frequency Range Impedance Meter Based on AD5933 Integrated Circuit. Metrol. Meas. Syst. 2015, 22, 13–24. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Capabilities of finite element analysis and magnetic equivalent circuits for electrical machine analysis and design. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 4027–4033. [Google Scholar]
- Panossian, Z.; de Almeida, N.L.; De Sousa, R.M.F.; Pimenta, G.D.S.; Marques, L.B.S. Corrosion of carbon steel pipes and tanks by concentrated sulfuric acid: A review. Corros. Sci. 2012, 58, 1–11. [Google Scholar] [CrossRef]
- Damon, G.H. Acid corrosion of steel. Ind. Eng. Chem. 1941, 33, 67–69. [Google Scholar] [CrossRef]
- Dean, S.W.; Grab, G.D. Corrosion of carbon steel tanks in concentrated sulfuric acid service. Mater. Perform. 1986, 25, 48–52. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Material | Properties | |
|---|---|---|---|
| Magnets | Neodymium | Magnetization: | 835 kA/m |
| Relative Permeability: | 1.05 | ||
| Conductivity | 1 × 106 S/m | ||
| Iron Bar | Cast Iron | Relative Permeability: | 4000 |
| Electrical Conductivity | 11.2 × 106 S/m | ||
| Plate Sample | Low-carbon steel 1002 | Relative Permeability: | BH curve |
| Electrical Conductivity | 8.41 × 106 S/m | ||
| Element Size Parameters | Values |
|---|---|
| Maximum Element Size | 3 |
| Minimum Element Size | 0.05 |
| Maximum Element growth rate | 1.3 |
| Resolution of narrow regions | 1 |
| Coil Parameters | Values |
|---|---|
| Internal diameter (ID) | 10 mm |
| Outer diameter (OD) | 18 mm |
| Height | 15 mm |
| Number of turns | 350 |
| Element Size Parameters | Values |
|---|---|
| Maximum Element Size | 0.5 mm |
| Minimum Element Size | 0.02 |
| Maximum Element growth rate | 1.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wasif, R.; Tokhi, M.O.; Shirkoohi, G.; Marks, R.; Rudlin, J. Development of Permanently Installed Magnetic Eddy Current Sensor for Corrosion Monitoring of Ferromagnetic Pipelines. Appl. Sci. 2022, 12, 1037. https://doi.org/10.3390/app12031037
Wasif R, Tokhi MO, Shirkoohi G, Marks R, Rudlin J. Development of Permanently Installed Magnetic Eddy Current Sensor for Corrosion Monitoring of Ferromagnetic Pipelines. Applied Sciences. 2022; 12(3):1037. https://doi.org/10.3390/app12031037
Chicago/Turabian StyleWasif, Rukhshinda, Mohammad Osman Tokhi, Gholamhossein Shirkoohi, Ryan Marks, and John Rudlin. 2022. "Development of Permanently Installed Magnetic Eddy Current Sensor for Corrosion Monitoring of Ferromagnetic Pipelines" Applied Sciences 12, no. 3: 1037. https://doi.org/10.3390/app12031037
APA StyleWasif, R., Tokhi, M. O., Shirkoohi, G., Marks, R., & Rudlin, J. (2022). Development of Permanently Installed Magnetic Eddy Current Sensor for Corrosion Monitoring of Ferromagnetic Pipelines. Applied Sciences, 12(3), 1037. https://doi.org/10.3390/app12031037