
An Improved Analytical Approach for Segmental Joint Rotational Behavior Considering the Elastic Gasket



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Analytical Approach for the Joint Rotational Behavior
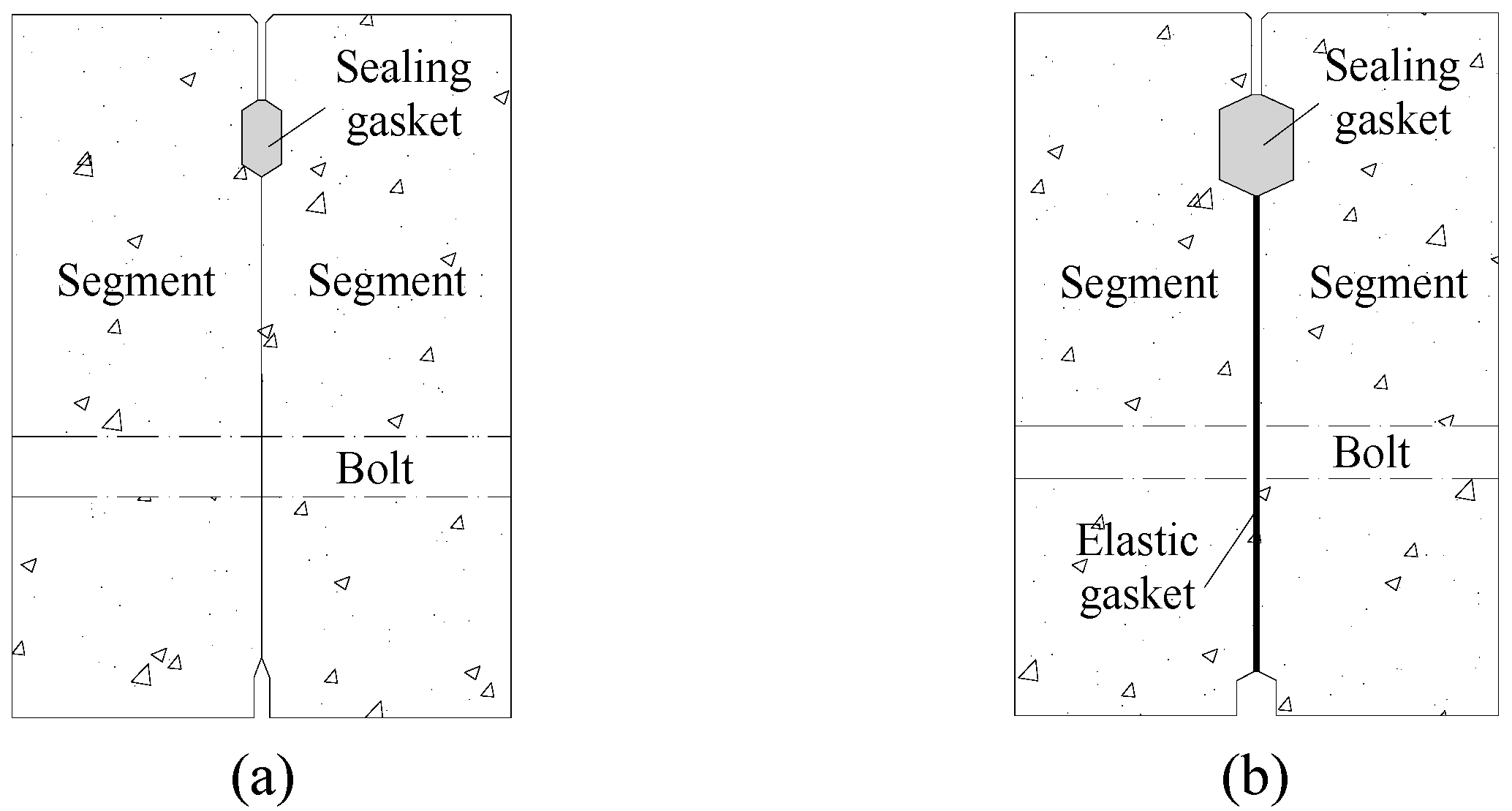
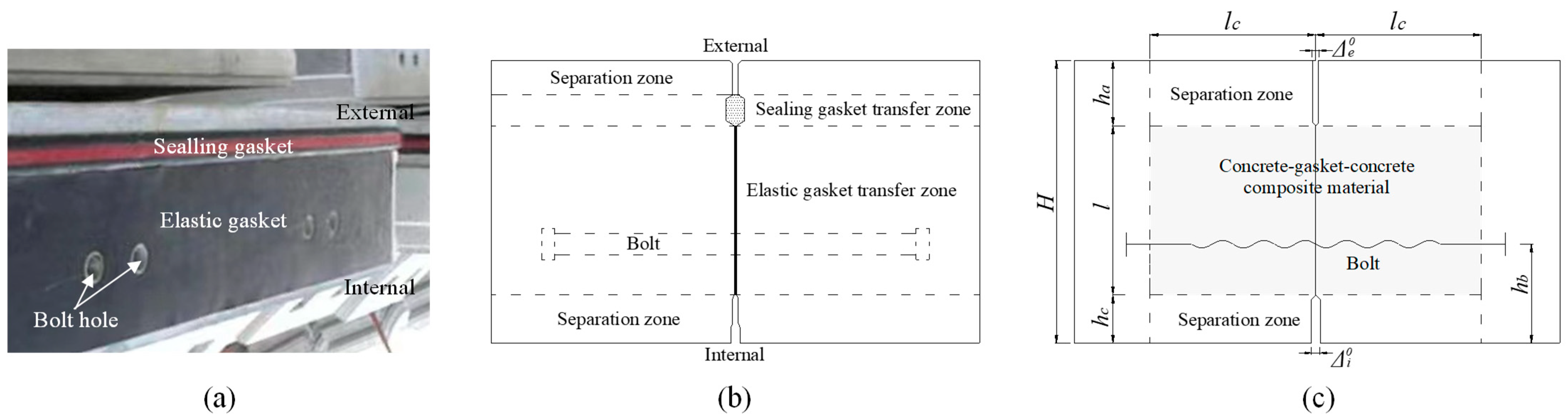
2.1. Modeling Assumptions
2.2. Materials
2.2.1. Concrete
2.2.2. Bolt
2.2.3. Gasket
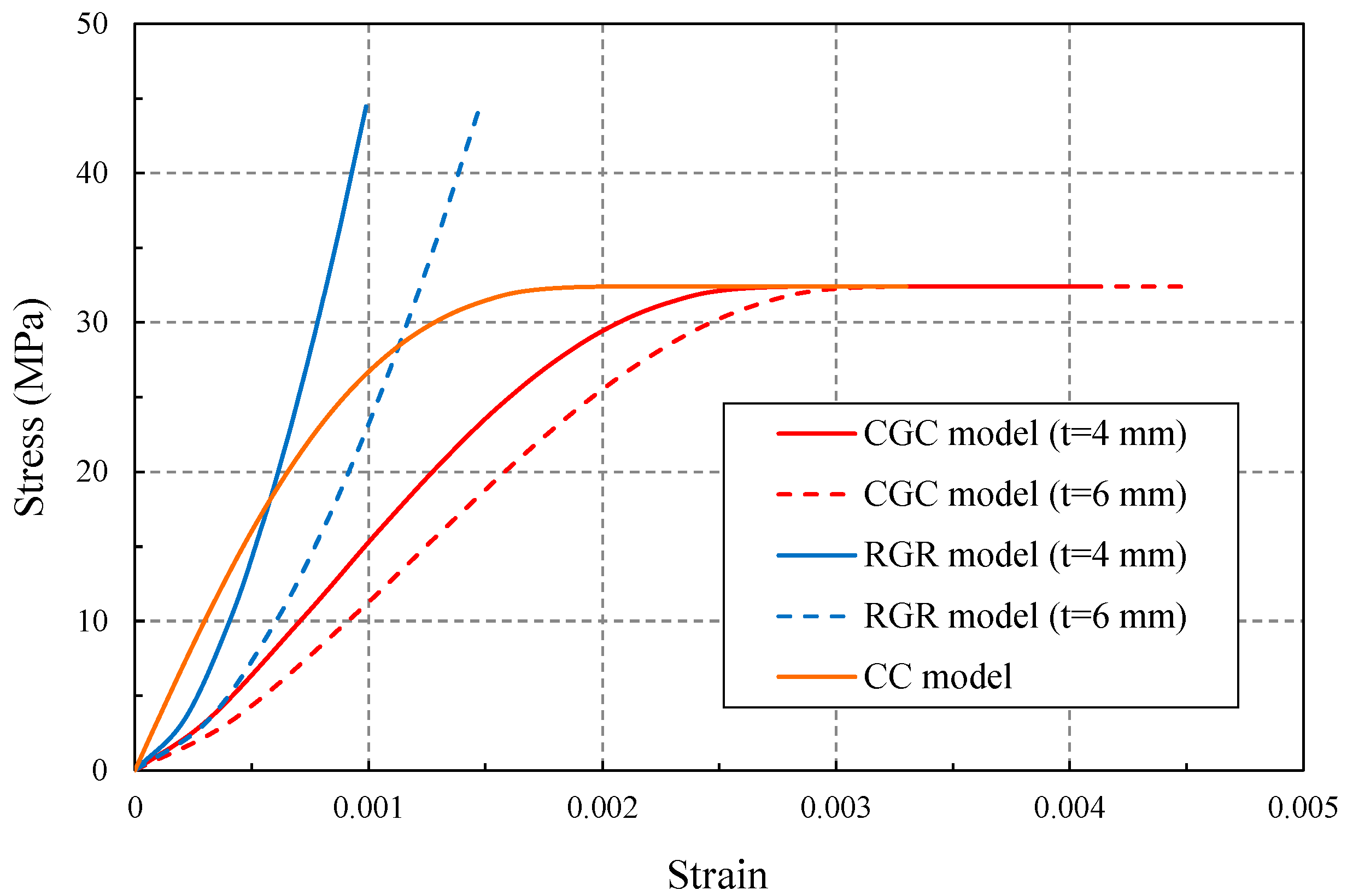
2.2.4. Composite
- Concrete–EG–concrete (CGC) model
- Rigid–EG–rigid (RGR) model
- Concrete–concrete (CC) model
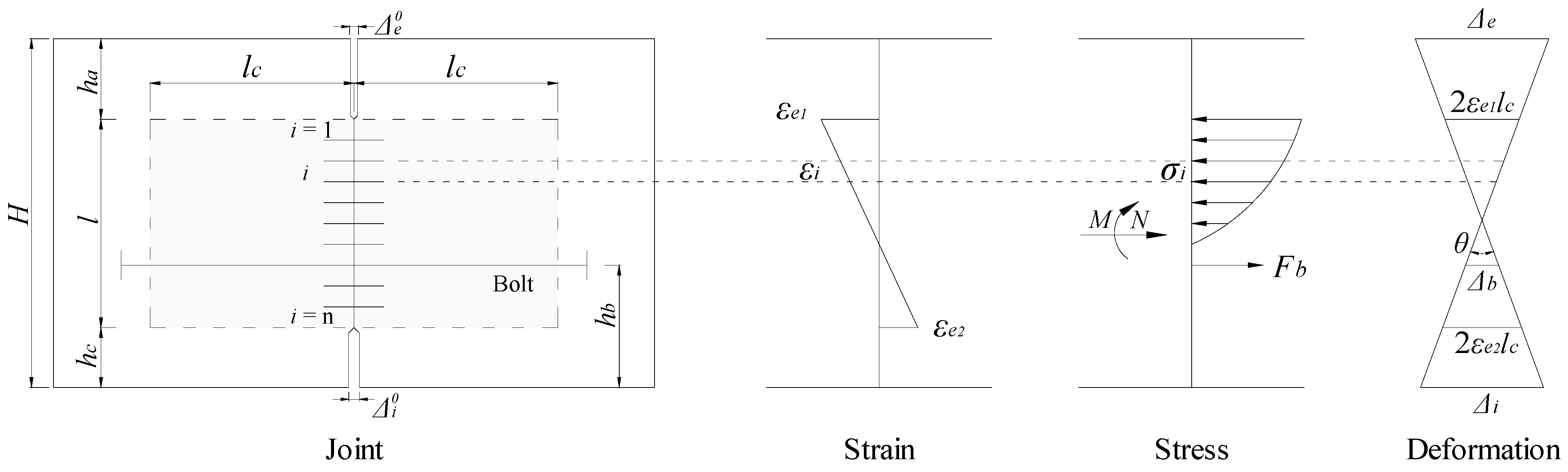
2.3. Equilibrium Equations
3. Validations of the Analytical Approach
3.1. Experimental Bending Tests
- Concrete: Type C50, and fc = 32.4 MPa.
- Bolt: n = 2, Eb = 210 GPa, Lb = 431 mm, Ab = 452.2 mm2, F0 = 20 kN, and fb = 640 MPa.
- EG: Ee = 2480 MPa, β = 1.67, t = 4 mm in the sagging-moment scenario, and t = 6 mm in the hogging-moment scenario.
3.2. Numerical Bending Tests
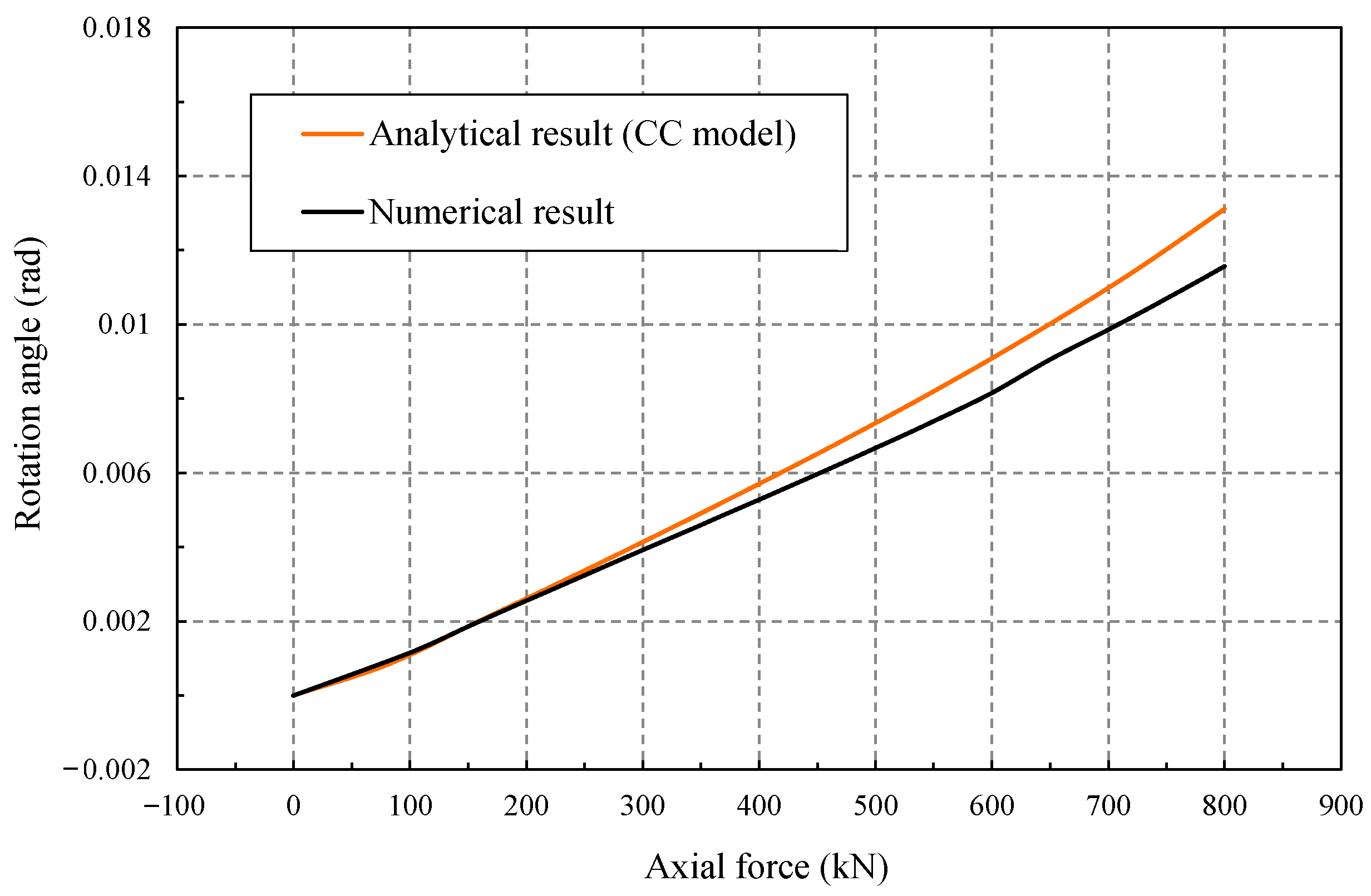
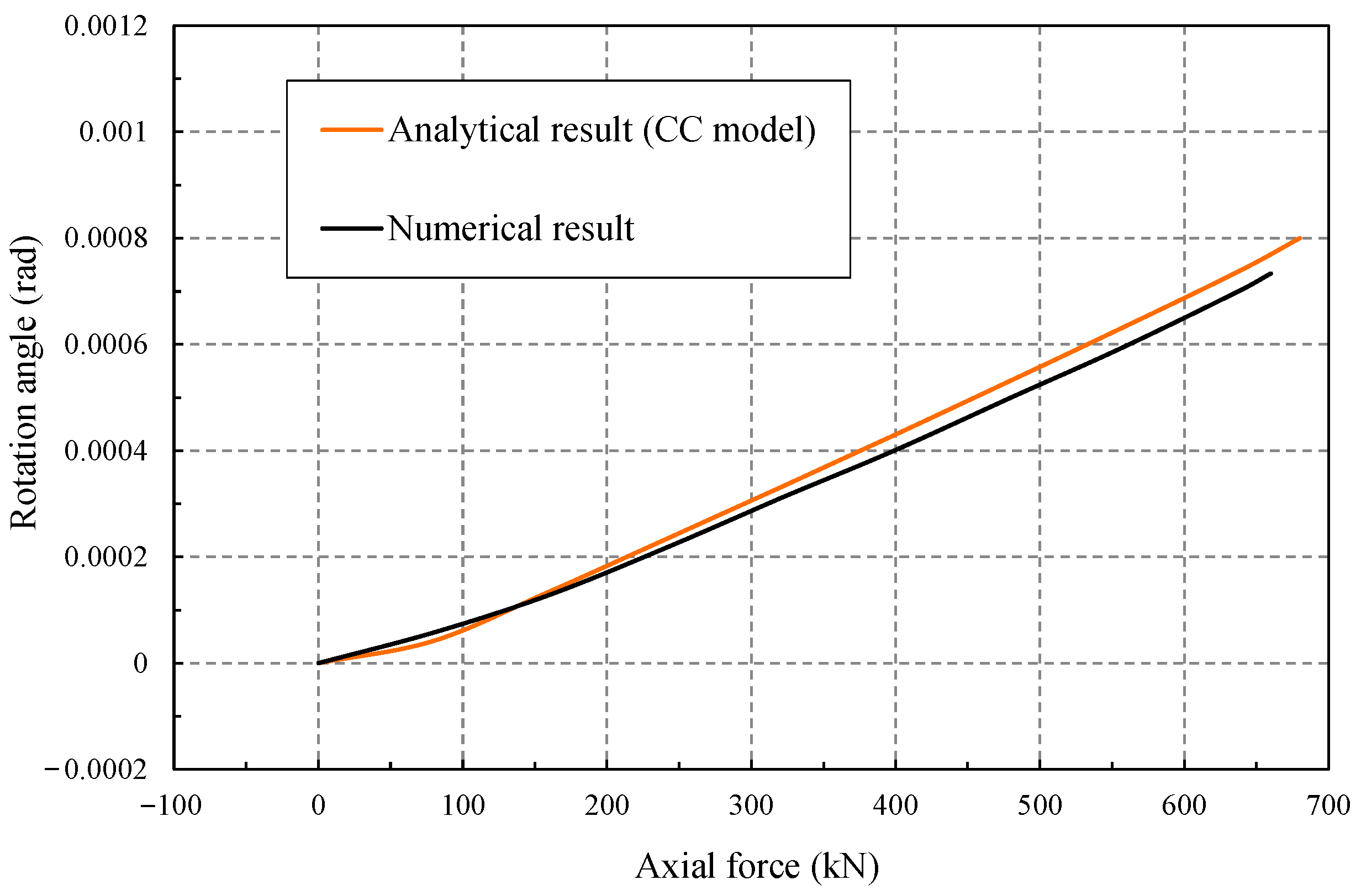
3.3. Comparison and Validation
3.3.1. Joint with Elastic Gasket
3.3.2. Joint without Elastic Gasket
4. Parametric Study
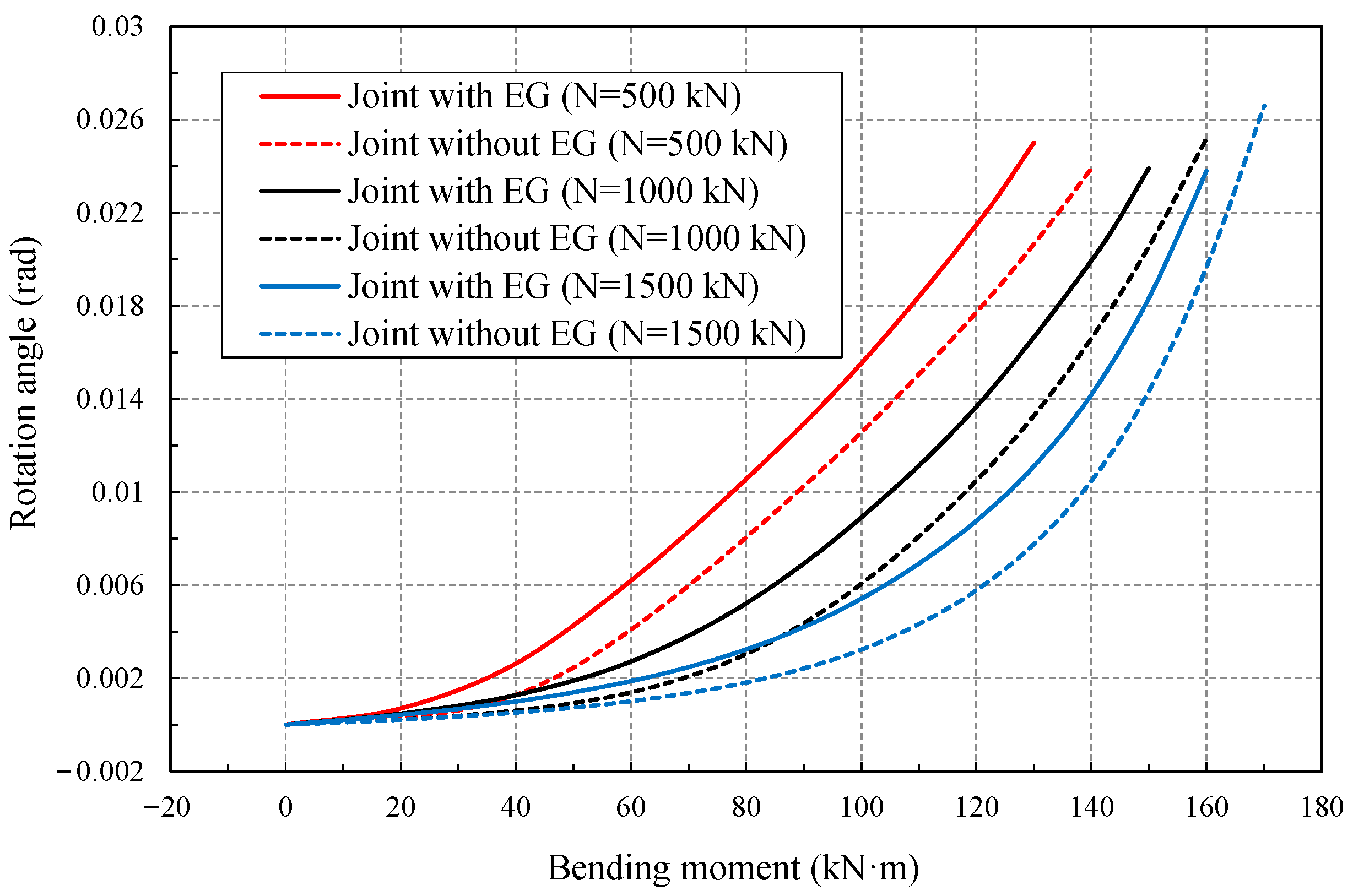
4.1. Effect of the Axial Force
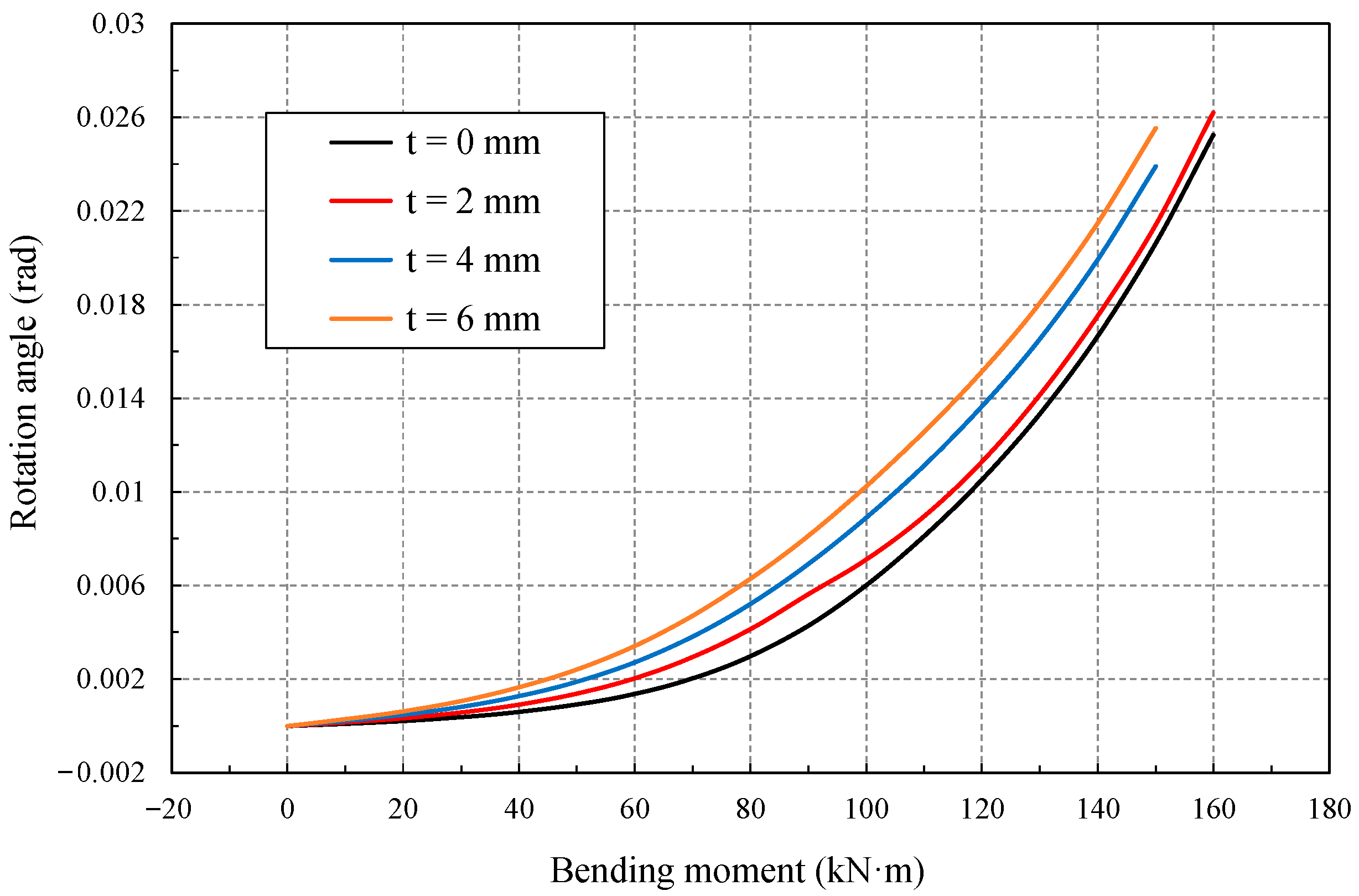
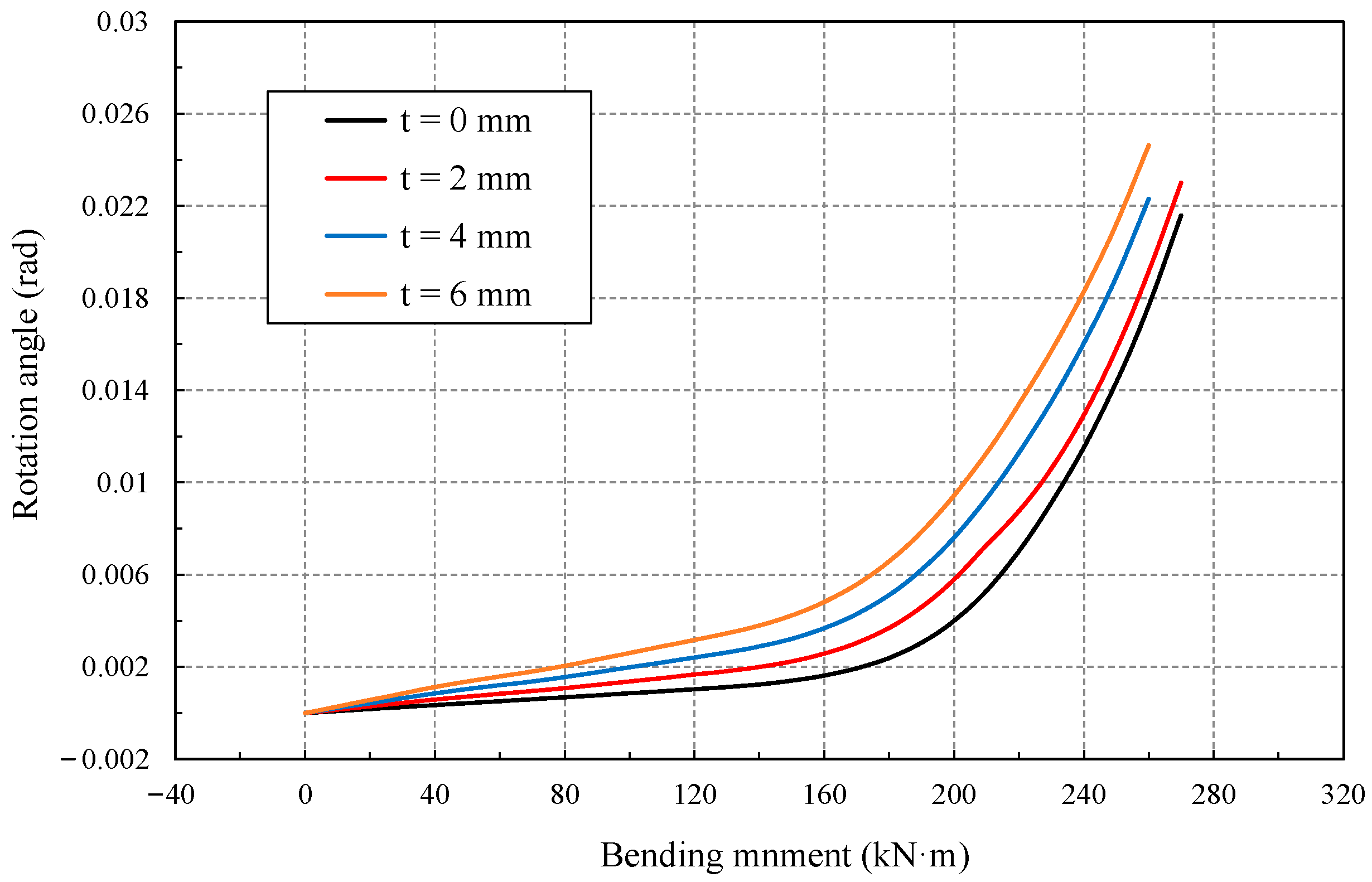
4.2. Effect of the EG Thickness
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cho, S.H.; Kim, J.; Won, J.; Kim, M.K. Effects of Jack Force and Construction Steps on the Change of Lining Stresses in a TBM Tunnel. KSCE J. Civ. Eng. 2017, 21, 1135–1146. [Google Scholar] [CrossRef]
- Luciani, A.; Peila, D. Tunnel Waterproofing: Available Technologies and Evaluation Through Risk Analysis. Int. J. Civ. Eng. 2019, 17, 45–59. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, B.; Zhang, G. The Influence of Dislocation on the Stress and Waterproof Performance of Shield Tunnel Joint. China Civ. Eng. J. 2020, 53, 63–68. [Google Scholar]
- Ding, W.Q.; Yue, Z.Q.; Tham, L.G.; Zhu, H.H.; Lee, C.F.; Hashimoto, T. Analysis of Shield Tunnel. Int. J. Numer. Anal. Met. 2004, 28, 57–91. [Google Scholar] [CrossRef]
- Lee, K.M.; Hou, X.Y.; Ge, X.W.; Tang, Y. An Analytical Solution for a Jointed Shield-driven Tunnel Lining. Int. J. Numer. Anal. Met. 2010, 25, 365–390. [Google Scholar] [CrossRef]
- Do, N.; Dias, D.; Oreste, P.; Djeran-Maigre, I. 2D Numerical Investigation of Segmental Tunnel Lining Behavior. Tunn. Undergr. Space Technol. 2013, 37, 115–127. [Google Scholar] [CrossRef]
- Arnau, O.; Molins, C. Experimental and Analytical Study of the Structural Response of Segmental Tunnel Linings Based on an in Situ Loading Test. Part 1: Test Configuration and Execution. Tunn. Undergr. Space Technol. 2011, 26, 764–777. [Google Scholar] [CrossRef] [Green Version]
- ITA. Guidelines for the Design of Shield Tunnel Lining. Tunn. Undergr. Space Technol. 2000, 15, 303–331. [Google Scholar] [CrossRef]
- Li, X.; Yan, Z.; Wang, Z.; Zhu, H. A Progressive Model to Simulate the Full Mechanical Behavior of Concrete Segmental Lining Longitudinal Joints. Eng. Struct. 2015, 93, 97–113. [Google Scholar] [CrossRef]
- Avanaki, M.J.; Hoseini, A.; Vahdani, S.; Fuente, A. Numerical-aided Design of Fiber Reinforced Concrete Tunnel Segment Joints Subjected to Seismic Loads. Constr. Build. Mater. 2018, 170, 40–54. [Google Scholar] [CrossRef]
- Wu, B.; Luo, Y.; Zang, J. Thermal Behavior of Tunnel Segment Joints Exposed to Fire and Strengthening of Fire-damaged Joints with Concrete-filled Steel Tubes. Appl. Sci. 2019, 9, 1781. [Google Scholar] [CrossRef] [Green Version]
- Lorenzo, S.G. The Role of Temporary Spear Bolts in Gasketed Longitudinal Joints of Concrete Segmental Linings. Tunn. Undergr. Space Technol. 2020, 105, 103576. [Google Scholar] [CrossRef]
- Janssen, P. Tragverhalten Von Tunnelausbauten Mit Gelenktübbings. Ph.D. Thesis, Technische Universität, Braunschweig, Germany, 1983. [Google Scholar]
- Koyama, Y. Study on the Improvement of Design Method of Segments for Shield-Driven Tunnels; RTRI Report: Special; RTRI: Tokyo, Japan, 2000; pp. 156–163. [Google Scholar]
- Blom, C. Design Philosophy of Concrete Linings for Tunnels in Soft Soils. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2002. [Google Scholar]
- Zhong, X.; Zhu, W.; Huang, Z.; Han, Y. Effect of Joint Structure on Joint Stiffness for Shield Tunnel Lining. Tunn. Undergr. Space Technol. 2006, 21, 406–407. [Google Scholar] [CrossRef]
- Shen, Y.; Yan, Z.; Zhu, H. An Analytical Mechanical Model for Tunnel Segmental Joints Subjected to Elevated Temperatures. In Proceedings of the International Symposium on Systematic Approaches to Environmental Sustainability in Transportation, Fairbanks, AK, USA, 2–5 August 2015; pp. 329–340. [Google Scholar] [CrossRef]
- Lei, M.; Lin, D.; Shi, C.; Ma, J.; Yang, W. A Structural Calculation Model of Shield Tunnel Segment: Heterogeneous Equivalent Beam Model. Adv. Civ. Eng. 2018, 2018, 9637838. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Guo, C.; Fu, D. A Study on the Stiffness Model of Circular Tunnel Prefabricated Lining. Chin. J. Geotech. Eng. 2000, 309–313. [Google Scholar] [CrossRef]
- Jiang, H.; Hou, X. Theoretical Study of Rotating Stiffness of Joint in Shield Tunnel Segments. Chin. J. Rock Mech. Eng. 2004, 23, 1574–1577. [Google Scholar] [CrossRef]
- Xia, C.; Zeng, G.; Bian, Y. Method for Determining Bending Stiffness of Shield Tunnel Segment Rings Longitudinal Joint Based on Fix-point Iteration. Chin. J. Rock Mech. Eng. 2014, 33, 901–912. [Google Scholar]
- Liu, T.J.; Huang, H.H.; Xu, R.; Tang, X.W.; Wang, S.Y. An Analytical Solution for the Failure Process of a Shield Tunnel Segmental Joint with a Load-transferring Gasket. In GSIC 2018: Proceedings of GeoShanghai 2018 International Conference: Tunnelling and Underground Construction; Zhang, D., Huang, X., Eds.; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Yang, F.; Cao, S.; Li, Q. An Analytical Model for the Rotational Behavior of Concrete Segmental Lining Longitudinal Joints with Gaskets. Adv. Struct. Eng. 2019, 22, 2866–2881. [Google Scholar] [CrossRef]
- Yang, F.; Cao, S.; Qin, G. Simplified Spring Models for Concrete Segmental Lining Longitudinal Joints with Gaskets. Tunn. Undergr. Space Technol. 2020, 96, 103227. [Google Scholar] [CrossRef]
- Cavalaro, S.; Aguado, A. Packer Behavior under Simple and Coupled Stresses. Tunn. Undergr. Space Technol. 2012, 28, 159–173. [Google Scholar] [CrossRef]
- Zhang, J.; He, C. Analysis on Mechanical Properties of Segment Joints with Different Pressure Pads. J. China Rail. Soc. 2013, 35, 101–105. [Google Scholar] [CrossRef]
- Tvede-Jensen, B.; Faurschou, M.; Kasper, T. A Modelling Approach for Joint Rotations of Segmental Concrete Tunnel Linings. Tunn. Undergr. Space Technol. 2017, 67, 61–67. [Google Scholar] [CrossRef]
- GB 50010-2010(2015); Code for Design of Concrete Structures. China Architecture and Building Press: Beijing, China, 2010.
- Zhou, H.Y.; Chen, T.G.; Li, L.X. Study on Joint Bending Stiffness and Influencing Factors of Metro Shield Tunnelling Lining. Ind. Constr. 2010, 40, 59–61. [Google Scholar] [CrossRef]
- Arnau, O.; Molins, C. Three Dimensional Structural Response of Segmental Tunnel Linings. Eng. Struct. 2012, 44, 210–221. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Chen, W.; Yang, F. Study of the Interface Mechanical Properties of Concrete Segments in Shield Tunnels. Mod. Tunn. Technol. 2015, 52, 119–126. [Google Scholar] [CrossRef]
- Yuan, Q.; Liang, F.; Fang, Y. Numerical Simulation and Simplified Analytical Model for the Longitudinal Joint Bending Stiffness of a Tunnel Considering Axial Force. Struct. Concr. 2021, 22, 3368–3384. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, M.; Yang, F. An Improved Analytical Approach for Segmental Joint Rotational Behavior Considering the Elastic Gasket. Appl. Sci. 2022, 12, 1512. https://doi.org/10.3390/app12031512
Huang M, Yang F. An Improved Analytical Approach for Segmental Joint Rotational Behavior Considering the Elastic Gasket. Applied Sciences. 2022; 12(3):1512. https://doi.org/10.3390/app12031512
Chicago/Turabian StyleHuang, Ming, and Fan Yang. 2022. "An Improved Analytical Approach for Segmental Joint Rotational Behavior Considering the Elastic Gasket" Applied Sciences 12, no. 3: 1512. https://doi.org/10.3390/app12031512
APA StyleHuang, M., & Yang, F. (2022). An Improved Analytical Approach for Segmental Joint Rotational Behavior Considering the Elastic Gasket. Applied Sciences, 12(3), 1512. https://doi.org/10.3390/app12031512