
Uncertainty Analysis Based on Kriging Meta-Model for Acoustic-Structural Problems



Abstract
:1. Introduction
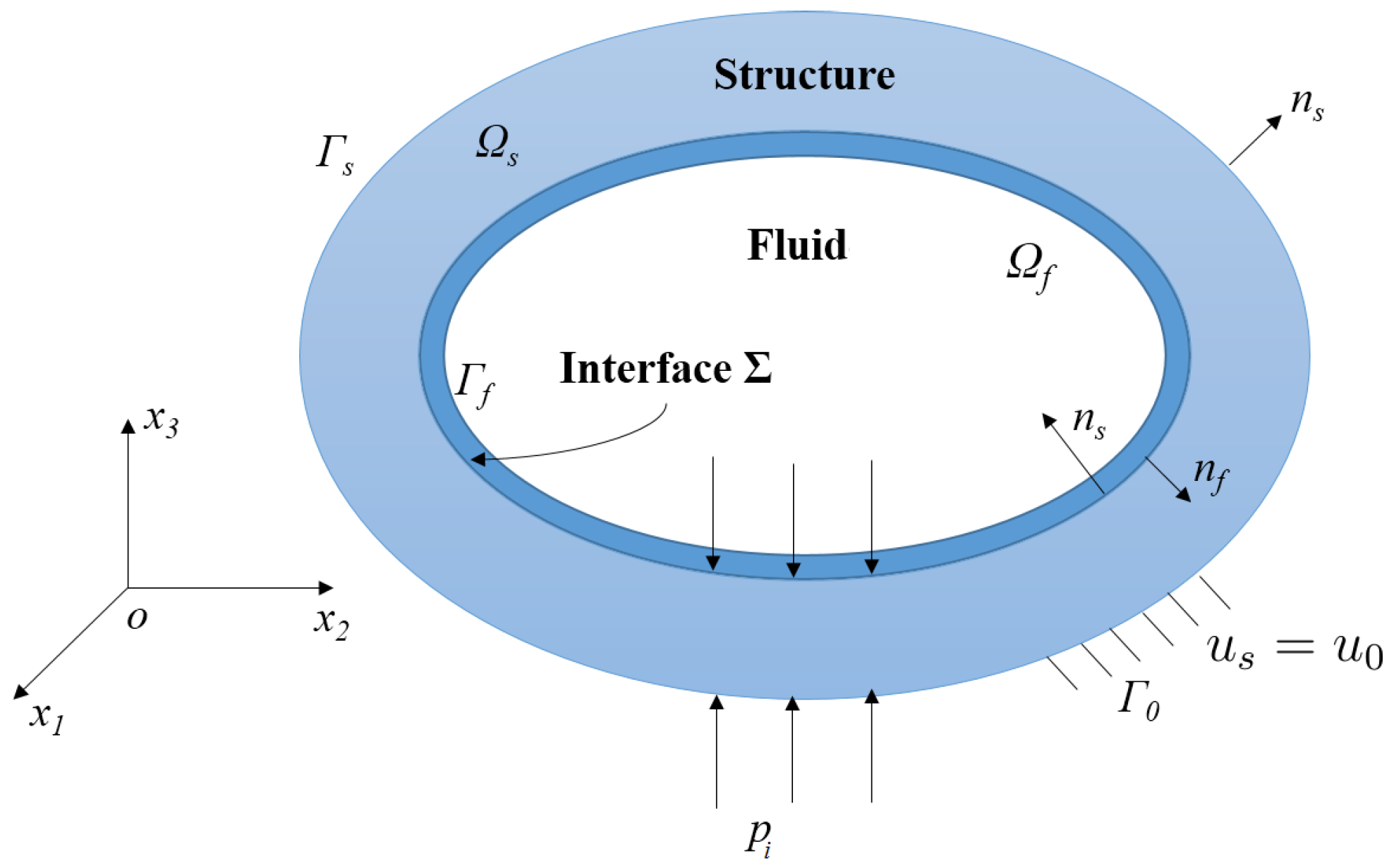
2. Vibro-Acoustic Formulation
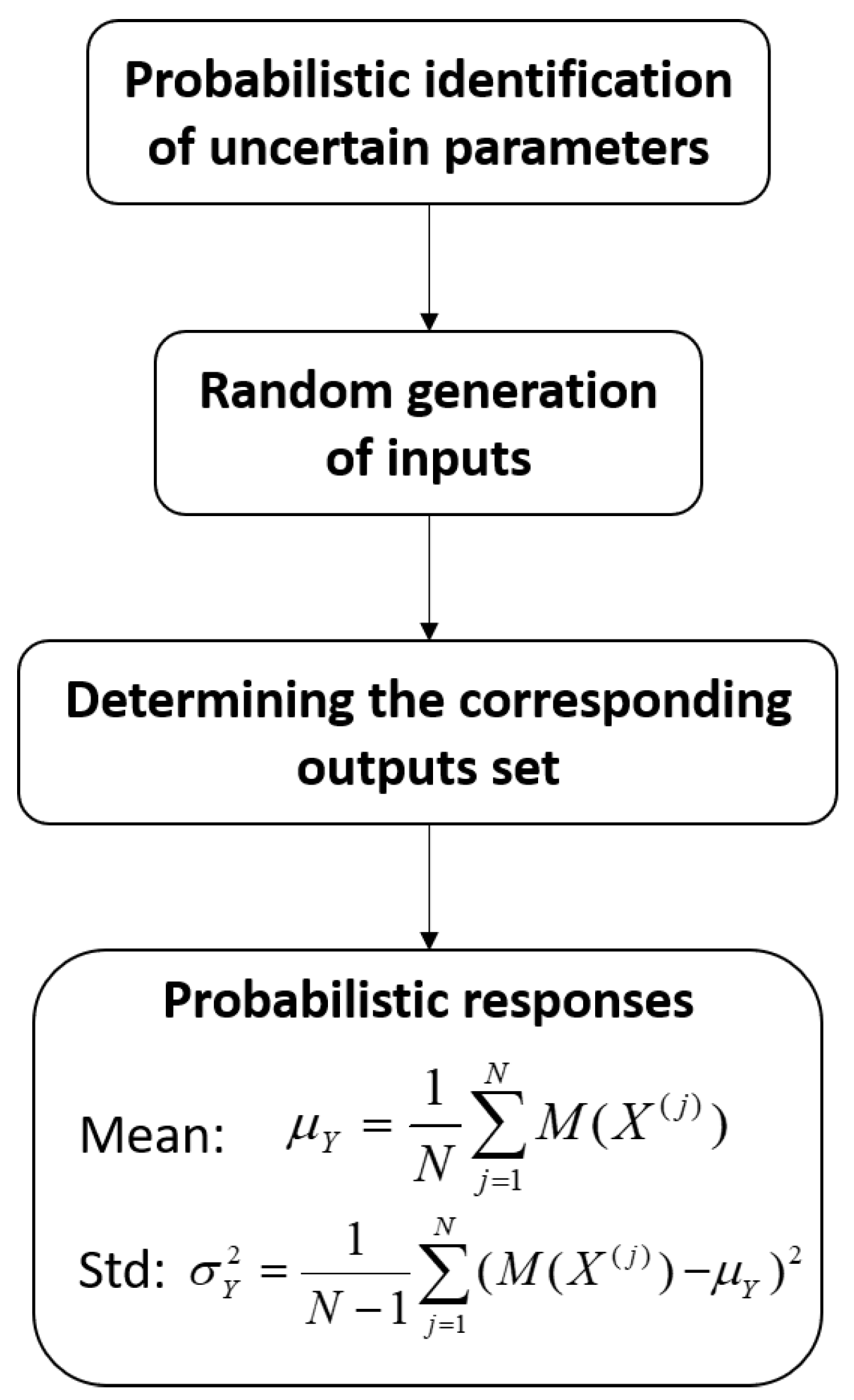
3. Monte Carlo Simulations
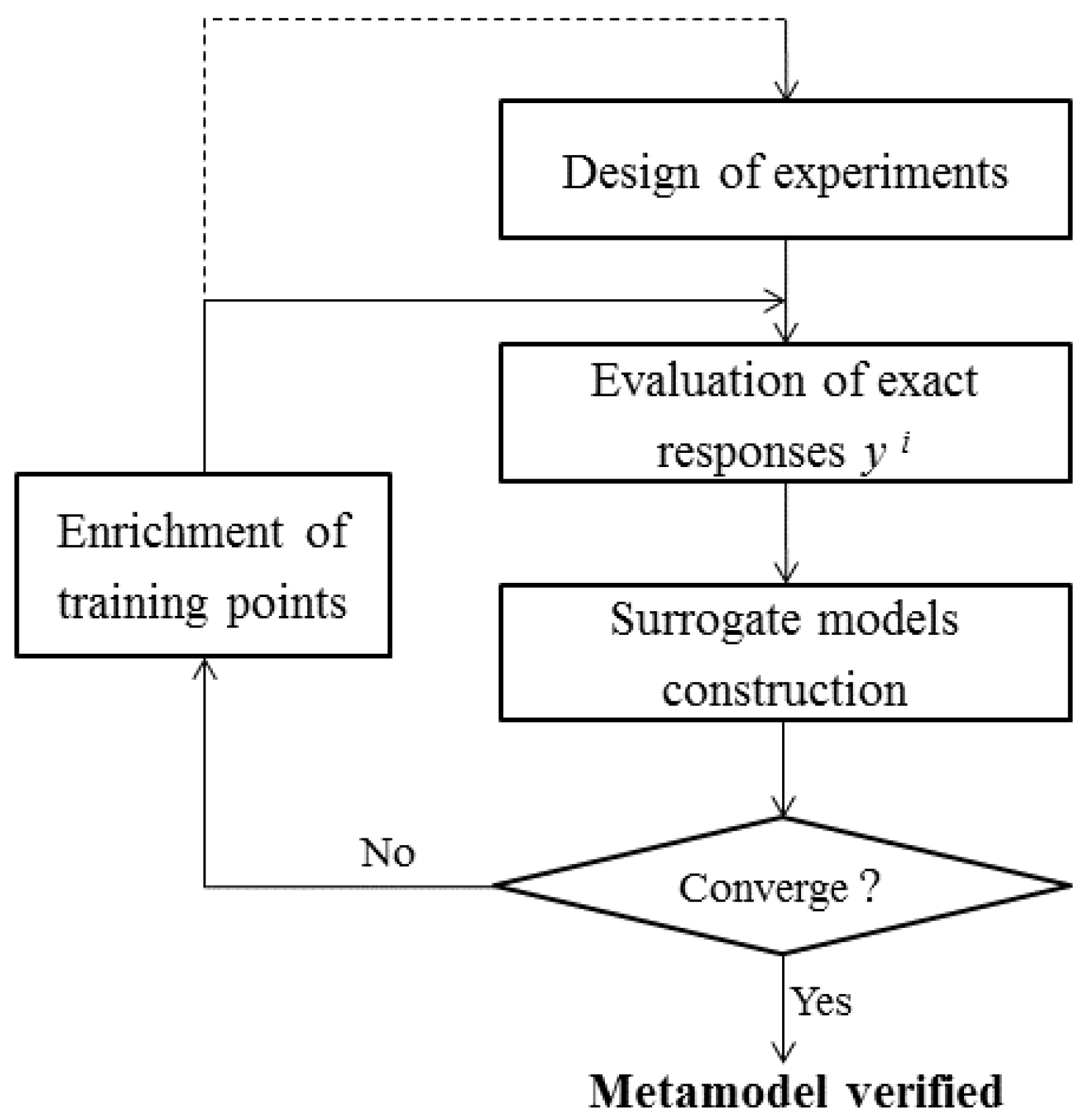
4. Surrogate Modeling Techniques
4.1. Generality
4.2. Kriging Meta-Model
4.3. Metamodel Validation
4.3.1. Error Measures
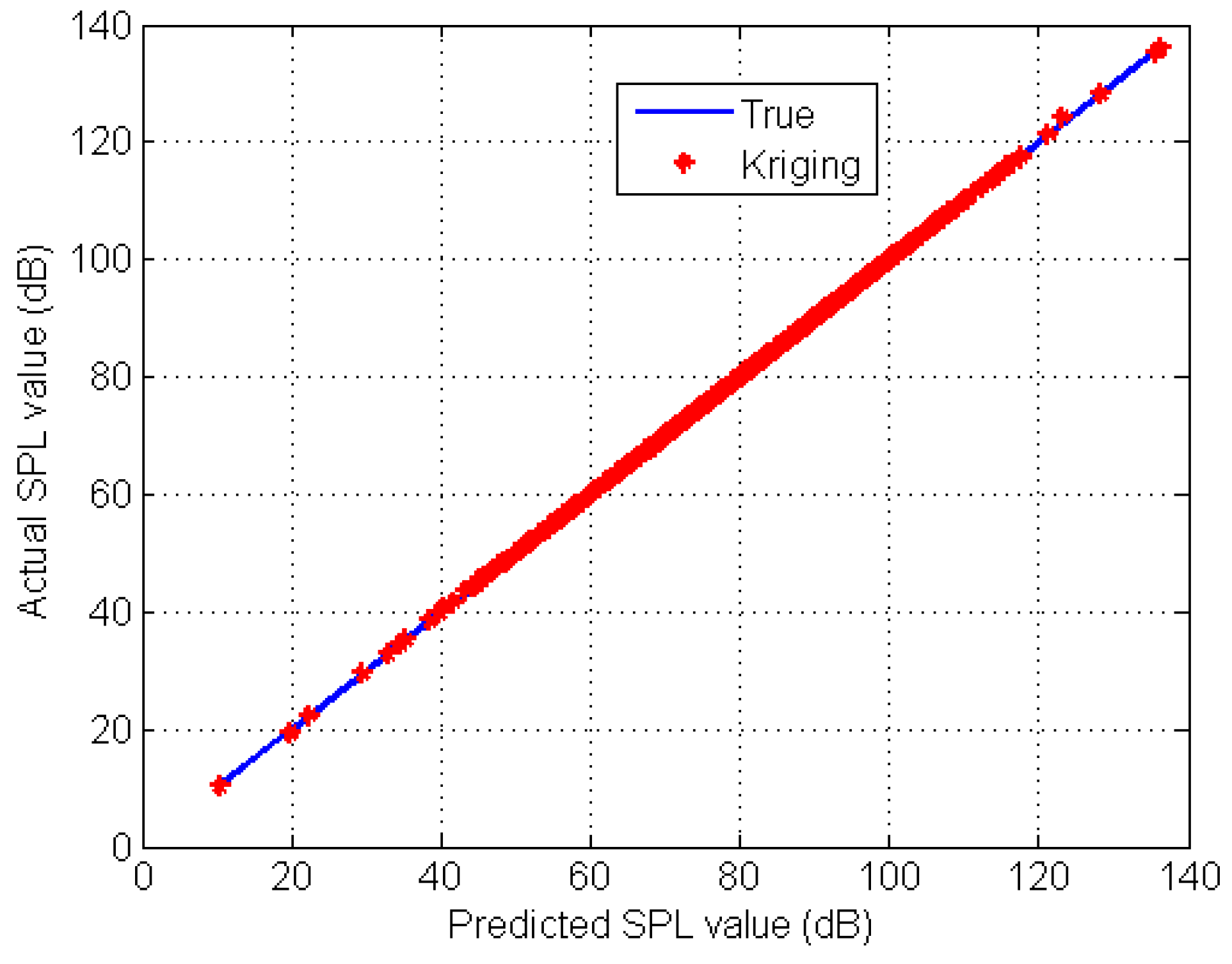
4.3.2. Cross Validation
5. Numerical Examples
5.1. Structural-Acoustic Model
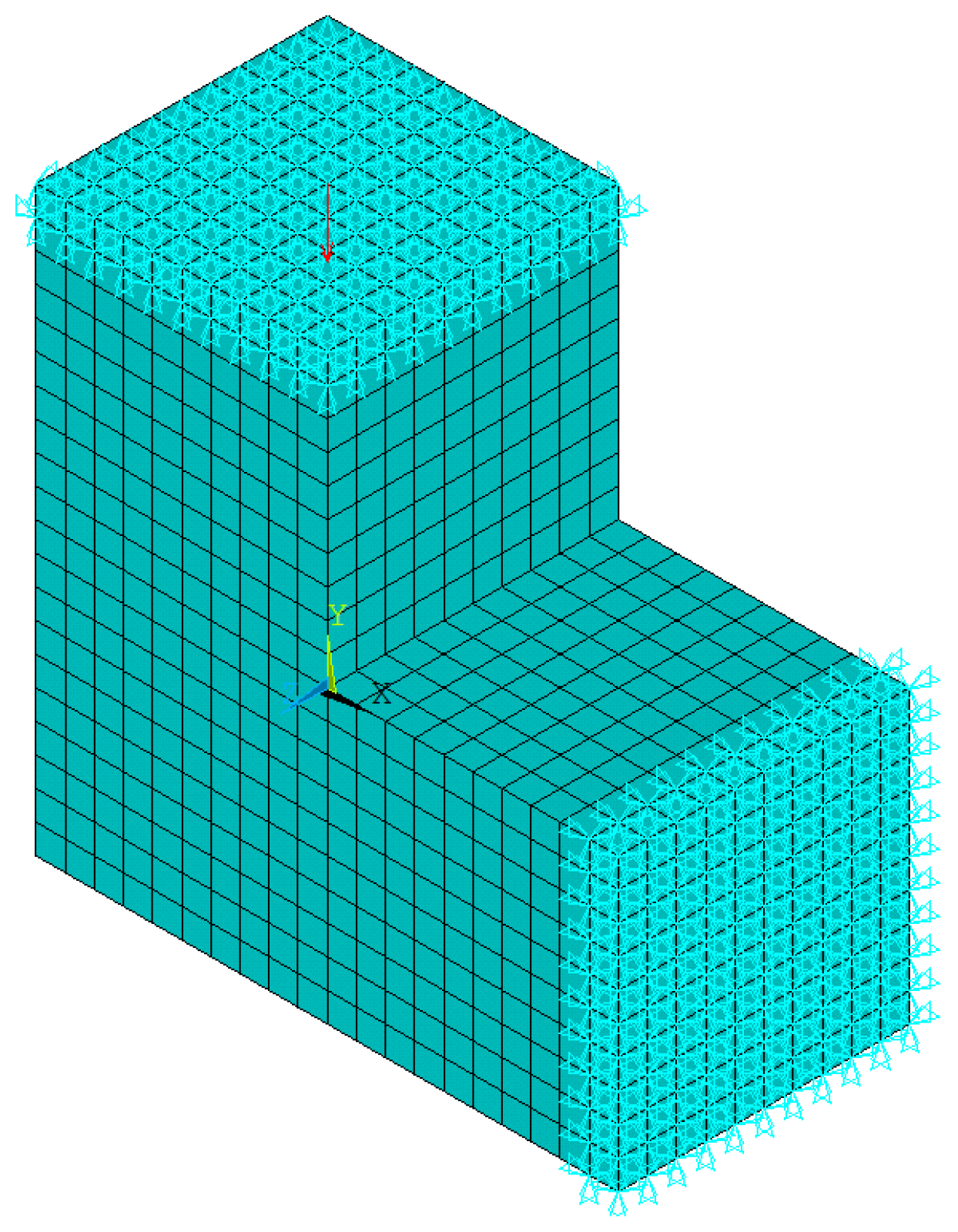
5.1.1. Deterministic FEM
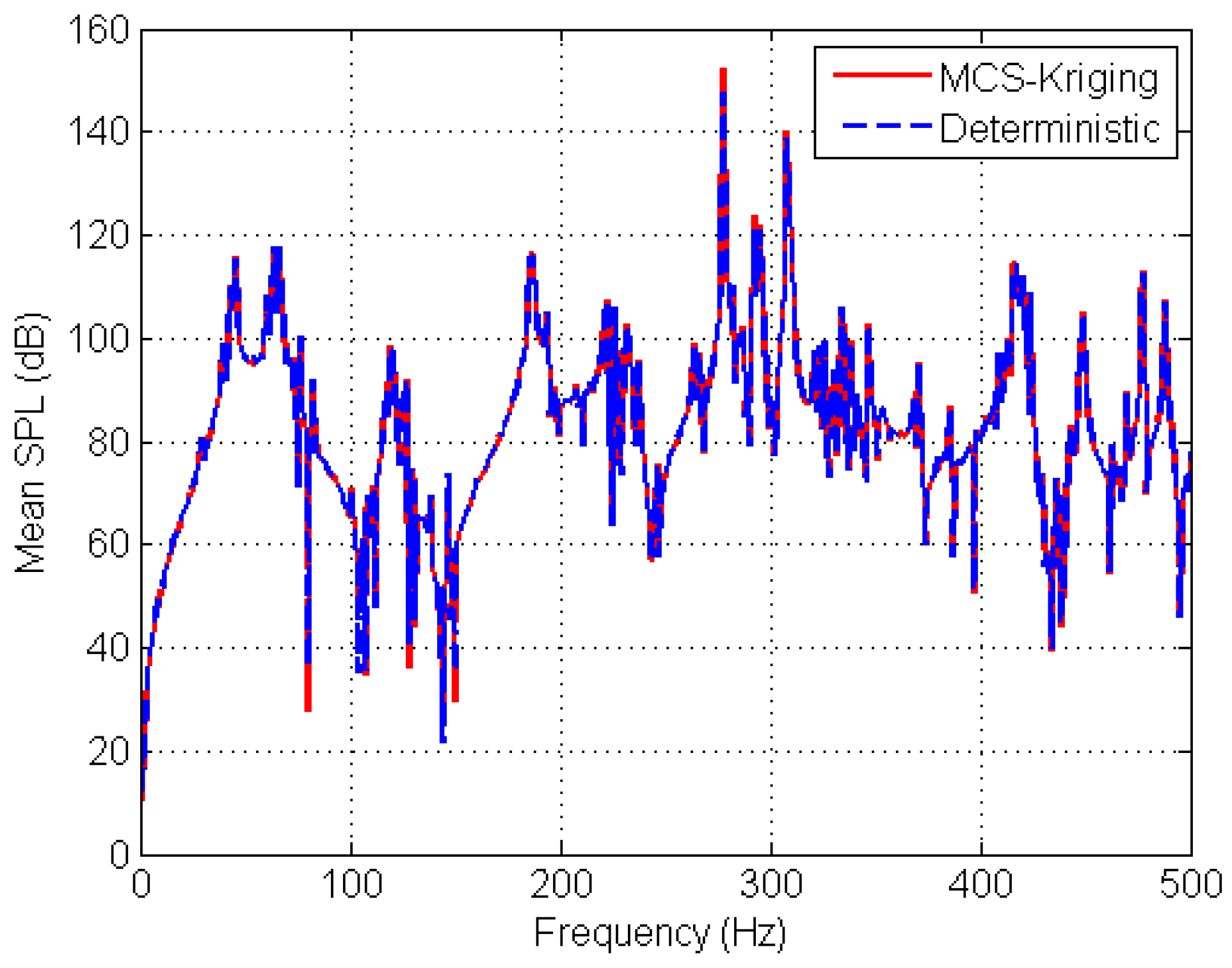
5.1.2. Proposed Uncertainty Analysis Based on Surrogate Model
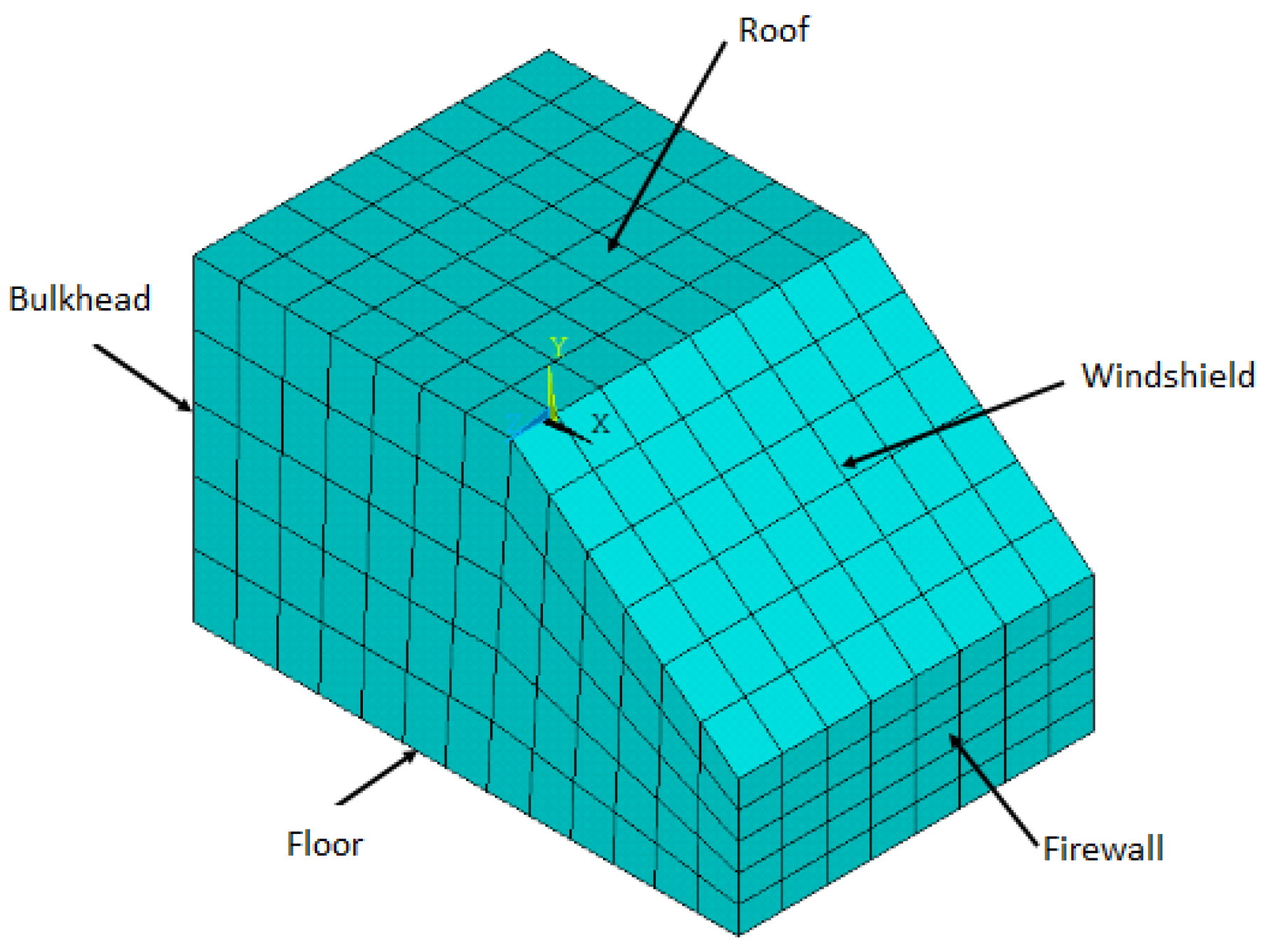
5.2. Simplified Car Interior with Flexible Plates
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FEM | Finite element method |
| MCS | Monte Carlo simulations |
| CV | Cross-validation |
| RSM | Response surface methodology |
| DOE | Design of experiments |
| LHS | Latin hypercube sampling |
| QRS | Quadratic response surface |
| BLUE | Best linear unbiased estimator |
| MAE | Maximum absolute error |
| RME | Relative mean error |
| RMSE | Root mean squared error |
| MSE | Mean squares error |
| SPL | Sound pressure level |
| Cov | Covariance |
References
- Craggs, A. An acoustic finite element approach for studying boundary flexibility and sound transmission between irregular enclosures. J. Sound Vib. 1973, 30, 343–357. [Google Scholar] [CrossRef]
- Nefske, D.; Wolf, J., Jr.; Howell, L. Structural-acoustic finite element analysis of the automobile passenger compartment: A review of current practice. J. Sound Vib. 1982, 80, 247–266. [Google Scholar] [CrossRef]
- Song, C.K.; Hwang, J.K.; Lee, J.M.; Hedrick, J.K. Active vibration control for structural–acoustic coupling system of a 3-D vehicle cabin model. J. Sound Vib. 2003, 267, 851–865. [Google Scholar] [CrossRef]
- Peretti, L.F.; Dowell, E.H. Asymptotic modal-analysis of a rectangular acoustic cavity excited by wall vibration. AIAA J. 1992, 30, 1991–1998. [Google Scholar] [CrossRef]
- Sum, K.S.; Pan, J. On acoustic and structural modal cross-couplings in plate-cavity systems. J. Acoust. Soc. Am. 2000, 107, 2021–2038. [Google Scholar] [CrossRef] [PubMed]
- Redonnet, S.; Cunha, G. An advanced hybrid method for the acoustic prediction. Adv. Eng. Softw. 2015, 88, 30–52. [Google Scholar] [CrossRef]
- Bös, J. Numerical optimization of the thickness distribution of three-dimensional structures with respect to their structural acoustic properties. Struct. Multidiscip. Optim. 2006, 32, 12–30. [Google Scholar] [CrossRef]
- Abbes, M.; Bouaziz, S.; Chaari, F.; Maatar, M.; Haddar, M. An acoustic-structural interaction modelling for the evaluation of a gearbox-radiation noise. Int. J. Mech. Sci. 2007, 50, 569–577. [Google Scholar] [CrossRef]
- Akrout, A.; Karra, C.; Hammami, L.; Haddar, M. Viscothermal fluid effects on vibro-acoustic behaviour of double elastic panels. Int. J. Mech. Sci. 2007, 50, 764–773. [Google Scholar] [CrossRef]
- Dammak, K.; Koubaa, S.; El hami, A.; Walha, L.; Haddar, M. Numerical modelling of vibro-acoustic problem in presence of uncertainty: Application to a vehicle cabin. Appl. Acoust. 2019, 144, 113–123. [Google Scholar] [CrossRef]
- Dammak, K.; El Hami, A.; Koubaa, S.; Walha, L.; Haddar, M. Reliability based design optimization of coupled acoustic-structure system using generalized polynomial chaos. Int. J. Mech. Sci. 2017, 134, 75–84. [Google Scholar] [CrossRef]
- Dammak, K.; Koubaa, S.; El Hami, A.; Walha, L.; Haddar, M. Numerical modeling of uncertainty in acoustic propagation via generalized Polynomial Chaos. J. Theor. Appl. Mech. 2019, 57, 3–15. [Google Scholar] [CrossRef]
- Sepahvand, K.; Marburg, S. On uncertainty quantification in vibroacoustic problems. In Proceedings of the 9th International Conference on Structural Dynamics, EURODYN, Porto, Portugal, 30 June–2 July 2014. [Google Scholar]
- Xia, B.; Yin, S.; Yu, D. A new random interval method for response analysis of structural–acoustic system with interval random variables. Appl. Acoust. 2015, 99, 31–42. [Google Scholar] [CrossRef]
- Hurtado, J.E.; Alvarez, D.A. The encounter of interval and probabilistic approaches to structural reliability at the design point. Comput. Methods Appl. Mech. Engrgy 2012, 225–228, 74–94. [Google Scholar] [CrossRef]
- Guerine, A.; El Hami, A.; Walha, L.; Fakhfakh, T.; Haddar, M. Dynamic response of a Spur gear system with uncertain friction coefficient. Adv. Eng. Softw. 2016, 120, 45–54. [Google Scholar] [CrossRef]
- Barillon, F.; Boubaker, M.; Mordillat, P.; Lardeur, P. Vibro-acoustic variability of a body in white using Monte Carlo simulation in a development process. In Proceedings of the Interantional Conference on Noise and Vibraiton Engineering (ISMA), Leuven, Belgium, 17–19 September 2012. [Google Scholar]
- Durand, J.F.; Gagliardini, L.; Soize, C. Random uncertainties modelling for vibroacoustic frequency response functions of cars. In International Conference on Modal Analysis, Noise and Vibration Engineering; Katholieke Univ Leuven: Leuven, Belgium, 2004; Volume 1, pp. 3255–3266. [Google Scholar]
- Gagliardini, L.; Durand, J.F.; Soize, C. Stochastic modeling of the vibro-acoustic behavior of production cars. J. Acoust. Soc. Am. 2008, 123, 3533. [Google Scholar] [CrossRef]
- Fernandez, C.; Soize, C.; Gagliardini, L. Sound-insulation layer modelling in car computational vibroacoustics in the medium-frequency range. Acta Acust. United Acust. 2010, 96, 437–444. [Google Scholar] [CrossRef] [Green Version]
- Sarkar, A.; Ghanem, R. Mid-frequency structural dynamics with parameter uncertainty. Comput. Methods Appl. Mech. Eng. 2002, 191, 5499–5513. [Google Scholar] [CrossRef]
- Knio, O.M.; Le Maitre, O. Uncertainty propagation in CFD using polynomial chaos decomposition. Fluid Dyn. Res. 2006, 38, 616. [Google Scholar] [CrossRef]
- Creamer, D.B. On using polynomial chaos for modeling uncertainty in acoustic propagation. J. Acoust. Soc. Am. 2006, 119, 1979–1994. [Google Scholar] [CrossRef]
- Sepahvand, K.; Scheffler, M.; Marburg, S. Uncertainty quantification in natural frequencies and radiated acoustic power of composite plates: Analytical and experimental investigation. Appl. Acoust. 2015, 87, 23–29. [Google Scholar] [CrossRef]
- Forrester, A.; Sobester, A.; Keane, A. Engineering Design via Surrogate Modelling: A Practical Guide; Wiley: New York, NY, USA, 2008. [Google Scholar]
- Jin, R.; Du, X.; Chen, W. The use of metamodeling techniques for optimization under uncertainty. Struct. Multidiscip. Optim. 2003, 25, 99–116. [Google Scholar] [CrossRef]
- Dey, S.; Mukhopadhyay, T.; Adhikari, S. Metamodel based high-fidelity stochastic analysis of composite laminates: A concise review with critical comparative assessment. Compos. Struct. 2017, 171, 227–250. [Google Scholar] [CrossRef] [Green Version]
- Abid, F.; Dammak, K.; El Hami, A.; Merzouki, T.; Trabelsi, H.; Walha, L.; Haddar, M. Surrogate models for uncertainty analysis of micro-actuator. Microsyst. Technol. 2020, 26, 2589–2600. [Google Scholar] [CrossRef]
- Laurent, L.; Boucard, P.A.; Soulier, B. Generation of a cokriging metamodel using a multiparametric strategy. Comput. Mech. 2013, 51, 151–169. [Google Scholar] [CrossRef] [Green Version]
- Dammak, K.; El Hami, A. Multi-objective reliability based design optimization using Kriging surrogate model for cementless hip prosthesis. Comput. Methods Biomech. Biomed. Eng. 2020, 23, 854–867. [Google Scholar] [CrossRef]
- Debich, B.; Yaich, A.; Dammak, K.; El Hami, A.; Gafsi, W.; Walha, L.; Haddar, M. Integration of multi-objective reliability-based design optimization into thermal energy management: Application on phase change material-based heat sinks. J. Energy Storage 2021, 41, 102906. [Google Scholar] [CrossRef]
- Simpson, T.; Peplinski, J.; Koch, P.; Allen, J. On the use of statistics in design and the implications for deterministic computer experiments. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Sacramento, CA, USA, 14–17 September 1997. [Google Scholar]
- Myers, R.; Montgomery, D. Response Surface Methodology, 2nd ed.; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Kurtaran, H.; Eskandarian, A.; Marzougui, D.; Bedewi, N.E. Crashworthiness design optimization using successive response surface approximations. Comput. Mech. 2002, 29, 409–421. [Google Scholar] [CrossRef]
- Dey, S.; Mukhopadhyay, T.; Khodaparast, H.H.; Kerfriden, P.; Adhikari, S. Rotational and ply-level uncertainty in response of composite shallow conical shells. Compos. Struct. 2015, 131, 594–605. [Google Scholar] [CrossRef] [Green Version]
- Janusevskis, J.; Le Riche, R. Simultaneous kriging-based estimation and optimization of mean response. J. Glob. Optim. 2013, 55, 313–336. [Google Scholar] [CrossRef]
- Mukhopadhyay, T.; Chakraborty, S.; Dey, S.; Adhikari, S.; Chowdhury, R. A critical assessment of Kriging model variants for high-fidelity uncertainty quantification in dynamics of composite shells. Arch. Comput. Methods Eng. 2017, 24, 495–518. [Google Scholar] [CrossRef]
- Dammak, K.; El Hami, A. Thermal reliability-based design optimization using Kriging model of PCM based pin fin heat sink. Int. J. Heat Mass Transf. 2021, 166, 120745. [Google Scholar] [CrossRef]
- Miriyala, S.S.; Mittal, P.; Majumdar, S.; Mitra, K. Comparative study of surrogate approaches while optimizing computationally expensive reaction networks. Chem. Eng. Sci. 2016, 140, 44–61. [Google Scholar] [CrossRef]
- Miriyala, S.S.; Subramanian, V.R.; Mitra, K. TRANSFORM-ANN for online optimization of complex industrial processes: Casting process as case study. Eur. J. Oper. Res. 2018, 264, 294–309. [Google Scholar] [CrossRef]
- Kinsler, L.; Frey, A. Fundamental of Acoustics; John Wiley & SonsNew: New York, NY, USA, 1962. [Google Scholar]
- Morse, P.; Ingardku. Theoretical Acoustics; McGraw-Hill Book Company: New York, NY, USA, 1968. [Google Scholar]
- Larbi, W.; Deü, J.; Ohayon, R. Vibroacoustic analysis of double-wall sandwich panels with viscoelastic core. Comput. Struct. 2016, 174, 92–103. [Google Scholar] [CrossRef]
- Lupea, I.; Szatmari, R. Vibroacoustic Frequency Response on a Passenger Compartment. J. Vibroeng. 2010, 4, 406–418. [Google Scholar]
- McKay, M.; Beckman, R.; Conover, W. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Stander, N.; Roux, W.; Goel, T.; Eggleston, T.; Craig, K. LS-Opt User’s Manual; Technical Report; Livermore Software Technology Corporation: Livermore, CA, USA, 2010. [Google Scholar]
- Ryberg, A.; Domeij, B.; Nilsson, L. Metamodel-Based Multidisciplinary Design Optimization for Automotive Applications; Technical Report; Linköping University, Division of Solid Mechanics: Linköping, Sweden, 2012. [Google Scholar]
- Meckesheimer, M.; Booker, A.; Barton, R.; Simpson, T. Computationally inexpensive metamodel assessment strategies. AIAA J. 2002, 40, 2053–2060. [Google Scholar] [CrossRef]
- Forrester, A.I.; Keane, A.J. Recent advances in surrogate-based optimization. Prog. Aerosp. Sci. 2009, 45, 50–79. [Google Scholar] [CrossRef]
- Xia, B.; Yu, D. Optimization based on reliability and confidence interval design for the structural-acoustic system with interval probabilistic variables. J. Sound Vib. 2015, 336, 1–15. [Google Scholar] [CrossRef]
- Nielsen, H.; Lophaven, S.; Søndergaard, J.; Dace, A. A Matlab Kriging Toolbox; Technical Report; Technical University of Denmark: Kongens Lyngby, Denmark, 2002. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Mean Value | Cov | Distribution Type |
|---|---|---|---|
| E (Pa) | 2.1 × | 0.05 | Normal |
| (kg/m) | 7850 | 0.05 | Normal |
| (mm) | 4 | 0.02 | Uniform |
| (mm) | 2 | 0.02 | Uniform |
| Error Measures | 20 LHS Points | 30 LHS Points |
|---|---|---|
| MAE (dB) | 2.255 × | 1.269 × |
| RME | 5.191 × | 4.125 × |
| RMSE | 5.851 × | 8.926 × |
| Structure | Elasticity (Pa) | Poisson’s Ratio | Density (kg/m) |
|---|---|---|---|
| Steel | 2.1 × 10 | 7850 | |
| Glass | 6.2 × 10 | 2300 |
| Panel | Thickness Value (mm) |
|---|---|
| firewall () | 0.8 |
| bulkhead () | 0.8 |
| roof () | 0.7 |
| floor () | 0.9 |
| windshield () | 5 |
| Variables | Mean Value | Cov | Distribution Type |
|---|---|---|---|
| (Pa) | 2.1 × 10 | 0.05 | Normal |
| (Pa) | 6.2 × 10 | 0.05 | Normal |
| (kg/m) | 1.21 | 0.05 | Normal |
| (mm) | 0.8 | 0.02 | Uniform |
| (mm) | 5 | 0.02 | Uniform |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baklouti, A.; Dammak, K.; El Hami, A. Uncertainty Analysis Based on Kriging Meta-Model for Acoustic-Structural Problems. Appl. Sci. 2022, 12, 1503. https://doi.org/10.3390/app12031503
Baklouti A, Dammak K, El Hami A. Uncertainty Analysis Based on Kriging Meta-Model for Acoustic-Structural Problems. Applied Sciences. 2022; 12(3):1503. https://doi.org/10.3390/app12031503
Chicago/Turabian StyleBaklouti, Ahmad, Khalil Dammak, and Abdelkhalak El Hami. 2022. "Uncertainty Analysis Based on Kriging Meta-Model for Acoustic-Structural Problems" Applied Sciences 12, no. 3: 1503. https://doi.org/10.3390/app12031503